1. Introduction
Parallel mechanisms offer several advantages over conventional serial mechanisms, making them an attractive alternative. These mechanisms exhibit high loading capacity, excellent dynamic response, and precise positioning capabilities, which contribute to their appeal [
1]. The Gough-Stewart platform, a parallel mechanism developed by Gough for flight simulators, has garnered significant attention [
2,
3]. The Gough–Stewart platform is widely used in different fields. Liu and Wiersma have designed a supporter for patients’ heads based on the Gough–Stewart platform [
4]. Galvan-Pozos et al., developed an energy harvester from waves using the Gough–Stewart platform [
5]. There are other design concepts, such as floating marine platforms [
6], the position-control mechanism of the secondary mirror in radio telescopes [
7], and material handling and characterization machines [
8]. The kinematics and statics of the Gough–Stewart platform have become crucial areas of research due to its application potential. Consequently, understanding the kinematics and statics of the Gough–Stewart platform becomes imperative for effectively harnessing its potential in various applications.
The position and posture of each joint in the time domain are the basis of inverse kinetostatics for parallel mechanisms. Traditional kinematics for a mechanism needs the appropriate mathematical system to express the translational motion and rotational motion in a complex way [
9,
10,
11]. However, there are sometimes many finite solutions corresponding to different configurations [
12]. Up until now, the kinematics of the manipulator could be analyzed with the methods proposed in the past decades [
13,
14]. Some scholars also provide several methods to solve the kinematics of parallel mechanisms [
15,
16].
Statics is essential in the analysis of parallel mechanisms. It provides a fundamental understanding of the equilibrium conditions and force distribution within these mechanisms. Through studying the static performance of parallel mechanisms, the forces, moments, and equilibrium states that govern their operation can be investigated. A systematic study of statics offers the groundwork for the subsequent study of their dynamic behavior and validates the potential in various engineering applications. The general law of the balance of the spatial force system is established based on the virtual displacement principle. The main research methods include the virtual displacement principle [
17,
18] and the method of influence coefficient [
19]. The statics of over-constrained and parallel mechanisms could be solved based on compliant mechanisms [
20,
21,
22]. Screw theory is a convenient method to solve the kinematics and statics of parallel mechanisms. The expressions for the kinematics and statics could be simplified using screw theory, and some scholars have applied screw theory to solve the kinematics [
23,
24] and statics [
25,
26] in parallel mechanisms. Traditional static modeling methods, which are established in the Cartesian coordinate system, suffer from an unclear mechanism relationship using the dismantling method, and the vector method will introduce multiple variables, while the conventional methods start with displacement, and then solve the velocities and accelerations through first- and second-order numerical interpolation, respectively, which leads to high computational costs.
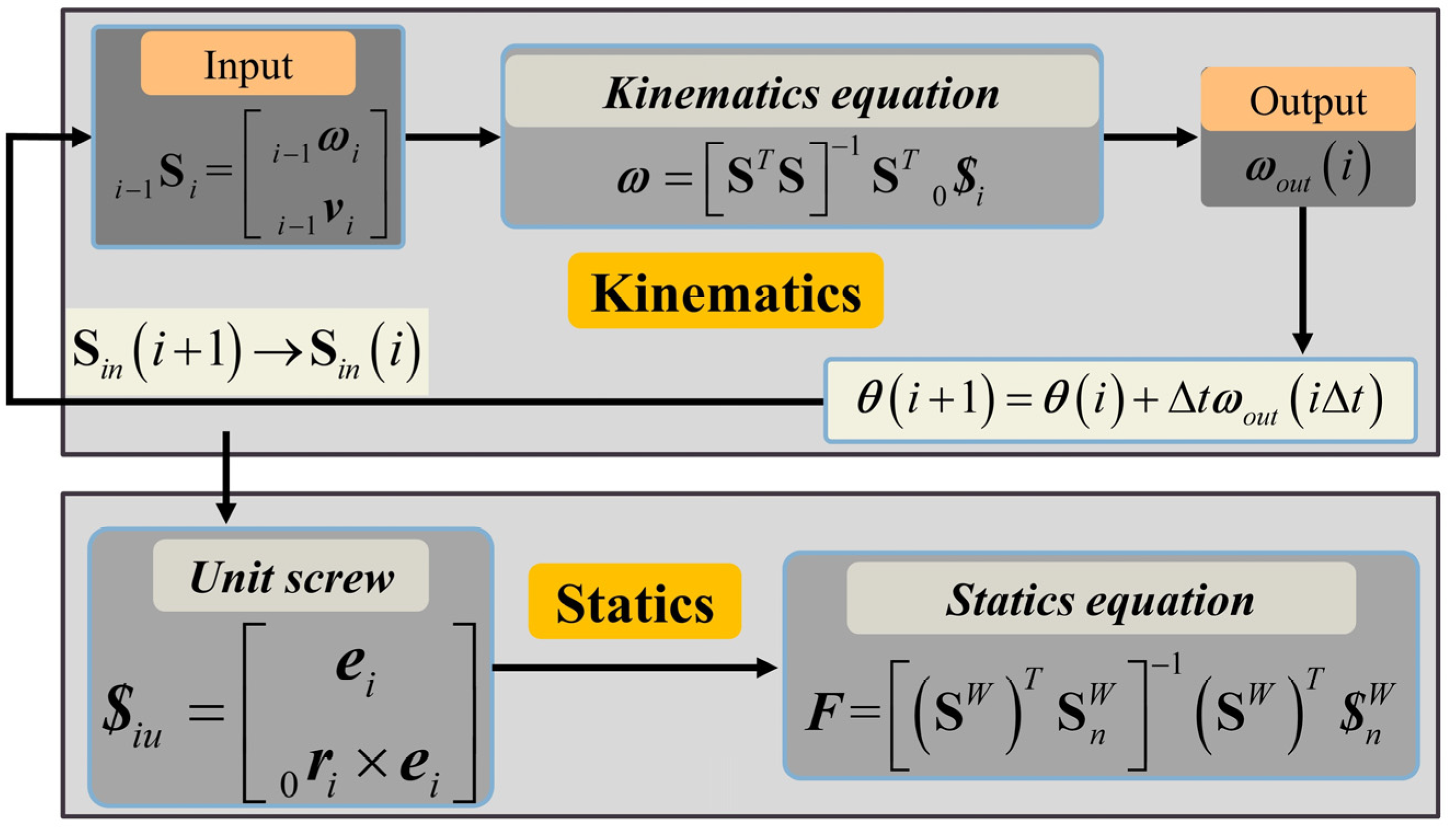
This paper proposes a kinematics and statics analysis method to analyze a Gough–Stewart platform in screw coordinates. Through defining the velocity screw, the relative angular and linear velocities of a point in a single rigid body can be combined into a dual vector with six components. The velocities of all joints can be derived in one direct step through the velocity screw equation. Then, the displacements and accelerations can be carried out separately through a first-order numerical integration and a first-order numerical differential interpolation, individually and simultaneously. Therefore, compared with the conventional modeling methods using displacements as global variables, the second-order numerical interpolation can be avoided in the proposed method in this paper, which eliminates complex algebraic manipulation and leads to more stable and accurate results. The velocity screw equation could be established to calculate the absolute position and absolute posture of all the joints and any point in a single rigid body. Through defining the force screw, both constraint forces and constraint torque at all joints could be expressed in screw form. Both forces and torques are considered in the equilibrium of a rigid body, and the force screw equation is established to express the resultant action of a force system in an absolute coordinate system. The unit screw matrix obtained in kinematic analysis can be directly applied in static analysis, which results in a compacter program structure. Then, the force screw equation using the unit screw matrix allows for a direct calculation of all constraint forces and torques at each joint.
The main contributions of this paper are summarized as follows:
- (1)
Kinematics and statics modeling are unified via expressing parameters in screw coordinates. The kinematic parameters in screw form can be directly used in static equilibrium equations established using force screws.
- (2)
Through combining kinematics and statics analysis, the forces and moments acting on each element of a mechanism in different configurations can be computed systematically.
- (3)
The method proposed in this paper is highly universal and can be applied to the kinematics and statics analysis of variable mechanisms, and the validity of the method is verified via the kinematics and statics analysis of the Gough–Stewart platform.
Compared with the conventional static analysis method, using the velocity screw and the force screw might eliminate complex algebraic manipulation and allow for the direct calculation of the six constraint variables for all joints. This method can also be applied to other planar and spatial complex mechanisms and manipulators.
In this paper, the contents are arranged as follows:
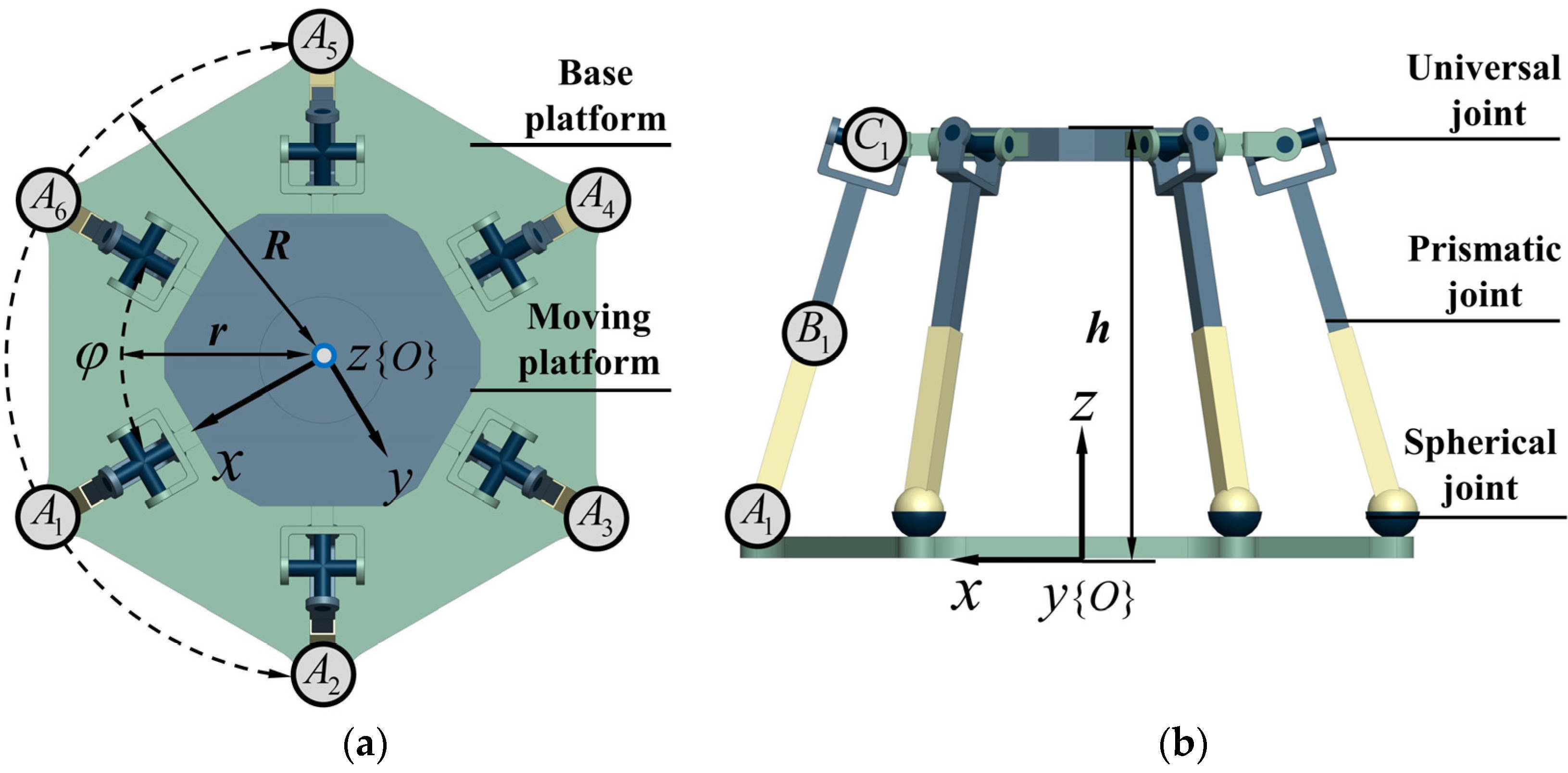
Section 2 introduces the geometry of the Gough–Stewart parallel mechanism.
Section 3 describes the kinematic modeling method in screw form for multi-rigid-body systems and the kinematic modeling of the Gough–Stewart platform.
Section 4 introduces the static modeling method using force screws and the unified kinematic and static modeling approach. The method is demonstrated through static modeling of the Gough–Stewart platform. In
Section 5, the motion of the moving platform and the external loads are given, and the numerical simulation to perform the effectiveness of the modeling method is carried out. And finally,
Section 6 concludes the paper.
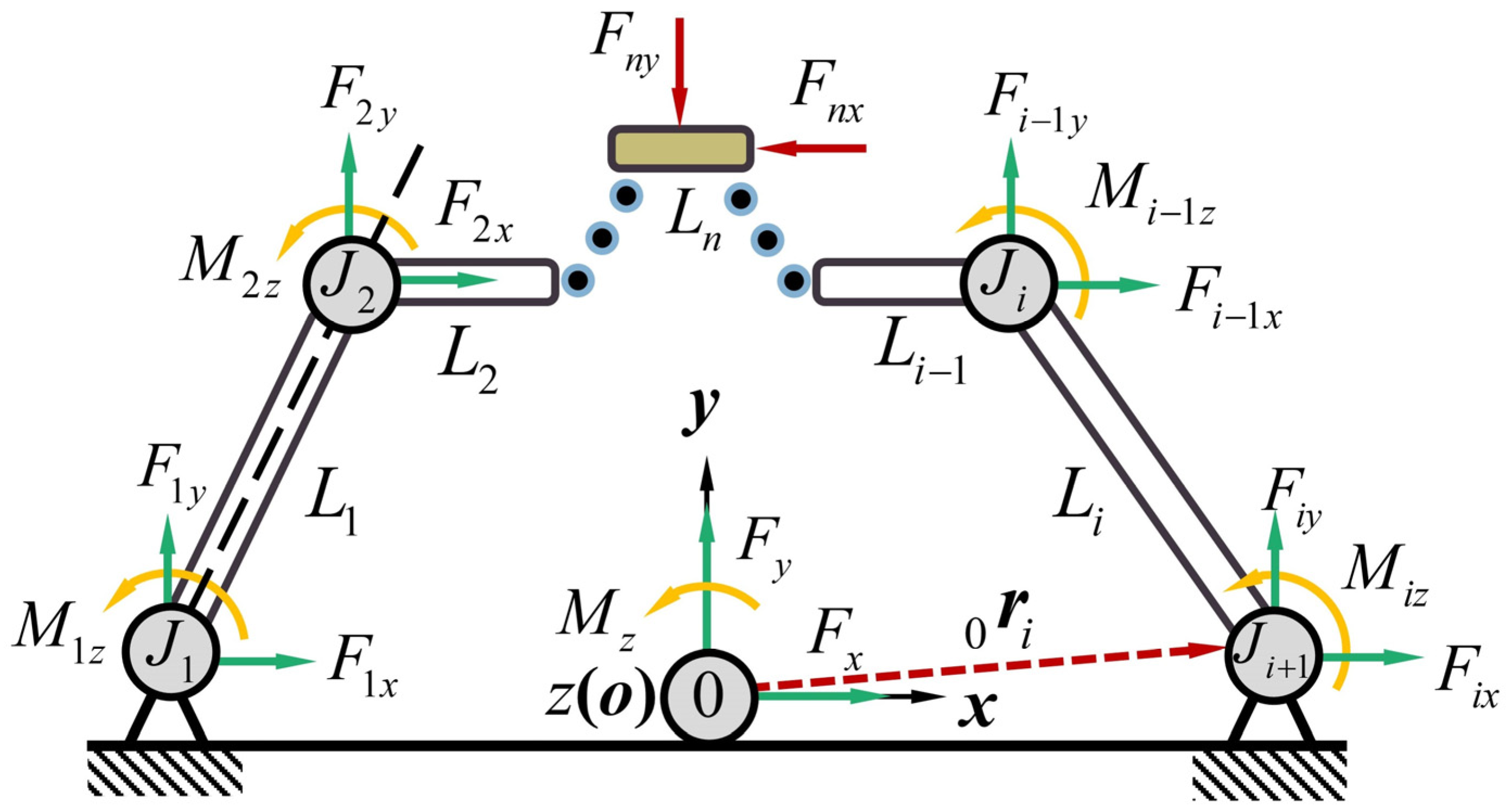
3. Kinematics of a Multi-Rigid System
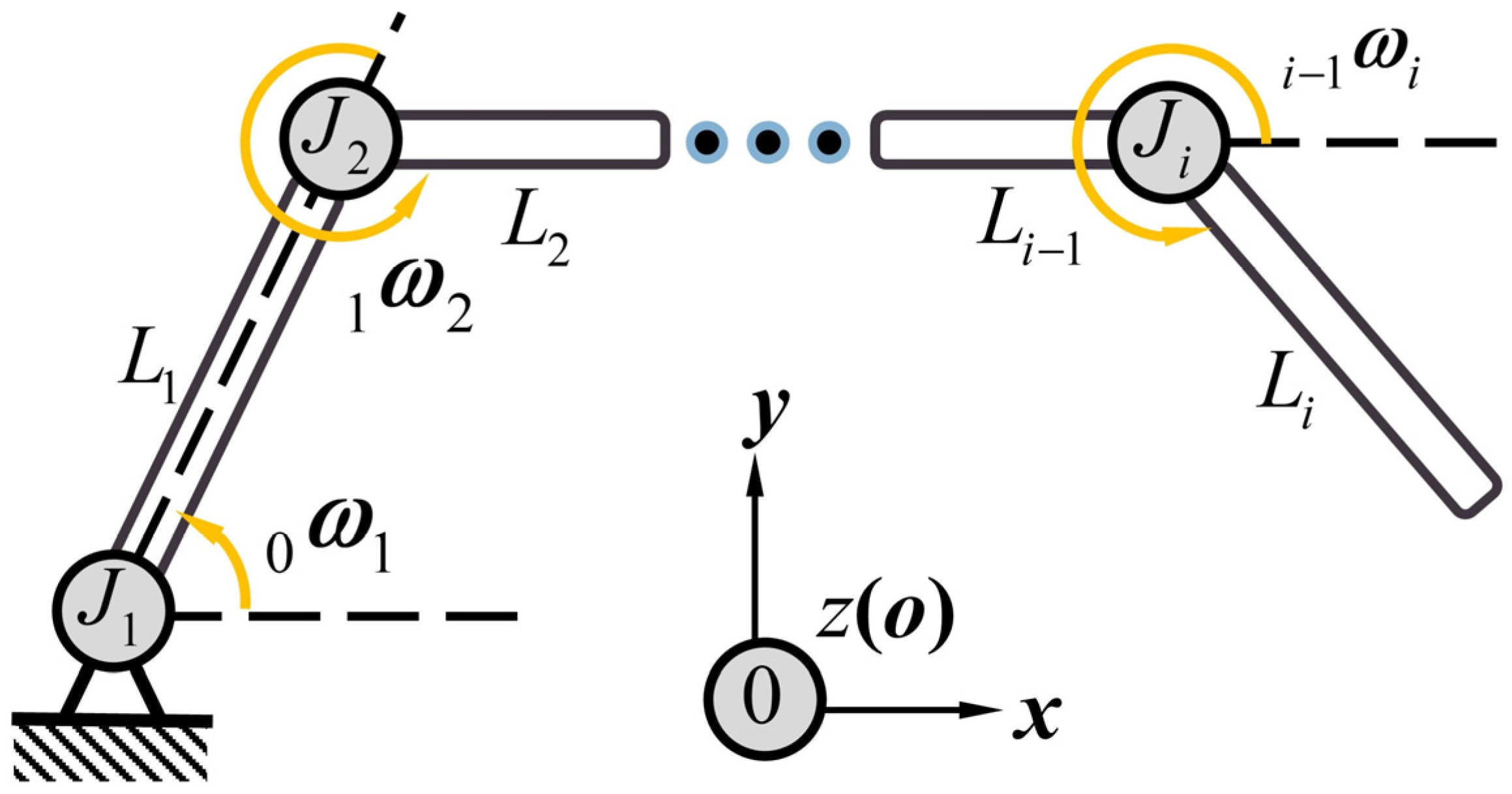
As shown in
Figure 2, suppose there are two single rigid linkages
and
, which are connected by joint
in an open kinematic chain.
The motion of a linkage can be described and determined according to the relative angular velocity and relative linear velocity. The relative angular velocity
and relative linear velocity
of link
are two three-dimensional vectors, and both of them could be defined as a dual vector to form the velocity screw [
27]:
where
is relative angular velocity from joint
to the absolute coordinate 0, and
is the relative linear velocity from joint
to the coordinate origin 0.
The three-dimensional vector in Equation (1) can be expressed as , where is the position vector of joint with respect to the origin of the absolute coordinate system.
Suppose
. Equation (1) can be rewritten as:
where
is the unit direction vector of joint
, and
is the amplitude of the relative angular velocity of joint
. Let
where
is the unit velocity screw of joint
[
28].
Substituting Equation (3) into Equation (2) yields:
Within the unit velocity screw, the first three-dimensional vector presents the posture of the rotational motion, and the last three-dimensional vector contains the position parameters of the rotational motion.
3.1. Kinematics of an Open Kinematic Chain
For an open serial kinematic chain, based on the linear combination, the angular velocity and linear velocity of the terminal joint
can be expressed as follows:
where
is the absolute angular velocity of the end joint
with respect to the absolute coordinate system, and
is the absolute linear velocity of the end joint
with respect to the absolute coordinate frame.
With the definition of velocity screw in Equations (4) and (5), the forward kinematics of an open kinematics chain would be obtained such that
where
which presents the unit screw matrix of the serial linkage and
with
representing the angular velocity vector, which contains all the velocity information of all joints in the kinematic chain.
With Equation (6), if the kinematics of the end link
is given, the inverse kinematics of the open kinematic chain could be derived through:
When
, the kinematic chain is a redundantly actuated mechanism, or it is in a singular configuration. Otherwise, the inverse kinematics of an open serial chain can be solved from Equation (9):
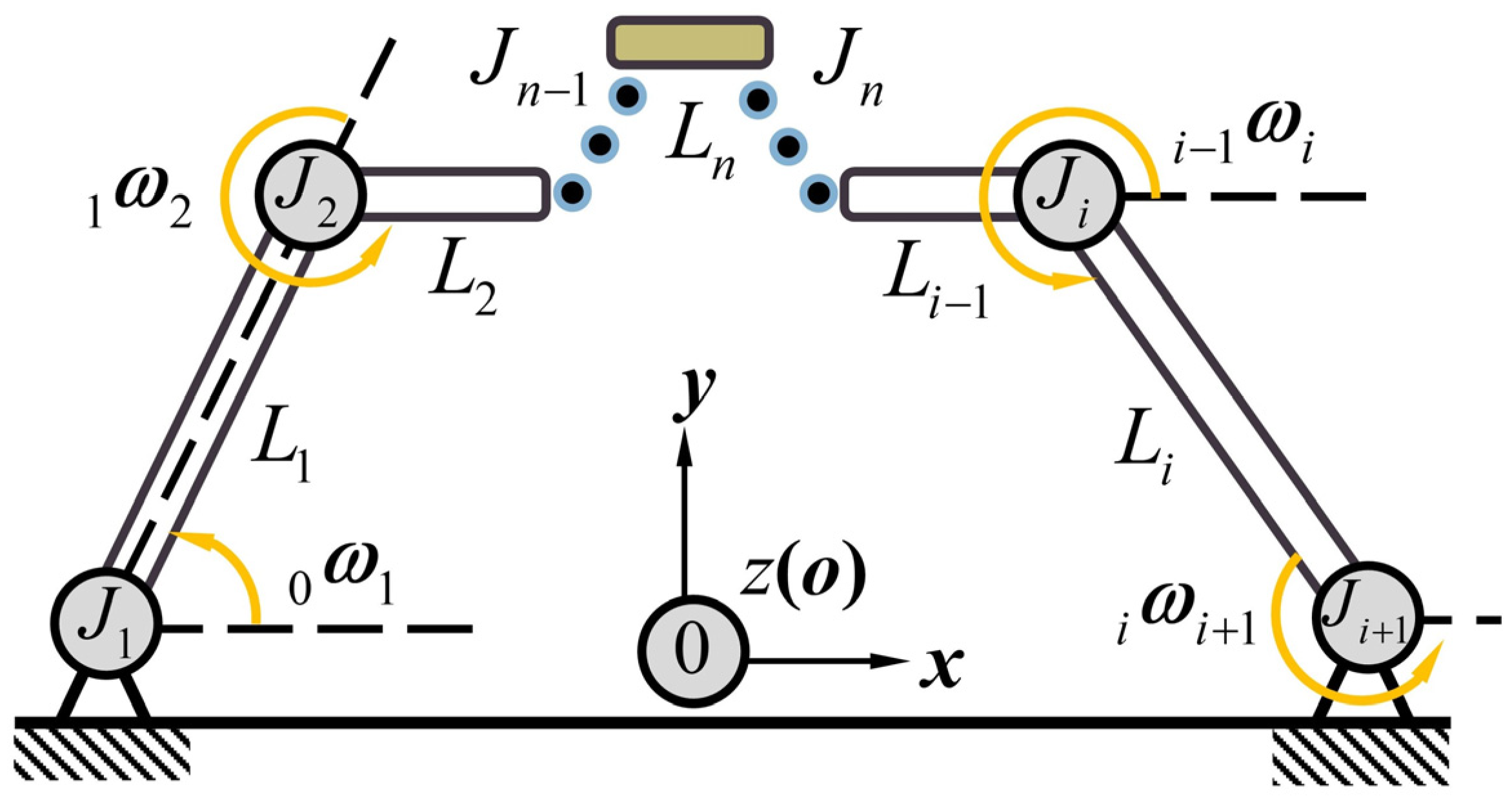
3.2. Kinematics of a Closed Kinematic Chain
A single closed kinematic chain is illustrated in
Figure 3. Based on the linear combination, the kinematics of the end joint
can be expressed as:
The absolute angular velocity and absolute linear velocity of joint
on the expanded rigid body of link
that is superimposed with the origin of the coordinate system are 0. Therefore, Equation (11) can be rewritten as:
With Equations (6) and (12), the forward kinematics of a single closed kinematic chain can be derived as:
When the kinematics of any link
in the closed serial kinematic chain shown in
Figure 3 are given in the absolute coordinate system, that is to say, the screw matrix
of link
is known, the inverse kinematics of the single closed kinematic chain could be solved based on Equation (6):
where only
is known.
When the kinematics of all joint except the link
are prescribed, the forward kinematics of the single closed kinematic chain could be obtained based on Equation (6) through
where
is the relative velocity screw, and
is the absolute velocity screw.
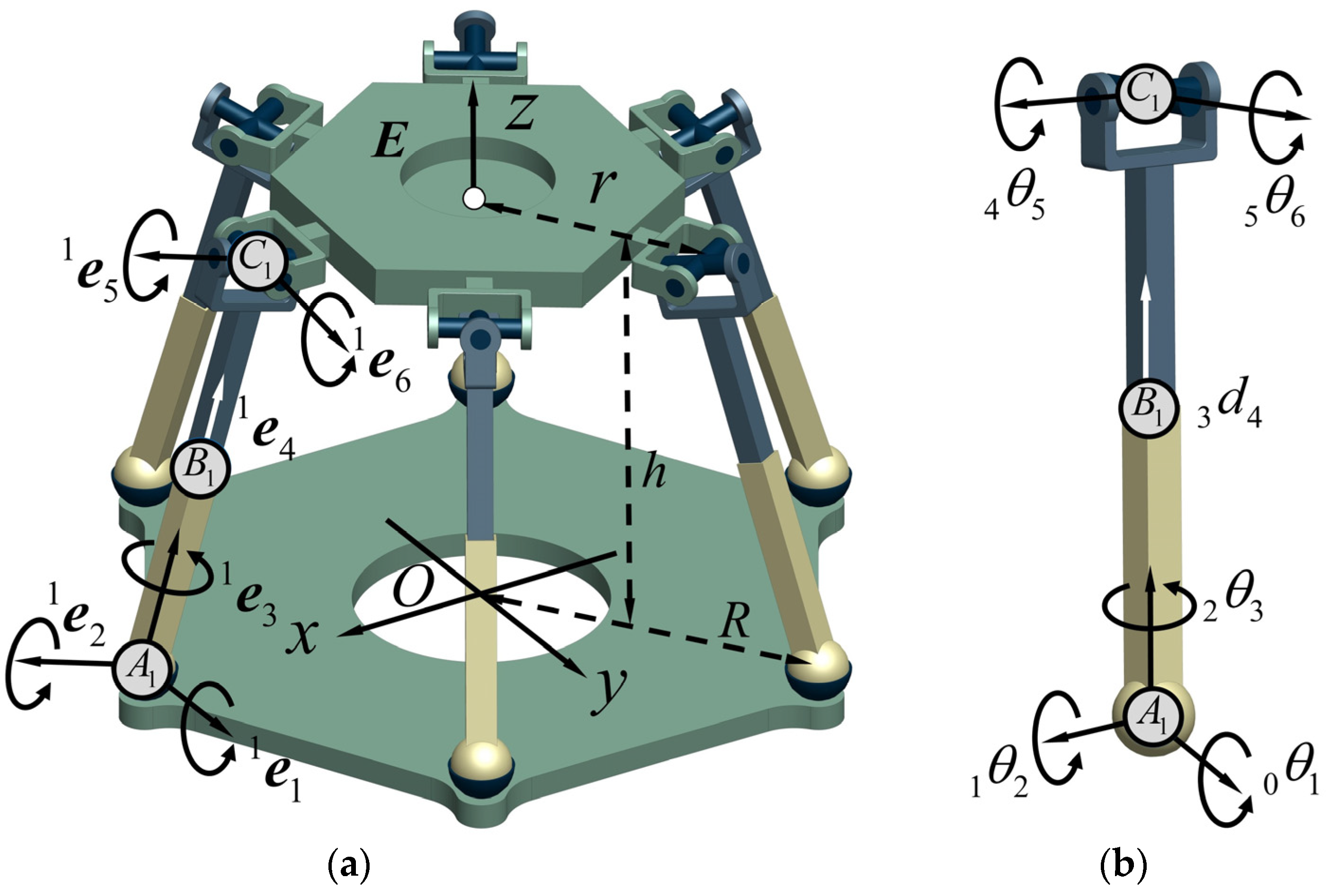
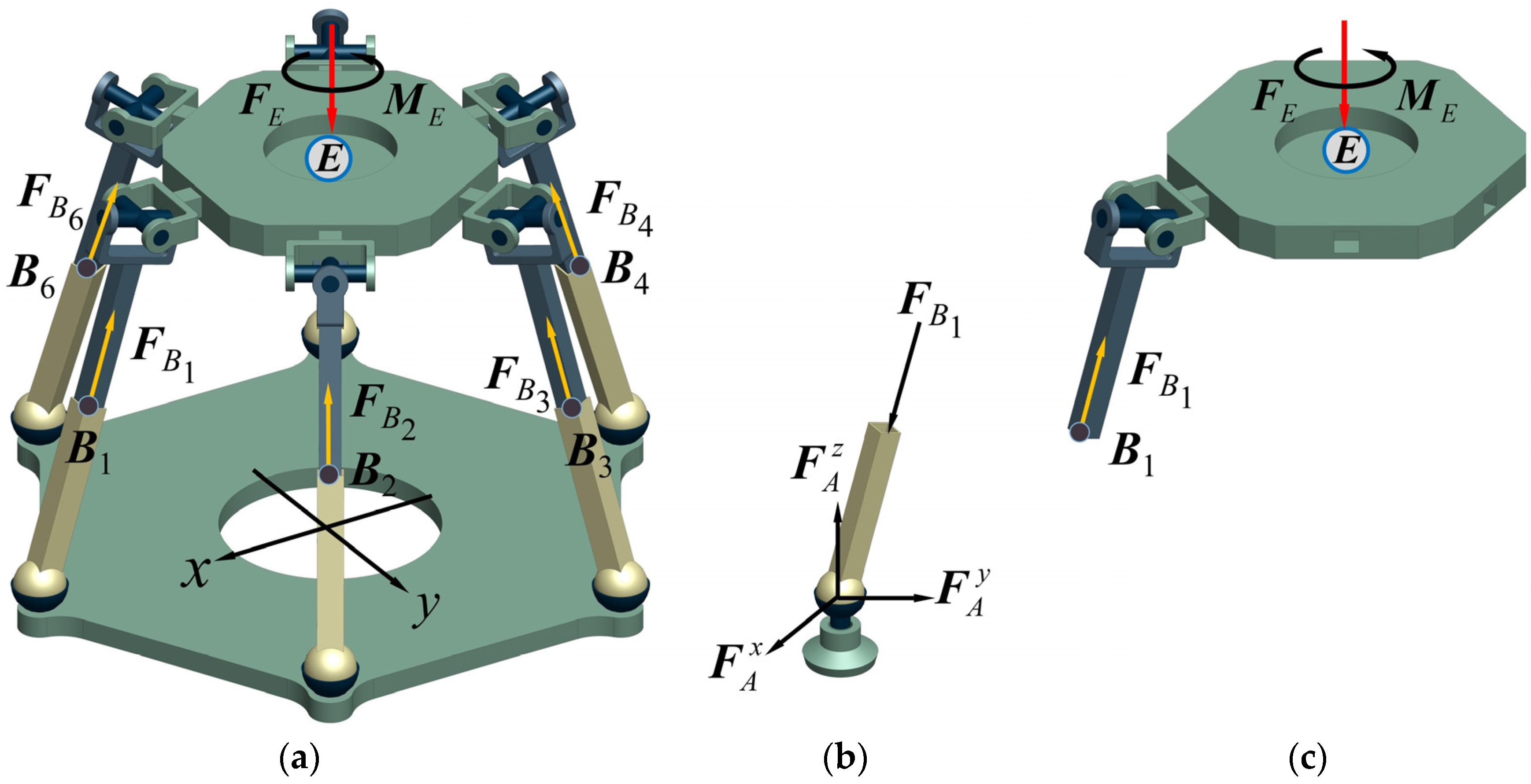
3.3. Kinematics of Gough–Stewart Platform
In this section, the inverse kinematics of the Gough–Stewart platform are computed. As depicted in
Figure 4, the inverse kinematic equation of the Gough–Stewart platform can be established as:
where
represents the
-th subchain of the Gough–Stewart platform.
For the first kinematic chain
, the unit velocity screw equation of the moving platform can be expressed as:
where
is the unit screw matrix of the first kinematic subchain, with velocity screws
,
,
,
,
,
, and
.
Equation (17) is the velocity screw equation of the kinematic chain
which can be applied to solve the relative angular velocities and relative linear velocities. Therefore, Equation (17) could be rewritten as:
In order to obtain the unit screws in Equation (18), the rotation transformation matrix is applied to express
of each joint in the local coordinate system;
represents the
-th chain and
represents the
-th joint in this chain.
where
is the rotation transformation matrix around the
-axis, and it can be expressed as
.
is the rotation transformation matrix from link
to link
; when it rotates around the
-axis,
; when it rotates around
-axis,
; and when it rotates around
-axis,
.
Suppose the velocity screw of the moving platform is given; the relative angular velocity of each kinematic chain
could be calculated using Equation (17).
where
,
is the absolute angular velocity of the moving platform and
is the absolute linear velocity of the moving platform with respect to the absolute coordinate frame.
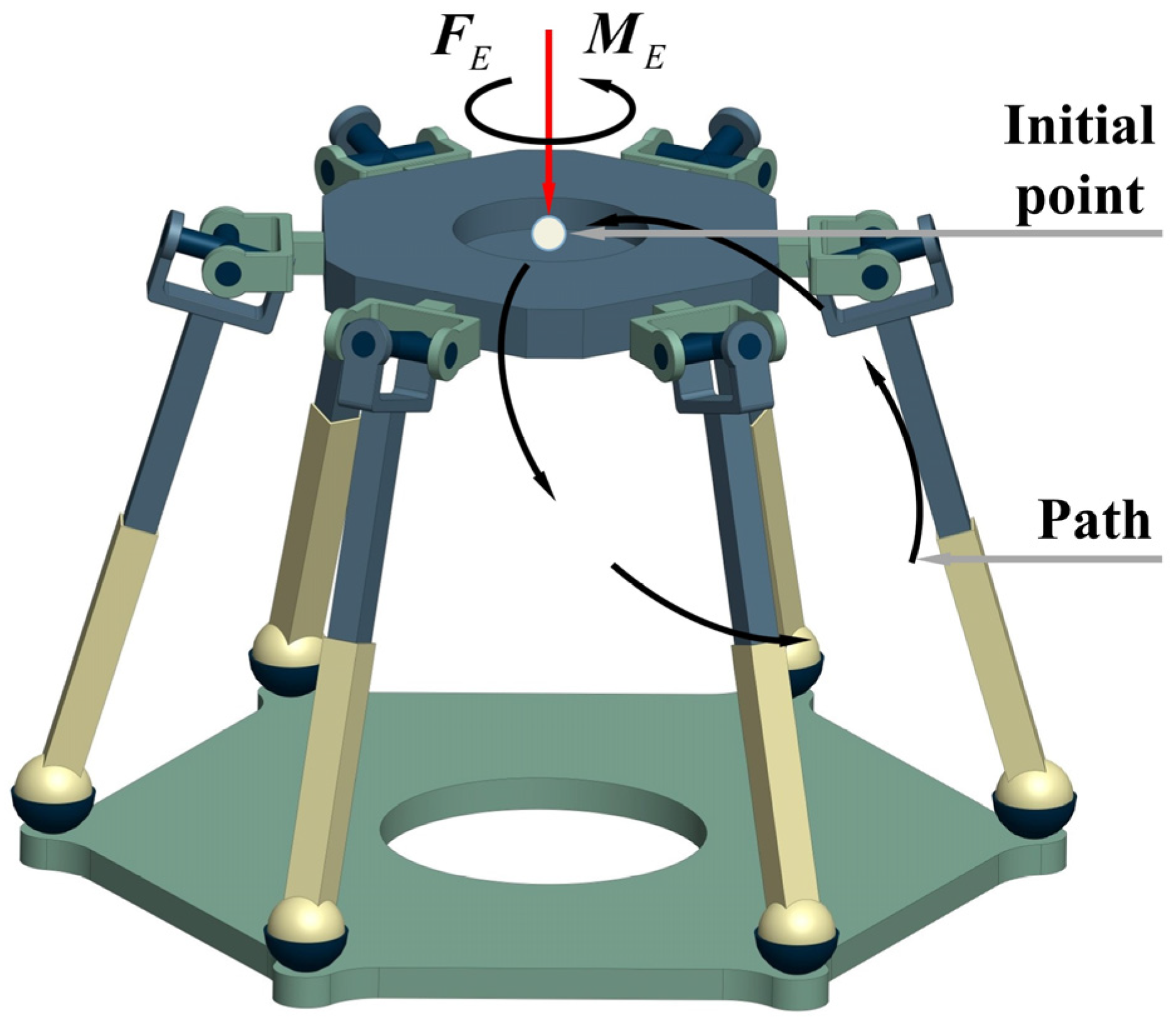
5. Numerical Experiment and Discussion
In order to verify the static modeling method of the Stewart platform, a trajectory of the moving platform is prescribed for the inverse kinematics, which is shown in
Figure 8. The Gough–Stewart platform has six DoFs consisting of three translational motions and three rotational motions. Given a translational path of a circular trajectory for the moving platform, the parametric equations of the trajectory in the absolute coordinate system are expressed as:
where
,
, and
are the three motion variables of the center point on the moving platform at time
. From Equation (32), the unit velocity screw of the moving platform can be written as
, and the discrete conditions are shown in
Table 1. The kinematics analysis of the Gough–Stewart platform is performed through programming the introduced algorithm in MATLAB 2018a. These programs are executed on Windows 11 computers equipped with AMD Ryzen 7 6800HS with Radeon Graphics 3.20 GHz.
The displacement parameters of each joint are obtained through the numerical calculation method. Therefore, using the numerical calculation method introduces differences between the real solution of a practical problem and the approximate solution obtained via numerical calculation. In the iteration simulation, the errors could be minimized through optimizing the step length of the discrete conditions. There are no big differences between the results when the interval of iteration is smaller than 0.001, and it only brings high computation costs.
With the initial conditions of displacement
illustrated in
Table 2, the initial relative angular velocities
of the
i-th kinematic chain could be derived using Equation (20).
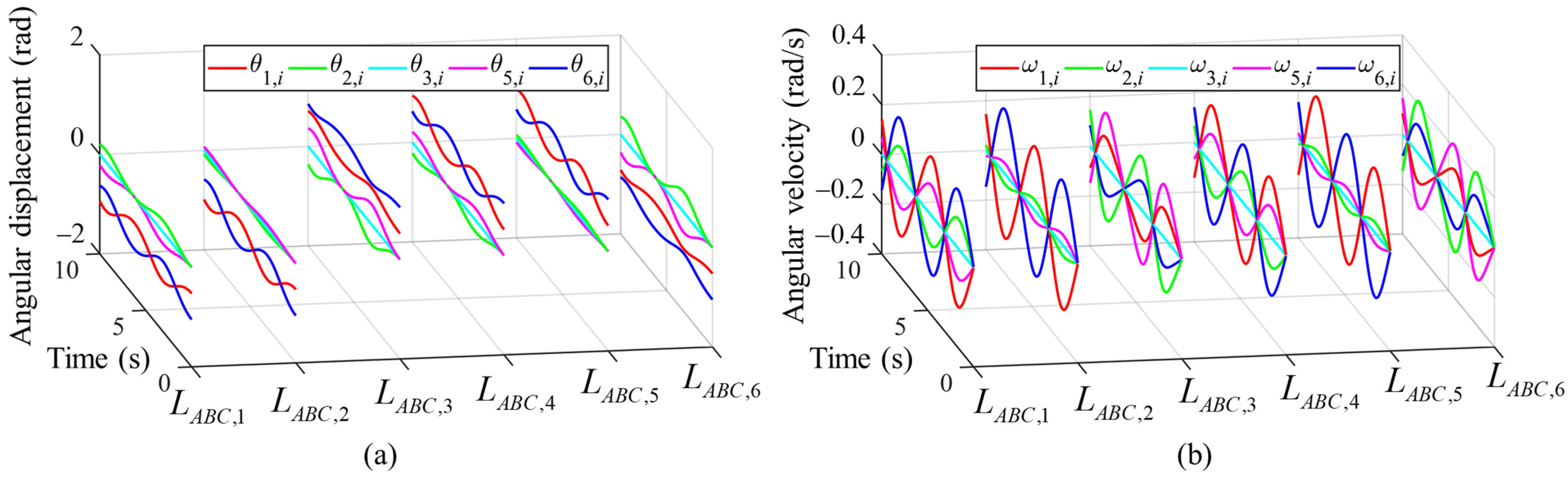
Figure 9 shows the angular displacements (
Figure 9a) and angular velocities (
Figure 9b) of each revolute joint in six kinematic chains.
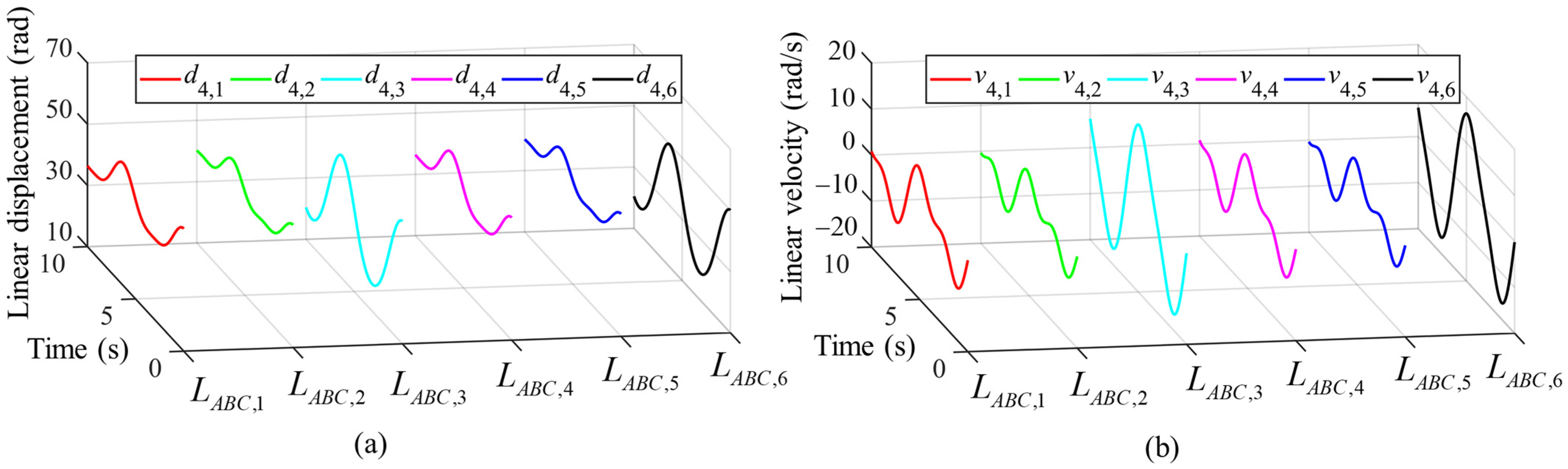
Figure 10 depicts the linear displacement (
Figure 10a) and linear velocity (
Figure 10b) of the linear pairs of each kinematic chain. All diagrams are plotted in MATLAB 2018a.
According to the inverse kinematics that are calculated in the above section, the kinematics of each joint in the absolute coordinate system could be calculated. Suppose there are an external force
and a torque
exerted on the moving platform, which are shown in
Figure 7 and
Figure 8. And the force screw of the moving platform can be expressed in screw coordinates:
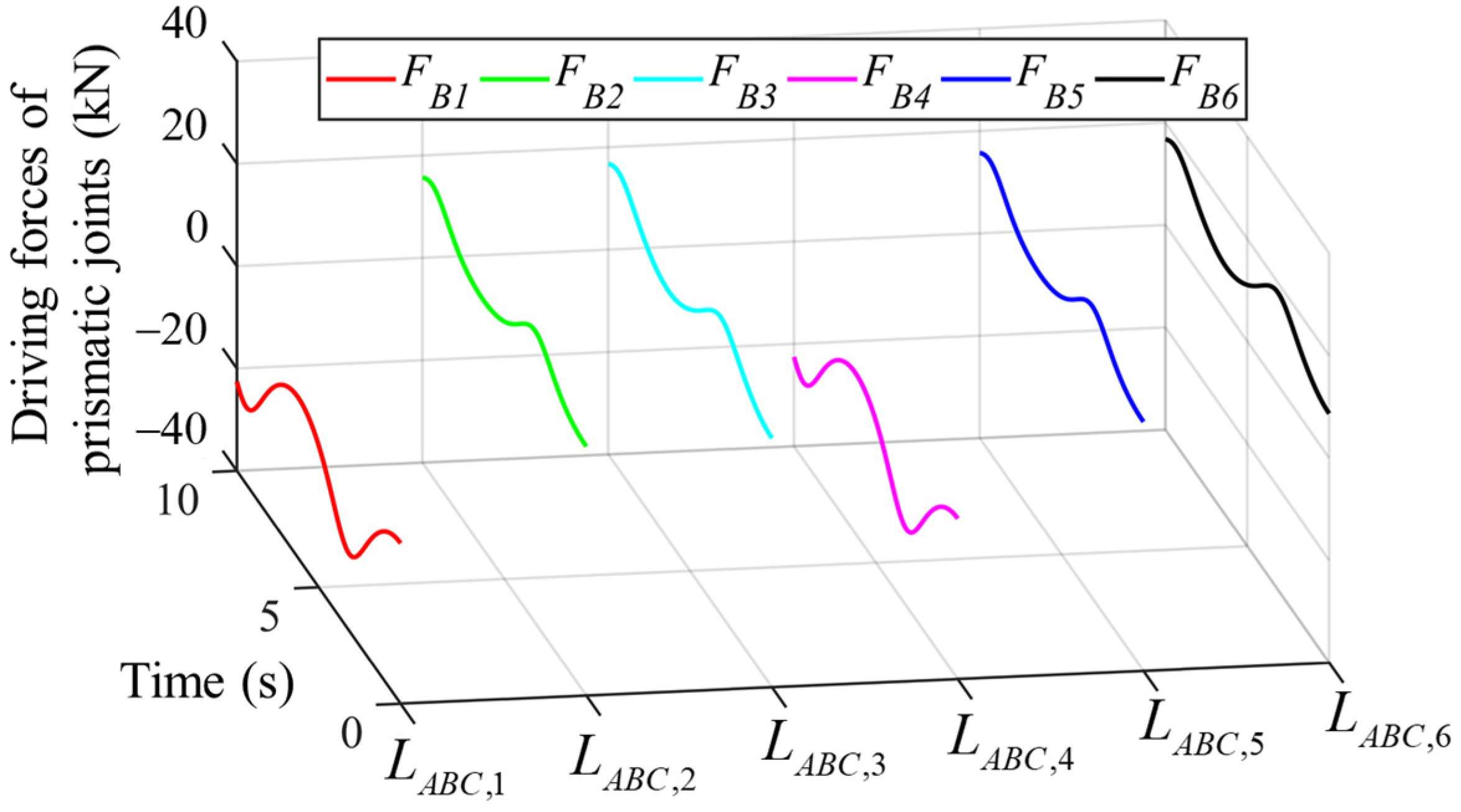
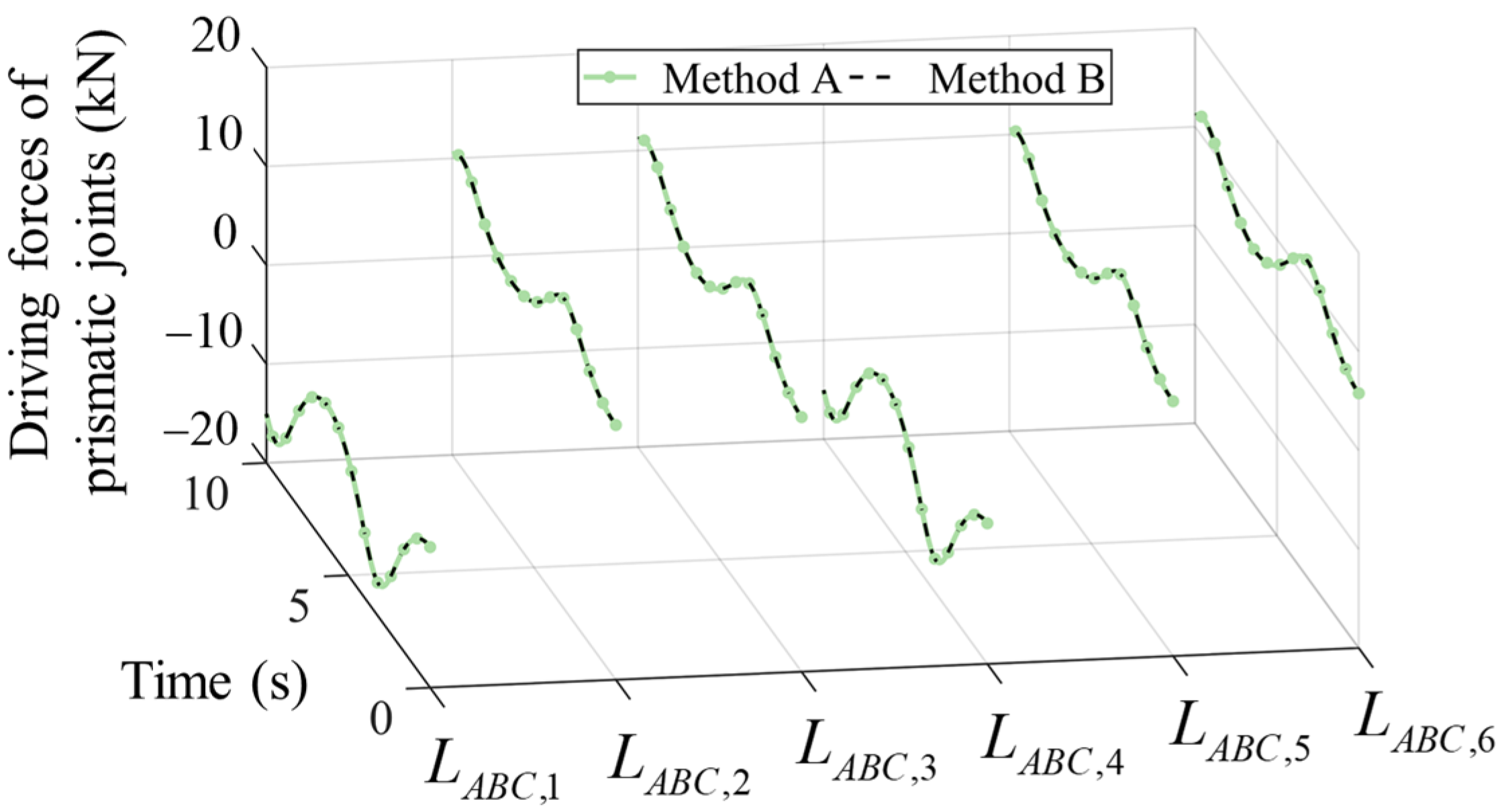
In this paper, the mass and inertia properties of the Gough–Stewart platform are ignored. Based on the structure parameters and the external forces and torques added to the moving platform, the driving forces
to hold the equilibrium of the mechanism could be calculated through carrying out the proposed statics analysis, and the results are plotted in
Figure 11. It is clear that the driving forces are adjusted to maintain equilibrium during the motion process. The simulation results in
Figure 9,
Figure 10 and
Figure 11 show that no sudden changes in velocities or driving forces appeared and that the mechanism was never in singularity.
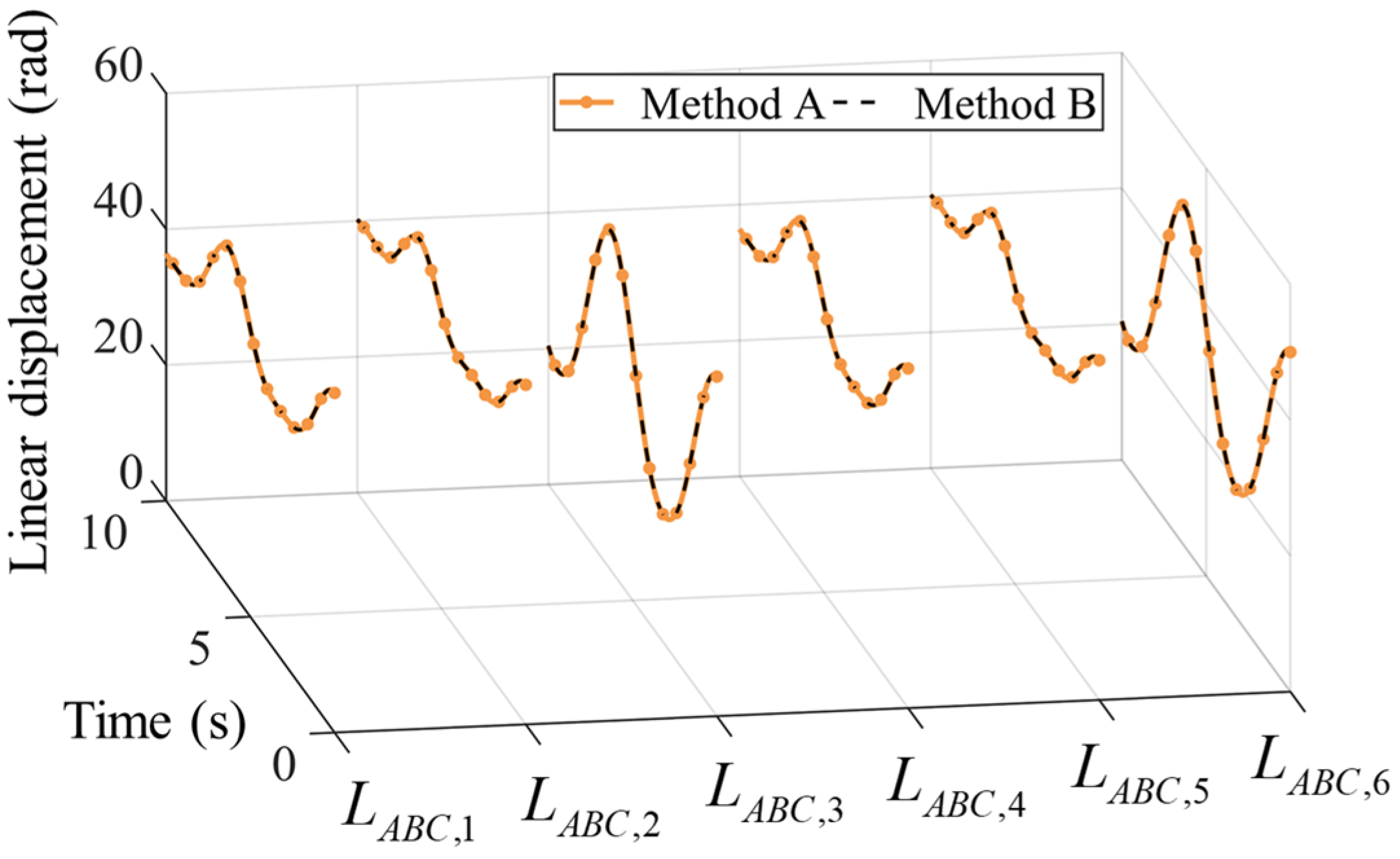
To further verify the correctness of the results simulated using the proposed modeling method here, another numerical analysis based on the method introduced by Gallardo-Alvarado is also performed [
29]. Method A represents the method using the unified modeling method proposed in this paper, and Method B is the method introduced by Gallardo-Alvarado. From
Figure 12 and
Figure 13, the results of both methods are consistent, which validates both methods.
Besides demonstrating a simple circular trajectory, a more complex motion of the geometric center of the moving platform is given to show the performance of the method in analyzing the characteristics of a real mechanism. Some terms are added to simulate chaotic motion, and the velocity screw of the moving platform can be expressed as
The same external loads acting on the geometric center of the moving platform are applied. The kinematics and statics analysis results are plotted in
Figure 14,
Figure 15 and
Figure 16.
Figure 14 gives the angular displacements (
Figure 14a) and angular velocities (
Figure 14b) of each revolute joint in six kinematic chains within the whole motion period. Because of the additional terms in the motion, the displacement and velocities are no longer periodic.
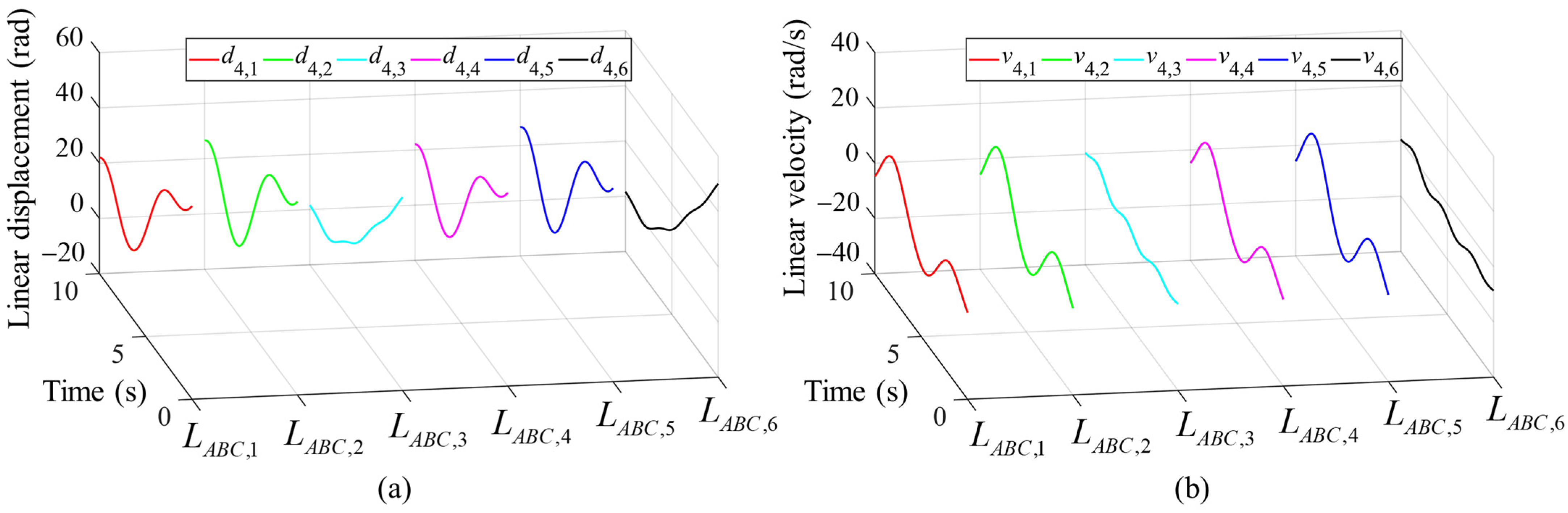
Figure 15 describes the linear displacements (
Figure 15a) and linear velocities (
Figure 15b) of the linear pairs within each kinematic chain.
Through the same static analysis approach, the driving forces
to maintain the posture of the mechanism and keep the equilibrium within the complex motion period are analyzed. In
Figure 16, the driving forces are in a reasonable arrangement and are adjusted during the motion. There are no sudden changes in either kinematic or static parameters, and the results show the working characteristics of the mechanism under complex motion requirements and external loads.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}