
Review of sEMG for Robot Control: Techniques and Applications


Abstract
1. Introduction
- What methods are used in each step of sEMG signal processing?
- What are the strategies and methods for robot control driven by sEMG?
- What are the advantages and disadvantages of using sEMG for robot control, the main challenges encountered, and the future development trends?
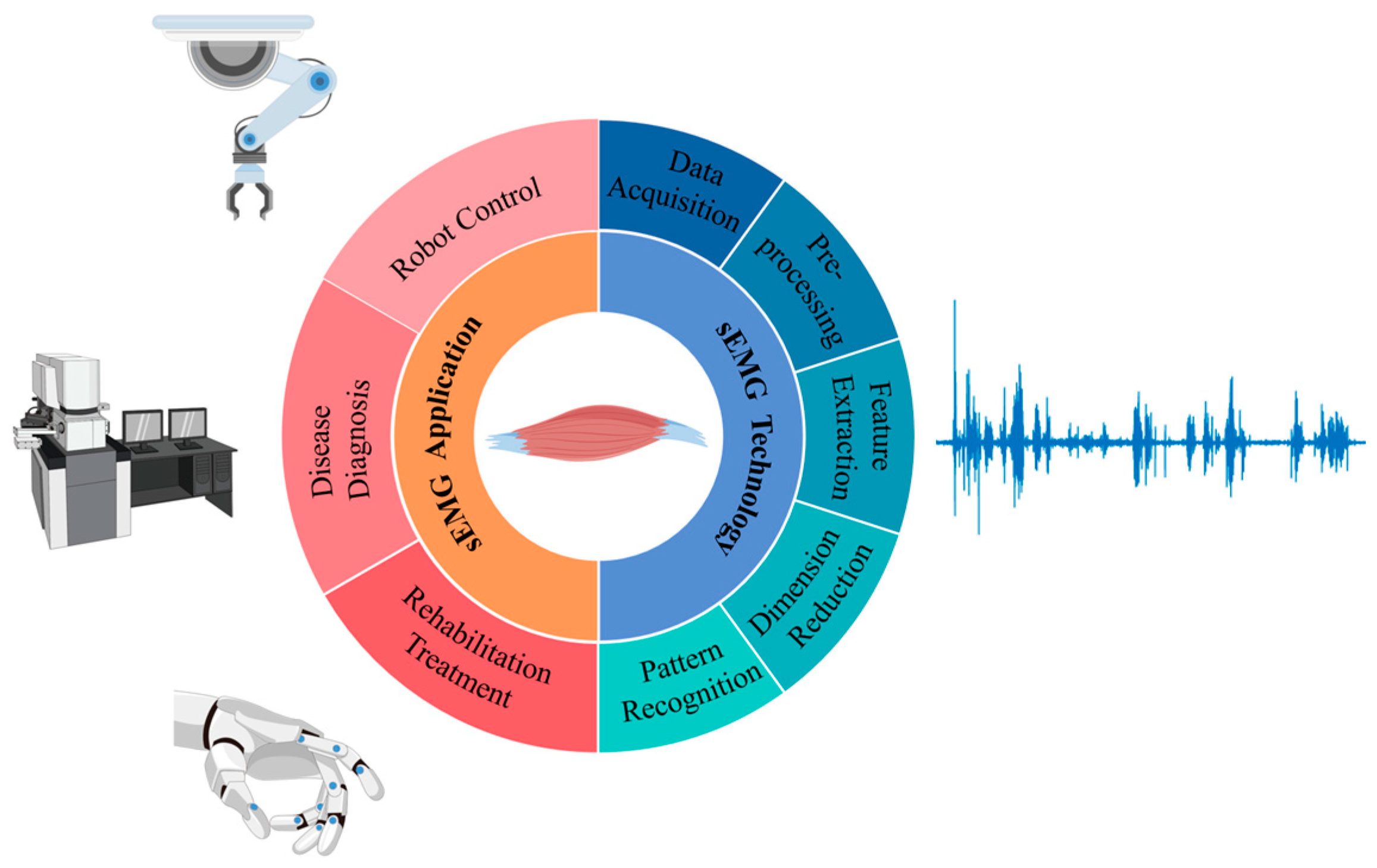
2. Methods Summary in sEMG-Based Robot Control
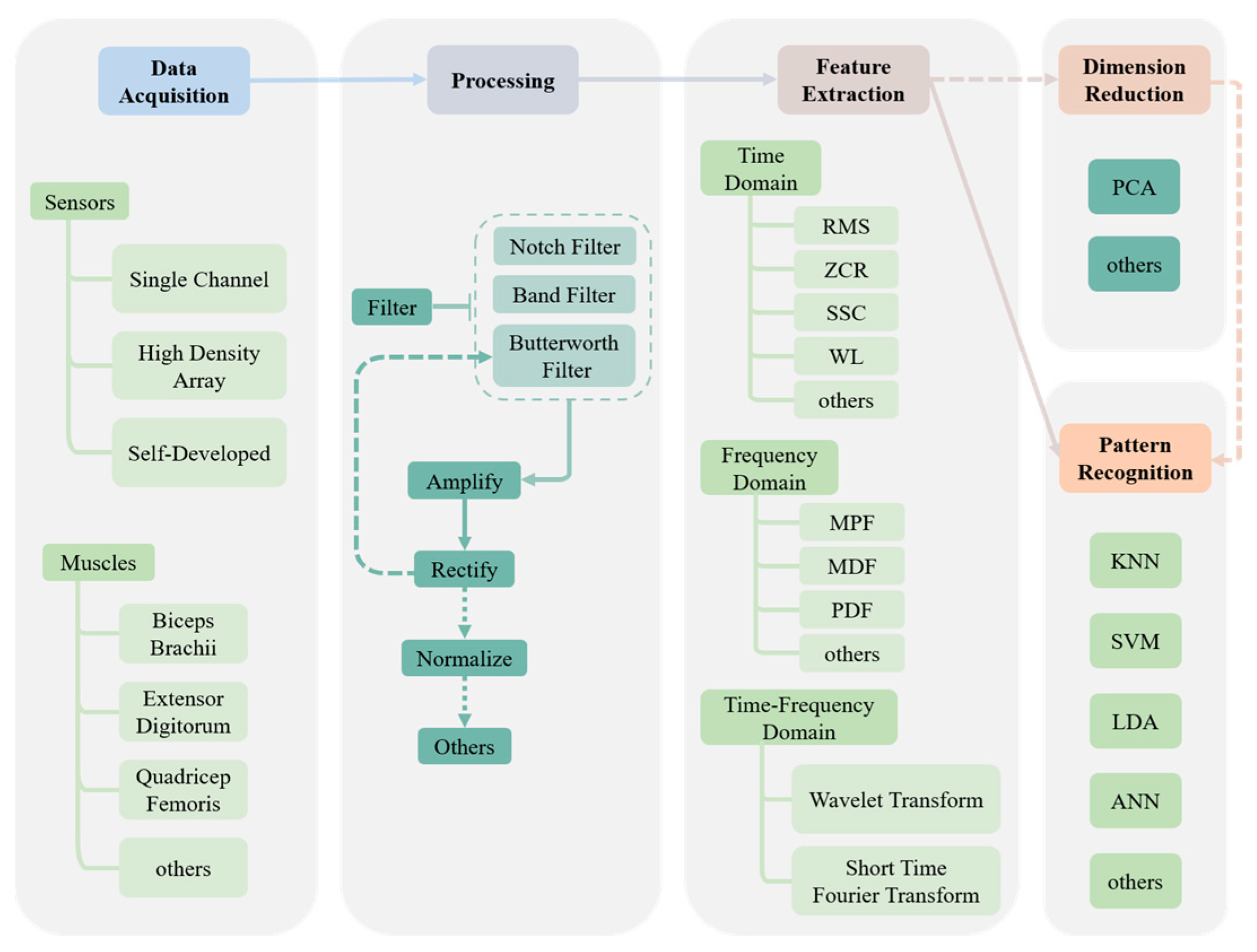
3. Processing and Pattern Recognition Methods
3.1. Data Acquisition
3.2. Pre-Processing
3.3. Feature Extraction
3.4. Pattern Recognition
3.5. Datasets
4. Application of sEMG Interface in Robot Control
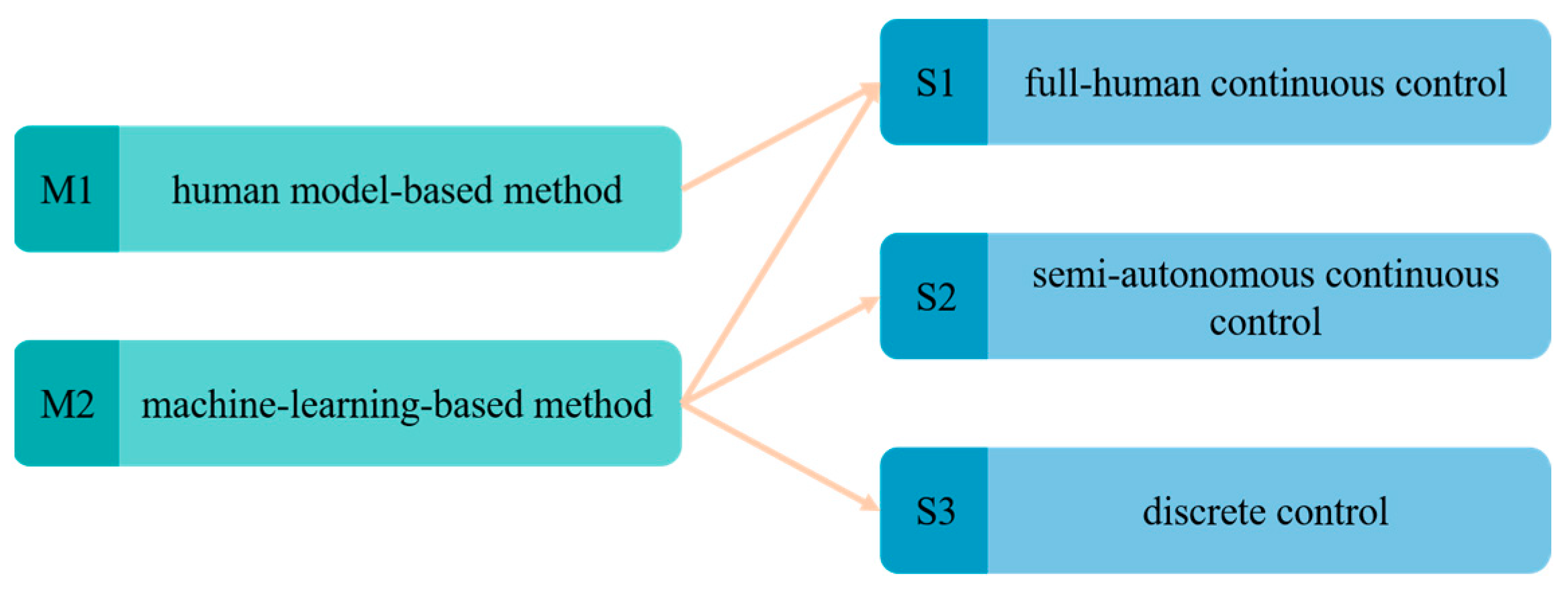
4.1. Classification of Robot Control Strategies
4.1.1. Full-Human Continuous Control Strategy (S1)
4.1.2. Semi-Autonomous Continuous Control Strategy (S2)
4.1.3. Discrete Control Strategy (S3)
4.2. Robot Control Methods Using sEMG Interfaces
5. Discussion and Future Perspectives
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Abbreviation | Complete Spelling |
| AMP | Amplitude |
| ANN | Artificial Neural Network |
| AR | Autoregressive Coefficient |
| BPNN | Back-Propagation Neural Network |
| CC | Cepstrum Coefficient |
| ConvEMG | Convolutional Electromyography |
| CRNN | Convolutional Recurrent Neural Network |
| CviT | Convolutional Vision Transformer |
| DT | Decision Tree |
| ELM | Extreme Learning Machine |
| EMD | Empirical Mode Decomposition |
| ESECW | Empirical Mode Filtering and Self-Enhancement Algorithm with Classical Wavelet |
| fApEn | Fuzzy Approximate Entropy |
| FD | Frequency Domain |
| FFT | Fast Fourier Transform |
| GRU | Gate Recurrent Unit |
| HIST | Histogram |
| IAV | Integral of Absolute Value |
| IEMG | Integrated Electromyography |
| KNN | K-Nearest Neighbor |
| LDA | Linear Discriminant Analysis |
| LDB | Local Discriminant Basis |
| LOG | Log Detector |
| LSTM | Long Short-Term Memory |
| MAV | Mean Absolute Value |
| MDF | Median Frequency |
| mDWT | Marginal Discrete Wavelet Transform |
| MEMD | Multivariate Empirical Mode Decomposition |
| MF | Mean Frequency |
| MFR | Mean Firing Rate |
| MLP | Multi-Layer Perceptron |
| MNF | Mean Frequency |
| MPF | Mean Power Frequency |
| NN | Neural Network |
| OFNDA | Orthogonal Fuzzy Neighborhood Discriminant Analysis |
| OMA | Online Moving Average |
| PCA | Principal Component Analysis |
| RF | Random Forest |
| RMS | Root Mean Square |
| RNN | Recurrent Neural Network |
| SampEn | Sample Entropy |
| SD | Standard Deviation |
| SSC | Slope Sign Change |
| SSD | Sum of Squares Difference |
| SSI | Simple Square Integral |
| STFT | Short-Time Fourier Transform |
| SUKF | Scale Unscented Kalman Filter |
| SVM | Support Vector Machine |
| SVR | Support Vector Regression |
| TD | Time Domain |
| VAR/VR | Variance |
| WL | Waveform Length |
| WPT | Wavelet Packet Transform |
| ZCR | Zero Cross Rate |
| ZC | Zero Cross |
References
- Neblett, R.; Gatchel, R.J.; Mayer, T.G. A Clinical Guide to Surface-EMG-Assisted Stretching as an Adjunct to Chronic Musculoskeletal Pain Rehabilitation. Appl. Psychophysiol. Biofeedback 2003, 28, 147–160. [Google Scholar] [CrossRef] [PubMed]
- Malosio, M.; Negri, S.P.; Pedrocchi, N.; Vicentini, F.; Caimmi, M.; Molinari Tosatti, L. A Spherical Parallel Three Degrees-of-Freedom Robot for Ankle-Foot Neuro-Rehabilitation. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; IEEE: San Diego, CA, USA, 2012; pp. 3356–3359. [Google Scholar]
- Liu, Y.; Guo, S.; Yang, Z.; Hirata, H.; Tamiya, T. A Home-Based Bilateral Rehabilitation System With SEMG-Based Real-Time Variable Stiffness. IEEE J. Biomed. Health Inform. 2021, 25, 1529–1541. [Google Scholar] [CrossRef] [PubMed]
- Meng, W.; Ding, B.; Zhou, Z.; Liu, Q.; Ai, Q. An EMG-Based Force Prediction and Control Approach for Robot-Assisted Lower Limb Rehabilitation. In Proceedings of the 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), San Diego, CA, USA, 5–8 October 2014; IEEE: San Diego, CA, USA, 2014; pp. 2198–2203. [Google Scholar]
- Khoshdel, V.; Akbarzadeh, A. An Optimized Artificial Neural Network for Human-Force Estimation: Consequences for Rehabilitation Robotics. IR 2018, 45, 416–423. [Google Scholar] [CrossRef]
- AL-Quraishi, M.S.; Ishak, A.J.; Ahmad, S.A.; Hasan, M.K.; Al-Qurishi, M.; Ghapanchizadeh, H.; Alamri, A. Classification of Ankle Joint Movements Based on Surface Electromyography Signals for Rehabilitation Robot Applications. Med. Biol. Eng. Comput. 2017, 55, 747–758. [Google Scholar] [CrossRef] [PubMed]
- Sun, R.; Song, R.; Tong, K. Complexity Analysis of EMG Signals for Patients After Stroke During Robot-Aided Rehabilitation Training Using Fuzzy Approximate Entropy. IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 1013–1019. [Google Scholar] [CrossRef]
- Stock, M.S.; Thompson, B.J. Effects of Barbell Deadlift Training on Submaximal Motor Unit Firing Rates for the Vastus Lateralis and Rectus Femoris. PLoS ONE 2014, 9, e115567. [Google Scholar] [CrossRef]
- Swanson, B.T.; Holst, B.; Infante, J.; Poenitzsch, J.; Ortiz, A. EMG Activity of Selected Rotator Cuff Musculature during Grade III Distraction and Posterior Glide Glenohumeral Mobilization: Results of a Pilot Trial Comparing Painful and Non-Painful Shoulders. J. Man. Manip. Ther. 2016, 24, 7–13. [Google Scholar] [CrossRef][Green Version]
- McCurdy, K.; Walker, J.; Yuen, D. Gluteus Maximus and Hamstring Activation During Selected Weight-Bearing Resistance Exercises. J. Strength. Cond. Res. 2018, 32, 594–601. [Google Scholar] [CrossRef]
- Hagengruber, A.; Leipscher, U.; Eskofier, B.M.; Vogel, J. Electromyography for Teleoperated Tasks in Weightlessness. IEEE Trans. Hum.-Mach. Syst. 2021, 51, 130–140. [Google Scholar] [CrossRef]
- Potvin, J.R.; Norman, R.W.; McGill, S.M. Mechanically Corrected EMG for the Continuous Estimation of Erector Spinae Muscle Loading during Repetitive Lifting. Europ. J. Appl. Physiol. 1996, 74, 119–132. [Google Scholar] [CrossRef]
- Wang, X.; Zhu, M.; Samuel, O.W.; Yang, Z.; Lu, L.; Cai, X.; Wang, X.; Chen, S.; Li, G. A Pilot Study on the Performance of Time-Domain Features in Speech Recognition Based on High-Density SEMG. In Proceedings of the 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Guadalajara, Mexico, 1–5 November 2021; IEEE: Guadalajara, Mexico, 2021; pp. 19–22. [Google Scholar]
- Trevino, M.A.; Herda, T.J.; Cooper, M.A. The Effects of Poliomyelitis on Motor Unit Behavior during Repetitive Muscle Actions: A Case Report. BMC Res. Notes 2014, 7, 611. [Google Scholar] [CrossRef]
- De Luca, C.J. The Use of Surface Electromyography in Biomechanics. J. Appl. Biomech. 1997, 13, 135–163. [Google Scholar] [CrossRef]
- Vogel, J.; Haddadin, S.; Jarosiewicz, B.; Simeral, J.D.; Bacher, D.; Hochberg, L.R.; Donoghue, J.P.; van der Smagt, P. An Assistive Decision-and-Control Architecture for Force-Sensitive Hand–Arm Systems Driven by Human–Machine Interfaces. Int. J. Robot. Res. 2015, 34, 763–780. [Google Scholar] [CrossRef]
- Nam, Y.; Koo, B.; Cichocki, A.; Choi, S. GOM-Face: GKP, EOG, and EMG-Based Multimodal Interface With Application to Humanoid Robot Control. IEEE Trans. Biomed. Eng. 2014, 61, 453–462. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y. Study on Lower Limb Exoskeleton for Rehabilitation Based on Multi-Source Information Fusion Including SEMG & Interactive Force an d Its Clinical Trail. Ph.D. Dissertation, Shanghai Jiao Tong University, Shanghai, China, 2014. [Google Scholar]
- Artemiadis, P. EMG-Based Robot Control Interfaces: Past, Present and Future. Adv. Robot. Autom. 2012, 1, 1000e107. [Google Scholar] [CrossRef]
- Lu, Z.; Chen, X.; Zhang, X.; Tong, K.-Y.; Zhou, P. Real-Time Control of an Exoskeleton Hand Robot with Myoelectric Pattern Recognition. Int. J. Neur. Syst. 2017, 27, 1750009. [Google Scholar] [CrossRef]
- Secciani, N.; Topini, A.; Ridolfi, A.; Meli, E.; Allotta, B. A Novel Point-in-Polygon-Based SEMG Classifier for Hand Exoskeleton Systems. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 3158–3166. [Google Scholar] [CrossRef]
- Li, Z.; Wang, B.; Sun, F.; Yang, C.; Xie, Q.; Zhang, W. SEMG-Based Joint Force Control for an Upper-Limb Power-Assist Exoskeleton Robot. IEEE J. Biomed. Health Inform. 2014, 18, 1043–1050. [Google Scholar] [CrossRef]
- Kiguchi, K.; Quan, Q. Muscle-Model-Oriented EMG-Based Control of an Upper-Limb Power-Assist Exoskeleton with a Neuro-Fuzzy Modifier. In Proceedings of the 2008 IEEE International Conference on Fuzzy Systems (IEEE World Congress on Computational Intelligence), Hong Kong, China, 1–6 June 2008; IEEE: Hong Kong, China, 2008; pp. 1179–1184. [Google Scholar]
- Hagengruber, A.; Vogel, J. Functional Tasks Performed by People with Severe Muscular Atrophy Using an SEMG Controlled Robotic Manipulator. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; IEEE: Honolulu, HI, USA, 2018; pp. 1713–1718. [Google Scholar]
- Vogel, J.; Hagengruber, A.; Iskandar, M.; Quere, G.; Leipscher, U.; Bustamante, S.; Dietrich, A.; Hoppner, H.; Leidner, D.; Albu-Schaffer, A. EDAN: An EMG-Controlled Daily Assistant to Help People With Physical Disabilities. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; IEEE: Las Vegas, NV, USA, 2020; pp. 4183–4190. [Google Scholar]
- Tamilselvi, R.; Merline, A.; Beham, M.P.; Anand, R.V.; Karthik, M.S.; Uthayakumar, R.H. EMG Activated Robotic Arm for Amputees. In Proceedings of the 2018 2nd International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2018; IEEE: Coimbatore, India, 2018; pp. 456–461. [Google Scholar]
- Al-Timemy, A.H.; Khushaba, R.N.; Bugmann, G.; Escudero, J. Improving the Performance Against Force Variation of EMG Controlled Multifunctional Upper-Limb Prostheses for Transradial Amputees. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 650–661. [Google Scholar] [CrossRef]
- Weitschat, R.; Dietrich, A.; Vogel, J. Online Motion Generation for Mirroring Human Arm Motion. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; IEEE: Stockholm, Sweden, 2016; pp. 4245–4250. [Google Scholar]
- Hill, A.V. The Heat of Shortening and the Dynamic Constants of Muscle. Proc. R. Soc. Lond. B 1938, 126, 136–195. [Google Scholar] [CrossRef]
- Holmes, J.W. Teaching from Classic Papers: Hill’s Model of Muscle Contraction. Adv. Physiol. Educ. 2006, 30, 67–72. [Google Scholar] [CrossRef] [PubMed]
- Morais, G.D.; Neves, L.C.; Masiero, A.A.; Castro, M.C.F. Application of Myo Armband System to Control a Robot Interface. In Proceedings of the 9th International Joint Conference on Biomedical Engineering Systems and Technologies, Rome, Italy, 21–23 February 2016; SCITEPRESS-Science and and Technology Publications: Rome, Italy, 2016; pp. 227–231. [Google Scholar]
- Atzori, M.; Gijsberts, A.; Kuzborskij, I.; Elsig, S.; Mittaz Hager, A.-G.; Deriaz, O.; Castellini, C.; Muller, H.; Caputo, B. Characterization of a Benchmark Database for Myoelectric Movement Classification. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 73–83. [Google Scholar] [CrossRef] [PubMed]
- Murillo, P.U.; Moreno, R.J.; Avilés, O. Individual Robotic Arms Manipulator Control Employing Electromyographic Signals Acquired by Myo Armbands. Int. J. Appl. Eng. Res. 2016, 11, 11241–11249. [Google Scholar]
- Cheng, J.; Chen, X.; Shen, M. A Framework for Daily Activity Monitoring and Fall Detection Based on Surface Electromyography and Accelerometer Signals. IEEE J. Biomed. Health Inform. 2013, 17, 38–45. [Google Scholar] [CrossRef] [PubMed]
- Grafakos, S.; Dimeas, F.; Aspragathos, N. Variable Admittance Control in PHRI Using EMG-Based Arm Muscles Co-Activation. In Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 9–12 October 2016; IEEE: Budapest, Hungary, 2016; pp. 001900–001905. [Google Scholar]
- Dost Sürücü, G.; Tezen, Ö. The Effect of EMG Biofeedback on Lower Extremity Functions in Hemiplegic Patients. Acta Neurol. Belg. 2021, 121, 113–118. [Google Scholar] [CrossRef]
- Vogel, J.; Hagengruber, A. An SEMG-Based Interface to Give People with Severe Muscular Atrophy Control over Assistive Devices. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; IEEE: Honolulu, HI, USA, 2018; pp. 2136–2141. [Google Scholar]
- Lu, Z.; Chen, X.; Li, Q.; Zhang, X.; Zhou, P. A Hand Gesture Recognition Framework and Wearable Gesture-Based Interaction Prototype for Mobile Devices. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 293–299. [Google Scholar] [CrossRef]
- Hao, S.; Wang, R.; Wang, Y.; Li, Y. A Spatial Attention Based Convolutional Neural Network for Gesture Recognition with HD-SEMG Signals. In Proceedings of the 2020 IEEE International Conference on E-health Networking, Application & Services (HEALTHCOM), Shenzhen, China, 1–2 March 2021; IEEE: Shenzhen, China, 2021; pp. 1–6. [Google Scholar]
- Wu, J.; Sun, L.; Jafari, R. A Wearable System for Recognizing American Sign Language in Real-Time Using IMU and Surface EMG Sensors. IEEE J. Biomed. Health Inform. 2016, 20, 1281–1290. [Google Scholar] [CrossRef]
- McManus, L.; Hu, X.; Rymer, W.Z.; Lowery, M.M.; Suresh, N.L. Changes in Motor Unit Behavior Following Isometric Fatigue of the First Dorsal Interosseous Muscle. J. Neurophysiol. 2015, 113, 3186–3196. [Google Scholar] [CrossRef] [PubMed]
- Hu, X.L.; Tong, K.Y.; Wei, X.J.; Rong, W.; Susanto, E.A.; Ho, S.K. Coordinated Upper Limb Training Assisted with an Electromyography (EMG)-Driven Hand Robot after Stroke. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; IEEE: Osaka, Japan, 2013; pp. 5903–5906. [Google Scholar]
- Cote-Allard, U.; Fall, C.L.; Drouin, A.; Campeau-Lecours, A.; Gosselin, C.; Glette, K.; Laviolette, F.; Gosselin, B. Deep Learning for Electromyographic Hand Gesture Signal Classification Using Transfer Learning. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 760–771. [Google Scholar] [CrossRef]
- Bisi, S.; De Luca, L.; Shrestha, B.; Yang, Z.; Gandhi, V. Development of an EMG-Controlled Mobile Robot. Robotics 2018, 7, 36. [Google Scholar] [CrossRef]
- Li, Z.; Zhao, X.; Liu, G.; Zhang, B.; Zhang, D.; Han, J. Electrode Shifts Estimation and Adaptive Correction for Improving Robustness of SEMG-Based Recognition. IEEE J. Biomed. Health Inform. 2021, 25, 1101–1110. [Google Scholar] [CrossRef] [PubMed]
- Mao, L.; Yin, K.; Shen, J. Evaluation of SEMG Pattern Recognition: A Preliminary Study for Prostheses. In Proceedings of the 2021 IEEE 5th Advanced Information Technology, Electronic and Automation Control Conference (IAEAC), Chongqing, China, 12–14 March 2021; IEEE: Chongqing, China, 2021; pp. 955–959. [Google Scholar]
- Suresh, N.; Li, X.; Zhou, P.; Rymer, W.Z. Examination of Motor Unit Control Properties in Stroke Survivors Using Surface EMG Decomposition: A Preliminary Report. In Proceedings of the 2011 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011; IEEE: Boston, MA, USA, 2011; pp. 8243–8246. [Google Scholar]
- Meattini, R.; Benatti, S.; Scarcia, U.; Benini, L.; Melchiorri, C. Experimental Evaluation of a SEMG-Based Human-Robot Interface for Human-like Grasping Tasks. In Proceedings of the 2015 IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; IEEE: Zhuhai, China, 2015; pp. 1030–1035. [Google Scholar]
- Zeng, J.; Zhou, Y.; Yang, Y.; Yan, J.; Liu, H. Fatigue-Sensitivity Comparison of SEMG and A-Mode Ultrasound Based Hand Gesture Recognition. IEEE J. Biomed. Health Inform. 2022, 26, 1718–1725. [Google Scholar] [CrossRef] [PubMed]
- Cene, V.; Tosin, M.; Machado, J.; Balbinot, A. Open Database for Accurate Upper-Limb Intent Detection Using Electromyography and Reliable Extreme Learning Machines. Sensors 2019, 19, 1864. [Google Scholar] [CrossRef] [PubMed]
- Hochberg, L.R.; Bacher, D.; Jarosiewicz, B.; Masse, N.Y.; Simeral, J.D.; Vogel, J.; Haddadin, S.; Liu, J.; Cash, S.S.; van der Smagt, P.; et al. Reach and Grasp by People with Tetraplegia Using a Neurally Controlled Robotic Arm. Nature 2012, 485, 372–375. [Google Scholar] [CrossRef]
- Chen, M.; Liu, H. Robot Arm Control Method Using Forearm EMG Signals. MATEC Web Conf. 2020, 309, 04007. [Google Scholar] [CrossRef]
- Khan, A.M.; Khawaja, S.G.; Akram, M.U.; Khan, A.S. SEMG Dataset of Routine Activities. Data Brief. 2020, 33, 106543. [Google Scholar] [CrossRef]
- Hassan, H.F.; Abou-Loukh, S.J.; Ibraheem, I.K. Teleoperated Robotic Arm Movement Using Electromyography Signal with Wearable Myo Armband. J. King Saud. Univ.-Eng. Sci. 2020, 32, 378–387. [Google Scholar] [CrossRef]
- Atzori, M.; Muller, H. The Ninapro Database: A Resource for SEMG Naturally Controlled Robotic Hand Prosthetics. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; IEEE: Milan, Italy, 2015; pp. 7151–7154. [Google Scholar]
- Liua, C.; Zhou, S.; Hu, S.; Wu, M. Hand Gesture Recognition Based on Semg Signal and Improved SVM Voting Method. In Proceedings of the 2020 IEEE 3rd International Conference on Information Systems and Computer Aided Education (ICISCAE), Dalian, China, 27–29 September 2020; IEEE: Dalian, China, 2020; pp. 605–608. [Google Scholar]
- Fazeli, M.; Karimi, F.; Ramezanian, V.; Jahanshahi, A.; Seyedin, S. Hand Motion Classification Using SEMG Signals Recorded from Dry and Wet Electrodes with Machine Learning. In Proceedings of the 2020 28th Iranian Conference on Electrical Engineering (ICEE), Tabriz, Iran, 4–6 August 2020; IEEE: Tabriz, Iran, 2020; pp. 1–4. [Google Scholar]
- Hameed, H.K.; Hassan, W.Z.W.; Shafie, S.; Ahmad, S.A.; Jaafar, H.; Mat, L.N.I.; Alkubaisi, Y. Identifying the Best Forearm Muscle to Control Soft Robotic Glove System by Using a Single SEMG Channel. In Proceedings of the 2020 Advances in Science and Engineering Technology International Conferences (ASET), Dubai, United Arab Emirates, 4 February–9 April 2020; IEEE: Dubai, United Arab Emirates, 2020; pp. 1–4. [Google Scholar]
- Zhang, Y.; Chen, Y.; Yu, H.; Yang, X.; Lu, W. Learning Effective Spatial–Temporal Features for SEMG Armband-Based Gesture Recognition. IEEE Internet Things J. 2020, 7, 6979–6992. [Google Scholar] [CrossRef]
- Shenoy, P.; Miller, K.J.; Crawford, B.; Rao, R.P.N. Online Electromyographic Control of a Robotic Prosthesis. IEEE Trans. Biomed. Eng. 2008, 55, 1128–1135. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, F. Research on SEMG Gesture Recognition Based on Hybrid Dilated Convolutional Neural Network Combining Bidirectional Gated Recurrent Unit And Attention Mechanism. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; IEEE: Beijing, China, 2021; pp. 3760–3763. [Google Scholar]
- Wu, C.; Yan, Y.; Cao, Q.; Fei, F.; Yang, D.; Lu, X.; Xu, B.; Zeng, H.; Song, A. SEMG Measurement Position and Feature Optimization Strategy for Gesture Recognition Based on ANOVA and Neural Networks. IEEE Access 2020, 8, 56290–56299. [Google Scholar] [CrossRef]
- Karheily, S.; Moukadem, A.; Courbot, J.-B.; Abdeslam, D.O. SEMG Time–Frequency Features for Hand Movements Classification. Expert. Syst. Appl. 2022, 210, 118282. [Google Scholar] [CrossRef]
- Chen, R.; Chen, Y.; Guo, W.; Chen, C.; Wang, Z.; Yang, Y. SEMG-Based Gesture Recognition Using GRU With Strong Robustness Against Forearm Posture. In Proceedings of the 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR), Xining, China, 15–19 July 2021; IEEE: Xining, China, 2021; pp. 275–280. [Google Scholar]
- Duan, F.; Dai, L.; Chang, W.; Chen, Z.; Zhu, C.; Li, W. SEMG-Based Identification of Hand Motion Commands Using Wavelet Neural Network Combined With Discrete Wavelet Transform. IEEE Trans. Ind. Electron. 2016, 63, 1923–1934. [Google Scholar] [CrossRef]
- Zhu, B.; Zhang, D.; Chu, Y.; Gu, Y.; Zhao, X. SeNic: An Open Source Dataset for SEMG-Based Gesture Recognition in Non-Ideal Conditions. IEEE Trans. Neural Syst. Rehabil. Eng. 2022, 30, 1252–1260. [Google Scholar] [CrossRef]
- Chen, Z.; Yang, J.; Xie, H. Surface-Electromyography-Based Gesture Recognition Using a Multistream Fusion Strategy. IEEE Access 2021, 9, 50583–50592. [Google Scholar] [CrossRef]
- Shen, C.; Pei, Z.; Chen, W.; Wang, J.; Zhang, J.; Chen, Z. Toward Generalization of SEMG-Based Pattern Recognition: A Novel Feature Extraction for Gesture Recognition. IEEE Trans. Instrum. Meas. 2022, 71, 1–12. [Google Scholar] [CrossRef]
- Santiago, J.L.L.; Rios, P.; Arrustico, D.; Cortez, L. Volitional PD Computed Torque Control Design of a 2-DOF Finger Model for Cylindrical Grip Movement Assistance with SEMG Signal Classification. In Proceedings of the 2021 IEEE Engineering International Research Conference (EIRCON), Lima, Peru, 27–29 October 2021; IEEE: Lima, Peru, 2021; pp. 1–4. [Google Scholar]
- Zhang, X.; Chen, X.; Zhao, Z.; Li, Q.; Yang, J.; Lantz, V.; Wang, K. An Adaptive Feature Extractor for Gesture SEMG Recognition. In Medical Biometrics; Zhang, D., Ed.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2007; Volume 4901, pp. 83–90. ISBN 978-3-540-77410-5. [Google Scholar]
- Kim, S.; Kim, M.; Lee, J.; Park, J. Robot Hand Synergy Mapping Using Multi-Factor Model and EMG Signal. In Experimental Robotics; Hsieh, M.A., Khatib, O., Kumar, V., Eds.; Springer Tracts in Advanced Robotics; Springer International Publishing: Cham, Switzerland, 2016; Volume 109, pp. 671–683. ISBN 978-3-319-23777-0. [Google Scholar]
- Du, Y.; Jin, W.; Wei, W.; Hu, Y.; Geng, W. Surface EMG-Based Inter-Session Gesture Recognition Enhanced by Deep Domain Adaptation. Sensors 2017, 17, 458. [Google Scholar] [CrossRef]
- Jarque-Bou, N.J.; Vergara, M.; Sancho-Bru, J.L.; Gracia-Ibáñez, V.; Roda-Sales, A. A Calibrated Database of Kinematics and EMG of the Forearm and Hand during Activities of Daily Living. Sci. Data 2019, 6, 270. [Google Scholar] [CrossRef]
- Liu, B. Upper Limb Rehabilitation Training and Evaluation System Based on EEG and EMG Signals. Ph.D. Thesis, Zhengzhou University, Zhengzhou, China, 2020. [Google Scholar]
- Li, Z. Parameterization of Human Upper Limb Movement Pattern and Its Application in Rehabilitation Robot. Ph.D. Thesis, Xinjiang University, Xinjiang, China, 2020. [Google Scholar]
- Gopura, R.A.R.C.; Kiguchi, K. A Human Forearm and Wrist Motion Assist Exoskeleton Robot with EMG-Based Fuzzy-Neuro Control. In Proceedings of the 2008 2nd IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics, Scottsdale, AZ, USA, 19–22 October 2008; IEEE: Scottsdale, AZ, USA, 2008; pp. 550–555. [Google Scholar]
- He, X.; Hao, M.; Wei, M.; Xiao, Q.; Lan, N. A Novel Experimental Method to Evaluate Motor Task Control in Parkinson’s Patients. In Proceedings of the 2013 35th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Osaka, Japan, 3–7 July 2013; IEEE: Osaka, Japan, 2013; pp. 6587–6590. [Google Scholar]
- Maeda, Y.; Ishibashi, S. Operating Instruction Method Based on EMG for Omnidirectional Wheelchair Robot. In Proceedings of the 2017 Joint 17th World Congress of International Fuzzy Systems Association and 9th International Conference on Soft Computing and Intelligent Systems (IFSA-SCIS), Otsu, Japan, 27–30 June 2017; IEEE: Otsu, Japan, 2017; pp. 1–5. [Google Scholar]
- Bu, D.; Guo, S.; Li, H. SEMG-Based Motion Recognition of Upper Limb Rehabilitation Using the Improved Yolo-v4 Algorithm. Life 2022, 12, 64. [Google Scholar] [CrossRef]
- Roy, S.H.; Cheng, M.S.; Chang, S.-S.; Moore, J.; De Luca, G.; Nawab, S.H.; De Luca, C.J. A Combined SEMG and Accelerometer System for Monitoring Functional Activity in Stroke. IEEE Trans. Neural Syst. Rehabil. Eng. 2009, 17, 585–594. [Google Scholar] [CrossRef]
- Ding, Q.; Zhao, X.; Xiong, A.; Han, J. A Novel Motion Estimate Method of Human Joint with EMG-Driven Model. In Proceedings of the 2011 5th International Conference on Bioinformatics and Biomedical Engineering, Wuhan, China, 13–15 May 2011; IEEE: Wuhan, China, 2011; pp. 1–5. [Google Scholar]
- Artemiadis, P.K.; Kyriakopoulos, K.J. An EMG-Based Robot Control Scheme Robust to Time-Varying EMG Signal Features. IEEE Trans. Inform. Technol. Biomed. 2010, 14, 582–588. [Google Scholar] [CrossRef]
- Vogel, J.; Bayer, J.; van der Smagt, P. Continuous Robot Control Using Surface Electromyography of Atrophic Muscles. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Tokyo, Japan, 2013; pp. 845–850. [Google Scholar]
- Stillfried, G.; Stepper, J.; Neppl, H.; Vogel, J.; Höppner, H. Elastic Elements in a Wrist Prosthesis for Drumming Reduce Muscular Effort, but Increase Imprecision and Perceived Stress. Front. Neurorobot. 2018, 12, 9. [Google Scholar] [CrossRef] [PubMed]
- Abayasiri, R.A.M.; Jayasekara, A.G.B.P.; Gopura, R.A.R.C.; Kiguchi, K. EMG Based Controller for a Wheelchair with Robotic Manipulator. In Proceedings of the 2021 3rd International Conference on Electrical Engineering (EECon), Colombo, Sri Lanka, 24 September 2021; IEEE: Colombo, Sri Lanka, 2021; pp. 125–130. [Google Scholar]
- Artemiadis, P.K.; Kyriakopoulos, K.J. EMG-Based Control of a Robot Arm Using Low-Dimensional Embeddings. IEEE Trans. Robot. 2010, 26, 393–398. [Google Scholar] [CrossRef]
- Kiguchi, K.; Imada, Y.; Liyanage, M. EMG-Based Neuro-Fuzzy Control of a 4DOF Upper-Limb Power-Assist Exoskeleton. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; IEEE: Lyon, France, 2007; pp. 3040–3043. [Google Scholar]
- Artemiadis, P.K.; Kyriakopoulos, K.J. Estimating Arm Motion and Force Using EMG Signals: On the Control of Exoskeletons. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Nice, France, 2008; pp. 279–284. [Google Scholar]
- Rojas-Martínez, M.; Serna, L.Y.; Jordanic, M.; Marateb, H.R.; Merletti, R.; Mañanas, M.Á. High-Density Surface Electromyography Signals during Isometric Contractions of Elbow Muscles of Healthy Humans. Sci. Data 2020, 7, 397. [Google Scholar] [CrossRef]
- Rojas-Martínez, M.; Mañanas, M.A.; Alonso, J.F. High-Density Surface EMG Maps from Upper-Arm and Forearm Muscles. J. Neuroeng. Rehabil. 2012, 9, 85. [Google Scholar] [CrossRef] [PubMed]
- Kiguchi, K. A Study on EMG-Based Human Motion Prediction for Power Assist Exoskeletons. In Proceedings of the 2007 International Symposium on Computational Intelligence in Robotics and Automation, Jacksonville, FL, USA, 20–22 June 2007; IEEE: Jacksonville, FL, USA, 2007; pp. 190–195. [Google Scholar]
- De Baets, L.; Jaspers, E.; Janssens, L.; Van Deun, S. Characteristics of Neuromuscular Control of the Scapula after Stroke: A First Exploration. Front. Hum. Neurosci. 2014, 8, 933. [Google Scholar] [CrossRef] [PubMed]
- Kiguchi, K.; Tanaka, T.; Fukuda, T. Neuro-Fuzzy Control of a Robotic Exoskeleton With EMG Signals. IEEE Trans. Fuzzy Syst. 2004, 12, 481–490. [Google Scholar] [CrossRef]
- Lin, M.-W.; Ruan, S.-J.; Tu, Y.-W. A 3DCNN-LSTM Hybrid Framework for SEMG-Based Noises Recognition in Exercise. IEEE Access 2020, 8, 162982–162988. [Google Scholar] [CrossRef]
- Luo, R.; Sun, S.; Zhang, X.; Tang, Z.; Wang, W. A Low-Cost End-to-End SEMG-Based Gait Sub-Phase Recognition System. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 267–276. [Google Scholar] [CrossRef]
- Li, C.; He, H.; Yin, S.; Deng, H.; Zhu, Y. Continuous Angle Prediction of Lower Limb Knee Joint Based on SEMG. In Proceedings of the 2021 IEEE International Conference on Recent Advances in Systems Science and Engineering (RASSE), Shanghai, China, 12–14 December 2021; IEEE: Shanghai, China, 2021; pp. 1–6. [Google Scholar]
- Cai, C.; Yao, L.; Wei, X. ESECW Method to Process SEMG and Its Application in Gait Recognition. In Proceedings of the 2021 6th International Conference on Intelligent Computing and Signal Processing (ICSP), Xi’an, China, 9–11 April 2021; IEEE: Xi’an, China, 2021; pp. 525–528. [Google Scholar]
- Khanjani, I.; Khoshdel, V.; Akbarzadeh, A. Estimate Human-Force from SEMG Signals for a Lower-Limb Rehabilitation Robot. In Proceedings of the 2017 Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017; IEEE: Tehran, Iran, 2017; pp. 132–136. [Google Scholar]
- Shi, X.; Qin, P.; Zhu, J.; Zhai, M.; Shi, W. Feature Extraction and Classification of Lower Limb Motion Based on SEMG Signals. IEEE Access 2020, 8, 132882–132892. [Google Scholar] [CrossRef]
- De Luca, C.J.; Kuznetsov, M.; Gilmore, L.D.; Roy, S.H. Inter-Electrode Spacing of Surface EMG Sensors: Reduction of Crosstalk Contamination during Voluntary Contractions. J. Biomech. 2012, 45, 555–561. [Google Scholar] [CrossRef]
- Stock, M.S.; Beck, T.W.; Defreitas, J.M. Effects of Fatigue on Motor Unit Firing Rate versus Recruitment Threshold Relationships: Motor Unit Fatigue. Muscle Nerve 2012, 45, 100–109. [Google Scholar] [CrossRef]
- Roy, S.H.; De Luca, G.; Cheng, M.S.; Johansson, A.; Gilmore, L.D.; De Luca, C.J. Electro-Mechanical Stability of Surface EMG Sensors. Med. Bio Eng. Comput. 2007, 45, 447–457. [Google Scholar] [CrossRef]
- De Luca, C.J.; Donald Gilmore, L.; Kuznetsov, M.; Roy, S.H. Filtering the Surface EMG Signal: Movement Artifact and Baseline Noise Contamination. J. Biomech. 2010, 43, 1573–1579. [Google Scholar] [CrossRef] [PubMed]
- De Luca, C.J.; Merletti, R. Surface Myoelectric Signal Cross-Talk among Muscles of the Leg. Electroencephalogr. Clin. Neurophysiol. 1988, 69, 568–575. [Google Scholar] [CrossRef] [PubMed]
- Beck, T.W.; DeFreitas, J.M.; Stock, M.S. The Effects of a Resistance Training Program on Average Motor Unit Firing Rates. Clin. Kinesiol. 2011, 9. [Google Scholar]
- Nawab, S.H.; Chang, S.-S.; De Luca, C.J. High-Yield Decomposition of Surface EMG Signals. Clin. Neurophysiol. 2010, 121, 1602–1615. [Google Scholar] [CrossRef] [PubMed]
- Zaheer, F.; Roy, S.H.; De Luca, C.J. Preferred Sensor Sites for Surface EMG Signal Decomposition. Physiol. Meas. 2012, 33, 195–206. [Google Scholar] [CrossRef]
- Beck, T.W.; Kasishke, P.R.; Stock, M.S.; DeFreitas, J.M. Eccentric Exercise Does Not Affect Common Drive in the Biceps Brachii: Muscle Damage and Common Drive. Muscle Nerve 2012, 46, 759–766. [Google Scholar] [CrossRef]
- Defreitas, J.M.; Beck, T.W.; Ye, X.; Stock, M.S. Synchronization of Low- and High-Threshold Motor Units: Synchronization of Low- and High-Threshold Motor Units. Muscle Nerve 2014, 49, 575–583. [Google Scholar] [CrossRef]
- Roy, S.H.; De Luca, C.J.; Schneider, J. Effects of Electrode Location on Myoelectric Conduction Velocity and Median Frequency Estimates. J. Appl. Physiol. 1986, 61, 1510–1517. [Google Scholar] [CrossRef]
- Kline, J.C.; De Luca, C.J. Error Reduction in EMG Signal Decomposition. J. Neurophysiol. 2014, 112, 2718–2728. [Google Scholar] [CrossRef]
- Kuan, J.-Y.; Huang, T.-H.; Huang, H.-P. Human Intention Estimation Method for a New Compliant Rehabilitation and Assistive Robot. In Proceedings of the SICE Annual Conference 2010, Taipei, Taiwan, 18–21 August 2010; pp. 2348–2353. [Google Scholar]
- Schiel, F.; Hagengruber, A.; Vogel, J.; Triebel, R. Incremental Learning of EMG-Based Control Commands Using Gaussian Processes. In Proceedings of the 2020 Conference on Robot Learning, Virtual, 16–18 November 2020; pp. 1137–1146. [Google Scholar]
- Al-Faiz, M.Z.; Miry, A.H. Artificial Human Arm Driven by EMG Signal. In MATLAB—A Fundamental Tool for Scientific Computing and Engineering Applications—Volume 1; Katsikis, V., Ed.; IntechOpen: London, UK, 2012; ISBN 978-953-51-0750-7. [Google Scholar]
- Al-Timemy, A.H.; Bugmann, G.; Escudero, J.; Outram, N. Classification of Finger Movements for the Dexterous Hand Prosthesis Control With Surface Electromyography. IEEE J. Biomed. Health Inform. 2013, 17, 608–618. [Google Scholar] [CrossRef] [PubMed]
- Phinyomark, A.; Quaine, F.; Charbonnier, S.; Serviere, C.; Tarpin-Bernard, F.; Laurillau, Y. EMG Feature Evaluation for Improving Myoelectric Pattern Recognition Robustness. Expert. Syst. Appl. 2013, 40, 4832–4840. [Google Scholar] [CrossRef]
- Kiguchi, K.; Tamura, K.; Hayashi, Y. Estimation of Joint Force/Torque Based on EMG Signals. In Proceedings of the 2013 IEEE Workshop on Robotic Intelligence in Informationally Structured Space (RiiSS), Singapore, 16–19 April 2013; IEEE: Singapore, 2013; pp. 20–24. [Google Scholar]
- Wang, J.-Y.; Dai, Y.-H.; Si, X.-X. Feature Layer Fusion of Linear Features and Empirical Mode Decomposition of Human EMG Signal. J. Electron. Sci. Technol. 2022, 20, 100169. [Google Scholar] [CrossRef]
- Shen, S.; Wang, X.; Mao, F.; Sun, L.; Gu, M. Movements Classification Through SEMG With Convolutional Vision Transformer and Stacking Ensemble Learning. IEEE Sens. J. 2022, 22, 13318–13325. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, P. Sample Entropy Analysis of Surface EMG for Improved Muscle Activity Onset Detection against Spurious Background Spikes. J. Electromyogr. Kinesiol. 2012, 22, 901–907. [Google Scholar] [CrossRef]
- Hudgins, B.; Parker, P.; Scott, R.N. A New Strategy for Multifunction Myoelectric Control. IEEE Trans. Biomed. Eng. 1993, 40, 82–94. [Google Scholar] [CrossRef]
- Farrell, T.R.; Weir, R.F. The Optimal Controller Delay for Myoelectric Prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 111–118. [Google Scholar] [CrossRef]
- Smith, L.H.; Hargrove, L.J.; Lock, B.A.; Kuiken, T.A. Determining the Optimal Window Length for Pattern Recognition-Based Myoelectric Control: Balancing the Competing Effects of Classification Error and Controller Delay. IEEE Trans. Neural Syst. Rehabil. Eng. 2011, 19, 186–192. [Google Scholar] [CrossRef]
- Rahimian, E.; Zabihi, S.; Atashzar, S.F.; Asif, A.; Mohammadi, A. XceptionTime: A Novel Deep Architecture Based on Depthwise Separable Convolutions for Hand Gesture Classification. arXiv 2019, arXiv:1911.03803. [Google Scholar]
- Atzori, M.; Gijsberts, A.; Castellini, C.; Caputo, B.; Hager, A.-G.M.; Elsig, S.; Giatsidis, G.; Bassetto, F.; Müller, H. Electromyography Data for Non-Invasive Naturally-Controlled Robotic Hand Prostheses. Sci. Data 2014, 1, 140053. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Huang, Z.; He, W.; Su, C.-Y. Adaptive Impedance Control for an Upper Limb Robotic Exoskeleton Using Biological Signals. IEEE Trans. Ind. Electron. 2017, 64, 1664–1674. [Google Scholar] [CrossRef]
- Minati, L.; Yoshimura, N.; Koike, Y. Hybrid Control of a Vision-Guided Robot Arm by EOG, EMG, EEG Biosignals and Head Movement Acquired via a Consumer-Grade Wearable Device. IEEE Access 2016, 4, 9528–9541. [Google Scholar] [CrossRef]
- Jain, R.K.; Datta, S.; Majumder, S. Biomimetic Behavior of IPMC Using EMG Signal for Micro Robot. Mech. Based Des. Struct. Mach. 2014, 42, 398–417. [Google Scholar] [CrossRef]
- Gowtham, S.; Krishna, K.M.A.; Srinivas, T.; Raj, R.G.P.; Joshuva, A. EMG-Based Control of a 5 DOF Robotic Manipulator. In Proceedings of the 2020 International Conference on Wireless Communications Signal Processing and Networking (WiSPNET), Chennai, India, 4–6 August 2020; IEEE: Chennai, India, 2020; pp. 52–57. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Body Part | Joint | Muscles | References |
|---|---|---|---|
| Upper-limb | Hand gestures | flexor carpi radialis flexor carpi ulnaris flexor digitorum superficialis flexor digitorum profundus extensor digitorum first dorsal interosseous hypothenar extensor digiti minimi long palmar supinator abductor pollicis brevis | [6,31,33,37,38,39,40,41,42,43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69,70,71,72] |
| Wrist | flexor carpi radialis extensor carpi radialis flexor carpi ulnaris extensor carpi ulnaris pronator teres extensor digitorum flexor digitorum | [16,22,24,37,38,73,74,75,76,77,78,79] | |
| Elbow | biceps brachii triceps brachii flexor carpi radialis extensor carpi radialis flexor carpi ulnaris extensor carpi ulnaris flexor digitorum superficialis brachioradialis brachialis anconeus pronator teres supinator extensor digitorum | [3,7,11,16,22,23,24,25,37,70,77,80,81,82,83,84,85,86,87,88,89,90,91] | |
| Shoulder | biceps brachii deltoid pectoralis major supraspinatus trapezius teres major teres minor infraspinatus latissimus dorsi | [9,22,23,37,75,80,82,84,86,87,88,91,92,93] | |
| Lower-limb | Hip | gluteus maximus hamstring | [10] |
| Knee | quadriceps femoris hamstring gastrocnemius anterior tibial | [5,34,80,94,95,96,97,98,99] | |
| Ankle | gastrocnemius anterior tibial peroneus longus extensor digitorum longus peroneus brevis | [2,4,6,34,100] | |
| Other parts | Face | masseter muscle | [13] |
| Abdomen | rectus abdominis | [80] | |
| Back | erector spinalis | [12,80] |
| Reference | Pre-Processing * | Feature Sets ** | Classifiers ** | Publish Time |
|---|---|---|---|---|
| [4] | 1-2-5 | RMS, MAV | SVR | 2014 |
| [6] | 2 | logarithmic transferred time-domain features, traditional time-domain features | LDA, KNN, NaiveBayes | 2017 |
| [7] | 1-2 | fApEn | - | 2014 |
| [11] | - | WL, SSC, ZCR, AMP | Gauss Process | 2021 |
| [14] | 2 | RMS, MFR, MPF | - | 2014 |
| [18] | - | STFT, WPT | - | 2014 |
| [22] | - | RMS | Fuzzy, NN | 2012 |
| [24] | - | AMP, SSC, ZCR, WL | LDA | 2018 |
| [26] | 2-5 | MPF, MDF | - | 2018 |
| [27] | - | self-defined features | LDA, NaiveBayes, RF, KNN | 2016 |
| [32] | 2-3-6 | MAV, VAR, WL, HIST, CC, mDWT | MLP(ANN), SVM | 2015 |
| [37] | - | AMP, SSC, ZCR, WL | Gauss Process | 2018 |
| [38] | 1-2 | MAV, AR | Improved dynamic time-warping algorithm | 2014 |
| [40] | 2 | MAV, Reflection Coefficients, Histogram, RMS, Autoregressive coefficient, Variance, Willison amplitude, Modified Median Frequency, Modified Mean Frequency | DT, SVM, NN, NaiveBayes | 2016 |
| [43] | - | 1-Time Domain 2-Enhanced Time Domain 3-NinaPro Features 4-SampEn, CC, RMS, WL | SVM, ANN, RF, KNN, LDA | 2019 |
| [44] | 8 | IEMG, MAV, SSI, RMS, LOG, VAR | KNN | 2018 |
| [46] | 2 | MAV, VAR, SSC, WL, MNF | Linear SVM | 2021 |
| [49] | - | MAV, ZC, SSC, WL, AR | LDA | 2022 |
| [50] | 9 | RMS, VAR, MAV, SD | ELM | 2019 |
| [51] | 2 | RMS, AR, WL, ZC | Linear Bayes | 2017 |
| [52] | 1-2-3-5 | RMS, WL, ZC, MNF, AR | SVM | 2020 |
| [54] | - | MAV, WL, RMS, AR, ZC, SSC | SVM, LDA, KNN | 2019 |
| [55] | - | RMS, MMAV, MMAVTP, MPF | SVM | 2020 |
| [57] | 2-5 | MAV, WL, ZC, SSC | SVM | 2020 |
| [59] | - | Spatiotemporal characteristics | MEMD, CRNN | 2020 |
| [60] | 5-9 | RMS | SVM | 2008 |
| [62] | 2 | VAR, ZC, iEMG, WAMP | - | 2020 |
| [64] | - | RMS | GRU-RNN | 2021 |
| [67] | 3-6 | - | ConvEMG, LSTM | 2021 |
| [68] | 2 | TDD-FT, SSD | - | 2022 |
| [69] | 3 | - | RF, SVM | 2021 |
| [70] | 12 | WPT | LDB | 2007 |
| [74] | 9 | MAV, ZC, SSC, WL, RMS | SVM | 2020 |
| [75] | 5-9 | WPT | SVM, BPNN | 2020 |
| [76] | 3-5-8-9 | RMS, bursting initial time, bursting duration, bursting area, and the maximum value | - | 2013 |
| [80] | 3 | RMS, Autocovariance function | NN, Fuzzy | 2009 |
| [81] | 3-4-6-7 | IAV, WL | - | 2011 |
| [82] | 3-6-7 | IAV, ZC, VAR, MDF | - | 2010 |
| [87] | - | RMS | Fuzzy, NN | 2007 |
| [93] | - | MAV | Fuzzy, NN | 2004 |
| [94] | 2 | STFT | - | 2020 |
| [95] | - | RMS, iEMG | LSTM, MLP | 2020 |
| [96] | 2 | RMS, WL, VR | - | 2021 |
| [97] | - | RMS, WL, SSI, MAV, VAR, LOG, SampEn | ESECW | 2021 |
| [98] | 5-6-9 | OMA self-defined features | ANN | 2017 |
| [99] | - | WPT-PCA | SUKF, NN | 2020 |
| [112] | 2-5-9 | - | Linear regression, SVM | 2010 |
| [113] | 9 | AMP, SSC, ZCR, WL | - | 2020 |
| [114] | - | iEMG, MAV, MMAV, VAR, WL, WAMP | KNN | 2012 |
| [115] | 1-3-4-5 | RMS, WL, ZC, IAV, SSC, AR | PCA, LDA; PCA, SVM; OFNDA, LDA; OFNDA, SVM | 2013 |
| [116] | - | SampEn, CC, RMS, WL | - | 2013 |
| [117] | - | RMS | Fuzzy, NN | 2013 |
| [118] | - | TD-VAR, RMS; FD-MF, MPF; EMD | The series splicing method Complex vector method | 2022 |
| [119] | - | FFT | CviT | 2022 |
| [120] | - | SampEn | - | 2012 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, T.; Yan, Z.; Guo, S.; Li, Y.; Li, X.; Xi, F. Review of sEMG for Robot Control: Techniques and Applications. Appl. Sci. 2023, 13, 9546. https://doi.org/10.3390/app13179546
Song T, Yan Z, Guo S, Li Y, Li X, Xi F. Review of sEMG for Robot Control: Techniques and Applications. Applied Sciences. 2023; 13(17):9546. https://doi.org/10.3390/app13179546
Chicago/Turabian StyleSong, Tao, Zhe Yan, Shuai Guo, Yuwen Li, Xianhua Li, and Fengfeng Xi. 2023. "Review of sEMG for Robot Control: Techniques and Applications" Applied Sciences 13, no. 17: 9546. https://doi.org/10.3390/app13179546
APA StyleSong, T., Yan, Z., Guo, S., Li, Y., Li, X., & Xi, F. (2023). Review of sEMG for Robot Control: Techniques and Applications. Applied Sciences, 13(17), 9546. https://doi.org/10.3390/app13179546