

Scripts to Insert Cohesive Elements at the Interfaces between Matrix and Precipitates with Irregular Shapes in Representative Volume Elements in ABAQUS


Abstract
:1. Introduction
2. Background: Steps of RVE Simulation for Fracture Analysis at the Microscale
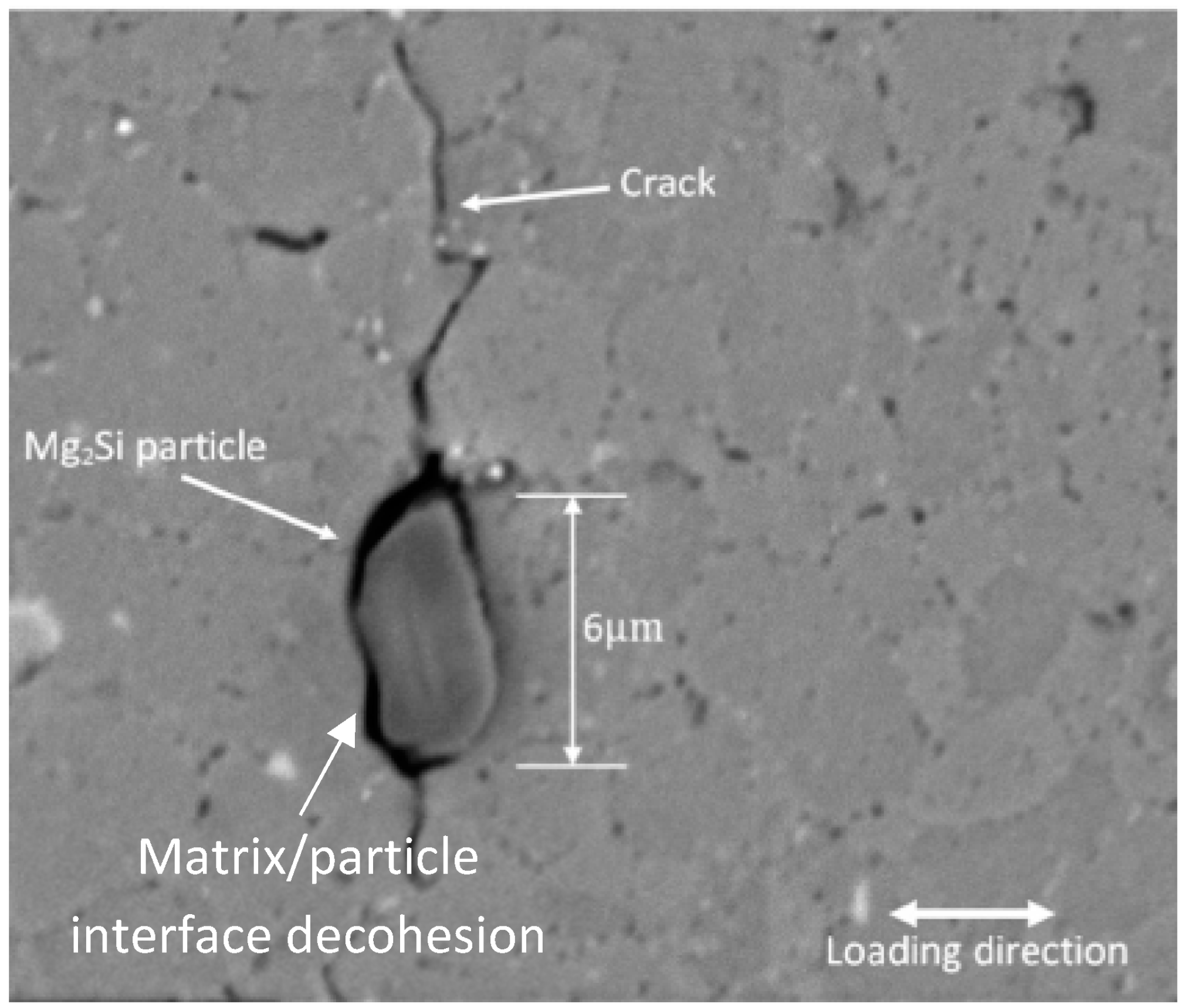
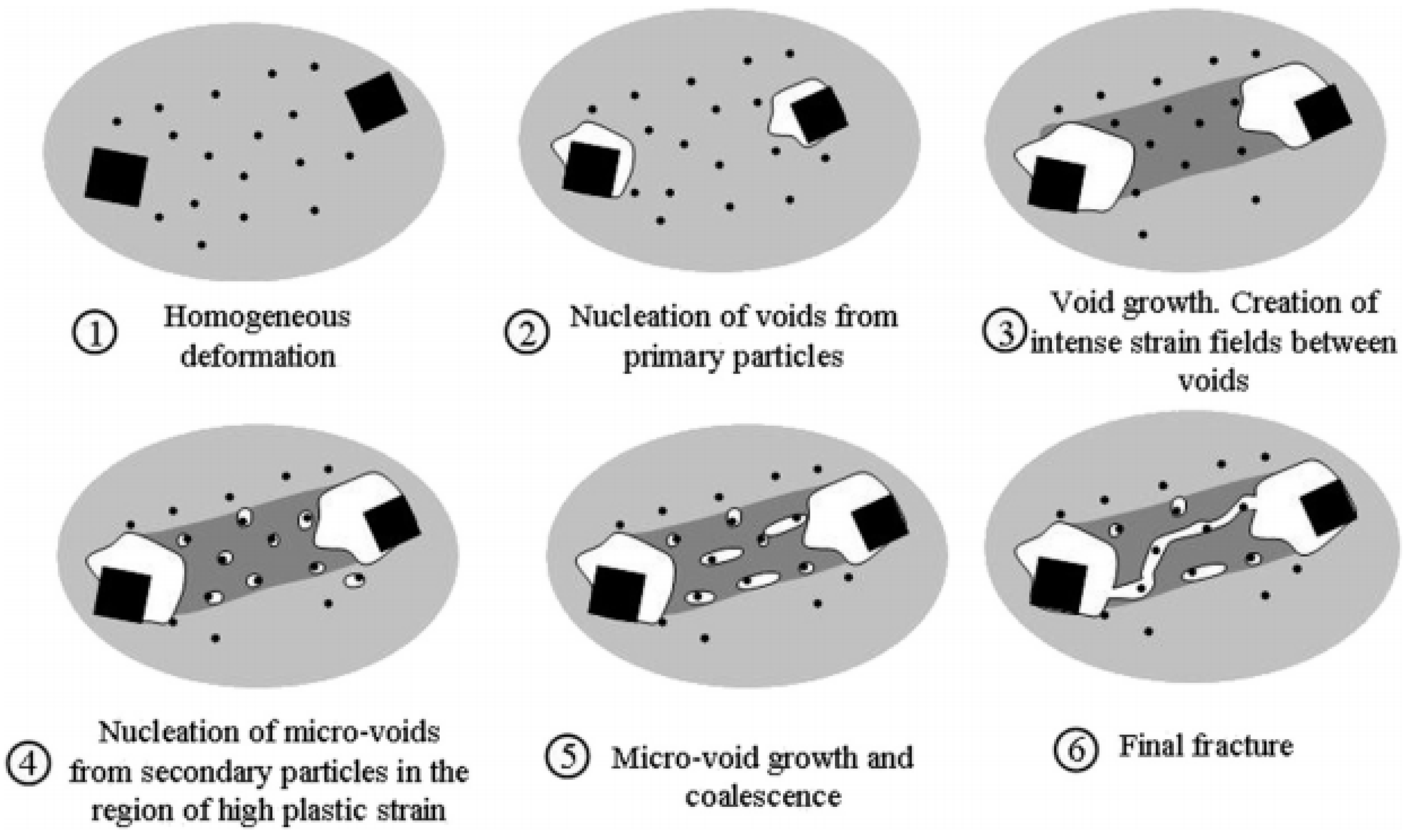
2.1. Decohesion at the Interface between Matrix and Particles
2.2. Representative Volume Element (RVE)-Based Simulations
2.3. Determination of Cohesion Properties
3. OOF2: 2D Real Microstructure RVE Generation
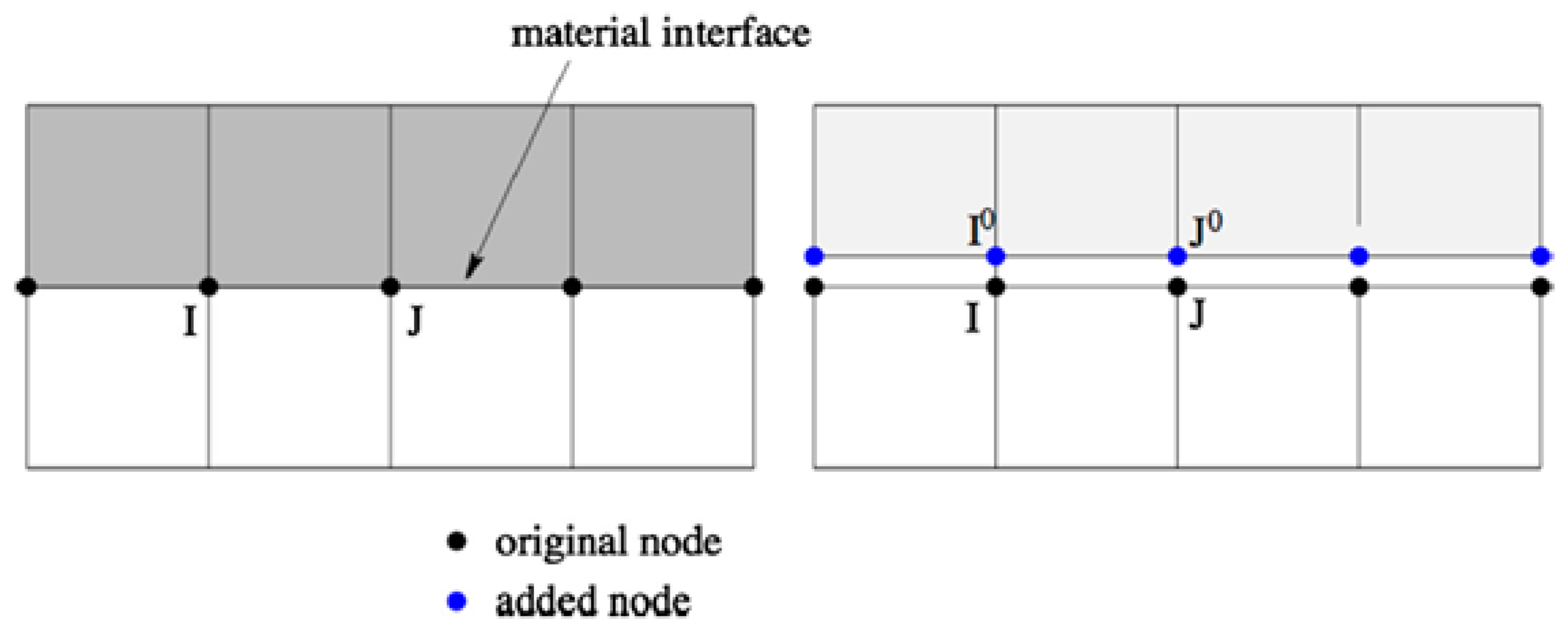
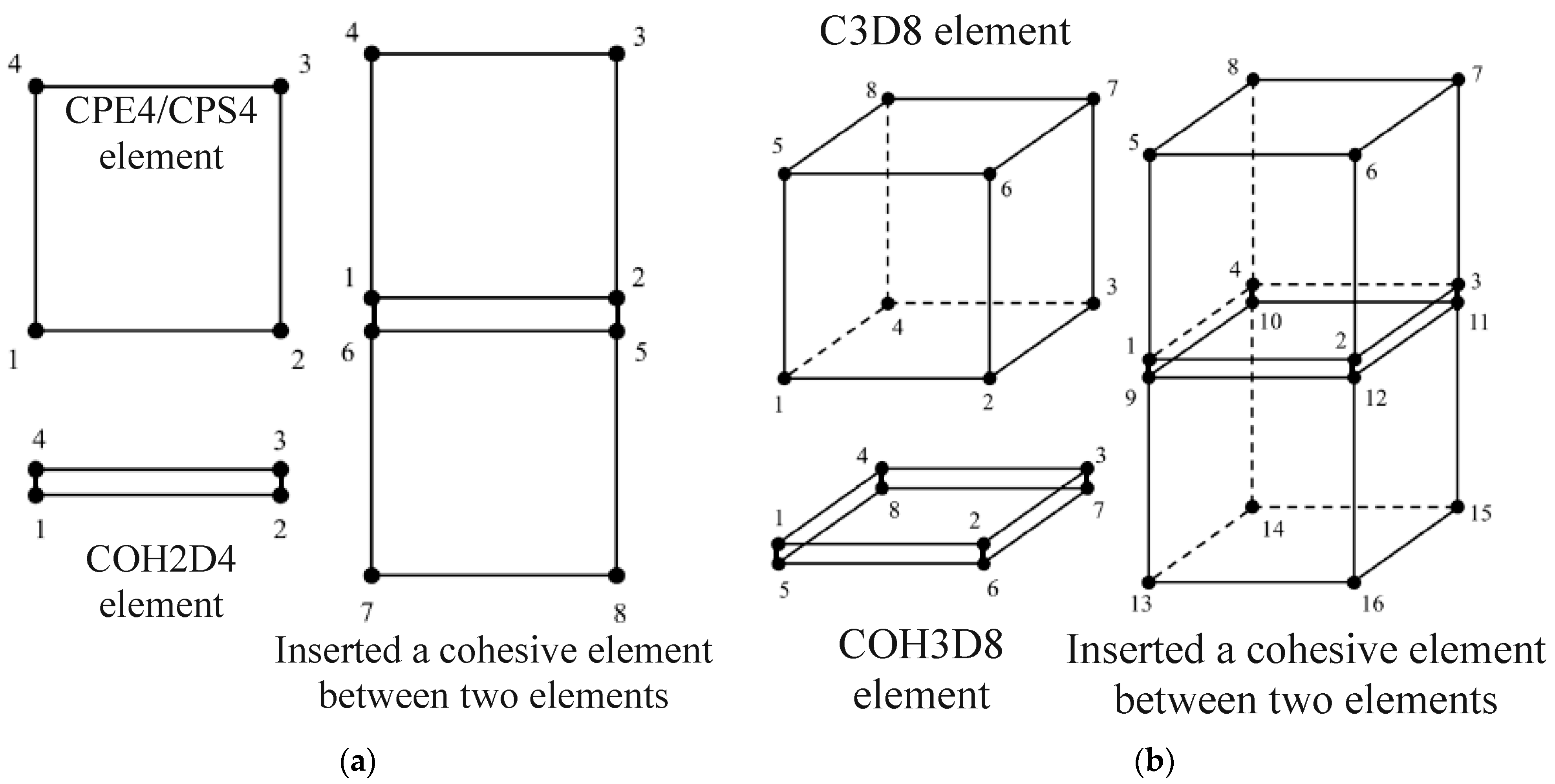
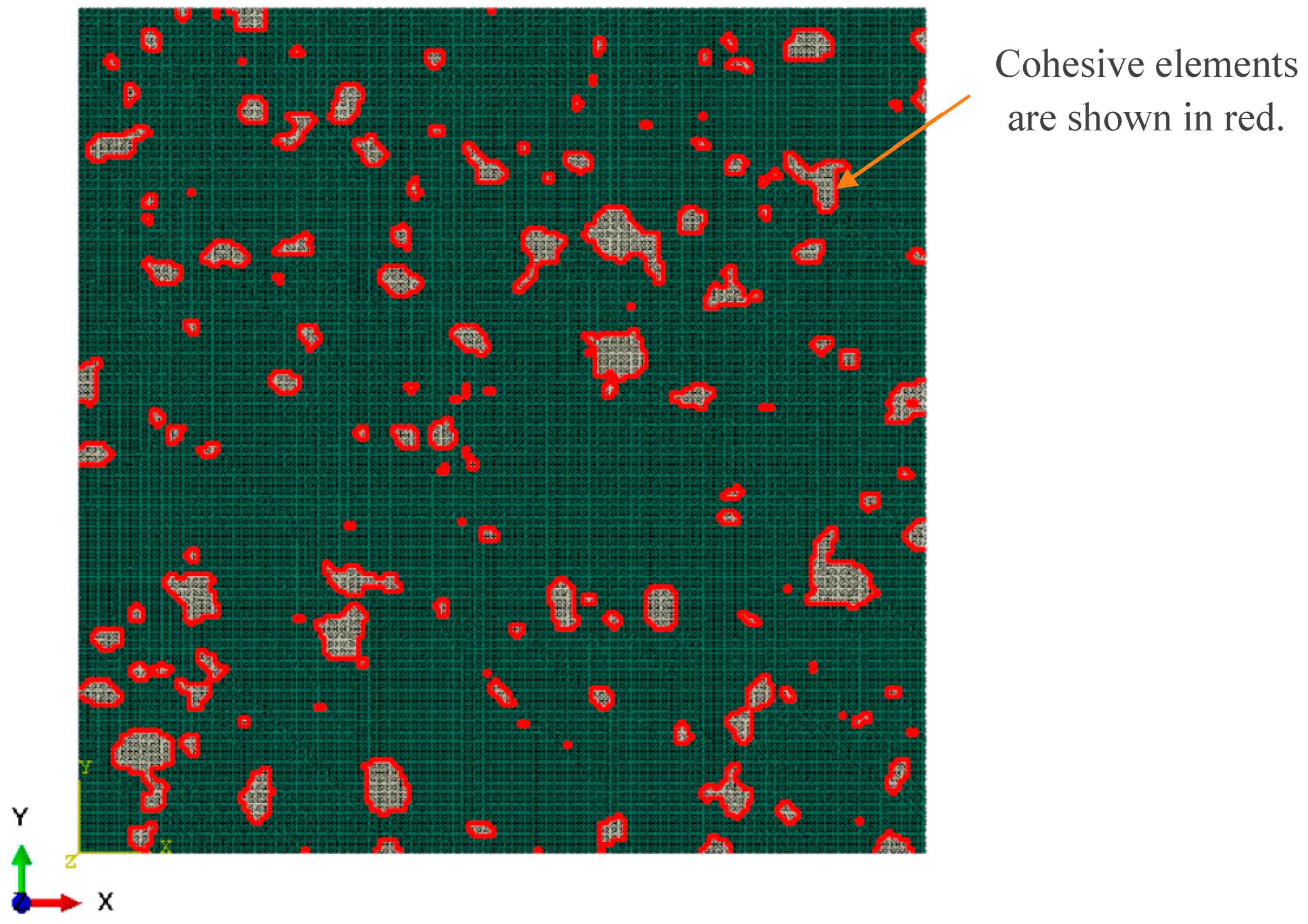
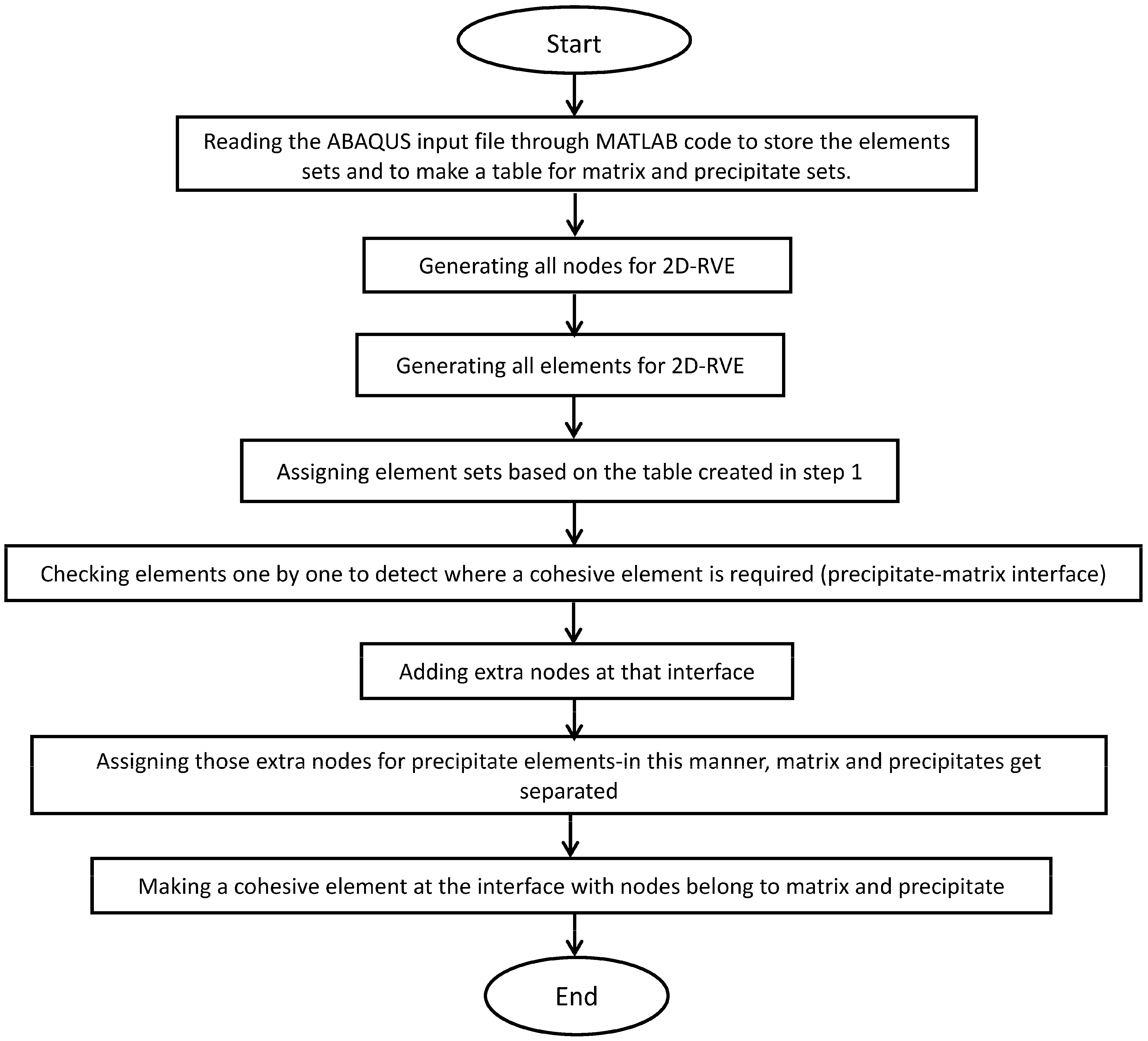
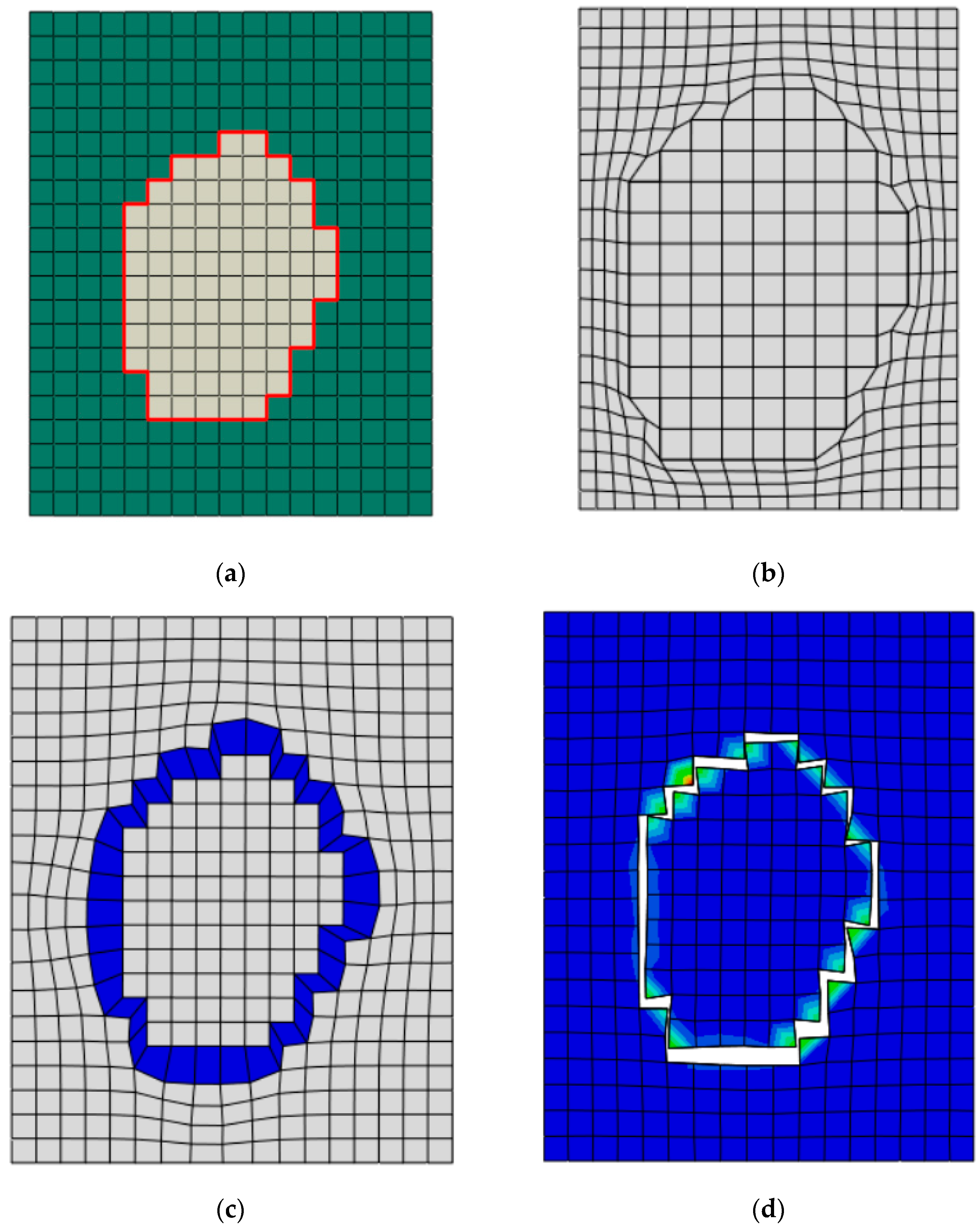
4. MATLAB Script: Inserting Cohesive Elements at the Matrix/Precipitate Interface
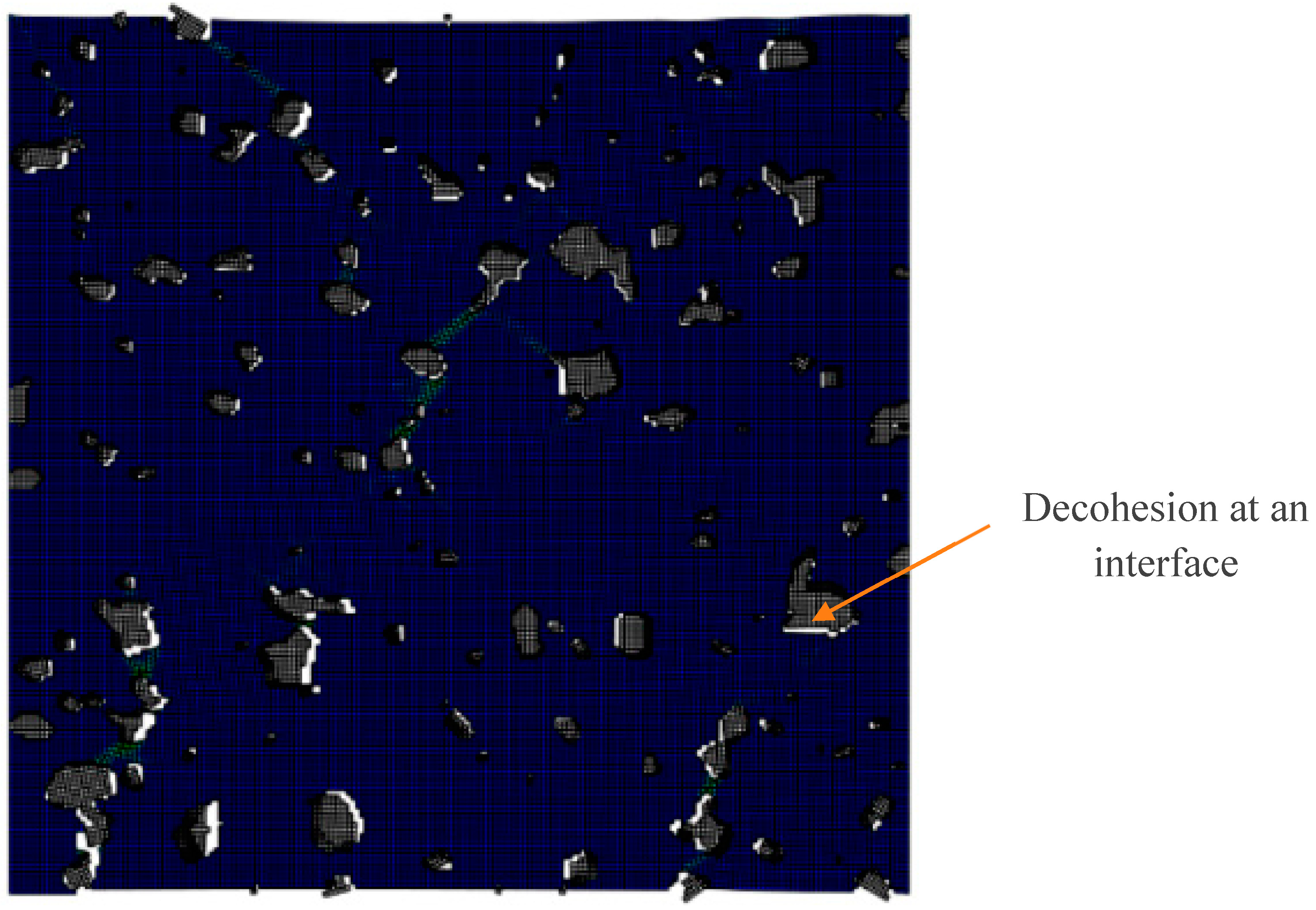
5. Response: Decohesion at the Interface between Matrix and Precipitates in the 2D RVE
6. Brief Discussion: Insertion of Cohesive Elements at the Interfaces between Matrix/Precipitates
7. Summary
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Available online: https://github.com/mmshahzamanian/2D_Cohesive-element-insertion-into-a-2D_RVE- (accessed on 13 March 2022).
- Available online: https://github.com/mmshahzamanian/3D_Cohesive-element-insertion-into-a-2D_RVE (accessed on 13 March 2022).
- Shahzamanian, M.; Thomsen, C.; Partovi, A.; Xu, Z.; Wu, P. The effect of superimposed hydrostatic pressure on shear decohesion in round bar tensile specimens. Int. J. Fract. 2022, 233, 179–194. [Google Scholar] [CrossRef]
- Dipasquale, D.; Sarego, G.; Prapamonthon, P.; Yooyen, S.; Shojaei, A. A Stress Tensor-based Failure Criterion for Ordinary State-based Peridynamic Models. J. Appl. Comput. Mech. 2022, 8, 617–628. [Google Scholar]
- Shahzamanian, M.; Kainat, M.; Yoosef-Ghodsi, N.; Adeeb, S. Systematic literature review of the application of extended finite element method in failure prediction of pipelines. J. Pipeline Sci. Eng. 2021, 1, 241–251. [Google Scholar] [CrossRef]
- Vernerey, F.J.; Liu, W.K.; Moran, B.; Olson, G. A micromorphic model for the multiple scale failure of heterogeneous materials. J. Mech. Phys. Solids 2008, 56, 1320–1347. [Google Scholar] [CrossRef]
- Bindumadhavan, P.; Wah, H.K.; Prabhakar, O. Assessment of particle–matrix debonding in particulate metal matrix composites using ultrasonic velocity measurements. Mater. Sci. Eng. A 2002, 323, 42–51. [Google Scholar] [CrossRef]
- Tagliavia, G.; Porfiri, M.; Gupta, N. Analysis of hollow inclusion–matrix debonding in particulate composites. Int. J. Solids Struct. 2010, 47, 2164–2177. [Google Scholar] [CrossRef]
- He, C.; Liu, Y.; Dong, J.; Wang, Q.; Wagner, D.; Bathias, C. Fatigue crack initiation behaviors throughout friction stir welded joints in AA7075-T6 in ultrasonic fatigue. Int. J. Fatigue 2015, 81, 171–178. [Google Scholar] [CrossRef]
- Singh, S.S.; Guo, E.; Xie, H.; Chawla, N. Mechanical properties of intermetallic inclusions in Al 7075 alloys by micropillar compression. Intermetallics 2015, 62, 69–75. [Google Scholar] [CrossRef]
- Hill, R. Elastic properties of reinforced solids: Some theoretical principles. J. Mech. Phys. Solids 1963, 11, 357–372. [Google Scholar] [CrossRef]
- Hashin, Z.; Shtrikman, S. A variational approach to the theory of the elastic behaviour of multiphase materials. J. Mech. Phys. Solids 1963, 11, 127–140. [Google Scholar] [CrossRef]
- Willis, J.R. Variational and related methods for the overall properties of composites. In Advances in Applied Mechanics; Elsevier: Amsterdam, The Netherlands, 1981; pp. 1–78. [Google Scholar]
- Qing, H. 2D micromechanical analysis of SiC/Al metal matrix composites under tensile, shear and combined tensile/shear loads. Mater. Des. 2013, 51, 438–447. [Google Scholar] [CrossRef]
- Geers, M.G.; Kouznetsova, V.G.; Brekelmans, W. Multi-scale computational homogenization: Trends and challenges. J. Comput. Appl. Math. 2010, 234, 2175–2182. [Google Scholar] [CrossRef]
- Mohammadpour, E.; Awang, M.; Kakooei, S.; Akil, H.M. Modeling the tensile stress–strain response of carbon nanotube/polypropylene nanocomposites using nonlinear representative volume element. Mater. Des. 2014, 58, 36–42. [Google Scholar] [CrossRef]
- Chan, L.; Lu, X.; Yu, K. Multiscale approach with RSM for stress–strain behaviour prediction of micro-void-considered metal alloy. Mater. Des. 2015, 83, 129–137. [Google Scholar] [CrossRef]
- Shahzamanian, M.; Tadepalli, T.; Rajendran, A.; Hodo, W.D.; Mohan, R.; Valisetty, R.; Chung, P.; Ramsey, J. Representative volume element based modeling of cementitious materials. J. Eng. Mater. Technol. 2014, 136, 011007. [Google Scholar] [CrossRef]
- Nemet-Nasser, S.; Hori, M. Micromechanics: Overall Properties of Heterogeneous Materials; Elsevier: Amsterdam, The Netherlands, 1999. [Google Scholar]
- Sab, K. On the homogenization and the simulation of random materials. Eur. J. Mech. A Solids 1992, 11, 585–607. [Google Scholar]
- Shahzamanian, M.; Akhtar, S.; Arif, A.; Basirun, W.; Al-Athel, K.; Schneider, M.; Shakelly, N.; Hakeem, A.S.; Abubakar, A.A.; Wu, P. Thermo-mechanical properties prediction of Ni-reinforced Al2O3 composites using micro-mechanics based representative volume elements. Sci. Rep. 2022, 12, 11076. [Google Scholar] [CrossRef]
- Bahrami-Novin, N.; Mahdavi, E.; Shaban, M.; Mazaheri, H. Multi-objective optimization of tensile properties of the corrugated composite sheet. J. Compos. Mater. 2022, 56, 811–821. [Google Scholar] [CrossRef]
- Talaie, P.; Shaban, M.; Khoshlesan, S. Flexural analysis of second-order corrugated composite cores: Experimental, numerical, and theoretical studies. J. Strain Anal. Eng. Design 2023, 58, 03093247231152569. [Google Scholar] [CrossRef]
- Ramazani, A.; Schwedt, A.; Aretz, A.; Prahl, U.; Bleck, W. Characterization and modelling of failure initiation in DP steel. Comput. Mater. Sci. 2013, 75, 35–44. [Google Scholar] [CrossRef]
- Grilli, N.; Tarleton, E.; Cocks, A.C. Neper2CAE and PyCiGen: Scripts to generate polycrystals and interface elements in Abaqus. SoftwareX 2021, 13, 100651. [Google Scholar] [CrossRef]
- Bentz, D.P.; Bentz, D.P. CEMHYD3D: A Three-Dimensional Cement Hydration and Microstructure Development Modelling Package, 2nd ed.; US Department of Commerce, National Institute of Standards and Technology: Gaithersburg, MD, USA, 2000.
- Groeber, M.A.; Jackson, M.A. DREAM. 3D: A digital representation environment for the analysis of microstructure in 3D. Integr. Mater. Manuf. Innov. 2014, 3, 56–72. [Google Scholar] [CrossRef]
- Edrees, S.A.; Rafea, A.; Fathy, I.; Yahia, M. NEPER: A multiple strategy wheat expert system. Comput. Electron. Agric. 2003, 40, 27–43. [Google Scholar] [CrossRef]
- Reid, A.C.; Lua, R.C.; García, R.E.; Coffman, V.R.; Langer, S.A. Modelling microstructures with OOF2. Int. J. Mater. Prod. Technol. 2009, 35, 361–373. [Google Scholar] [CrossRef]
- Shahzamanian, M. Anisotropic Gurson-Tvergaard-Needleman plasticity and damage model for finite element analysis of elastic-plastic problems. Int. J. Numer. Methods Eng. 2018, 115, 1527–1551. [Google Scholar] [CrossRef]
- Shahzamanian, M.; Wu, P. Study of forming limit diagram (FLD) prediction of anisotropic sheet metals using Gurson model in MK method. Int. J. Mater. Form. 2021, 14, 1031–1041. [Google Scholar] [CrossRef]
- Babout, L.; Brechet, Y.; Maire, E.; Fougeres, R. On the competition between particle fracture and particle decohesion in metal matrix composites. Acta Mater. 2004, 52, 4517–4525. [Google Scholar] [CrossRef]
- Barenblatt, G.I. The mathematical theory of equilibrium cracks in brittle fracture. In Advances in Applied Mechanics; Elsevier: Amsterdam, The Netherlands, 1962; pp. 55–129. [Google Scholar]
- Avramovic-Cingara, G.; Ososkov, Y.; Jain, M.; Wilkinson, D. Effect of martensite distribution on damage behaviour in DP600 dual phase steels. Mater. Sci. Eng. A 2009, 516, 7–16. [Google Scholar] [CrossRef]
- Zhao, D.; Tuler, F.; Lloyd, D. Fracture at elevated temperatures in a particle reinforced composite. Acta Metall. Mater. 1994, 42, 2525–2533. [Google Scholar] [CrossRef]
- Charles, Y.; Estevez, R.; Bréchet, Y.; Maire, E. Modelling the competition between interface debonding and particle fracture using a plastic strain dependent cohesive zone. Eng. Fract. Mech. 2010, 77, 705–718. [Google Scholar] [CrossRef]
- Babout, L.; Maire, E.; Buffière, J.-Y.; Fougeres, R. Characterization by X-ray computed tomography of decohesion, porosity growth and coalescence in model metal matrix composites. Acta Mater. 2001, 49, 2055–2063. [Google Scholar] [CrossRef]
- Pathak, S.; Kalidindi, S.R. Spherical nanoindentation stress–strain curves. Mater. Sci. Eng. R Rep. 2015, 91, 1–36. [Google Scholar] [CrossRef]
- Babout, L.; Maire, E.; Fougeres, R. Damage initiation in model metallic materials: X-ray tomography and modelling. Acta Mater. 2004, 52, 2475–2487. [Google Scholar] [CrossRef]
- Available online: https://www.ctcms.nist.gov/oof/oof2/ (accessed on 13 March 2022).
- Abdelaty, I. Elevated Temperature Deformation and Forming Behaviour of AA7075 Aluminum Sheet Material. Ph.D. Thesis, McMaster University, Hamilton, ON, Canada, 2019. [Google Scholar]
- Hu, X.; Jain, M.; Wilkinson, D.; Mishra, R. Microstructure-based finite element analysis of strain localization behavior in AA5754 aluminum sheet. Acta Mater. 2008, 56, 3187–3201. [Google Scholar] [CrossRef]
- Nguyen, V.P. An open source program to generate zero-thickness cohesive interface elements. Adv. Eng. Softw. 2014, 74, 27–39. [Google Scholar] [CrossRef]
- Truster, T.J. DEIP, discontinuous element insertion Program—Mesh generation for interfacial finite element modeling. SoftwareX 2018, 7, 162–170. [Google Scholar] [CrossRef]
- Tan, H.; Liu, C.; Huang, Y.; Geubelle, P. The cohesive law for the particle/matrix interfaces in high explosives. J. Mech. Phys. Solids 2005, 53, 1892–1917. [Google Scholar] [CrossRef]
- Needleman, A. A continuum model for void nucleation by inclusion debonding. J. Appl. Mech. 1987, 54, 525–531. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Permanent link to code | https://github.com/mmshahzamanian/2D_Cohesive-element-insertion-into-a-2D_RVE- |
| Access date | 13 March 2022 |
| Software code languages | MATLAB |
| Compilation requirements | MATLAB R2018a |
| Link to developer documentation | https://github.com/mmshahzamanian/2D_Cohesive-element-insertion-into-a-2D_RVE- |
| Support email for questions | mmshahzamanian@gmail.com |
| Permanent link to code | https://github.com/mmshahzamanian/3D_Cohesive-element-insertion-into-a-2D_RVE |
| Access date | 13 March 2022 |
| Software code languages | MATLAB |
| Compilation requirements | MATLAB R2018a |
| Link to developer documentation | https://github.com/mmshahzamanian/3D_Cohesive-element-insertion-into-a-2D_RVE |
| Support email for questions | mmshahzamanian@gmail.com |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shahzamanian, M.; Xu, Z.; Wu, P. Scripts to Insert Cohesive Elements at the Interfaces between Matrix and Precipitates with Irregular Shapes in Representative Volume Elements in ABAQUS. Appl. Sci. 2023, 13, 12281. https://doi.org/10.3390/app132212281
Shahzamanian M, Xu Z, Wu P. Scripts to Insert Cohesive Elements at the Interfaces between Matrix and Precipitates with Irregular Shapes in Representative Volume Elements in ABAQUS. Applied Sciences. 2023; 13(22):12281. https://doi.org/10.3390/app132212281
Chicago/Turabian StyleShahzamanian, Mohammadmehdi, Zhutian Xu, and Peidong Wu. 2023. "Scripts to Insert Cohesive Elements at the Interfaces between Matrix and Precipitates with Irregular Shapes in Representative Volume Elements in ABAQUS" Applied Sciences 13, no. 22: 12281. https://doi.org/10.3390/app132212281
APA StyleShahzamanian, M., Xu, Z., & Wu, P. (2023). Scripts to Insert Cohesive Elements at the Interfaces between Matrix and Precipitates with Irregular Shapes in Representative Volume Elements in ABAQUS. Applied Sciences, 13(22), 12281. https://doi.org/10.3390/app132212281