
Modeling of Traffic Information and Services for the Traffic Control Center in Autonomous Vehicle-Mixed Traffic Situations

Abstract
:1. Introduction
2. Related Works
2.1. Traffic Information Center
2.2. Modeling of Traffic Information
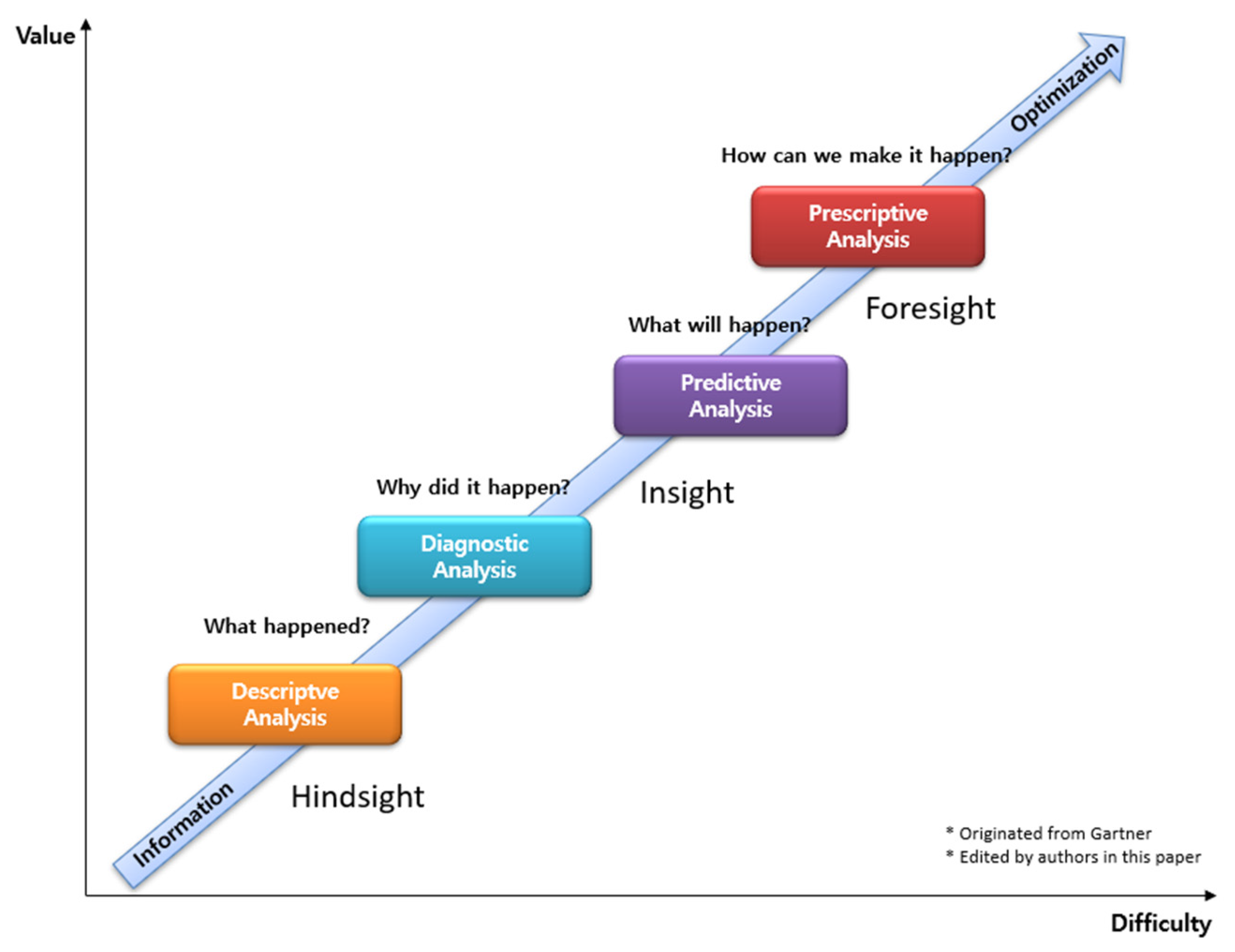
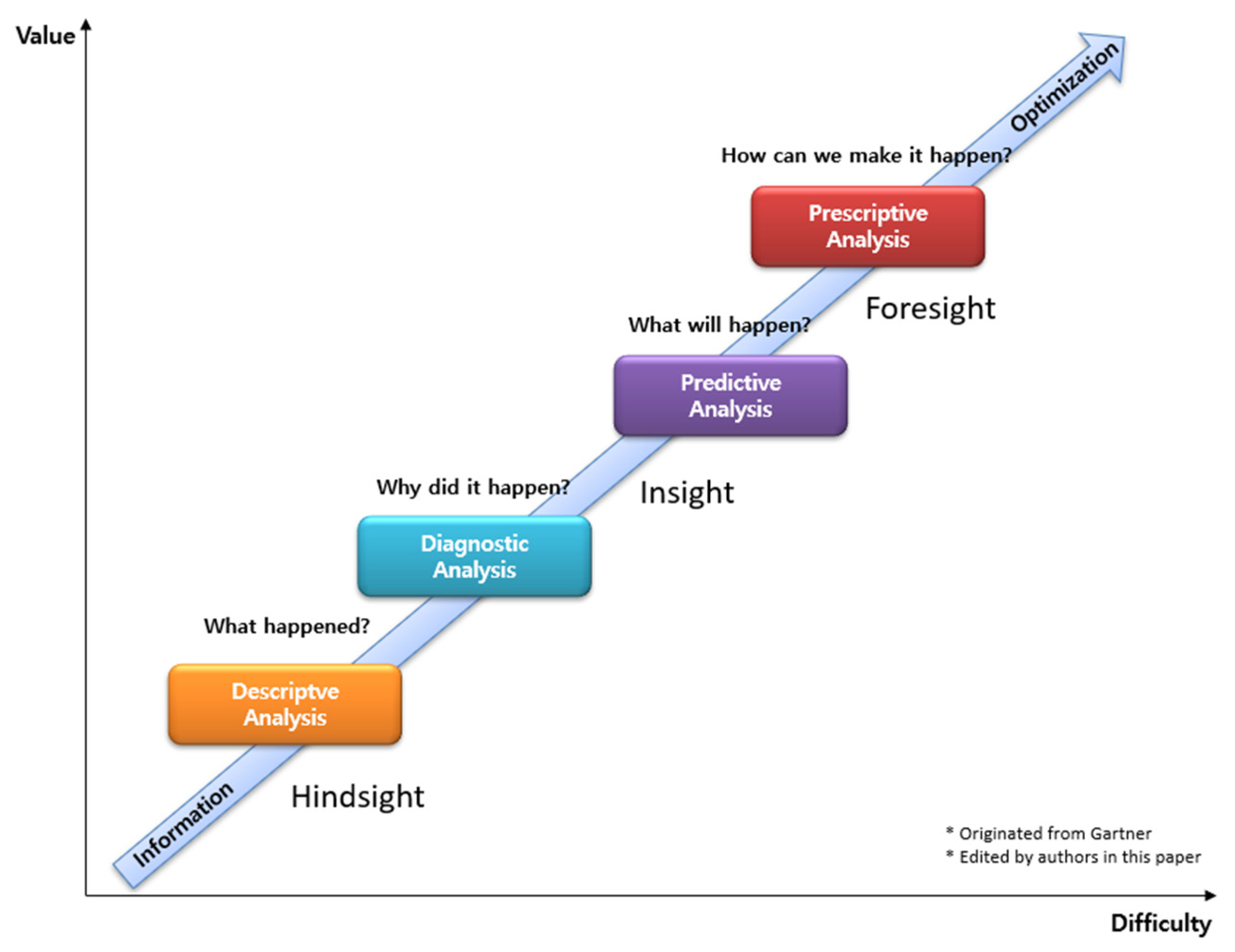
2.3. Gartner’s Analytic Ascendancy Model
3. Modeling of AV-Mixed Traffic Information
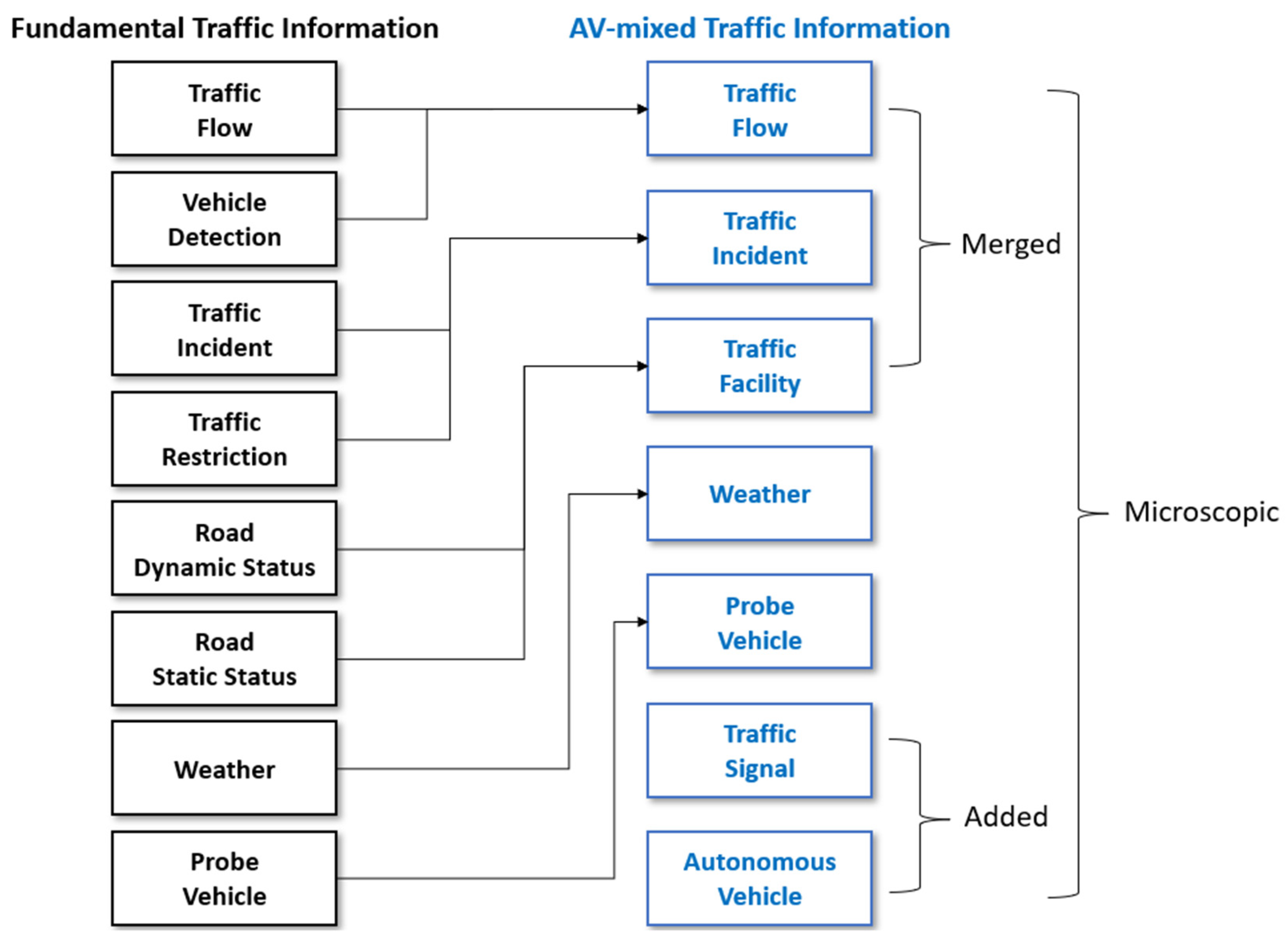
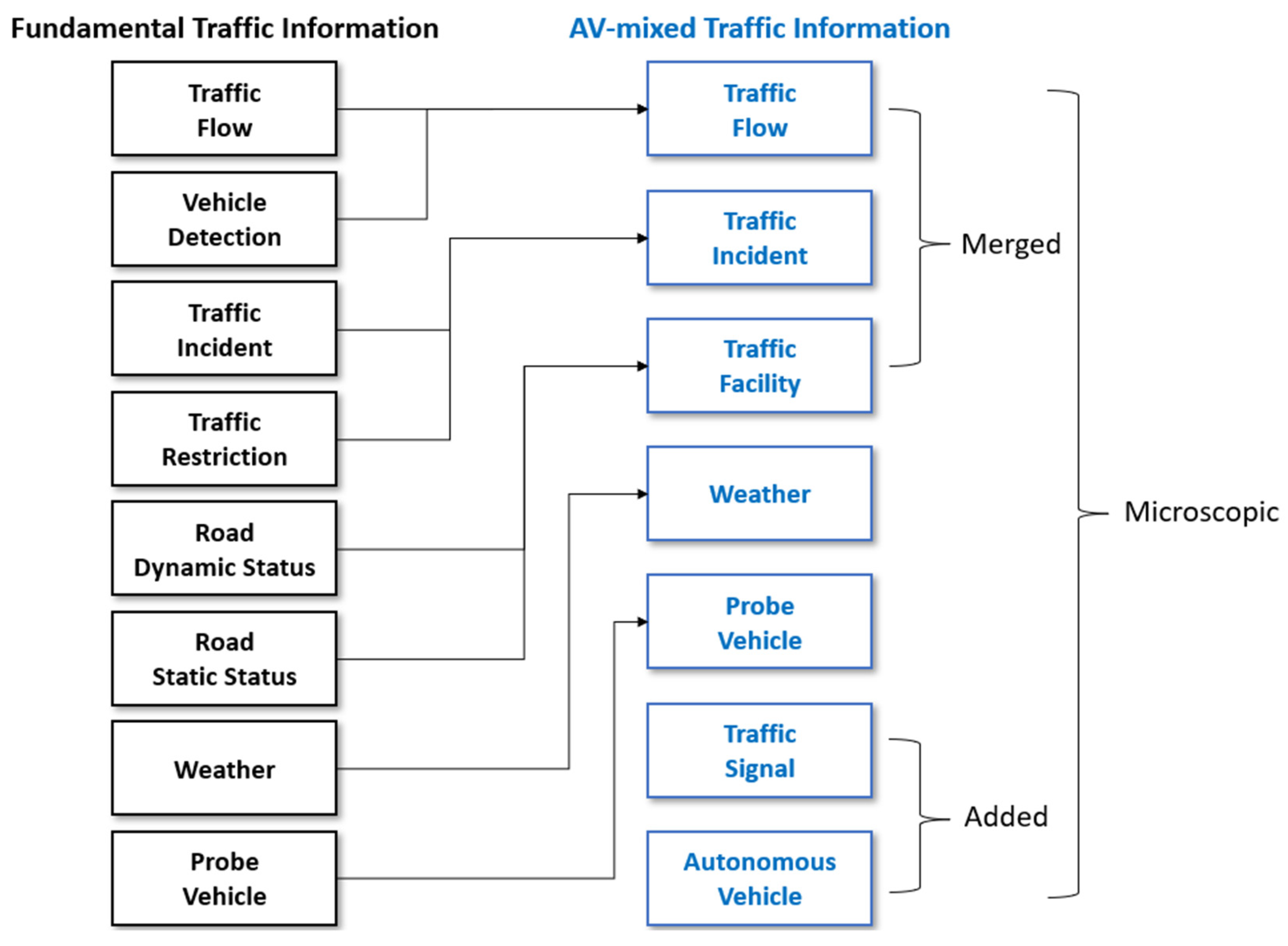
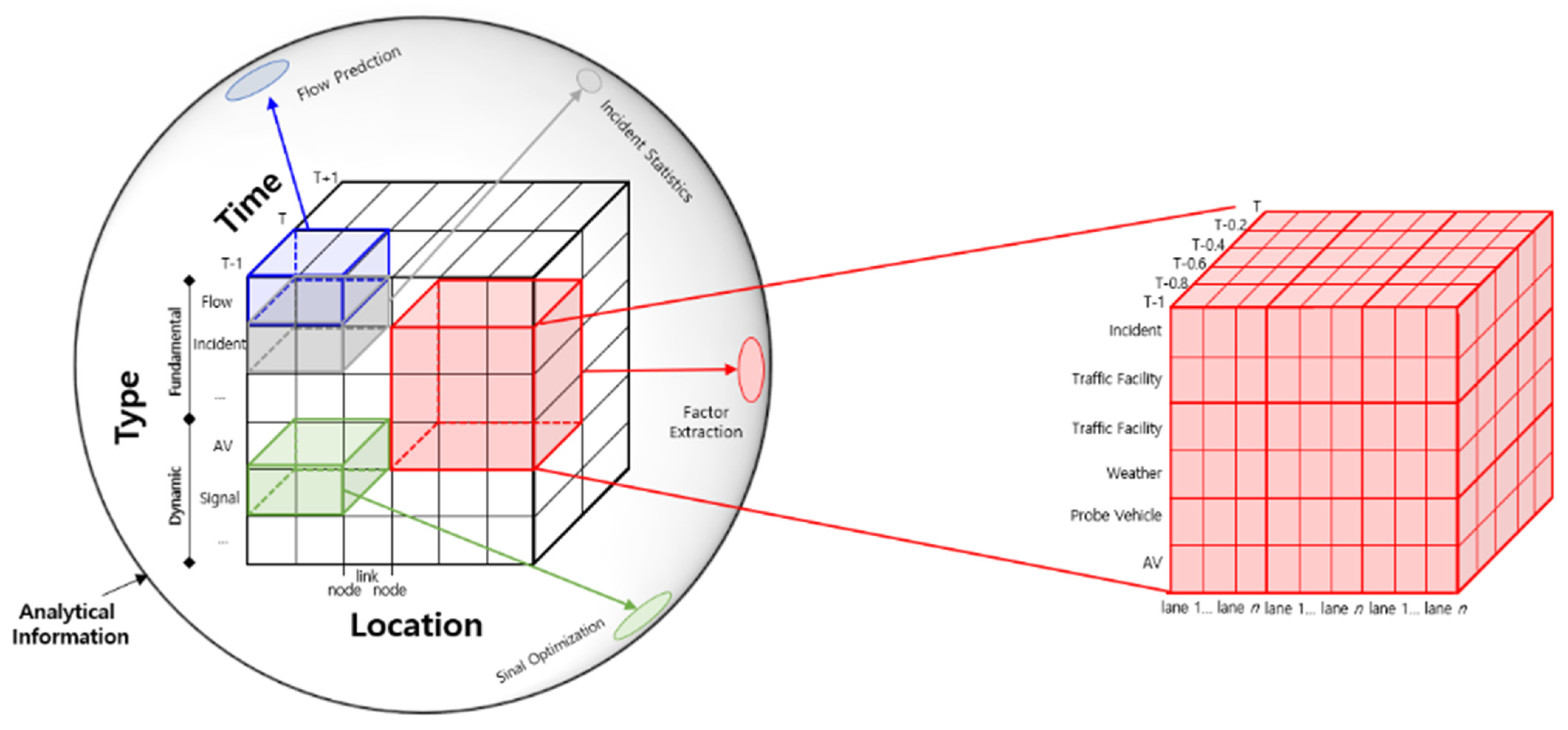
3.1. Definition of AV-Mixed Traffic Information
| AV-mixed Traffic Information refers to |
| the Primitive Traffic Information of traffic control centers of the future, |
| derived by spatially subdividing the Fundamental Traffic Information |
| and adding the dynamic information of traffic objects. |
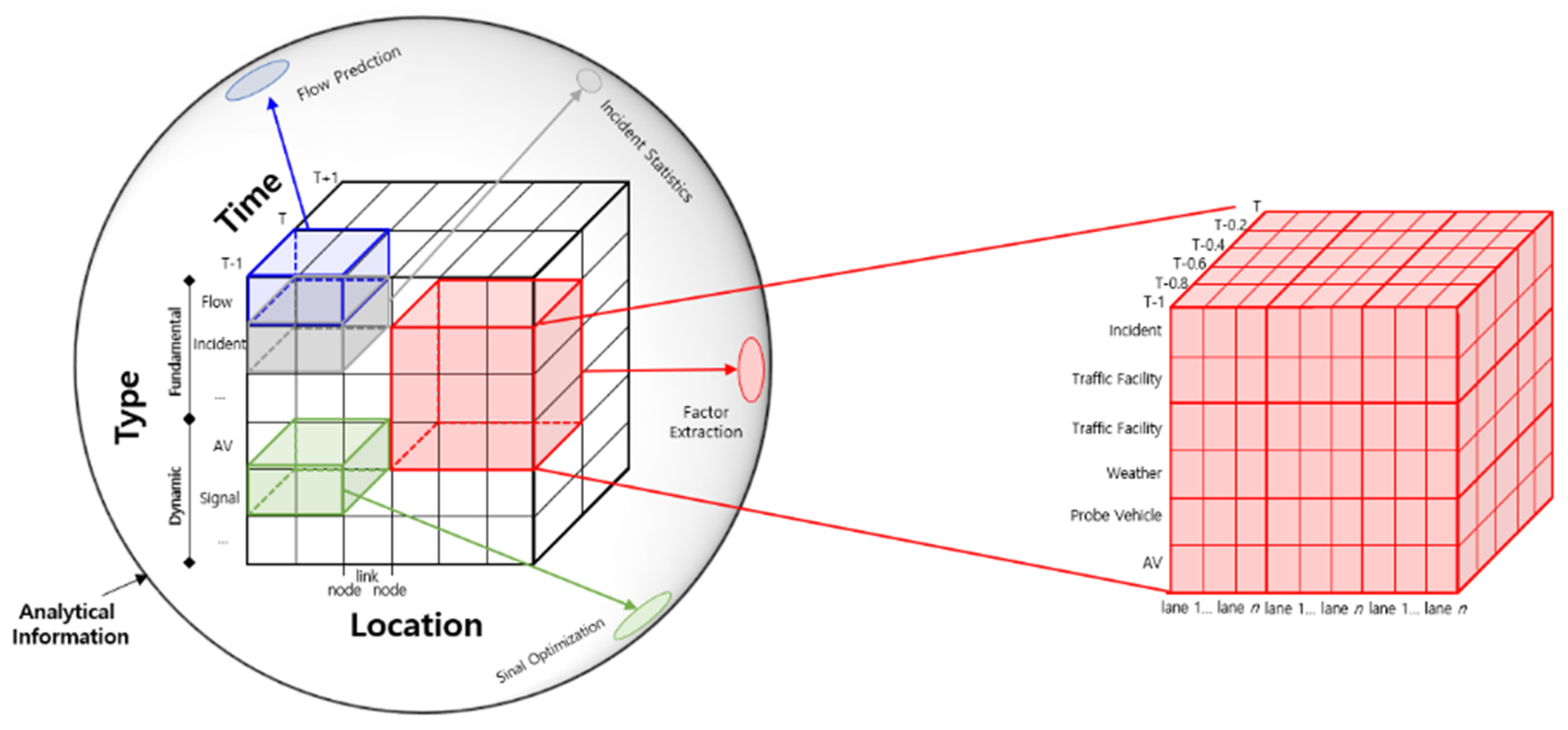
3.2. Notation for AV-Mixed Traffic Information
3.3. Result of AV-mixed Traffic Information Modeling
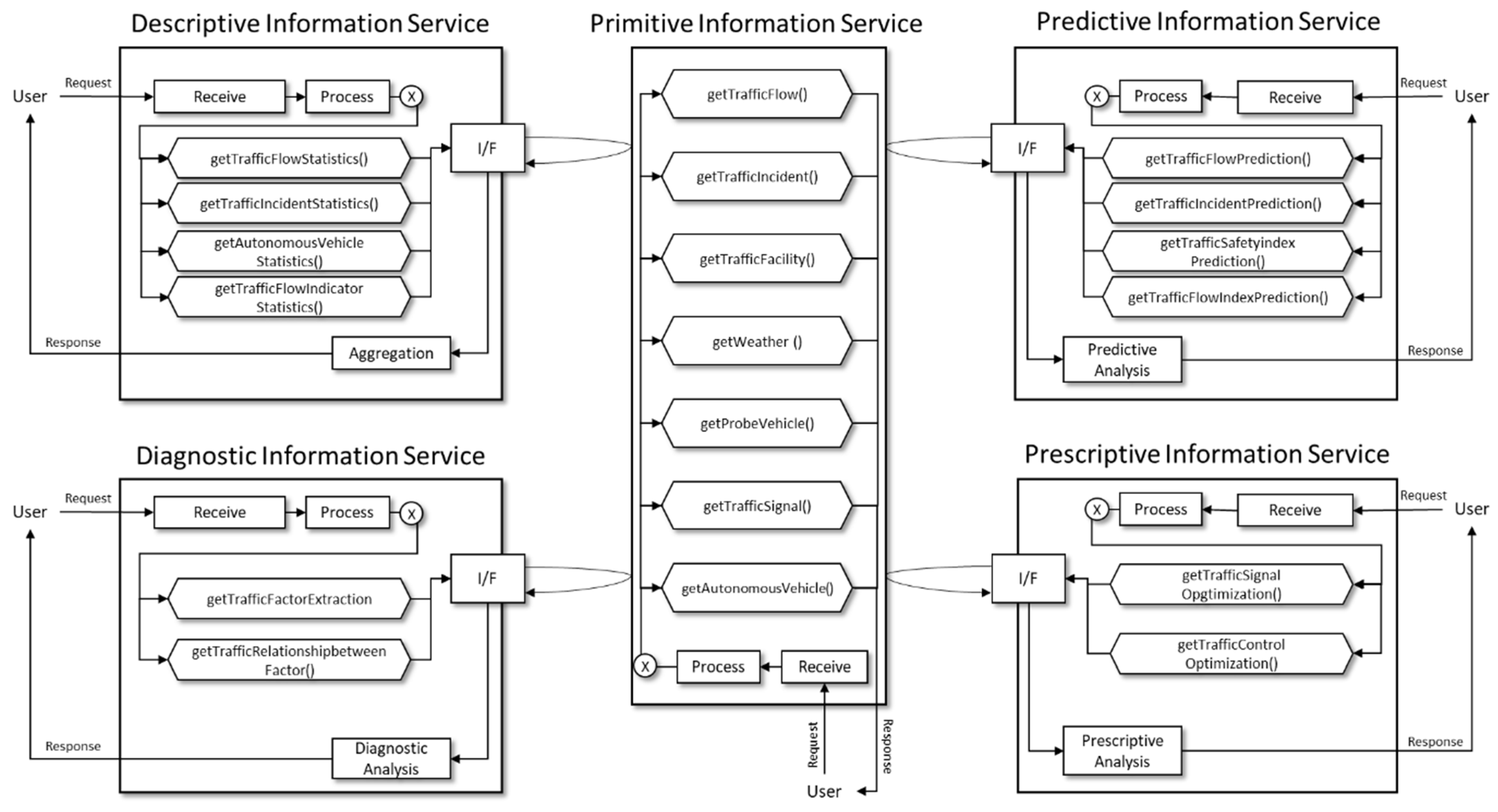
4. Modeling of AV-Mixed Traffic Information Services
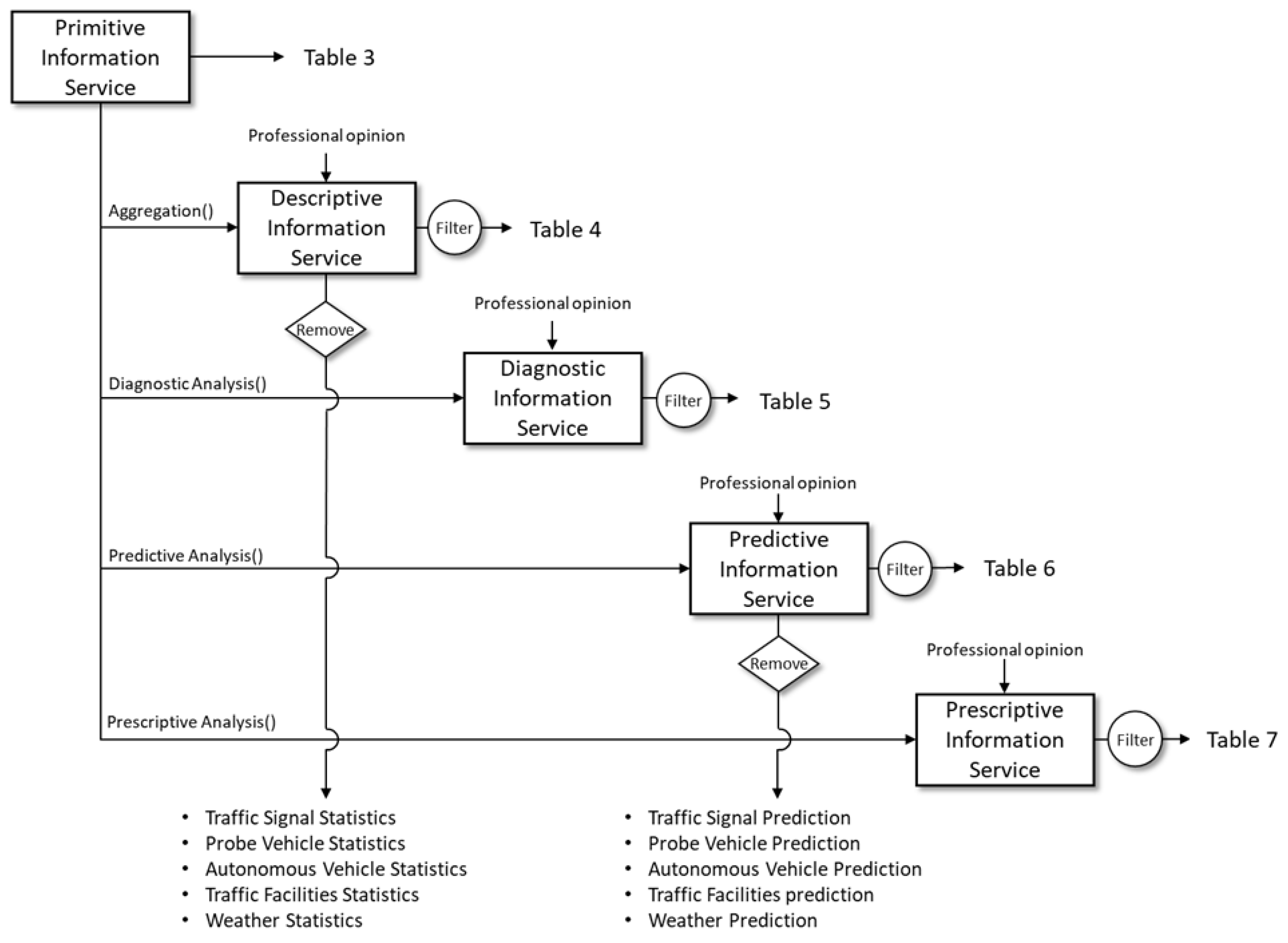
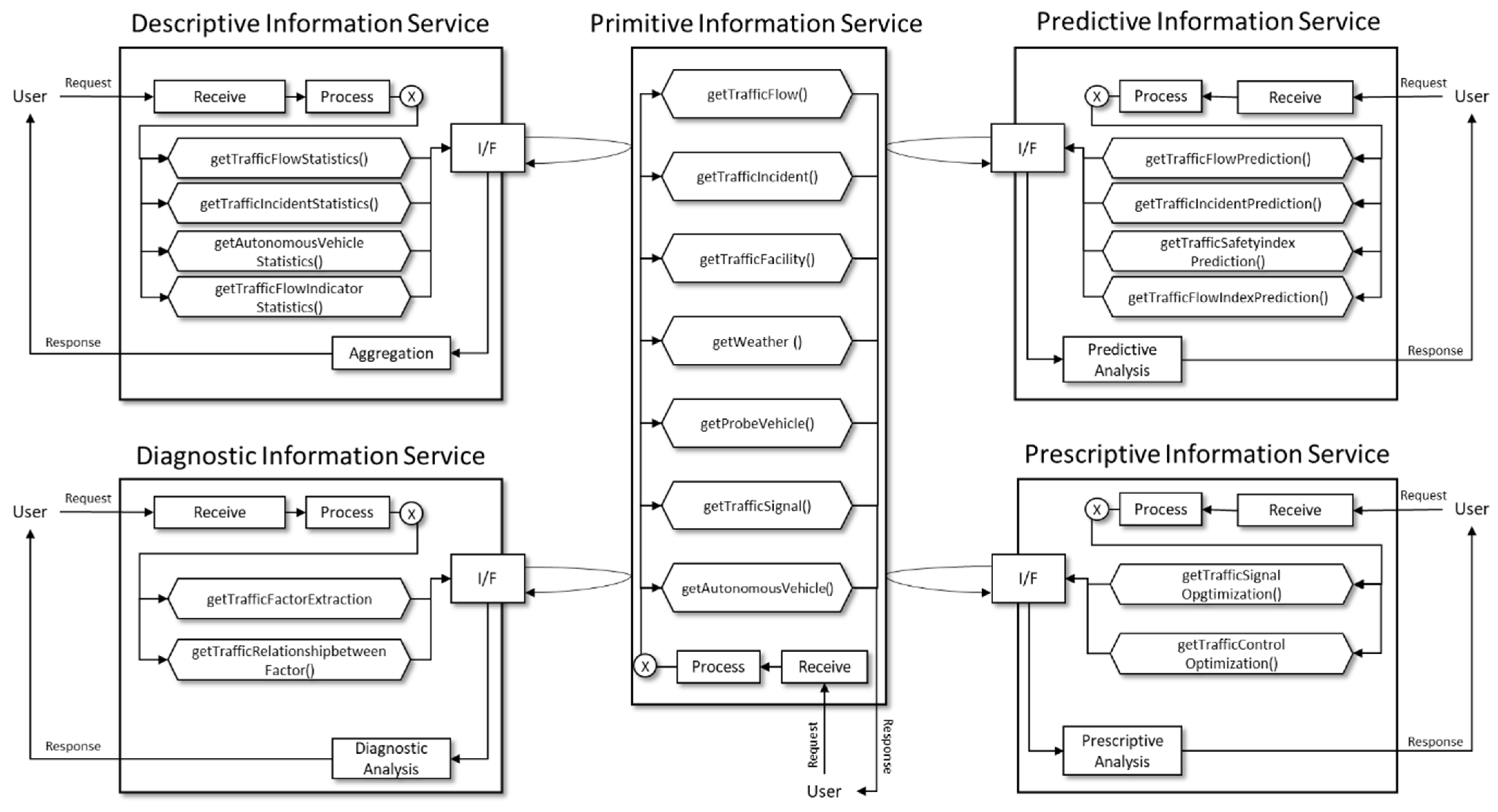
4.1. Derivation of Services
4.2. Modeling of Services

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Primitive Information Service | |
| Description | A service consisting of operations that provide predefined types of AV-mixed Traffic Information | |
| Operation | Input | Output |
| getTrafficFlow() | , , , | |
| getTrafficIncident() | ||
| getTrafficFacility() | ||
| getWeather() | ||
| getProbeVehicle() | ||
| getTrafficSignal() | ||
| getAutonomousVehicle() | ||
| Name | Descriptive Information Service | |
| Description | A service providing descriptive statistics | |
| Operation | Input | Output |
| getTrafficFlowStatistics() | [, , , | |
| getTrafficIncidentStatistics() | ||
| getAutonomousVehicleStatistics() | ||
| getTrafficFlowIndexStatistics() | ||
| Name | Diagnostic Information Service | |
| Description | A service providing the results of diagnostic analysis <{}> {} | |
| Operation | Input | Output |
| getTrafficFactorExtraction() | , , , | |
| getTrafficRelationshipBetweenFactors() | , , , | |
| Name | Predictive Information Service | |
| Description | A service that provides predicted value | |
| Operation | Input | Output |
| getTrafficFlowPrediction() | , , | |
| getTrafficIncidentPrediction() | ||
| getTrafficSafetyindexPrediction() | ||
| getTrafficFlowIndexPrediction() | ||
| Name | Prescriptive Information Service | |
| Description | A service that provides optimal solutions for signal and lane operations. | |
| Operation | Input | Output |
| getTrafficSignalOptimization() | , , , | |
| getTrafficControlOptimization() | ||
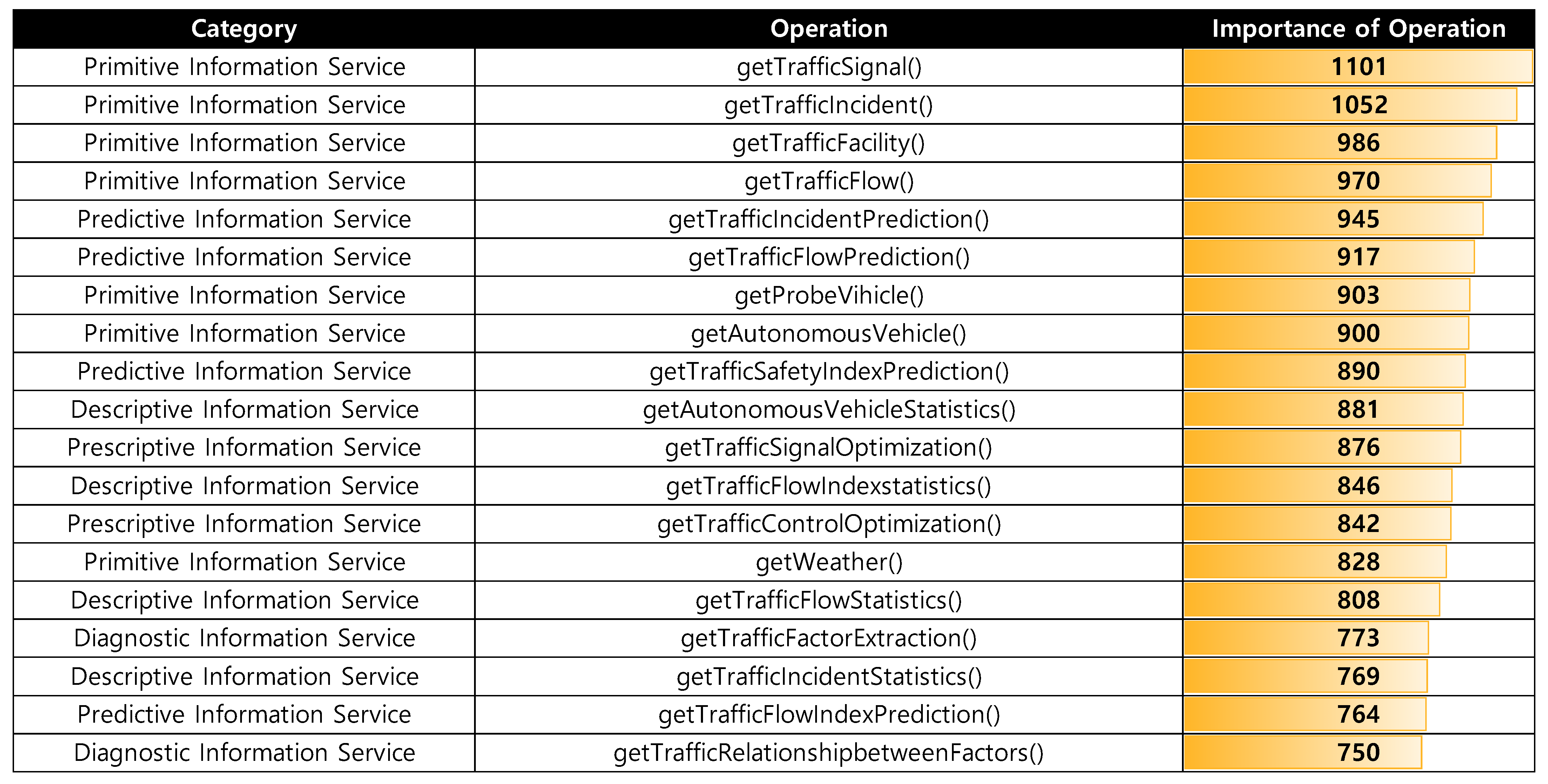
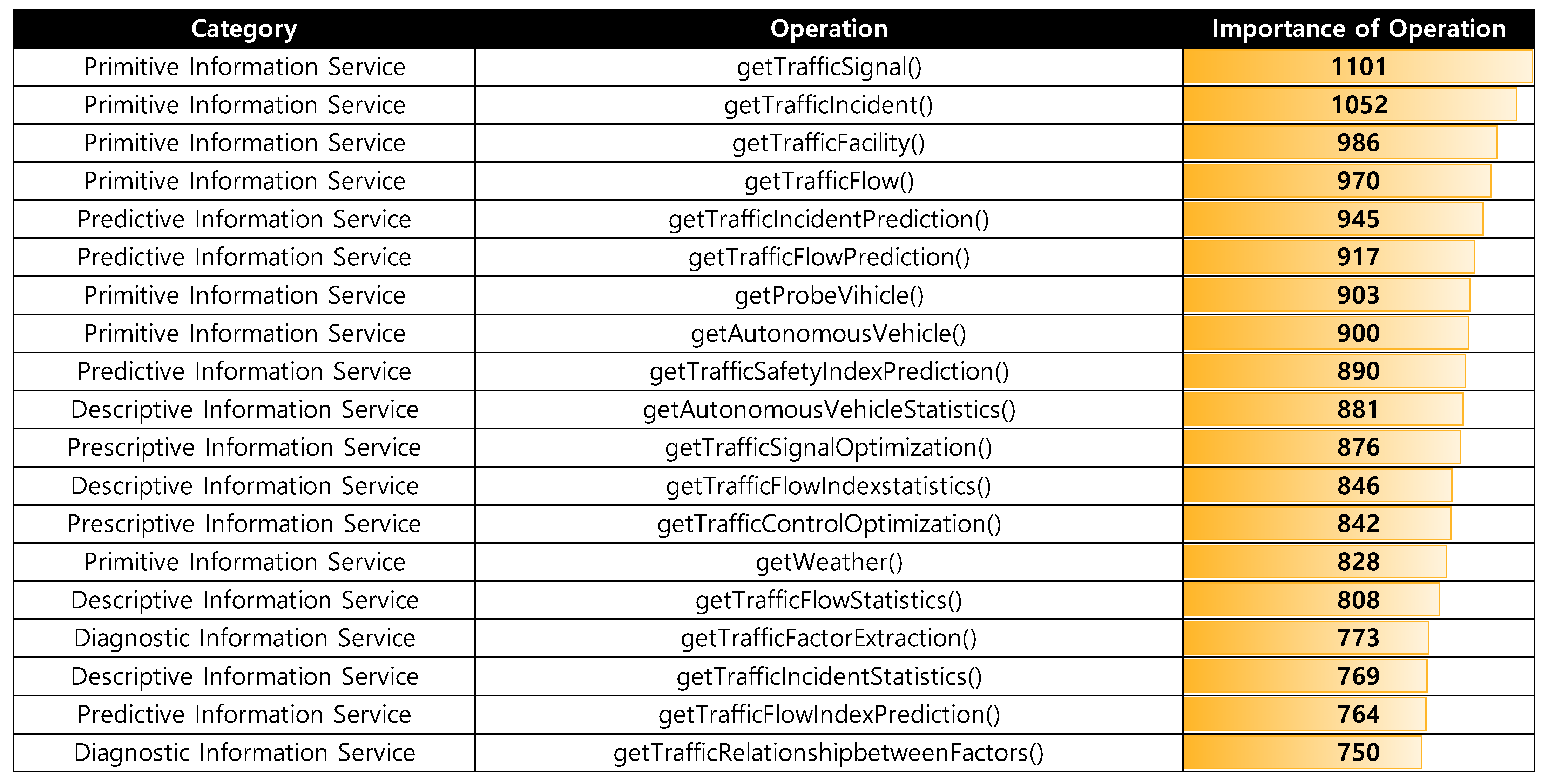
4.3. Evaluation of the Importance of Service Operations
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A survey of autonomous driving: Common practices and emerging technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- J3016_201401; Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle Automated Driving Systems. SAE International: Warrendale, PA, USA, 2014; pp. 1–12.
- Naveen, M.K.; Lokesh, M.; Varma, K.N.J.L.; Teja, P.S.V. A Review On Autonomous Vehicles And Its Components. J. Pharm. Negat. Results. 2023, 13, 6916–6922. [Google Scholar]
- Badue, C.; Guidolini, R.; Carneiro, R.V.; Azevedo, P.; Cardoso, V.B.; Forechi, A.; De Souza, A.F. Self-driving cars: A survey. Expert Syst. Appl. 2021, 165, 113816. [Google Scholar] [CrossRef]
- Malik, S.; Khan, M.A.; El-Sayed, H. Collaborative autonomous driving—A survey of solution approaches and future challenges. Sensors 2021, 21, 3783. [Google Scholar] [CrossRef] [PubMed]
- Zhu, F.; Lv, Y.; Chen, Y.; Wang, X.; Xiong, G.; Wang, F.Y. Parallel transportation systems: Toward IoT-enabled smart urban traffic control and management. IEEE Trans. Intell. Trans. Syst. 2019, 21, 4063–4071. [Google Scholar] [CrossRef]
- Yang, Z.; Pun-Cheng, L.S. Vehicle detection in intelligent transportation systems and its applications under varying environments: A review. Image Vis. Comput. 2018, 69, 143–154. [Google Scholar] [CrossRef]
- Al-Dweik, A.; Muresan, R.; Mayhew, M.; Lieberman, M. IoT-based multifunctional scalable real-time enhanced road side unit for intelligent transportation systems. In Proceedings of the 2017 IEEE 30th Canadian conference on electrical and computer engineering (CCECE), Windsor, ON, Canada, 30 April–3 May 2017; pp. 1–6. [Google Scholar]
- Eiter, T.; Füreder, H.; Kasslatter, F.; Parreira, J.X.; Schneider, P. Towards a semantically enriched local dynamic map. Int. J. Intell. Transp. Syst. Res. 2019, 17, 32–48. [Google Scholar] [CrossRef]
- Qureshi, K.N.; Abdullah, A.H. A survey on intelligent transportation systems. Middle-East J. Sci. Res. 2013, 15, 629–642. [Google Scholar]
- Ghosal, A.; Conti, M. Security issues and challenges in V2X: A survey. Comput. Netw. 2020, 169, 107093. [Google Scholar] [CrossRef]
- Iskandarova, S.; El-Tawab, S. System Leadership: Self-Driving Vehicles Regulation and the Role of Government. In Proceedings of the 2023 IEEE International Conference on Smart Mobility, Detroit, MI, USA, 17–19 May 2023; pp. 191–196. [Google Scholar]
- Zhang, R.; Zhong, W.; Wang, N.; Sheng, R.; Wang, Y.; Zhou, Y. The innovation effect of intelligent connected vehicle policies in China. IEEE Access 2022, 10, 24738–24748. [Google Scholar] [CrossRef]
- Force, E.T. Automated Driving Roadmap; European road Transport Research Advisory Council: Brussel, Belgium, 2015. [Google Scholar]
- Alanazi, F. Development of Smart Mobility Infrastructure in Saudi Arabia: A Benchmarking Approach. Sustainability 2023, 15, 3158. [Google Scholar] [CrossRef]
- Deemantha, R.G.S.; Hettige, B. Autonomous Car: Current Issues, Challenges and Solution: A Review. In Proceedings of the 15th International Research Conference, Beijing, China, 1–6 September 2019. [Google Scholar]
- Jun, W.K.; An, M.H.; Choi, J.Y. Impact of the connected & autonomous vehicle industry on the Korean national economy using input-output analysis. Technol. Forecast. Soc. Chang. 2022, 178, 121572. [Google Scholar]
- Bae, J.; Hur, N.; Choi, D.J. Study on mobile TV services for autonomous vehicles based on terrestrial broadcasting system incorporating broadcast core network. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), 26–28 October 2022; pp. 1–4. [Google Scholar]
- Kulabukhova, N. The Survey of Self-driving Car Challenges in Smart City Infrastructures. In Proceedings of the International Conference on Computational Science and Its Applications, Athens, Greece, 3–6 July 2023; pp. 290–301. [Google Scholar]
- ISO 14823; 2017 Intelligent Transport Systems–Graphic Data Dictionary. ISO: Geneva, Switzerland, 2017.
- Sakai, H.; Nishiyama, S. Activities toward International Standardization of Dynamic Maps. SIP Results Rep. 2018, 2018, 214–216. [Google Scholar]
- FHWA-JPO-13-046; Sumner, R.; Eisenhart, B.; Baker, J. SAE J2735 standard: Applying the systems engineering process. United States. Department of Transportation. Intelligent Transportation Systems Joint Program Office: Washington, DC, USA, 2013.
- Guo, X.Y.; Zhang, G.; Jia, A.F. Study on mixed traffic of autonomous vehicles and human-driven vehicles with different cyber interaction approaches. Veh. Commun. 2023, 39, 100550. [Google Scholar] [CrossRef]
- Mohajerpoor, R.; Ramezani, M. Mixed flow of autonomous and human-driven vehicles: Analytical headway modeling and optimal lane management. Transp. Res. Part C Emerg. Technol. 2019, 109, 194–210. [Google Scholar] [CrossRef]
- New York City Traffic Management Center. Available online: https://www.nyc.gov/html/dot/html/motorist/atis.shtml (accessed on 25 August 2023).
- Traffic Control Centre (VKRZ). Available online: https://www.berlin.de/sen/uvk/en/mobility-and-transport/traffic-management/traffic-control-centre (accessed on 25 August 2023).
- Kostakos, V.; Ojala, T.; Juntunen, T. Traffic in the smart city: Exploring city-wide sensing for traffic control center augmentation. In Proceedings of the IEEE Internet Computing, Washington, DC, USA, 5 December 2013; Volume 17, pp. 22–29. [Google Scholar]
- Kotsialos, A.; Vassilakopoulou, P. Fleet management enterprise systems and traffic control synergies: A literature review and research agenda. Procedia Comput. Sci. 2023, 219, 529–536. [Google Scholar] [CrossRef]
- Benmessaoud, Y.; Cherrat, L.; Ezziyyani, M. Real-Time Self-Adaptive Traffic Management System for Optimal Vehicular Navigation in Modern Cities. Computers 2023, 12, 80. [Google Scholar] [CrossRef]
- Japan Road Traffic Information Center. Available online: https://www.jartic.or.jp (accessed on 25 August 2023).
- National Transport Information Center. Available online: https://www.its.go.kr (accessed on 25 August 2023).
- Urban Traffic Information Center. Available online: https://www.utic.go.kr/main/main.do (accessed on 25 August 2023).
- Brakatsoulas, S.; Pfoser, D.; Tryfona, N. Modeling, storing and mining moving object databases. In Proceedings of the International Database Engineering and Applications Symposium, IDEAS′04, Washington, DC, USA, 7–9 July 2004; pp. 68–77. [Google Scholar]
- Du Mouza, C.; Rigaux, P. Mobility patterns. GeoInformatica 2005, 9, 297–319. [Google Scholar] [CrossRef]
- Güting, R.H.; De Almeida, V.T.; Ding, Z. Modeling and querying moving objects in networks. VLDB J. 2006, 15, 165–190. [Google Scholar] [CrossRef]
- Timko, I.; Pedersen, T.B. Capturing complex multidimensional data in location-based data warehouses. In Proceedings of the 12th Annual ACM International Workshop on Geographic Information Systems, Arlington, VA, USA, 12–13 November 2004; pp. 147–156. [Google Scholar]
- Jensen, C.S.; Kligys, A.; Pedersen, T.B.; Timko, I. Multidimensional data modeling for location-based services. In Proceedings of the 10th ACM international symposium on Advances in geographic information systems, McLean, VA, USA, 8–9 November 2002; pp. 55–61. [Google Scholar]
- Jensen, C.S.; Lu, H.; Yang, B. Graph model based indoor tracking. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009; pp. 122–131. [Google Scholar]
- Jensen, C.S.; Lu, H.; Yang, B. Indexing the trajectories of moving objects in symbolic indoor space. In Proceedings of the Advances in Spatial and Temporal Databases: 11th International Symposium, SSTD 2009, Aalborg, Denmark, 8–10 July 2009; Proceedings 11. pp. 208–227. [Google Scholar]
- Xu, J.; Güting, R.H. A generic data model for moving objects. GeoInformatica 2013, 17, 125–172. [Google Scholar] [CrossRef]
- Maoz, M. How IT should deepen big data analysis to support customer-centricity, ID: G00248980, Gartner, 26 June 2013. Available online: https://www.gartner.com/en/documents/2531116/how-it-should-deepenbig-data-analysis-tosupport-custom (accessed on 25 February 2022).
- Groggert, S.; Wenking, M.; Schmitt, R.H.; Friedli, T. Status quo and future potential of manufacturing data analytics—An empirical study. In Proceedings of the 2017 IEEE International Conference on Industrial Engineering and Engineering Management (IEEM), Singapore, 10–13 December 2017; pp. 779–783. [Google Scholar]
- Motlagh, N.H.; Zaidan, M.A.; Lovén, L.; Fung, P.L.; Hänninen, T.; Morabito, R.; Tarkoma, S. Digital Twins for Smart Spaces-Beyond IoT Analytics. IEEE Internet Things J. 2023. [Google Scholar] [CrossRef]
- Uskov, V.L.; Bakken, J.P.; Shah, A.; Hancher, N.; McPartlin, C.; Gayke, K. Innovative InterLabs system for smart learning analytics in engineering education. In Proceedings of the 2019 IEEE Global Engineering Education Conference (EDUCON), Dubai, United Arab Emirates, 8–11 April 2019; pp. 1363–1369. [Google Scholar]
- Wang, D.; Miwa, T.; Morikawa, T. Big trajectory data mining: A survey of methods, applications, and services. Sensors 2020, 20, 4571. [Google Scholar] [CrossRef] [PubMed]

| Index | Object | Time | Location | Attributes of (Object × Time × Location) | |
|---|---|---|---|---|---|
| Moving | Unmovable | ||||
| This study | O | O | O | O | O (State of moving and unmovable objects, such as speed of vehicles and signal of traffic lights) |
| [33] | O | X | O | O | O (Speed of moving objects) |
| [34] | O | X | O | O | X |
| [35] | O | X | O | O | O (Speed of moving objects) |
| [36] | O | X | O | O | O (Speed and direction of moving objects) |
| [37] | O | X | O | O | X |
| [38] | O | X | O | O | X |
| [39] | O | X | O | O | X |
| [40] | O | X | O | O | O (Duration time of moving objects) |
| Type | ||||
|---|---|---|---|---|
| Traffic Flow () | , | |||
| Traffic Incident () | , | , , , | ||
| Traffic Facility () | , | |||
| Weather () | , | |||
| Probe Vehicle () | , | |||
| Traffic Signal () | ||||
| Autonomous Vehicle () | , |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, D.-H.; Choi, S.-S.; Kang, Y.-S. Modeling of Traffic Information and Services for the Traffic Control Center in Autonomous Vehicle-Mixed Traffic Situations. Appl. Sci. 2023, 13, 10719. https://doi.org/10.3390/app131910719
Yang D-H, Choi S-S, Kang Y-S. Modeling of Traffic Information and Services for the Traffic Control Center in Autonomous Vehicle-Mixed Traffic Situations. Applied Sciences. 2023; 13(19):10719. https://doi.org/10.3390/app131910719
Chicago/Turabian StyleYang, Dong-Hyuk, Sung-Soo Choi, and Yong-Shin Kang. 2023. "Modeling of Traffic Information and Services for the Traffic Control Center in Autonomous Vehicle-Mixed Traffic Situations" Applied Sciences 13, no. 19: 10719. https://doi.org/10.3390/app131910719
APA StyleYang, D.-H., Choi, S.-S., & Kang, Y.-S. (2023). Modeling of Traffic Information and Services for the Traffic Control Center in Autonomous Vehicle-Mixed Traffic Situations. Applied Sciences, 13(19), 10719. https://doi.org/10.3390/app131910719