

A Study on H∞-Fuzzy Controller for a Non-Linear Wind Turbine with Uncertainty


Abstract
:1. Introduction
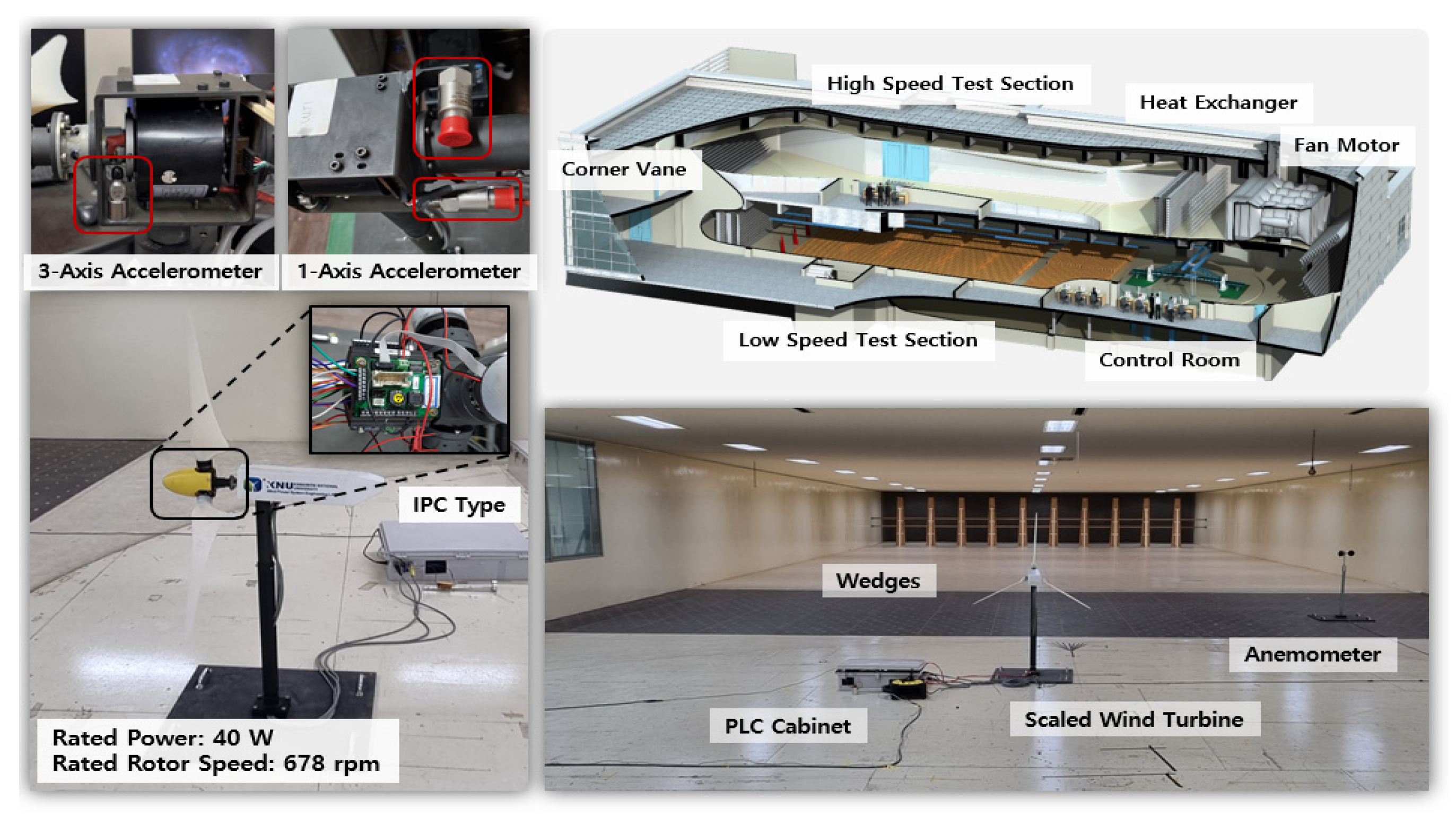
2. Wind Turbine Specification
3. Control Algorithms
3.1. Model Linearization
3.2. Desired Set Points
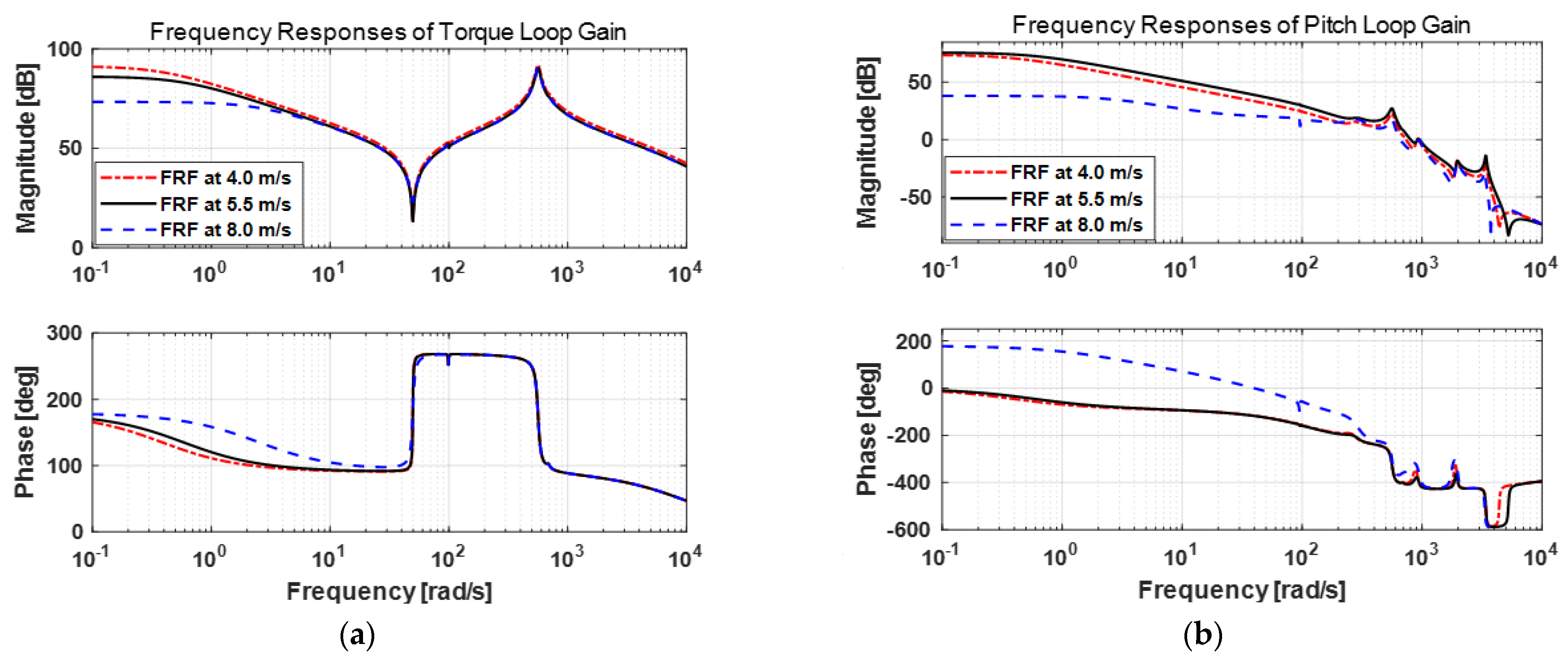
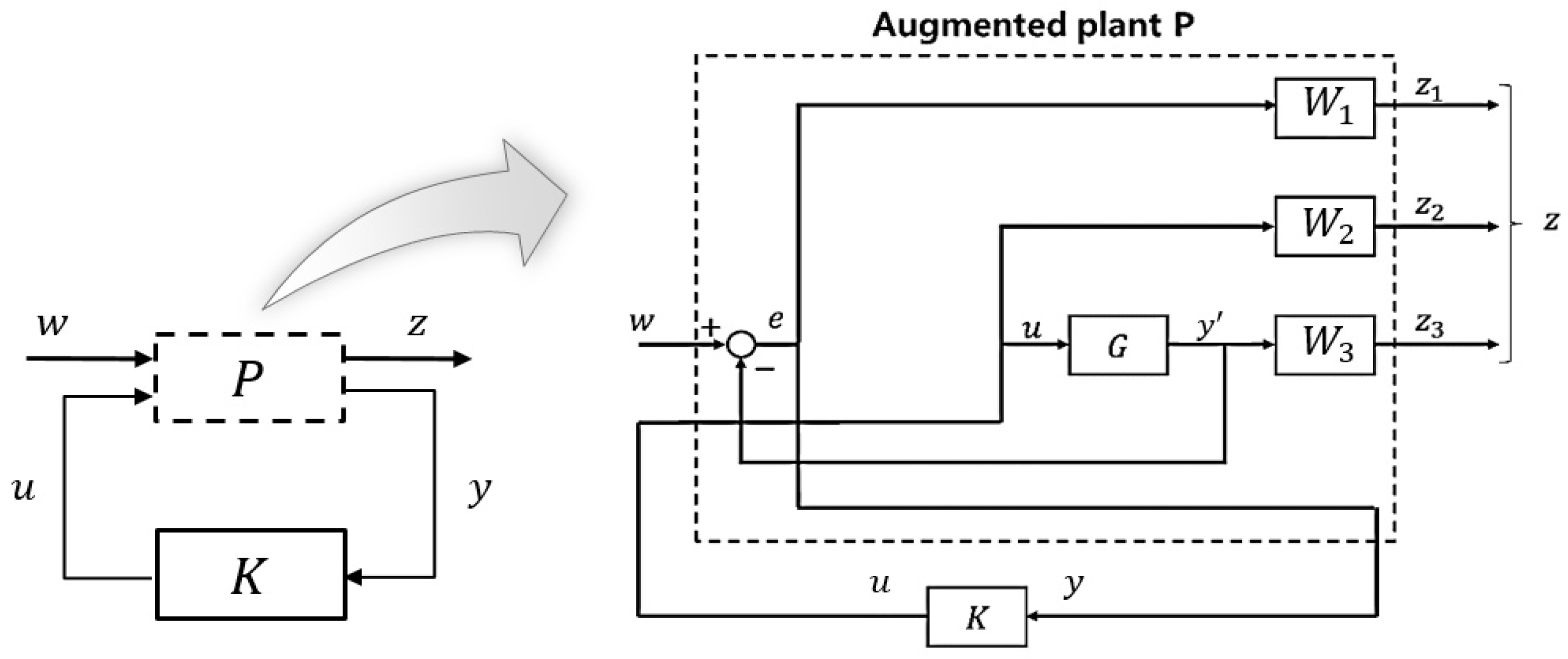
3.3. Mixed-Sensitivity Control Algorithm
3.4. Fuzzy Inference Algorithm
3.5. Controller Implementation
4. Controller Validation
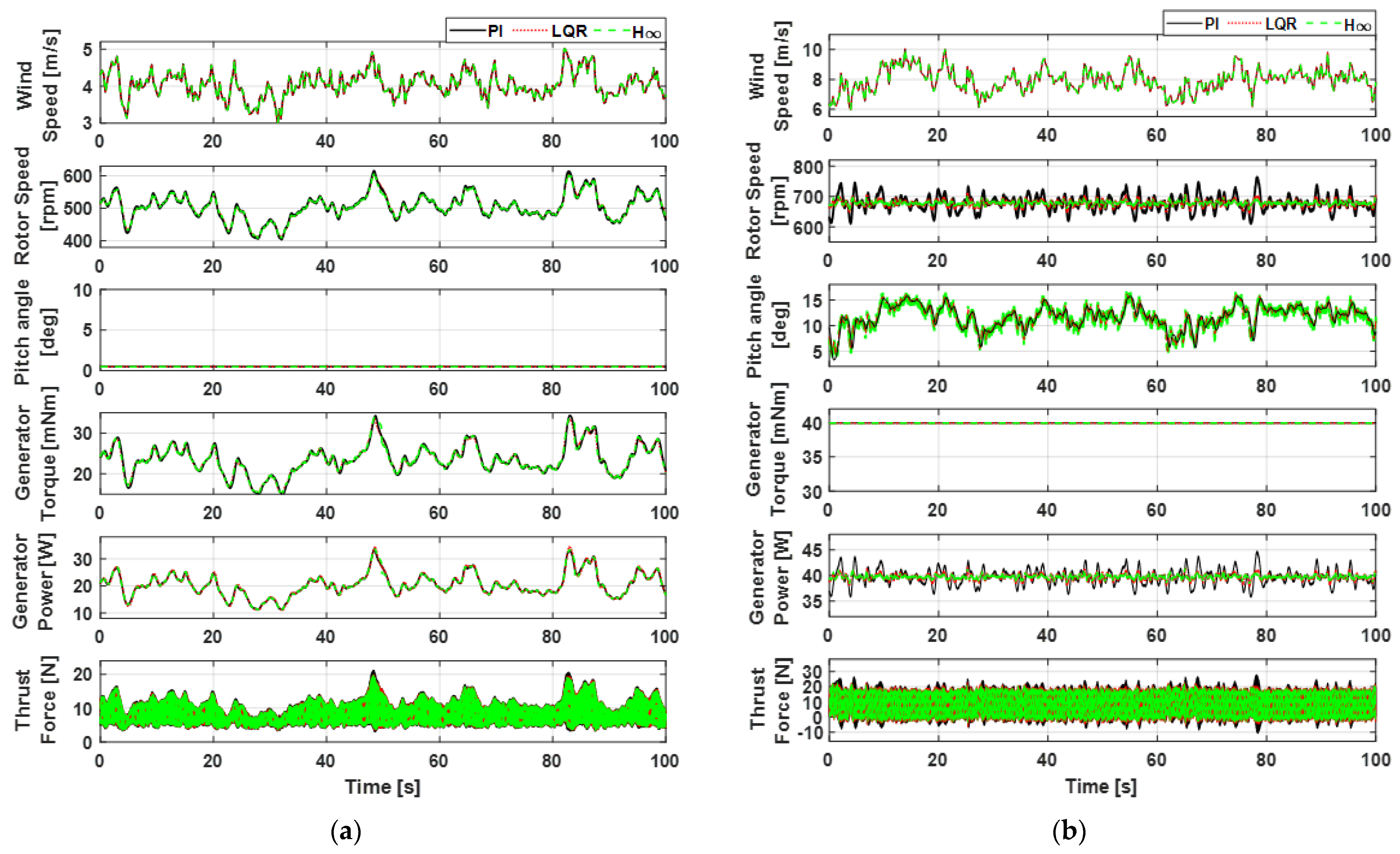
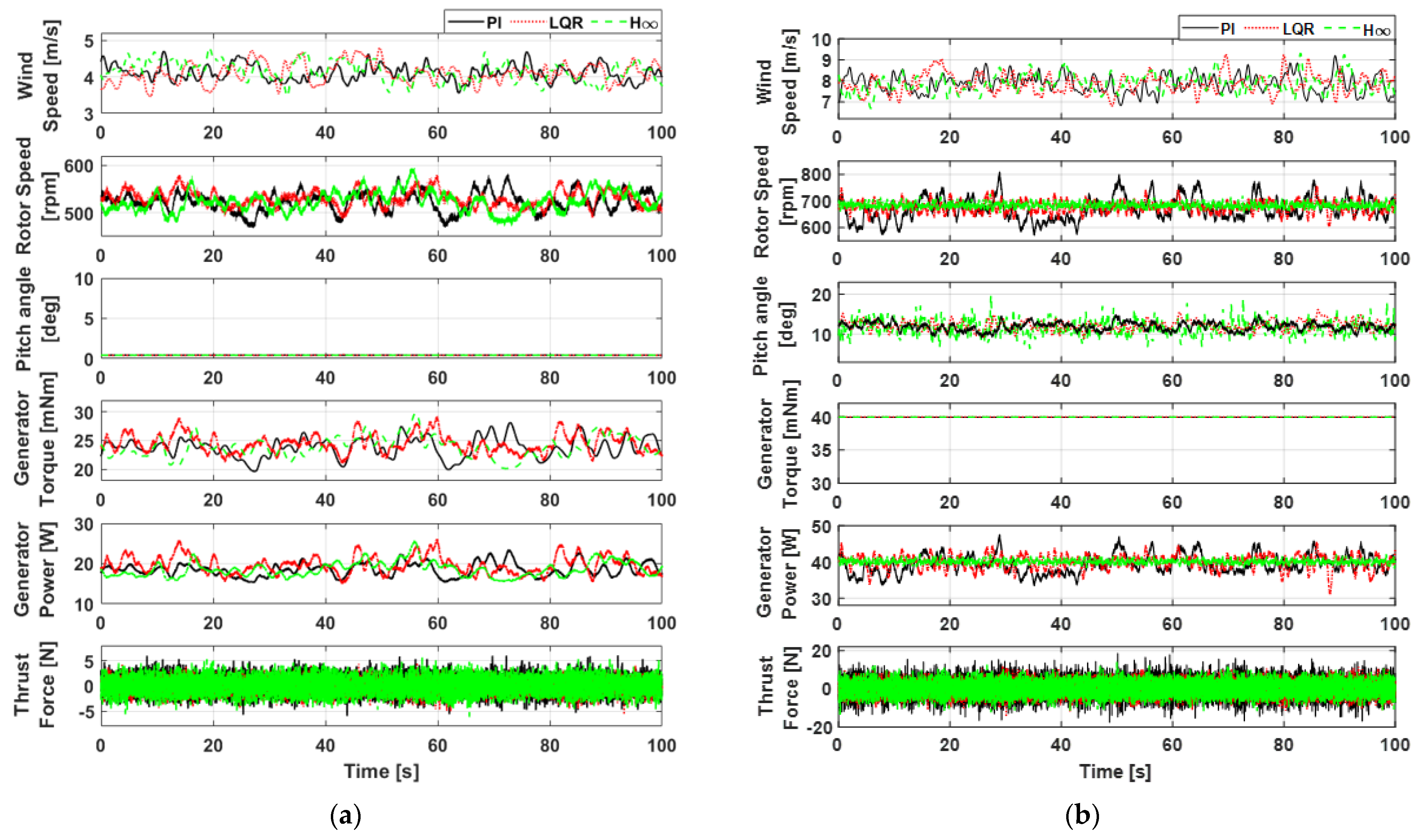
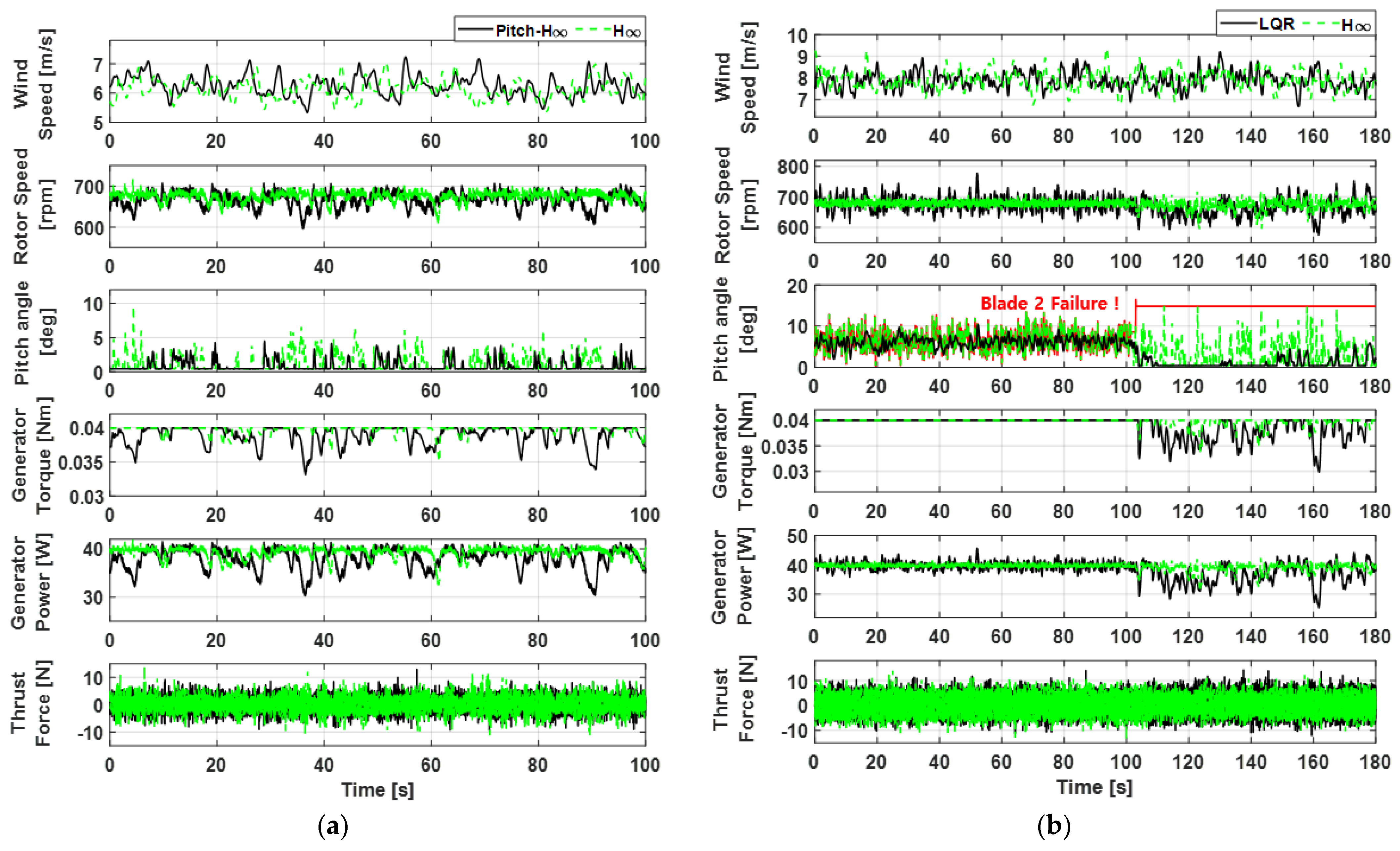
4.1. Dynamic Simulations
4.2. Wind Tunnel Experiments
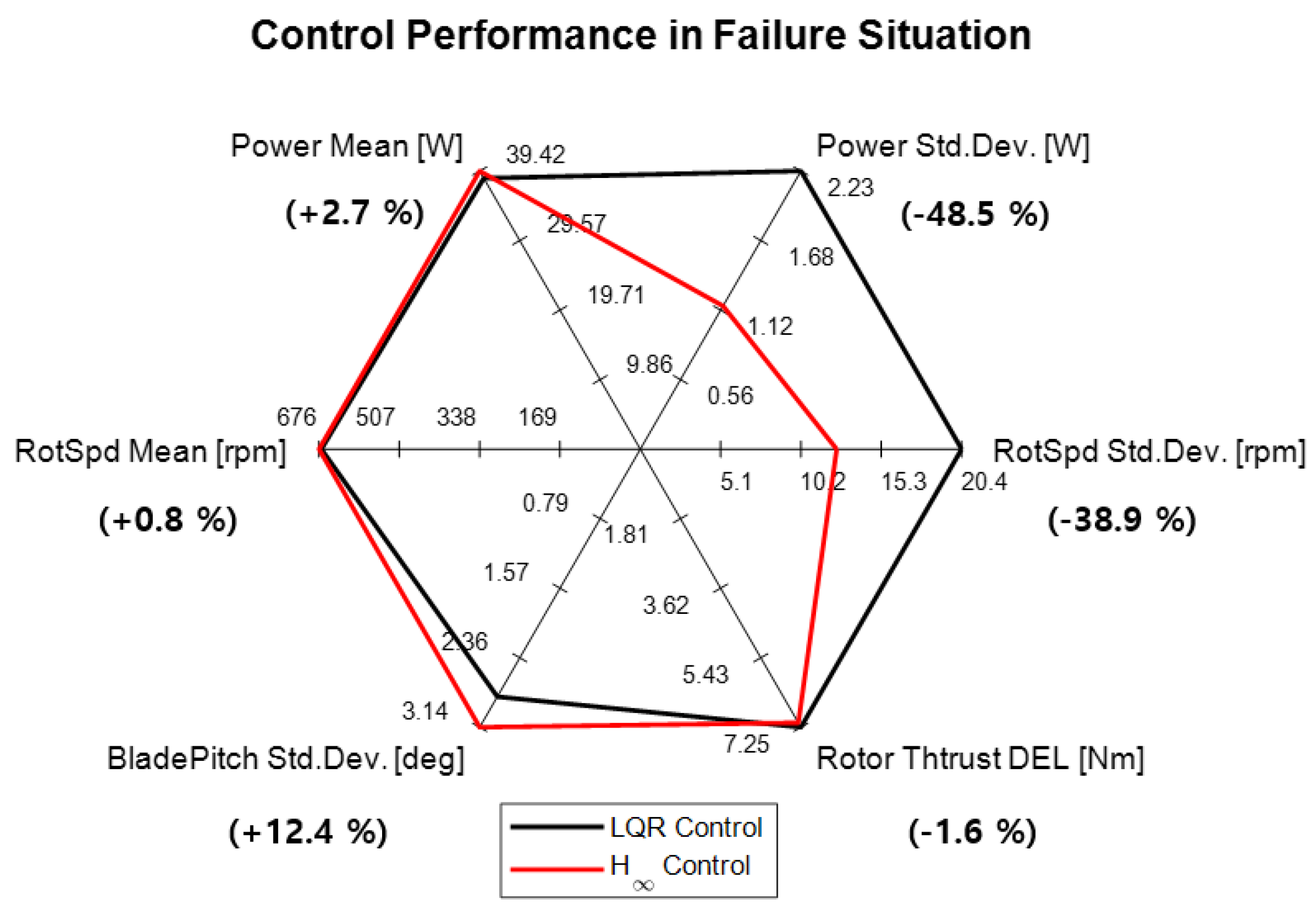
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| State vector | |
| Output vector | |
| Input vector | |
| System matrix | |
| Input matrix | |
| Output matrix | |
| Direct transmission matrix | |
| Aerodynamic torque | |
| Total moment of inertia | |
| Rotor speed | |
| Gear ratio | |
| Generator torque | |
| Mechanical loss torque | |
| Rotor radius | |
| Power coefficient | |
| Tip speed ratio | |
| Pitch angle | |
| Wind speed | |
| Disturbance input | |
| Performance signal | |
| Performance level | |
| Weight function | |
| Augmented plant | |
| Nominal form of augmented plant | |
| Sensitivity function | |
| Controller | |
| Complementary sensitivity function | |
| Membership function for nonlinearity | |
| Sub-optimized control command | |
| Membership function for uncertainty | |
| System decision variable | |
| Generator speed | |
| Pitch angle command | |
| Generator torque command |
Appendix A. Linearization Model

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1. Tower mode 1 displacement | 25. Blade 2 mode 1 displacement | 1. Rotor speed |
| 2. Tower mode 1 velocity | 26. Blade 2 mode 1 velocity | 2. Blade 1 pitch angle |
| 3. Tower mode 2 displacement | 27. Blade 2 mode 2 displacement | 3. Blade 2 pitch angle |
| 4. Tower mode 2 velocity | 28. Blade 2 mode 2 velocity | 4. Blade 3 pitch angle |
| 5. Tower mode 3 displacement | 29. Blade 2 mode 3 displacement | 5. Generator speed |
| 6. Tower mode 3 velocity | 30. Blade 2 mode 3 velocity | 6. Generator torque |
| 7. Tower mode 4 displacement | 31. Blade 2 mode 4 displacement | 7. Nacelle fore-aft acceleration |
| 8. Tower mode 4 velocity | 32. Blade 2 mode 4 velocity | 8. Nacelle nod acceleration |
| 9. Tower mode 5 displacement | 33. Blade 3 mode 1 displacement | 9. Rotor azimuth angle |
| 10. Tower mode 5 velocity | 34. Blade 3 mode 1 velocity | 10. Blade 1 Mx |
| 11. Tower mode 6 displacement | 35. Blade 3 mode 2 displacement | 11. Blade 1 My |
| 12. Tower mode 6 velocity | 36. Blade 3 mode 2 velocity | 12. Blade 1 Mz |
| 13. Rotor rigid body displacement | 37. Blade 3 mode 3 displacement | 13. Tower Mx |
| 14. Rotor rigid body velocity | 38. Blade 3 mode 3 velocity | 14. Tower My |
| 15. Low-speed Shaft displacement | 39. Blade 3 mode 4 displacement | |
| 16. Low-speed Shaft velocity | 40. Blade 3 mode 4 velocity | |
| 17. Blade 1 mode 1 displacement | 41. Generator electrical torque | |
| 18. Blade 1 mode 1 velocity | 42. Blade 1 actuator Position response 1 | Input Vector |
| 19. Blade 1 mode 2 displacement | 43. Blade 1 actuator Position response 2 | 1. wind speed |
| 20. Blade 1 mode 2 velocity | 44. Blade 2 actuator Position response 1 | 2. pitch angle demand |
| 21. Blade 1 mode 3 displacement | 45. Blade 2 actuator Position response 2 | 3. generator torque demand |
| 22. Blade 1 mode 3 velocity | 46. Blade 3 actuator Position response 1 | |
| 23. Blade 1 mode 4 displacement | 47. Blade 3 actuator Position response 2 | |
| 24. Blade 1 mode 4 velocity | ||
Appendix B. Membership Functions and Fuzzy Rules
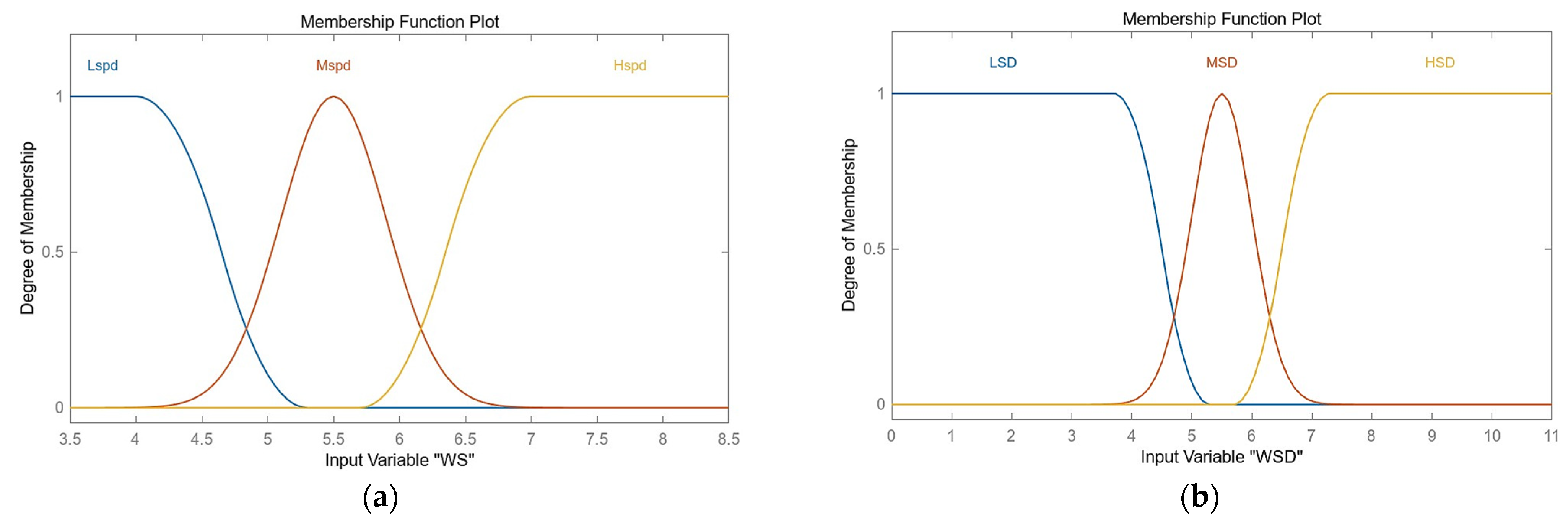
| Lspd | Mspd | Hspd | Lspd | Mspd | Hspd | Lspd | Mspd | Hspd | Lspd | Mspd | Hspd | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LSD | H | LM | L | LM | H | LM | L | LM | H | L | L | L | |
| MSD | H | M | L | M | H | M | L | M | H | M | M | M | |
| HSD | H | MH | L | MH | H | MH | L | MH | H | H | H | H | |
References
- Global Wind Energy Council. GWEC Global Wind Report 2019; Global Wind Energy Council: Bonn, Germany, 2017. [Google Scholar]
- Hurtado, J.P.; Fernández, J.; Parrondo, J.L.; Blanco, E. Spanish method of visual impact evaluation in wind farms. Renew. Sustain. Energy Rev. 2004, 8, 483–491. [Google Scholar] [CrossRef]
- Guo, J.; Lu, S.; Zhai, C.; He, Q. Automatic bearing fault diagnosis of permanent magnet synchronous generators in wind turbines subjected to noise interference. Meas. Sci. Technol. 2018, 29, 025002. [Google Scholar] [CrossRef]
- Elia, A.; Taylor, M.; Gallachóir, B.Ó.; Rogan, F. Wind turbine cost reduction: A detailed bottom-up analysis of innovation drivers. Energy Policy 2020, 147, 111912. [Google Scholar] [CrossRef]
- Rajgor, G. Vestas targets German wind market with ‘world’s tallest onshore tower’. Wind. Mon. 2022. [Google Scholar]
- Dolan, D.S.; Lehn, P.W. Simulation model of wind turbine 3p torque oscillations due to wind shear and tower shadow. IEEE Trans. Energy Convers. 2006, 21, 717–724. [Google Scholar] [CrossRef]
- Shen, X.; Zhu, X.; Du, Z. Wind turbine aerodynamics and loads control in wind shear flow. Energy 2011, 36, 1424–1434. [Google Scholar] [CrossRef]
- Bossanyi, E.A. The design of closed loop controllers for wind turbines. Wind Energy 2000, 3, 149–163. [Google Scholar] [CrossRef]
- Nam, Y. Wind Turbine System Control, 1st ed.; GS Intervision: Seoul, Republic of Korea, 2013. [Google Scholar]
- Do, M.H.; Söffker, D. Wind turbine robust disturbance accommodating control using non-smooth H∞ optimization. Wind Energy 2022, 25, 107–124. [Google Scholar] [CrossRef]
- Turksoy, O.; Ayasun, S.; Hames, Y.; Sönmez, Ş. Computation of robust PI-based pitch controller parameters for large wind turbines. Can. J. Electr. Comput. Eng. 2019, 43, 57–63. [Google Scholar] [CrossRef]
- Hawari, Q.; Kim, T.; Ward, C.; Fleming, J. A robust gain scheduling method for a PI collective pitch controller of multi-MW onshore wind turbines. Renew. Energy 2022, 192, 443–455. [Google Scholar] [CrossRef]
- Beltran, B.; Ahmed-Ali, T.; Benbouzid, M.E.H. High-order sliding-mode control of variable-speed wind turbines. IEEE Trans. Ind. Electron. 2008, 56, 3314–3321. [Google Scholar] [CrossRef]
- De Corcuera, A.D.; Pujana-Arrese, A.; Ezquerra, J.M.; Segurola, E.; Landaluze, J. H∞ based control for load mitigation in wind turbines. Energies 2012, 5, 938–967. [Google Scholar] [CrossRef]
- Moradi, H.; Vossoughi, G. Robust control of the variable speed wind turbines in the presence of uncertainties: A comparison between H∞ and PID controllers. Energy 2015, 90, 1508–1521. [Google Scholar] [CrossRef]
- Pourseif, T.; Atuwwo, T.; Doniqi, S.A.; Andani, M.T.; Yousefpour, K.; Pourgharibshahi, H.; Ramezani, Z. Design of H-infinity controller for wind turbine in the cold weather conditions. In Proceedings of the 2018 Clemson University Power Systems Conference (PSC), Charleston, SC, USA, 4–7 September 2018; pp. 1–6. [Google Scholar]
- Song, Y.; Jeon, T.; Paek, I.; Dugarjav, B. Design and Validation of Pitch H-Infinity Controller for a Large Wind Turbine. Energies 2022, 15, 8763. [Google Scholar] [CrossRef]
- Kharrat, M.; Abderrahim, S.; Allouche, M. Robust H2-Optimal TS Fuzzy Controller Design for a Wind Energy Conversion System. Adv. Mater. Sci. Eng. 2022, 2022, 5428109. [Google Scholar] [CrossRef]
- Xu, B.; Yuan, Y.; Liu, H.; Jiang, P.; Gao, Z.; Shen, X.; Cai, X. A pitch angle controller based on novel fuzzy-PI control for wind turbine load reduction. Energies 2020, 13, 6086. [Google Scholar] [CrossRef]
- Jeon, T.; Paek, I. Design and verification of the LQR controller based on fuzzy logic for large wind turbine. Energies 2021, 14, 230. [Google Scholar] [CrossRef]
- Jeon, T.; Kim, D.; Song, Y.; Paek, I. Design and Validation of Demanded Power Point Tracking Control Algorithm for MIMO Controllers in Wind Turbines. Energies 2021, 14, 5818. [Google Scholar] [CrossRef]
- Jonkman, J.; Butterfield, S.; Musial, W.; Scott, G. Definition of a 5-MW Reference Wind Turbine for Offshore System Development; National Renewable Energy Lab. (NREL): Golden, CO, USA, 2009. [Google Scholar]
- Jeon, T.; Kim, D.; Paek, I. Improvements to and Experimental Validation of PI Controllers Using a Reference Bias Control Algorithm for Wind Turbines. Energies 2022, 15, 8298. [Google Scholar] [CrossRef]
- Bottasso, C.L.; Campagnolo, F.; Petrović, V. Wind tunnel testing of scaled wind turbine models: Beyond aerodynamics. J. Wind. Eng. Ind. Aerodyn. 2014, 127, 11–28. [Google Scholar] [CrossRef]
- Campagnolo, F.; Petrovic, V.; Nanos, E.M.; Tan, C.W.; Bottasso, C.L.; Paek, I.; Kim, H.; Kim, K. Wind tunnel testing of power maximization control strategies applied to a multi-turbine floating wind power platform. In Proceedings of the 26th International Ocean and Polar Engineering Conference, ISOPE-I-16-307, Rhodes, Greece, 26 June–1 July 2016. [Google Scholar]
- Van der Hooft, E.L.; van Engelen, T.G. Feed Forward Control of Estimated Wind Speed; ECN-C-03-137; Energy Research Contre of The Netherlands (ECN): Petten, The Netherlands, 2003.
- Gu, D.-W.; Petkov, P.; Konstantinov, M.M. Robust Control Design with MATLAB; Springer Science & Business Media: London, UK, 2005; ISBN 978-1-4471-4681-0. [Google Scholar]
- Skogestad, S.; Postlethwaite, I. Multivariable Feedback Control—Analysis and Design; Wiley: Hoboken, NJ, USA, 2005. [Google Scholar]
- Shahravanmehr, S.; Fakharian, A. LQG controller based on fuzzy logic to control the power of wind turbine. In Proceedings of the 2015 IEEE 10th Conference on Industrial Electronics and Applications (ICIEA), Auckland, New Zealand, 15–17 June 2015; IEEE: Auckland, New Zealand, 2015; pp. 1548–1553. [Google Scholar]
- Mathworks Incorporated; Wang, W. Fuzzy Logic Toolbox: For Use with MATLAB: User’s Guide; Mathworks Incorporated: The Natick Mall, MA, USA, 1998. [Google Scholar]


| Specifications | Values |
|---|---|
| Rated Power | 40 W |
| Rated Rotor Speed | 678 rpm |
| Rated Generator Torque | 0.04 Nm |
| Gear Ratio | 14 |
| Rotor Diameter | 1.1 m |
| Hub Height | 0.9 m |
| Cut-in/Rated/Cut-out Wind Speed | 3, 5.5, 9 m/s |
| Operating Region | Wind Turbine Controller | Control Performance in Dynamic Simulation | ||||
|---|---|---|---|---|---|---|
| Mean | Std. Dev. | DEL | ||||
| Below-Rated Region | PI (A) | 541.024 | 20.476 | 38.772 | 4.294 | 8.496 |
| LQR (B) | 540.947 | 20.494 | 38.457 | 4.353 | 8.247 | |
| (C) | 540.376 | 20.474 | 37.944 | 4.306 | 8.222 | |
| (B − A)/A (%) | −0.014 | 0.088 | −0.812 | 1.374 | −2.931 | |
| (C − A)/A (%) | −0.120 | −0.010 | −2.136 | 0.279 | −3.225 | |
| Above-Rated Region | PI (D) | 677.719 | 39.696 | 17.875 | 0.998 | 22.852 |
| LQR (E) | 677.941 | 39.709 | 9.770 | 0.471 | 19.832 | |
| (F) | 678.503 | 39.742 | 6.738 | 0.396 | 19.644 | |
| (E − D)/D (%) | 0.033 | 0.033 | −45.343 | −52.806 | −13.215 | |
| (F − D)/D (%) | 0.116 | 0.116 | −62.305 | −60.321 | −14.038 | |
| Operating Region | Wind Turbine Controller | Control Performance in Wind Tunnel Experiments | ||||
|---|---|---|---|---|---|---|
| Mean | Std. Dev. | DEL | ||||
| Below-Rated Region | PI (A) | 524.240 | 18.595 | 20.289 | 1.760 | 3.464 |
| LQR (B) | 528.132 | 18.428 | 20.131 | 1.812 | 3.282 | |
| (C) | 527.759 | 18.404 | 19.940 | 1.794 | 3.275 | |
| (B − A)/A (%) | 0.742 | −0.898 | −0.779 | 2.955 | −5.254 | |
| (C − A)/A (%) | 0.671 | −1.027 | −1.720 | 1.932 | −5.456 | |
| Above-Rated Region | PI (D) | 678.087 | 39.749 | 29.900 | 2.494 | 11.330 |
| LQR (E) | 677.839 | 39.947 | 21.113 | 1.706 | 9.112 | |
| (F) | 678.856 | 39.714 | 12.683 | 1.160 | 8.896 | |
| (E − D)/D (%) | −0.037 | 0.498 | −29.388 | −31.596 | −19.576 | |
| (F − D)/D (%) | 0.113 | −0.088 | −57.582 | −53.488 | −21.483 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeon, T.; Song, Y.; Paek, I. A Study on H∞-Fuzzy Controller for a Non-Linear Wind Turbine with Uncertainty. Appl. Sci. 2023, 13, 11930. https://doi.org/10.3390/app132111930
Jeon T, Song Y, Paek I. A Study on H∞-Fuzzy Controller for a Non-Linear Wind Turbine with Uncertainty. Applied Sciences. 2023; 13(21):11930. https://doi.org/10.3390/app132111930
Chicago/Turabian StyleJeon, Taesu, Yuan Song, and Insu Paek. 2023. "A Study on H∞-Fuzzy Controller for a Non-Linear Wind Turbine with Uncertainty" Applied Sciences 13, no. 21: 11930. https://doi.org/10.3390/app132111930
APA StyleJeon, T., Song, Y., & Paek, I. (2023). A Study on H∞-Fuzzy Controller for a Non-Linear Wind Turbine with Uncertainty. Applied Sciences, 13(21), 11930. https://doi.org/10.3390/app132111930