
LoRaWAPS: A Wide-Area Positioning System Based on LoRa Mesh



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
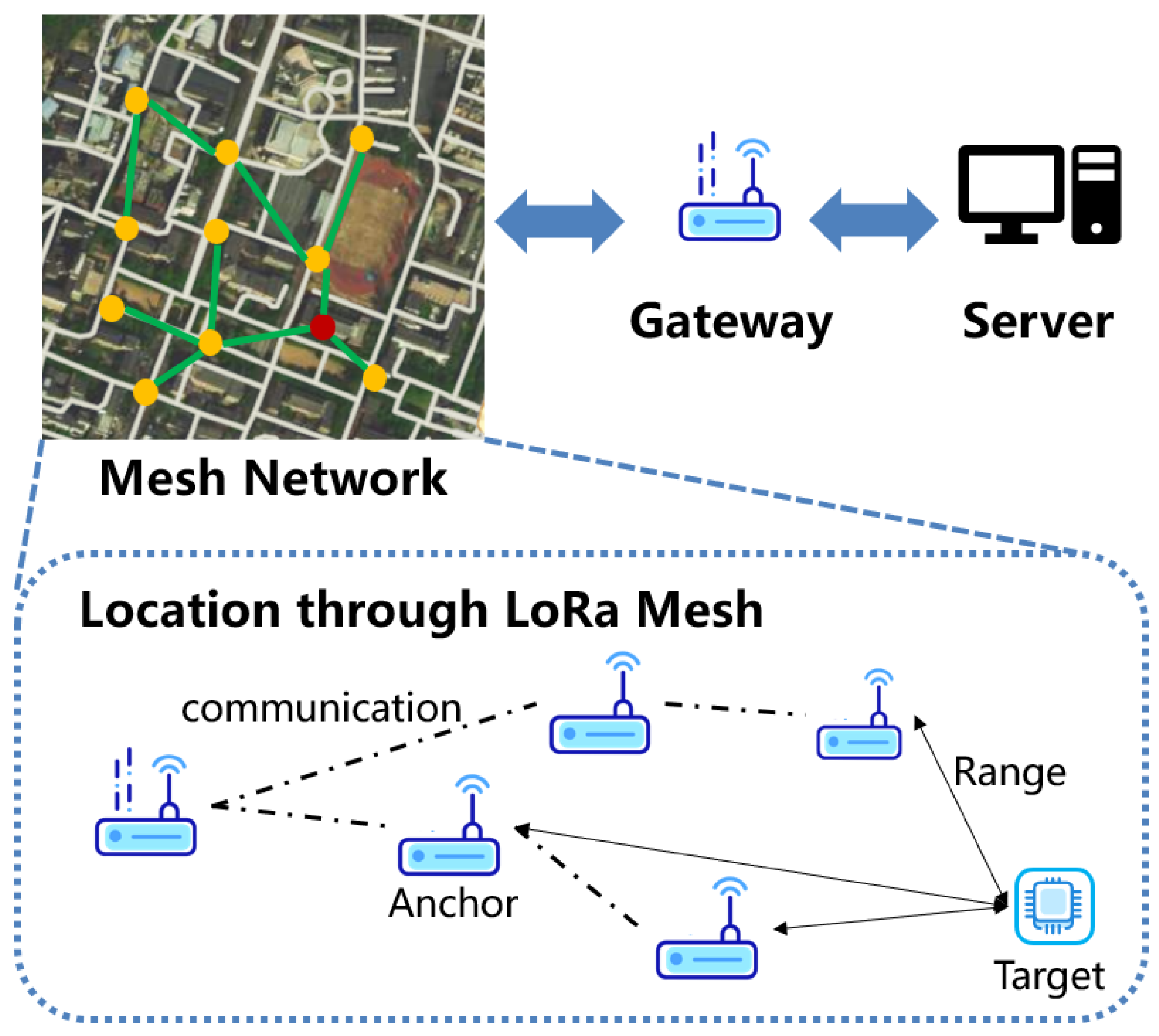
- A wide area localization method and system based on LoRa Mesh are designed. In view of the limited radio frequency (RF) channel of LoRa hardware and the difficulty that positioning tasks and communication tasks preempt time-frequency resources, the system realizes the coexistence of communication and positioning functions by optimizing the system logic. On this basis, a demonstrable LoRa communication-positioning sensing system is built through software and hardware design. To the best of our knowledge, this is the first system capable of simultaneously running LoRa Mesh networking communication and LoRa wireless positioning tasks.
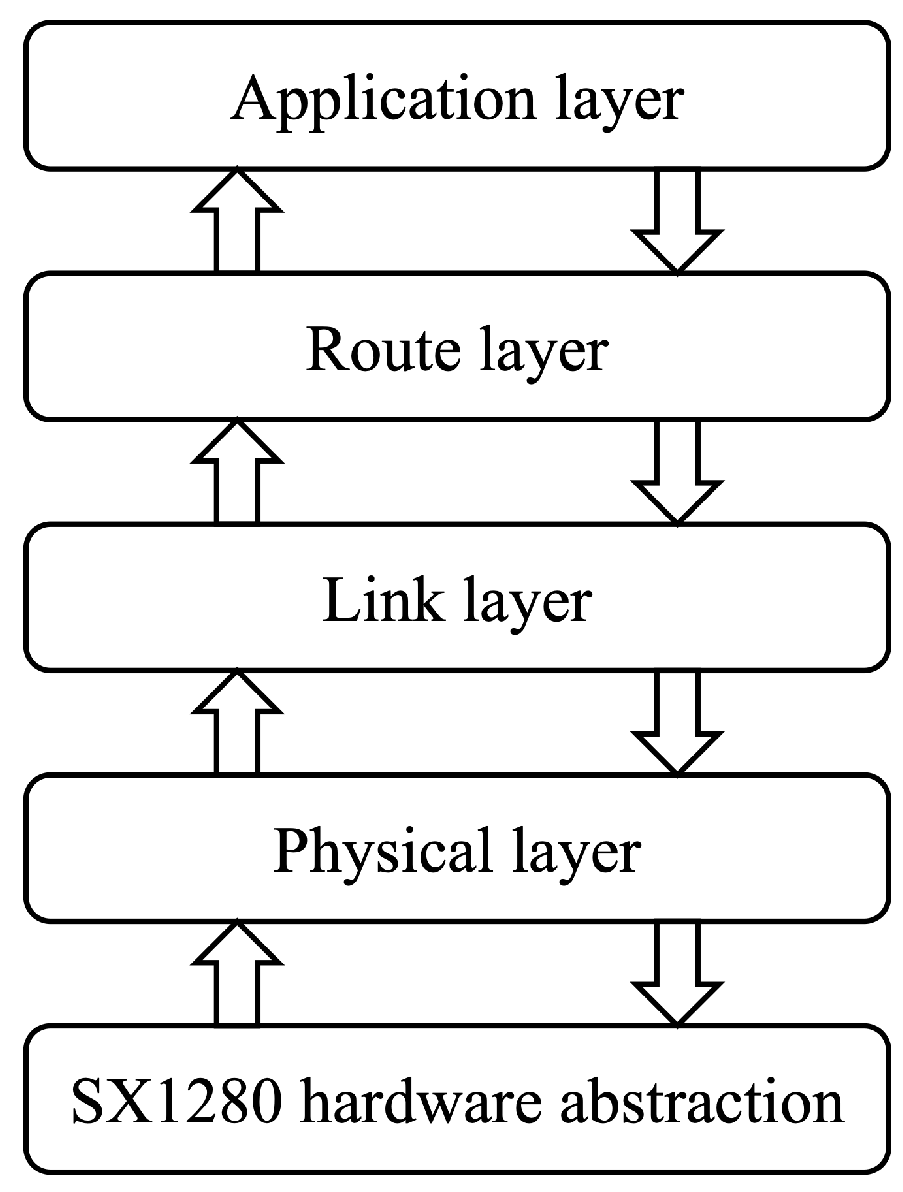
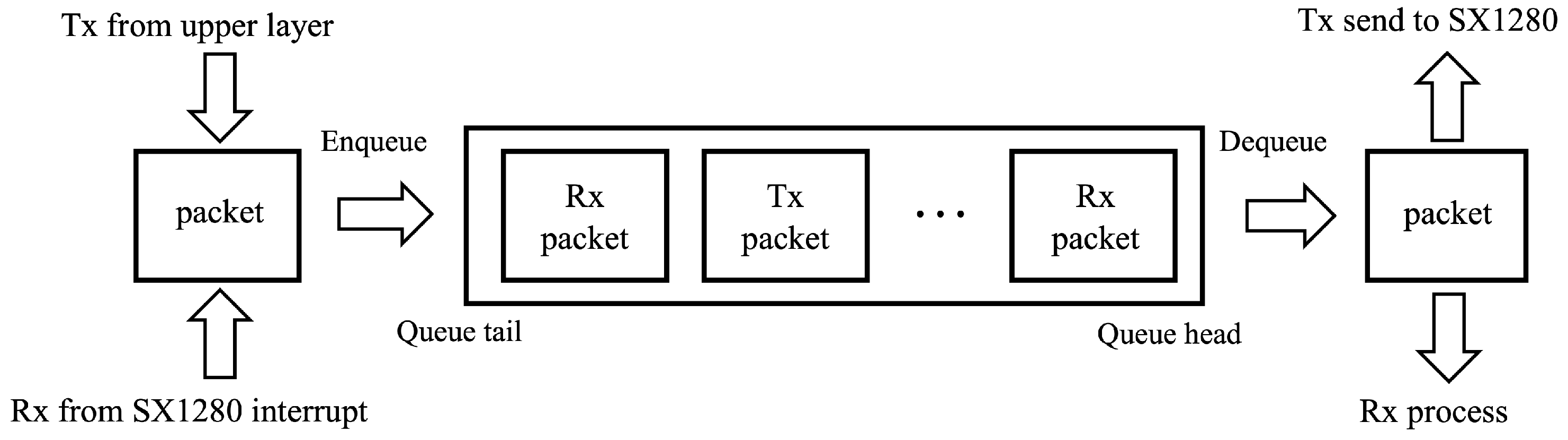
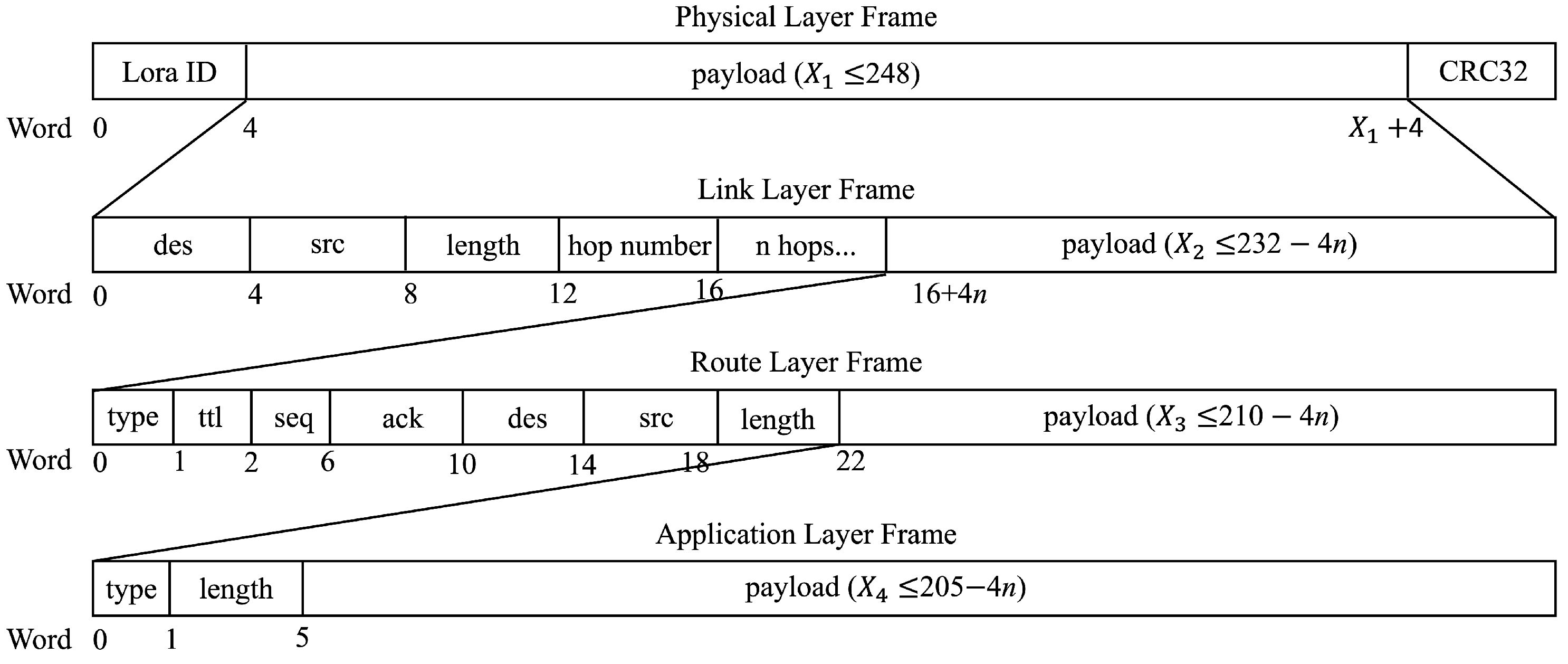
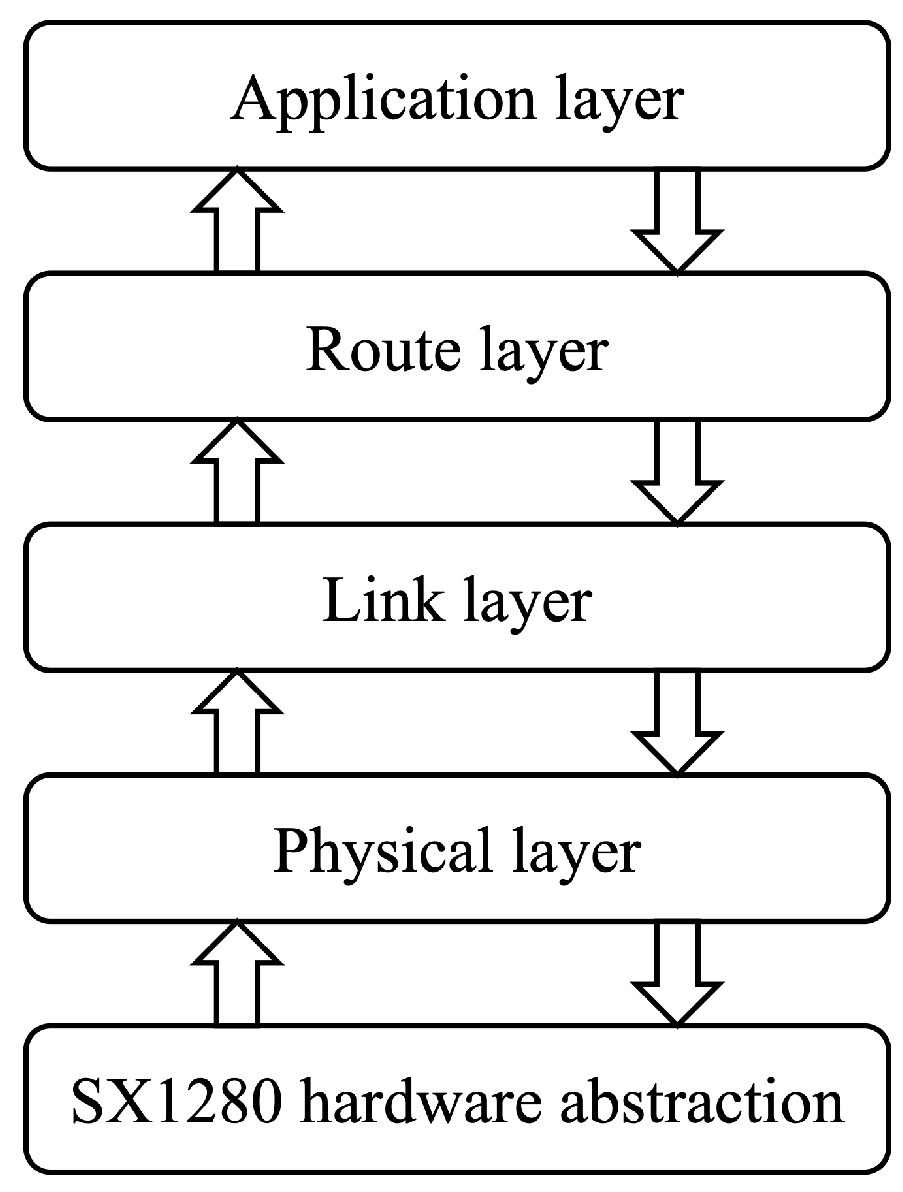
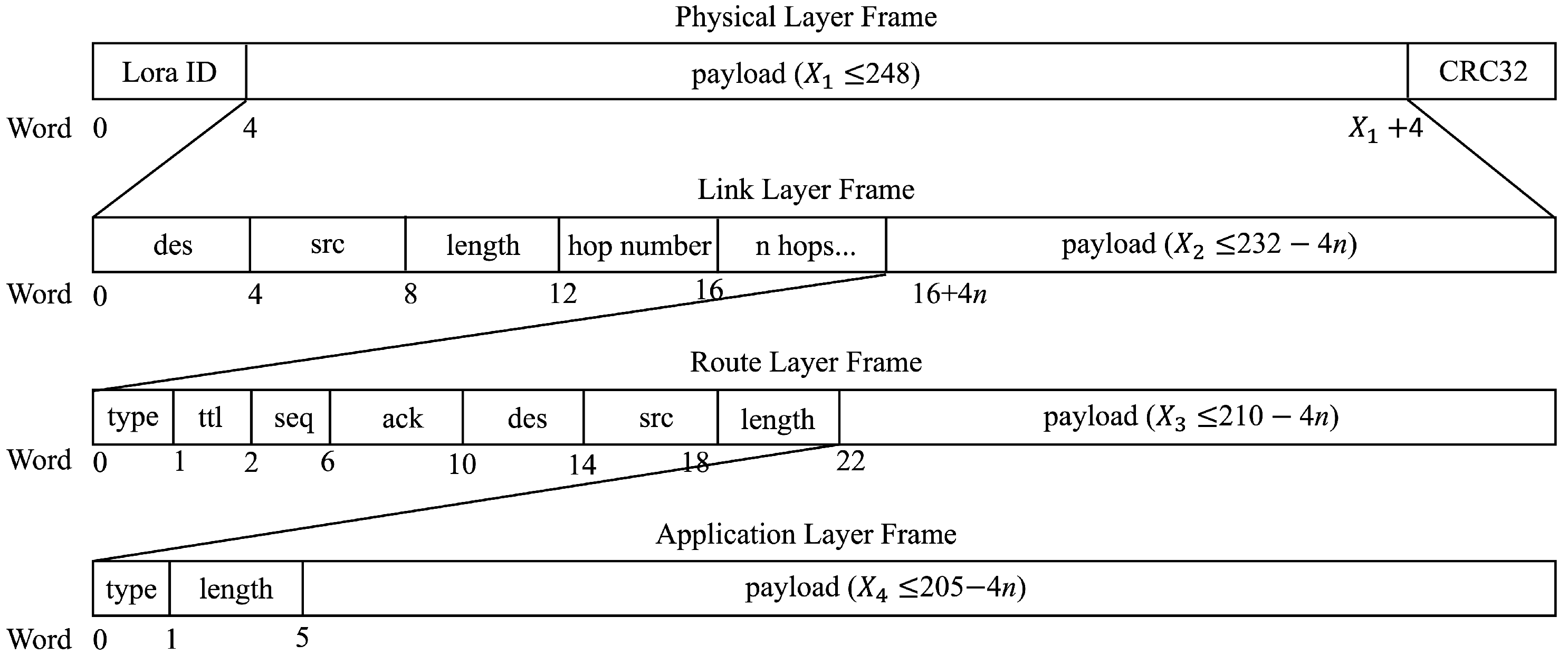
- For hardware design, a hardware abstraction layer is added for cost control or power optimization. Moreover, a LoRa Mesh protocol with low power consumption and high reliability is designed. In view of the lack of a LoRa Mesh protocol standard, we rebuild and simplify the LoRa Mesh protocol stack and improve the packet format. Compared with other wireless Mesh protocols, the route discovery and route maintenance process of the LoRa Mesh protocol designed in this paper is simpler and more energy-efficient. The protocol also introduces the mechanism of channel activity detection and packet Cyclic Redundancy Check (CRC) check to optimize packet congestion and improve communication reliability.
- A routing algorithm based on local link state information of nodes is designed. Under the background of limited local routing state information of nodes, the influence of communication delay, communication reliability, and node load is considered jointly, and the routing algorithm in the protocol is designed to improve the networking efficiency. The experimental results show that the proposed routing algorithm can take into account both delay and communication quality effectively compared with other routing algorithms.
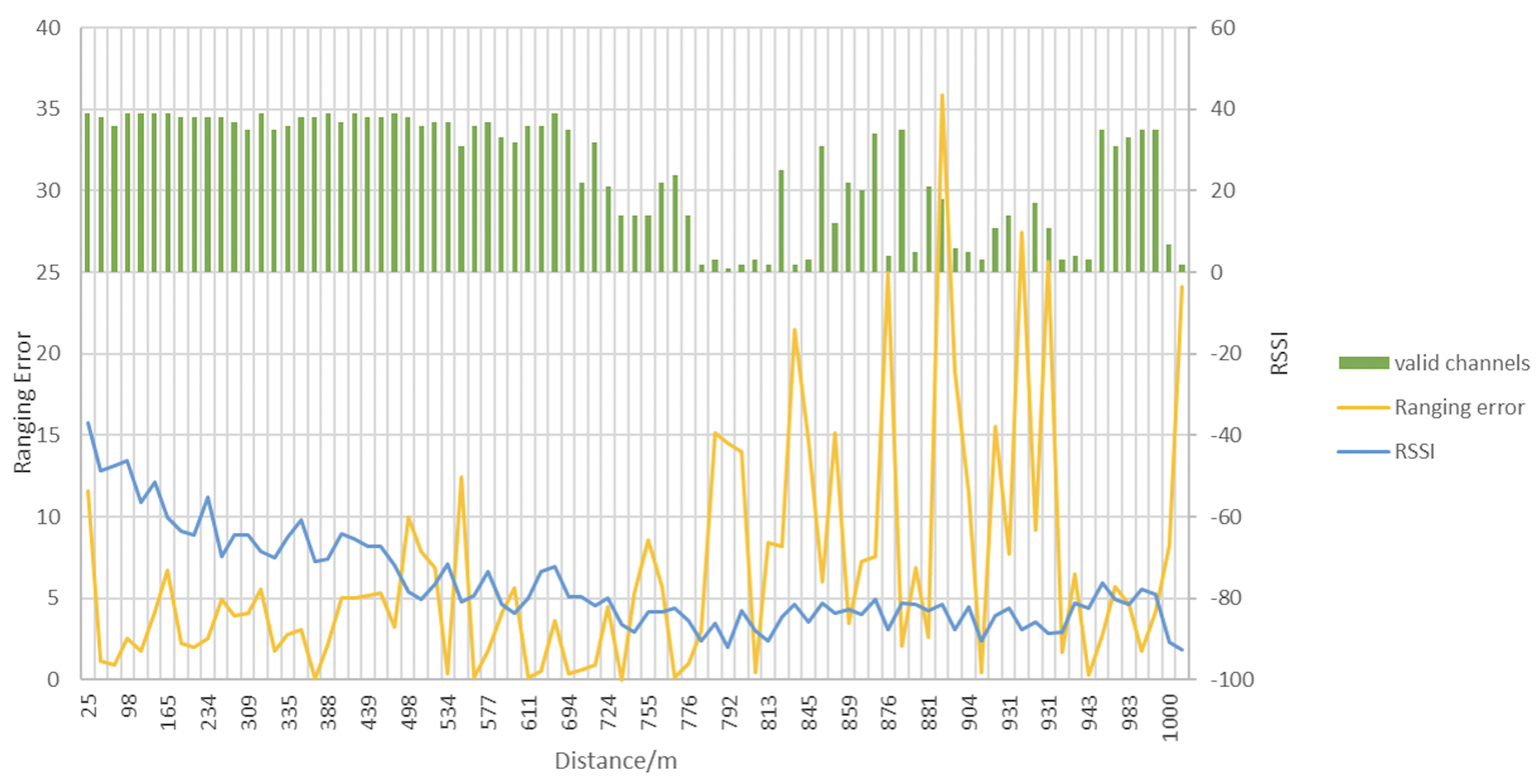
- A distance estimation algorithm based on multi-sample data of time of flight (TOF) and RSSI is designed. Aiming at the problem that the range accuracy of LoRa is easily affected by the NLOS path propagation of signals, based on the fusion of TOF and received signal strength indicator (RSSI) data obtained by multi-beat sampling, the line-of-sight channel, and non-line-of-sight channel are screened by clustering idea, and the line-of-sight (LOS) channel is found and the distance is estimated. The experimental results of distance measurement in outdoor scenes show that the average distance measurement error of this algorithm is about 6 m.
- A position estimation algorithm is designed to minimize the posterior RSSI error. By calculating the posterior RSSI error of position estimation coordinates, an evaluation criterion of position estimation results is designed. Based on this criterion, a heuristic anchor point selection method is designed to reduce the interference of bad anchor points and improve the accuracy of the position solution. Experimental results in outdoor scenes show that the proposed algorithm can provide meter-level positioning accuracy when the regional anchor point density is high.
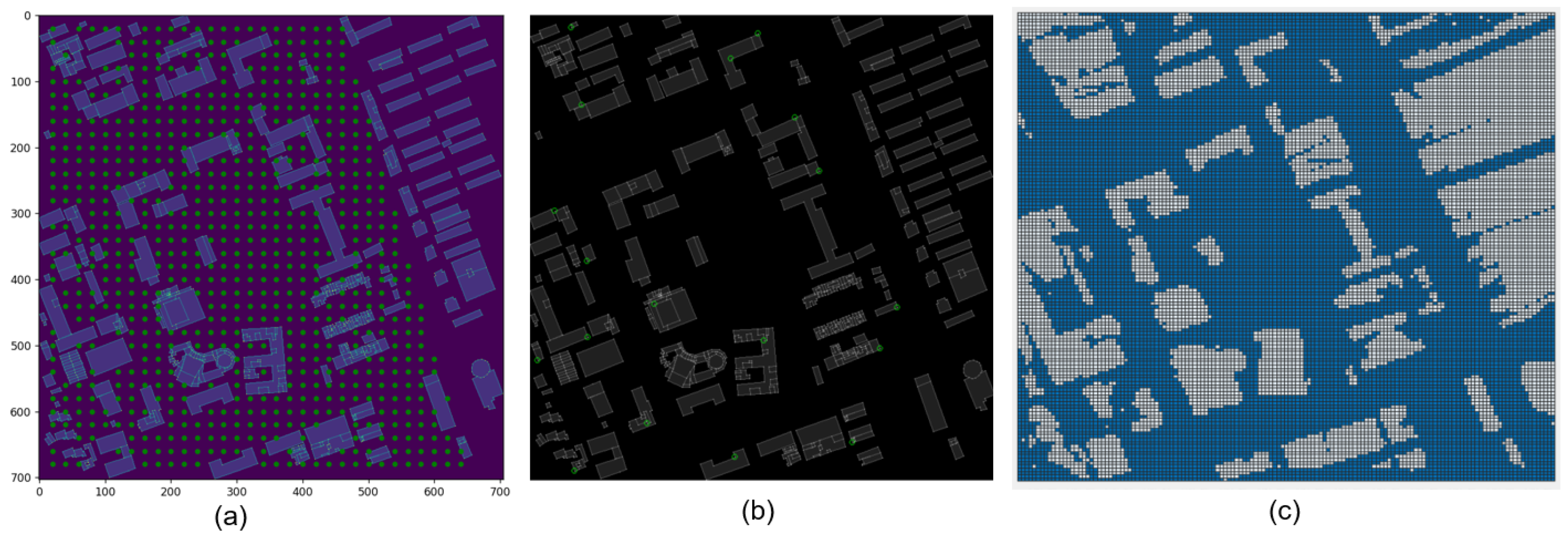
- The optimal position of the anchor point is discussed. In order to solve the problem of lack of reference basis for anchor location, electromagnetic simulation is used to simulate the spatial signal distribution, and a heuristic anchor location selection algorithm is designed based on the spatial signal distribution and a priori knowledge to find the best anchor location with the best coverage effect.
2. Literature Review
2.1. LoRa Primer and Its Mesh Networking
2.2. LoRa Localization
3. System Overview
4. System Design
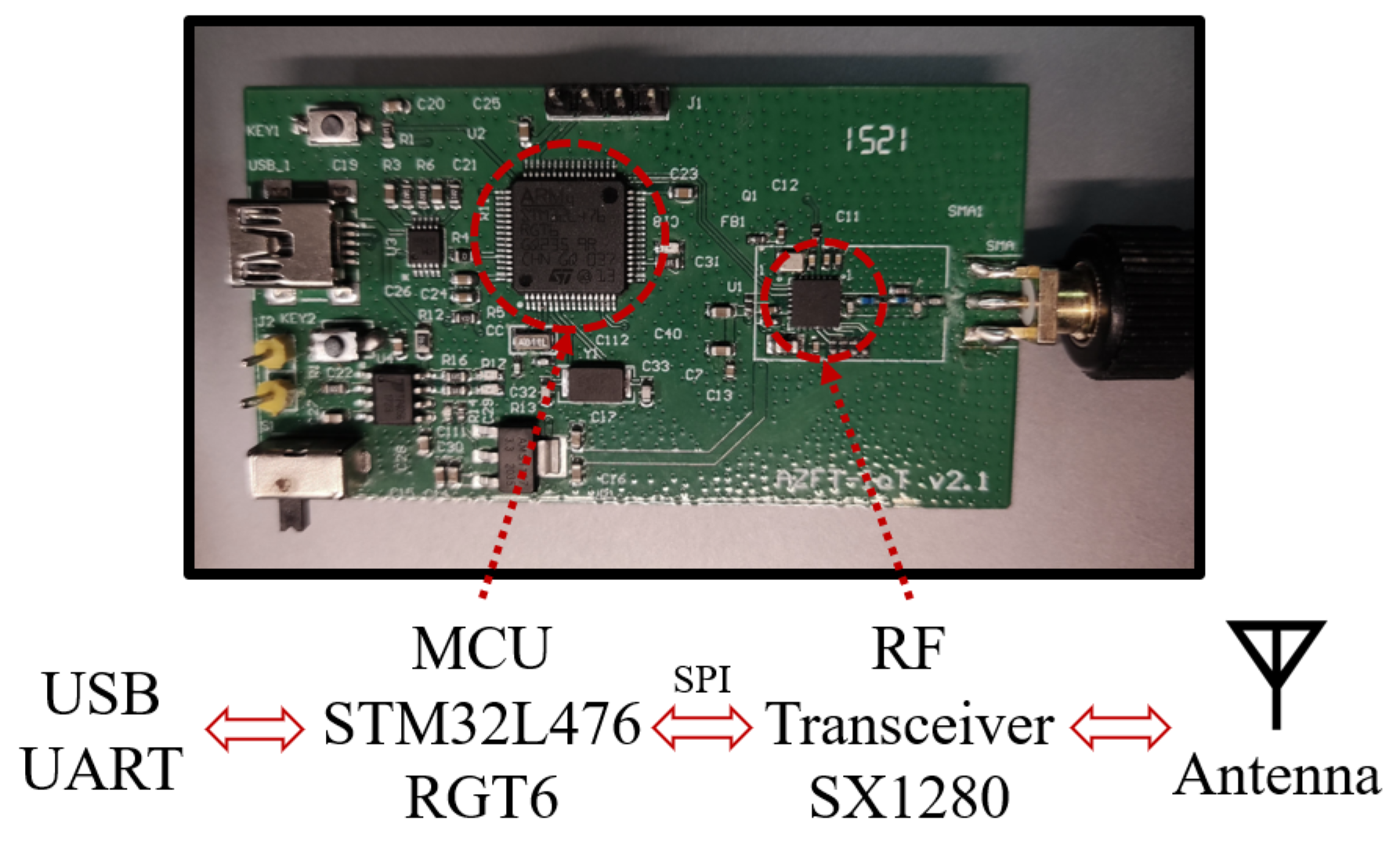
4.1. Hardware Design
4.2. LoRa Mesh Protocol Design
4.2.1. The Structure of the Mesh Protocol
4.2.2. Route Discovery and Maintenance
4.2.3. Routing Algorithm
4.3. LoRa Ranging and Localization
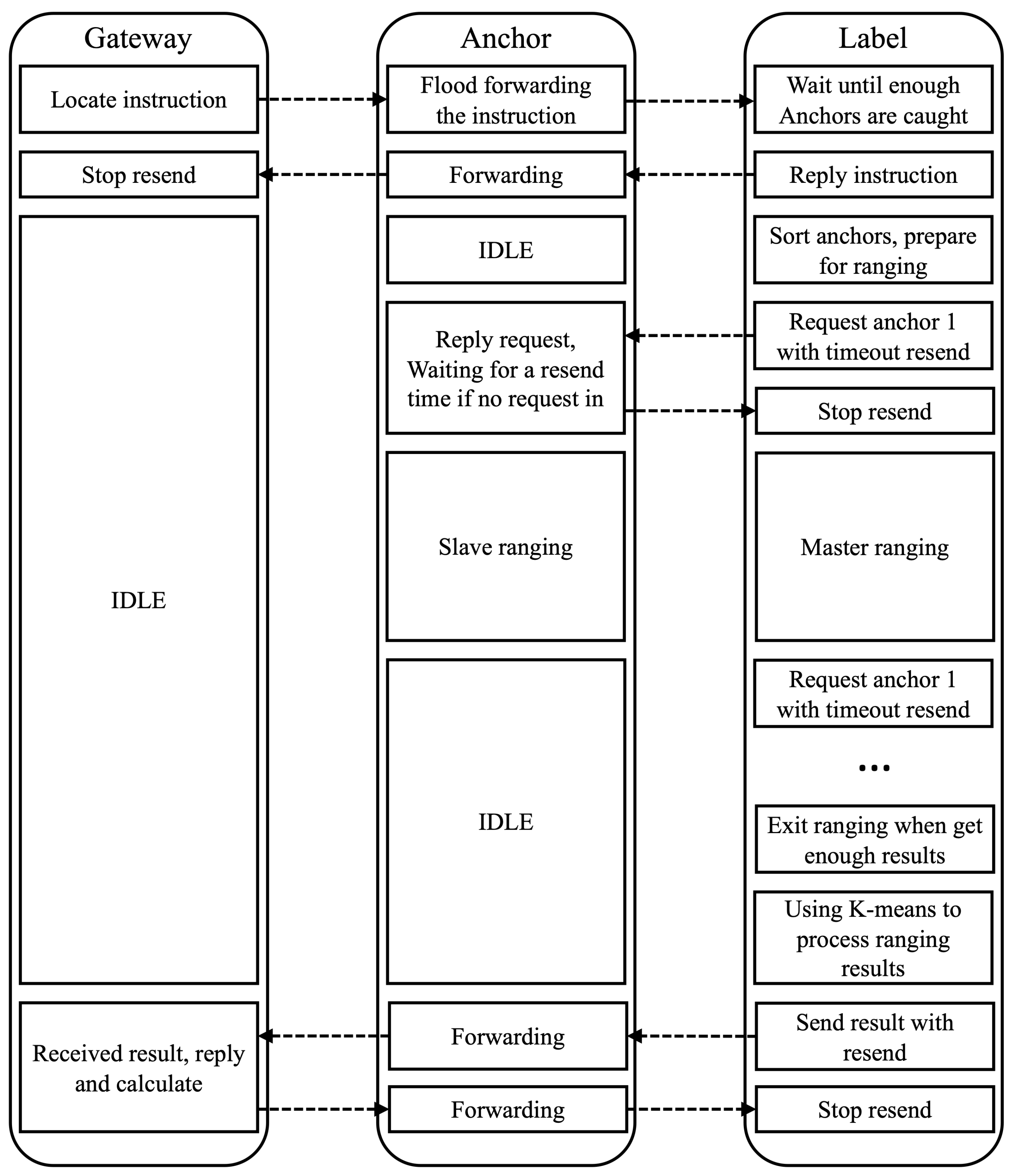
4.3.1. Positioning Workflow
4.3.2. Ranging Algorithm
| Algorithm 1: Distance estimation algorithm based on TOF-RSSI fusion clustering |
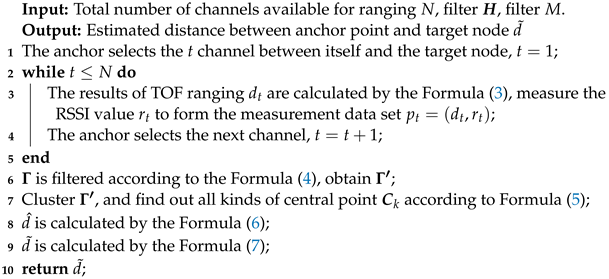 |
4.3.3. Location Algorithm
| Algorithm 2: Multi-point location algorithm based on minimizing posteriori error |
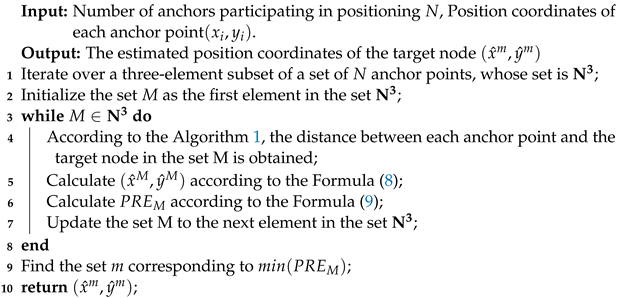 |
5. Implementation
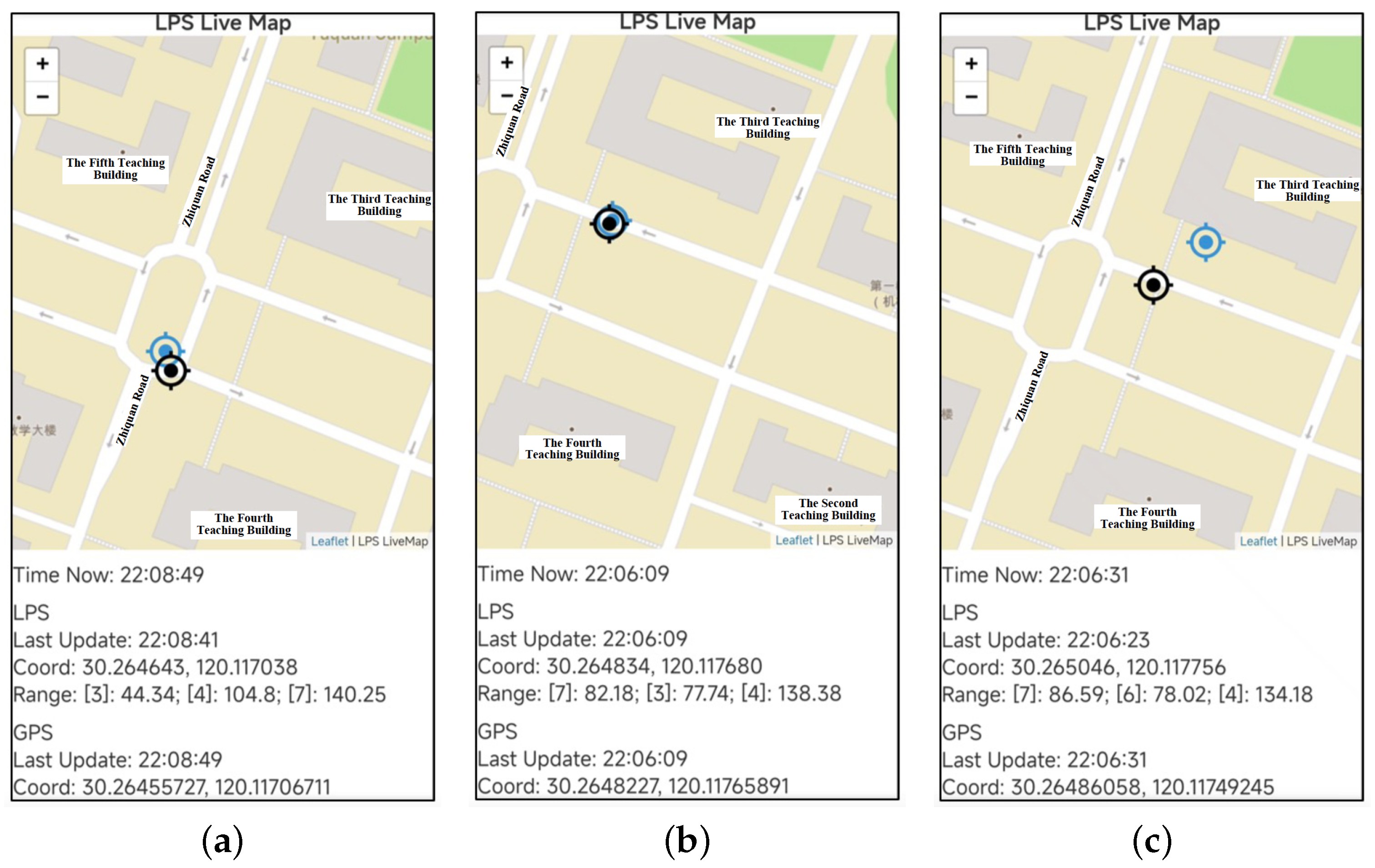
5.1. Control and Visualization Interface
5.2. Anchors Deployment
| Algorithm 3: LoRa anchors optimization deployment algorithm |
 |
6. Evaluation
6.1. Ranging Experiment
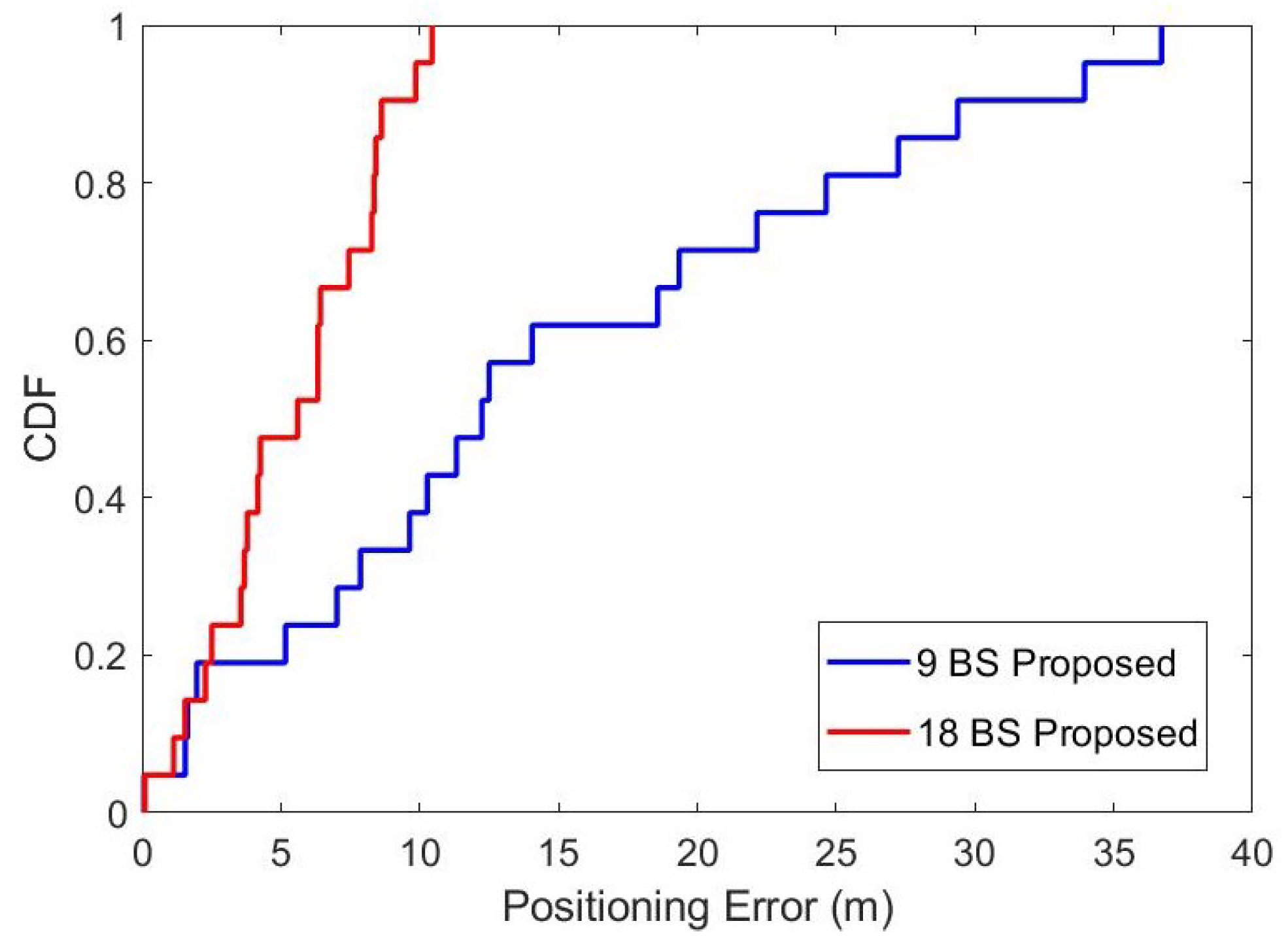
6.2. Positioning Experiment
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Hu, X.; Gao, Z.; Hu, J.; Chen, L.; He, Z.; Pei, L.; Chen, K.; Wang, M.; et al. Toward Location-Enabled IoT (LE-IoT): IoT Positioning Techniques, Error Sources, and Error Mitigation. IEEE Internet Things J. 2021, 8, 4035–4062. [Google Scholar] [CrossRef]
- Ramadan, M.; Sark, V.; Gutierrez, J.; Grass, E. NLOS Identification for Indoor Localization using Random Forest Algorithm. In Proceedings of the WSA 2018, 22nd International ITG Workshop on Smart Antennas, Bochum, Germany, 14–16 March 2018; pp. 1–5. [Google Scholar]
- Wielandt, S.; Goemaere, J.P.; De Strycker, L. Multipath-assisted angle of arrival indoor positioning system in the 2.4 GHz and 5 GHz band. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Alcala de Henares, Spain, 4–7 October 2016; pp. 1–6. [Google Scholar]
- Erceg, V.; Greenstein, L.; Tjandra, S.; Parkoff, S.; Gupta, A.; Kulic, B.; Julius, A.; Bianchi, R. An empirically based path loss model for wireless channels in suburban environments. IEEE J. Sel. Areas Commun. 1999, 17, 1205–1211. [Google Scholar] [CrossRef]
- Xu, X.; Peng, A.; Hong, X. Unscented Kalman Filtering Based Multipath-assisted Positioning with Peak Flow Tracking. In Proceedings of the IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–8 September 2022; pp. 1–8. [Google Scholar]
- Elbakly, R.; Aly, H.; Youssef, M. TrueStory: Accurate and Robust RF-Based Floor Estimation for Challenging Indoor Environments. IEEE Sens. J. 2018, 18, 10115–10124. [Google Scholar] [CrossRef]
- Li, Y.; Zhuang, Y.; Zhang, P.; Lan, H.; Niu, X.; El-Sheimy, N. An improved inertial/wifi/magnetic fusion structure for indoor navigation. Inf. Fusion 2017, 34, 101–119. [Google Scholar] [CrossRef]
- He, Z.; Petovello, M.; Lachapelle, G. Indoor doppler error characterization for high sensitivity GNSS receivers. IEEE Trans. Aerosp. Electron. Syst. 2014, 50. [Google Scholar] [CrossRef]
- Gu, C.; Jiang, L.; Tan, R. LoRa-Based Localization: Opportunities and Challenges. In Proceedings of the International Conference on Embedded Wireless Systems and Networks (EWSN), Beijing, China, 25–27 February 2019. [Google Scholar]
- Varsier, N.; Schwoerer, J. Capacity limits of LoRaWAN technology for smart metering applications. In Proceedings of the IEEE International Conference on Communications (ICC), Paris, France, 21–25 May 2017; pp. 1–6. [Google Scholar]
- Voigt, T.; Bor, M.; Roedig, U.; Alonso, J. Mitigating Inter-network Interference in LoRa Networks. In Proceedings of the International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017. [Google Scholar]
- Mikhaylov, K.; Petaejaejaervi, J.; Haenninen, T. Analysis of Capacity and Scalability of the LoRa Low Power Wide Area Network Technology. In Proceedings of the European Wireless 2016, 22nd European Wireless Conference, Oulu, Finland, 18–20 May 2016; pp. 1–6. [Google Scholar]
- Callebaut, G.; Van der Perre, L. Characterization of LoRa Point-to-Point Path Loss: Measurement Campaigns and Modeling Considering Censored Data. IEEE Internet Things J. 2020, 7, 1910–1918. [Google Scholar] [CrossRef]
- Lee, H.C.; Ke, K.H. Monitoring of Large-Area IoT Sensors Using a LoRa Wireless Mesh Network System: Design and Evaluation. IEEE Trans. Instrum. Meas. 2018, 67, 2177–2187. [Google Scholar] [CrossRef]
- O’Kennedy, M.; Niesler, T.; Wolhuter, R.; Mitton, N. Practical evaluation of carrier sensing for a LoRa wildlife monitoring network. In Proceedings of the IFIP Networking Conference (Networking), Paris, France, 22–26 June 2020; pp. 614–618. [Google Scholar]
- Pan, M.; Chen, C.; Yin, X.; Huang, Z. UAV-Aided Emergency Environmental Monitoring in Infrastructure-Less Areas: LoRa Mesh Networking Approach. IEEE Internet Things J. 2022, 9, 2918–2932. [Google Scholar] [CrossRef]
- Farzhana, I.; Chandrasekar, A.; Diwakaran, S.; Hemavathi, S.; Ramkumar, G. LoRaWAN Mesh Networks: An efficient mesh formation of LoRa devices in rural energy system. In Proceedings of the International Conference on Innovative Computing, Intelligent Communication and Smart Electrical Systems (ICSES), PChennai, India, 15–16 July 2022; pp. 1–8. [Google Scholar]
- Müller, P.; Stoll, H.; Sarperi, L.; Schüpbach, C. Outdoor Ranging and Positioning based on LoRa Modulation. In Proceedings of the International Conference on Localization and GNSS (ICL-GNSS), Tampere, Finland, 1–3 June 2021; pp. 1–6. [Google Scholar]
- You, L.; Zhe, H.; Li, Y.; Xu, H.; Yu, Z. Towards Location Enhanced IoT: Characterization of LoRa Signal For Wide Area Localization. In Proceedings of the 2018 Ubiquitous Positioning, Indoor Navigation and Location-Based Services (UPINLBS), Wuhan, China, 22–23 March 2018. [Google Scholar]
- Fargas, B.C.; Petersen, M.N. GPS-free geolocation using LoRa in low-power WANs. In Proceedings of the 2017 Global Internet of Things Summit (GIoTS), Geneva, Switzerland, 6–9 June 2017; pp. 1–6. [Google Scholar]
- Carvalho, D.F.; Depari, A.; Ferrari, P.; Flammini, A.; Rinaldi, S.; Sisinni, E. On the feasibility of mobile sensing and tracking applications based on LPWAN. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Republic of Korea, 12–14 March 2018; pp. 1–6. [Google Scholar]
- Nico, P.; David, P.; Jens, T.; Luc, M.; Pieter, S.; Kim, H.; Wout, J. TDoA-Based Outdoor Positioning with Tracking Algorithm in a Public LoRa Network. Wirel. Commun. Mob. Comput. 2018, 2018, 1864209. [Google Scholar]
- Lam, K.H.; Cheung, C.C.; Lee, W.C. RSSI-Based LoRa Localization Systems for Large-Scale Indoor and Outdoor Environments. IEEE Trans. Veh. Technol. 2019, 68, 11778–11791. [Google Scholar] [CrossRef]
- Nandakumar, R.; Iyer, V.; Gollakota, S. 3D Localization for Subcentimeter-Sized Devices. In Proceedings of the 16th ACM Conference on Embedded Networked Sensor Systems, Shenzhen, China, 4–7 November 2018; Volume 64, pp. 117–125. [Google Scholar]
- Lam, K.H.; Cheung, C.C.; Lee, W.C. LoRa-based localization systems for noisy outdoor environment. In Proceedings of the IEEE 13th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Rome, Italy, 9–11 October 2017; pp. 278–284. [Google Scholar]
- Bianco, G.M.; Marrocco, G. Radio Frequency Identification and Localization by Wearable LoRa for Search and Rescue in Mountains. In Proceedings of the IEEE International Conference on RFID (RFID), Las Vegas, NV, USA, 17–19 May 2022; pp. 120–125. [Google Scholar]
- Bornholdt, L.; Kaven, S.; Skwarek, V. Adaptive procedure for indoor localization using LoRa devices. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation (IPIN), Lloret de Mar, Spain, 29 November–2 December 2021; pp. 1–8. [Google Scholar]
- Shi, J.; Sha, M. Localizing Campus Shuttles from One Single Base Station Using LoRa Link Characteristics. In Proceedings of the International Conference on Computer Communications and Networks (ICCCN), Honolulu, HI, USA, 25–28 July 2022; pp. 1–10. [Google Scholar]
- Huang, K.W.; Lin, H.; Yang, R.M.; Chen, M.K. A Weighted Circular Algorithm Incorporated with Genetic Algorithms in RSSI Positioning Systems. In Proceedings of the IET International Conference on Engineering Technologies and Applications (IET-ICETA), Yunlin, Taiwan, 21–23 October 2022; pp. 1–2. [Google Scholar]
- He, Z.; Li, Y.; Pei, L.; O’Keefe, K. Enhanced Gaussian Process-Based Localization Using a Low Power Wide Area Network. IEEE Commun. Lett. 2019, 23, 164–167. [Google Scholar] [CrossRef]
- Demetri, S.; Zúñiga, M.; Picco, G.P.; Kuipers, F.; Bruzzone, L.; Telkamp, T. Automated Estimation of Link Quality for LoRa: A Remote Sensing Approach. In Proceedings of the 18th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Montreal, QC, Canada, 16–18 April 2019; pp. 145–156. [Google Scholar] [CrossRef]
- Liu, L.; Yao, Y.; Cao, Z.; Zhang, M. DeepLoRa: Learning Accurate Path Loss Model for Long Distance Links in LPWAN. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–13 May 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Lin, Y.; Dong, W.; Gao, Y.; Gu, T. SateLoc: A Virtual Fingerprinting Approach to Outdoor LoRa Localization using Satellite Images. In Proceedings of the 19th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Sydney, Australia, 21–24 April 2020; pp. 13–24. [Google Scholar] [CrossRef]
- Savazzi, P.; Goldoni, E.; Vizziello, A.; Favalli, L.; Gamba, P. A Wiener-Based RSSI Localization Algorithm Exploiting Modulation Diversity in LoRa Networks. IEEE Sens. J. 2019, 19, 12381–12388. [Google Scholar] [CrossRef]
- Chen, L.; Xiong, J.; Chen, X.; Chen, K.; Han, D.; Fang, D.; Tang, Z.; Wang, Z. WideSee: Towards wide-area contactless wireless sensing. In Proceedings of the 17th ACM Conference on Embedded Networked Sensor Systems (SenSys), New York, NY, USA, 10–13 November 2019. [Google Scholar]
- Purohit, J.; Wang, X.; Mao, S.; Sun, X.; Yang, C. Fingerprinting-based Indoor and Outdoor Localization with LoRa and Deep Learning. In Proceedings of the GLOBECOM 2020—IEEE Global Communications Conference, Taipei, Taiwan, 7–11 December 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Fang, J.; Wang, L.; Qin, Z.; Lu, B. LoRa-based Outdoor 3D Localization. In Proceedings of the IEEE INFOCOM 2022—IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS), Virtual, 2–5 May 2022; pp. 1–2. [Google Scholar] [CrossRef]
- Chen, H.; Zeng, J.; He, S.; Shi, Z.; Chen, J.; Tao, Z. MAGIC: A Lightweight System for Localizing Multiple Devices Via A Single LoRa Gateway. In Proceedings of the ICC 2020—2020 IEEE International Conference on Communications (ICC), Virtual, 7–11 June 2020; pp. 1–6. [Google Scholar]
- Michiel, A.; Rafael, B.; Koen, V.V.; Maarten, W. Sigfox and LoRaWAN Datasets for Fingerprint Localization in Large Urban and Rural Areas. Data 2018, 3, 13. [Google Scholar] [CrossRef]
- Kalousis, A.; Anagnostopoulos, G.G. A Reproducible Comparison of RSSI Fingerprinting Localization Methods Using LoRaWAN. In Proceedings of the 2019 16th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 23–24 October 2019. [Google Scholar]
- Janssen, T.; Berkvens, R.; Weyn, M. Benchmarking RSS-based Localization Algorithms with LoRaWAN. Internet Things 2020, 11, 100235. [Google Scholar] [CrossRef]
- Pandangan, Z.A.; Talampas, M. Hybrid LoRaWAN Localization using Ensemble Learning. In Proceedings of the 2020 Global Internet of Things Summit (GIoTS), Dublin, Ireland, 3–5 June 2020. [Google Scholar]
- Plets, D.; Podevijn, N.; Trogh, J.; Martens, L.; Joseph, W. Experimental Performance Evaluation of Outdoor TDoA and RSS Positioning in a Public LoRa Network. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Nantes, France, 24–27 September 2018. [Google Scholar]
- Choi, W.; Chang, Y.S.; Jung, Y.; Song, J. Low-Power LoRa Signal-Based Outdoor Positioning Using Fingerprint Algorithm. Int. J. Geo-Inf. 2018, 7, 440. [Google Scholar] [CrossRef]
- Gotthard, P.; Jankech, T. Low-Cost Car Park Localization Using RSSI in Supervised LoRa Mesh Networks. In Proceedings of the 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2018; pp. 1–6. [Google Scholar]
- Kaven, S.; Bornholdt, L.; Skwarek, V. Authentication by RSSI-Position Based Localization in a LoRa LPWAN. In Proceedings of the 2020 6th IEEE Congress on Information Science and Technology (CiSt), Agadir, Morocco, 12–18 December 2020; pp. 448–454. [Google Scholar]
- LoRa Reference Design for 2.4GHz Gateway Based on SX1280. Available online: https://www.semtech.com/products/wireless-rf/lora-core/sx1280zxxxxgw1 (accessed on 21 May 2023).
- Hu, K.; Chen, Y.; He, S.; Shi, Z.; Chen, J.; Tao, Z. iLoc: A Low-Cost Low-Power Outdoor Localization System for Internet of Things. In Proceedings of the IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Xu, Y.; Liu, Y.; Shi, Z. LoRaWAPS: A Wide-Area Positioning System Based on LoRa Mesh. Appl. Sci. 2023, 13, 9501. https://doi.org/10.3390/app13179501
Li B, Xu Y, Liu Y, Shi Z. LoRaWAPS: A Wide-Area Positioning System Based on LoRa Mesh. Applied Sciences. 2023; 13(17):9501. https://doi.org/10.3390/app13179501
Chicago/Turabian StyleLi, Bin, Yihao Xu, Ying Liu, and Zhiguo Shi. 2023. "LoRaWAPS: A Wide-Area Positioning System Based on LoRa Mesh" Applied Sciences 13, no. 17: 9501. https://doi.org/10.3390/app13179501
APA StyleLi, B., Xu, Y., Liu, Y., & Shi, Z. (2023). LoRaWAPS: A Wide-Area Positioning System Based on LoRa Mesh. Applied Sciences, 13(17), 9501. https://doi.org/10.3390/app13179501