
Precise Cadastral Survey of Rural Buildings Based on Wall Segment Topology Analysis from Dense Point Clouds


Abstract
:1. Introduction
- (1)
- The precise and complete fitting of the wall surface remains problematic [5,25]. Because of the limited viewpoints and occlusion, the wall segments are often incomplete, especially in dense built-up areas. Additionally, due to the existence of windows and other building attachments, as well as the interruptions of shadow and vegetation, the wall points by stereo matching may not be strict vertical planes, leading to spurious or incomplete results.
- (2)
- Error-proneness of wall segment topology [26]. The intersection of adjacent walls and the searching of closed wall polygons require a clear description of wall–wall topology. Imperfect wall extraction results will result in incorrect connections, which require further interaction for industrial solutions. Furthermore, the regularization of the boundaries also requires a global description of wall topology.
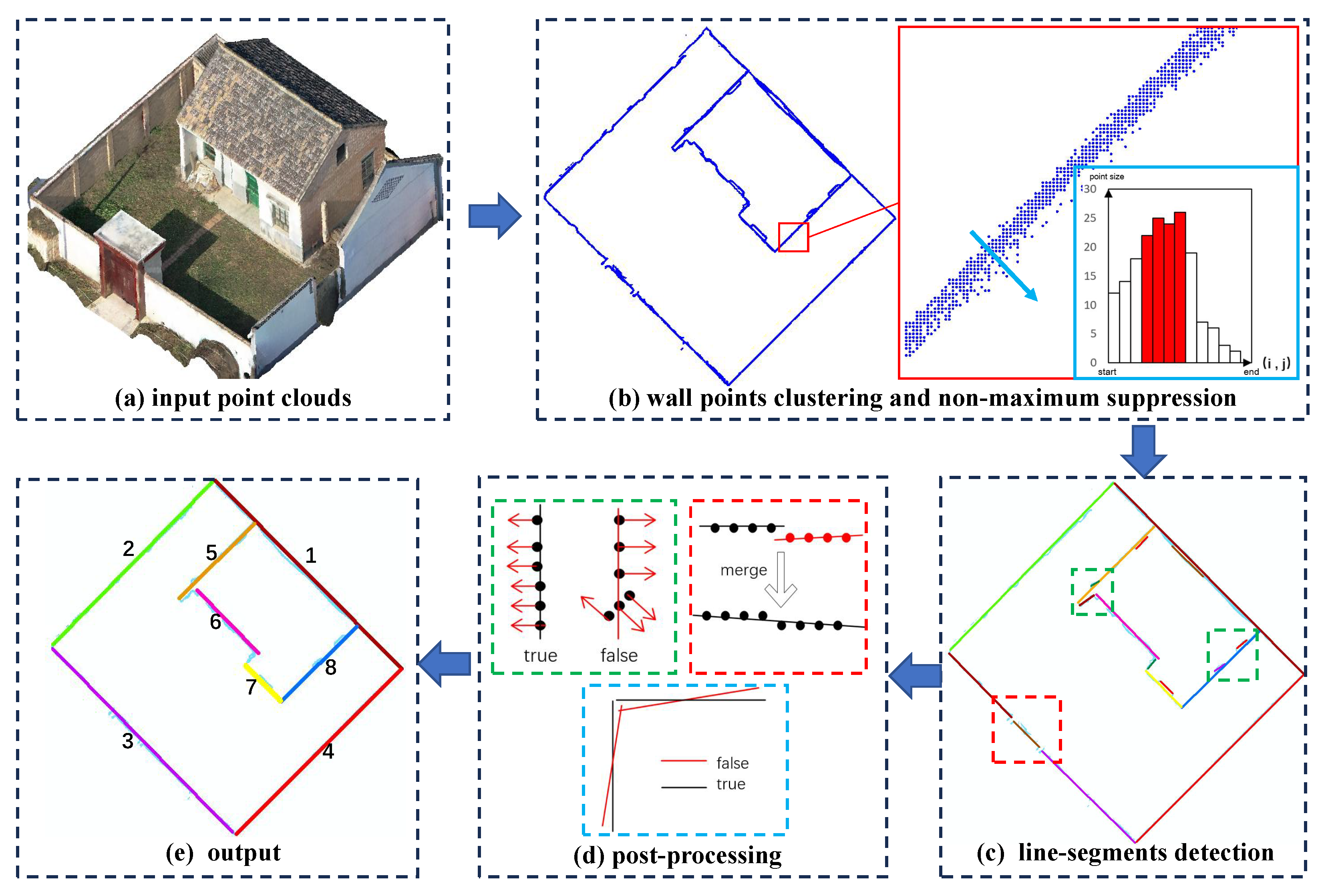
2. Methods
2.1. Detection of Wall Segments
2.1.1. Wall Points Clustering
2.1.2. Non-Maximum Suppression
- (1)
- Rasterization
- (2)
- Non-Maximum Suppression
2.1.3. Multiple Cue Weighted RANSAC
2.1.4. Post-Processing
2.2. Graph-Based Wall Topology Analysis
2.2.1. Line Segment Topology Graph
2.2.2. Graph-Based Wall Connecting and Correction
- (a)
- Spurious edge, where the average point density is below the pre-given threshold . We simply delete the corresponding graph edge.
- (b)
- L type edge, where if two line segments are vertical and both need to be extended to the corner point or the length of exceeding part does not exceed a . The two line segments are directly intersected at the corner.
- (c)
- T type edge, where two line segments are vertical but do not form an L type edge. The bottom edge is extended to the intersected corner, while the top one is decomposed at the corner point and similar operations are adopted on the WLTG.
- (d)
- Z type edge, where two line segments are parallel. We add the missed short vertical edges, and, meanwhile, added one graph vertex and two graph edges to the WLTG.
2.2.3. Graph-Based Closed-Loop Analysis
3. Experiments and Evaluation
3.1. Dataset, Parameters and Metrics
3.2. Overall Results
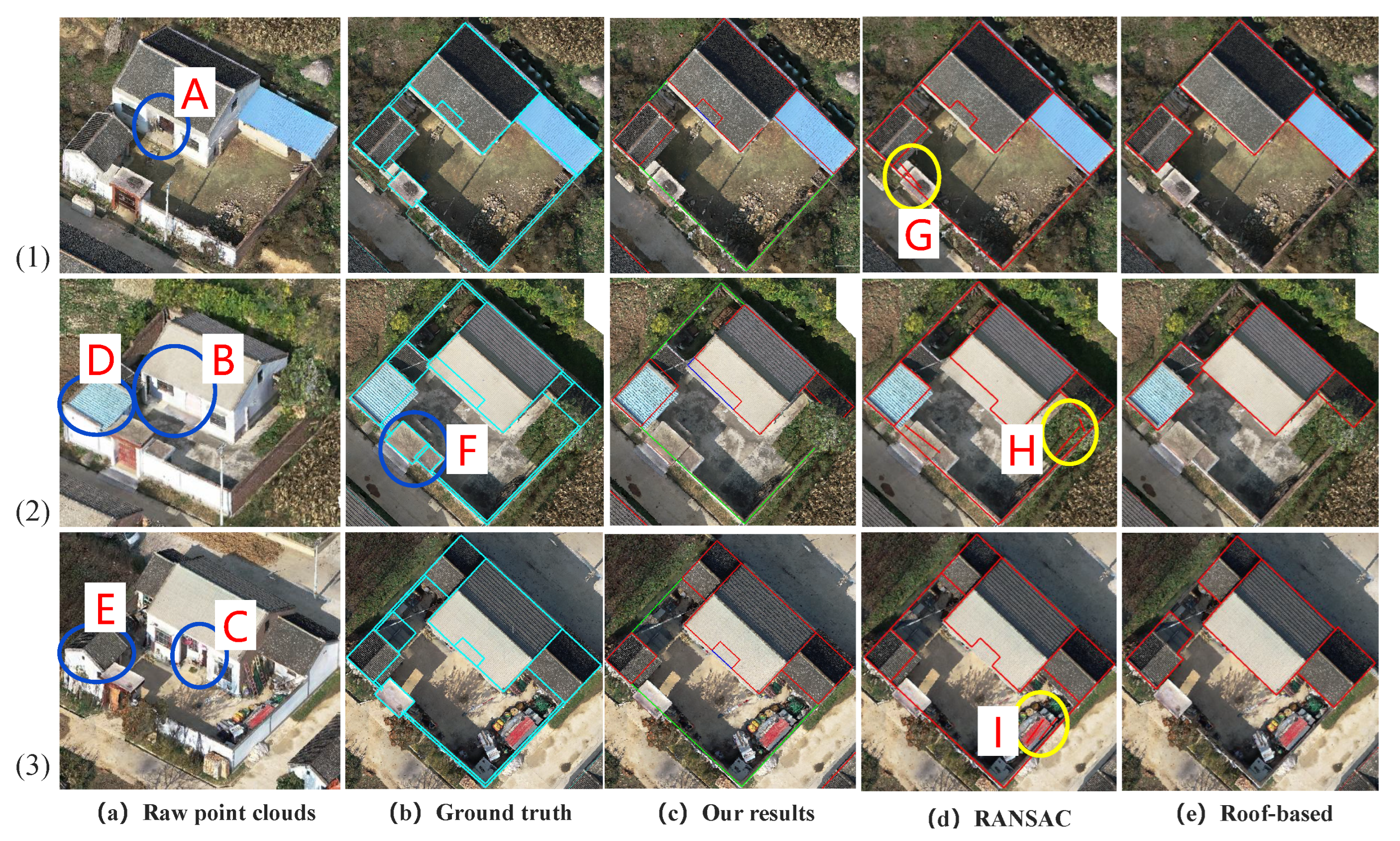
3.3. Compare and Local Details
3.4. Limitation and Discussion
- (1)
- The non-closed walls caused by shared or occluded walls. As shown in location 2 of Figure 8, since our method detects the vector boundaries mainly based on the wall points and building roof from UAV-based point clouds, it will fail when buildings are adjacent or even connected, where no wall points are available. In such situations, the boundaries will be merged, which may require further manual additions in real applications to separate them.
- (2)
- For the gates and ancillary structures of the compound wall, i.e., in location 3 of Figure 8, since only one wall plane passes through the boundaries and polygons are detracted, our methods simply produce linear detection results, and the small polygons and the wall width are not considered. Further operations are still needed to meet the industry requirements of the cadastral survey.
- (3)
- Due to the influence of noise, the occlusion of vegetation, and various other factors, spurious edges may still appear and require further checking. In location 1 of Figure 8, it can be seen that a large amount of debris is usually piled up along the yard walls of rural houses; this may cause occlusion or spurious edges and require further checks in the process of actual production application.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| RANSAC | RANdom SAmple Consensus |
| RTG | Roof Topology Graph |
| WLTG | wall line segment topology Graph |
| DBSCAN | Density-Based Spatial Clustering |
References
- Crommelinck, S.; Bennett, R.; Gerke, M.; Nex, F.; Yang, M.Y.; Vosselman, G. Review of automatic feature extraction from high-resolution optical sensor data for UAV-based cadastral mapping. Remote Sens. 2016, 8, 689. [Google Scholar] [CrossRef]
- Manyoky, M.; Theiler, P.; Steudler, D.; Eisenbeiss, H. Unmanned aerial vehicle in cadastral applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, 38, 57–62. [Google Scholar] [CrossRef]
- Fetai, B.; Oštir, K.; Kosmatin Fras, M.; Lisec, A. Extraction of visible boundaries for cadastral mapping based on UAV imagery. Remote Sens. 2019, 11, 1510. [Google Scholar] [CrossRef]
- Chio, S.H.; Chiang, C.C. Feasibility study using UAV aerial photogrammetry for a boundary verification survey of a digitalized cadastral area in an urban city of Taiwan. Remote Sens. 2020, 12, 1682. [Google Scholar] [CrossRef]
- Crommelinck, S.; Höfle, B.; Koeva, M.; Yang, M.Y.; Vosselman, G. Interactive cadastral boundary delineation from UAV data. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 81–88. [Google Scholar] [CrossRef]
- Karataş, K.; Altınışık, N.S. Assessing the utilization of UAV technology for cadastre update applications in Turkey based on cost-benefit analysis. Surv. Rev. 2023, 1–13. [Google Scholar] [CrossRef]
- Wassie, Y.; Koeva, M.; Bennett, R.; Lemmen, C. A procedure for semi-automated cadastral boundary feature extraction from high-resolution satellite imagery. J. Spat. Sci. 2018, 63, 75–92. [Google Scholar] [CrossRef]
- Xia, X.; Persello, C.; Koeva, M. Deep fully convolutional networks for cadastral boundary detection from UAV images. Remote Sens. 2019, 11, 1725. [Google Scholar] [CrossRef]
- Li, J.; Huang, X.; Tu, L.; Zhang, T.; Wang, L. A review of building detection from very high resolution optical remote sensing images. Gisci. Remote Sens. 2022, 59, 1199–1225. [Google Scholar] [CrossRef]
- Leotta, M.J.; Long, C.; Jacquet, B.; Zins, M.; Lipsa, D.; Shan, J.; Xu, B.; Li, Z.; Zhang, X.; Chang, S.; et al. Urban Semantic 3D Reconstruction From Multiview Satellite Imagery. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Long Beach, CA, USA, 16–17 June 2019; pp. 1451–1460. [Google Scholar]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Pasquali, G.; Iannelli, G.C.; Dell’Acqua, F. Building footprint extraction from multispectral, spaceborne earth observation datasets using a structurally optimized U-Net convolutional neural network. Remote Sens. 2019, 11, 2803. [Google Scholar] [CrossRef]
- Wang, X.; Ma, B.; Qing, Z.; Sang, Y.; Gao, C.; Zhang, S.; Sang, N. Cbr-net: Cascade boundary refinement network for action detection: Submission to activitynet challenge 2020 (task 1). arXiv 2020, arXiv:2006.07526. [Google Scholar]
- Guo, H.; Du, B.; Zhang, L.; Su, X. A coarse-to-fine boundary refinement network for building footprint extraction from remote sensing imagery. Isprs J. Photogramm. Remote Sens. 2022, 183, 240–252. [Google Scholar] [CrossRef]
- Cai, J.; Chen, Y. MHA-Net: Multipath Hybrid Attention Network for building footprint extraction from high-resolution remote sensing imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 5807–5817. [Google Scholar] [CrossRef]
- Ling, H.; Gao, J.; Kar, A.; Chen, W.; Fidler, S. Fast interactive object annotation with curve-gcn. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5257–5266. [Google Scholar]
- Li, Z.; Wegner, J.D.; Lucchi, A. Topological map extraction from overhead images. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1715–1724. [Google Scholar]
- Zorzi, S.; Bazrafkan, S.; Habenschuss, S.; Fraundorfer, F. Polyworld: Polygonal building extraction with graph neural networks in satellite images. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 1848–1857. [Google Scholar]
- Sampath, A.; Shan, J. Building boundary tracing and regularization from airborne LiDAR point clouds. Photogramm. Eng. Remote Sens. 2007, 73, 805–812. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, X.; Zhao, X.; Xin, Q. Extracting building boundaries from high resolution optical images and LiDAR data by integrating the convolutional neural network and the active contour model. Remote Sens. 2018, 10, 1459. [Google Scholar] [CrossRef]
- Yan, Y.; Yao, X.; Qiu, Y. Research on cadastral survey method based on 3D reality model and laser point cloud data. In Proceedings of the International Conference on Precision Instruments and Optical Engineering (PIOE 2022), Guangzhou, China, 23–25 September 2022; Volume 12585, pp. 150–155. [Google Scholar]
- Šafář, V.; Potůčková, M.; Karas, J.; Tlustý, J.; Štefanová, E.; Jančovič, M.; Cígler Žofková, D. The Use of UAV in Cadastral Mapping of the Czech Republic. Isprs Int. J. -Geo-Inf. 2021, 10, 380. [Google Scholar] [CrossRef]
- Xia, S.; Wang, R. Façade separation in ground-based LiDAR point clouds based on edges and windows. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2019, 12, 1041–1052. [Google Scholar] [CrossRef]
- Widyaningrum, E.; Gorte, B.; Lindenbergh, R. Automatic building outline extraction from ALS point clouds by ordered points aided hough transform. Remote Sens. 2019, 11, 1727. [Google Scholar] [CrossRef]
- dos Santos, R.C.; Galo, M.; Habib, A.F. Regularization of building roof boundaries from airborne LiDAR data using an iterative CD-spline. Remote Sens. 2020, 12, 1904. [Google Scholar] [CrossRef]
- Sohn, G.; Huang, X.; Tao, V. Using a Binary Space Partitioning Tree for Reconstruction Polyhedral Building Models from Airbome Lidar Data. Photogramm. Eng. Remote Sens. 2008, 74, 1425–1440. [Google Scholar] [CrossRef]
- Schubert, E.; Sander, J.; Ester, M.; Kriegel, H.P.; Xu, X. DBSCAN revisited, revisited: Why and how you should (still) use DBSCAN. Acm Trans. Database Syst. (Tods) 2017, 42, 1–21. [Google Scholar] [CrossRef]
- Canny, J. A computational approach to edge detection. IEEE Trans. Pattern Anal. Mach. Intell. 1986, PAMI-8, 679–698. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. Acm 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Xu, B.; Jiang, W.; Shan, J.; Zhang, J.; Li, L. Investigation on the Weighted RANSAC Approaches for Building Roof Plane Segmentation from LiDAR Point Clouds. Remote Sens. 2016, 8, 5. [Google Scholar] [CrossRef]
- Torr, P.H.; Zisserman, A. MLESAC: A new robust estimator with application to estimating image geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Elberink, S.O.; Vosselman, G. Building reconstruction by target based graph matching on incomplete laser data: Analysis and limitations. Sensors 2009, 9, 6101–6118. [Google Scholar] [CrossRef]
- Xiong, B.; Elberink, S.O.; Vosselman, G. A graph edit dictionary for correcting errors in roof topology graphs reconstructed from point clouds. Isprs J. Photogramm. Remote Sens. 2014, 93, 227–242. [Google Scholar] [CrossRef]
- Perera, G.S.N.; Maas, H.G. Cycle graph analysis for 3D roof structure modelling: Concepts and performance. Isprs J. Photogramm. Remote Sens. 2014, 93, 213–226. [Google Scholar] [CrossRef]
- You, R.J.; Lin, B.C. Building Feature Extraction from Airborne Lidar Data Based on Tensor Voting Algorithm. Photogramm. Eng. Remote Sens. 2011, 77, 1221–1231. [Google Scholar] [CrossRef]
- Awrangjeb, M.; Fraser, C.S. An Automatic and Threshold-Free Performance Evaluation System for Building Extraction Techniques From Airborne LIDAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4184–4198. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Point Density | Area Size | Ground Truth | ||
|---|---|---|---|---|---|
| Corners | Edges | Polygons | |||
| Xi’An | 400 pts/m | 17,500 m | 371 | 350 | 63 |
| Grid Size | Density | RANSAC | Roof Extraction | ||||
|---|---|---|---|---|---|---|---|
| DEM Hei | Planarity | Perc | |||||
| Para | 0.1 m | 50 | 0.2 m | 10 | 2 m | 0.9 | 80% |
| Area | Corners | Edges | Polygons | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | Coor | Comp | Qua | Coor | Comp | Qua | Coor | Comp | Qua | |
| a | 0.066 | 100.0 | 90.0 | 90.0 | 89.5 | 81.0 | 74.0 | 100 | 100 | 100 |
| b | 0.065 | 90.0 | 85.7 | 78.2 | 90.0 | 85.7 | 78.2 | 100 | 100 | 100 |
| c | 0.085 | 95.0 | 82.6 | 79.2 | 94.7 | 81.8 | 78.2 | 100 | 100 | 100 |
| d | 0.069 | 93.9 | 89.6 | 84.7 | 93.2 | 87.2 | 82.0 | 100 | 88.9 | 88.9 |
| e | 0.093 | 91.7 | 84.0 | 78.1 | 90.4 | 84.4 | 77.5 | 90.0 | 75.0 | 69.2 |
| f | 0.086 | 94.1 | 83.5 | 79.3 | 93.5 | 86.3 | 81.4 | 88.9 | 80.0 | 72.7 |
| average | 0.084 | 93.2 | 84.9 | 79.9 | 92.0 | 85.1 | 79.2 | 92.9 | 82.5 | 77.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Han, Z.; Chen, M. Precise Cadastral Survey of Rural Buildings Based on Wall Segment Topology Analysis from Dense Point Clouds. Appl. Sci. 2023, 13, 10197. https://doi.org/10.3390/app131810197
Xu B, Han Z, Chen M. Precise Cadastral Survey of Rural Buildings Based on Wall Segment Topology Analysis from Dense Point Clouds. Applied Sciences. 2023; 13(18):10197. https://doi.org/10.3390/app131810197
Chicago/Turabian StyleXu, Bo, Zhaochen Han, and Min Chen. 2023. "Precise Cadastral Survey of Rural Buildings Based on Wall Segment Topology Analysis from Dense Point Clouds" Applied Sciences 13, no. 18: 10197. https://doi.org/10.3390/app131810197
APA StyleXu, B., Han, Z., & Chen, M. (2023). Precise Cadastral Survey of Rural Buildings Based on Wall Segment Topology Analysis from Dense Point Clouds. Applied Sciences, 13(18), 10197. https://doi.org/10.3390/app131810197