

Structural Evaluation of Cable Bolts under Static Loading




Abstract
1. Introduction
2. Literature Review
2.1. Rock Bursts
2.2. Ground Support System Elements
2.2.1. Reinforcement Support Elements
2.2.2. Surface Supports
2.3. Testing of Ground Support Systems
2.3.1. Blast Testing
2.3.2. Drop Test
2.3.3. Double Shear Test
2.3.4. Numerical Analysis
3. Materials and Methods
3.1. ACARP and Jennmar
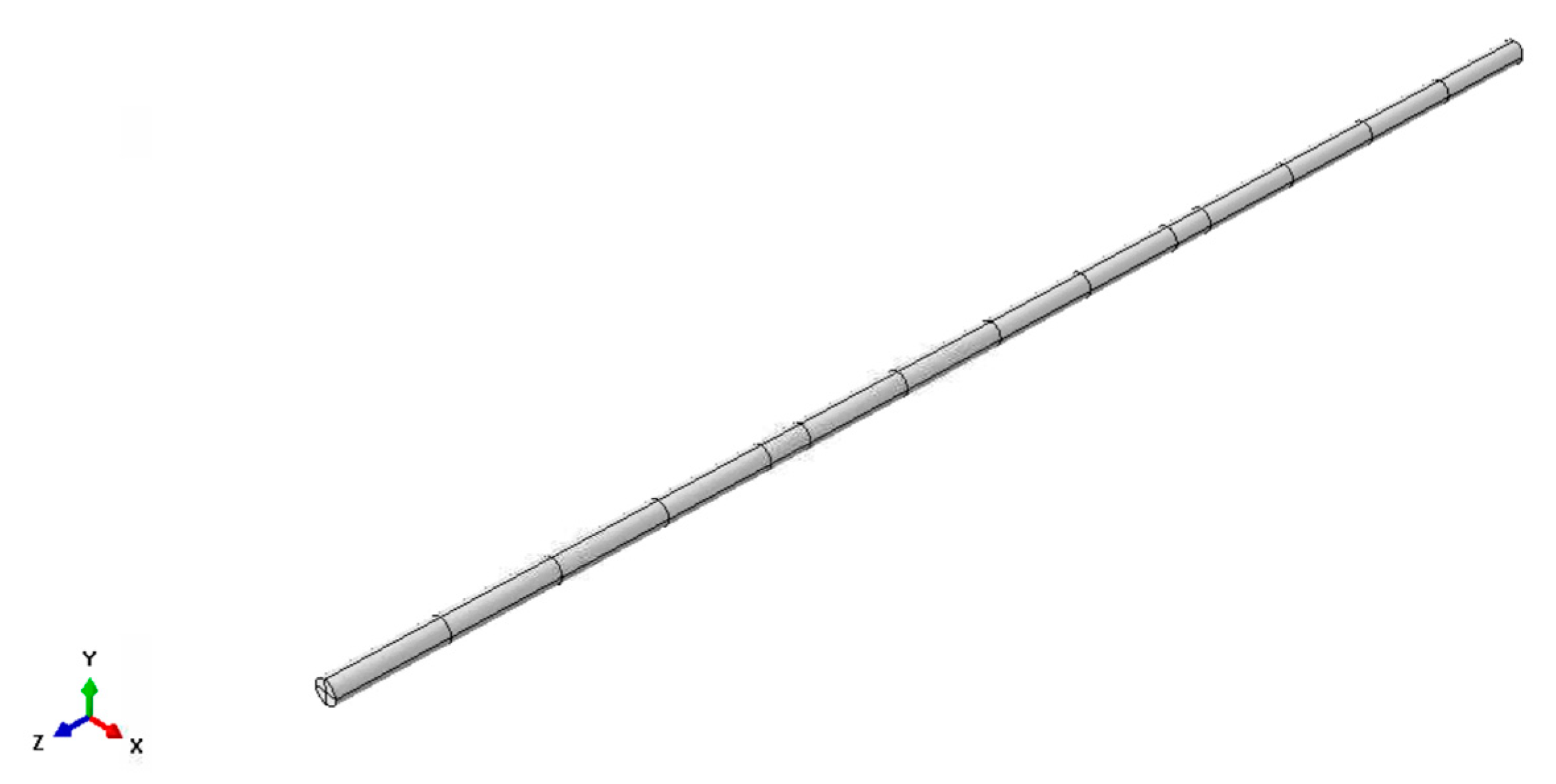
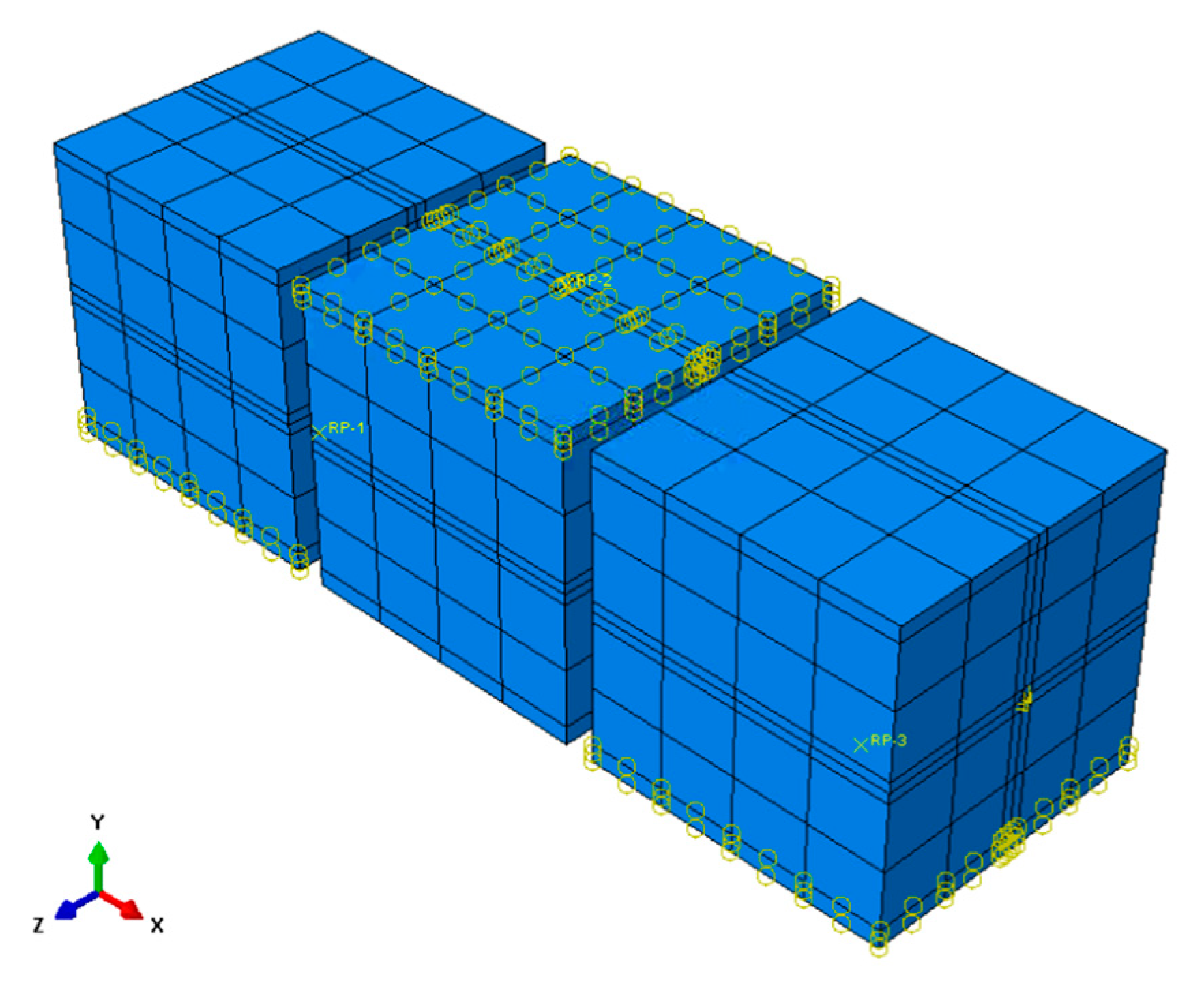
3.2. Model Geometry
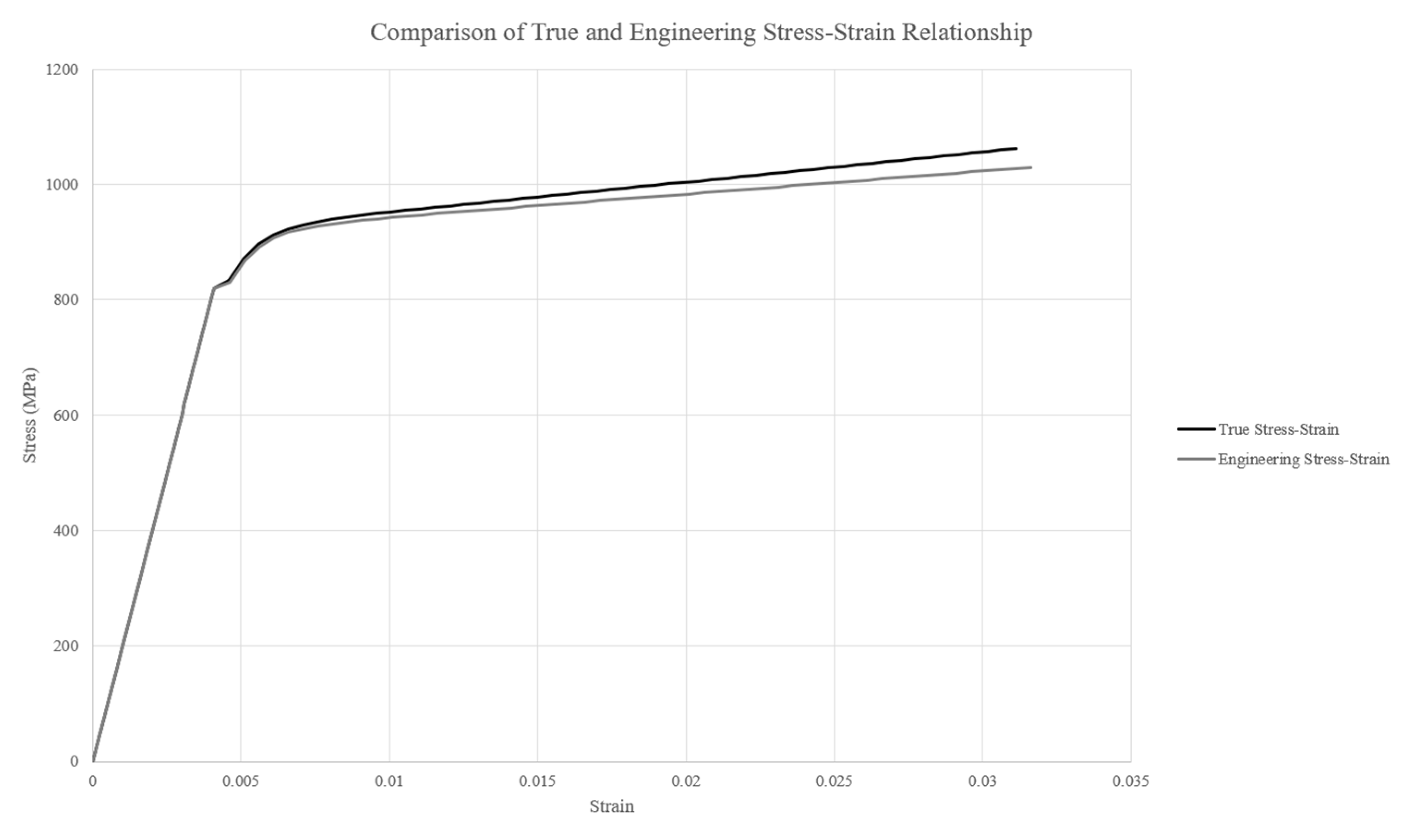
3.3. Material Properties
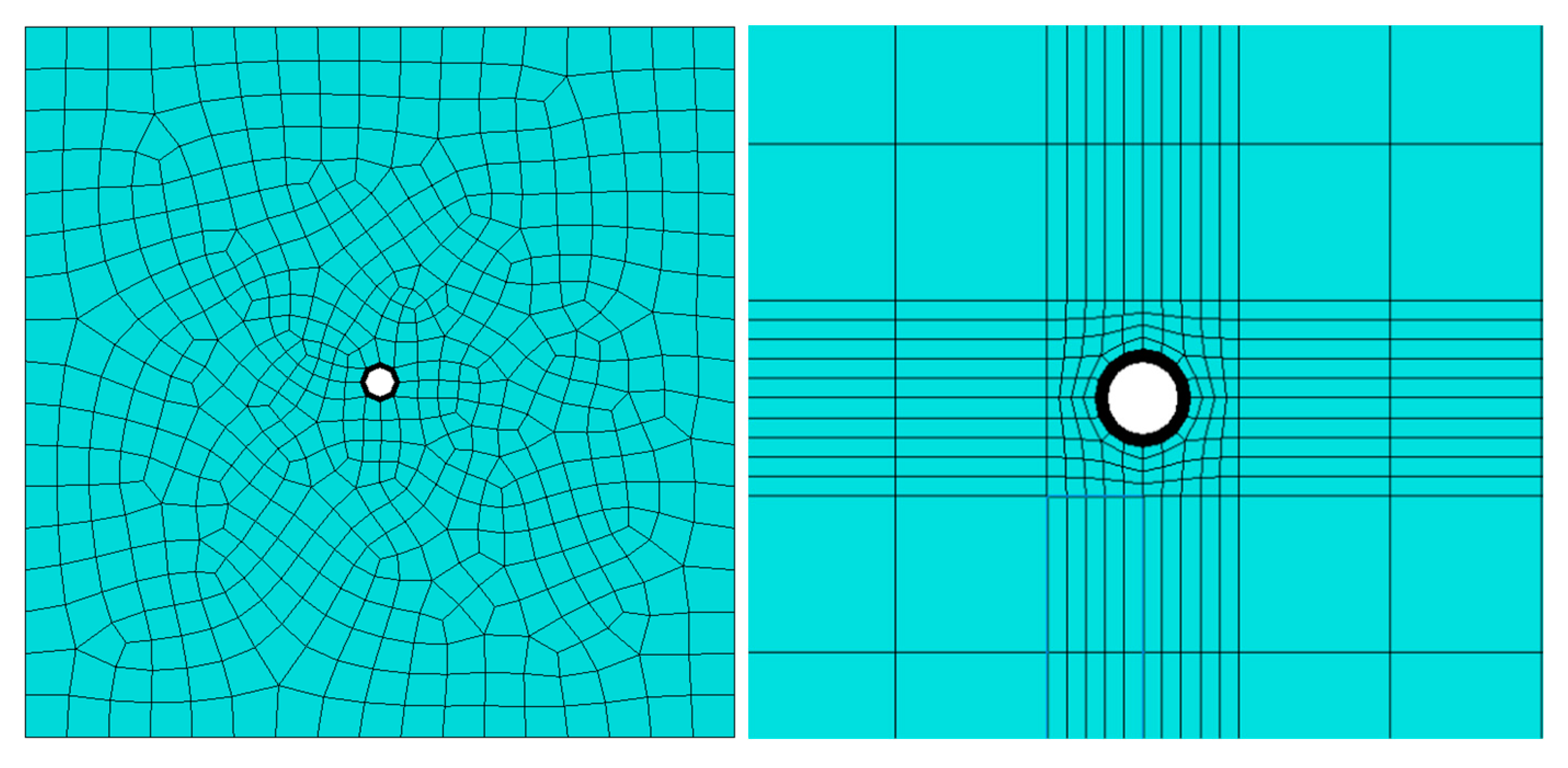
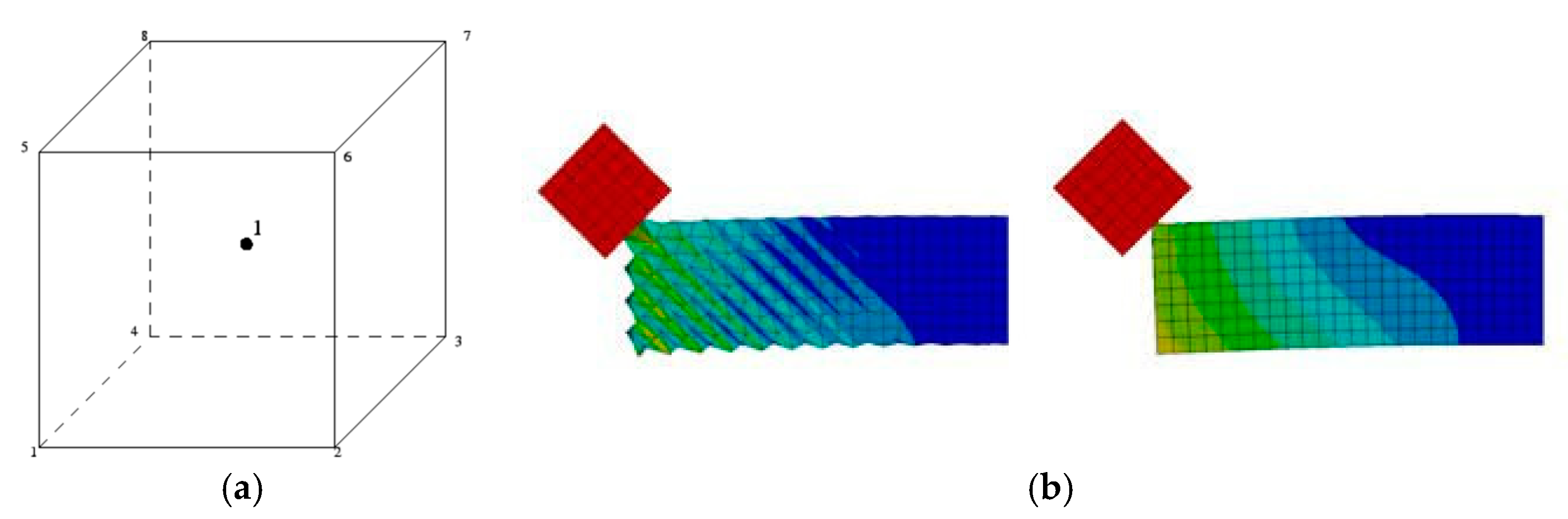
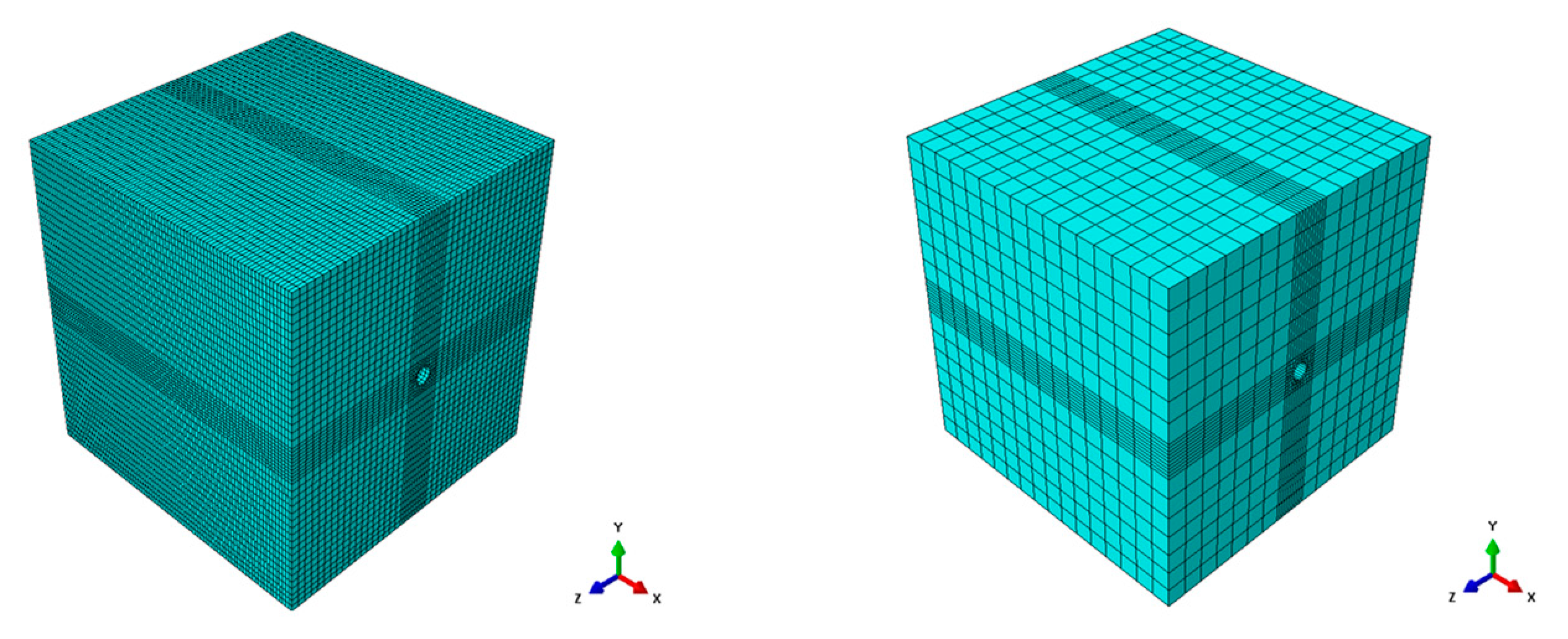
3.4. Mesh Generation
3.5. Interactions and Rigid Bodies
- The larger surface should be the master;
- If approximately the same size, the stiffer body should be the master;
- If similar size and stiffness, the surface with the coarser mesh should be the master.
3.6. Boundary Conditions and Loads
3.7. Assembly
3.8. Step
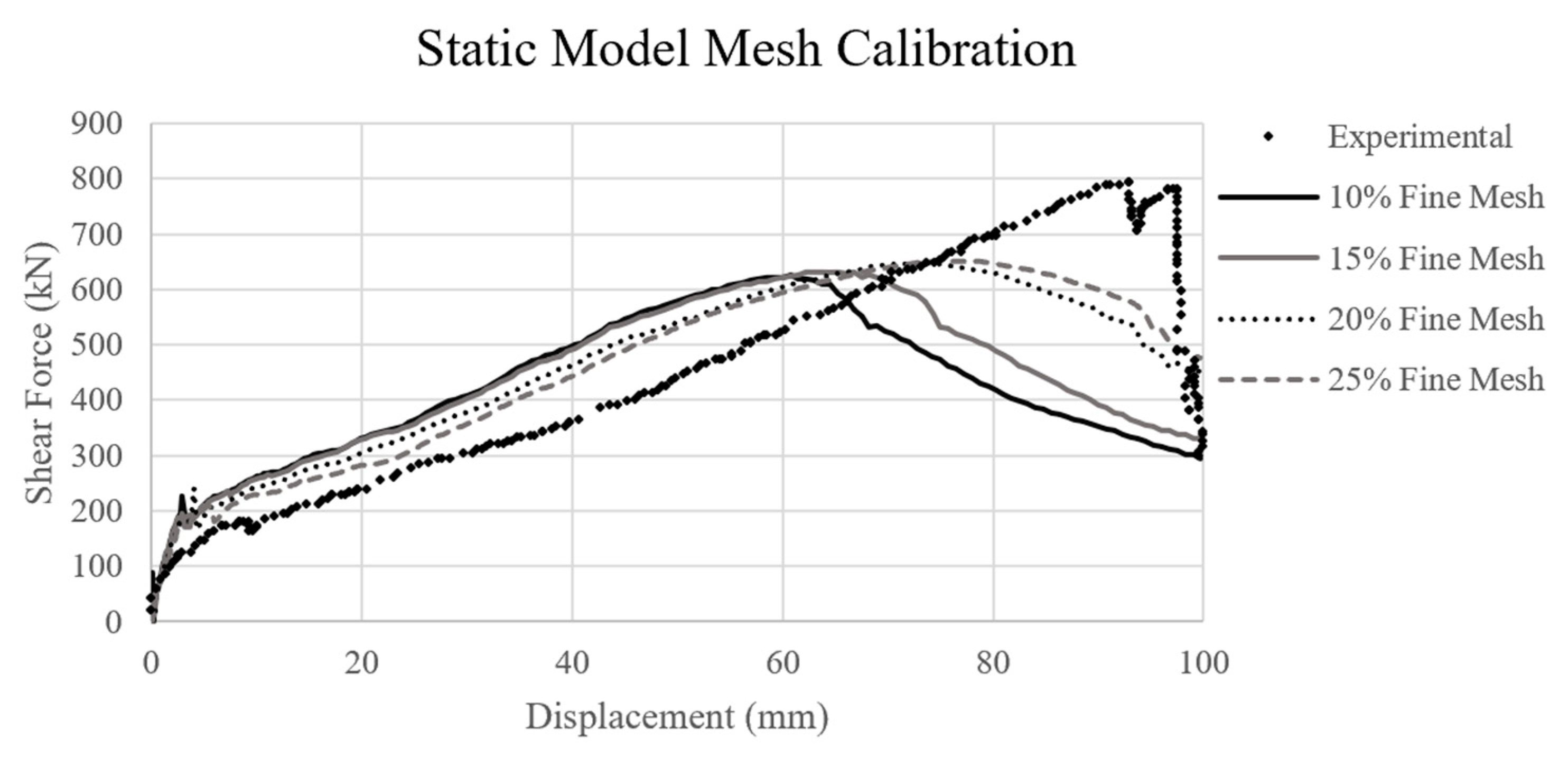
3.9. Calibration of the Model
3.10. Testing
4. Results
4.1. Bolt Diameter
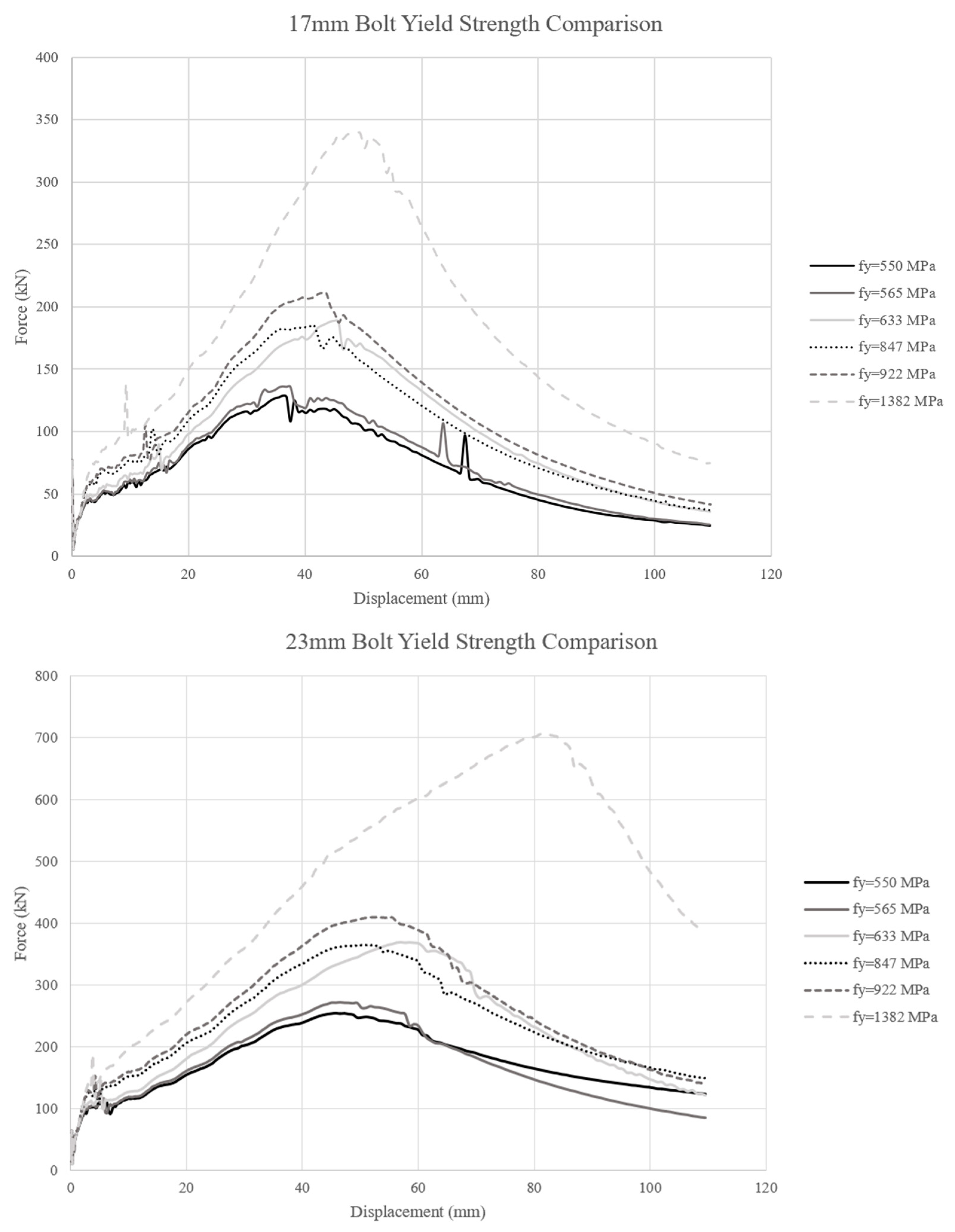
4.2. Yield and Ultimate Strength
5. Discussion
6. Limitations of the Study
7. Recommendations
- Incorporate specific bolt patterns and configurations when modelling the bolt, as the design itself is a crucial aspect of understanding how various bolts are suited for different conditions.
- Explore various surface contact conditions such as frictional slip coefficients and the physical structure between the embedded bolt and block to simulate in situ rock imperfections. Include grouting as a bolt to grout to rock surface binding medium.
- Utilise regression analysis to develop a comprehensive understanding of the relationship between bolt diameter, yield strength, loading velocity and mass of load.
- Utilise greater cross-calibration between physical testing methods such as drop testing and FEA tools. Utilise various FEA packages to conduct specialised testing methods to also ensure consistency and validity of results.
- Conduct reliable experimental testing to validate FEA modelling. Develop repeatable and reliable experimental testing methods at scales.
- Develop modelling techniques that can holistically incorporate the entire support network and be able to apply testing techniques at large scales.
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Fuller, P.G.; O’Grady, P. FLEXIBOLT Flexible Roof Bolts: A New Concept for Strata Control. In Proceedings of the 12th Conference on Ground Control in Mining, Morgantown, WV, USA, 3–5 August 1993; Available online: https://miningone.com.au/wp-content/uploads/2017/04/Flexibolt-Flexible-Roof-Bolts-A-New-Concept-for-Strata-Control-Peter-Fuller.pdf (accessed on 10 January 2023).
- Mirzaghorbanali, A.; Rasekh, H.; Aziz, N.; Yang, G.; Khaleghparast, S.; Nemcik, J. Shear strength properties of cable bolts using a new double shear instrument, experimental study, and numerical simulation. Tunn. Undergr. Space Technol. 2017, 70, 240–253. [Google Scholar] [CrossRef]
- Cai, M.; Champaigne, D.; Kaiser, P. Development of a Fully Debonded Cone Bolt for Rockburst Support; Australian Centre for Geomechanics (ACG), The University of Western Australia: Crawley WA, Australia, 2010. [Google Scholar]
- Kang, Y.; Liu, Q.; Gong, G.; Wang, H. Application of a combined support system to the weak floor reinforcement in deep underground coal mine. Int. J. Rock Mech. Min. Sci. 2014, 71, 143–150. [Google Scholar] [CrossRef]
- Tahmasebinia, F.; Zhang, C.; Canbulat, I.; Vardar, O.; Saydam, S. Numerical and analytical simulation of the structural behaviour of fully grouted cable bolts under impulsive loading. Int. J. Min. Sci. Technol. 2018, 28, 807–811. [Google Scholar] [CrossRef]
- Guo, X.H.; Wang, M.S. Analysis of efficacy of rock bolt for tunnel support structure. Rock Soil Mech. 2007, 28, 2234–2239. [Google Scholar]
- Kabwe, E.; Wang, Y. Review on Rockburst Theory and Types of Rock Support in Rockburst Prone Mines. Open J. Saf. Sci. Technol. 2015, 5, 18. [Google Scholar] [CrossRef]
- Wang, J.; Apel, D.B.; Pu, Y.; Hall, R.; Wei, C.; Sepehri, M. Numerical modeling for rockbursts: A state-of-the-art review. J. Rock Mech. Geotech. Eng. 2021, 13, 457–478. [Google Scholar] [CrossRef]
- Kaiser, P.K.; Cai, M. Design of rock support system under rockburst condition. J. Rock Mech. Geotech. Eng. 2012, 4, 215–227. [Google Scholar] [CrossRef]
- Mark, C.; Gauna, M. Evaluating the risk of coal bursts in underground coal mines. Int. J. Min. Sci. Technol. 2015, 26, 47–52. [Google Scholar] [CrossRef]
- Stacey, T.R. Review of membrane support mechanisms, loading mechanisms, desired membrance performance, and appropriate test methods. J. South. Afr. Inst. Min. Metall. 2001, 101, 343–351. [Google Scholar] [CrossRef]
- Windsor, C.R. Rock reinforcement systems. Int. J. Rock Mech. Min. Sci. 1997, 34, 919–951. [Google Scholar] [CrossRef]
- Tahmasebinia, F.; Zhang, C.; Wei, C.; Canbulat, I.; Saydam, S.; Sepasgozar, S. A new concept to design combined support under dynamic loading using numerical modelling. Tunn. Undergr. Space Technol. 2021, 117, 104132. [Google Scholar] [CrossRef]
- Güler, G.; Kuijpers, J.S.; Wojno, L.; Milev, A.; Haile, A. Determine the Effect of Repeated Dynamic Loading on the Performance of Tunnel Support systems. Safety in Mines Research Advisory Committee, GAP 616, March 2001; pp 1–107. Available online: http://researchspace.csir.co.za/dspace/handle/10204/1794 (accessed on 10 January 2023).
- Cai, M.; Champaigne, D. The Art of Rock Support in Burstprone Ground. Keynote Lecture; Rinton Press: Princeton, NJ, USA, 2009; Volume 7. [Google Scholar]
- Cai, M. Principles of rock support in burst-prone ground. Tunn. Undergr. Space Technol. 2013, 36, 46–56. [Google Scholar] [CrossRef]
- Ortlepp, W.D.; Stacey, T.R. Rockburst mechanisms in tunnels and shafts. Tunn. Undergr. Space Technol. 1994, 9, 59–65. [Google Scholar] [CrossRef]
- Brown, E. Underground Excavations in Rock; CRC Press: Boca Raton, FL, UA, 1980. [Google Scholar]
- Li, C.C.; Mikula, P.; Simser, B.; Hebblewhite, B.; Joughin, W.; Feng, X.; Xu, N. Discussions on rockburst and dynamic ground support in deep mines. J. Rock Mech. Geotech. Eng. 2019, 11, 1110–1118. [Google Scholar] [CrossRef]
- Ortlepp, W. The design of support for the containment of rockburst damage in tunnels: An engineering approach. In Rock Support in Mining and Underground Construction; Kaiser, P.K., McCreath, D.R., Eds.; Balkema: Rotterdam, The Netherlands, 1992; pp. 593–609. [Google Scholar]
- Turner, M.H.; Player, J.R. Seismicity at Big Bell Mine. Proc. Massmin 2000, 889, 791–797. [Google Scholar]
- Simser, B.; Joughin, W.; Ortlepp, W.D. The performance of Brunswick Mine’s rockburst support system during a severe seismic episode. J. South Afr. Inst. Min. Metall. 2002, 102, 217–223. [Google Scholar]
- Li, C.C.; Stjern, G.; Myrvang, A. A review on the performance of conventional and energy-absorbing rockbolts. J. Rock Mech. Geotech. Eng. 2014, 6, 315–327. [Google Scholar] [CrossRef]
- Chunlin Li, C. A new energy-absorbing bolt for rock support in high stress rock masses. Int. J. Rock Mech. Min. Sci. 2010, 47, 396–404. [Google Scholar] [CrossRef]
- Jager, A. Two new support units for the control of rockburst damage. In Proceedings of the International Symposium on Rock Support, Sudbury, ON, Canada, 16 June 1992; pp. 621–631. [Google Scholar]
- Simser, B. Geotechnical Review of the 29th July 2001 West Ore Zone Mass Blast and the Performance of the Brunswick/NTC Rockburst Support System. Technical report. 2001; 46p. [Google Scholar]
- Hutchinson, D.; Diederichs, M. Cable Bolting in Underground Mines. 406 pp. Richmond; BiTech Publishers: Richmond, BC, Canada, 1996. [Google Scholar]
- Simser, B. The weakest link-Ground support observations at some Canadian Shield hard rock mines. In Deep Mining 2007: Proceedings of the Fourth International Seminar on Deep and High Stress Mining; Potvin, Y., Ed.; Australian Centre for Geomechanics: Perth, Australia, 2007; pp. 335–348. [Google Scholar]
- Potvin, Y. Surface support in extreme ground conditions—HEA Mesh™. In Paper Presented at the SRDM 2009: Proceedings of the First International Seminar on Safe and Rapid Development Mining; Australian Centre for Geomechanics: Perth, Australia, 2009; pp. 111–119. [Google Scholar]
- Roberts, T.; Talu, S.; Wangoooo, Y. Design and Testing of High Capacity Surface Support. 2018. Available online: https://www.ausimm.com/publications/conference-proceedings/the-fourth-australasian-ground-control-in-mining-conference-ausrock/design-and-testing-of-high-capacity-surface-support/ (accessed on 10 January 2023).
- Zhou, J.; Li, X.; Mitri, H.S. Evaluation method of rockburst: State-of-the-art literature review. Tunn. Undergr. Space Technol. 2018, 81, 632–659. [Google Scholar] [CrossRef]
- Wu, Y.; Gao, F.; Chen, J.; He, J. Experimental Study on the Performance of Rock Bolts in Coal Burst-Prone Mines. Rock Mech. Rock Eng. 2019, 52, 3959–3970. [Google Scholar] [CrossRef]
- Hagan, D.M.; Milev, T.O.; Spottiswoode, A.M.; Hidyard, S.M.; Grodner, M.W.; Rorke, M.; Finnie, A.J.; Reddy, G.J.; Haile, N.; Le Bron, A.T. Simulated rockburst experiment—An overview. J. South. Afr. Inst. Min. Metall. 2001, 101, 217–222. [Google Scholar] [CrossRef]
- Heal, D.; Hudyma, M.; Potvin, Y. Assessing the in-situ performance of ground support systems subjected to dynamic loading. In Ground Support in Mining and Underground Construction; CRC Press: Boca Raton, FL, USA, 2004. [Google Scholar]
- Hadjigeorgiou, J.; Potvin, Y. A Critical Assessment of Dynamic Rock Reinforcement and Support Testing Facilities. Rock Mech. Rock Eng. 2011, 44, 565–578. [Google Scholar] [CrossRef]
- Human, J. Testing of the Saturn Prop and Buffalo Headboard at the Savuka Stope Support Test Facility. SRK Rep. 2004, 344720, 11. [Google Scholar]
- Player, J.; Villaescusa, E.; Thompson, A. Dynamic testing of friction rock stabilisers. In Proceedings of the 3rd Canada-US Rock Mechanics Symposium and 20th Canadian Rock Mechanics Symposium, Toronto, ON, Canada, May 2009; Available online: https://geogroup.utoronto.ca/wp-content/uploads/RockEng09/PDF/Session11/4027%20PAPER.pdf (accessed on 10 January 2023).
- Li, L.; Hagan, P.C.; Saydam, S.; Hebblewhite, B.; Li, Y. Parametric Study of Rockbolt Shear Behaviour by Double Shear Test. Rock Mech. Rock Eng. 2016, 49, 4787–4797. [Google Scholar] [CrossRef]
- Miranda, E.E. Deformation and fracture of concrete under uniaxial impact loading. Ph.D Thesis, University of Missouri, Rolla, MO, USA, 1972. [Google Scholar]
- Blake, W. Rock-burst mechanics. Q. Colo. Sch. Mines 1972, 1–67. Available online: https://www.osti.gov/biblio/5298057 (accessed on 10 January 2023).
- Brady, B.H.G. Boundary Element Methods for Mine Design. Ph.D. Thesis, University of London, London, UK, 1979. [Google Scholar]
- Jing, L.; Hudson, J.A. Numerical methods in rock mechanics. Int. J. Rock Mech. Min. Sci. 2002, 39, 409–427. [Google Scholar] [CrossRef]
- OneSteel. Hot Rolled and Structural Steel Products; HRSSP: Sydney, Australia, 2014. [Google Scholar]
- Zafar, A.; Andrawes, B. Incremental dynamic analysis of concrete moment resisting frames reinforced with shape memory composite bars. Smart Mater. Struct. 2012, 21, 025013. [Google Scholar] [CrossRef]
- Arasaratnam, P.; Sivakumaran, K.S.; Tait, M.J. True Stress-True Strain Models for Structural Steel Elements. ISRN Civ. Eng. 2011, 2011, 1–11. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Hauge, M.; Ødegård, J.; Thaulow, C. Determining material true stress–strain curve from tensile specimens with rectangular cross-section. Int. J. Solids Struct. 1999, 36, 3497–3516. [Google Scholar] [CrossRef]
- Ardalany, M.; Deam, B.; Fragiacomo, M. Experimental results of fracture energy and fracture toughness of Radiata Pine laminated veneer lumber (LVL) in mode I (opening). Mater. Struct. 2012, 45, 1189–1205. [Google Scholar] [CrossRef]
- Hajikarimi, P.; Moghadas Nejad, F. Chapter 7—Application of viscoelasticity for experimental tests. In Applications of Viscoelasticity; Hajikarimi, P., Moghadas Nejad, F., Eds.; Elsevier: Amsterdam, The Netherlands, 2021; pp. 141–180. [Google Scholar] [CrossRef]
- AS3600:2018; Concrete Structures. Standards Australia Office: Sydney, Australia, 2018.
- Sumer, Y.; Aktas, M. Defining parameters for cocnrete damage plasticity model. Chall. J. Struct. Mech. 2015, 1, 149–155. [Google Scholar] [CrossRef]
- Xiao, Y.; Chen, Z.; Zhou, J.; Leng, Y.; Xia, R. Concrete plastic-damage factor for finite element analysis: Concept, simulation and experiment. Adv. Mech. Eng. 2017, 9, 1–10. [Google Scholar] [CrossRef]
- ABAQUSinc. ABAQUS Analysis User’s Manuals. 2009. (Version 6.14). from Dassault Systemes Simulia. Available online: http://130.149.89.49:2080/v6.14/books/usb/default.htm (accessed on 10 January 2023).
- Aziz, N.; Anzanpour, S.; Khaleghparast, S.; Mirzaghorbanali, A.; Rastegarmanesh, A.; Si, G.; Oh, J.; Hagan, P.; Li, X. Development of a Numerical Modelling Approach to Better Understand the Effect of Cable Bolt Performance on Roof Failure Mechanisms in Varying Rock Mass Conditions; ACARP Australia: Brisbane City, Australia, 2021. [Google Scholar]
- He, L.; An, X.M.; Zhao, Z.Y. Fully Grouted Rock Bolts: An Analytical Investigation. Rock Mech. Rock Eng. 2015, 48, 1181–1196. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Numerical Method | Advantages | Disadvantages |
|---|---|---|
| Continuum Method (BEM) | Capability of 3D modelling Allow the rapid assessment of stress concentration, deformation and designs | Normally elastic analysis only Calculation time increases exponentially with number of elements |
| Continuum Method (FEM, FDM) | Capability of 3D modelling Easily handle material heterogeneity and geometric nonlinearity Simulate complex behaviour of rock/rock masses with various constitutive models Allows dynamic loading | Input limitations, e.g., some critical input parameters are difficult to determine Interfaces can model simple structures, but are not suitable for highly jointed block media Rich experience in using numerical analysis is essential Calculation time increases exponentially with number of elements |
| Discontinuum Method (DEM) | Capability of 3D modelling Easy to model jointed rock systems Able to model complex behaviour of rock/rock masses with various constitutive models Allows the large deformation and detachment of blocks Allows dynamic loading | Limited data on joint properties are available and the calibration of parameters might be needed Rich experience in using numerical analysis is essential 2D modelling is usually used due to the great calculation cost of 3D models |
| Hybrid Method (FEM/DEM) | Able to model the extension of existing fractures and creation of new fractures in intact rocks 3D modelling is possible Allows dynamic loading | Few data are available for contact properties and fracture mechanics properties The calibration of parameters is needed Extremely long run times will require the use of parallel processing for large models 2D modelling is usually used |
| Jennmar Bolt Type | Bolt Diameter (mm) | Typical Yield Strength (kN) | Typical Ultimate Tensile Strength (kN) |
|---|---|---|---|
| 17.8 Yield Lok Bolt | 18 | 147 | 196 |
| J-Tech® 20mm Bolt | 20 | 170 | 200 |
| Yield Lok® Bolt 23mm | 23 | 245 | 328 |
| J-Tech® 25mm | 24 | 245 | 294 |
| 63T Sumo Cable Bolt | 28 | 560 | 630 |
| 70T 12 Wire Sumo Cable Bolt | 31 | 640 | 705 |
| Strand Diameter (mm) | Typical Strand Yield Strength (kN) | Typical Breaking Load (kN) | Elongation at Strand Failure | |
|---|---|---|---|---|
| ID Sumo | 28 | 560 | 630 | 5–7% |
| Density (kg/m3) | Elastic | Shear Damage | ||||
|---|---|---|---|---|---|---|
| Elastic Modulus (MPa) | Poisson’s Ratio | Fracture Strain | Shear Stress Ratio | Strain Rate | ||
| Value | 7800 | 200,000 | 0.3 | 0.13 | 0.7 | 0.0001 |
| Density (kg/m3) | Elastic | ||
|---|---|---|---|
| Elastic Modulus (MPa) | Poisson’s Ratio | ||
| Value | 2400 | 33,346 | 0.2 |
| Fine Mesh Seed Size (%) | Computational Time (s) |
|---|---|
| 10 | 1746 |
| 15 | 1025 |
| 20 | 618 |
| 25 | 431 |
| Part | Coarse Mesh Seed Size (mm) | Fine Mesh Seed Size (mm) |
|---|---|---|
| Bolt | 11.2 | 5.6 |
| Box | 30 | 5.6 |
| Master | Slave | Constraint | Sliding Formulation |
|---|---|---|---|
| Concrete | Steel | Penalty Contact | Finite Sliding |
| Tangential Behaviour | Normal Behaviour | ||
| Friction Coefficient | Pressure Overclose | ||
| 0.5 | Hard Contact | ||
| Region | Type | Frequency/Interval | Factor | Target Time Increment |
|---|---|---|---|---|
| Whole Model | Target Time Inc. | Beginning of Step | None | 1 × 10−5 |
| Bolt Diameter (mm) | Steel Yield/Ultimate fy/fu (MPA) |
|---|---|
| 18 | 550/650 |
| 20 | 565/685 |
| 23 | 633/844 |
| 25 | 847/934 |
| 28 | 922/1031 |
| 31 | 1382/1553 |
| Maximum Shear Load (kN) | ||||||
|---|---|---|---|---|---|---|
| Bolt Diameter (mm) | fy = 500 Mpa | fy = 565 Mpa | fy = 633 Mpa | fy = 847 Mpa | fy = 922 Mpa | fy = 1382 Mpa |
| 18 | 129.0 | 136.4 | 189.0 | 185.0 | 211.3 | 339.3 |
| 20 | 186.4 | 197.5 | 269.4 | 270.5 | 302.0 | 492.5 |
| 23 | 254.8 | 272.3 | 369.2 | 364.5 | 409.8 | 705.7 |
| 25 | 305.1 | 325.8 | 443.1 | 441.3 | 497.8 | 848.0 |
| 28 | 394.8 | 423.0 | 582.6 | 575.4 | 647.0 | 1084.5 |
| 31 | 498.1 | 535.5 | 721.3 | 716.6 | 818.4 | 1301.5 |
| Maximum Displacement at Failure (mm) | ||||||
|---|---|---|---|---|---|---|
| Bolt Diameter (mm) | fy = 500 Mpa | fy = 565 Mpa | fy = 633 Mpa | fy = 847 Mpa | fy = 922 Mpa | fy = 1382 Mpa |
| 18 | 36.2 | 36.9 | 45.1 | 41.6 | 43.0 | 49.5 |
| 20 | 43.6 | 44.3 | 51.0 | 45.1 | 45.8 | 60.7 |
| 23 | 45.8 | 46.5 | 57.0 | 51.0 | 52.5 | 81.0 |
| 25 | 51.0 | 53.3 | 63.8 | 55.5 | 60.0 | 91.5 |
| 28 | 57.8 | 61.5 | 76.5 | 68.2 | 72.0 | 109.5 |
| 31 | 65.2 | 70.5 | 87.0 | 76.5 | 85.5 | 120.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tahmasebinia, F.; Yang, A.; Feghali, P.; Skrzypkowski, K. Structural Evaluation of Cable Bolts under Static Loading. Appl. Sci. 2023, 13, 1326. https://doi.org/10.3390/app13031326
Tahmasebinia F, Yang A, Feghali P, Skrzypkowski K. Structural Evaluation of Cable Bolts under Static Loading. Applied Sciences. 2023; 13(3):1326. https://doi.org/10.3390/app13031326
Chicago/Turabian StyleTahmasebinia, Faham, Adam Yang, Patrick Feghali, and Krzysztof Skrzypkowski. 2023. "Structural Evaluation of Cable Bolts under Static Loading" Applied Sciences 13, no. 3: 1326. https://doi.org/10.3390/app13031326
APA StyleTahmasebinia, F., Yang, A., Feghali, P., & Skrzypkowski, K. (2023). Structural Evaluation of Cable Bolts under Static Loading. Applied Sciences, 13(3), 1326. https://doi.org/10.3390/app13031326