



Multi-Output Regression Indoor Localization Algorithm Based on Hybrid Grey Wolf Particle Swarm Optimization

Abstract
:1. Introduction
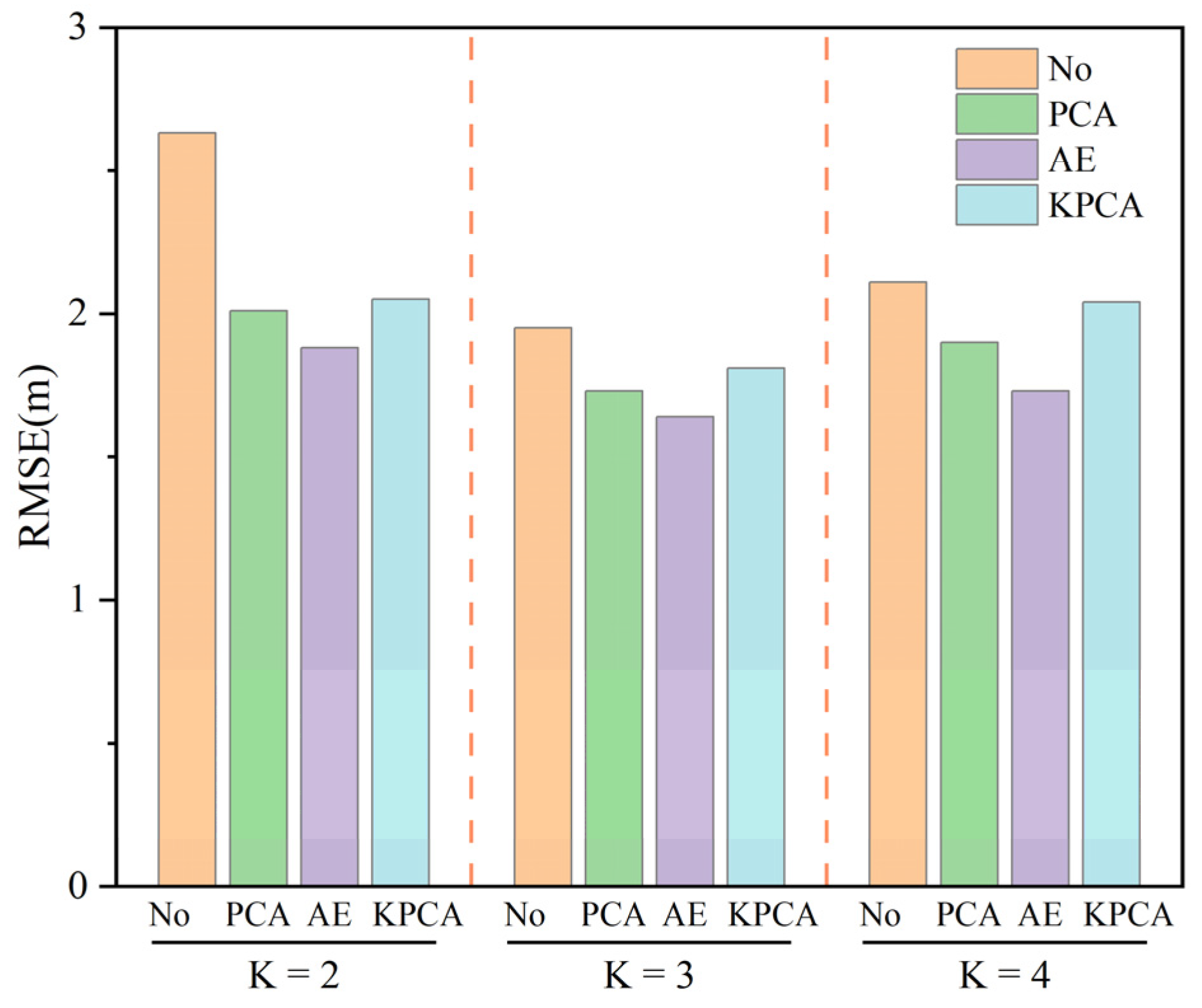
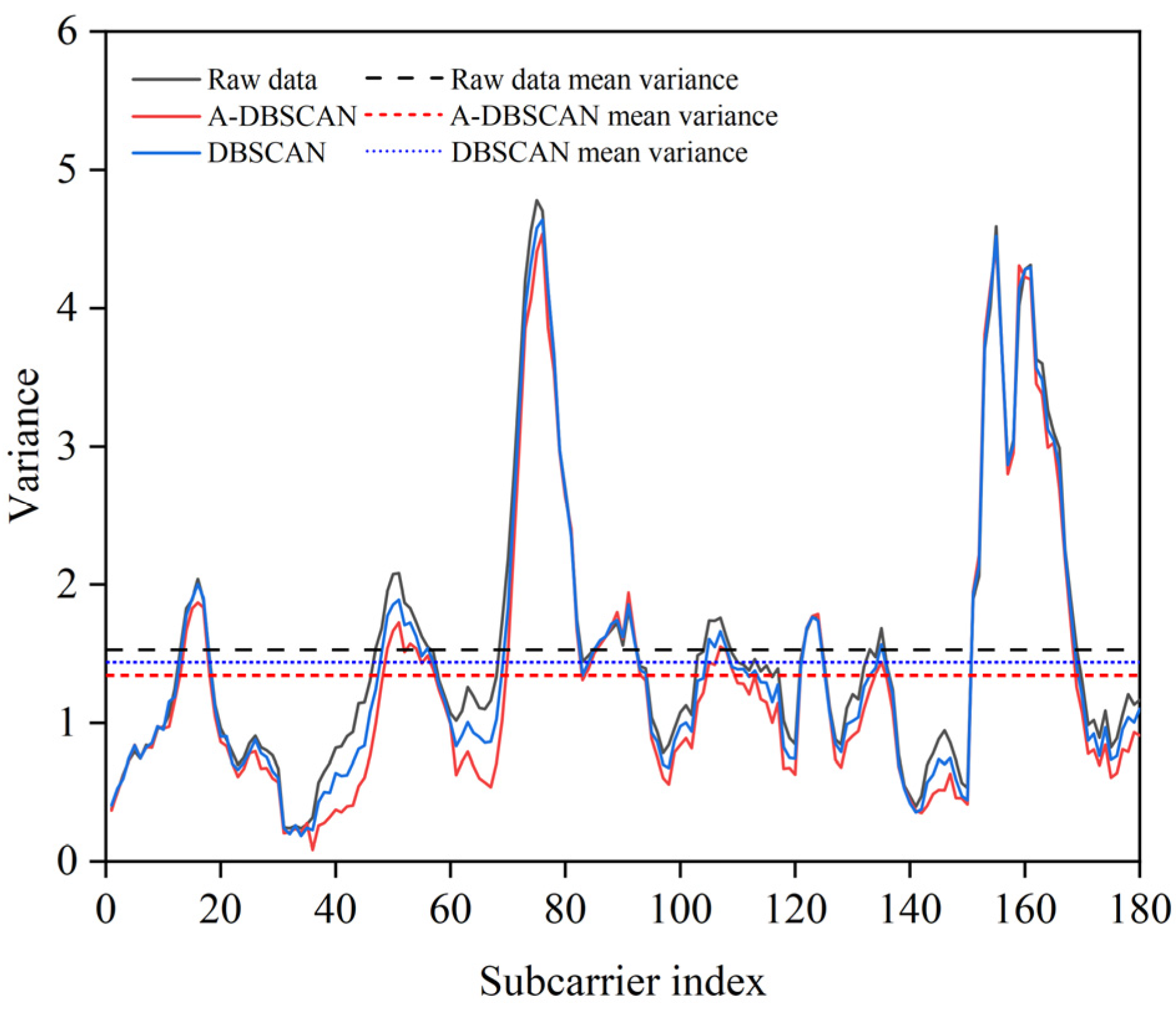
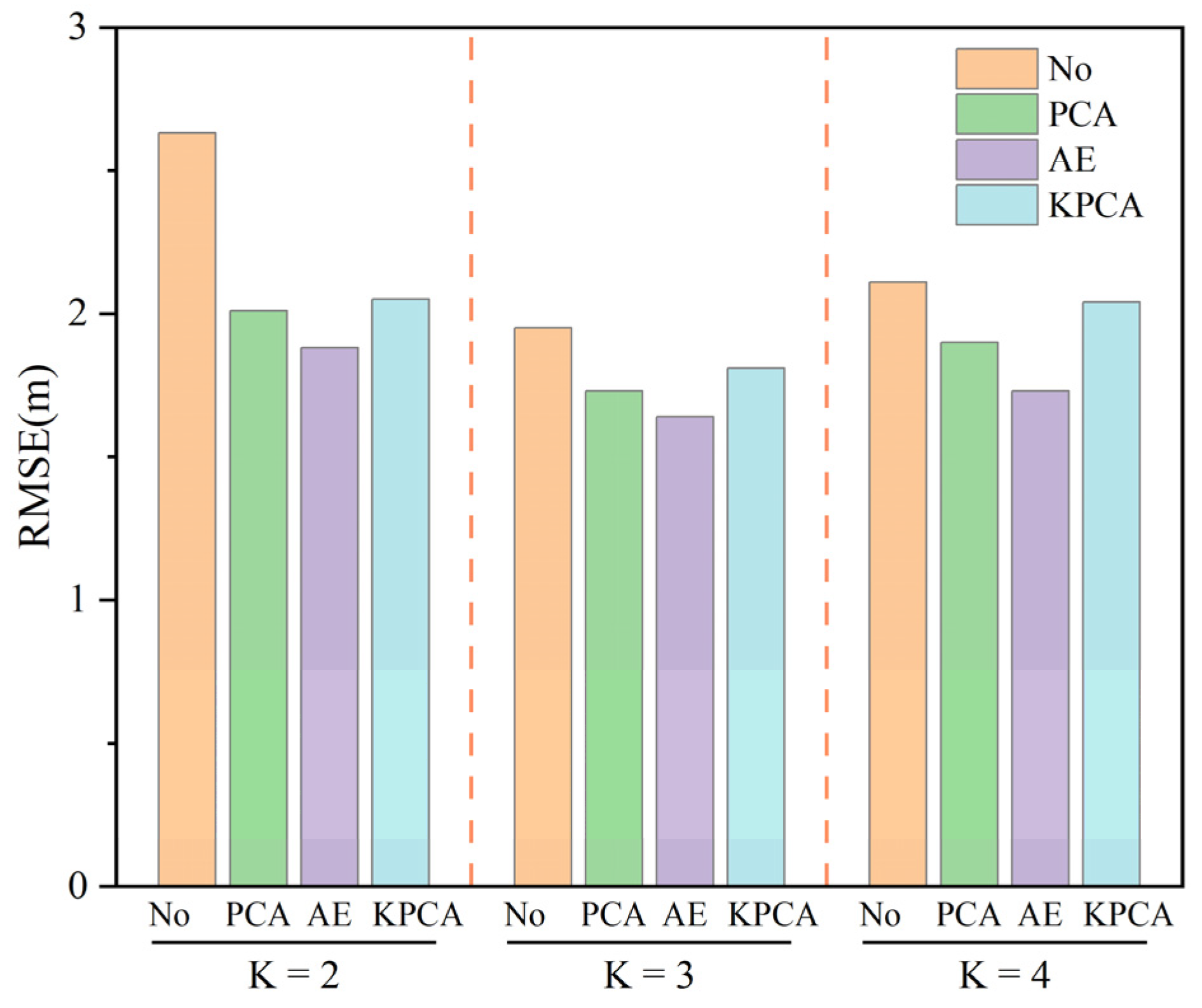
- In the data preprocessing phase, an improved DBSCAN clustering algorithm is proposed for denoising CSI amplitude, and autoencoders are used for feature extraction. These methods’ effectiveness is demonstrated compared with the standard DBSCAN and PCA algorithms.
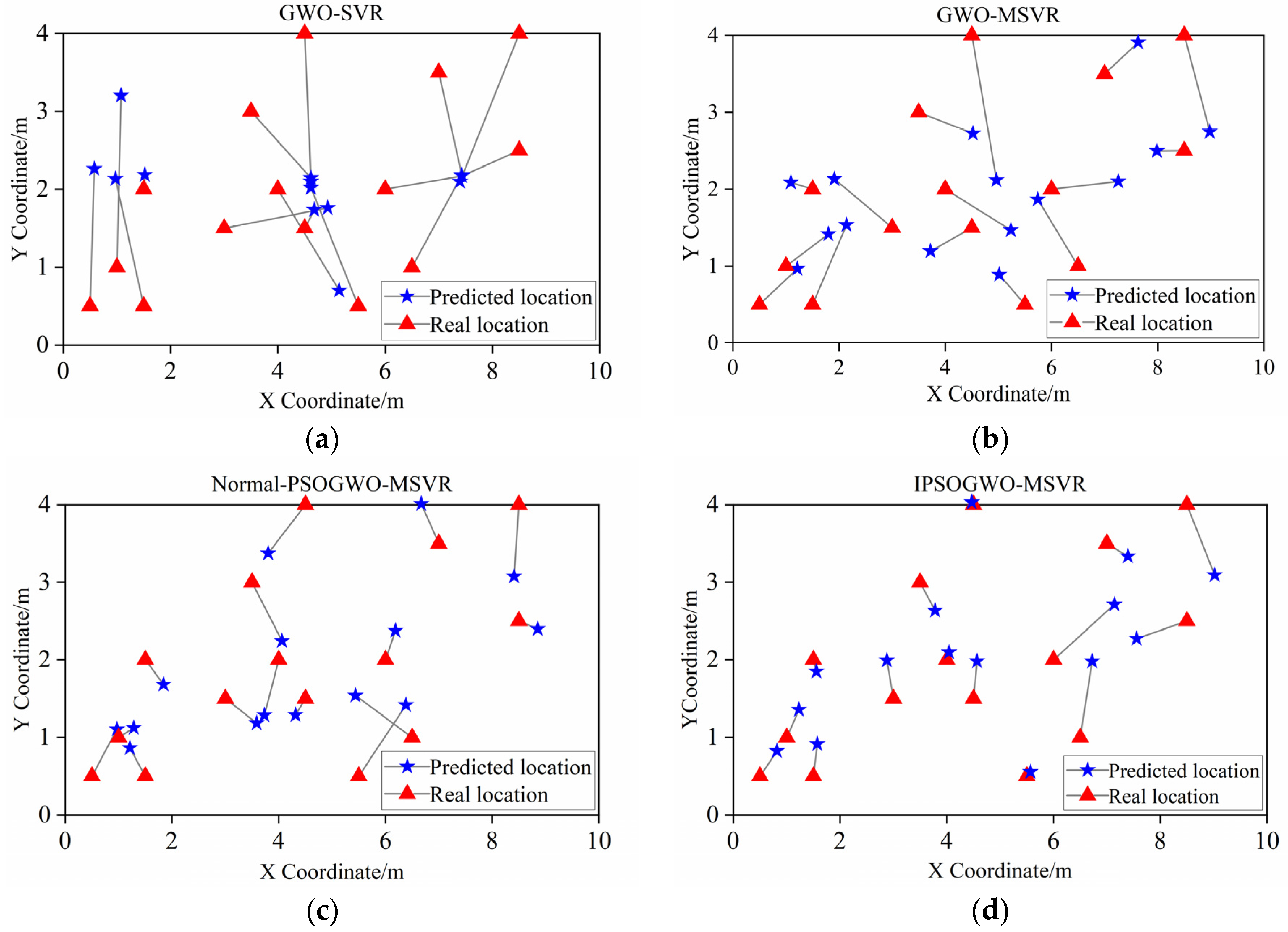
- We employ MSVR for CSI fingerprint localization to bridge the gap in localization efficiency of SVR, and to our knowledge, this is the first time MSVR has been applied in CSI localization.
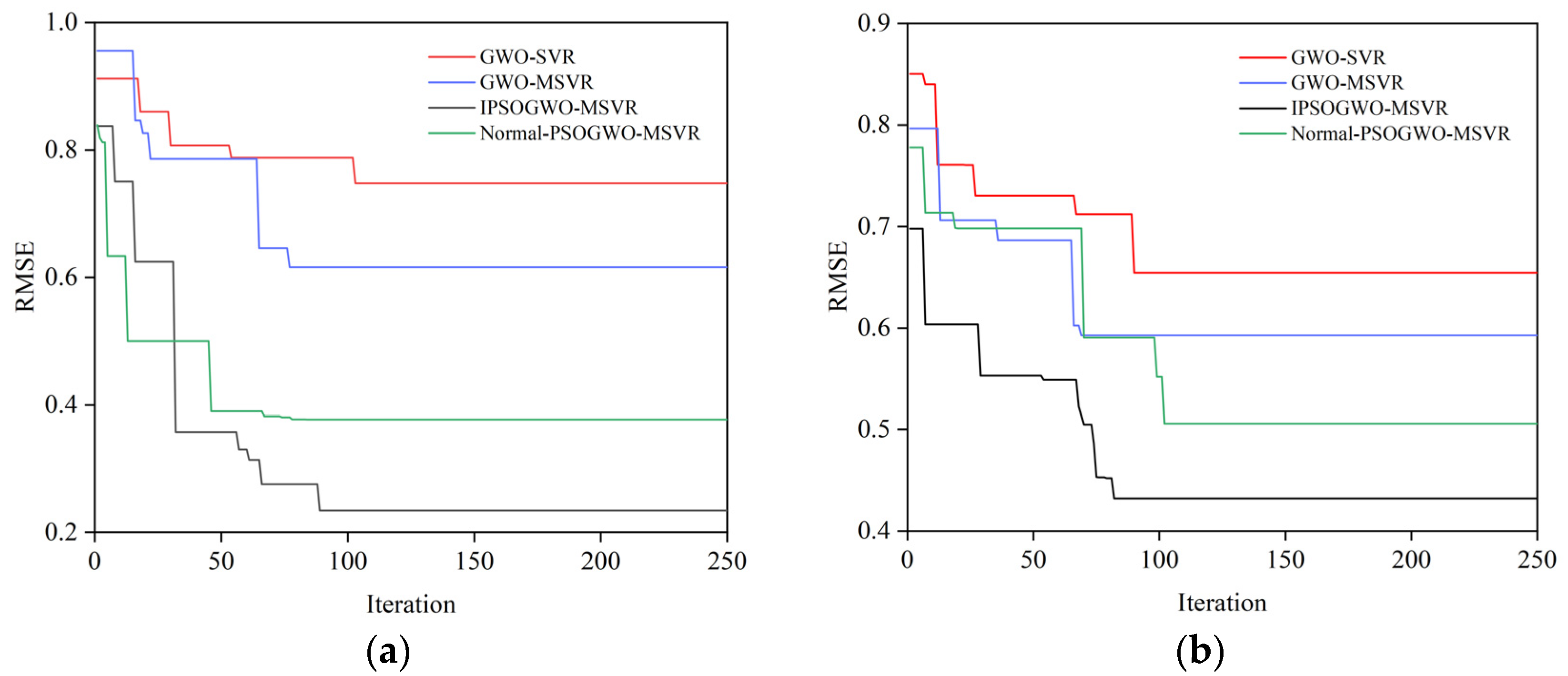
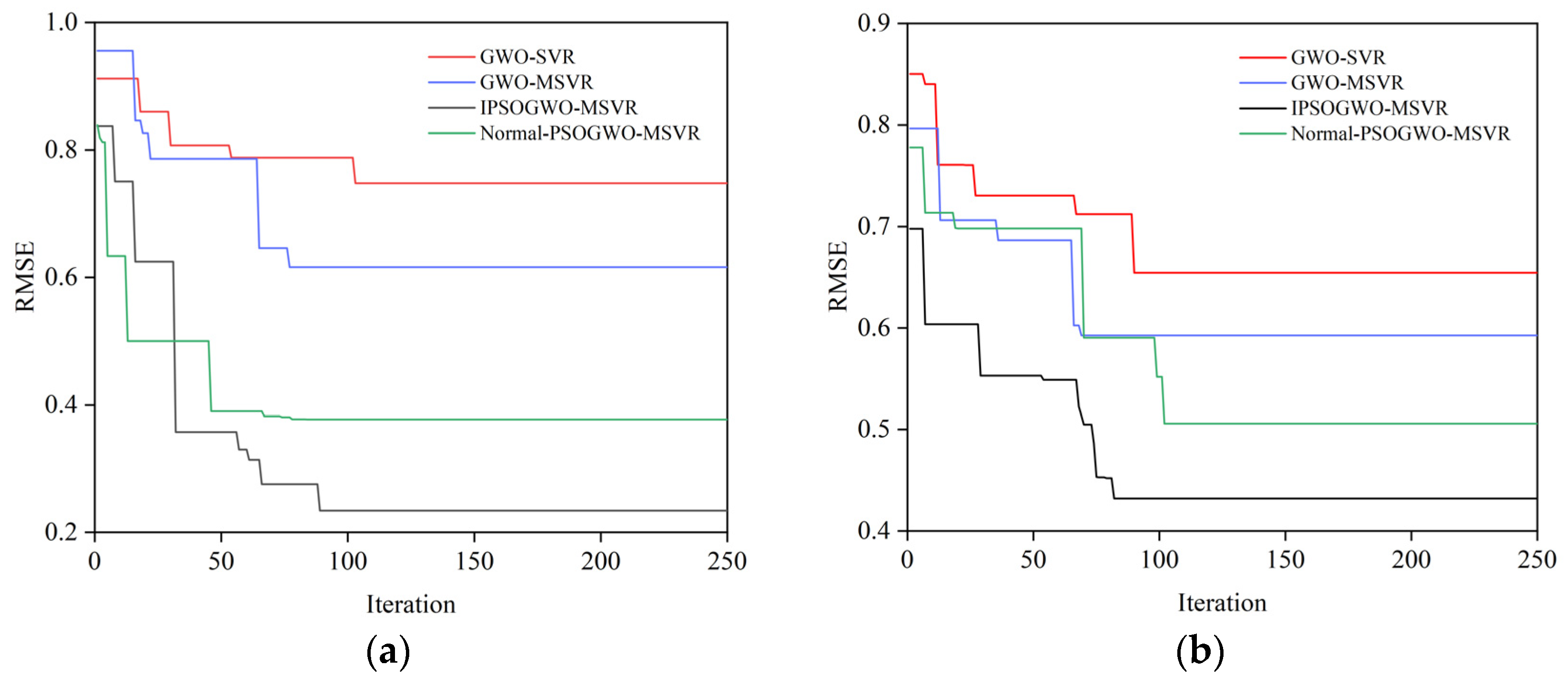
- An improved hybrid optimization algorithm, IPSOGWO, is proposed to adjust the hyperparameters of MSVR to obtain globally optimal parameters. Compared to the unimproved PSOGWO algorithm, the adjusted model can achieve optimal performance.
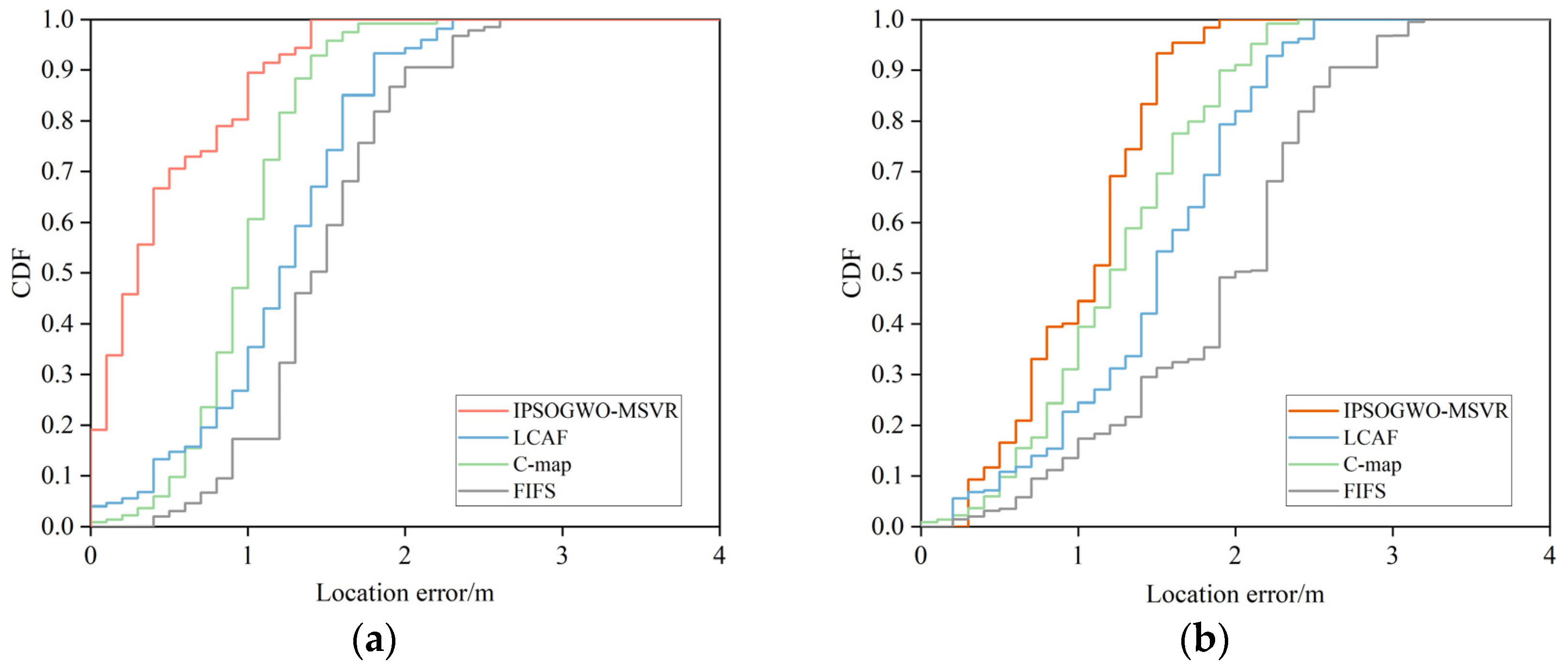
- The superiority of the proposed method is proven by comparing several domestic and international methods in two scenarios.
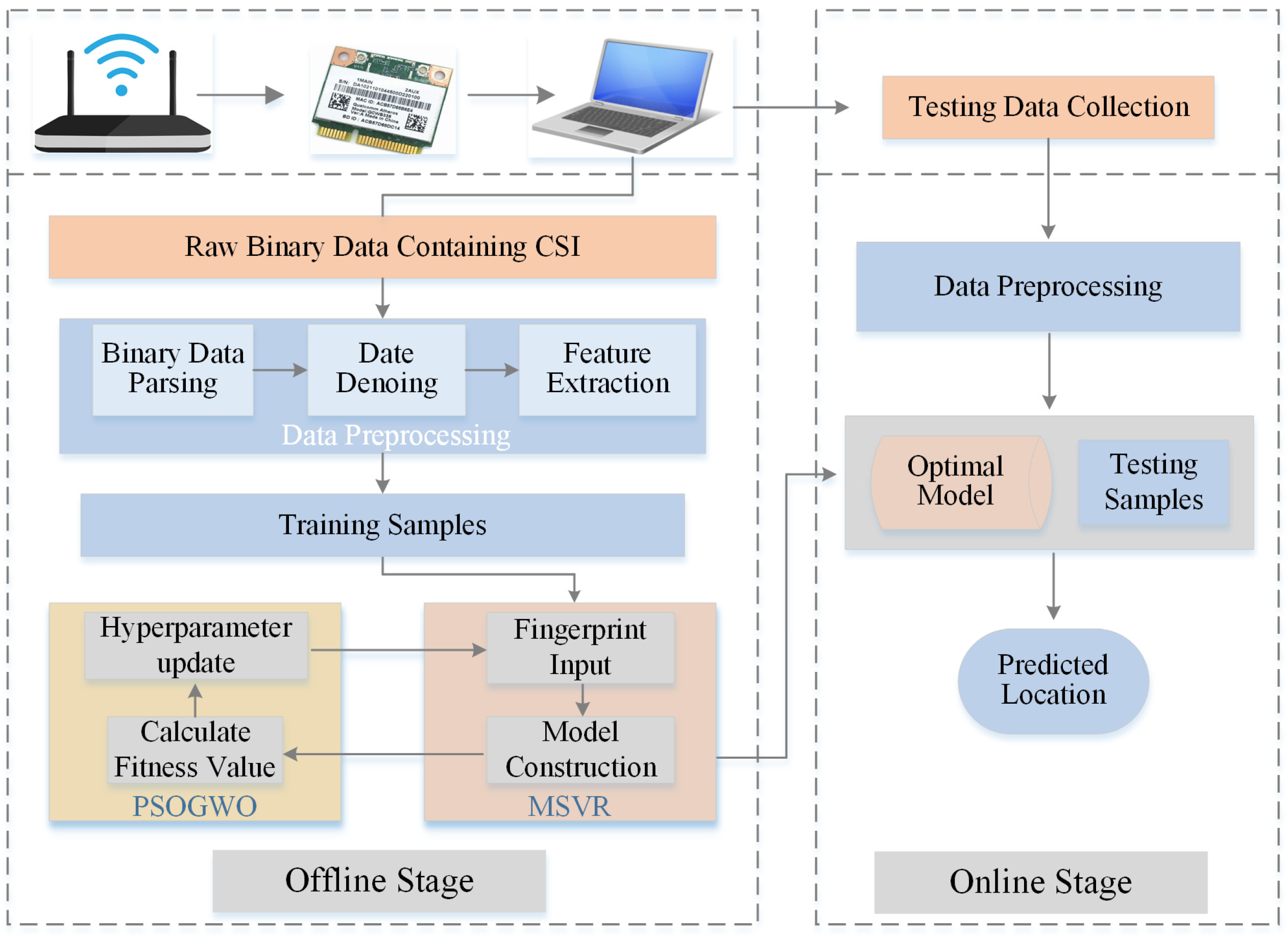
2. Framework and Methodologies
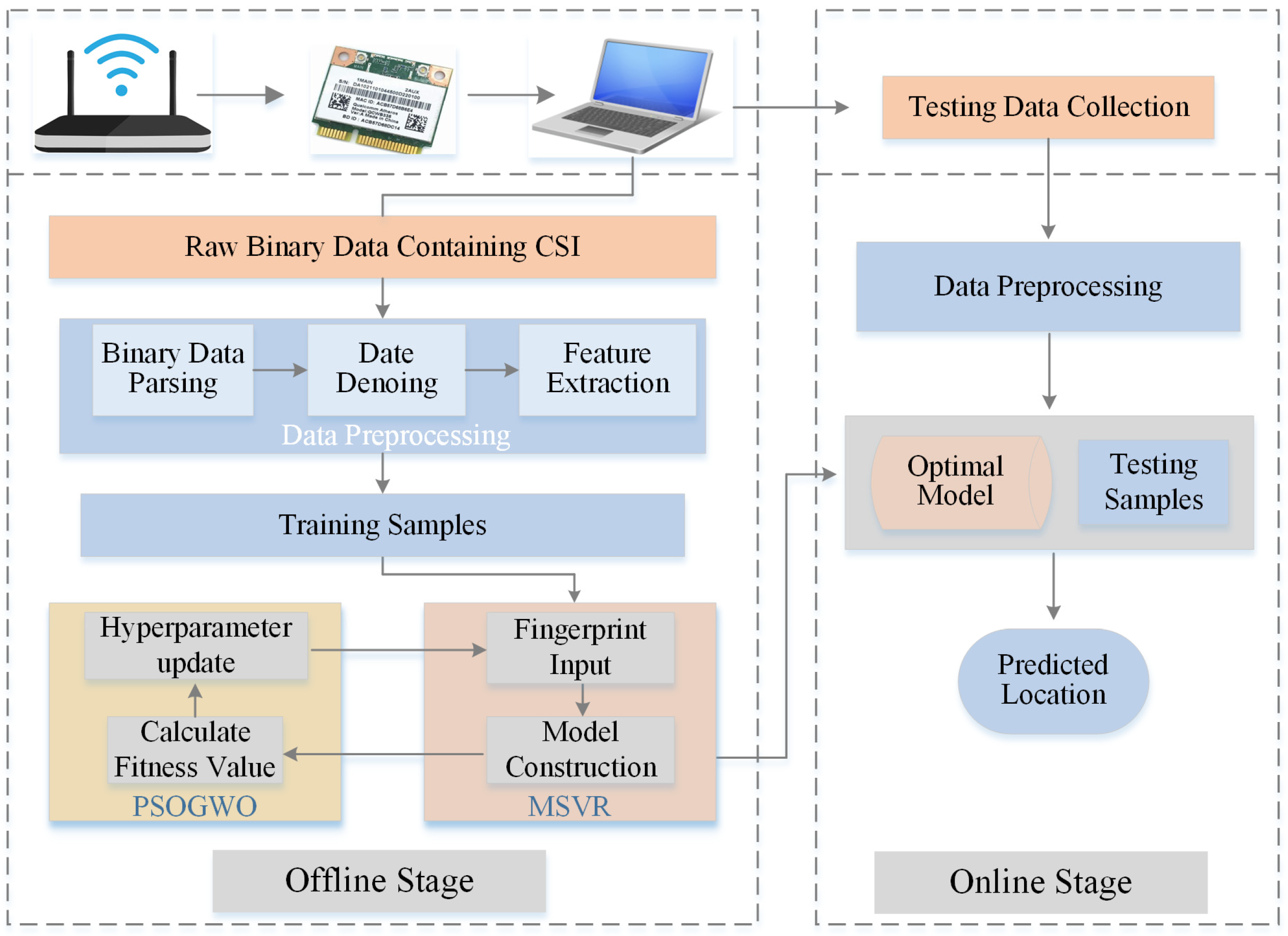
2.1. Systems Framework
2.2. Channel State Information
2.3. Noise Reduction
| Algorithm 1: 2–3 uses A-DBSCAN to remove CSI noise |
| Input: Amplitude information X of a single R-T link, iteration count of K Output: Denoised amplitude X*
|
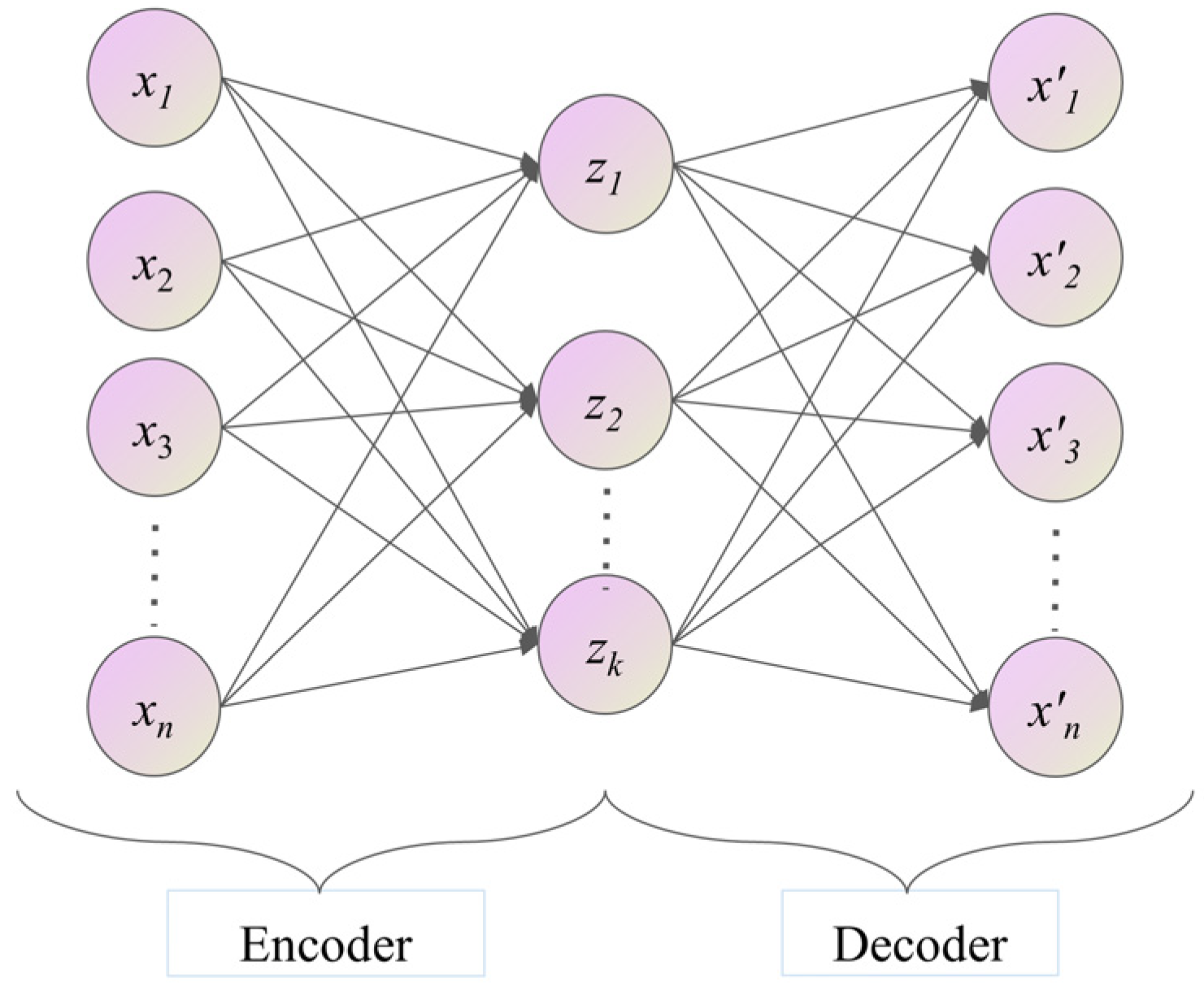
2.4. Feature Extraction
3. Improved Grey Wolf Particle Swarm Hybrid Optimization MSVR Localization Model Construction
3.1. Multi-Output Support Vector Regression
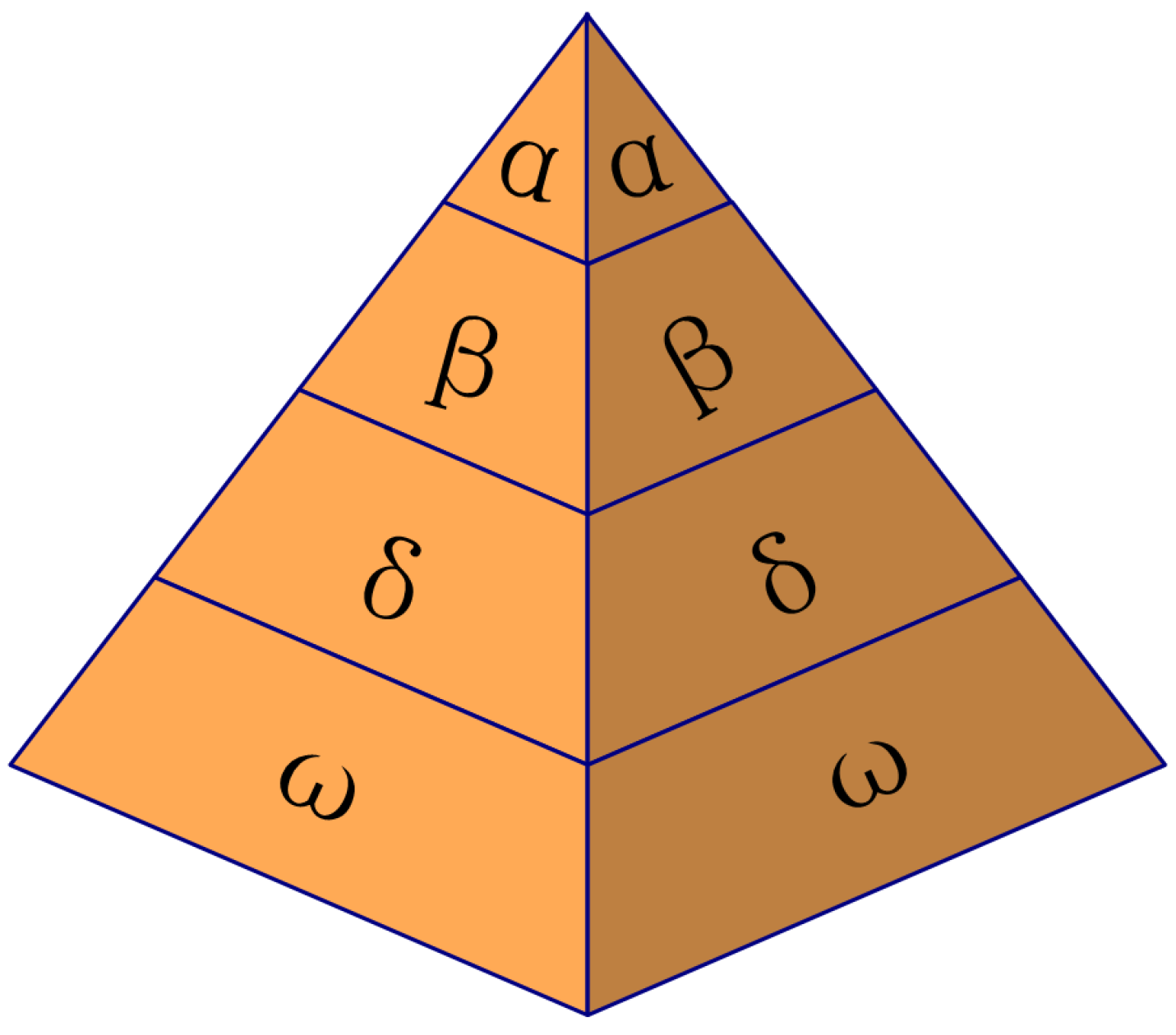
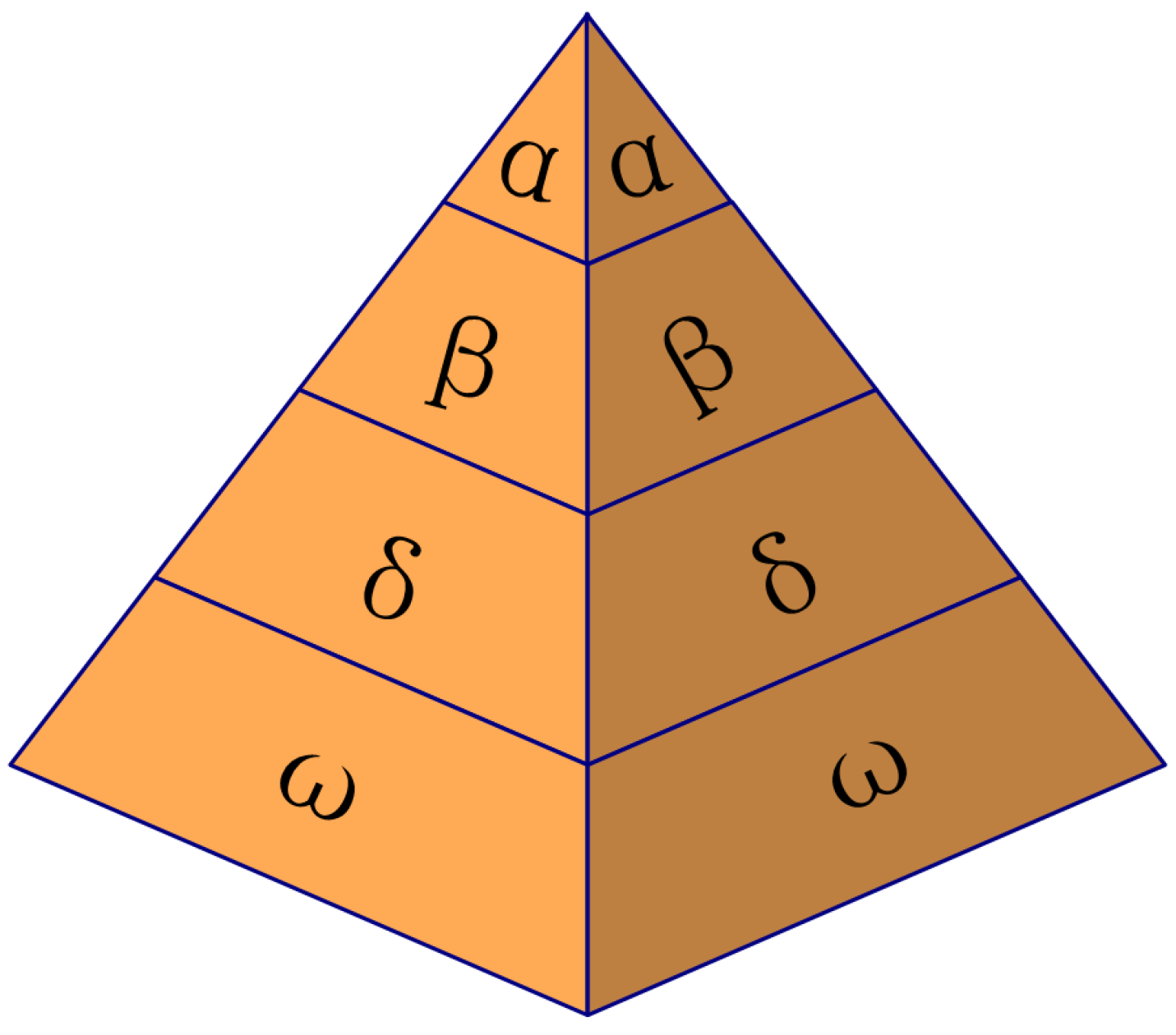
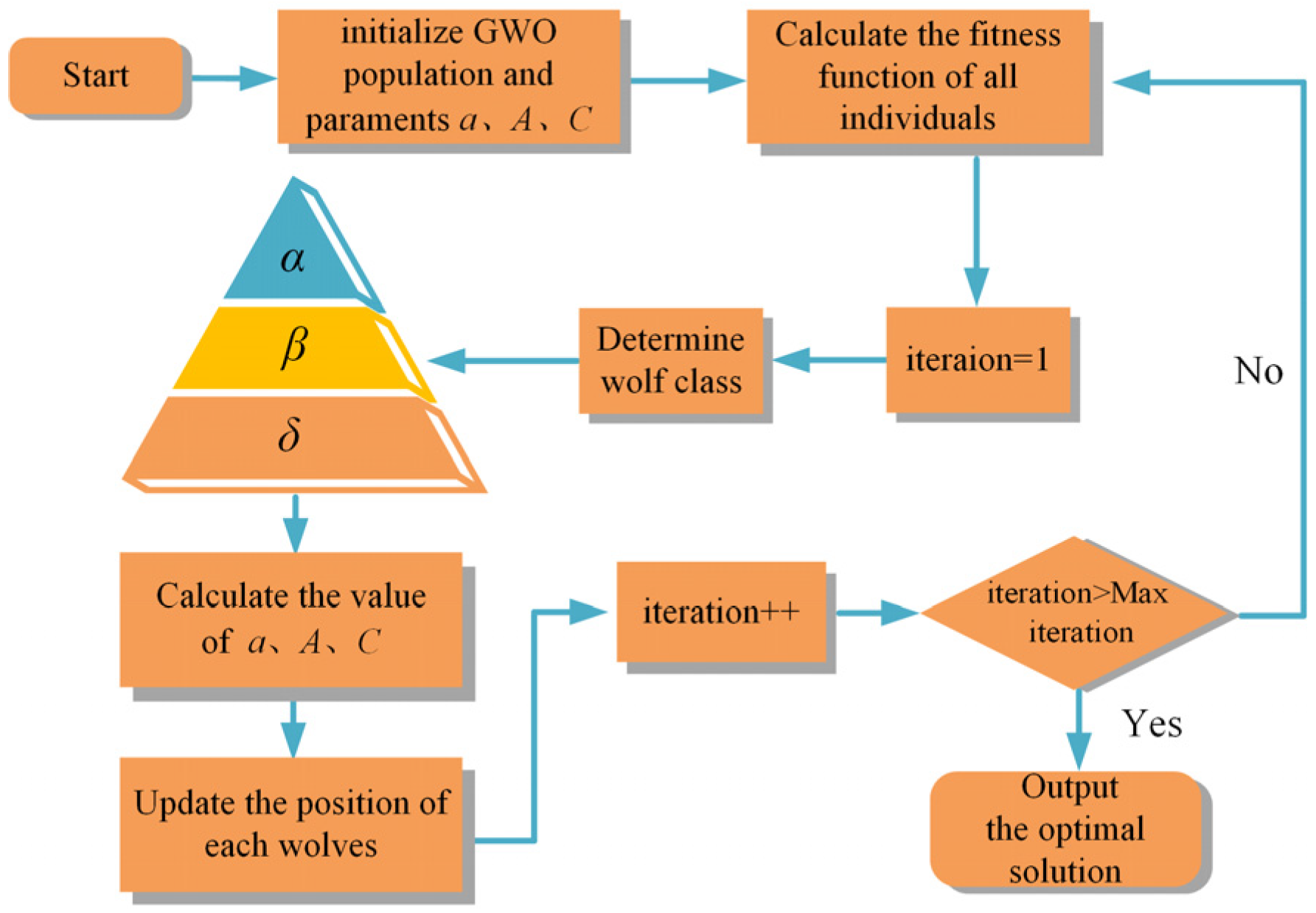
3.2. Grey Wolf Optimization Algorithm
3.3. The IPSOGWO Model
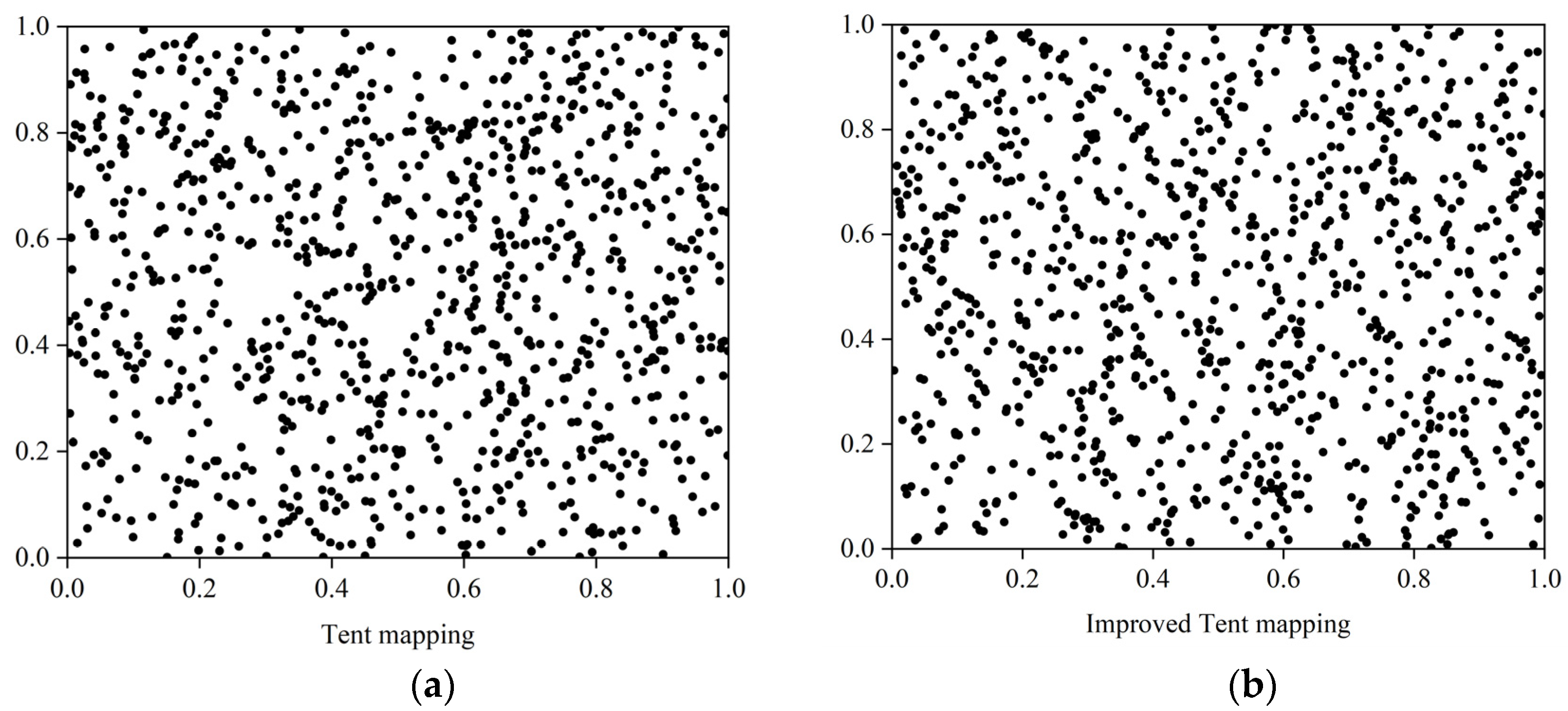
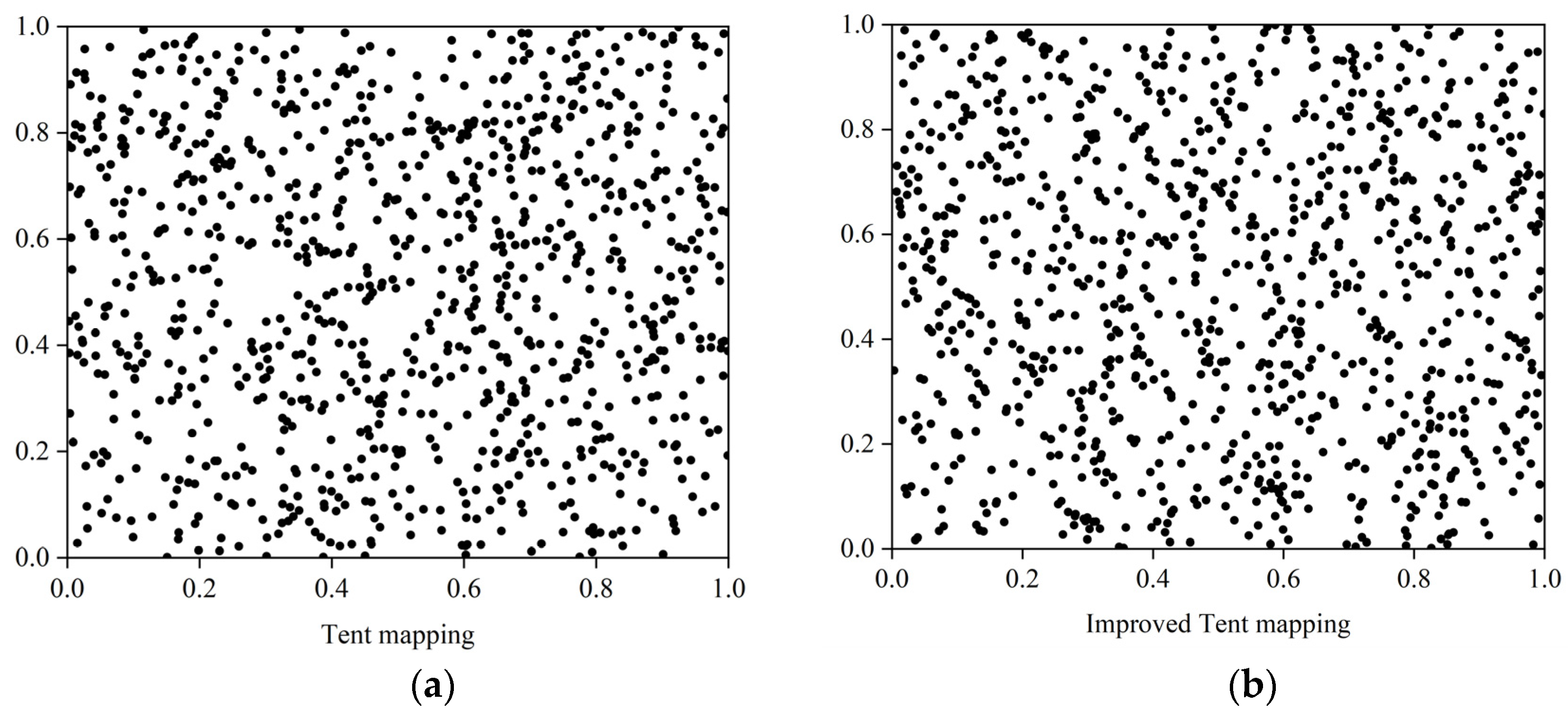
3.3.1. Improved Tent Chaos Mapping
3.3.2. Improved Location Updating Strategy
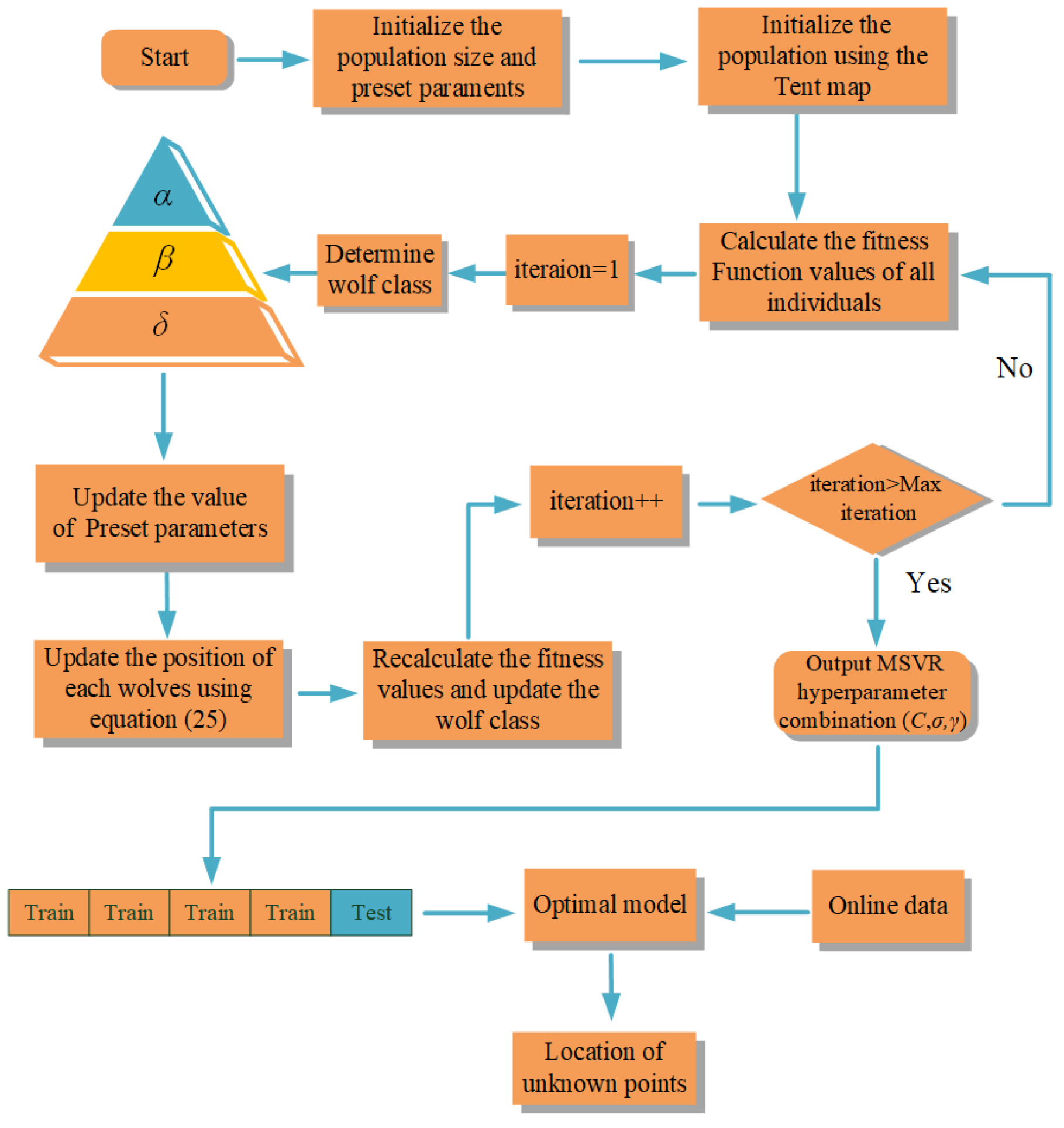
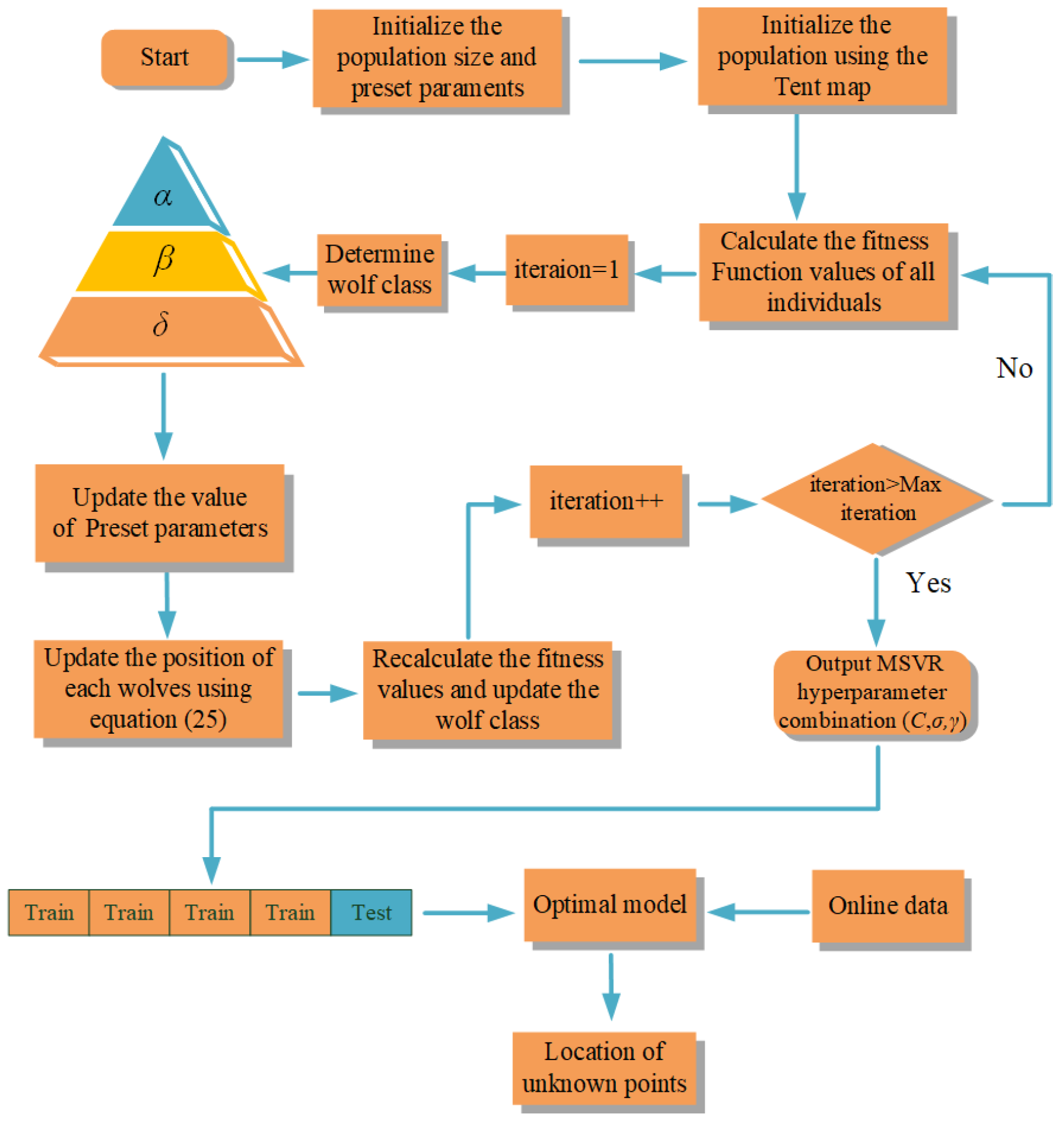
3.3.3. IPSOGWO-MSVR Positioning Model
4. Experiments and Results Analysis
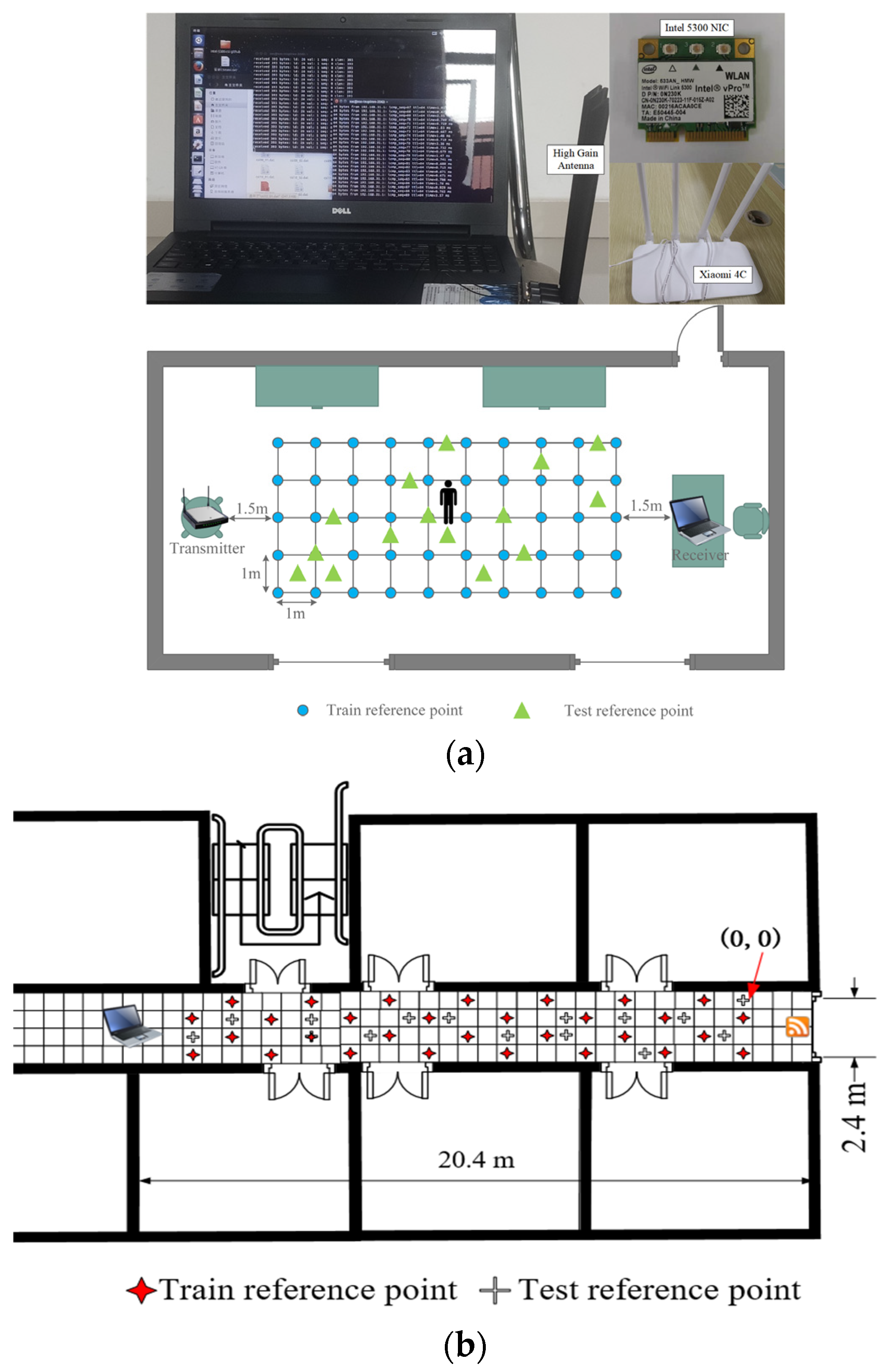
4.1. Data Collection
4.2. Comparison of Preprocessing Methods
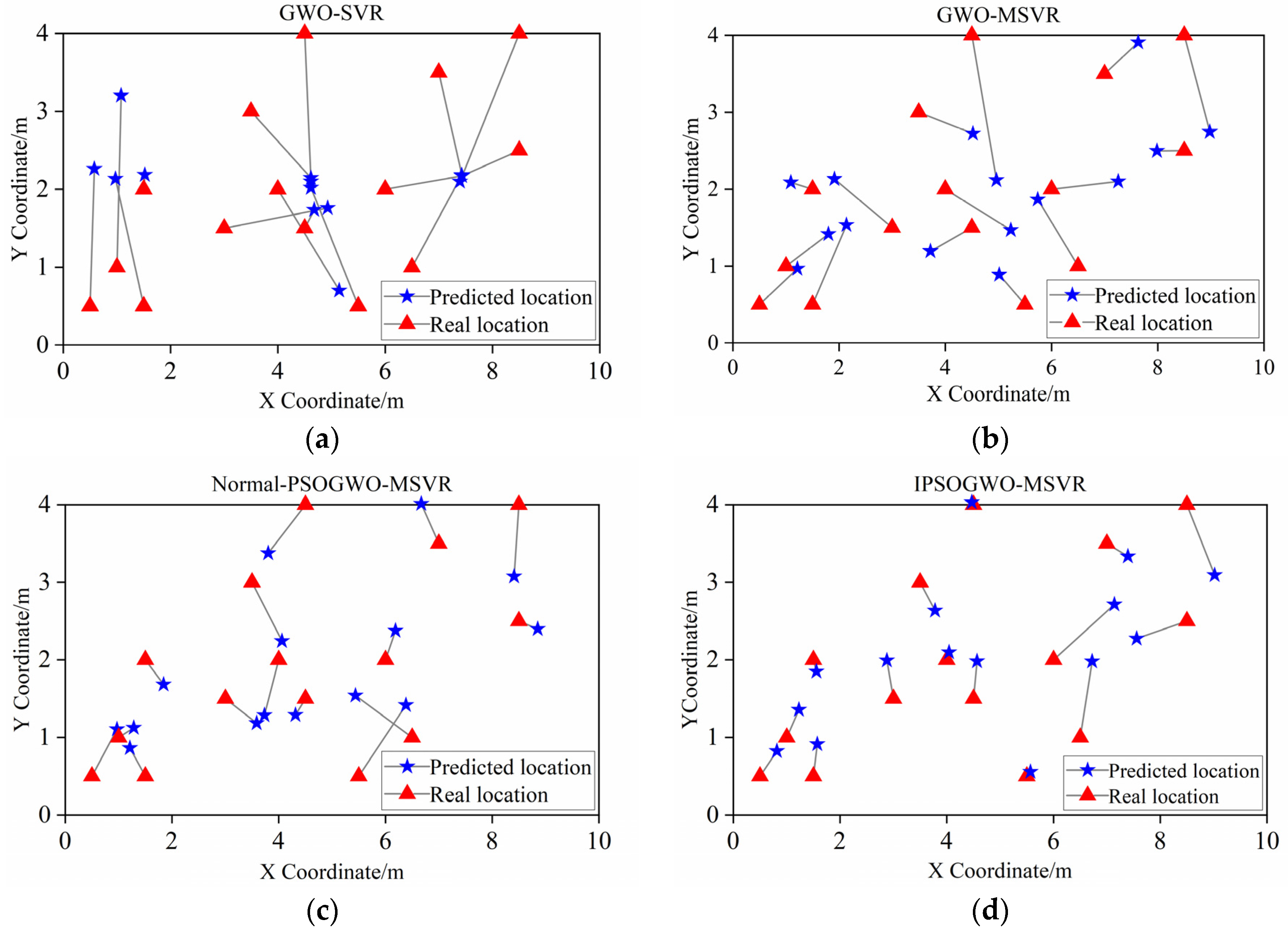
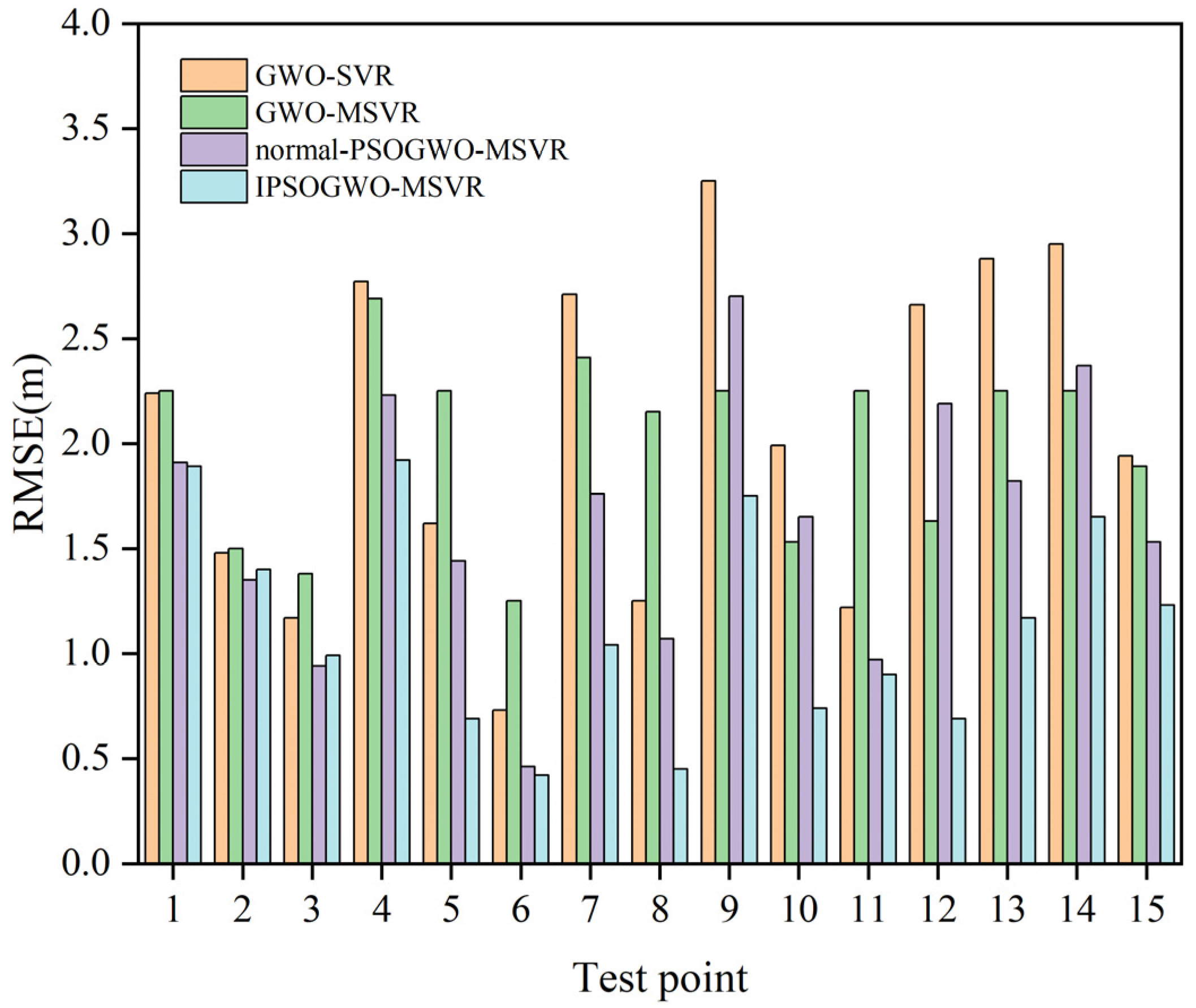
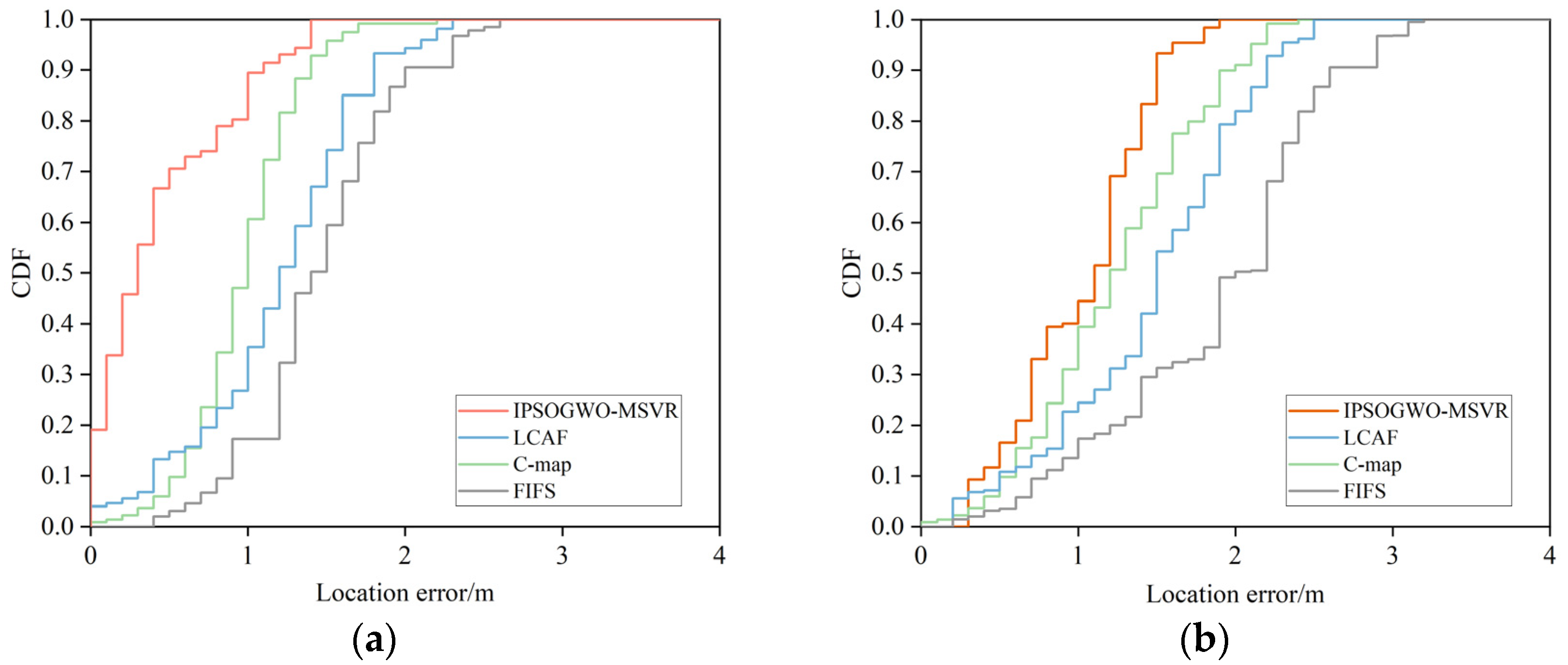
4.3. Comparison with Similar Location Methods
4.4. Comparison of Advanced Positioning Techniques
5. Discussion and Conclusions
5.1. Discussion
5.2. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, K.; Gong, Q.; Ren, Y.; Li, Y.; Han, Y.; Pang, C.; Kong, H. Magnetic Field Positioning Technology of Indoor Sports Bodies. IEEE Sens. J. 2021, 22, 219–228. [Google Scholar] [CrossRef]
- Alarifi, A.; Al-Salman, A.; Alsaleh, M.; Alnafessah, A.; Al-Hadhrami, S.; Al-Ammar, M.A.; Al-Khalifa, H.S. Ultra wideband indoor positioning technologies: Analysis and recent advances. Sensors 2016, 16, 707. [Google Scholar] [CrossRef] [PubMed]
- Huang, B.; Liu, J.; Sun, W.; Yang, F. A robust indoor positioning method based on Bluetooth low energy with separate channel information. Sensors 2019, 19, 3487. [Google Scholar] [CrossRef] [PubMed]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Moutinho, J.; Freitas, D.; Araújo, R.E. Indoor global localisation in anchor-based systems using audio signals. J. Navig. 2016, 69, 1024–1040. [Google Scholar] [CrossRef]
- Rahman, A.M.; Li, T.; Wang, Y. Recent advances in indoor localization via visible lights: A survey. Sensors 2020, 20, 1382. [Google Scholar] [CrossRef]
- Tsai, T.H.; Chang, C.H.; Chen, S.W.; Yao, C.H. Design of vision-based indoor positioning based on embedded system. IET Image Process. 2020, 14, 423–430. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor localization via channel response. ACM Comput. Surv. (CSUR) 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Qiao, S.; Cao, C.; Zhou, H.; Gong, W. The trip to WiFi indoor localization across a decade—A systematic review. In Proceedings of the 2023 26th International Conference on Computer Supported Cooperative Work in Design (CSCWD), Rio de Janeiro, Brazil, 24–26 May 2023; IEEE: Piscataway, NJ, USA, 2023. [Google Scholar] [CrossRef]
- Wang, Y.; Wu, K.; Ni, L.M. Wifall: Device-free fall detection by wireless networks. IEEE Trans. Mob. Comput. 2016, 16, 581–594. [Google Scholar] [CrossRef]
- Halperin, D.; Hu, W.; Sheth, A.; Wetherall, D. Predictable 802.11 packet delivery from wireless channel measurements. ACM SIGCOMM Comput. Commun. Rev. 2010, 40, 159–170. [Google Scholar] [CrossRef]
- Zhou, R.; Lu, X.; Zhao, P.; Chen, J. Device-free presence detection and localization with SVM and CSI fingerprinting. IEEE Sens. J. 2017, 17, 7990–7999. [Google Scholar] [CrossRef]
- Wu, Z.; Xu, Q.; Li, J.; Fu, C.; Xuan, Q.; Xiang, Y. Passive Indoor Localization Based on CSI and Naive Bayes Classification. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1566–1577. [Google Scholar] [CrossRef]
- Zhou, Z.; Yang, Z.; Wu, C.; Shangguan, L.; Liu, Y. Omnidirectional coverage for device-free passive human detection. IEEE Trans. Parallel Distrib. Syst. 2013, 25, 1819–1829. [Google Scholar] [CrossRef]
- Oh, S.H.; Kim, J.G. WiFi positioning in 3GPP indoor office with modified particle swarm optimization. Appl. Sci. 2021, 11, 9522. [Google Scholar] [CrossRef]
- Yang, R.; Yang, X.; Wang, J.; Zhou, M.; Tian, Z.; Li, L. Decimeter level indoor localization using WiFi channel state information. IEEE Sens. J. 2021, 22, 4940–4950. [Google Scholar] [CrossRef]
- He, S.; Dong, X. High-accuracy localization platform using asynchronous time difference of arrival technology. IEEE Trans. Instrum. Meas. 2017, 66, 1728–1742. [Google Scholar] [CrossRef]
- Hashem, O.; Youssef, M.; Harras, K.A. WiNar: RTT-based sub-meter indoor localization using commercial devices. In Proceedings of the 2020 IEEE International Conference on Pervasive Computing and Communications (PerCom), Austin, TX, USA, 23–27 March 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Xiao, J.; Wu, K.; Yi, Y.; Ni, L.M. FIFS: Fine-grained indoor fingerprinting system. In Proceedings of the 2012 21st International Conference on Computer Communications and Networks (ICCCN), Munich, Germany, 30 July–2 August 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1–7. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 66, 763–776. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S. CSI phase fingerprinting for indoor localization with a deep learning approach. IEEE Internet Things J. 2016, 3, 1113–1123. [Google Scholar] [CrossRef]
- Chriki, A.; Touati, H.; Snoussi, H. SVM-based indoor localization in wireless sensor networks. In Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference (IWCMC), Valencia, Spain, 26–30 June 2017; IEEE: Piscataway, NJ, USA, 2017. [Google Scholar] [CrossRef]
- Figuera, C.; Rojo-álvarez, J.L.; Wilby, M.; Mora-Jiménez, I.; Caamano, A.J. Advanced support vector machines for 802.11 indoor location. Signal Process. 2012, 92, 2126–2136. [Google Scholar] [CrossRef]
- Shi, K.; Ma, Z.; Zhang, R.; Hu, W.; Chen, H. Support vector regression based indoor location in IEEE 802.11 environments. Mob. Inf. Syst. 2015, 2015, 1234. [Google Scholar] [CrossRef]
- Xu, H.; Wu, M.; Li, P.; Zhu, F.; Wang, R. An RFID indoor positioning algorithm based on support vector regression. Sensors 2018, 18, 1504. [Google Scholar] [CrossRef] [PubMed]
- Yin, X.; Sun, Y.; Wang, C. Positioning errors predicting method of strapdown inertial navigation systems based on PSO-SVM. Abstr. Appl. Analysis 2013, 2013, 737146. [Google Scholar] [CrossRef]
- Liu, X.; Wang, W.; Guo, Z.; Wang, C.; Tu, C. Research on adaptive SVR indoor location based on GA optimization. Wirel. Pers. Commun. 2019, 109, 1095–1120. [Google Scholar] [CrossRef]
- Khan, A.; Khan, A.; Bangash, J.I.; Subhan, F.; Khan, A.; Khan, A.; Uddin, M.I.; Mahmoud, M. Cuckoo Search-based SVM (CS-SVM) Model for Real-Time Indoor Position Estimation in IoT Networks. Secur. Commun. Netw. 2021, 2021, 6654926. [Google Scholar] [CrossRef]
- Li, H.; Su, J.; Liu, W.; Zhang, Y.; Zhou, X. Indoor Positioning Model Based on Support Vector Regression Optimized by the Sparrow Search Algorithm. In Proceedings of the 2021 11th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Cracow, Poland, 22–25 September 2021; IEEE: Piscataway, NJ, USA, 2021; Volume 2, pp. 610–615. [Google Scholar] [CrossRef]
- Zhou, R.; Tang, M.; Gong, Z.; Hao, M. FreeTrack: Device-free human tracking with deep neural networks and particle filtering. IEEE Syst. J. 2019, 14, 2990–3000. [Google Scholar] [CrossRef]
- Dang, X.; Ru, C.; Hao, Z. An indoor positioning method based on CSI and SVM regression. Comput. Eng. Sci. 2021, 43, 853. [Google Scholar] [CrossRef]
- Dang, X.; Tang, X.; Hao, Z.; Liu, Y. A device-free indoor localization method using CSI with Wi-Fi signals. Sensors 2019, 19, 3233. [Google Scholar] [CrossRef] [PubMed]
- Oshiga, O.; Suleiman, H.U.; Thomas, S.; Nzerem, P.; Farouk, L.; Adeshina, S. Human detection for crowd count estimation using CSI of WiFi signals. In Proceedings of the 2019 15th International Conference on Electronics, Computer and Computation (ICECCO), Abuja, Nigeria, 10–12 December 2019; IEEE: Piscataway, NJ, USA, 2019. [Google Scholar] [CrossRef]
- Kui, W.; Mao, S.; Hei, X.; Li, F. Towards accurate indoor localization using channel state information. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics-Taiwan (ICCE-TW), Taichung, Taiwan, 19–21 May 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–2. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, W.; Xu, C.; Qin, J.; Yu, S.; Zhang, Y. SICD: Novel single-access-point indoor localization based on CSI-MIMO with dimensionality reduction. Sensors 2021, 21, 1325. [Google Scholar] [CrossRef]
- Bokhari, S.M.; Sohaib, S.; Khan, A.R.; Shafi, M.; Khan, A.U.R. DGRU based human activity recognition using channel state information. Measurement 2021, 167, 108245. [Google Scholar] [CrossRef]
- Yu, C.; Sheu, J.P.; Kuo, Y.C. Broad Learning System for Indoor CSI Fingerprint Localization. In Proceedings of the 2023 IEEE Wireless Communications and Networking Conference (WCNC), Glasgow, UK, 26–29 March 2023; IEEE: Piscataway, NJ, USA, 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Halperin, D.C. Simplifying the Configuration of 802.11 Wireless Networks with Effective SNR. Ph.D. Thesis, University of Washington, Washington, DC, USA, 2013. [Google Scholar] [CrossRef]
- Hao, Z.; Yan, Y.; Dang, X.; Shao, C. Endpoints-clipping CSI amplitude for SVM-based indoor localization. Sensors 2019, 19, 3689. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Gao, X.; Dai, X.; Xia, Y.; Hou, B. WiFi Indoor Location Based on Area Segmentation. Sensors 2022, 22, 7920. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Liu, S.; Wu, N. CAEFI: Channel State Information Fingerprint Indoor Location Method Using Convolutional Autoencoder for Dimension Reduction. J. Electron. Inf. Technol. 2022, 44, 2757–2766. [Google Scholar] [CrossRef]
- Lee, J.; Choi, B.; Kim, E. Novel range-free localization based on multidimensional support vector regression trained in the primal space. IEEE Trans. Neural Netw. Learn. Syst. 2013, 24, 1099–1113. [Google Scholar] [CrossRef] [PubMed]
- Bao, Y.; Xiong, T.; Hu, Z. Multi-step-ahead time series prediction using multiple-output support vector regression. Neurocomputing 2014, 129, 482–493. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Shan, L.; Qiang, H.; Li, J.; Wang, Z. Chaotic optimization algorithm based on Tent map. Control Decis. 2005, 20, 179–182. [Google Scholar] [CrossRef]
- Teng, Z.; Lv, J.; Guo, L. An improved hybrid grey wolf optimization algorithm. Soft Comput. 2019, 23, 6617–6631. [Google Scholar] [CrossRef]
- Liu, W.; Cheng, Q.; Deng, Z.; Fu, X.; Zheng, X. C-map: Hyper-resolution adaptive preprocessing system for CSI amplitude-based fingerprint localization. IEEE Access 2019, 7, 135063–135075. [Google Scholar] [CrossRef]
- Liu, D.; Liu, Z.; Song, Z. LDA-based CSI amplitude fingerprinting for device-free localization. In Proceedings of the 2020 Chinese Control and Decision Conference (CCDC), Hefei, China, 22–24 August 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | Transmitter | Receiver |
|---|---|---|
| Network Standard | IEEE 802.11 b/g/n | |
| Maximum Transmission Rate | 300 Mbps | |
| Operating Band | 2.4 GHz | |
| Number of Antennas | 4 | 3 |
| MIMO Mode | 2 × 2 MIMO | 2 × 3 MIMO |
| Reduction Algorithms | Parameters | Value |
|---|---|---|
| AE | Coding dimension | 20 |
| Iterations | 200 | |
| Activation functions (encoding and decoding layers) | tanh | |
| Adam optimizer learning rate | 0.01 | |
| Loss function | MSE | |
| PCA | Variance explained/number of principal components | 99%/74 |
| KPCA | Kernel function | RBF |
| Variance explained/number of principal components | 99%/110 |
| Scenarios | Value | C | σ | γ |
|---|---|---|---|---|
| Scenarios 1 | GWO-SVR | 0.1 | 0.1 | 0.04 |
| GWO-MSVR | 0.1 | 0.1 | 0.66 | |
| IPSOGWO-MSVR | 0.1 | 11.8 | 0.23 | |
| Normal-PSOGWO-MSVR | 0.1 | 9.7 | 0.62 | |
| Scenarios 2 | GWO-SVR | 0.3 | 0.1 | 0.05 |
| GWO-MSVR | 0.2 | 0.1 | 0.71 | |
| IPSOGWO-MSVR | 0.2 | 8.1 | 0.47 | |
| Normal-PSOGWO-MSVR | 0.3 | 7.5 | 0.86 |
| Scenarios | Method | Maximum Error (m) | Minimum Error (m) | Mean Error (m) |
|---|---|---|---|---|
| Scenario 1 | FIFS | 2.61 | 0.47 | 1.50 |
| C-map | 2.07 | 0.18 | 1.03 | |
| LCAF | 2.21 | 0.36 | 1.24 | |
| PSOGWO-MSVR | 1.35 | 0.11 | 0.59 | |
| Scenario 2 | FIFS | 3.27 | 0.42 | 2.20 |
| C-map | 2.44 | 0.33 | 1.34 | |
| LCAF | 2.56 | 0.32 | 1.58 | |
| PSOGWO-MSVR | 1.92 | 0.41 | 1.12 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xie, S.; Yu, X.; Guo, Z.; Zhu, M.; Han, Y. Multi-Output Regression Indoor Localization Algorithm Based on Hybrid Grey Wolf Particle Swarm Optimization. Appl. Sci. 2023, 13, 12167. https://doi.org/10.3390/app132212167
Xie S, Yu X, Guo Z, Zhu M, Han Y. Multi-Output Regression Indoor Localization Algorithm Based on Hybrid Grey Wolf Particle Swarm Optimization. Applied Sciences. 2023; 13(22):12167. https://doi.org/10.3390/app132212167
Chicago/Turabian StyleXie, Shicheng, Xuexiang Yu, Zhongchen Guo, Mingfei Zhu, and Yuchen Han. 2023. "Multi-Output Regression Indoor Localization Algorithm Based on Hybrid Grey Wolf Particle Swarm Optimization" Applied Sciences 13, no. 22: 12167. https://doi.org/10.3390/app132212167
APA StyleXie, S., Yu, X., Guo, Z., Zhu, M., & Han, Y. (2023). Multi-Output Regression Indoor Localization Algorithm Based on Hybrid Grey Wolf Particle Swarm Optimization. Applied Sciences, 13(22), 12167. https://doi.org/10.3390/app132212167