
Influence of Variable Height of Piers on the Dynamic Characteristics of High-Speed Train–Track–Bridge Coupled Systems in Mountainous Areas



 ,
, 
Abstract
:1. Introduction
2. Train–Track–Bridge Coupled Vibration Model
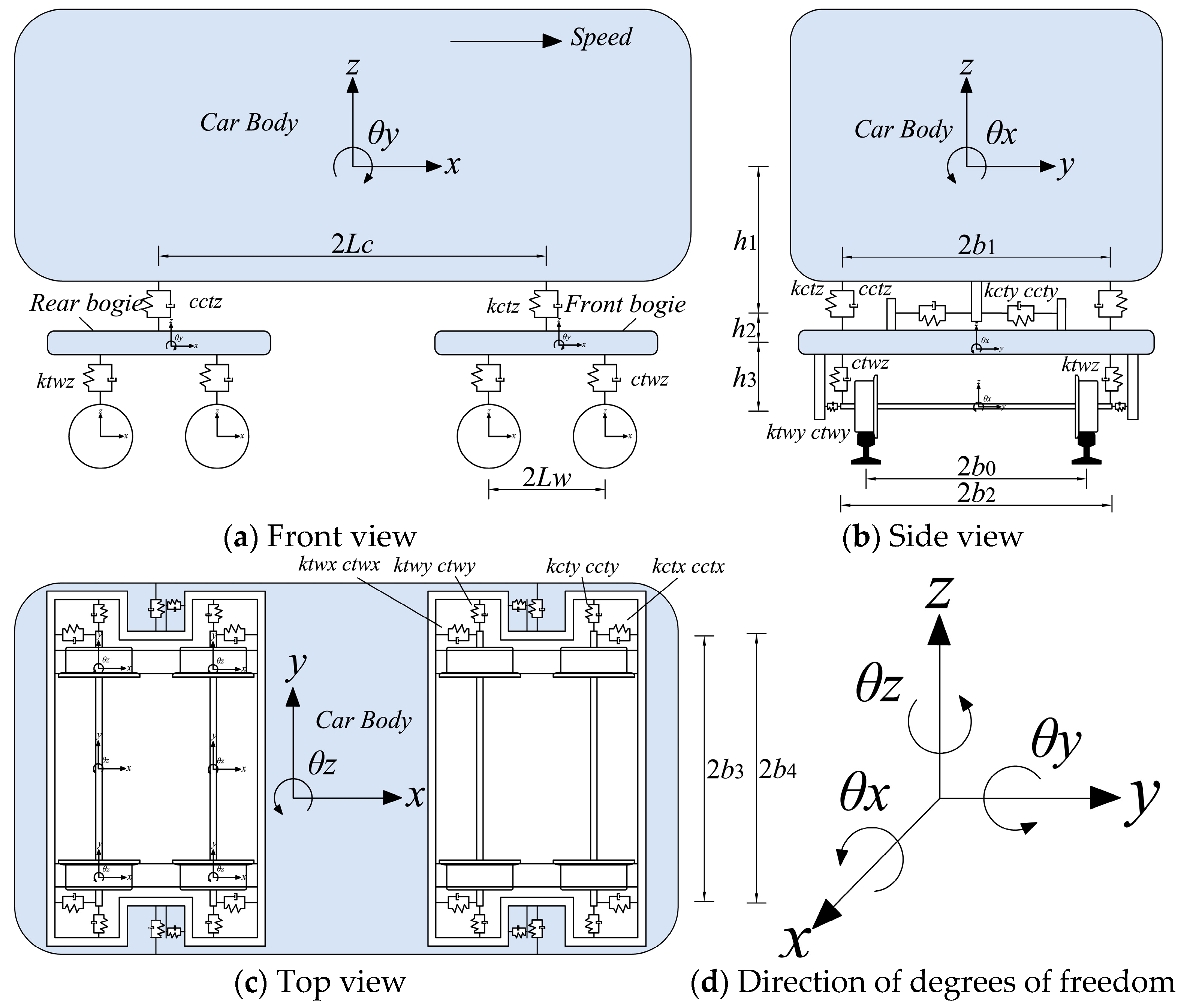
2.1. Train Model
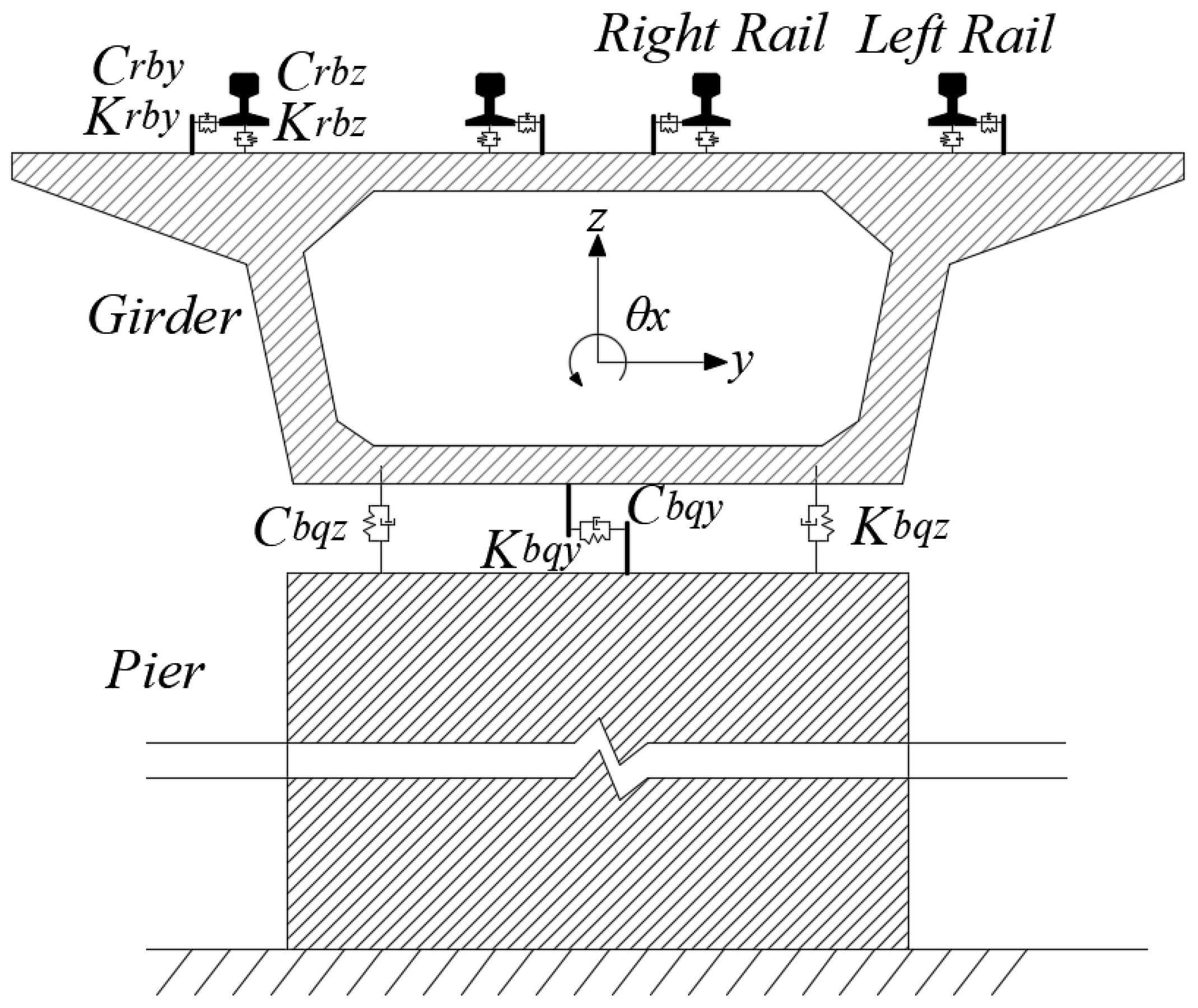
2.2. Track and Bridge Model
2.3. Rail Irregularity
2.4. Train–Track–Bridge Coupled Vibration
2.5. Equation Solving of System Coupled Vibration
3. Analysis and Calculation Parameters
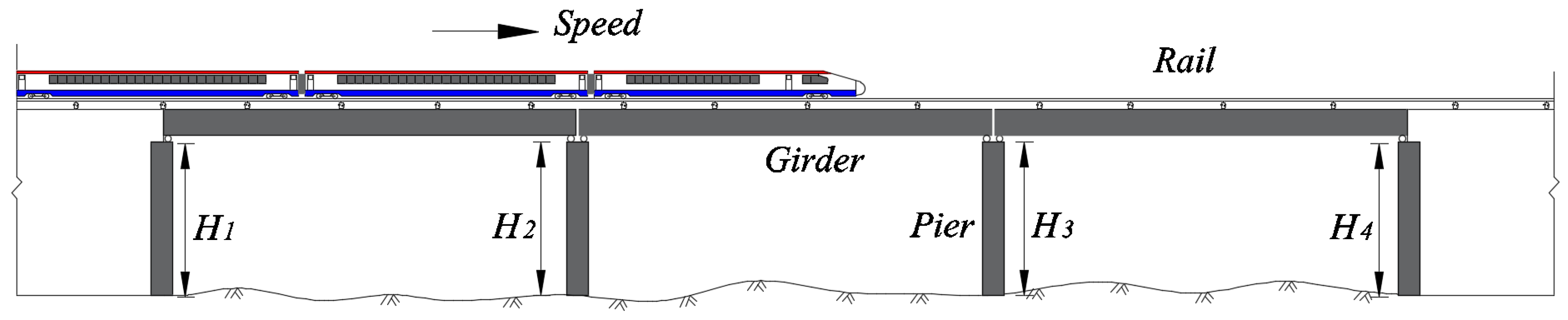
3.1. Research Scenario
3.2. Pier Height Working Condition
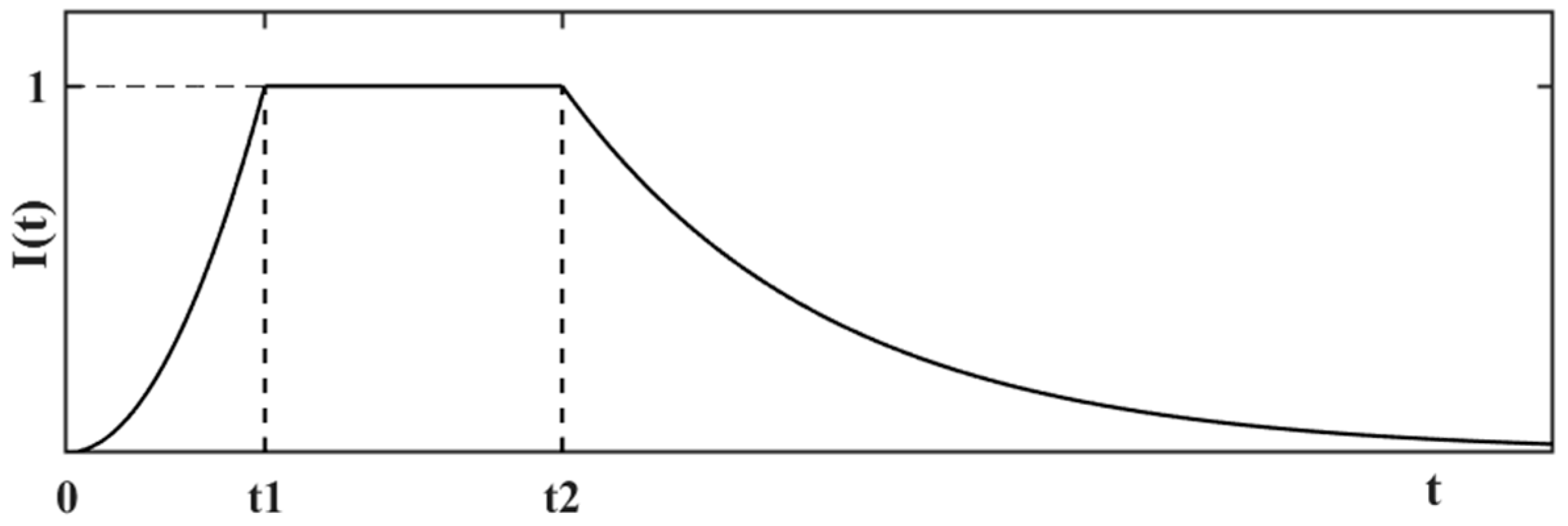
3.3. Earthquake Excitation Model
- (1)
- Class I site soil: rocky, compact gravelly soil.
- (2)
- Class Ⅱ site soil: medium-dense, loose gravel soil, dense, medium-dense gravel, coarse and medium sand; clayey soil with foundation soil with a permissible bearing capacity > 150 kPa.
- (3)
- Class Ⅲ site soil: loose gravel, coarse and medium sand, dense and medium-dense fine and silty sand, clayey soil with a permissible bearing capacity [σ0] ≤ 150 kPa and fill soil with ≥ 130 kPa.
- (4)
- Class Ⅳ site soil: silty soil, loose fine and chalky sand, recently deposited clayey soil; fill with foundation soil with an allowable bearing capacity < 130 kPa.
4. Dynamic Response of the System
4.1. Validation of the System
4.2. Train Running Safety Indicators
4.2.1. Derailment Coefficient
4.2.2. Rate of Wheel Load Reduction
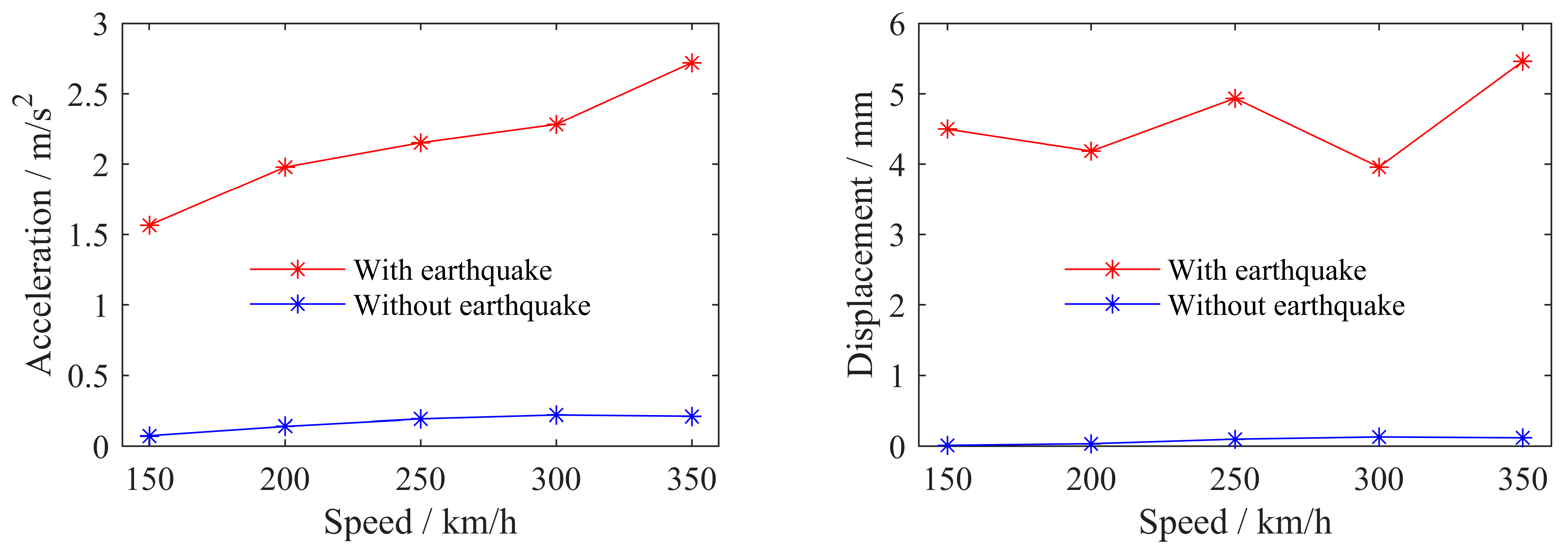
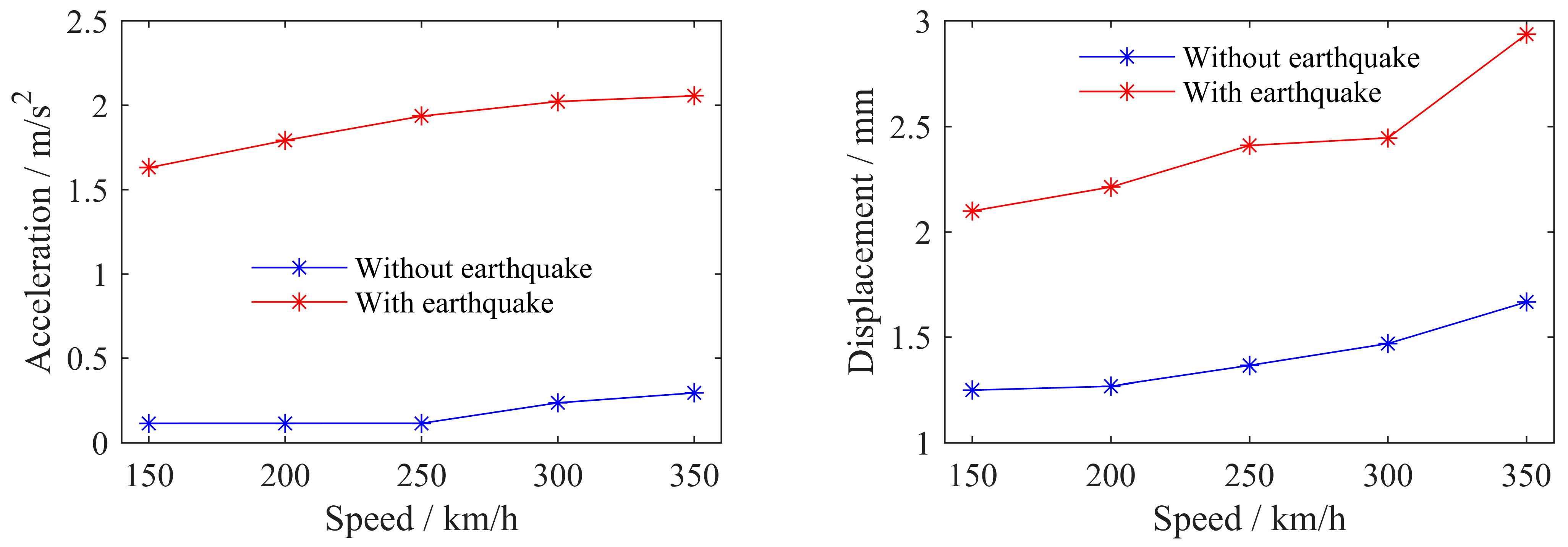
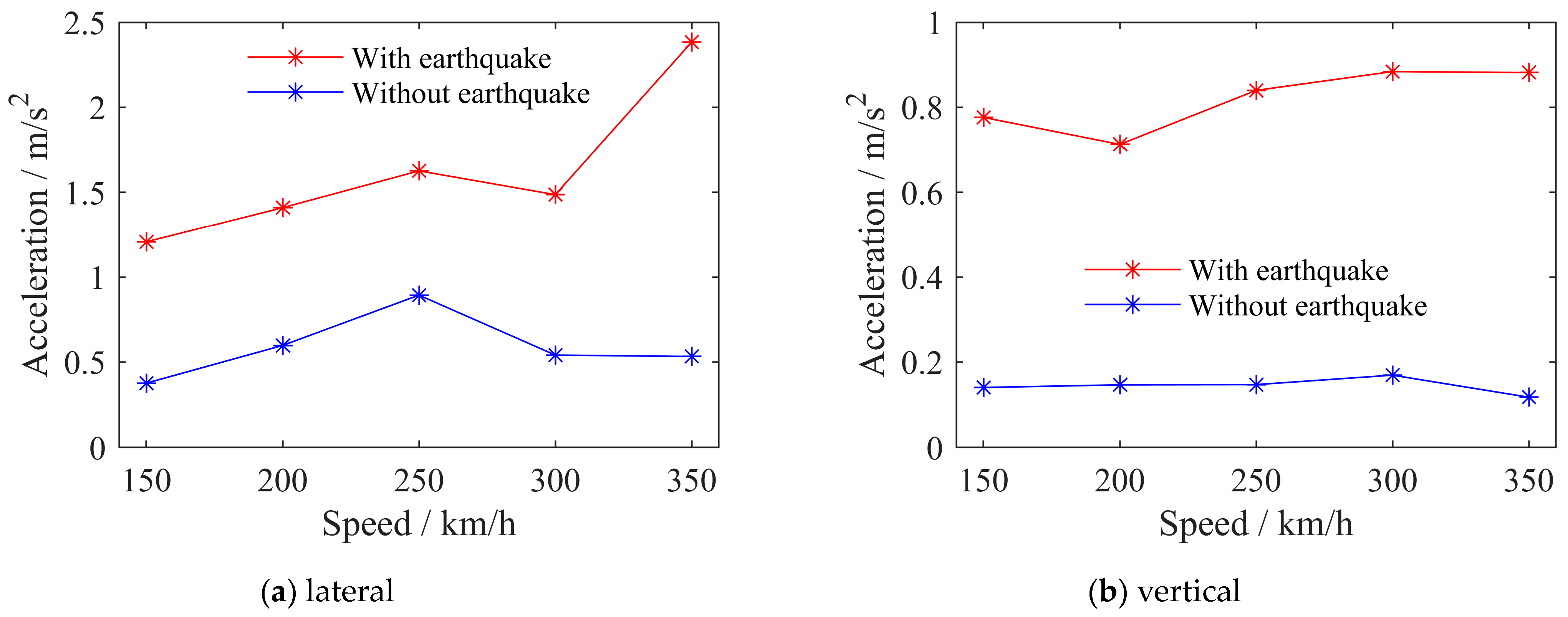
4.3. The Influence of Train Speed on System Dynamic Response
4.4. The Influence of Pier Height on System Dynamic Response
5. Conclusions
- (1)
- The dynamic response of the system and the safety index of the train generally increase with the increase in the train running speed.
- (2)
- Under seismic excitation, the dynamic response of the system is significantly increased, and the lateral dynamic response of the system is more affected by seismic excitation than the vertical response.
- (3)
- Compared to equal-height piers, the peak lateral dynamic response of the system with unequal-height piers (gradually increasing) decreases, which is beneficial for stabilizing the vehicle body. The peak lateral dynamic response of the system with unequal-height piers (steep increase in pier height) increases sharply, seriously reducing passenger comfort.
- (4)
- The vertical dynamic response of trains under two unequal-height pier conditions increases, and the safety indicators of equal-height piers are significantly better than the two unequal-height pier conditions. The recommended design is the optimal choice for equal-height bridge piers, followed by gradually increasing pier heights, and avoiding steep increases in pier heights.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Souza, E.F.; Bragança, C.; Meixedo, A.; Ribeiro, D.; Bittencourt, T.N.; Carvalho, H. Drive-by Methodologies Applied to Railway Infrastructure Subsystems: A Literature Review—Part I: Bridges and Viaducts. Appl. Sci. 2023, 13, 6940. [Google Scholar] [CrossRef]
- Arvidsson, T.; Andersson, A.; Karoumi, R. International journal of rail transportation train running safety on non-ballasted bridges train running safety on non-ballasted bridges. Int. J. Rail Transp. 2019, 7, 1–22. [Google Scholar] [CrossRef]
- Zhai, W.; Han, Z.; Chen, Z.; Ling, L.; Zhu, S. Train–track–bridge dynamic interaction: A state-of-the-art review. Veh. Syst. Dyn. 2019, 57, 984–1027. [Google Scholar] [CrossRef]
- Biggs, J.M. Introduction to Structural Dynamics; McGraw-Hill Book Company: New York, NY, USA, 1964; pp. 23–32. [Google Scholar]
- Liu, W.K.; Li, S.; Park, H.S. Eighty Years of the Finite Element Method: Birth, Evolution, and Future. Arch. Comput. Methods Eng. 2022, 29, 4431–4453. [Google Scholar] [CrossRef]
- Matsuura, A. Dynamic behavior of bridge girder for high speed railway bridge. Q. Rep. RTRI 1979, 20, 70–76. [Google Scholar]
- Chu, K.-H.; Dhar Chaman, L.; Garg Vijay, K. Railway-Bridge Impact: Simplified Train and Bridge Model. J. Struct. Div. 1979, 105, 1823–1844. [Google Scholar] [CrossRef]
- Dhar, C.L. A method of computing railway bridge impact. Diss. Abstr. Int. 1978, 39-08, 3947. [Google Scholar]
- Liu, H.; Wang, P.; Wei, X.; Xiao, J.; Chen, R. Longitudinal Seismic Response of Continuously Welded Track on Railway Arch Bridges. Appl. Sci. 2018, 8, 775. [Google Scholar] [CrossRef]
- Zhao, H.; Wei, B.; Jiang, L.; Xiang, P.; Zhang, X.; Ma, H.; Xu, S.; Wang, L.; Wu, H.; Xie, X. A velocity-related running safety assessment index in seismic design for railway bridge. Mech. Syst. Signal Process. 2023, 198, 110305. [Google Scholar] [CrossRef]
- Yang, Y.B.; Wu, Y.S. Dynamic stability of trains moving over bridges shaken by earthquakes. J. Sound Vib. 2002, 258, 65–94. [Google Scholar] [CrossRef]
- Hujun, L.; Xiaozhen, L.; Yan, Z. Train running safety analysis of high-pier rigid frame bridge under earthquake action. In Proceedings of the 9th International Conference on Structural Dynamics, EURODYN 2014, Porto, Portugal, 30 June 2014; pp. 1267–1272. [Google Scholar]
- Xiang, P.; Ma, H.; Zhao, H.; Jiang, L.; Xu, S.; Liu, X. Safety analysis of train-track-bridge coupled braking system under earthquake. Structures 2023, 53, 1519–1529. [Google Scholar] [CrossRef]
- Xiang, P.; Huang, W.; Jiang, L.Z.; Lu, D.G.; Liu, X.; Zhang, Q. Investigations on the influence of prestressed concrete creep on train-track-bridge system. Constr. Build. Mater. 2021, 293, 123504. [Google Scholar] [CrossRef]
- Zeng, Y.; Zheng, H.; Jiang, Y.; Ran, J.; He, X. Modal Analysis of a Steel Truss Girder Cable-Stayed Bridge with Single Tower and Single Cable Plane. Appl. Sci. 2022, 12, 7627. [Google Scholar] [CrossRef]
- Han, Y.; Xia, H.; Guo, W.-W. Dynamic response of cable-stayed bridge to running trains and earthquakes. Eng. Mech. 2006, 23, 93. [Google Scholar]
- Guo, J.; Zhong, J.; Dang, X.; Yuan, W. Seismic Responses of a Cable-Stayed Bridge with Consideration of Uniform Temperature Load. Appl. Sci. 2016, 6, 408. [Google Scholar] [CrossRef]
- Variyavwala, J.P.; Desai, A.K. Evaluation of Train Running Safety on Railway Cable-Stayed Bridge During Seismic Excitation. Int. J. Struct. Stab. Dyn. 2023, 23, 2350066. [Google Scholar] [CrossRef]
- Zhai, W.; Wang, S. Influence of bridge structure stiffness on the dynamic performance of high-speed train-track-bridge coupled system. Zhongguo Tiedao Kexue/China Railw. Sci. 2012, 33, 19–26. [Google Scholar] [CrossRef]
- Chao, C.; Liang, L.; Zhai, W. Dynamic Response of High-Speed Train Subjected to Stiffness Degradation of Simply Supported Bridge. In Proceedings of the 2nd International Conference on Rail Transportation, ICRT 2021, Chengdu, China, 5–6 July 2021; pp. 134–145. [Google Scholar]
- Fan, X.; Liu, L.; Wang, X.; Cao, J.; Cheng, W. Vibration Response Analysis of Overhead System Regarding Train-Track-Bridge Dynamic Interaction. Appl. Sci. 2022, 12, 9053. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Cai, C.; Sun, Y. Safety threshold of high-speed railway pier settlement based on train-track-bridge dynamic interaction. Sci. China Technol. Sci. 2015, 58, 202–210. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Tian, G. Study on the safe value of multi-pier settlement for simply supported girder bridges in high-speed railways. Struct. Infrastruct. Eng. 2018, 14, 400–410. [Google Scholar] [CrossRef]
- Chen, Z.; Zhai, W.; Yin, Q. Analysis of structural stresses of tracks and vehicle dynamic responses in traintrackbridge system with pier settlement. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2018, 232, 421–434. [Google Scholar] [CrossRef]
- Zhang, X.; Shan, Y.; Yang, X. Effect of Bridge-Pier Differential Settlement on the Dynamic Response of a High-Speed Railway Train-Track-Bridge System. Math. Probl. Eng. 2017, 2017, 8960628. [Google Scholar] [CrossRef]
- Gou, H.; Liu, C.; Hua, H.; Bao, Y.; Pu, Q. Mapping relationship between dynamic responses of high-speed trains and additional bridge deformations. JVC/J. Vib. Control 2021, 27, 1051–1062. [Google Scholar] [CrossRef]
- Feng, Y.-L.; Jiang, L.-Z.; Chen, M.-C.; Zhou, W.-B.; Liu, X.; Zhang, Y.-T. Deformation compatibility relationship of track interlayer with uneven settlement of side pier of continuous girder bridge and its dynamic application. Gongcheng Lixue/Eng. Mech. 2021, 38, 179–190. [Google Scholar] [CrossRef]
- Xu, L.; Yu, Z.; Shan, Z. Numerical simulation for traintrackbridge dynamic interaction considering damage constitutive relation of concrete tracks. Arch. Civ. Mech. Eng. 2021, 21, 116. [Google Scholar] [CrossRef]
- Jiang, L.; Liu, X.; Xiang, P.; Zhou, W. Train-bridge system dynamics analysis with uncertain parameters based on new point estimate method. Eng. Struct. 2019, 199, 109454. [Google Scholar] [CrossRef]
- Zhai, W. Development of vehicle-track coupled dynamics theory and engineering practice. Kexue Tongbao/Chin. Sci. Bull. 2022, 67, 3793–3807. [Google Scholar] [CrossRef]
- Xu, L.; Lu, T. Influence of the finite element type of the sleeper on vehicle-track interaction: A numerical study. Veh. Syst. Dyn. 2021, 59, 1533–1556. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, X.-Q.; Ma, Y.-F. Coupling vibration of vehicle-bridge system. Appl. Math. Mech. 2004, 25, 390–395. [Google Scholar] [CrossRef]
- Li, X.-Z.; Zhang, L.-M.; Zhang, J. State-of-the-art review and trend of studies on coupling vibration for vehicle and highway bridge system. Gongcheng Lixue/Eng. Mech. 2008, 25, 230–240. [Google Scholar]
- Zhao, H.; Wei, B.; Guo, P.; Tan, J.; Xiang, P.; Jiang, L.; Fu, W.; Liu, X. Random analysis of train-bridge coupled system under non-uniform ground motion. Adv. Struct. Eng. 2023. [Google Scholar] [CrossRef]
- Gou, H.; Liu, C.; Xie, R.; Bao, Y.; Zhao, L.; Pu, Q. Running safety of high-speed train on deformed railway bridges with interlayer connection failure. Steel Compos. Struct. 2021, 39, 261–274. [Google Scholar] [CrossRef]
- Yu, Z.-w.; Mao, J.-f. Probability analysis of train-track-bridge interactions using a random wheel/rail contact model. Eng. Struct. 2017, 144, 120–138. [Google Scholar] [CrossRef]
- Zeng, Q.; Dimitrakopoulos, E.G. Seismic response analysis of an interacting curved bridge-train system under frequent earthquakes. Earthq. Eng. Struct. Dyn. 2016, 45, 1129–1148. [Google Scholar] [CrossRef]
- Mao, J.; Yu, Z.; Xiao, Y.; Jin, C.; Bai, Y. Random dynamic analysis of a train-bridge coupled system involving random system parameters based on probability density evolution method. Probabilistic Eng. Mech. 2016, 46, 48–61. [Google Scholar] [CrossRef]
- Zeng, Q.; Dimitrakopoulos, E.G. Derailment mechanism of trains running over bridges during strong earthquakes. Procedia Eng. 2017, 199, 2633–2638. [Google Scholar] [CrossRef]
- China, S. Technical Regulations for Dynamic Acceptance for High-Speed Railways Construction; Standards Press of China: Beijing, China, 2013. [Google Scholar]
- Zhao, H.; Wei, B.; Jiang, L.; Xiang, P. Seismic running safety assessment for stochastic vibration of train–bridge coupled system. Arch. Civ. Mech. Eng. 2022, 22, 180. [Google Scholar] [CrossRef]
- Luo, X. Study on methodology for running safety assessment of trains in seismic design of railway structures. Soil Dyn. Earthq. Eng. 2005, 25, 79–91. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vertical | Longitudinal | Lateral | Yaw | Roll | Pitch | |
|---|---|---|---|---|---|---|
| Car body | ||||||
| Front bogie | ||||||
| Rear bogie | ||||||
| First wheel set | - | |||||
| Second wheel set | - | |||||
| Third wheel set | - | |||||
| Fourth wheel-set | - |
| 0.8264 | 0.0206 | 0.438 |
| Parameters | Definitions | Values | Units |
|---|---|---|---|
| Elastic modulus | 3.45 × 1010 | ||
| Mass moment of inertia of cross section | 12.744 | ||
| Poisson’s ratio | 0.2 | / | |
| Mass per unit length | 2.972 × 104 | ||
| Length of element | 3.2 | ||
| Damping ratio | 0.03 | / |
| Working Condition Type | ||||
|---|---|---|---|---|
| Equal-height pier (m) | 8 | 8 | 8 | 8 |
| Gradually increasing (m) | 8 | 10 | 12 | 14 |
| Sharply increasing (m) | 8 | 8 | 14 | 14 |
| Parameters | Site Classification | |||
|---|---|---|---|---|
| I | II | III | IV | |
| 0.728 | 0.775 | 0.822 | 0.868 | |
| 0.411 | 0.557 | 1.140 | 2.208 | |
| 24.763 | 18.656 | 13.491 | 9.848 | |
| 0.453 | 0.355 | 0.154 | 0.082 | |
| (PGA = 0.1 g) | 11.241 | 15.546 | 22.370 | 31.201 |
| (PGA = 0.2 g) | 43.028 | 59.512 | 85.598 | 119.304 |
| (PGA = 0.4 g) | 172.103 | 238.028 | 342.905 | 478.009 |
| Working Condition Type | 1st Modulus | 2nd Modulus | 3rd Modulus | 4th Modulus |
|---|---|---|---|---|
| Equal-height pier | 13.187 | 13.302 | 15.806 | 21.443 |
| Gradually increasing | 10.452 | 10.518 | 12.998 | 15.538 |
| Sharply increasing | 9.630 | 10.832 | 13.964 | 15.595 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, Y.; Jiang, L.; Zhang, Z.; Zhao, H.; Hu, H.; Zhang, P.; Tang, F.; Xiang, P. Influence of Variable Height of Piers on the Dynamic Characteristics of High-Speed Train–Track–Bridge Coupled Systems in Mountainous Areas. Appl. Sci. 2023, 13, 10271. https://doi.org/10.3390/app131810271
Zeng Y, Jiang L, Zhang Z, Zhao H, Hu H, Zhang P, Tang F, Xiang P. Influence of Variable Height of Piers on the Dynamic Characteristics of High-Speed Train–Track–Bridge Coupled Systems in Mountainous Areas. Applied Sciences. 2023; 13(18):10271. https://doi.org/10.3390/app131810271
Chicago/Turabian StyleZeng, Yingying, Lizhong Jiang, Zhixiong Zhang, Han Zhao, Huifang Hu, Peng Zhang, Fang Tang, and Ping Xiang. 2023. "Influence of Variable Height of Piers on the Dynamic Characteristics of High-Speed Train–Track–Bridge Coupled Systems in Mountainous Areas" Applied Sciences 13, no. 18: 10271. https://doi.org/10.3390/app131810271
APA StyleZeng, Y., Jiang, L., Zhang, Z., Zhao, H., Hu, H., Zhang, P., Tang, F., & Xiang, P. (2023). Influence of Variable Height of Piers on the Dynamic Characteristics of High-Speed Train–Track–Bridge Coupled Systems in Mountainous Areas. Applied Sciences, 13(18), 10271. https://doi.org/10.3390/app131810271