
Design, Analysis, and Experiment of a Wheel-Legged Mobile Robot
Abstract
:1. Introduction
2. Structure Design
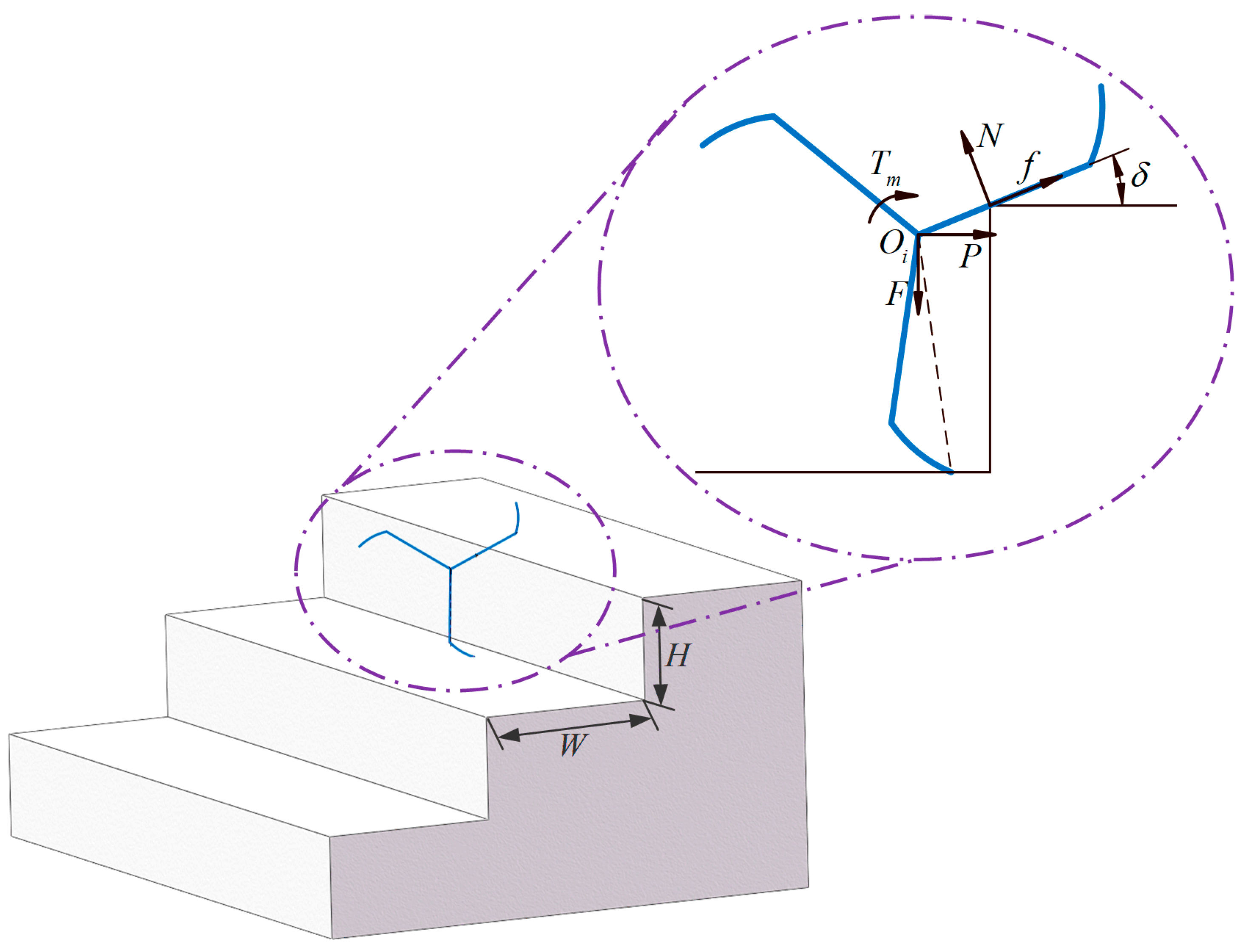
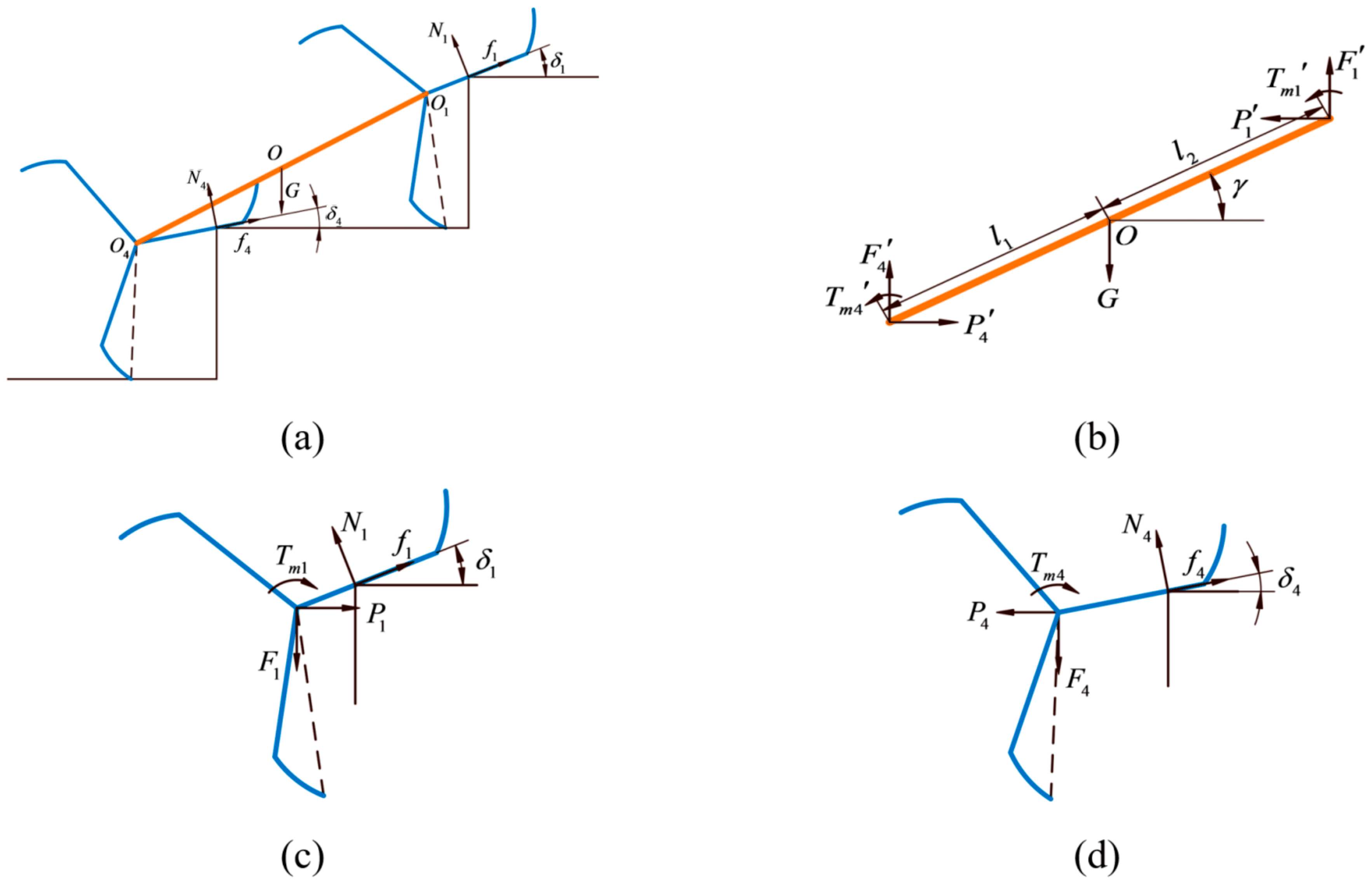
2.1. Statics Modeling
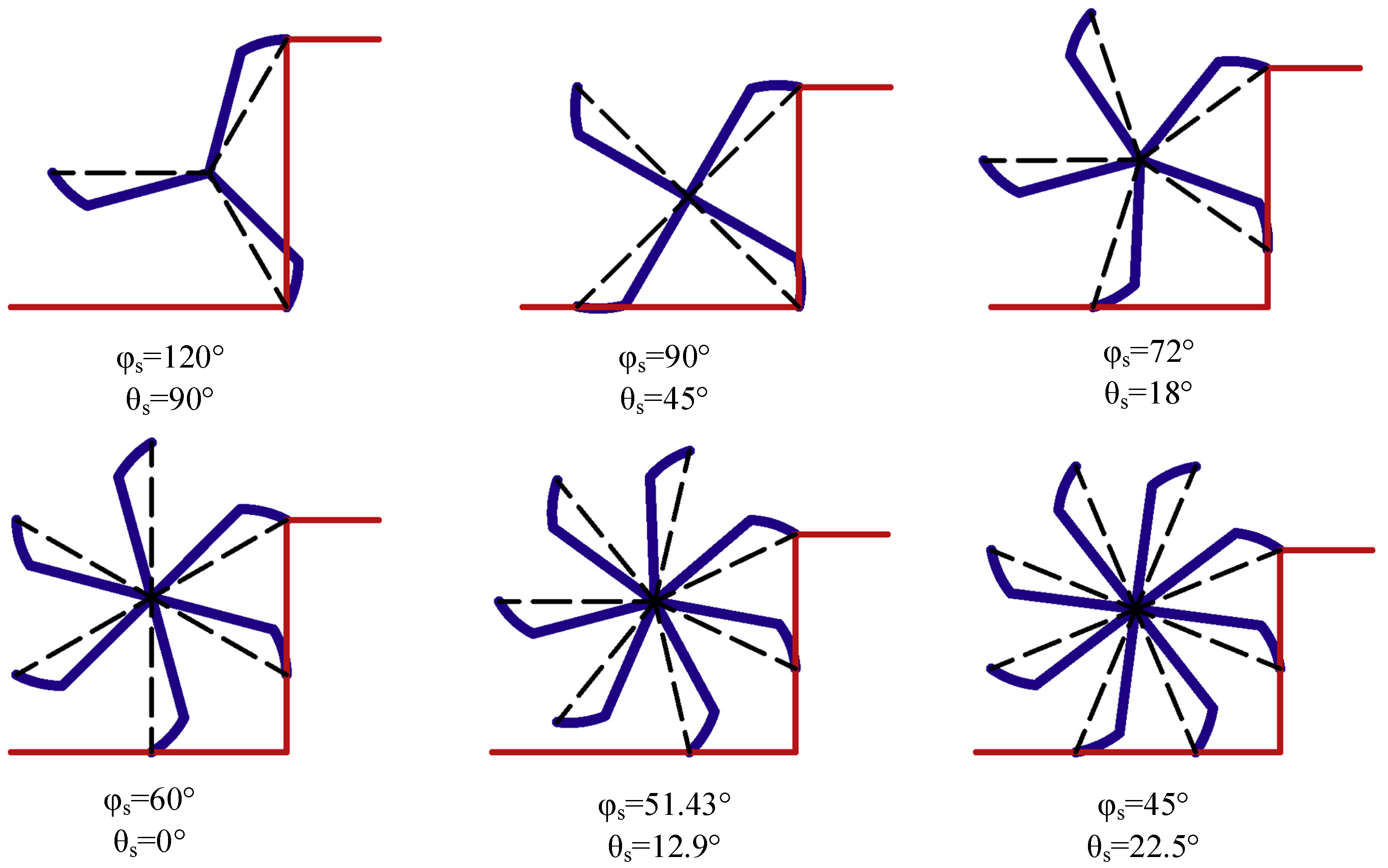
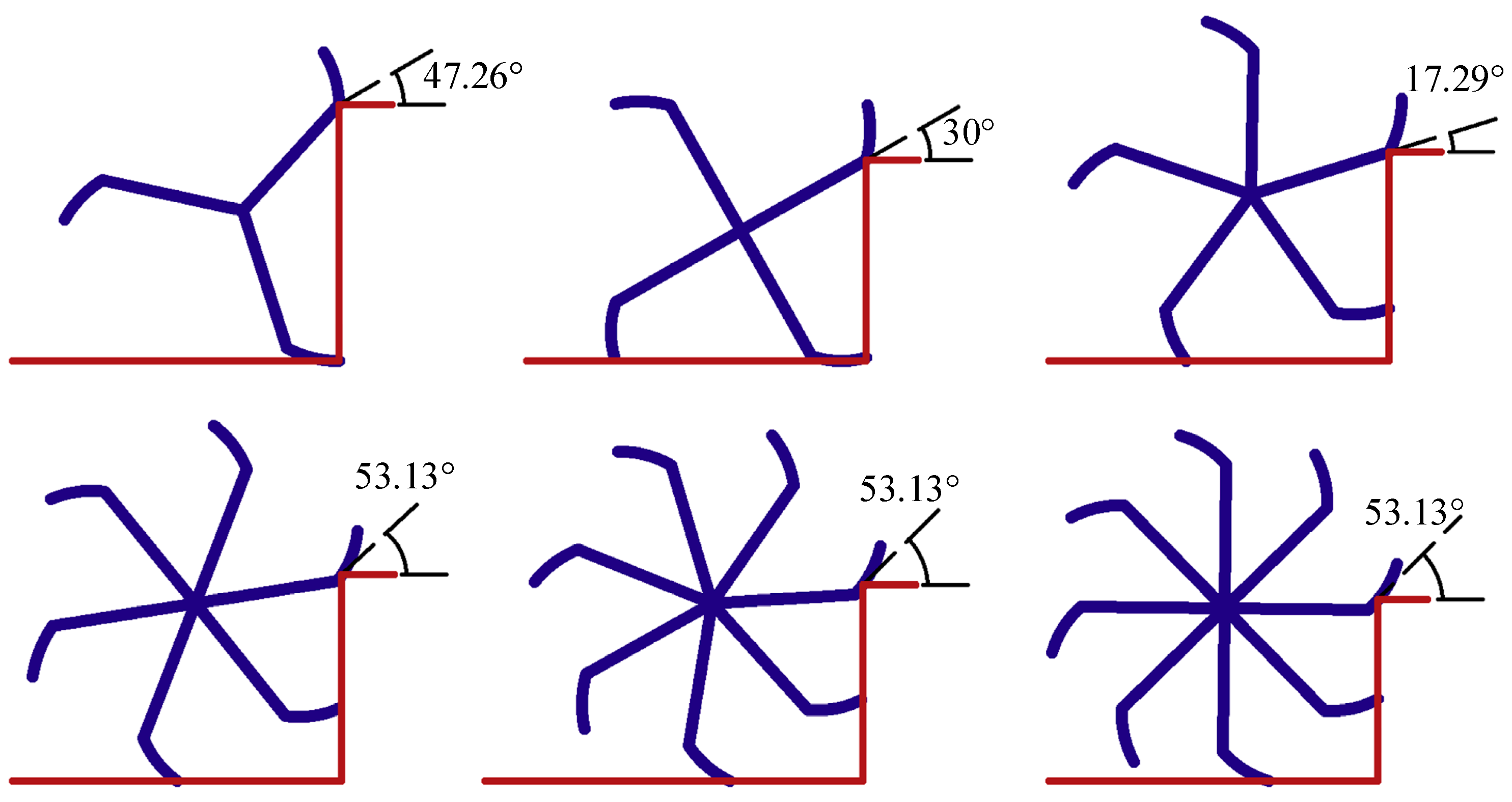
2.2. Geometry Definition and Design
2.3. Further Optimization
3. Curling Mechanism Design
3.1. Key Parameters
3.2. Model Construction
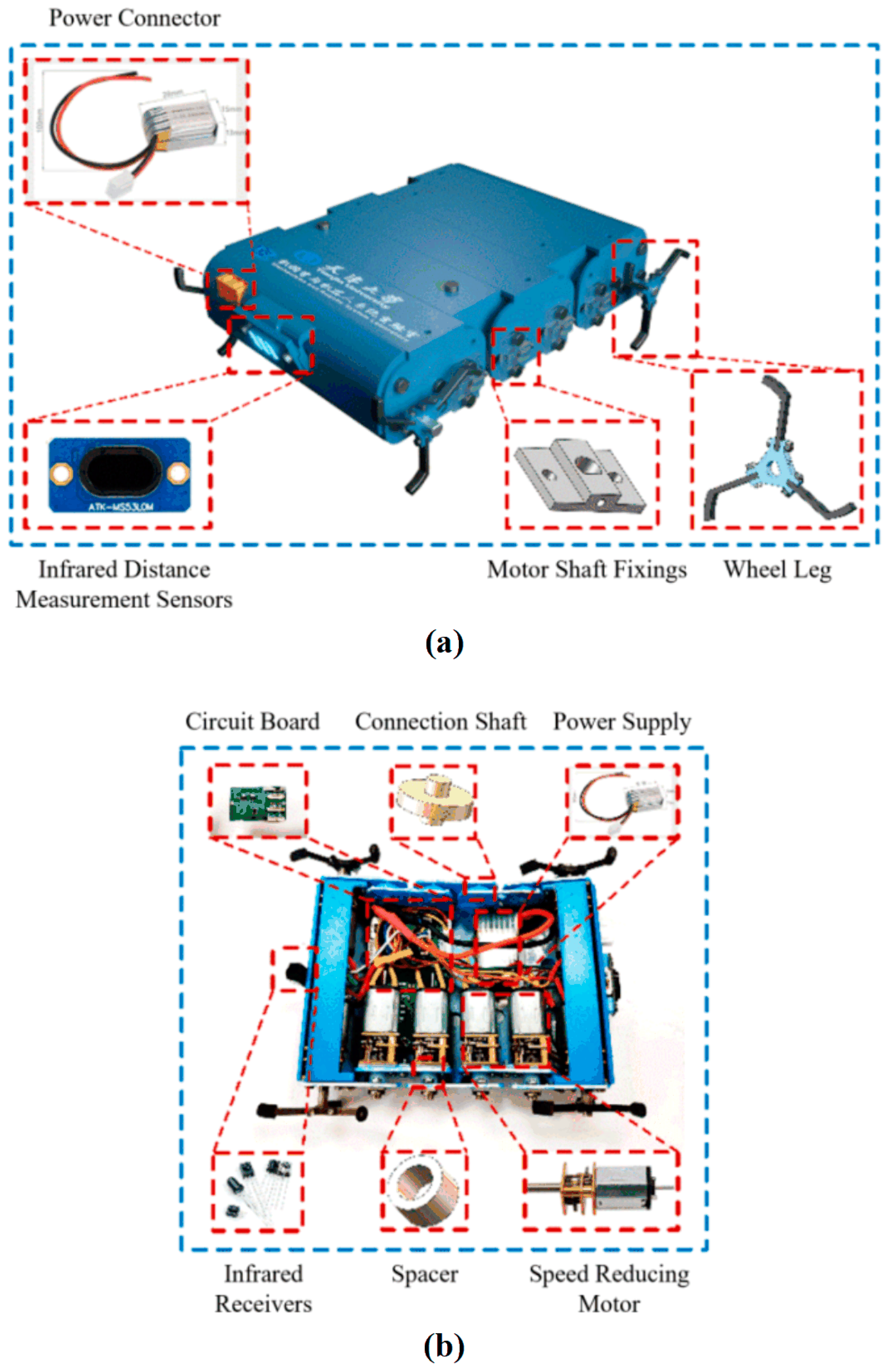
3.3. Prototype Manufacturing
4. Results
4.1. Simulation Settings
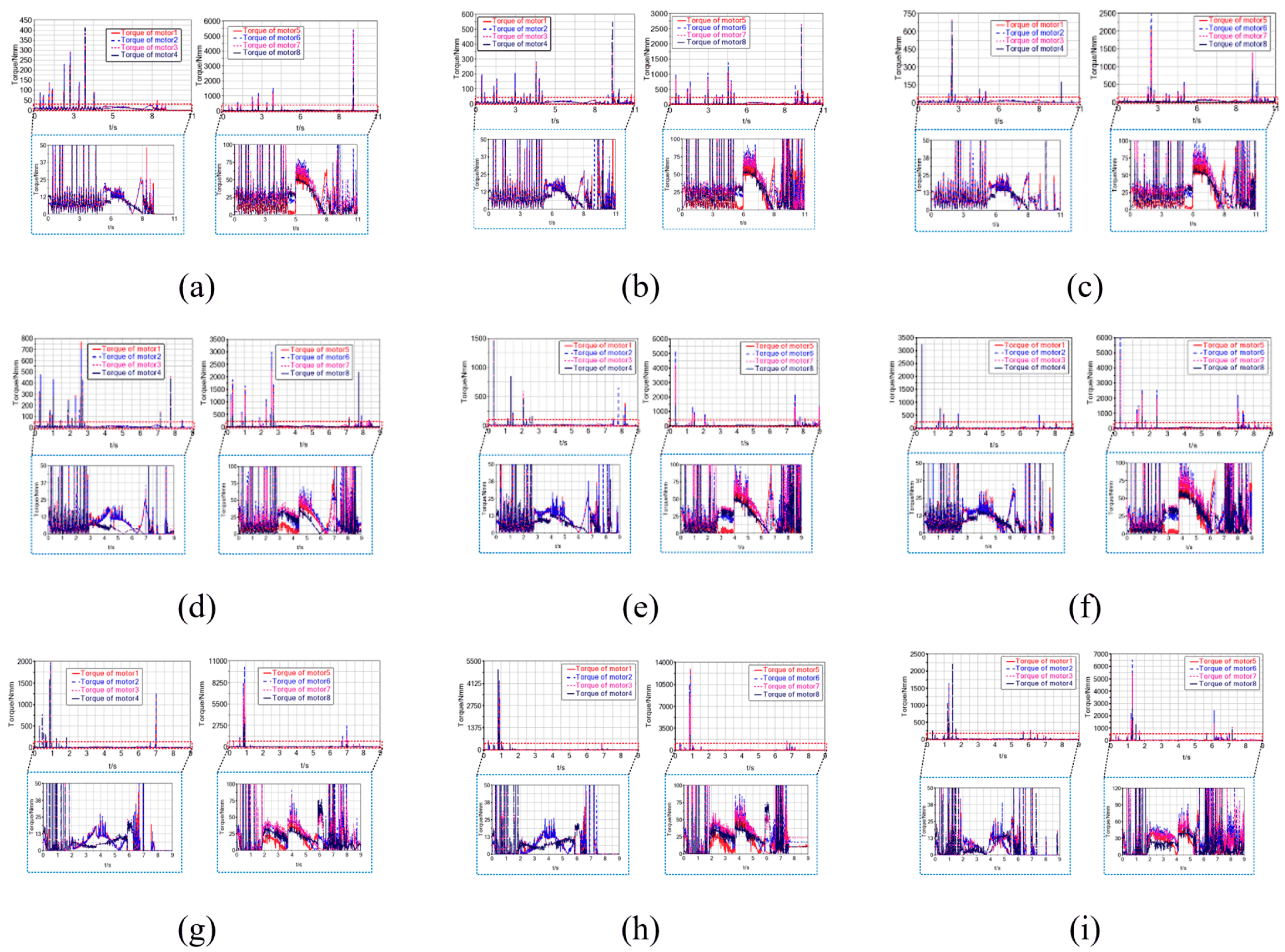
4.2. Comparison and Analysis
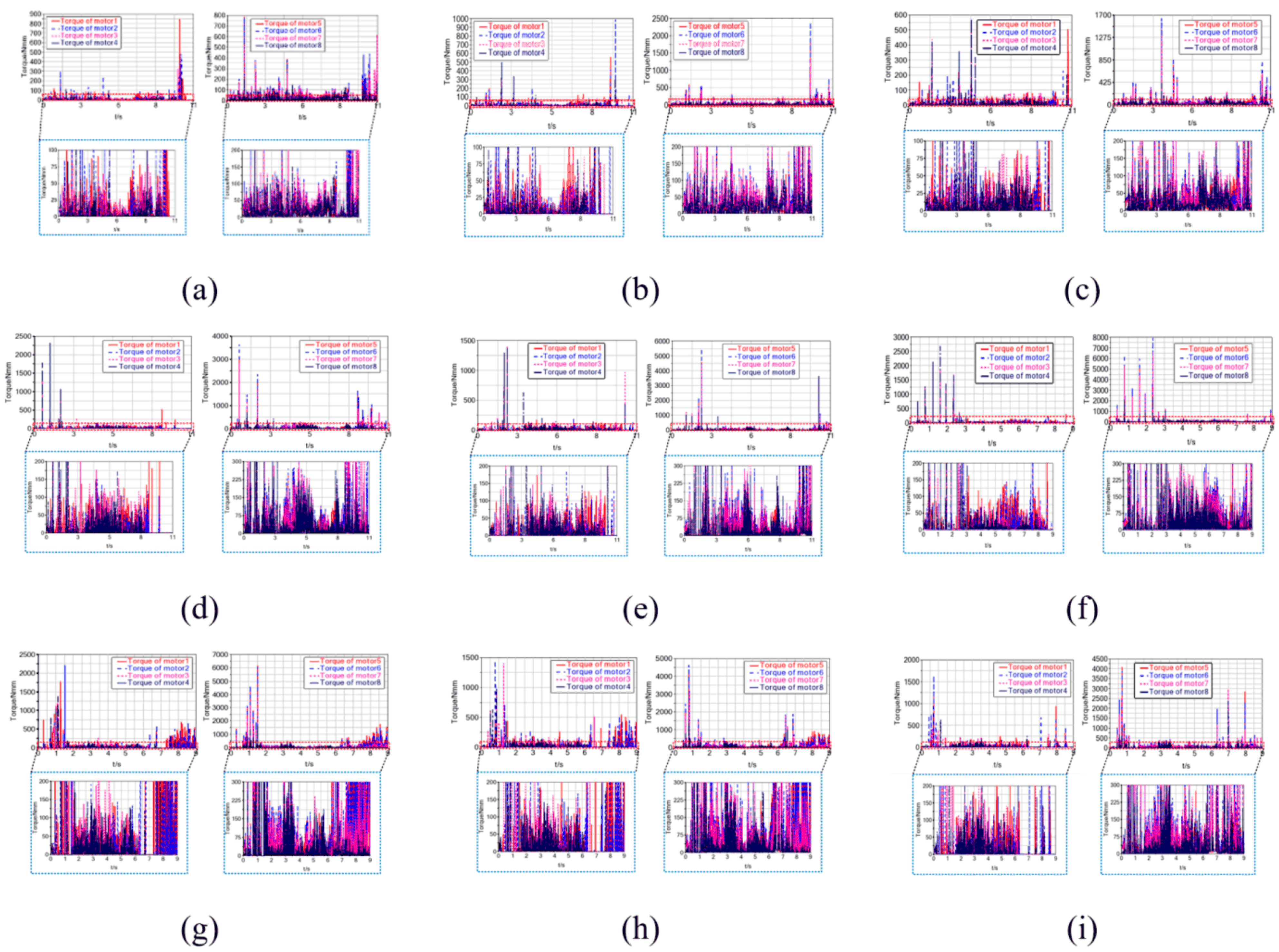
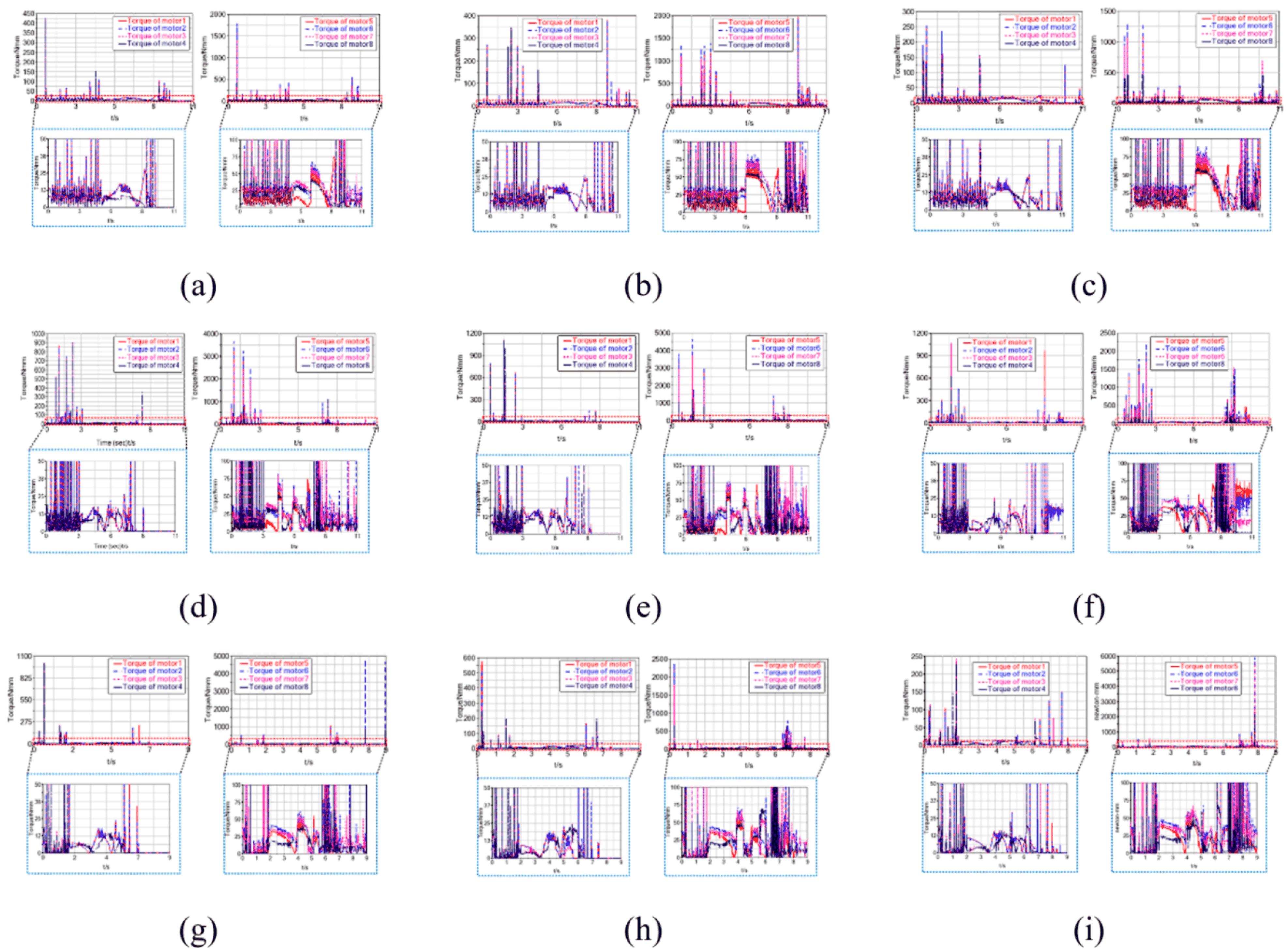
4.2.1. Material: Nylon
4.2.2. Material: Rubber
4.2.3. Material: Acrylic
4.2.4. Material Selection
5. Experiments
5.1. Flatland Experiment
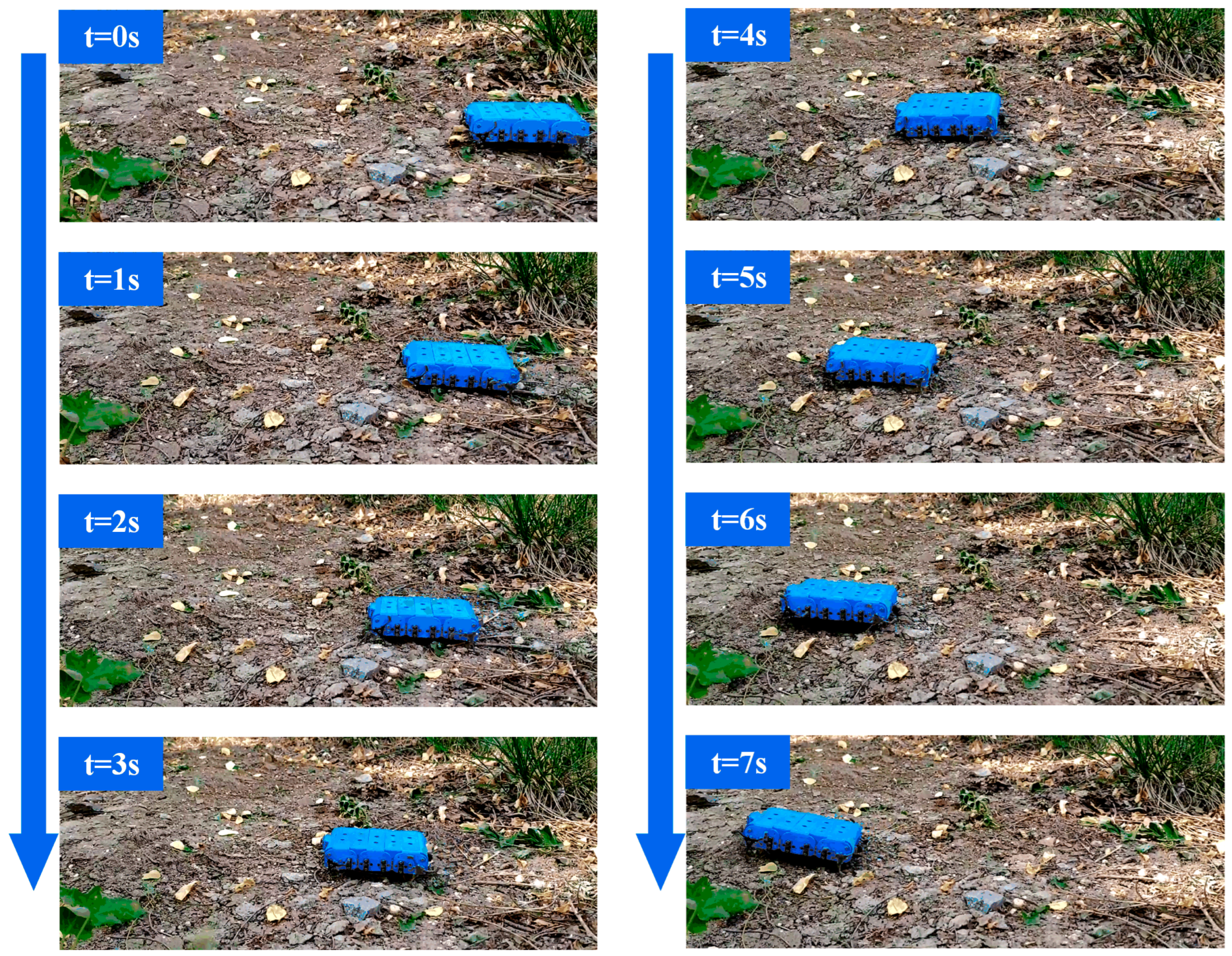
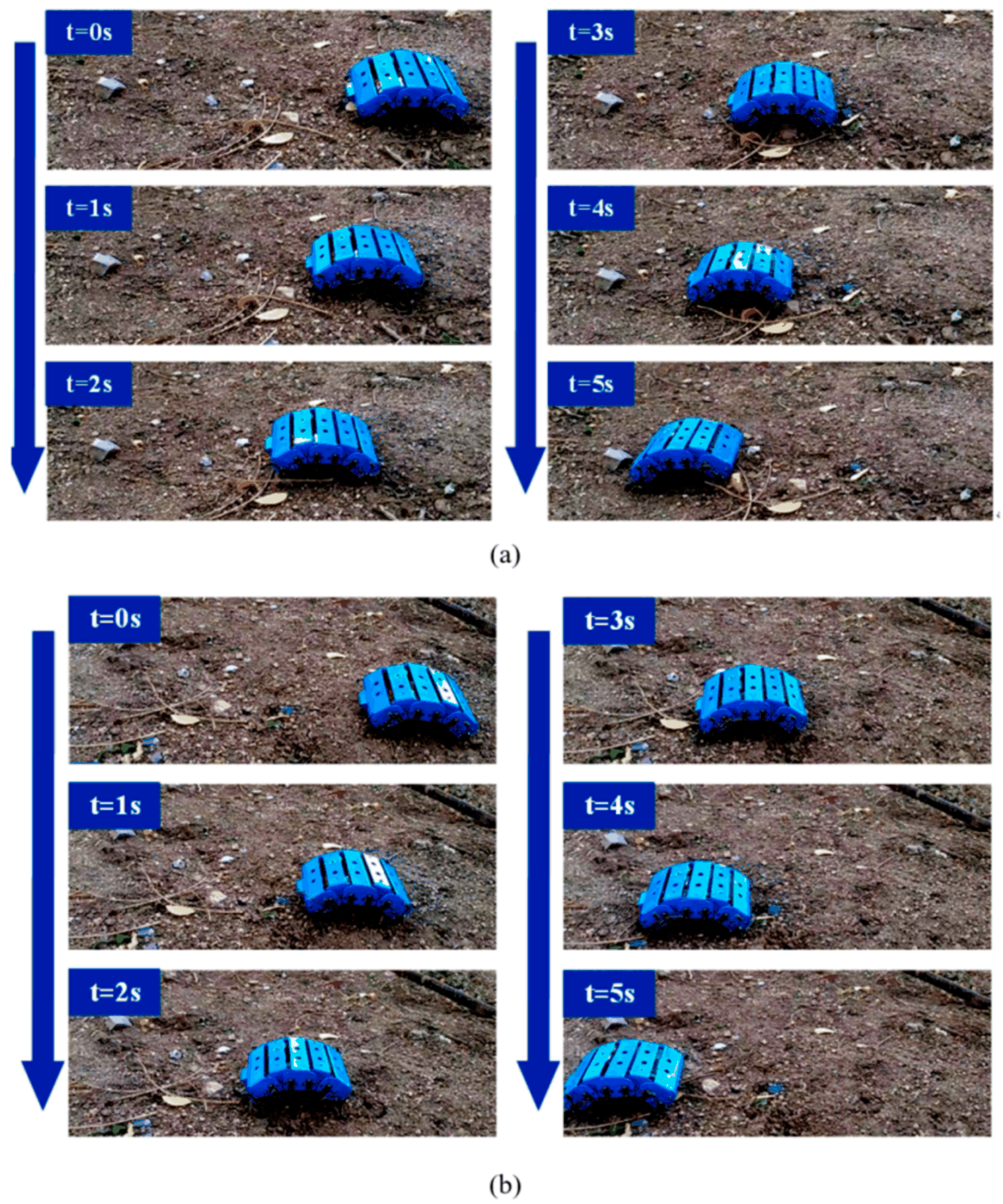
5.1.1. Grassland Experiment
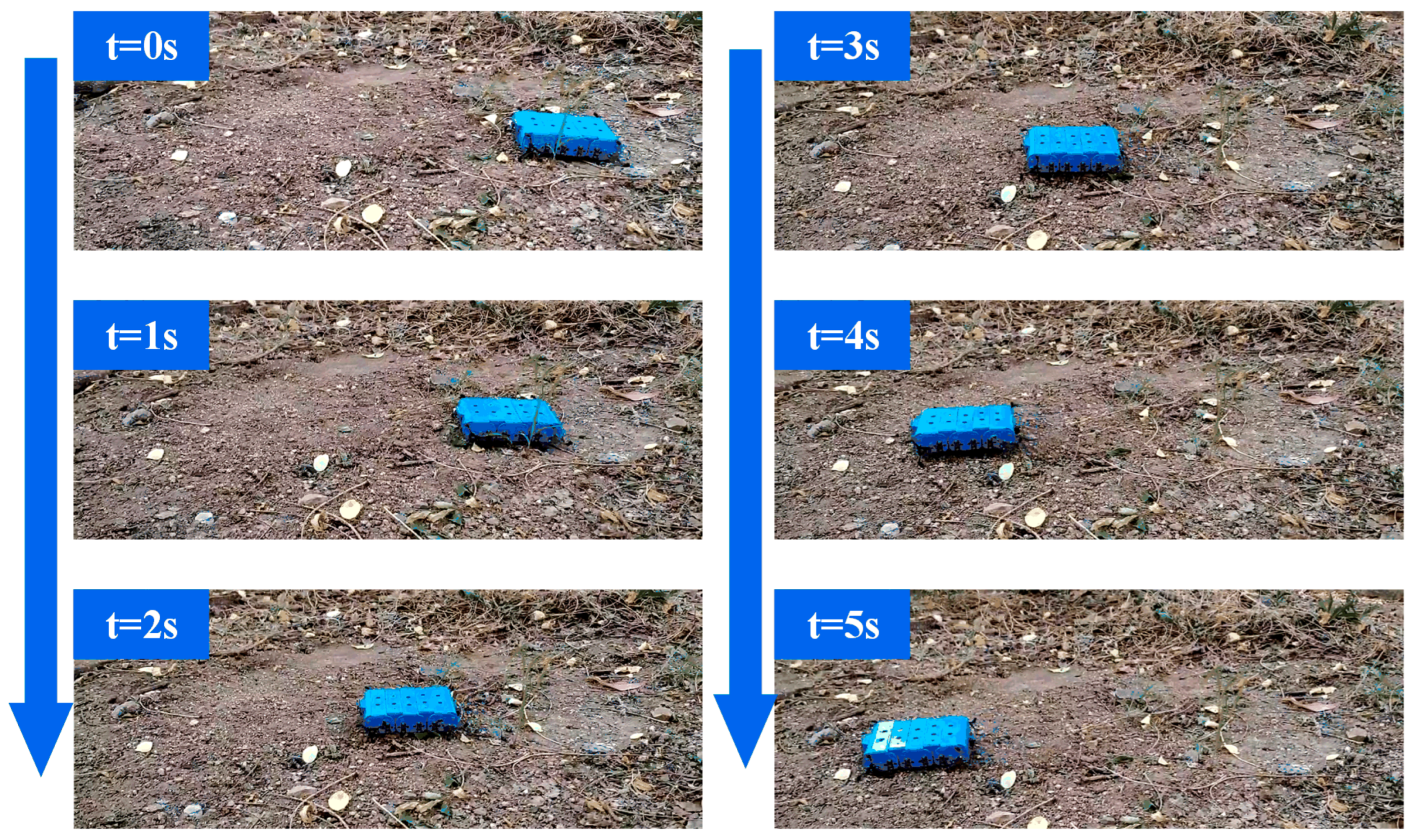
5.1.2. Gritty Land Experiment
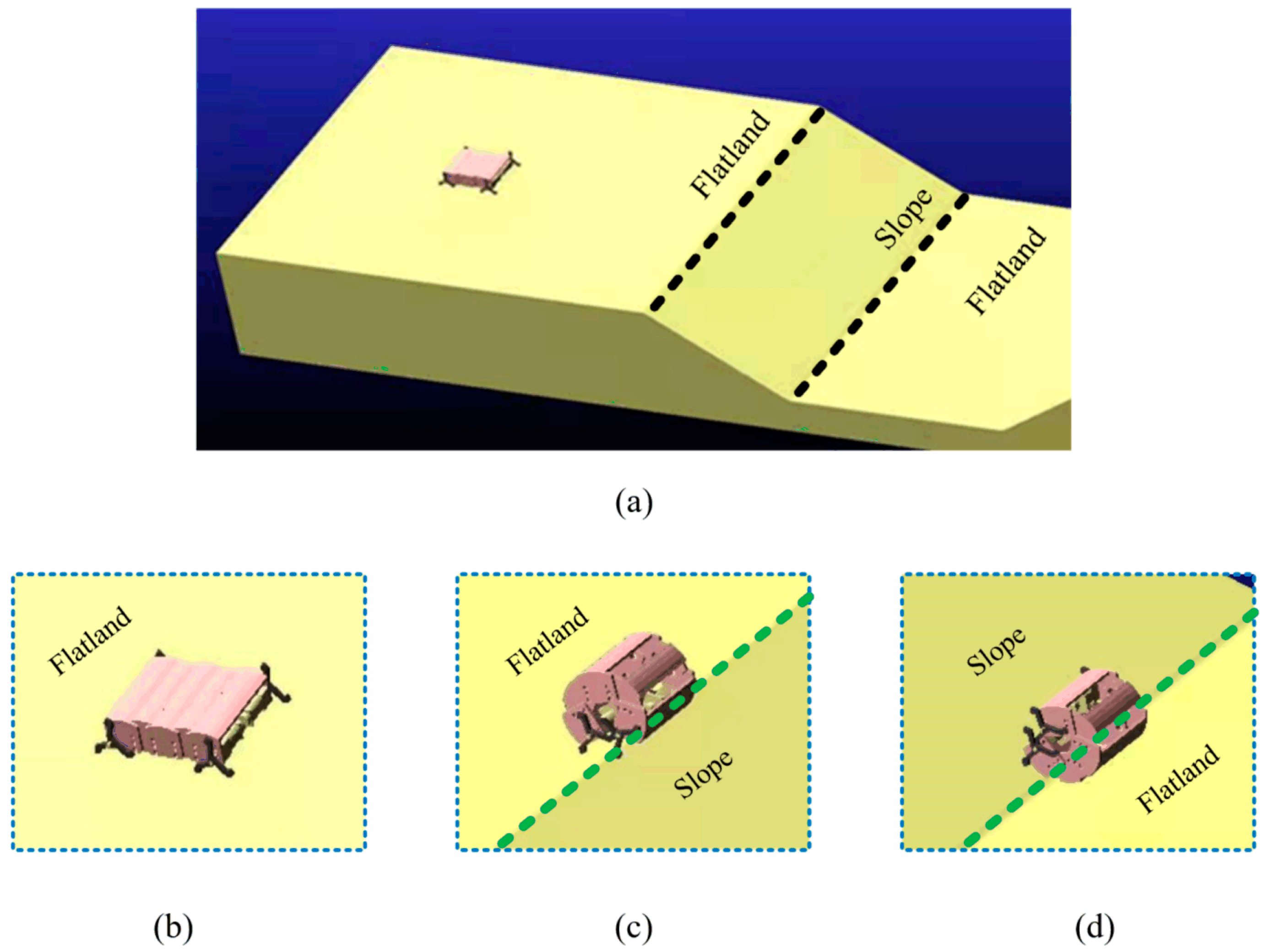
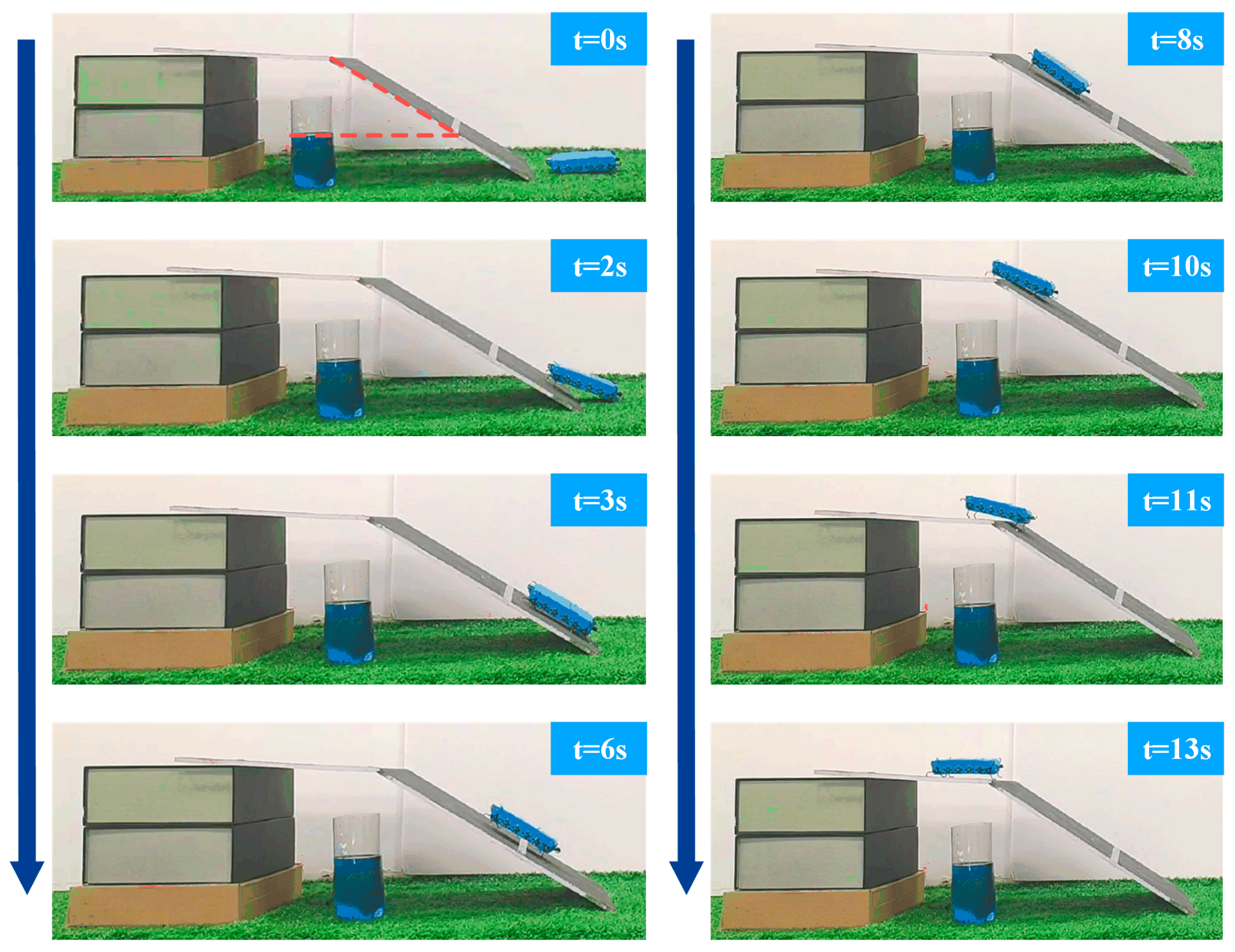
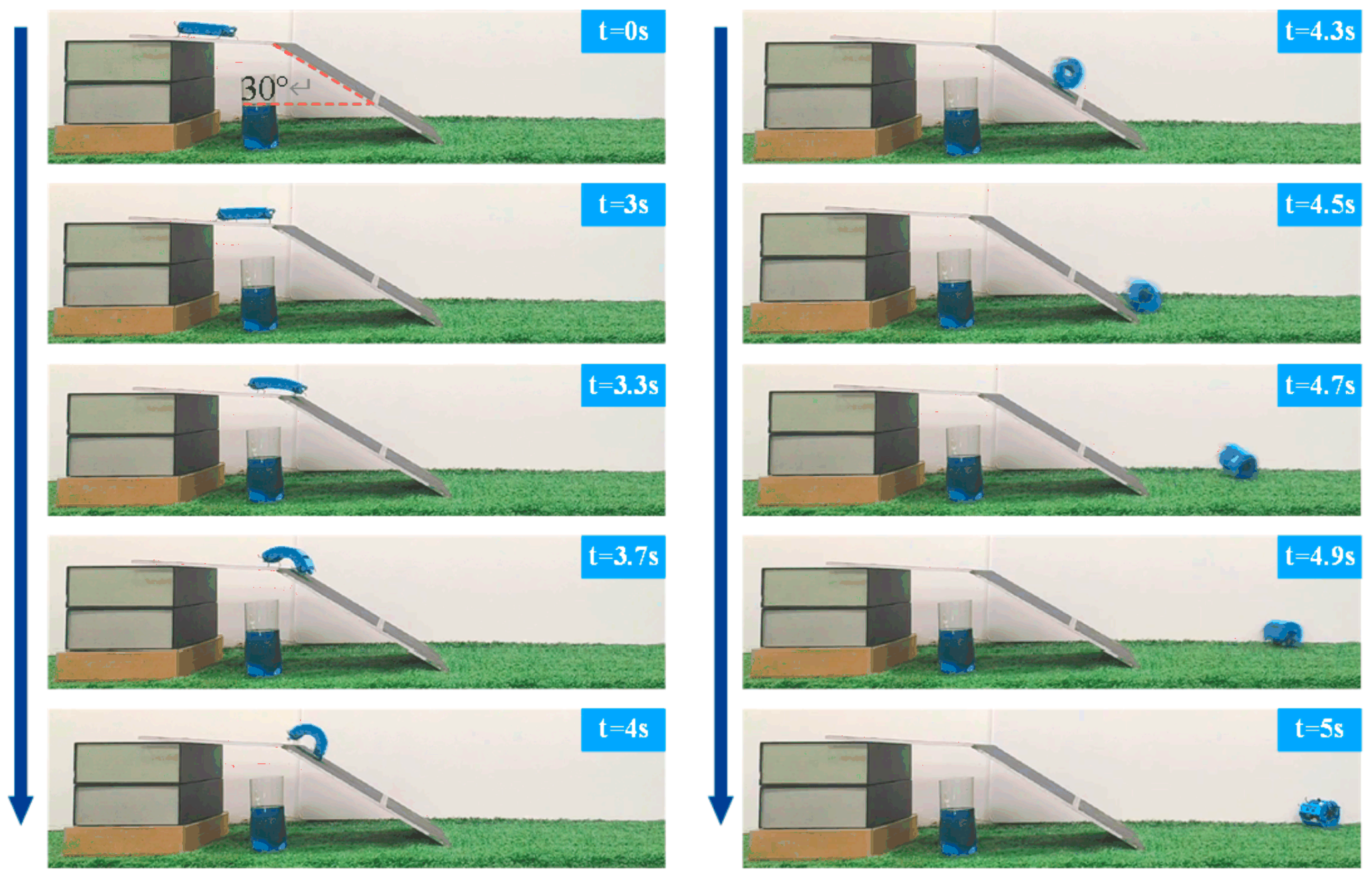
5.2. Climbing Experiment
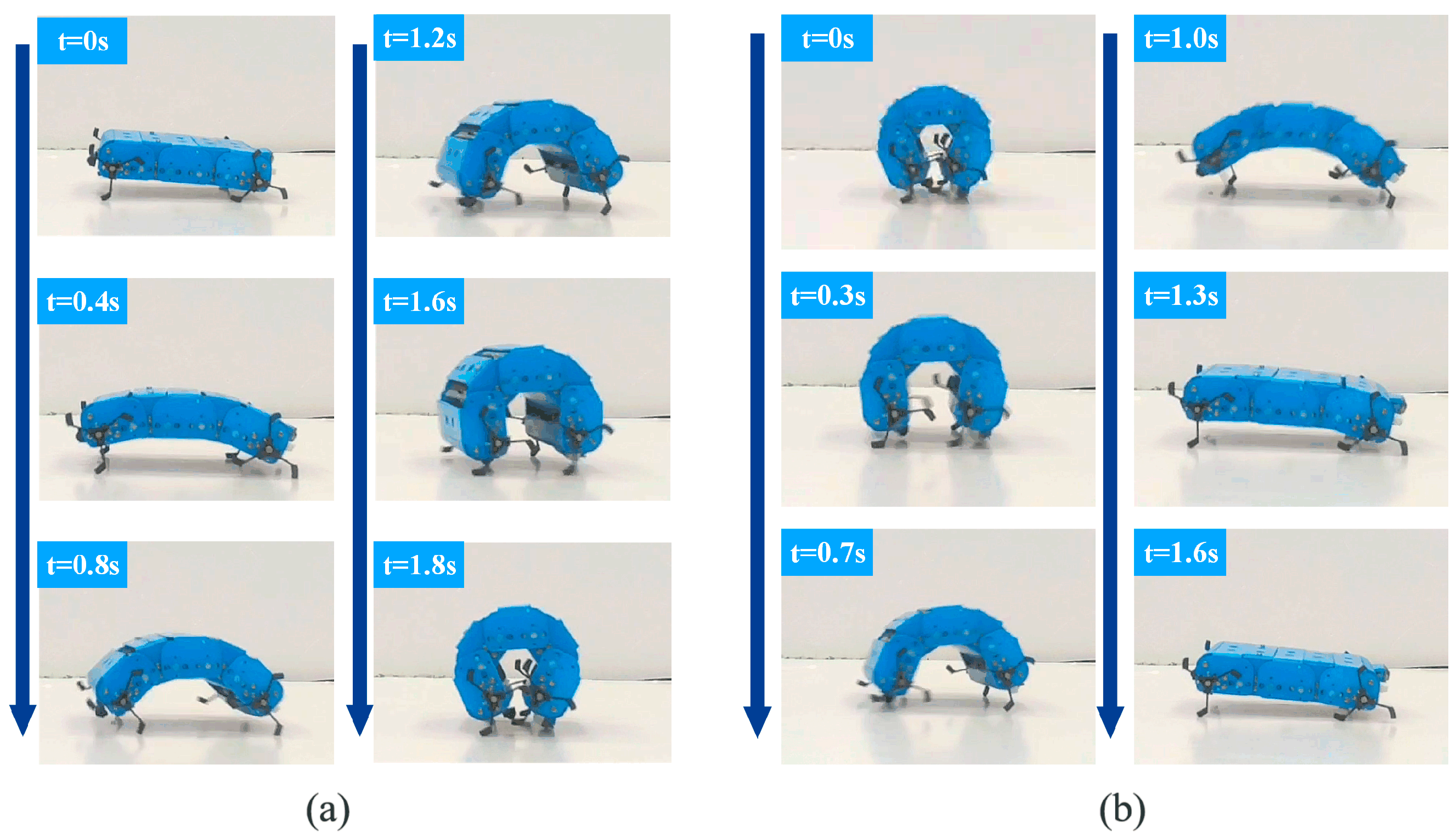
5.3. Curling Experiment
5.4. Summary
6. Conclusions
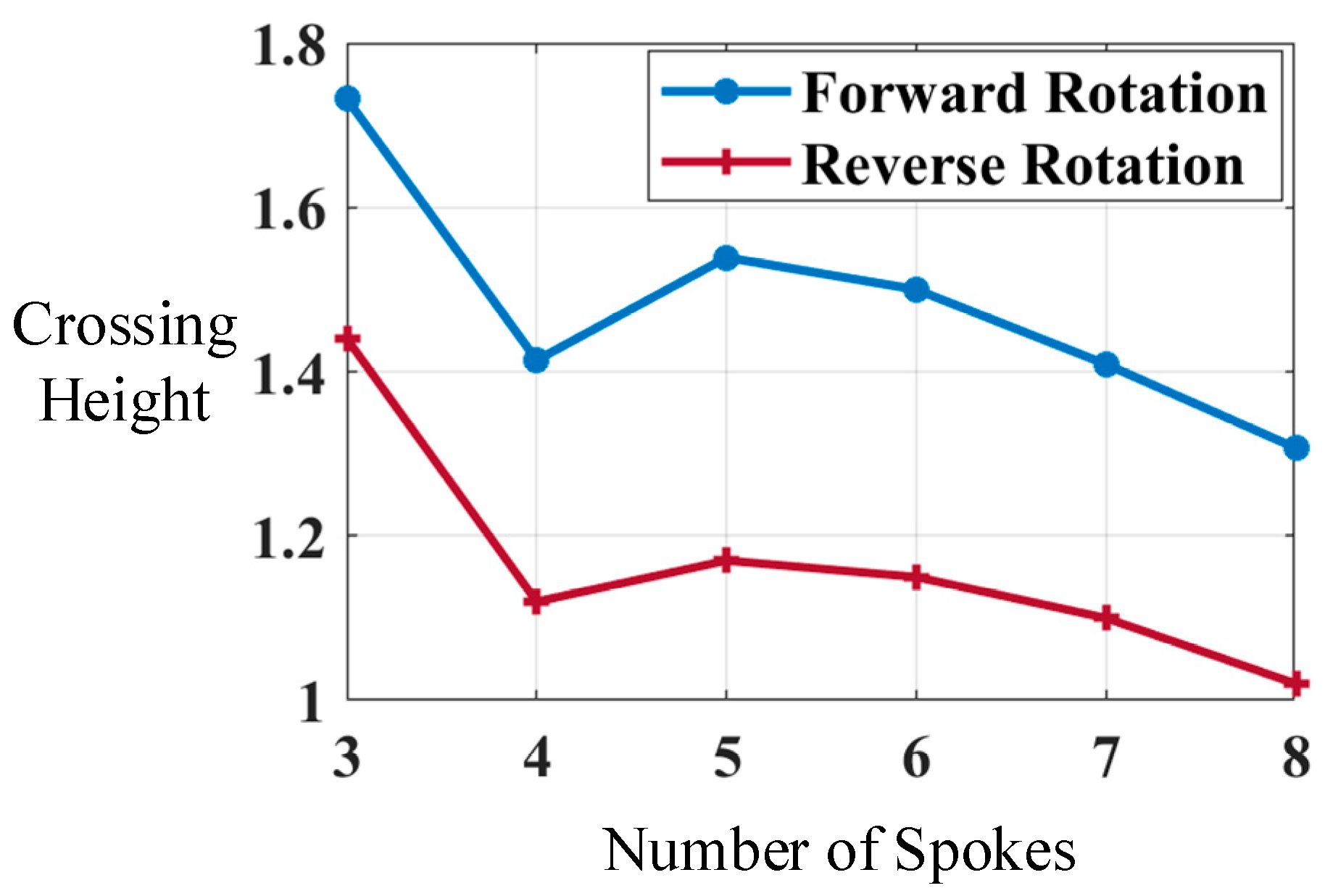
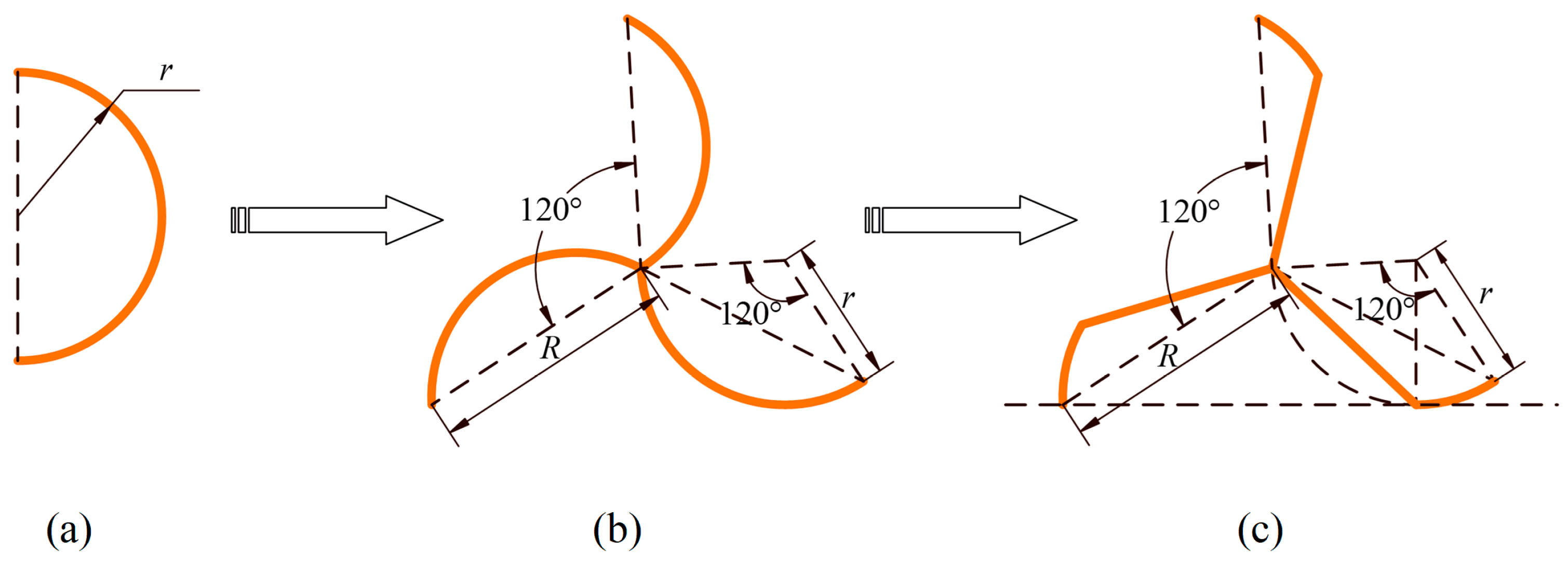
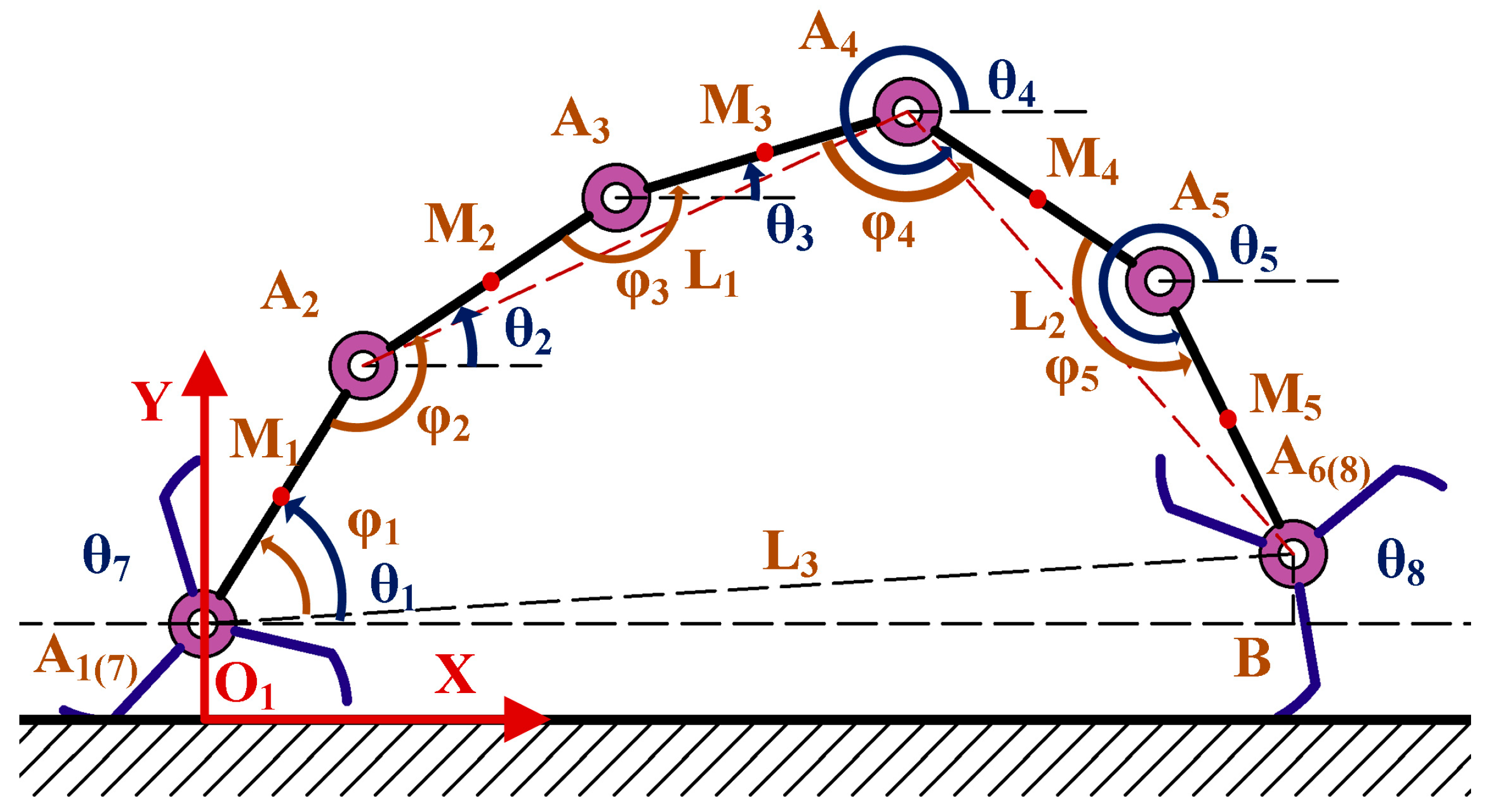
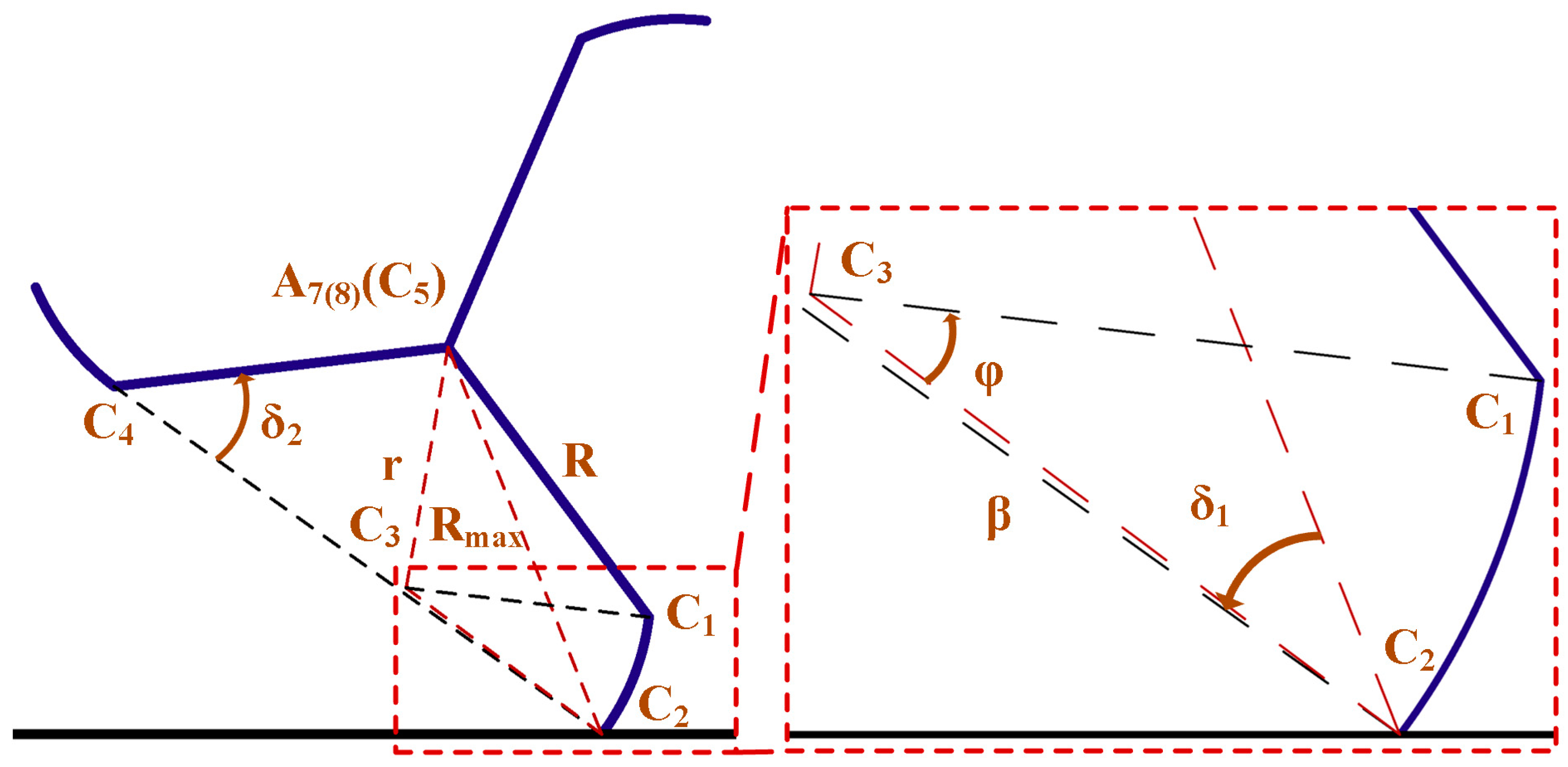
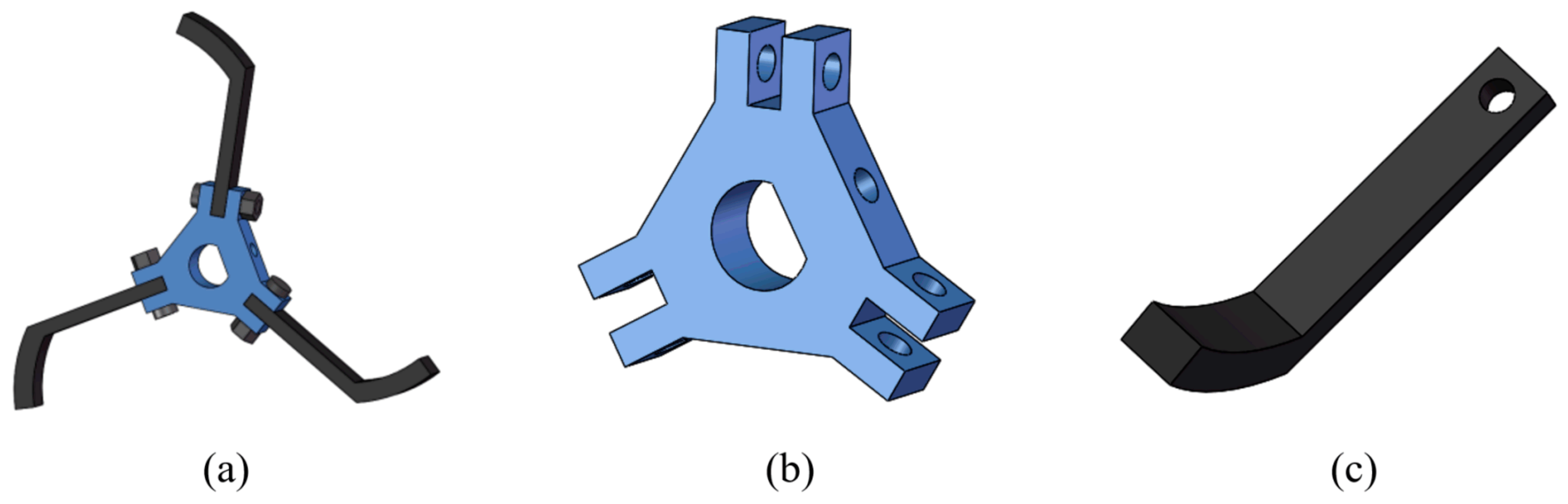
- After statics modeling and analysis, it is determined that the number of spokes of the robot’s wheel-legs is three. Based on the specific step parameters, a geometric analysis is used to determine the chord length of the spokes in the robot’s wheel-leg. The design of the parameters of the wheel-legged structure ensures the satisfactory obstacle-crossing capability of the robot.
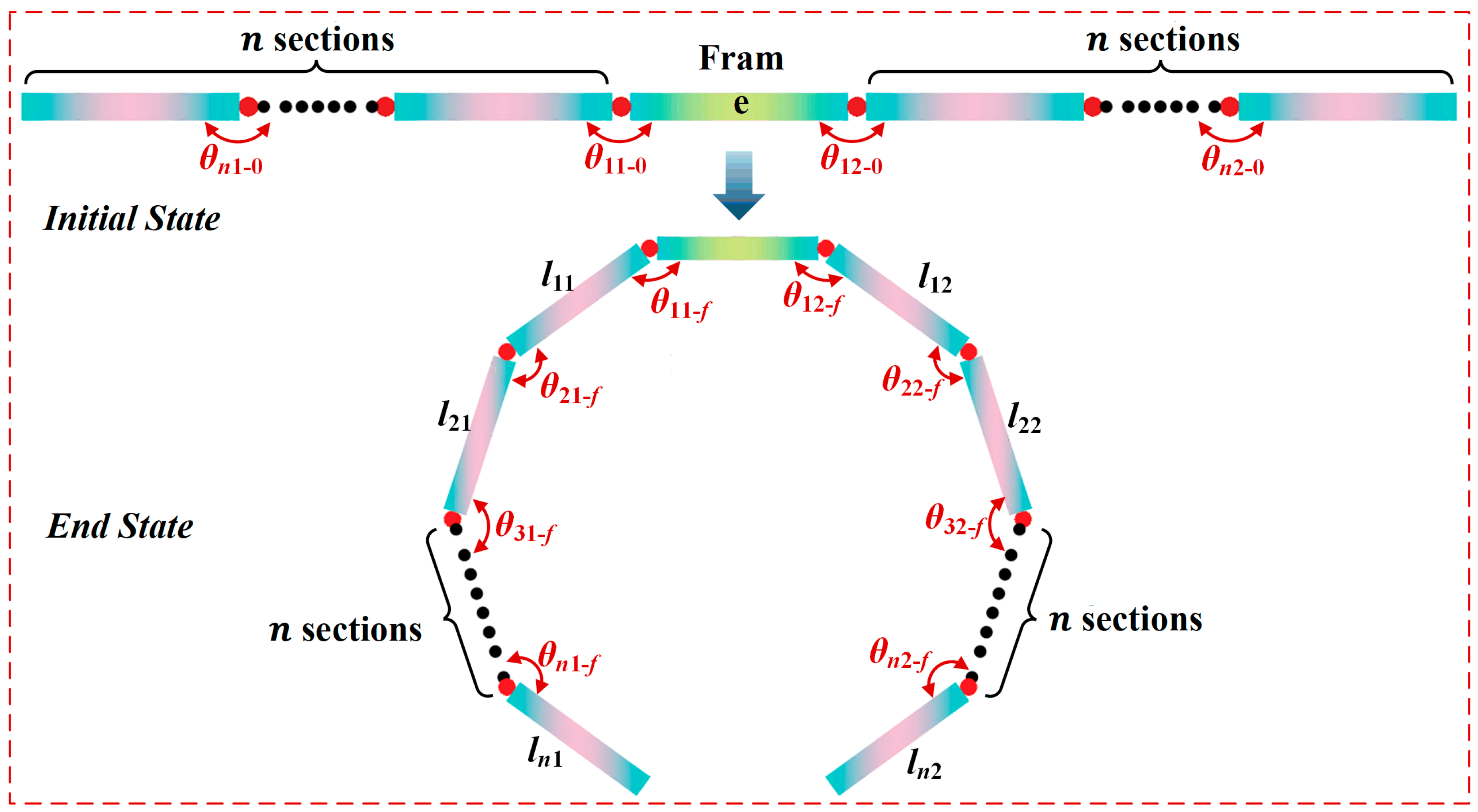
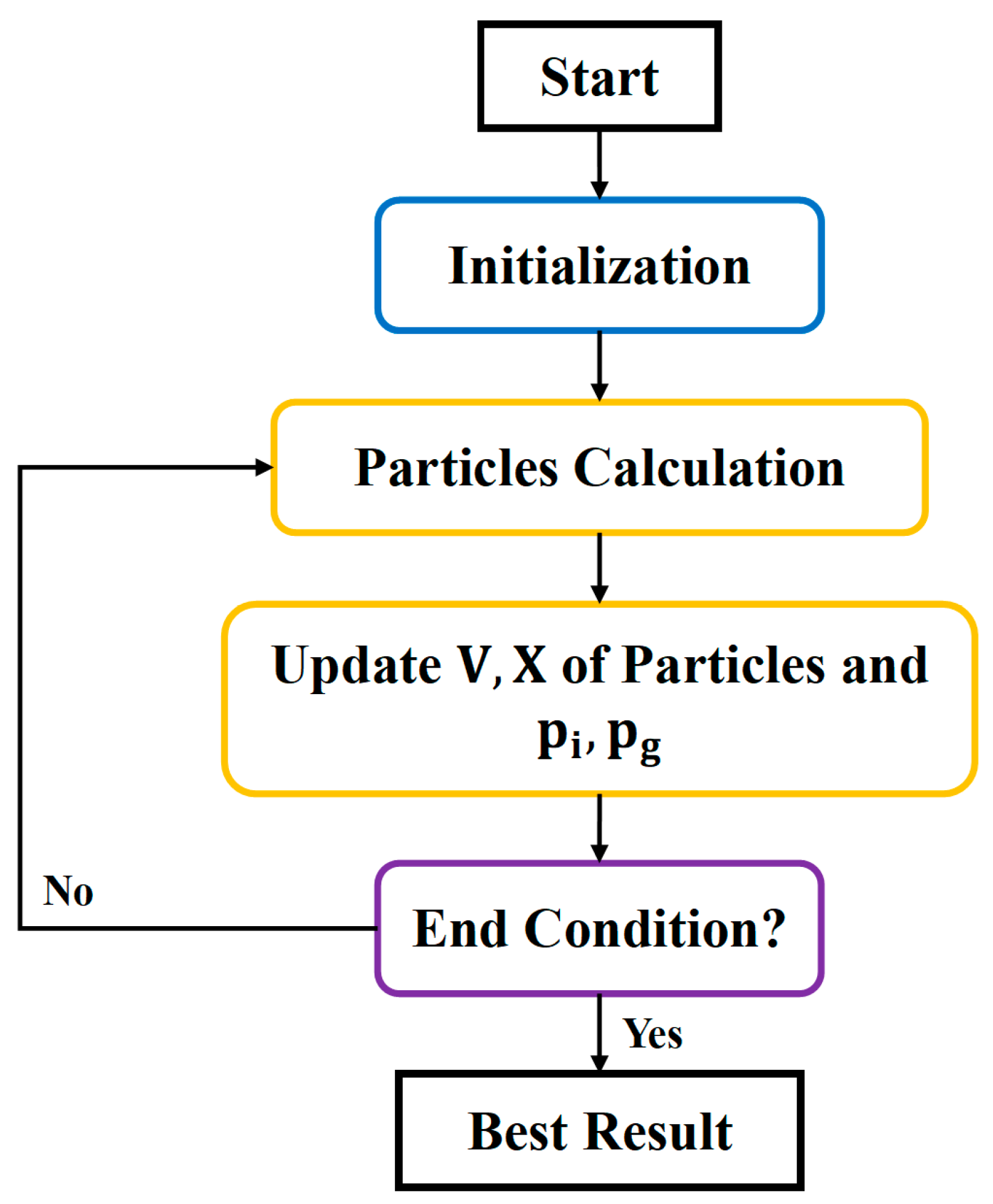
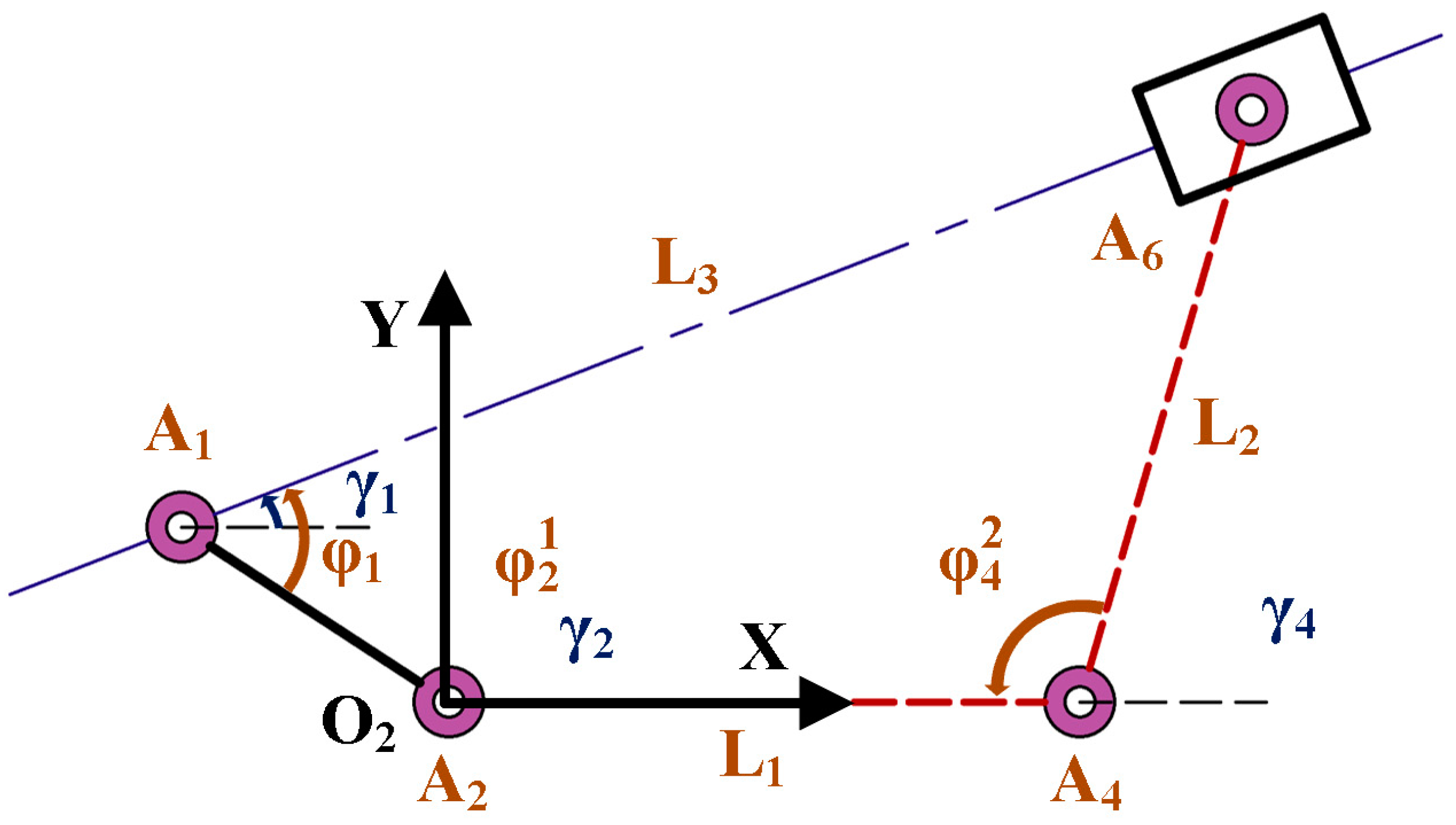
- To further expand the application scenarios of the robot, the curling mechanism is selected as the main robot body. Particle swarm optimization is used to determine the number of robot sections n = 5 and the length of each section l = 16 mm. Based on this result, a prototype robot is made taking into account the strength of the components, the lightweight of the robot body, etc., and the materials for each key part are also determined.
- To improve the working conditions of the drive motor and the curling motor, the material of the wheel-leg in contact with the ground, namely, the wheel-leg cover material is selected after dynamic analysis. After considering the climbing ability and values of torque, etc., rubber is used for the wheel-leg cover.
- After prototype production and wheel-leg cover material selection, experiments are carried out on different terrains, including relatively complex terrains such as grassland, gritty land, and slopes. The robot demonstrates good performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| F | Component force of the robot body on the wheel-leg in the horizontal direction |
| P | Component force of the robot body on the wheel-leg in the vertical direction |
| N | Support force of steps on the wheel-leg |
| f | Friction force of steps on the wheel-leg |
| MN | Torque generated by N at the geometric center of the wheel-leg |
| Mf | Torque generated by f at the geometric center of the wheel-leg |
| Tm | Driving torque generated by the motor on the wheel-leg |
| δ | Angle between the tangent of the wheel-leg at its contact point with a step and the horizontal line |
| μ | Dynamic friction coefficient between the wheel-leg and a step |
| G | Gravity of the robot |
| l1, l2 | Distance from point O to the geometric center of the front/rear wheel-leg |
| γ | Angle between the robot body and the horizontal line |
| r | Radius of curvature of spoke |
| Hs, hs | Crossing height of the wheel-leg |
| R | Chord length of the wheel-leg |
| φs | Angle between spokes |
| θs | Angle between a wheel-leg spoke that contacts the ground and the vertical plane |
| s | Number of spokes |
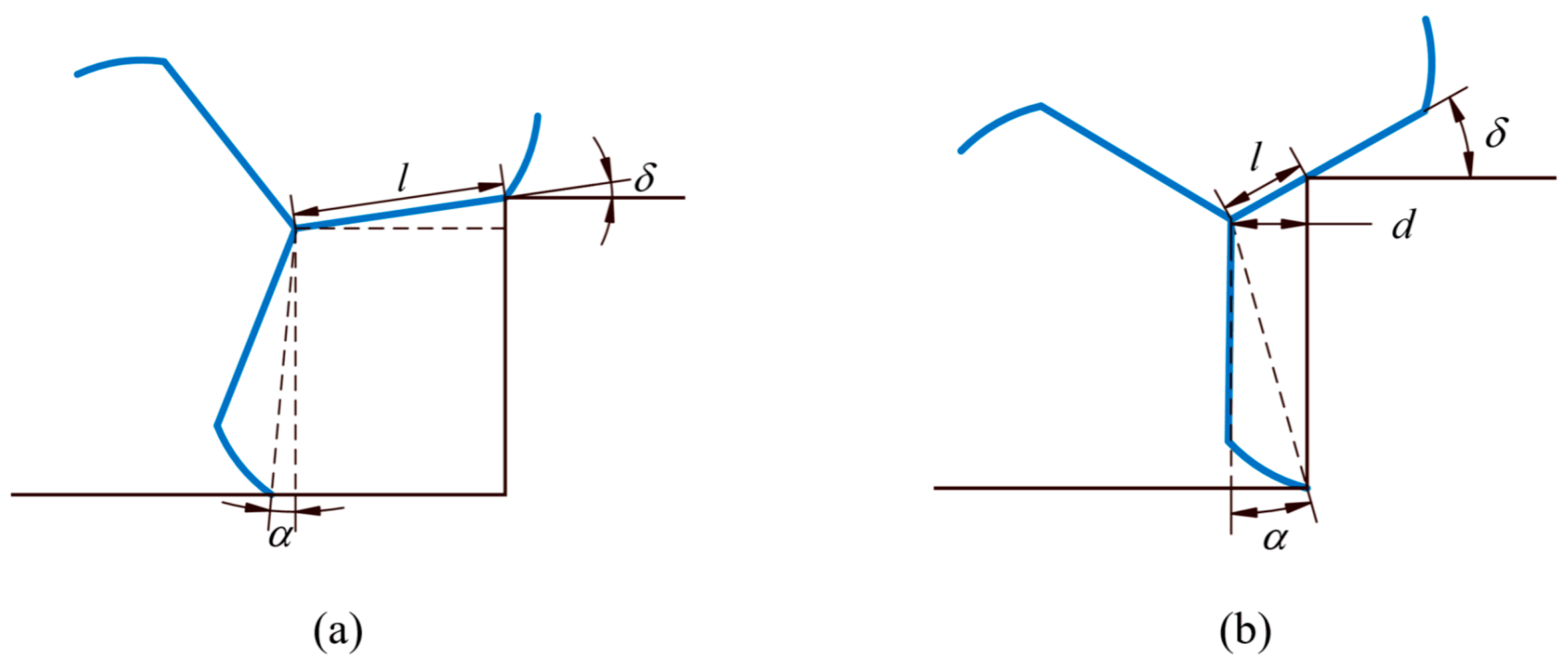
| l | Length between the touching point and the geometric center of the wheel-leg |
| α | Angle of the circular-arc part |
| η | Angle between the touching point and the vertical direction |
| R | Roundness/sum of the difference between each joint angle and π |
| TF | Torque fluctuation during the curling procedure |
| η1, η2 | Optimization coefficient of particle swarm optimization |
Appendix A
References
- Chen, W.H.; Lin, H.S.; Lin, Y.M.; Lin, P.C. TurboQuad: A novel leg–wheel transformable robot with smooth and fast behavioral transitions. IEEE Trans. Robot. 2017, 33, 1025–1040. [Google Scholar] [CrossRef]
- Asci, S.; Zhang, K. Design and Kinematic Simulation of a Novel Leg Mechanism for Multi-Legged Robots. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Virtual, 17–19 August 2021; p. V08BT08A023. [Google Scholar]
- Lee, J.; Hwangbo, J.; Wellhausen, L.; Koltun, V.; Hutter, M. Learning quadrupedal locomotion over challenging terrain. Sci. Robot. 2020, 5, eabc5986. [Google Scholar] [CrossRef] [PubMed]
- Gao, Z.; Zhang, D. Performance analysis, mapping, and multiobjective optimization of a hybrid robotic machine tool. IEEE Trans. Ind. Electron. 2014, 62, 423–433. [Google Scholar] [CrossRef]
- Huang, J.; Wang, Y.; Fang, C.; Yi, M.; Lan, G. Walking Efficiency and Crossing Obstacle Ability of Variable Eccentric Wheel-legged Robot. In Proceedings of the Advances in Materials, Machinery, Electrical Engineering (AMMEE 2017), Tianjin, China, 10–11 June 2017; pp. 298–304. [Google Scholar]
- Smith, L.M.; Quinn, R.D.; Johnson, K.A.; Tuck, W.R. The Tri-Wheel: A novel wheel-leg mobility concept. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 4146–4152. [Google Scholar]
- Zhang, H.; Zhang, X.; Huang, Y.; Du, J.; Zhu, B. A novel reconfigurable wheel-legged mobile mechanism. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Anaheim, CA, USA, 18–21 August 2019; p. V05AT07A011. [Google Scholar]
- Hongbin, Z.; Dongyi, L.; Lianguan, S. Mechanical Design of Dexterous Bionic Leg with Single-DOF Planar Linkage. In Proceedings of the 2018 WRC Symposium on Advanced Robotics and Automation (WRC SARA), Beijing, China, 16 August 2018; pp. 14–21. [Google Scholar]
- Sakamoto, H. Design and Development Education Using Leg/Wheel Hybrid Movement Mechanics for Rough Surfaces. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Boston, MA, USA, 31 October–6 November 2008; pp. 361–366. [Google Scholar]
- Bledt, G.; Powell, M.J.; Katz, B.; Di Carlo, J.; Wensing, P.M.; Kim, S. Mit cheetah 3: Design and control of a robust, dynamic quadruped robot. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 2245–2252. [Google Scholar]
- Hutter, M.; Gehring, C.; Lauber, A.; Gunther, F.; Bellicoso, C.D.; Tsounis, V.; Fankhauser, P.; Diethelm, R.; Bachmann, S.; Blösch, M. Anymal-toward legged robots for harsh environments. Adv. Robot. 2017, 31, 918–931. [Google Scholar] [CrossRef]
- Seok, S.; Wang, A.; Chuah, M.Y.; Hyun, D.J.; Lee, J.; Otten, D.M.; Lang, J.H.; Kim, S. Design principles for energy-efficient legged locomotion and implementation on the MIT cheetah robot. IEEE/Asme Trans. Mechatron. 2014, 20, 1117–1129. [Google Scholar] [CrossRef]
- Zhu, Y.; Fei, Y.; Xu, H. Stability analysis of a wheel-track-leg hybrid mobile robot. J. Intell. Robot. Syst. 2018, 91, 515–528. [Google Scholar] [CrossRef]
- Khan, H.; Iqbal, J.; Baizid, K.; Zielinska, T. Longitudinal and lateral slip control of autonomous wheeled mobile robot for trajectory tracking. Front. Inf. Technol. Electron. Eng. 2015, 16, 166–172. [Google Scholar] [CrossRef]
- Jun, Z.; Changying, J.; Chengliang, L. Visual navigation system of agricultural wheeled-mobile robot. Trans. Chin. Soc. Agric. Mach. 2005, 36, 90–94. [Google Scholar]
- Liu, J.; Zhan, J.; Guo, C.; Lei, T.; Li, Y. Data logic structure and key technologies on intelligent high-precision map. J. Geod. Geoinf. Sci. 2020, 3, 1. [Google Scholar]
- Xie, Y.; Zhang, X.; Meng, W.; Zheng, S.; Jiang, L.; Meng, J.; Wang, S. Coupled fractional-order sliding mode control and obstacle avoidance of a four-wheeled steerable mobile robot. ISA Trans. 2021, 108, 282–294. [Google Scholar] [CrossRef]
- Oriolo, G.; De Luca, A.; Vendittelli, M. WMR control via dynamic feedback linearization: Design, implementation, and experimental validation. IEEE Trans. Control. Syst. Technol. 2002, 10, 835–852. [Google Scholar] [CrossRef]
- Drotman, D.; Jadhav, S.; Sharp, D.; Chan, C.; Tolley, M.T. Electronics-free pneumatic circuits for controlling soft-legged robots. Sci. Robot. 2021, 6, eaay2627. [Google Scholar] [CrossRef] [PubMed]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, eaaz1012. [Google Scholar] [CrossRef] [PubMed]
- Dang, T.; Tranzatto, M.; Khattak, S.; Mascarich, F.; Alexis, K.; Hutter, M. Graph-based subterranean exploration path planning using aerial and legged robots. J. Field Robot. 2020, 37, 1363–1388. [Google Scholar] [CrossRef]
- Li, Y.; Ge, S.; Zhu, H.; Liu, J. Obstacle-surmounting mechanism and capability of four-track robot with two swing arms. Robot 2010, 32, 157–165. [Google Scholar] [CrossRef]
- Xu, S.; Peng, H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 21, 48–58. [Google Scholar] [CrossRef]
- Reid, W.; Göktogan, A.H.; Sukkarieh, S. Moving mammoth: Stable motion for a reconfigurable wheel-on-leg rover. In Proceedings of the Australasian Conference on Robotics and Automation, Online, 6–8 December 2014; pp. 1–10. [Google Scholar]
- Wang, S.; Chen, Z.; Li, J.; Wang, J.; Li, J.; Zhao, J. Flexible motion framework of the six wheel-legged robot: Experimental results. IEEE/ASME Trans. Mechatron. 2021, 27, 2246–2257. [Google Scholar] [CrossRef]
- Li, J.; Wang, J.; Peng, H.; Zhang, L.; Hu, Y.; Su, H. Neural fuzzy approximation enhanced autonomous tracking control of the wheel-legged robot under uncertain physical interaction. Neurocomputing 2020, 410, 342–353. [Google Scholar] [CrossRef]
- Chen, Z.; Wang, S.; Wang, J.; Xu, K.; Lei, T.; Zhang, H.; Wang, X.; Liu, D.; Si, J. Control strategy of stable walking for a hexapod wheel-legged robot. ISA Trans. 2021, 108, 367–380. [Google Scholar] [CrossRef]
- Lu, D.; Dong, E.; Liu, C.; Xu, M.; Yang, J. Design and development of a leg-wheel hybrid robot “HyTRo-I”. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 6031–6036. [Google Scholar]
- Lacagnina, M.; Muscato, G.; Sinatra, R. Kinematics, dynamics and control of a hybrid robot wheeleg. Robot. Auton. Syst. 2003, 45, 161–180. [Google Scholar] [CrossRef]
- Chen, S.-C.; Huang, K.-J.; Chen, W.-H.; Shen, S.-Y.; Li, C.-H.; Lin, P.-C. Quattroped: A leg—Wheel transformable robot. IEEE/ASME Trans. Mechatron. 2013, 19, 730–742. [Google Scholar] [CrossRef]
- Eich, M.; Grimminger, F.; Bosse, S.; Spenneberg, D.; Kirchner, F. Asguard: A hybrid-wheel security and sar-robot using bio-inspired locomotion for rough terrain. Proc. ROBIO 2008, 2008, 774–779. [Google Scholar]
- Campbell, D.; Buehler, M. Stair descent in the simple hexapod’RHex’. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation (Cat. No. 03CH37422), Taipei, Taiwan, 14–19 September 2003; pp. 1380–1385. [Google Scholar]
- Li, Z.; Ma, S.; Li, B.; Wang, M.; Wang, Y. Development of a transformable wheel-track robot with self-adaptive ability. Jixie Gongcheng Xuebao (Chin. J. Mech. Eng.) 2011, 47, 1–10. [Google Scholar] [CrossRef]
- Luo, Z.; Shang, J.; Wei, G.; Ren, L. A reconfigurable hybrid wheel-track mobile robot based on Watt II six-bar linkage. Mech. Mach. Theory 2018, 128, 16–32. [Google Scholar] [CrossRef]
- Guo, W.; Qiu, J.; Xu, X.; Wu, J. TALBOT: A Track-Leg Transformable Robot. Sensors 2022, 22, 1470. [Google Scholar] [CrossRef] [PubMed]
- Nagatani, K.; Kinoshita, H.; Yoshida, K.; Tadakuma, K.; Koyanagi, E. Development of leg-track hybrid locomotion to traverse loose slopes and irregular terrain. J. Field Robot. 2011, 28, 950–960. [Google Scholar] [CrossRef]
- Xin, J.; Li, X.; Wang, Z.; Yao, C.; Yuan, P. Performance analysis of track-leg mobile robot in unstructured environment. Robot 2004, 26, 35–39. [Google Scholar]
- Bruzzone, L.; Baggetta, M.; Nodehi, S.E.; Bilancia, P.; Fanghella, P. Functional design of a hybrid leg-wheel-track ground mobile robot. Machines 2021, 9, 10. [Google Scholar] [CrossRef]
- Hou, F.; Yuan, J.; Li, K.; Wang, Z. Design and analysis of a multi-configuration wheel-leg hybrid drive robot machine. Int. J. Adv. Robot. Syst. 2023, 2, 17298806231163828. [Google Scholar] [CrossRef]
- Jiang, Y.; Wang, T.; Shao, P.; Xu, Y.; Shao, S. Gait Study and Obstacle-Surmounting Performance Analysis of a Wheel-Leg Hybrid Robot. Acta Armamentarii 2023, 44, 247–259. [Google Scholar]
- Moore, E.; Campbell, D.; Grimminger, F.; Buehler, M. Reliable stair climbing in the simple hexapod’RHex’. In Proceedings of the Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; pp. 2222–2227. [Google Scholar]
- Tian, R.; Song, Y.; Sun, T.; Xiang, X. Parameter Design and Experiment of a Novel Wheel-legged Mobile Robot. Robot 2015, 37, 538–545. [Google Scholar]
- Jiang, N.; Yang, Z.; Sun, T. Structural design and gait planning of the wheel-legged hybrid mobile robot. J. Mach. Des. 2022, 39, 79–85. [Google Scholar]
- Kitayama, S.; Yasuda, K. A method for mixed integer programming problems by particle swarm optimization. Electr. Eng. Jpn. 2006, 157, 40–49. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Previous Works | Features | |
|---|---|---|---|
| Wheel-legged | MAMMOTH (Reid et al., 2016) |  |
|
| HyTRo-I (Lu et al., 2013) |  | ||
| TurboQuad (Chen et al., 2017) |  | ||
| ASGUARD (Eich et al., 2008) |  | ||
| Wheel-tracked | RHMBot (Luo et al., 2018) |  |
|
| NEZA-I Robot (Li et al., 2011) |  | ||
| Track-legged | TALBOT Robot (Guo et al., 2022) |  |
|
| Blade Walker (Servet et al., 2017) |  | ||
| Wheel-track-legged | WTL srobot (Zhu et al., 2016) |  |
|
| WheTLHLoc Robot (Bruzzone et al., 2021) |  | ||
| Material | Collision Rigidness N/mm | Resistance Ns/mm | Force Index | Static Translational Velocity mm/s | Frictional Translational Velocity mm/s |
|---|---|---|---|---|---|
| Nylon | 3800 | 1.52 | 2.0 | 0.1 | 10 |
| Rubber | 2855 | 0.57 | 1.1 | 0.1 | 10 |
| Acrylic | 1150 | 0.68 | 2.0 | 0.1 | 10 |
| Material | Operating Torque | Peak Torque | Climbing Capacity |
|---|---|---|---|
| Nylon | ☆☆☆ | ☆☆☆ | ☆ |
| Rubber | ☆☆ | ☆☆☆ | ☆☆☆ |
| Acrylic | ☆☆ | ☆ | ☆☆ |
| Requirements | Prototype Performance |
|---|---|
| Grassland | Undulation: 0~0.66R |
| Gritty land | Undulation: 0~1.06R |
| Slope angle | 45° |
| Transformation mode | Two modes |
| Transformation time | Less than 2 s |
| Operation | Smooth |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Liu, Y.; Yu, Z.; Guan, Y.; Zhao, Y.; Zhuang, Z.; Sun, T. Design, Analysis, and Experiment of a Wheel-Legged Mobile Robot. Appl. Sci. 2023, 13, 9936. https://doi.org/10.3390/app13179936
Li J, Liu Y, Yu Z, Guan Y, Zhao Y, Zhuang Z, Sun T. Design, Analysis, and Experiment of a Wheel-Legged Mobile Robot. Applied Sciences. 2023; 13(17):9936. https://doi.org/10.3390/app13179936
Chicago/Turabian StyleLi, Jinfu, Yongxi Liu, Ze Yu, Yuntao Guan, Yingzhuo Zhao, Zheming Zhuang, and Tao Sun. 2023. "Design, Analysis, and Experiment of a Wheel-Legged Mobile Robot" Applied Sciences 13, no. 17: 9936. https://doi.org/10.3390/app13179936
APA StyleLi, J., Liu, Y., Yu, Z., Guan, Y., Zhao, Y., Zhuang, Z., & Sun, T. (2023). Design, Analysis, and Experiment of a Wheel-Legged Mobile Robot. Applied Sciences, 13(17), 9936. https://doi.org/10.3390/app13179936