1.2. Background and Literature Review
A portion of the study involved a pantograph reliability analysis [
1]. The reliability indexes and reliability of the structural strength of pantographs were analyzed using simulated sample data extracted from Latin hypercube sampling with a single-arm pantograph as the object of study [
2]. Combining the rain flow counting method, the life prediction method and the reliability prediction method, the reliability analysis of the V500 pantograph was carried out, and the fatigue life results under different working intensities were predicted, which provided data support for the structure, material, design and operation management of the device [
3]. A dynamic model was developed for the pantograph of the TSG19 type, and the contact stresses were analyzed to obtain the fatigue life and reliability of the component, and its structural model was analyzed based on the stress data.
Currently, there are fewer studies on pantograph reliability alone, and most of them are based on structural reliability rather than actual operation data. Therefore, this paper will draw on the data-driven [
4] reliability research method to study the dynamic reliability of pantographs.
Fault tree analysis (FTA) is a powerful tool for assessing the reliability of complex systems [
5]. When using the traditional fault tree analysis method to analyze the reliability of pantograph systems, in addition to the common problem of few component failure data and difficulty in calculating the failure rate, there is also the problem that the failure states are only based on two-state assumptions and cannot accommodate the multiple failure states that exist in the practical system. Therefore, the T-S fuzzy fault tree analysis method is generated [
6] by introducing the fuzzy theory and uses fuzzy numbers to describe the failure rate and failure probability; the polymorphic representation of fault states is realized by T-S gates in the T-S fault tree. When using the T-S fuzzy fault tree for reliability assessment, a large number of calculations are generated when finding the top event state (forward inference), and reverse inference is not possible. In addition, the fault tree analysis method is not suitable for dynamic reliability analysis of the system, which leads to its limitation in practical engineering applications. Many studies have applied optimized fault trees to reliability analysis. Rania A. et al. [
7] Introduced the concept of Dynamic fault tree (DFT) by defining additional gates (called dynamic gates) on the traditional fault tree, which overcame the shortcomings of the traditional static fault tree in not being able to adequately simulate the dynamic failures of a complex system and effectively assessed the reliability of real complex systems. In [
8], an extended approach for collaborative data-driven fault tree analysis (DDFTA) of a system is presented, which extracts repairable fault trees from time series data streaming from multiple systems/machines sharing similar functionalities. This method is not limited to binary (two states) components nor to exponential distributions. Iram Akhtar et al. [
9] proposed fault tree analysis based on fuzzy set theory and applied it to wind energy systems; this technique combines the effects of operational failures of wind energy system configurations and errors in fuzzy environments using fuzzy risk indices combining probabilistic inaccuracy and engineering inaccuracy for greater flexibility and adaptability. Haonan Jiang et al. [
10] established a polymorphic fuzzy fault tree for the high-voltage power battery system of a pure electric commercial vehicle based on the combination of polymorphic theory, fuzzy mathematical theory, group decision-making theory, and fault tree and carried out qualitative and quantitative analyses to determine the system’s weak links. In [
11], the dynamic reliability model of the hydraulic system is established by using the continuous-time T-S Dynamic fault tree to solve the fault rate of the system, and the results are compared with the traditional analysis method and the probability importance and key importance of the system unit are calculated.
Bayesian networks (BN) are increasingly used in system safety and reliability analysis [
12]. As a graphical inference method, Bayesian networks represent the causal relationships between events. A BN has some characteristics and advantages over reliability methods such as fault tree analysis, Petri nets, Markov chains, etc. A BN can be used to predict the probability of unknown variables or update the probe of known variables by evidence to achieve two-way reasoning [
13]. A dynamic Bayesian network (DBN) carries out extensions on dynamic attributes such as time based on a BN [
14] and combined with the state transfer probability table of the components to establish a dynamic reliability model of the system, giving full play to the advantages of BN while achieving dynamic reliability analysis of the system [
15]. BN construction focuses on determining the network structure and conditional probability table. The usual method is to transform the traditional FT model of the system into a BN model to achieve BN construction, but some drawbacks in the traditional FT still pass into the BN. Due to the power of Bayesian networks, they have a wide range of applications in the field of reliability analysis. In [
16], the author proposes a Bayesian network modeling framework that systematically combines design life estimates, operational data, and expert judgment for the reliability prediction of aircraft subsystems. The model predicts the reliability of a large aircraft fleet by using failure and maintenance data provided by a large fleet operator. In [
17], reliability characteristics such as failure probability, failure rate, and mean time to failure of the floating offshore wind turbine are determined according to the Bayesian network predictive analysis. In [
18], the fault tree mapping dynamic Bayesian network (DBN) method is applied to the reliability research study of centrifugal compressor units, and its usability and reliability are evaluated dynamically. In [
19], in order to deal with epistemic uncertainty and dynamic characteristics in the reliability assessment process of controllable pitch propeller hydraulic systems, the D-S evidence theory and dynamic Bayesian network were applied to establish a novel approach for assessing its reliability and availability. In [
20], to deal with the uncertain knowledge and various information in the safety assessment, characteristic indicators are extracted from marine environment systems and discretized with the Cloud model. The dynamic evaluation and risk zoning of navigation safety is realized based on Bayesian probabilistic reasoning and Dempster–Shafer (DS) evidence theory. In [
21], the author develops a new dynamic Bayesian network (DBN) framework for fault diagnosis and reliability analysis of OWT gearbox systems by incorporating components’ degradation information and a condition-based maintenance (CBM) strategy. The reliability, availability, and mean time between failures (MTBF), as well as the failure criticality index (FCI) for each subassembly, are estimated.
1.3. Paper Organization
In response to the above problems, a reliability assessment method of a pantograph system based on the T-S polymorphic fault tree and dynamic Bayesian network is proposed. The T-S multistate fault tree is utilized to solve the problem that the fault states are only based on the two-state assumption, and multiple fault states cannot exist [
22]. The fuzzy theory is used to obtain the T-S gate rule probability parameter in the T-S polymorphic fault tree to characterize the uncertainty of the causal relationship between events [
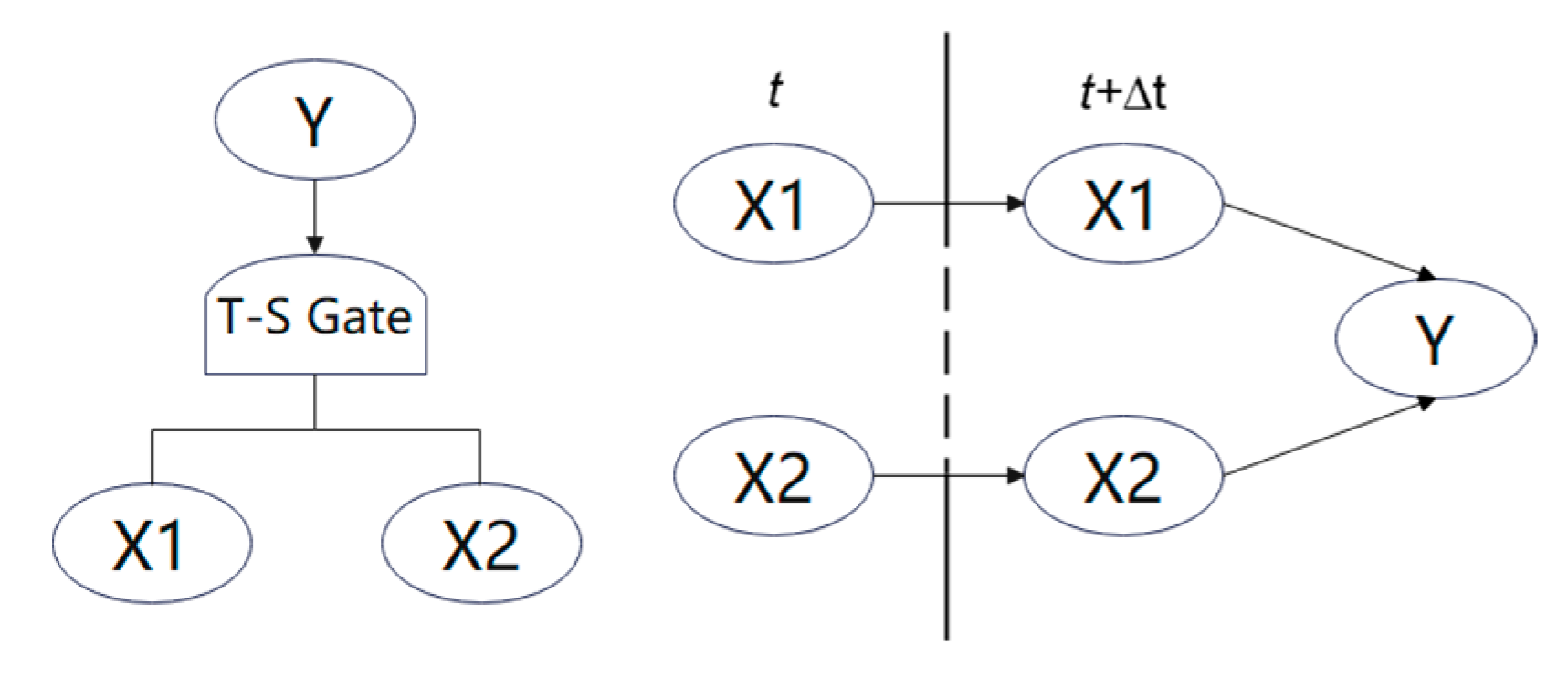
6]. Moreover, constructing Bayesian networks using T-S polymorphic fault trees addresses the shortcomings of traditional fault tree construction of Bayesian networks [
18]. Additionally, using Bayesian networks for bidirectional inference to solve the problem of T-S polymorphic fault tree forward inference is computationally complex and unable to reverse inference [
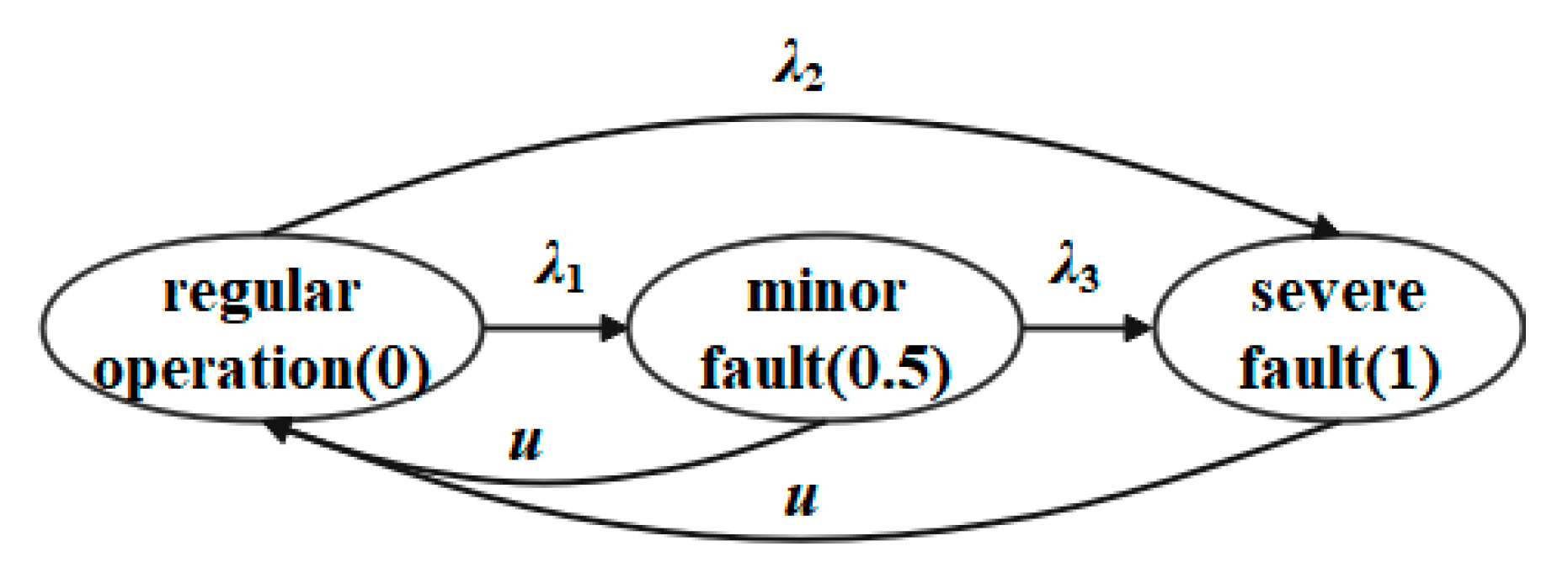
23]. A dynamic Bayesian network is constructed using a Bayesian network and the multistate transfer probability table to realize the dynamic reliability analysis of a pantograph system, and it is verified that the system can effectively improve reliability by adopting preventive maintenance on the basis of the original maintenance strategy. The objective of this study is to propose a dynamic reliability assessment method for the dynamic characteristics of pantograph systems, including dynamic interactions, time dependence, and uncertainty of causality, so as to provide a reference for the pre-functional design and subsequent maintenance of pantograph systems.
The rest of the paper is structured as follows:
Section 2 presents a system reliability analysis model based on the T-S polymorphic fault tree and the dynamic Bayesian network.
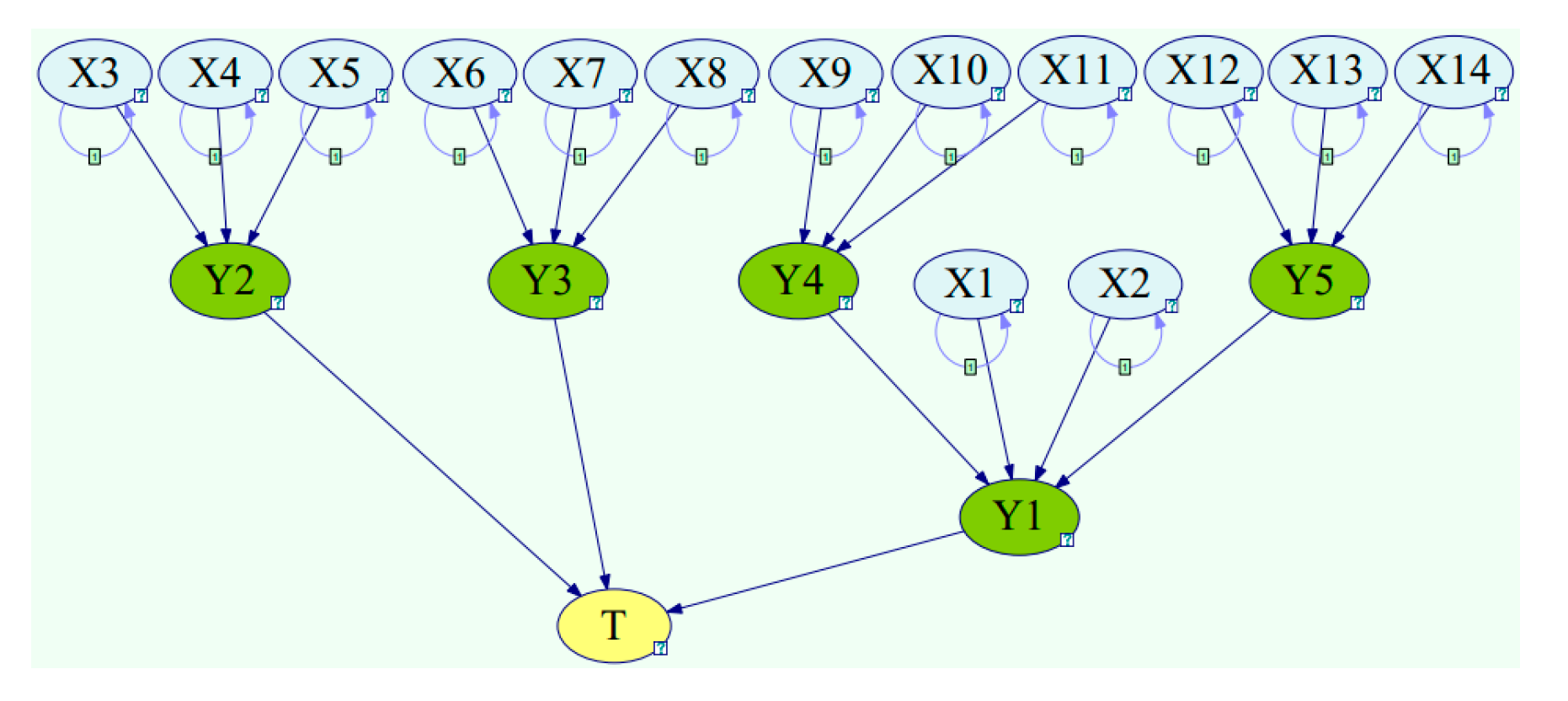
Section 3 takes the pantograph as the object for modeling. Specific analysis results and conclusions are presented in
Section 4 and
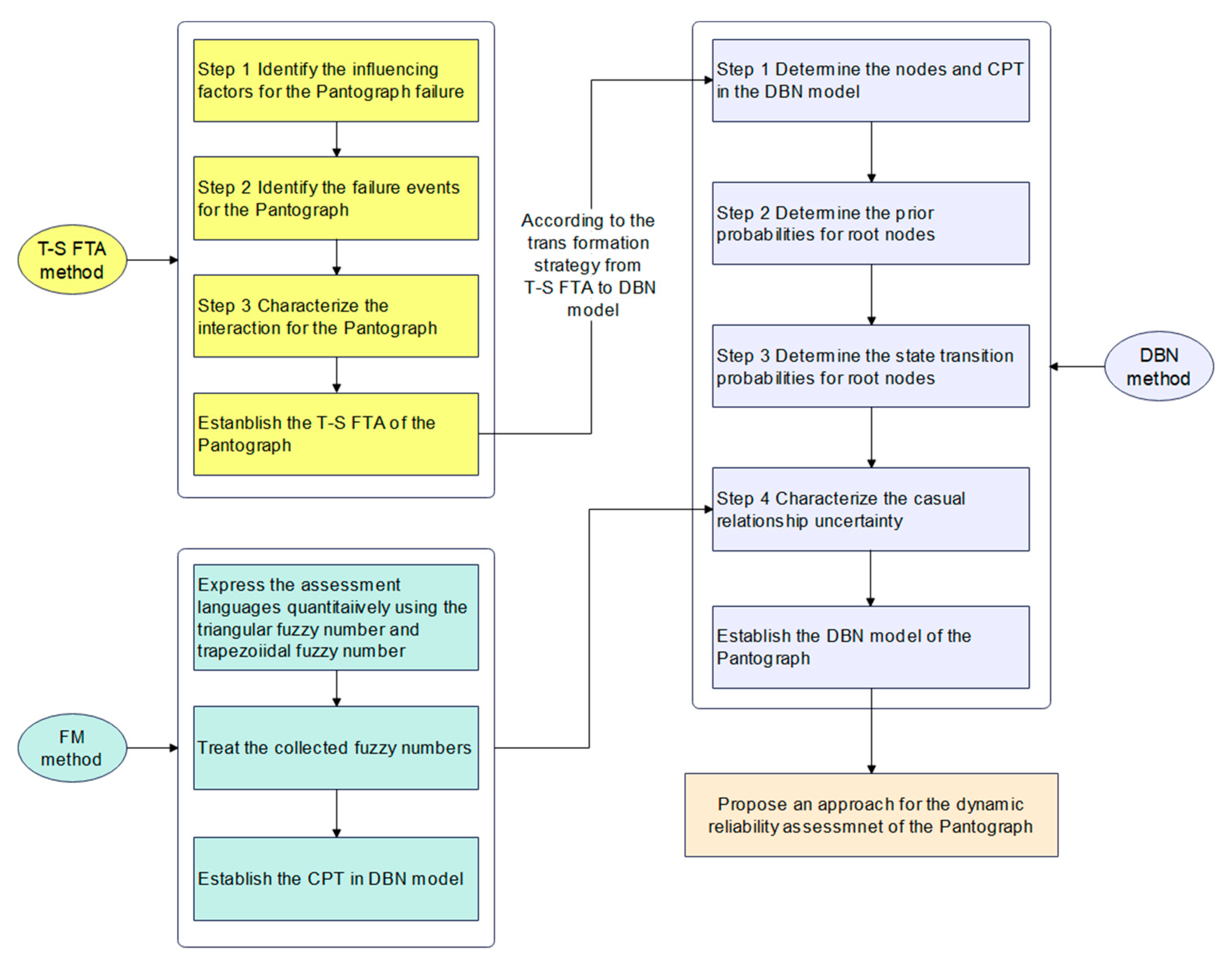
Section 5. The theoretical framework of the dynamic reliability assessment method for pantographs is established using FTA, DBN, and FM methods, as shown in
Figure 1.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}