In this section, a case study and algorithm validation are performed to prove the effectiveness of the proposed BSO method. All of the models and algorithms are coded in MATLAB and run on a server with a 2.8 GHz CPU and 16.0 GB of RAM.
5.2. Effects of Swarm Sizes
To explore the effects of the different swarm sizes on the proposed BSO method, the other two core parameters, including the dimension of each individual and the number of iterations, are set as 15 and 100, respectively. The normalized path risk, turning angle, path length, and total cost are selected as indicators to evaluate the algorithm’s performance. The generated UAV paths in a given 2D environment are also provided. Comparisons are made with PSO, GA, FA, and standard BAS algorithms.
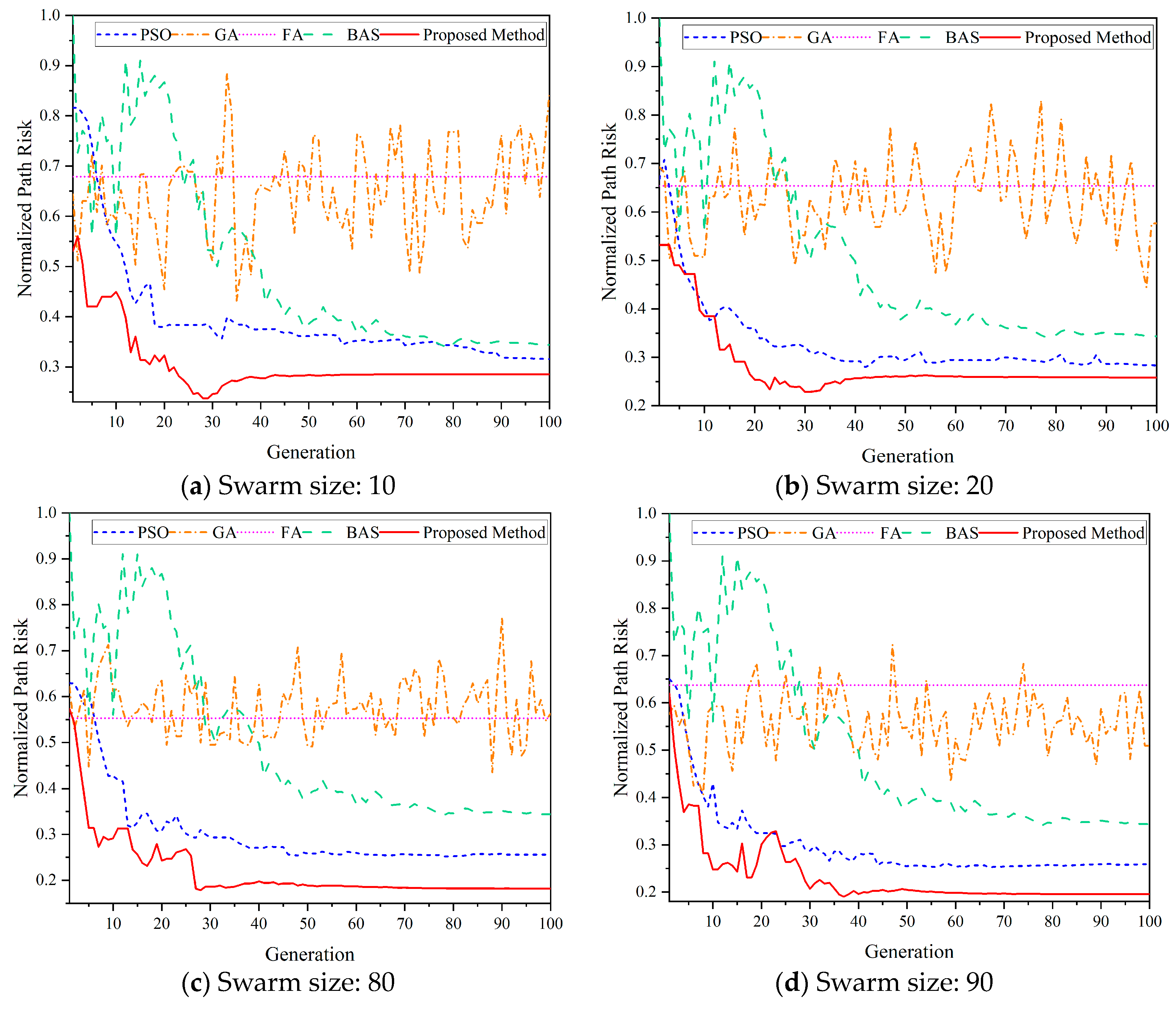
Figure 8 shows the effects of the swarm sizes on the UAV path risk. The numbers of the individuals in a swarm are set as 10, 20, 80, and 90. Comparisons are made with the other four existing methods, including PSO, GA, FA, and standard BAS. It should be noted that there is only one beetle in standard BAS. As a result, it cannot be affected by the swarm size. As shown in
Figure 8, GA fluctuates the most from the first iteration to the end, regardless of how many individuals exist. For GA, it is difficult to locate the global optimum solutions in the search space. However, for FA, it is a straight line from the beginning to the end. It means the risk of a generated UAV path is the same, which illustrates that FA falls into a local optimum in this scenario. Oppositely, standard BAS, PSO, and the proposed BSO method could find the optimum solutions as the iteration goes on. However, there are a lot of fluctuations for standard BAS at the beginning of a few iterations, and it stays stable after 80 iterations. The highest risk of these five algorithms is produced by standard BAS. The risk of a path generated by PSO keeps going down and becomes stable after 70 iterations. The convergence of the proposed BSO method is the quickest and could find the global optimum solution before the 40th iteration. Also, the risk of the UAV path generated by the proposed BSO method is the lowest. Actually, the swarm size could generate quite limited effects on the proposed BSO method, which means that it could work well with the fastest convergence rate and the lowest path risk. Specifically, when there are 90 individuals in a swarm, the path risk of the proposed BSO method is 24.40%, 61.58%, 69.29%, and 43.08% lower than that of PSO, GA, FA, and standard BAS.
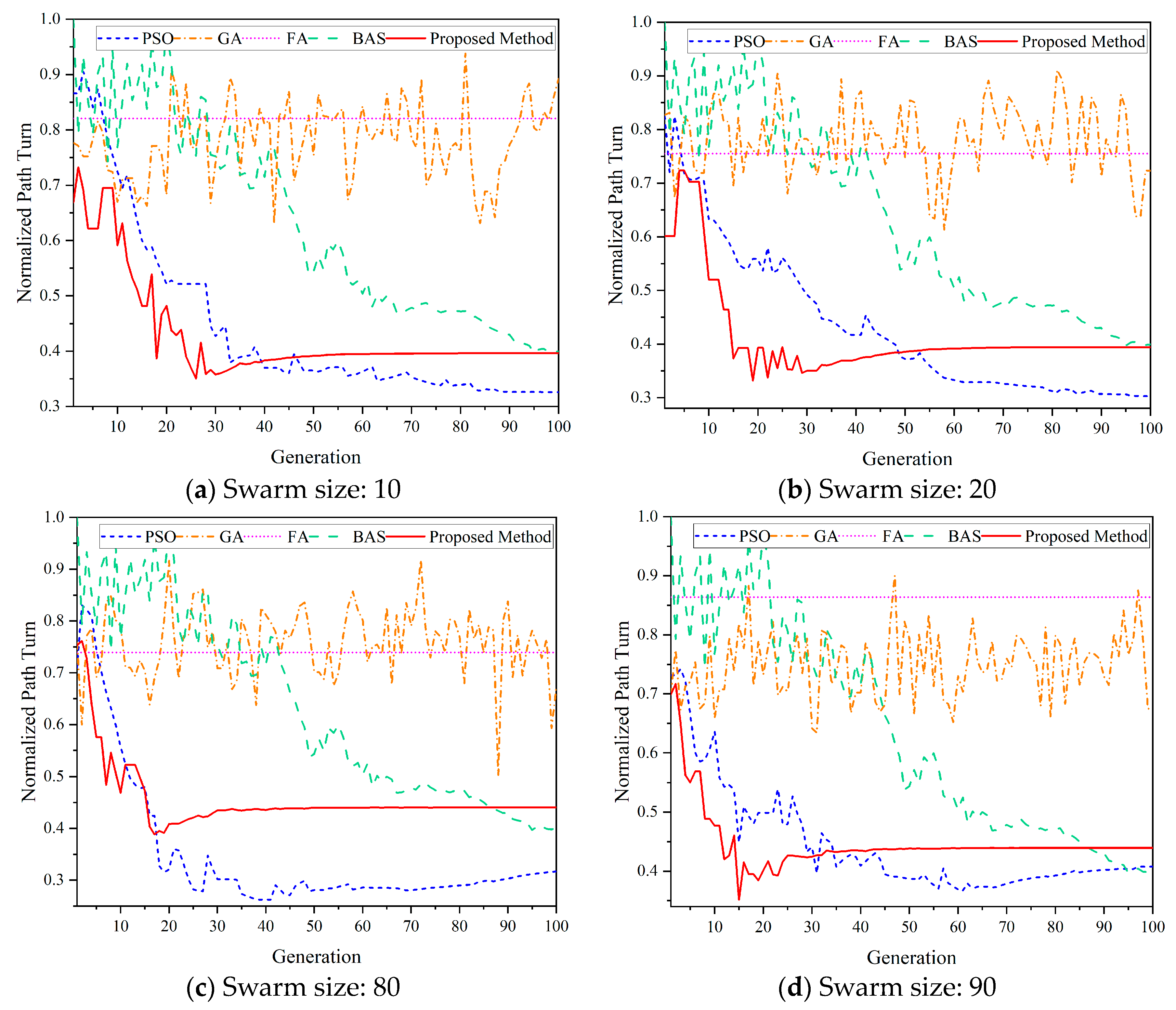
Figure 9 shows the effects of the swarm sizes on the turning angles. It is known that the path should be as straight as possible for the UAVs to follow, and smaller turning angles on a UAV path are desired. In
Figure 9, for GA and FA, the two algorithms cannot locate the global best solutions in the given iterations. GA fluctuates violently until the last iteration. FA falls into a local optimum and cannot get out. Thus, the sums of the turning angles of FA become the biggest. For standard BAS with different swarm sizes, there are many fluctuations before 45 iterations. It is because only one beetle exists to find the optimum solutions, which makes the swarm social information quite limited, and it cannot be shared. PSO works well and can find the global best solution successfully. However, its convergence rate is much slower than that of the proposed BSO method in all the circumstances. Usually, more than 50 iterations are needed for PSO to find the best solutions.
There is no doubt that the proposed BSO method could converge within 30 iterations. Especially when the swarm size is 80, only about 20 iterations are needed. Interestingly, the final optimum turning angles of a path generated by the proposed BSO method are larger than that of PSO. It is even larger than that of standard BAS when the swarm size is set as 80 and 90, respectively. That is because the overall global optimum solutions are obtained by sacrificing the turning angles when the path is generated using the proposed BSO method. In some situations, the priority of the effective factors should be higher than the turning angles within the limitations of the UAVs themselves, such as the path risk, path length, and path smoothness. If the turning angles are on an accepted level, it will be alright for the UAVs to follow.
Figure 10 shows the effects of different swarm sizes on the path length. It is obvious that the path length of the proposed BSO is the shortest, no matter how many individuals there are in a swarm. Meanwhile, the rate of convergence is the fastest of all, which further proves that the global best solutions could be found within 30 iterations in all kinds of conditions compared with algorithms.
As shown in
Figure 10, when the swarm size is larger than 20, PSO works better than standard BAS. If there are fewer individuals in a swarm, for example, the swarm size is 10, the path generated by standard BAS is better with a shorter flying distance after the 75
th iteration. GA and FA are worse than the other three. For FA, it will fall into the local optimum quickly when it starts, which leads to the path length staying the same with no changes. It also proves that FA could only provide one flying path when it runs, which may not be the best. Oppositely, for GA, there are a lot of drastic fluctuations in the UAV path length in the optimization process. This is because the GA algorithm is always trying to locate the optimum solutions, but it ultimately fails. The biggest difference in the path length of the five algorithms appears in
Figure 10a. Based on the data provided in
Figure 10, we can see that when the swarm size is set as 10, the proposed BSO method is 27.75%, 66.51%, 64.31%, and 23.20% better than PSO, GA, FA, and standard BAS, respectively.
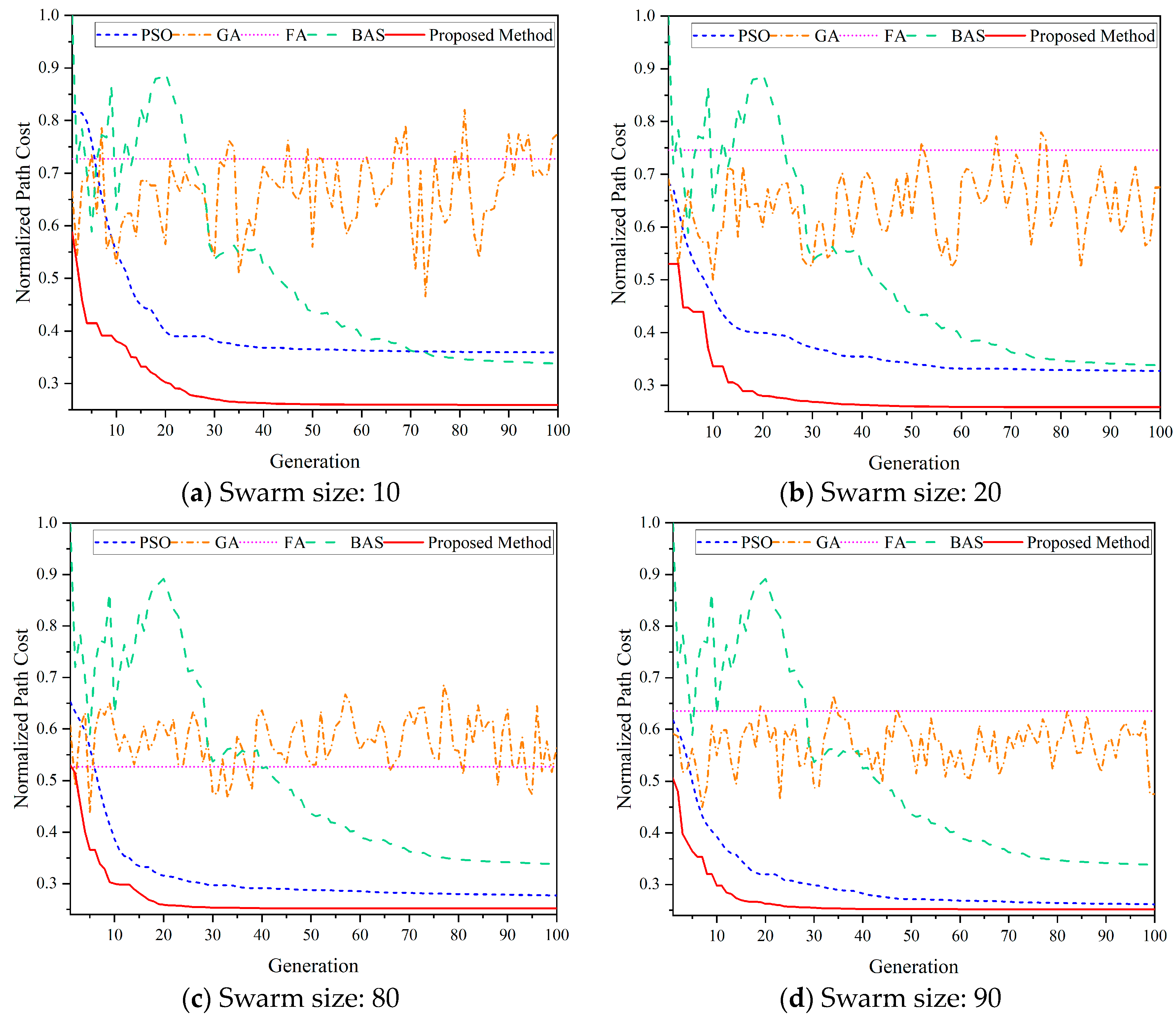
The overall cost of a generated UAV path, including the ground risk, turning angles, and path lengths, is shown in
Figure 11. From the figures, we can see that the path cost of the proposed BSO method is the lowest under all kinds of swarm size settings. It converges quickly and locates the global optimum solutions within 20 iterations. After that, it becomes the smoothest of the five. Combined with
Figure 9, it can be concluded that the proposed BSO algorithm obtains a UAV path with the lowest overall cost by sacrificing the larger turning angles, which is satisfied with the UAV’s performance limitations. PSO performs similarly to the proposed BSO method. However, its rate of convergence is much lower, and as a result, more iterations are needed. The path cost of PSO is higher than that of the proposed BSO method under all the conditions of different swarm sizes. The biggest difference is as much as 27.74% when the swarm size is set as 10.
From
Figure 11, for standard BAS, at the beginning of a few iterations, there are a lot of fluctuations, and it becomes much smoother after 40 iterations, regardless of the swarm sizes. It is because only one beetle in standard BAS could not determine the optimum search directions because of the lack of global information. In this way, more iterations are needed. When the number of individuals in the swarm is 10, the overall path cost of standard BAS is better than that of PSO after 75 iterations, which is improved by 5.92%. It means that PSO is highly affected by the swarm size and can only work well with more individuals. Based on the given path cost, GA still cannot locate the global best waypoints. It always fluctuates from position to position. GA would have a strong randomness, which makes it hard to plan an optimal flying path for the UAVs. Similarly, FA easily falls into the local optimum at the beginning and until the end. The path it generates may not be the best, although a flying path is indeed obtained. It may be suitable for the UAVs to follow but with a much higher cost compared with PSO, standard BAS, and the proposed BSO method in this scenario.
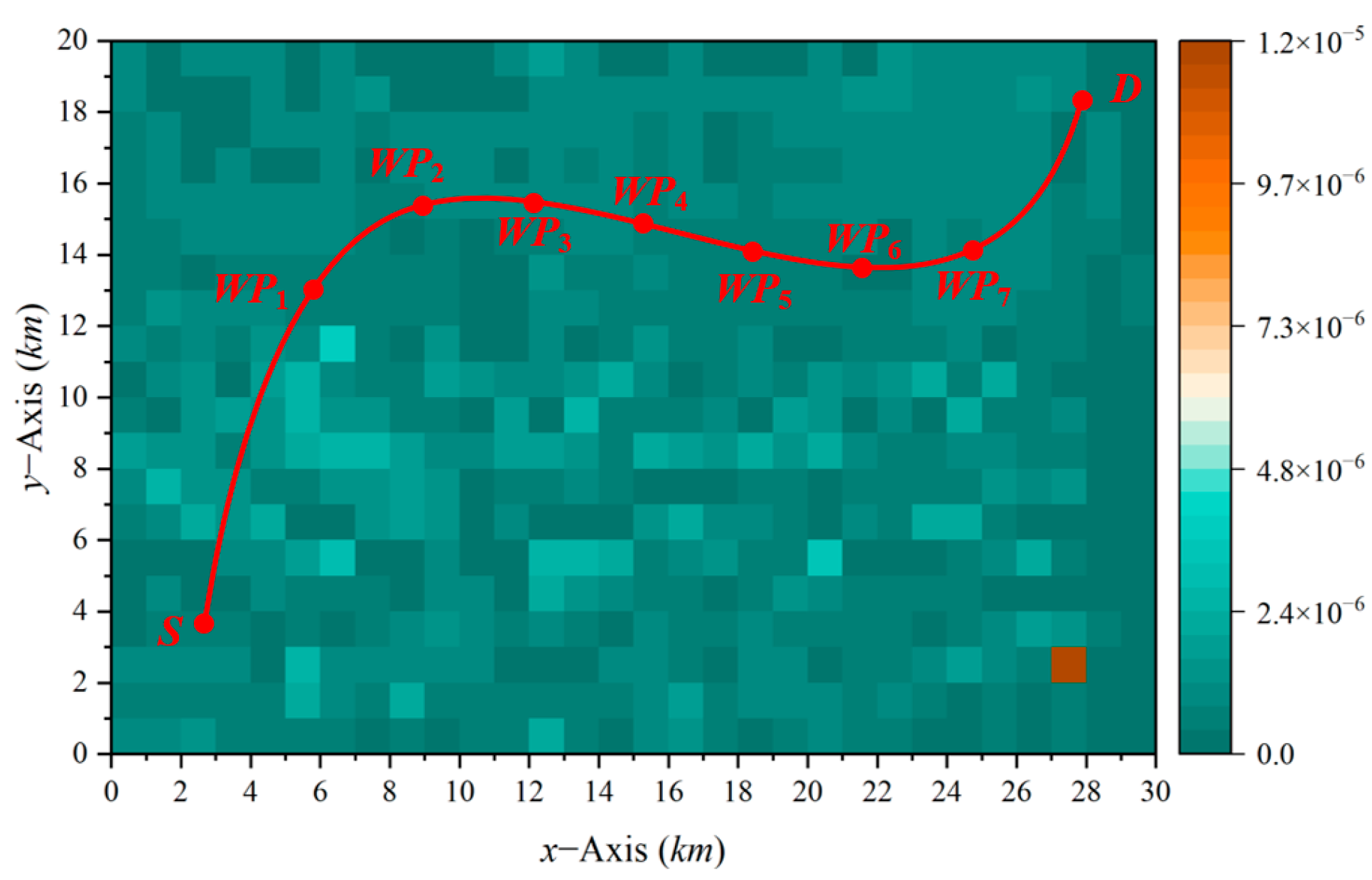
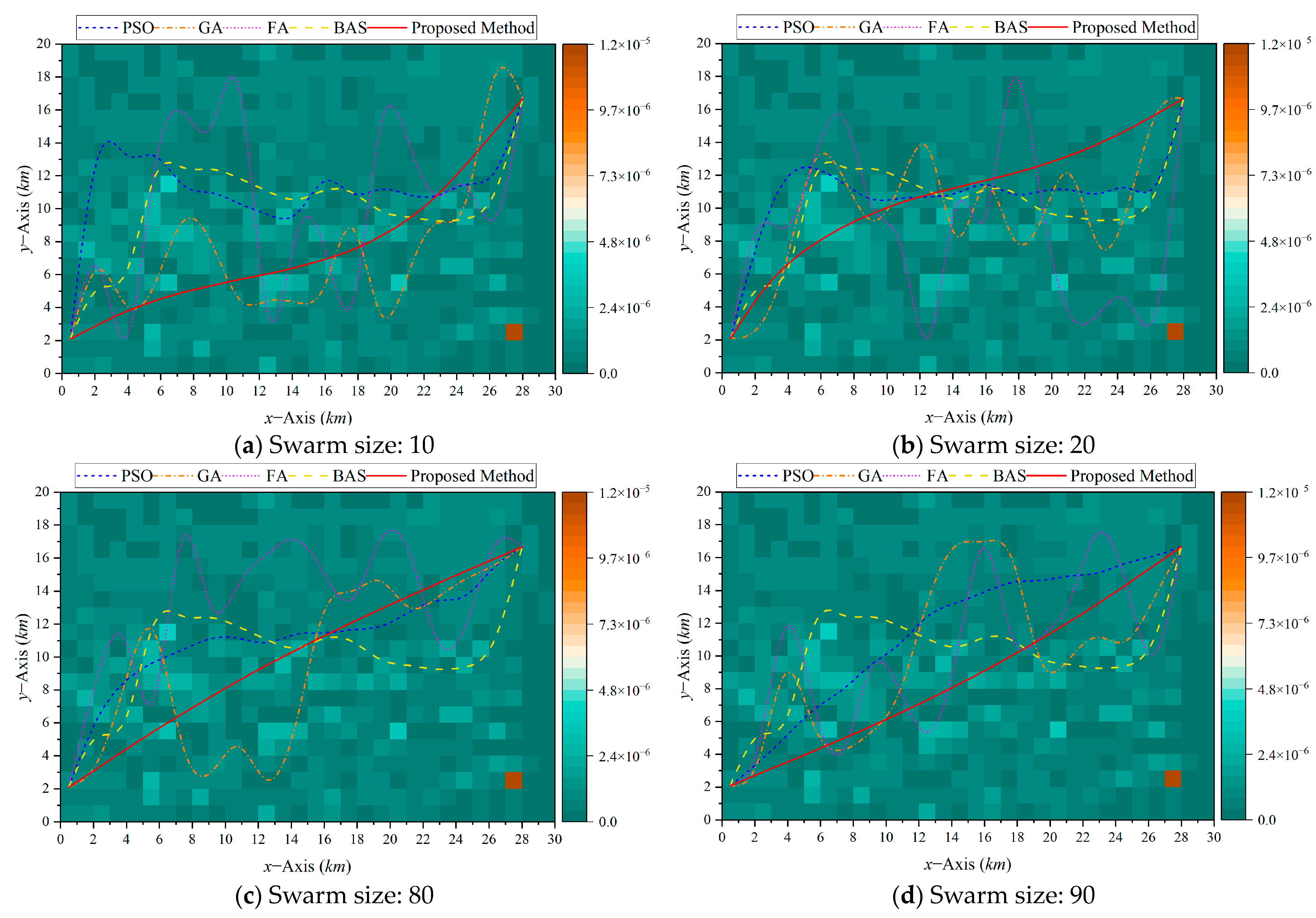
The generated UAV paths in a 2D environment by the five algorithms concerning a ground risk map are provided in
Figure 12 with different swarm sizes. Theoretically, an optimum UAV path should avoid the ground areas with high risk to make the ground people as safe as possible. As shown in
Figure 12, when the swarm size is 10, FA jumps all the time from the beginning to the end. If the UAVs follow the paths provided by FA, they have to turn a lot and frequently. GA is better than FA, with fewer troughs and peaks of waves. PSO and standard BAS are similar to some extent, both of which are much smoother than GA and FA. When there are 20 individuals in a swarm, GA and FA do not change a lot, but there are still many fluctuations. Standard BAS stays the same in the four parameter settings because the swarm size can not affect it at all. PSO becomes more gentle as the swarm size becomes larger and larger. However, the proposed BSO method in this work performs the best with fewer turns on the path and when it is much closer to a straight line that connects the starting point
S and destination point
D in the operation scenario. It is such an expected situation that it is desirable for the UAVs to follow easily and safely.
Based on the provided paths in
Figure 12, when the swarm size is set as 80 and 90, respectively, the path generated by the proposed BSO method becomes an approximate straight line. It is not only easy for the UAVs to follow it, but it also has a short length to save energy consumption significantly. PSO works a little better with more individuals. The larger swarm sizes would normally make it locate more accurate solutions. Furthermore, GA and FA could also find better waypoints with the help of more individuals. It is obvious that the fluctuations of the two decrease, which means there are fewer turns on the path, which makes it suitable for the UAVs to follow.
5.3. Effects of Individual Dimensions
In this subsection, the effects of the different individual dimensions in a swarm are explored and presented, which are set as 15, 20, 25, and 30. The swarm size and the number of iterations are set as 20 and 100, respectively.
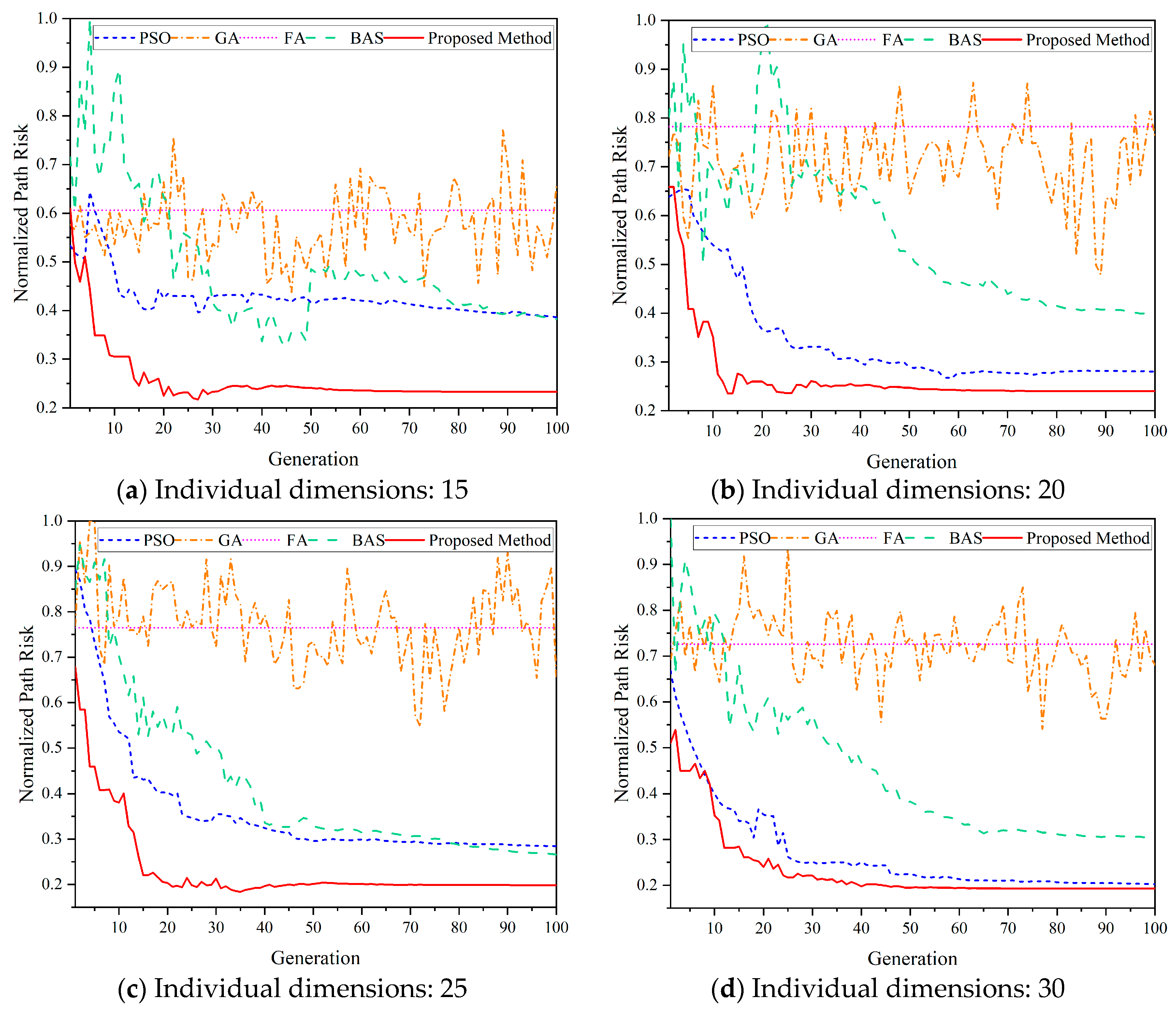
Figure 13 illustrates how the path risk can be affected by the individual dimensions. There is no doubt that the proposed BSO method could generate a path with the lowest risk, no matter what the individual dimensions are. Also, the rate and efficiency of convergence are the best of the five. The global optimum waypoints are found within 50 iterations. PSO can provide a sub-optimum solution compared with the proposed BSO method, which produces a higher path risk on the ground. The convergence rate and efficiency of PSO are both worse than those of the proposed BSO method. There are more fluctuations on the ground risk curves given by standard BAS, especially in the first few iterations. But it will be improved as the higher individual dimensions are set. The ground risk of a UAV path produced by standard BAS is higher than that produced by PSO. But when the individual dimension is 15, the path risk of standard BAS is a little lower than that of PSO in the 100th iteration. GA and FA are the worst of all under all the conditions. It is difficult for GA to locate the optimum solutions. FA falls into the local optimum and cannot get out in the whole optimization process.
Based on the data in
Figure 13, the path risk of the proposed BSO method is 39.72%, 64.90%, 61.58%, and 39.04% lower than that of PSO, GA, FA, and standard BAS with the individual dimensions of 15, which proves the proposed BSO method is quite suitable for the limited individual dimensions.
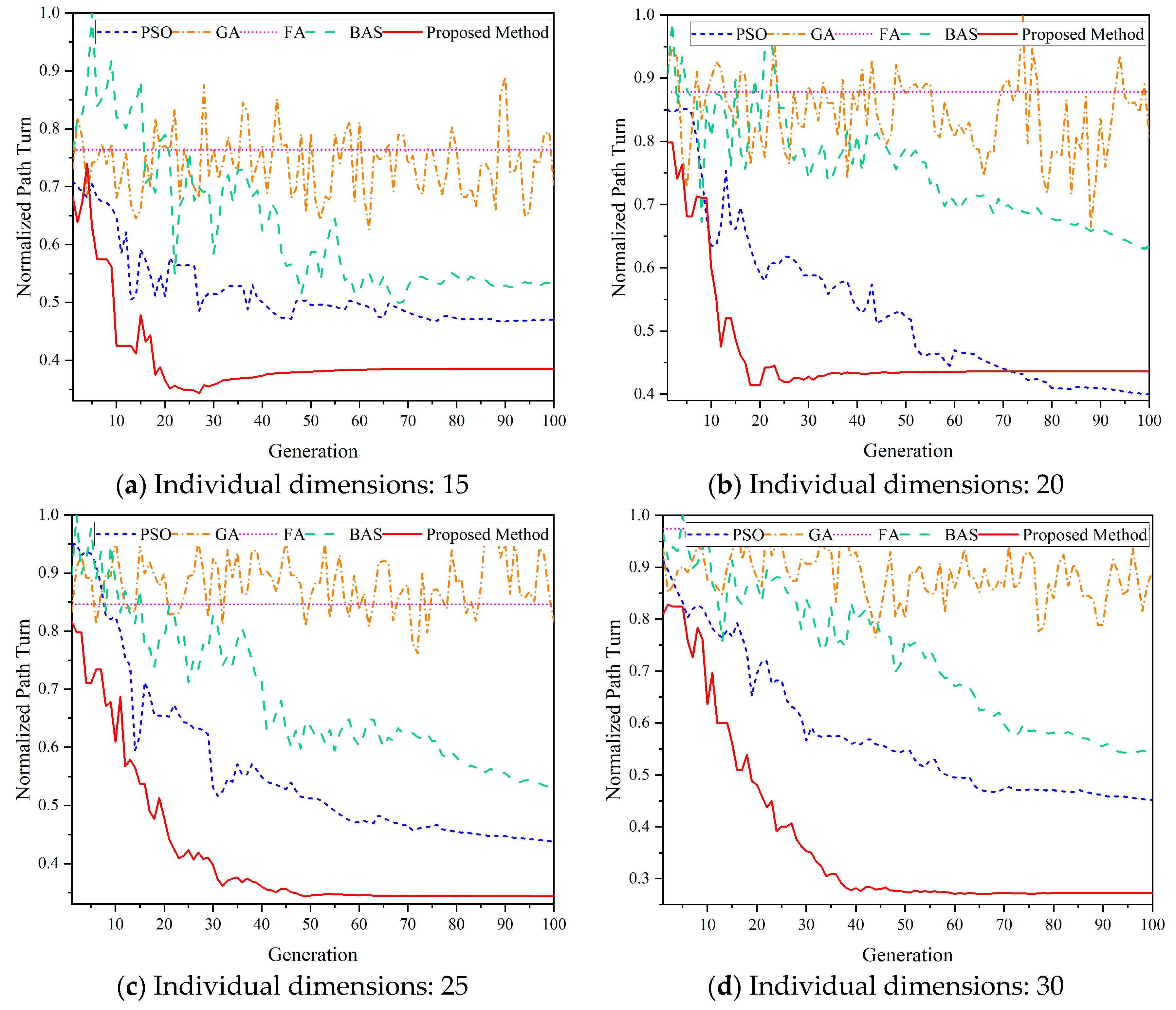
Figure 14 shows the sum of the turning angles on the generated UAV paths with the different individual dimension settings.
It is obvious that when the dimensions are set as 15, 25, and 30, the turning angles of the proposed BSO method are the best. However, PSO is a little better than BSO under the condition of the individual dimension of 20 after the 72
nd iteration. Combined with the results provided in
Figure 9, the turning angles are used to offset the path risk to guarantee the safety of the people on the ground, which is satisfied with the optimization objectives. PSO is worse than the proposed BSO method but better than the other three, with much fewer turning angles. The individual dimension generates a great number of effects on standard BAS. The high dimensions would make it more efficient and converge quickly. From the figure, we can see that both GA and FA fail to find the global best waypoints. GA fluctuates acutely from the beginning to the end, with a lot of turnings on the generated path. FA falls into the local optimum in the first iteration. The biggest improvements of the proposed BSO method are 39.72%, 69.40%, 72.04%, and 50.20% better compared with PSO, GA, FA, and standard BAS with an individual dimension of 30.
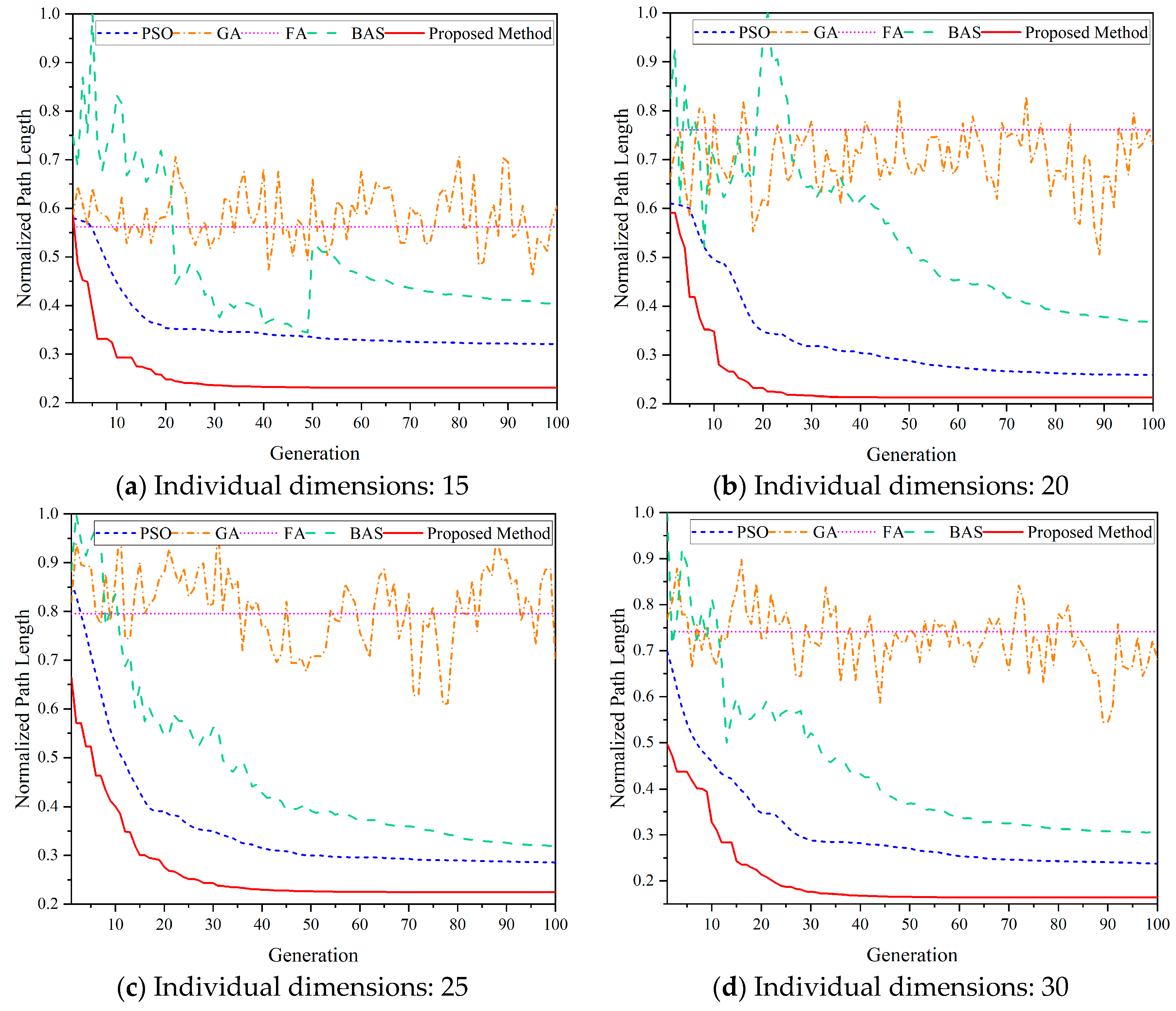
The path lengths of the five different algorithms are provided in
Figure 15. GA and FA are the worst of all. GA fluctuates frequently to try to find the best solutions all the time. But it cannot even get closer to the best positions in the search space. In this way, the global best cannot be found but with a lot of fluctuations in the search process. FA falls into the local optimum at the beginning and would not change at all. The path lengths of the two are the longest In the last Iteration. Standard BAS, PSO, and the proposed BSO method present the same downward trends. However, standard BAS will jump a lot in the first few iterations because only one beetle exists to locate the optimum solutions, which makes it inefficient and impossible. PSO can calculate the positions of the best waypoints with higher efficiency and quicker convergence. But it is worse than the proposed BSO method. By using the proposed BSO, the global best can be found only within 30 iterations, as well as the shortest path lengths. Even with the lowest individual dimension of 15, the proposed BSO method is still 28.10%, 61.79%, 58.95%, and 42.72% better than PSO, GA, FA, and BAS in the UAV path length, respectively.
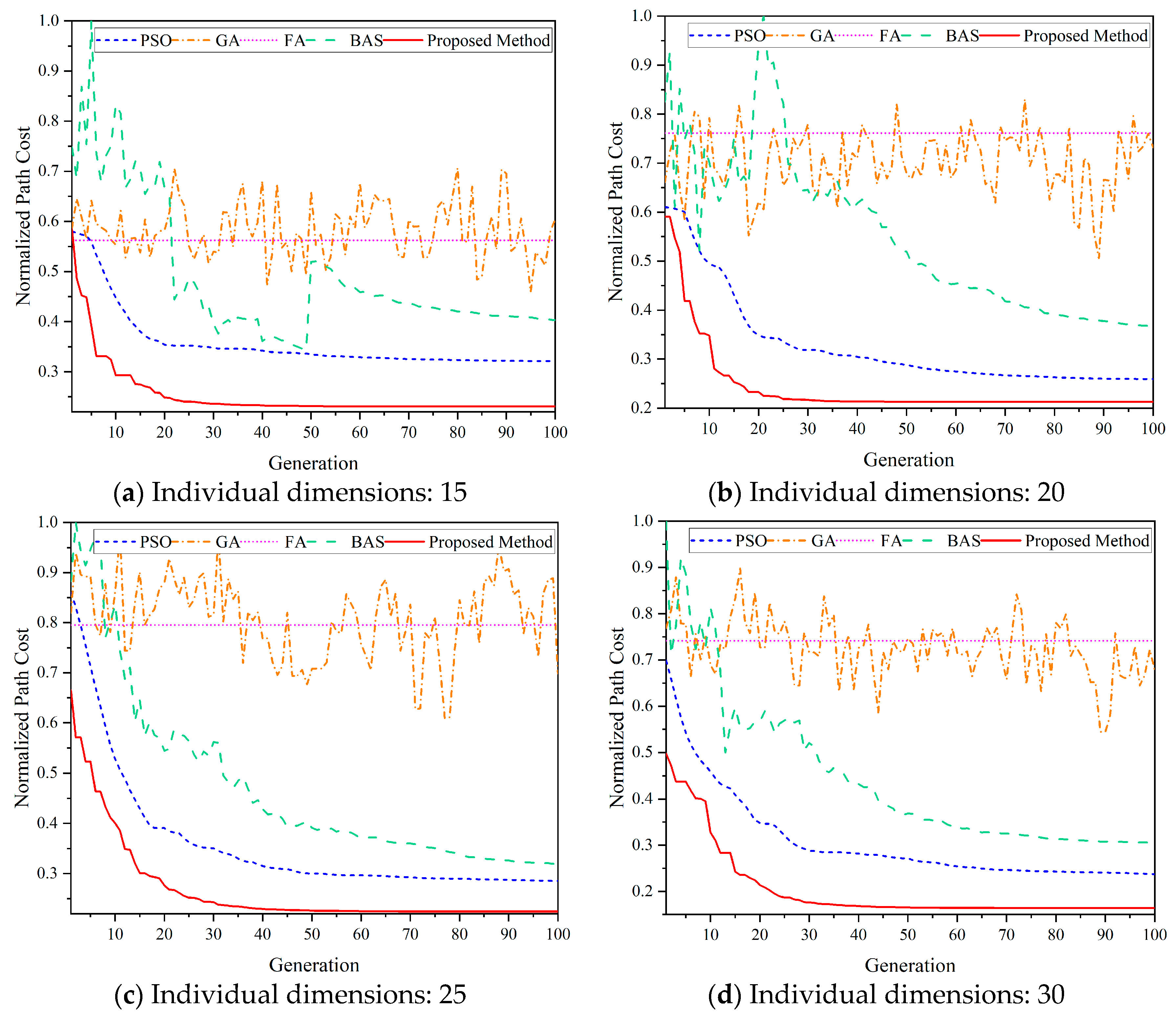
The overall cost of the generated paths by the five algorithms is provided in
Figure 16. From all the curves, we can see that our proposed BSO method works well under all the individual dimension settings with the minimum path cost. Also, the optimal waypoints can be found as soon as possible once it starts running. Particularly when the individual dimension is set as 20, only 30 iterations are needed to locate the global best solutions. It is smooth enough that there are no big fluctuations in the cost curves in all the circumstances.
From
Figure 16, we can see that PSO works as stably as the proposed BSO method. However, the path cost it generates is more than that of the proposed method, which is much better than the other three with the lower cost and the quicker convergence. Standard BAS would go through a lot of ups and downs in the first few iterations to find the correct optimization fields. However, when the dimensions of the beetle get higher, such as 25 and 30, the ups and downs would be fewer and fewer. Even though the final cost is a little more than that of PSO, 11.52% and 28.51%, respectively, with the dimensions of 25 and 30. GA and FA are the worst of all. For FA, it falls into the local optimum so easily that the cost of the UAV path will not change after the iteration starts. However, there is so much randomness during the optimization of GA. In this way, ups and downs would exist in the whole optimization process. GA cannot find optimum solutions, which is not suitable to solve continuity problems like this. When the individual dimension is set as 30, the proposed BSO method is 31.00%, 75.86%, 77.87%, and 46.31% better than PSO, GA, FA, and standard BAS in the normalized path cost.
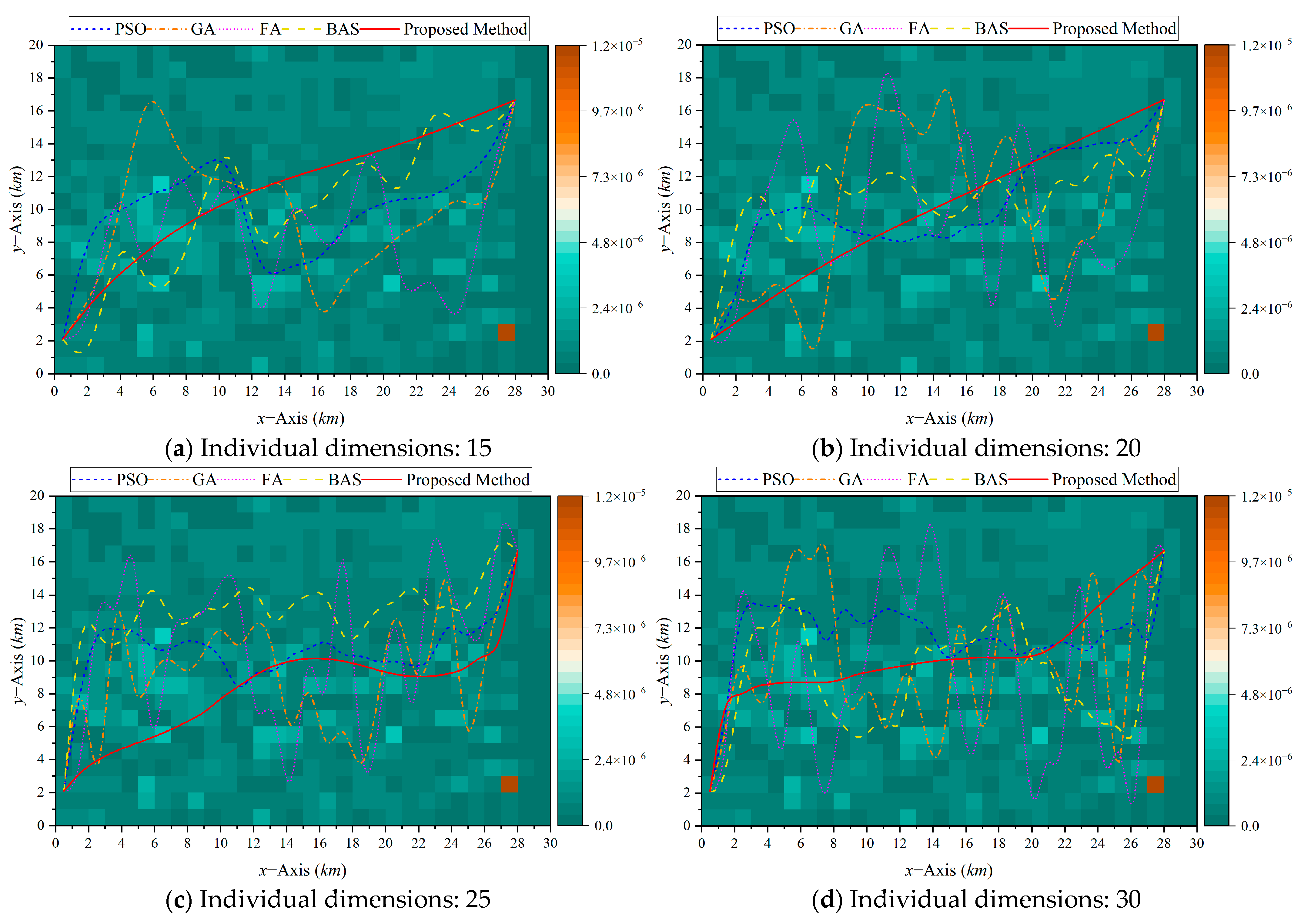
The generated UAV paths are provided in
Figure 17. From this figure, it can be seen that all the listed five algorithms could generate the paths for the UAVs, but with quite different smoothness and fluctuations. It is desirable to keep the paths as smooth as possible so that the UAVs can easily follow them. In this way, it is obvious that the path provided by the proposed BSO method is the smoothest under all the conditions with the fewest turns on the paths. Especially when the individual dimension is 20, the given path is nearly a straight line that connects the starting point
S and destination point
D directly.
As
Figure 17 shows, we can see that the higher individual dimensions would generate very negative effects, which correspondingly bring more turns. PSO could find an optimal flying path for the UAVs under all the settings. But there are more turns on the path compared with the proposed BSO method. Especially when the dimension is 30, the path of PSO is the most fluctuant compared with others. All the UAVs have to turn all the time to achieve a lower path cost. Standard BAS is in the middle position, which is better than GA and FA but worse than the proposed BSO method and PSO. The corresponding amplitudes of the variations are much better than GA and FA. Obviously, FA is the worst, which jumps all the time from the beginning to the end, trying to make the path cost the global optimum. Combined with the previous results, this is caused by the local optimum problem. No more better waypoints can be provided. GA presents similar characteristics to FA, but the amplitude of the fluctuation is a little smaller because GA is always trying to locate an optimum solution, even though it fails in the end. Oppositely, the quality of GA’s solution is higher than that of FA’s. In this way, the path given by GA is much smoother than FA.
5.4. Effects of Iterations
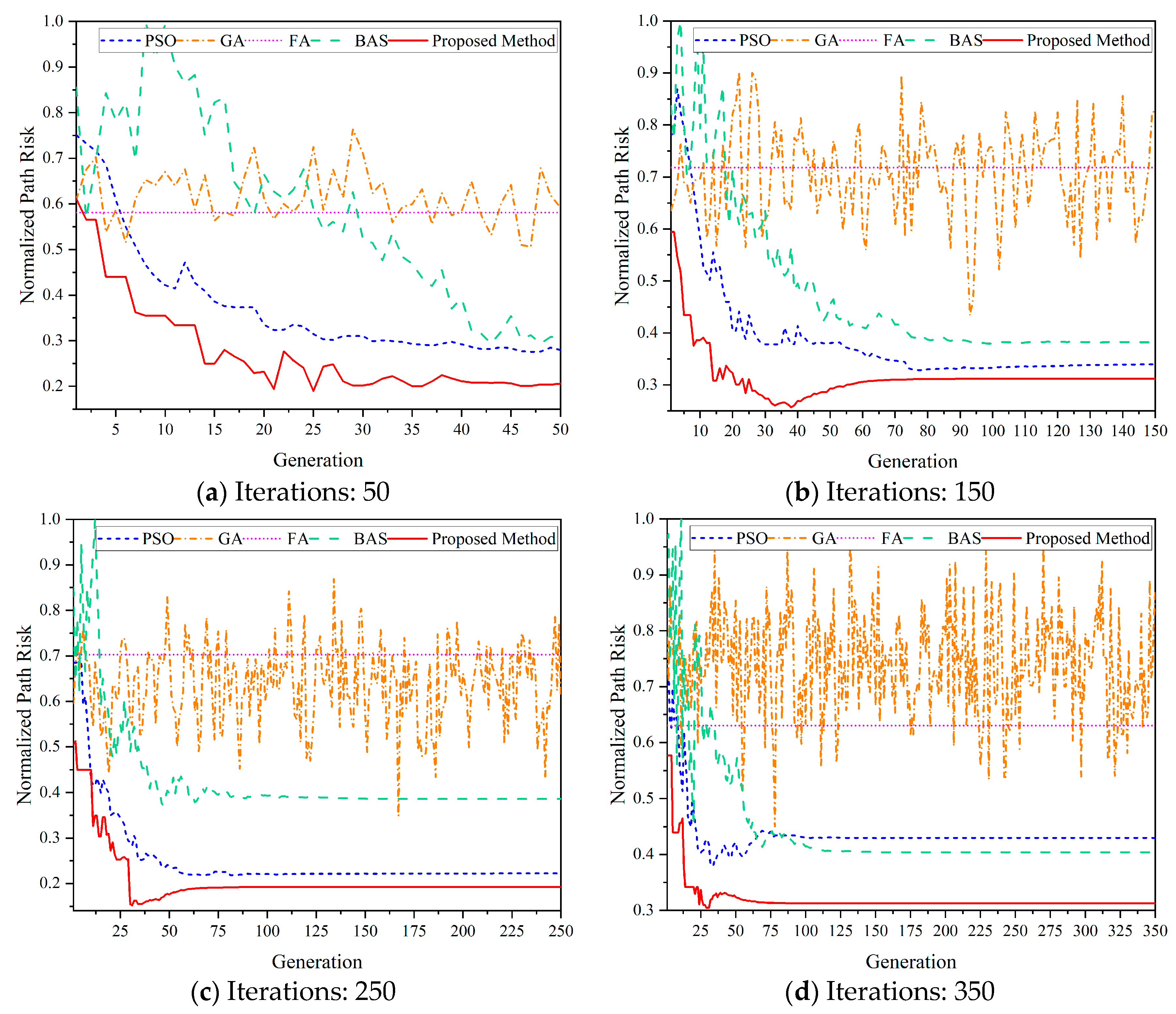
In order to explore the convergence rate of the proposed BSO method, the effects of the different numbers of iterations are analyzed in this subsection. In these simulations, the numbers of the algorithm iterations are set as 50, 150, 250, and 350, respectively. Still, the path risk, turning angle, path length, total path cost, and generated UAV paths are the indexes that are used to evaluate the performances of the algorithms.
Figure 18 presents the normalized risk of the generated UAV paths under the different iteration settings. From the curves, we can see that the proposed BSO method becomes quite stable within only a few iterations. As shown in
Figure 18a, 50 iterations are enough to locate a solution for the UAV’s waypoint set. Combining with the curves in
Figure 18b, the global best solutions would be found around the 70th iteration. After that, the risk of the UAV path does not change a lot. It becomes much more obvious, as shown in
Figure 18c,d, with 250 and 350 iterations, respectively. In this way, for the proposed BSO method, not so many iterations are needed to find the global best solutions, which further guarantees time efficiency. Meanwhile, there are not so many fluctuations except for the very few beginning iterations.
The trend of PSO is similar to that of the proposed BSO method, as presented in
Figure 18. But the path risk imposed by PSO is much higher in every generation. The path risk of standard BAS is higher than PSO and BSO. Meanwhile, there are more ups and downs, especially in the first 50 iterations, as shown in
Figure 18a. More than 100 iterations are needed for standard BAS to obtain a relative optimum solution based on
Figure 18b–d. When there are 350 iterations, the risk of standard BAS is lower than that of PSO after the 80th iteration. GA and FA are the worst of all. More iterations give GA more fluctuations since the beginning. As described in
Figure 18d for GA, each jump in each generation is so different, which illustrates GA cannot locate the optimum solutions accurately. Quite differently, the path risk of FA under all the iteration settings stays the same from the beginning to the end. It means that FA falls into the local optimum quickly, no matter how many iterations there are. It is 27.23%, 64.14%, 50.36%, and 22.56% lower in the path risk of the proposed BSO method than PSO, GA, FA, and standard BAS.
Figure 19 shows the accumulated turning angles on a given UAV path by the five algorithms with the different iterations. From the curves, it can be seen that in the few beginning iterations, there would be fluctuations for the proposed BSO method, PSO, and standard BAS. However, the convergence rates of the proposed BSO method are the best of the three.
Based on
Figure 19b–d, there are more turning angles on the UAV path generated by the proposed BSO method than PSO after the 32nd, 98th, and 41st iterations. After that, the turning angles of the two would remain stable until the end. Considering the previous analysis, the proposed BSO method guarantees the lowest path risk as well as the shortest UAV path by sacrificing the turning angles, which makes sense in the actual operations. Standard BAS is worse than the two above on the turning angles, with more ups and downs. According to the curves provided in
Figure 19, for standard BAS, more than 110 iterations are needed to reach the optimum positions because, in BAS, only one beetle is used to locate the best in each move. GA and FA are the worst of all. The turning angles of FA are determined at the beginning and would not change anymore, which is because the local optimum solutions are found and are taken as the global optimum waypoints. This drawback of FA cannot be overcome by itself. Oppositely, GA changes all the time in every iteration. As shown in
Figure 19, GA cannot find consistent solutions, which makes it jump from iteration to iteration. It seems that it jumps around a possible solution but will never reach it. Actually, GA is suitable to solve the discrete problems instead of the continuous ones, such as path planning considering the ground risk. Especially for this kind of multi-objective optimization problem in a given solution space, the performances of GA will be quite poor and cannot satisfy all the constraint conditions.
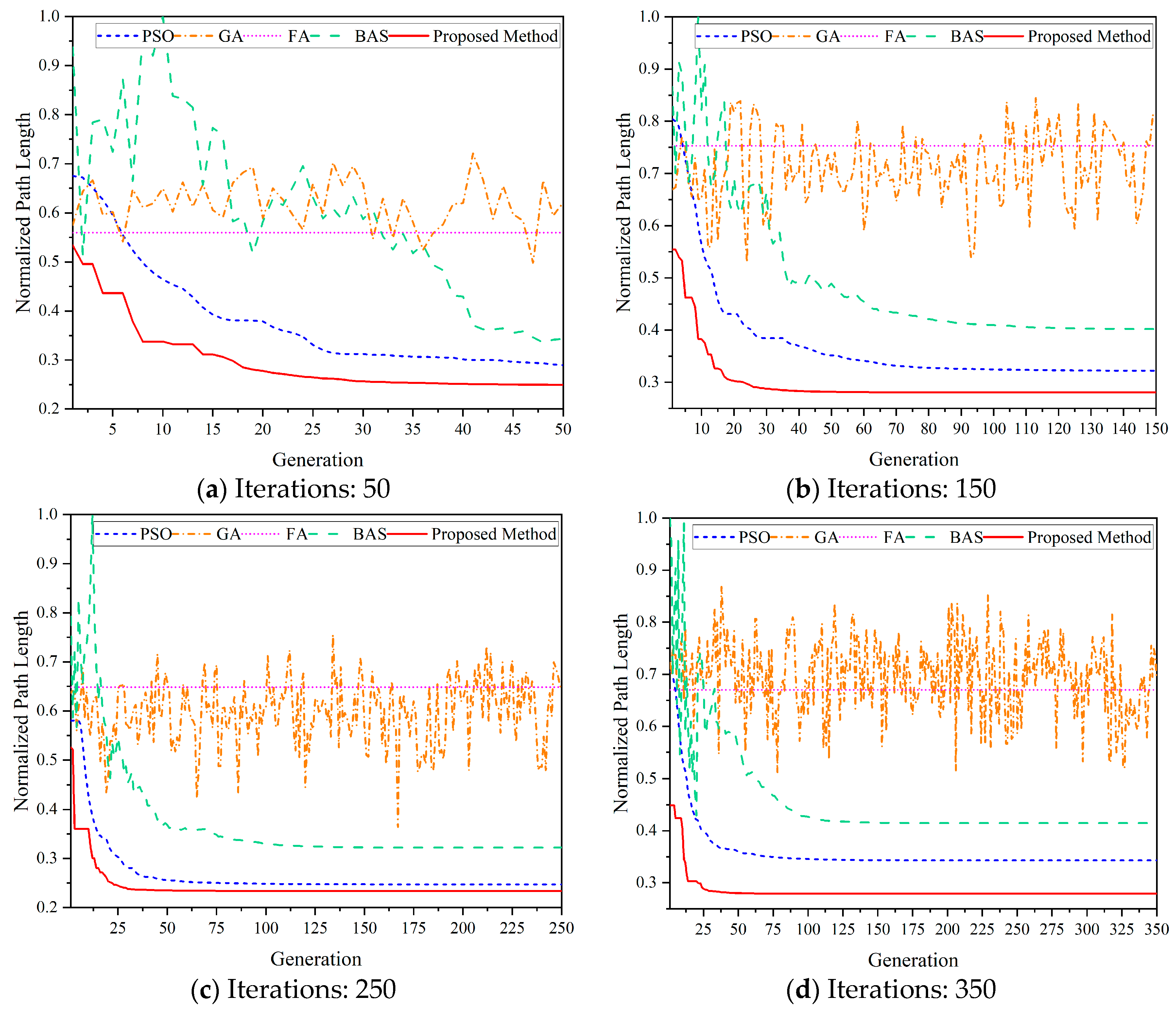
The path lengths of these different algorithms with the effects of the iterations are presented in
Figure 20. It is obvious that the proposed BSO method is the best, with the shortest path length under all kinds of iteration settings. Also, its rate of convergence is the fastest, and it can complete around 30 iterations. PSO is similar, but the rate of convergence is lower than the proposed one. Generally, 70 iterations are needed for PSO based on the data provided in
Figure 20. The final normalized path length of PSO is longer than that of the proposed BSO method under all the conditions. Standard BAS is worse than the aforementioned two but better than GA and FA. A lot of ups and downs exist in the beginning, and after that, it becomes stable until the convergence, but with a much longer path in the final iteration. FA and GA are the worst, with the longest paths. For FA, once it starts, the path length would remain the same without any changes. It proves that FA cannot locate the optimum solutions, and the first generated one will be seen as the global best, which is then kept in the whole optimization process. As a matter of fact, it is far away from the true optimum values. GA will fluctuate all the time, trying to obtain the global optimum solutions. However, because of the existence of the strong randomness, it cannot reach but only moves around it. As presented in
Figure 20, the normalized path lengths undulate from iteration to iteration for GA. The final obtained waypoints may also not be the global best. Compared with PSO, GA, FA, and standard BAS, the proposed BSO is 18.59%, 59.66%, 58.30%, and 32.64% shorter in the normalized path length, respectively.
The overall path cost of the five algorithms can be found in
Figure 21. There is no doubt that more iterations would make both of the proposed BSO and PSO algorithms become more smooth. That is because by evolving more generations, the individuals in a swarm would move closer and closer to the true optimum solutions in the search space. However, the total cost of the path generated by PSO would be higher than that of the proposed BSO method under all the conditions in
Figure 21. Also, more iterations can smooth the curves of standard BAS because, by going through more iterations, the beetle would move more steps towards the best position. Correspondingly, the path cost would become more stable. But the values are higher than the proposed BSO method as well as PSO.
As shown in
Figure 21, GA and FA are the worst of the five. Ultimately, the total path costs of the two are the highest out of all options. GA jumps all the time from the first iteration to the last one, no matter how many iterations there are. It always fails to locate an optimum solution in this scenario. From the curves, we can see that GA would fluctuate a lot around a certain value but will never reach it. That is because GA belongs to a kind of discrete algorithm in that the cost values would be separated during two consecutive iterations. It will be more obvious when there are more iterations, as shown in
Figure 21c,d. From the normalized path cost given in the figure, it is a straight line for FA, which is because a fake optimum value is found and is then used as the global best. The local best is the problem that cannot be overcome by FA when it is trying to locate an optimum solution in the search space. Even though there are 350 iterations for FA, as shown in
Figure 21d, the path cost of FA still remains the same in the end, which is determined by itself. Based on the data provided in
Figure 21, the proposed BSO method is 18.57%, 59.66%, 58.30%, and 32.63% better than PSO, GA, FA, and standard BAS.
The effects of the iterations on the generated UAV paths are provided in
Figure 22. From the curves, the path generated by the proposed BSO method is the smoothest, besides the fewest turns on it. It proves that it is quite suitable for the UAVs to follow. Also, combined with the previous results, the cost of the UAV path given by the proposed BSO method is the lowest. All in all, the number of iterations could generate quite limited effects on the proposed BSO method, which, as a result, proves its accuracy and robustness. It would converge as soon as possible without too many iterations. But, oppositely, the number of iterations affects the other four algorithms a lot. For example, for PSO, more iterations would make the path smoother. Especially in
Figure 22c, when the iteration is 250, PSO could generate a similar path to the proposed BSO method but with more turns on the path. If the particles in PSO evolve more generations, the solutions are much closer to the true global best. But more generations introduce more time consumption correspondingly. Standard BAS is highly dependent on the iterations, too, because if the beetle makes more moves, it becomes closer to the optimum position. There are a great many turns on the paths produced by GA and FA, regardless of the number of iterations. Of course, the iterations have positive effects on GA and FA. More iterations make the two algorithms obtain relatively optimum solutions, which makes the generated paths easy for the UAVs to follow. But as a whole, neither GA nor FA would give the perfect flying paths as the proposed BSO method.
5.5. Comparisons with Dijkstra and A* Algorithms
In this subsection, the proposed BSO method is compared with Dijkstra and A* algorithms to better evaluate its performance. In the simulation, the two parameters, including the swarm size and individual dimension of the proposed BSO method, are set as 20 and 15, respectively. Its number of iterations is 150.
Table 2 below gives the cost comparisons of these three path-planning algorithms. In this table, the normalized path risk, turning angles, path length, and path cost are provided.
From the table, it can be found that the path risk of the proposed BSO method is the least of all, which proves that the generated path is the safest when it is followed by the UAVs. It is 64.00% and 54.43% safer than Dijkstra and A* algorithms. The turning angles and path length of the proposed BSO method are still the best of the three, which are 63.00% and 55.42% better in turning angles and 64.00% and 54.43% better in path length compared with Dijkstra and A* algorithms, respectively. The overall path cost of the proposed BSO method is the lowest compared with Dijkstra and A* algorithms, which are improved by 52.00% and 44.19%, respectively. Furthermore, the A* algorithm is better than the Dijkstra algorithm in all the performance indexes provided in
Table 2. Dijkstra algorithm works the worst in this path-planning scenario, especially considering the ground risk, which means that the global optimum path is not found at all.
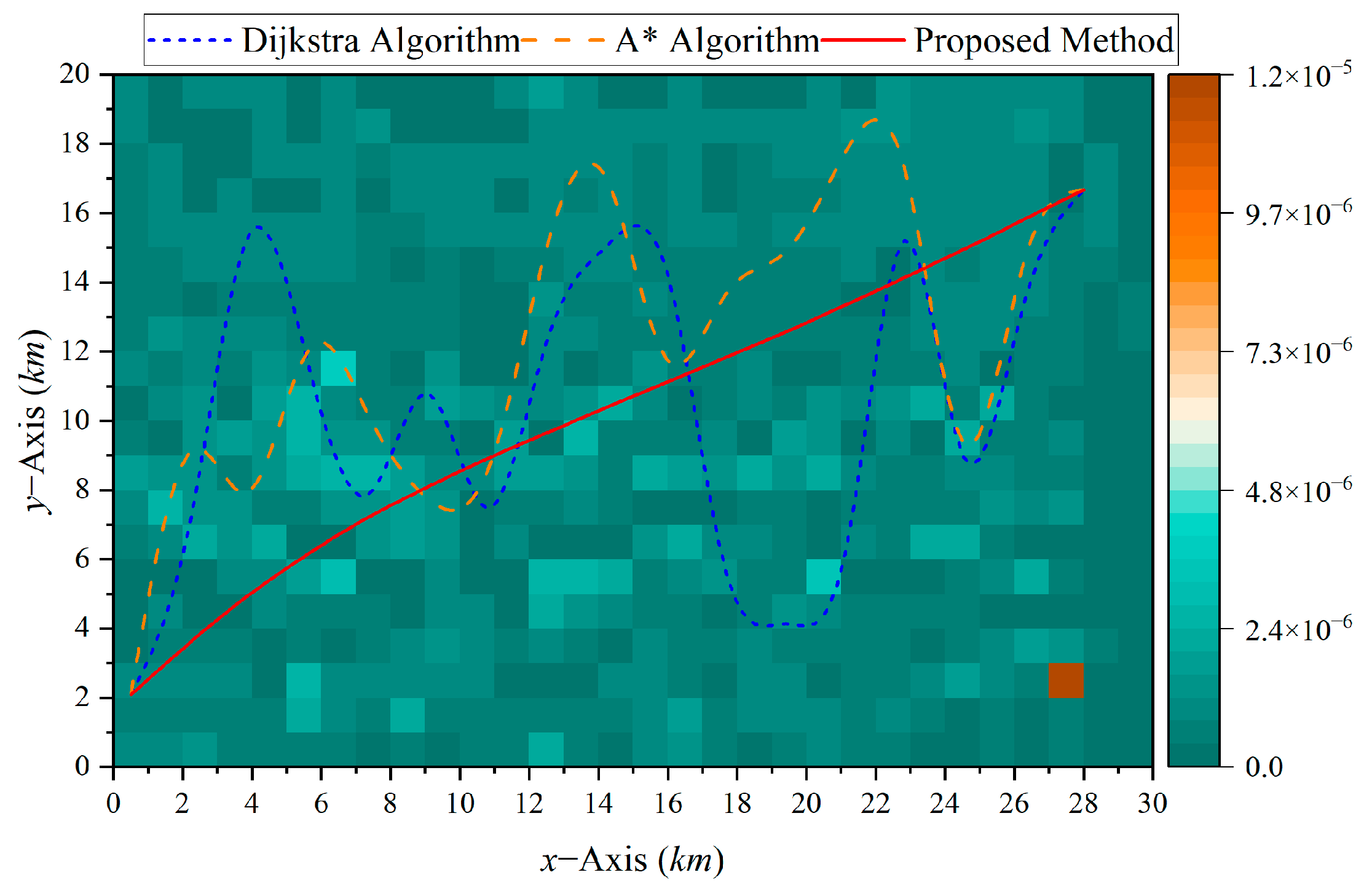
The UAV path considering the ground risk distributions generated by the aforementioned three algorithms is shown in
Figure 23. From this figure, all three paths generated by these algorithms are always trying to be away from the southeastern areas, whose ground risk is higher. It can be found that the path produced by the proposed BSO method is the closest to the straight line connecting the starting point and the destination point with the least path cost based on the data provided in
Table 2. Additionally, the A* algorithm is better than the Dijkstra algorithm, with fewer turning angles and a shorter path length. The Dijkstra algorithm is the worst of all, and it is not suitable for the UAVs to follow with the highest ground risk as well as the longest path length and the most turning angles. All in all, the path provided by the proposed BSO method is the smoothest with the lowest flying cost and has proved to be the most suitable for UAVs to follow.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}