
Research on Characteristics of Flow Noise and Flow-Induced Noise


Abstract
:1. Introduction
2. Computational Theory
2.1. Flow Noise Calculation Theory
2.2. Flow-Induced Noise Calculation Theory
3. Validation of Calculation Method
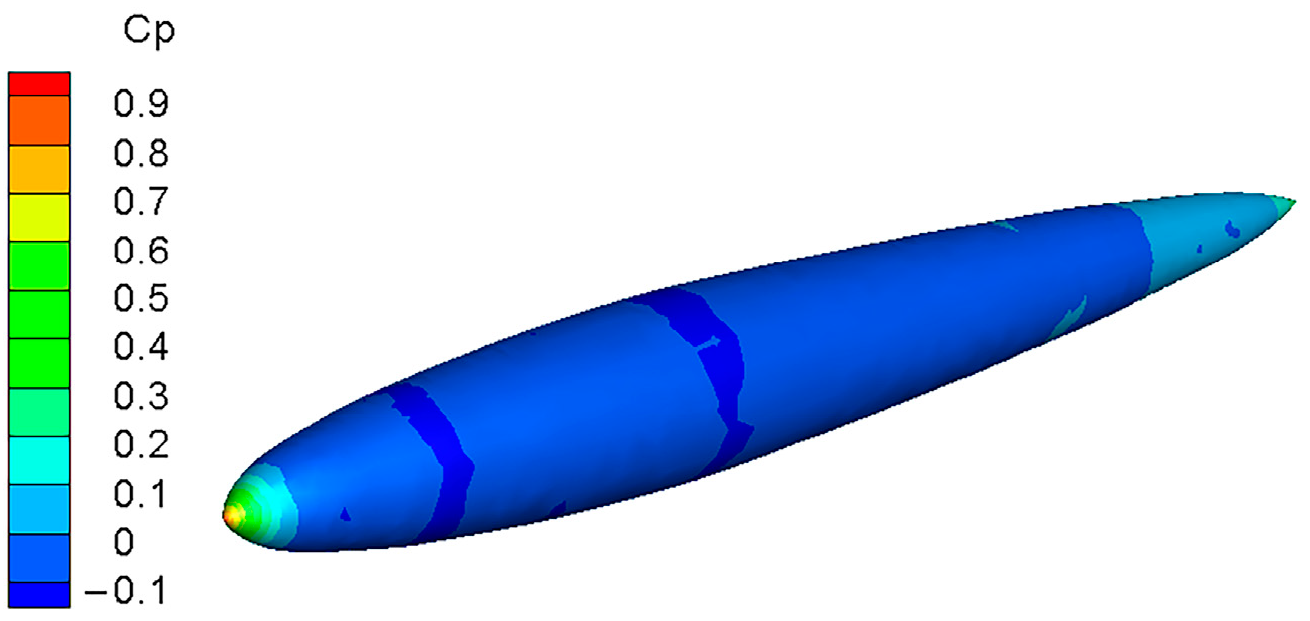
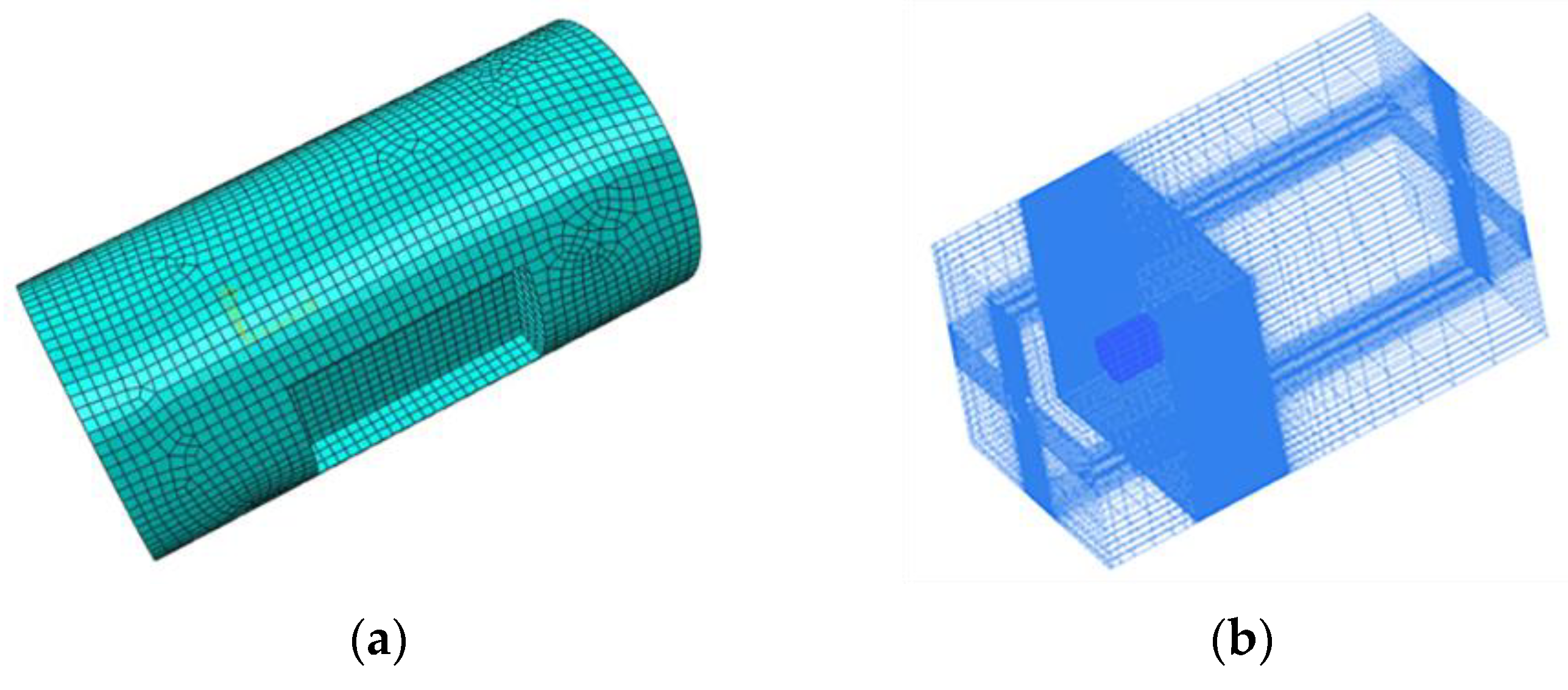
3.1. Computational Model and Boundary Conditions
- Velocity inlet: The left end face (blue) of the fluid domain, with a Dirichlet boundary condition of 5 m/s velocity.
- Outflow: The right end face (yellow) of the fluid domain, located 2 submarine lengths behind the stern, so a free outflow boundary condition was used.
- Symmetry boundary condition: The upper, lower, left, and right four end faces of the fluid domain. These positions were far away from the submarine surface, so the normal velocity components on these end faces could be considered zero, thus a symmetry boundary condition was used.
- Wall boundary condition: The outer surface (green) of the model, with a no-slip boundary condition.
3.2. Computational Method
3.3. Computational Results and Analysis
4. Noise Calculation of Cylindrical Shell Model
4.1. Computational Model
4.2. Flow Noise Calculation
4.3. Flow-Induced Noise Calculation
4.4. Comparison of Flow Noise and Flow-Induced Noise
5. Experiments
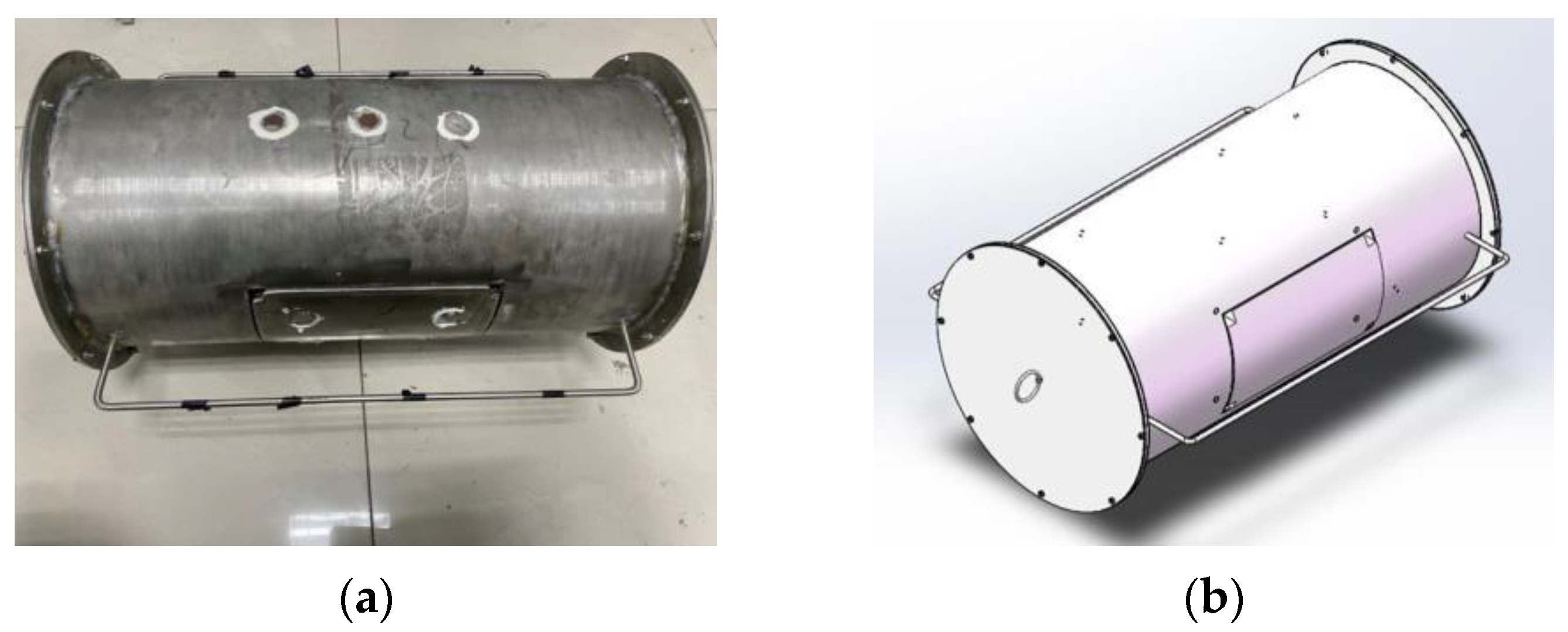
5.1. Experimental Model
5.2. Arrangement of Experimental Instruments
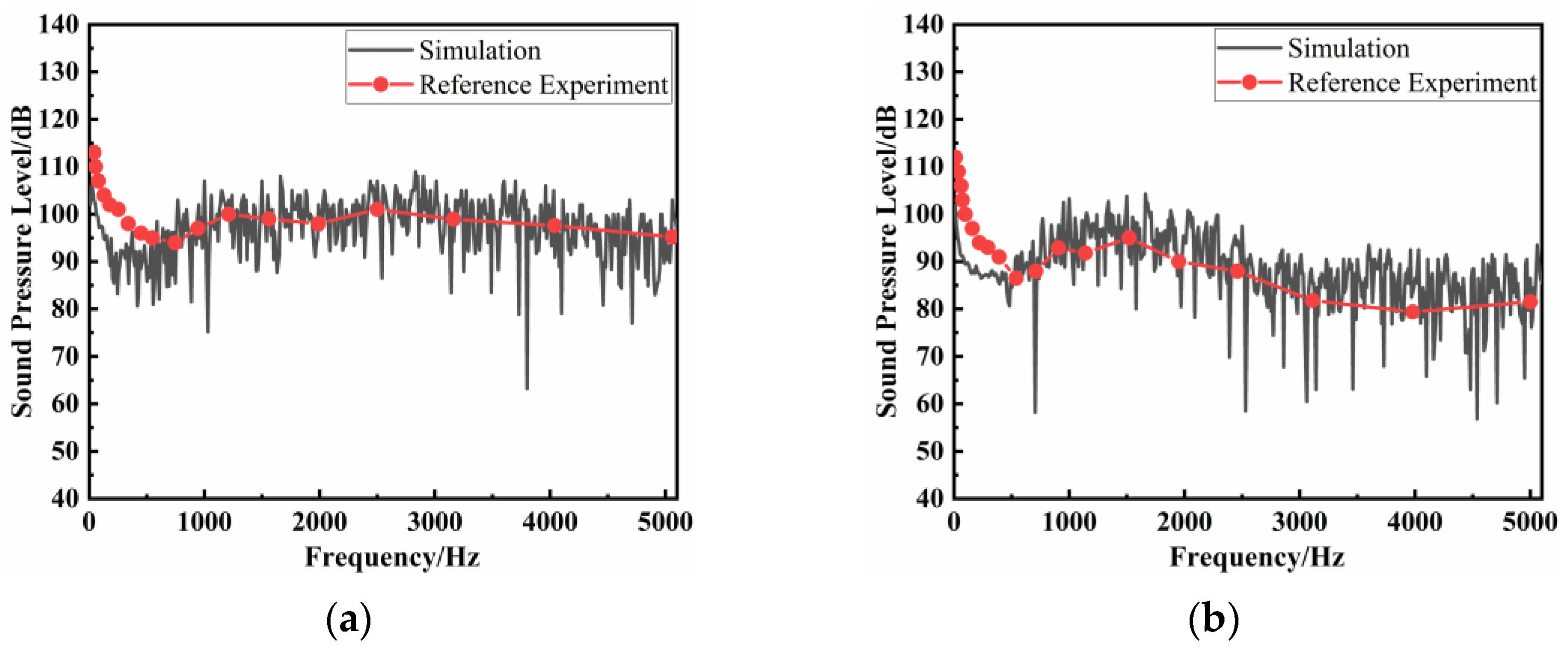
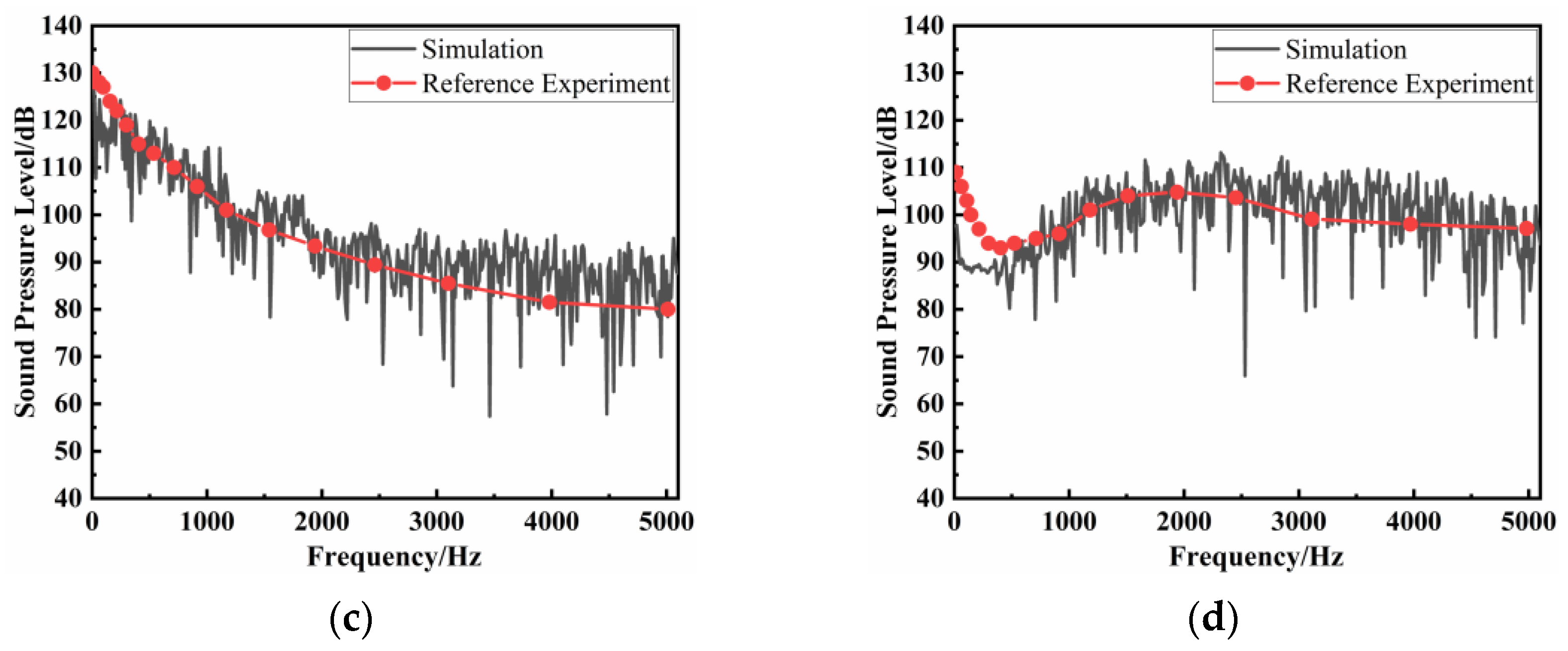
5.3. Signal Processing Results
6. Conclusions
- (1)
- The validation of the computational method was performed using a teardrop submarine model, and the pressure curves at various detection points exhibited consistency with experimental trends.
- (2)
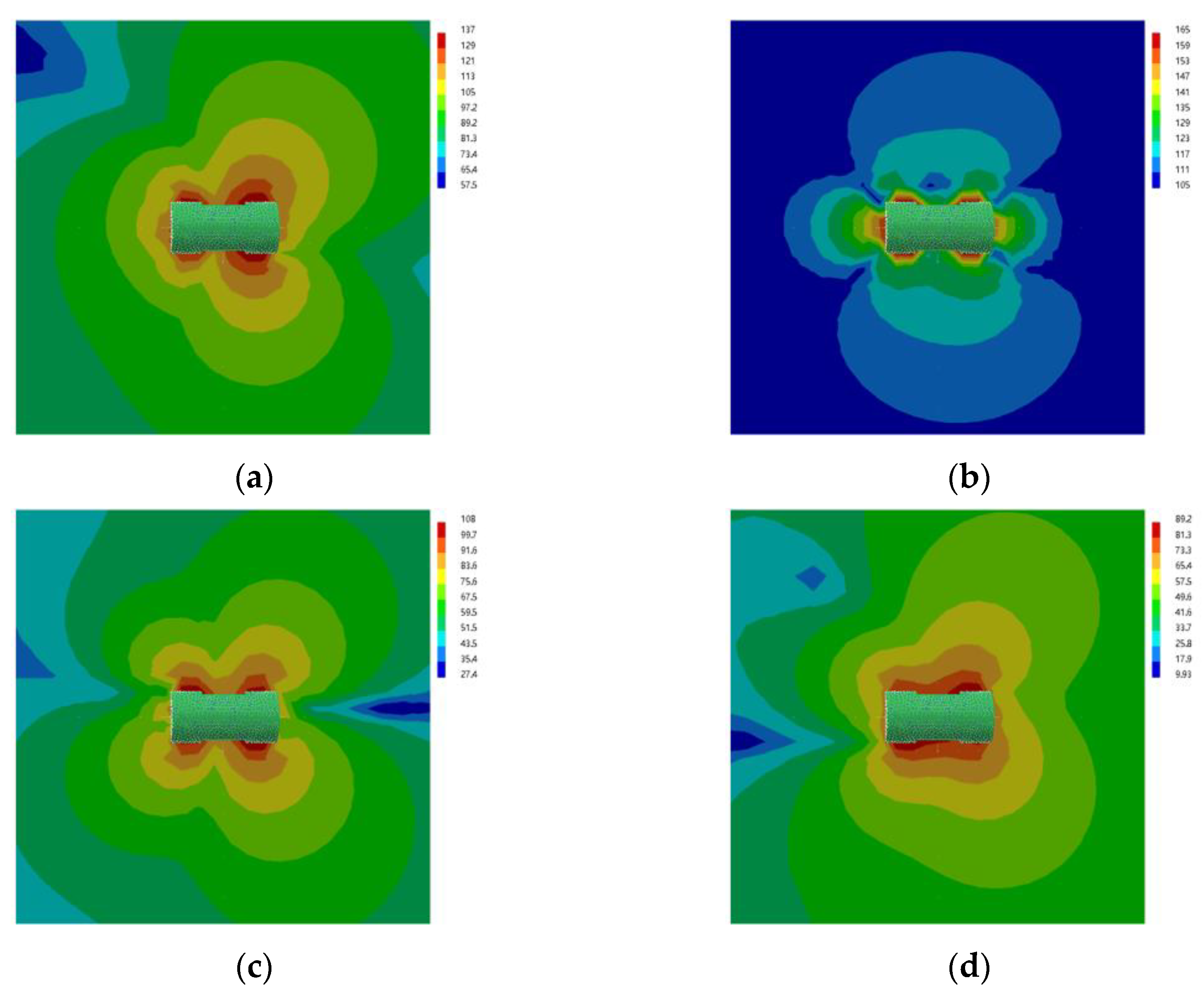
- According to the result of detection points at different distances in the X, Y, and Z axes, the spatial characteristics of flow noise and flow-induced noise were compared and analyzed. The results indicate that, at the same frequency, flow-induced noise was greater than flow noise. In the near-field region, both flow noise and flow-induced noise exhibited a significant decay rate, which stabilized as the distance increased.
- (3)
- The experimental results demonstrate that the simulated sound pressure values at the detection points exhibited a consistent trend with the experimental values, with an error of 8% at the peak. Therefore, the simulation results can effectively reflect the characteristics of the actual underwater acoustic environment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Audoly, C. Sonar array self-noise analysis using hydrophone cross-correlation functions. J. Acoust. Soc. Am. 1995, 97, 3294. [Google Scholar] [CrossRef]
- Cao, H.; Wen, L. High-Precision Numerical Research on Flow and Structure Noise of Underwater Vehicle. Appl. Sci. 2022, 12, 12723. [Google Scholar] [CrossRef]
- Yu, M.; Wu, Y.; Pang, Y. A review of progress for hydrodynamic noise of ships. J. Ship Mech. 2007, 11, 152–158. [Google Scholar]
- Liu, Y.; Li, Y.; Shang, D. The generation mechanism of the flow-induced noise from a sail hull on the scaled submarine model. Appl. Sci. 2018, 9, 106. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, H.; Li, Y.; Shang, D. Suppression of the Hydrodynamic Noise Induced by the Horseshoe Vortex through Mechanical Vortex Generators. Appl. Sci. 2019, 9, 737. [Google Scholar] [CrossRef]
- Lu, Y.T.; Zhang, H.X.; Pan, X.J. Numerical simulation of flow-field and flow-noise of a fully appendage submarine. J. Vib. Shock. 2008, 27, 142–146. [Google Scholar]
- Zen, W.D.; Wang, Y.S.; Yang, Q.F. Numerical calculation of flow noise of submarine with full appendages. Acta Armamentarii 2010, 31, 1024. [Google Scholar]
- Kellett, P.; Turan, O.; Incecik, A. A study of numerical ship underwater noise prediction. Ocean. Eng. 2013, 66, 113–120. [Google Scholar] [CrossRef]
- Wang, C.; Deng, X.L.; Zhang, L.X. Prediction of submarine noise based on LES and infinite element method. Noise Vib. Control 2015, 35, 1–6. [Google Scholar]
- Shi, J.D. Research on acoustic radiation characteristics of submarine current excitation based on SUBOFF mode. In Proceedings of the 17th National Academic Conference on Noise and Vibration Control, Beijing, China, 11 April 2023. [Google Scholar]
- Jun, F.; Zhang, Z.; Wei, C.; Hong, M.; Li, J. Computational Fluid Dynamics Simulations of the Flow Field Characteristics in a Novel Exhaust Purification Muffler of Diesel Engine. J. Low Freq. Noise Vib. Act. Control 2018, 37, 816–833. [Google Scholar] [CrossRef]
- Wahono, B.; Setiawan, A.; Lim, O. Effect of the Intake Port Flow Direction on the Stability and Characteristics of the In-Cylinder Flow Field of a Small Motorcycle Engine. Appl. Energy 2021, 288, 116659. [Google Scholar] [CrossRef]
- Plattenburg, J.; Dreyer, J.T.; Singh, R. Vibration Control of a Cylindrical Shell with Concurrent Active Piezoelectric Patches and Passive Cardboard Liner. Mech. Syst. Signal Process. 2017, 91, 422–437. [Google Scholar] [CrossRef]
- De Santis, D.; Shams, A. Numerical Study of Flow-Induced Vibration of Fuel Rods. Nucl. Eng. Des. 2020, 361, 110547. [Google Scholar] [CrossRef]
- Zhu, J.; Lv, Z.; Liu, H. Thermo-Electro-Mechanical Vibration Analysis of Nonlocal Piezoelectric Nanoplates Involving Material Uncertainties. Compos. Struct. 2019, 208, 771–783. [Google Scholar] [CrossRef]
- Lighthill, M.J. On Sound Generated Aerodynamically I. General Theory. Proc. R. Soc. Lond. Ser. A 1952, 211, 564–587. [Google Scholar]
- Allen, M.J.; Vlahopoulos, N. Integration of finite element and boundary element methods for calculating the radiated sound from a randomly excited structure. Comput. Struct. 2000, 77, 155–169. [Google Scholar] [CrossRef]
- Schram, C. A boundary element extension of Curle’s analogy for non-compact geometries at low-Mach numbers. J. Sound Vib. 2009, 322, 264–281. [Google Scholar] [CrossRef]
- Shen, G.J. Submarine Design Principles, 1st ed.; Shanghai Jiao Tong University Press: Shanghai, China, 1988; pp. 14–31. [Google Scholar]
- Moonesun, M.; Korol, Y.M. A review study on the bare hull form equations of submarine. Studies 2014, 2, 3. [Google Scholar]
- Lu, Y.T.; Zhang, H.X.; Pan, X.J. Comparison betweenthe simulations of flow-noise of a submarine-likebody with four different turbulent models. J. Hydrodyn. 2008, 23, 348–355. [Google Scholar]
- Legensky, S.; Edwards, D.; Bush, R.; Poirier, D.; Rumsey, C.; Cosner, R.; Towne, C. CFD general notation system (CGNS)-status and future directions. In Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 14–17 January 2002; p. 752. [Google Scholar]
- Lu, Y.T. Numerical Simulation of Flow-Field and Flow-Noise of a Fully Appendage Submarine. Master’s Thesis, Shanghai Jiao Tong University, Shanghai, China, 2008. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Hydrophone | Axial (m) | Circumferential (°) |
|---|---|---|
| A1 | 0.48 | 180 |
| A2 | 1.28 | 180 |
| A3 | 1.6 | 180 |
| A4 | 2.08 | 180 |
| A5 | 2.72 | 180 |
| A6 | 1.6 | 95 |
| A7 | 1.6 | 120 |
| A8 | 1.6 | 150 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Xu, X.; Wu, J.; Zhang, L.; Wan, Z. Research on Characteristics of Flow Noise and Flow-Induced Noise. Appl. Sci. 2023, 13, 11095. https://doi.org/10.3390/app131911095
Li B, Xu X, Wu J, Zhang L, Wan Z. Research on Characteristics of Flow Noise and Flow-Induced Noise. Applied Sciences. 2023; 13(19):11095. https://doi.org/10.3390/app131911095
Chicago/Turabian StyleLi, Bingru, Xudong Xu, Junhan Wu, Luomin Zhang, and Zhanhong Wan. 2023. "Research on Characteristics of Flow Noise and Flow-Induced Noise" Applied Sciences 13, no. 19: 11095. https://doi.org/10.3390/app131911095
APA StyleLi, B., Xu, X., Wu, J., Zhang, L., & Wan, Z. (2023). Research on Characteristics of Flow Noise and Flow-Induced Noise. Applied Sciences, 13(19), 11095. https://doi.org/10.3390/app131911095