
Development of the Gravel Pressure and Voice Synchronous Observation System and Application in Bedload Transport Measurement

Abstract
1. Introduction
2. Materials and Methods
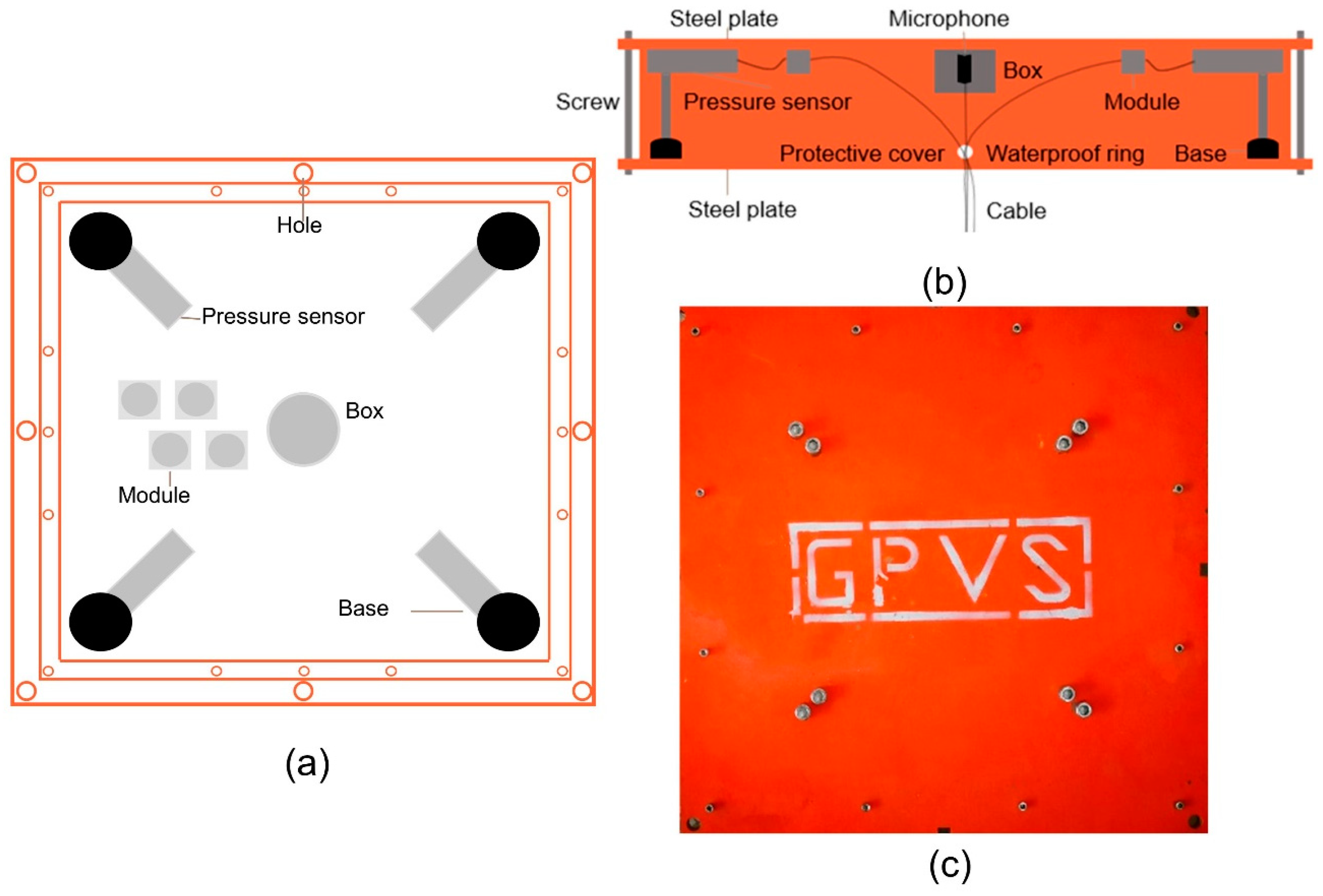
2.1. Instrument Design
2.2. Testing the Effectiveness of the Pressure System
2.2.1. Effect of Weight Position
2.2.2. Effect of Water Depth
2.2.3. Gravel Movement Experiment Procedure
2.3. Acoustic Method Experiments
3. Results
3.1. Effectiveness of the Pressure Method
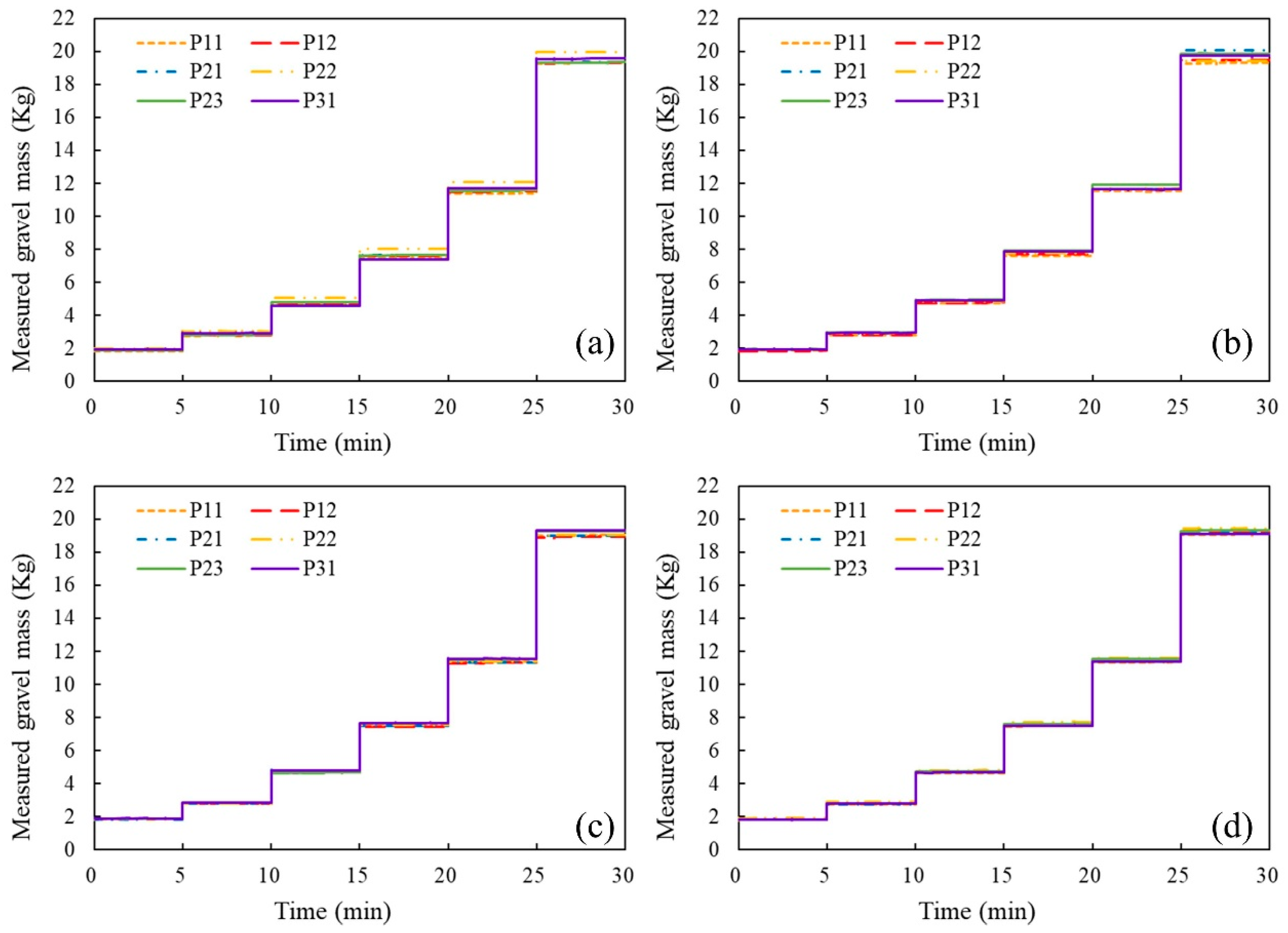
3.1.1. Effect of the Weight Position on the Measured Pressure
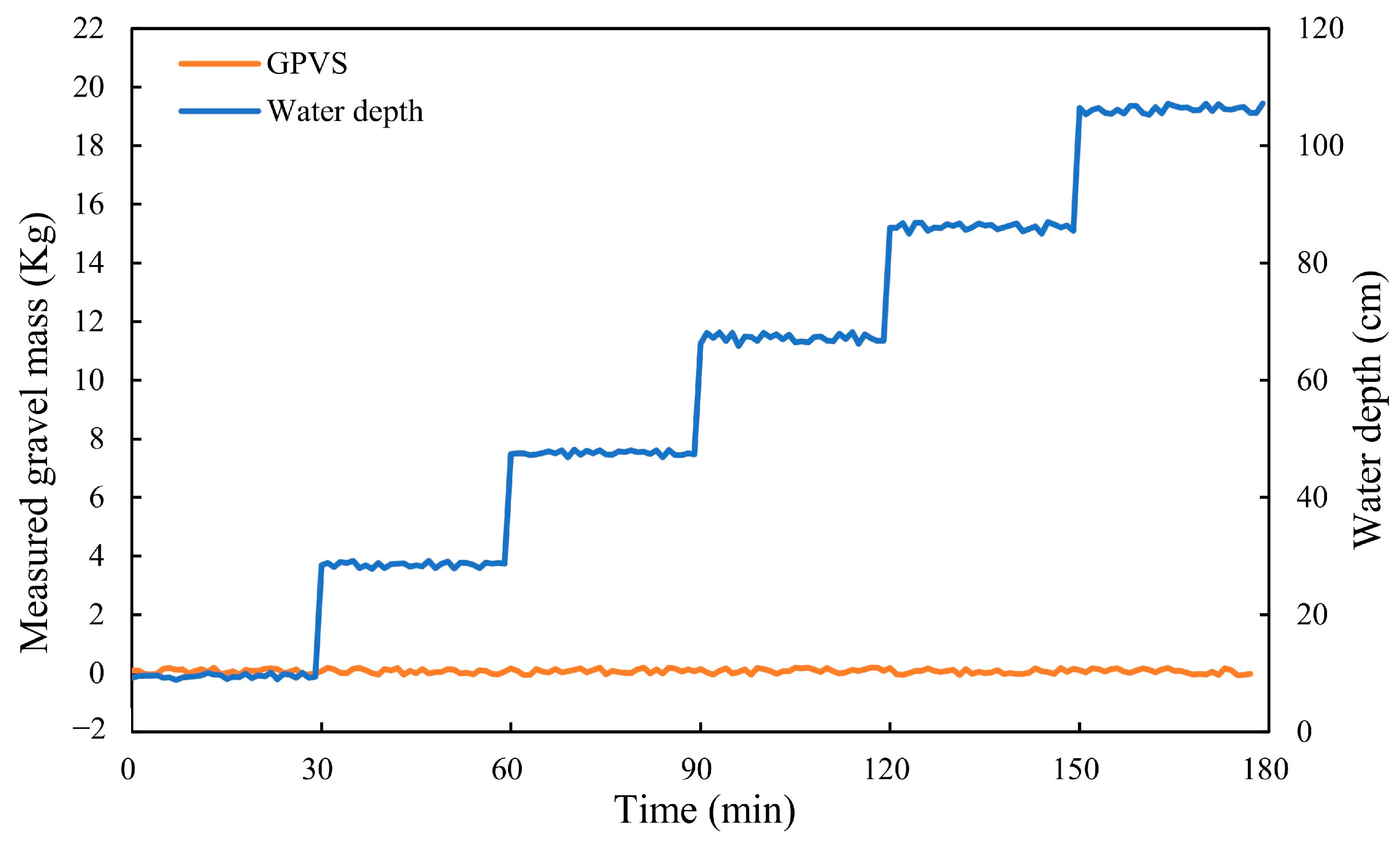
3.1.2. Effect of Water Depth on Pressure
3.1.3. Gravel Transport Mass
3.2. Gravel Transport Rate Analysis Using the Acoustic Method
3.2.1. Statistical Analysis of Gravel Transport Mass
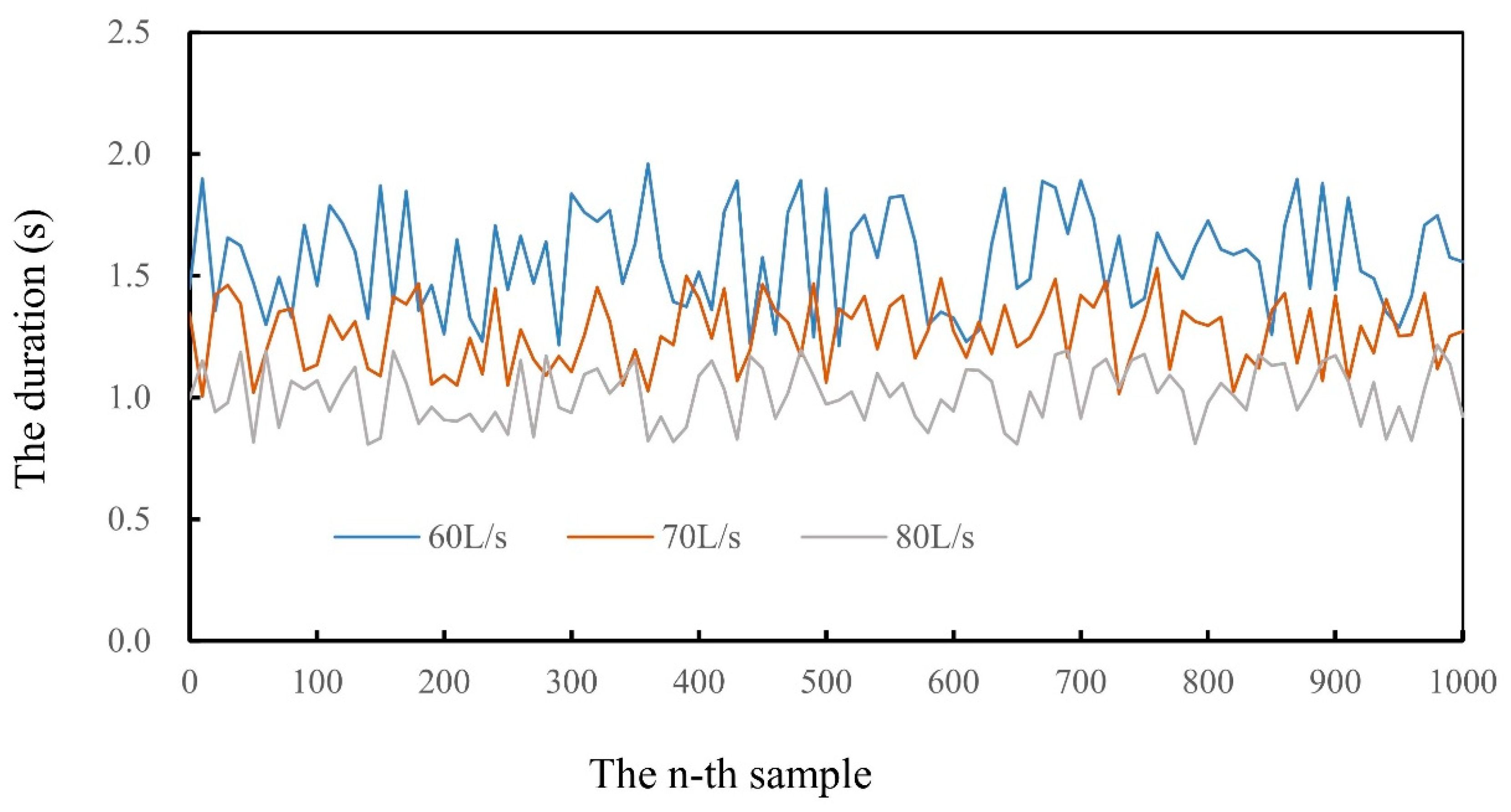
- Period of single gravel particle travel
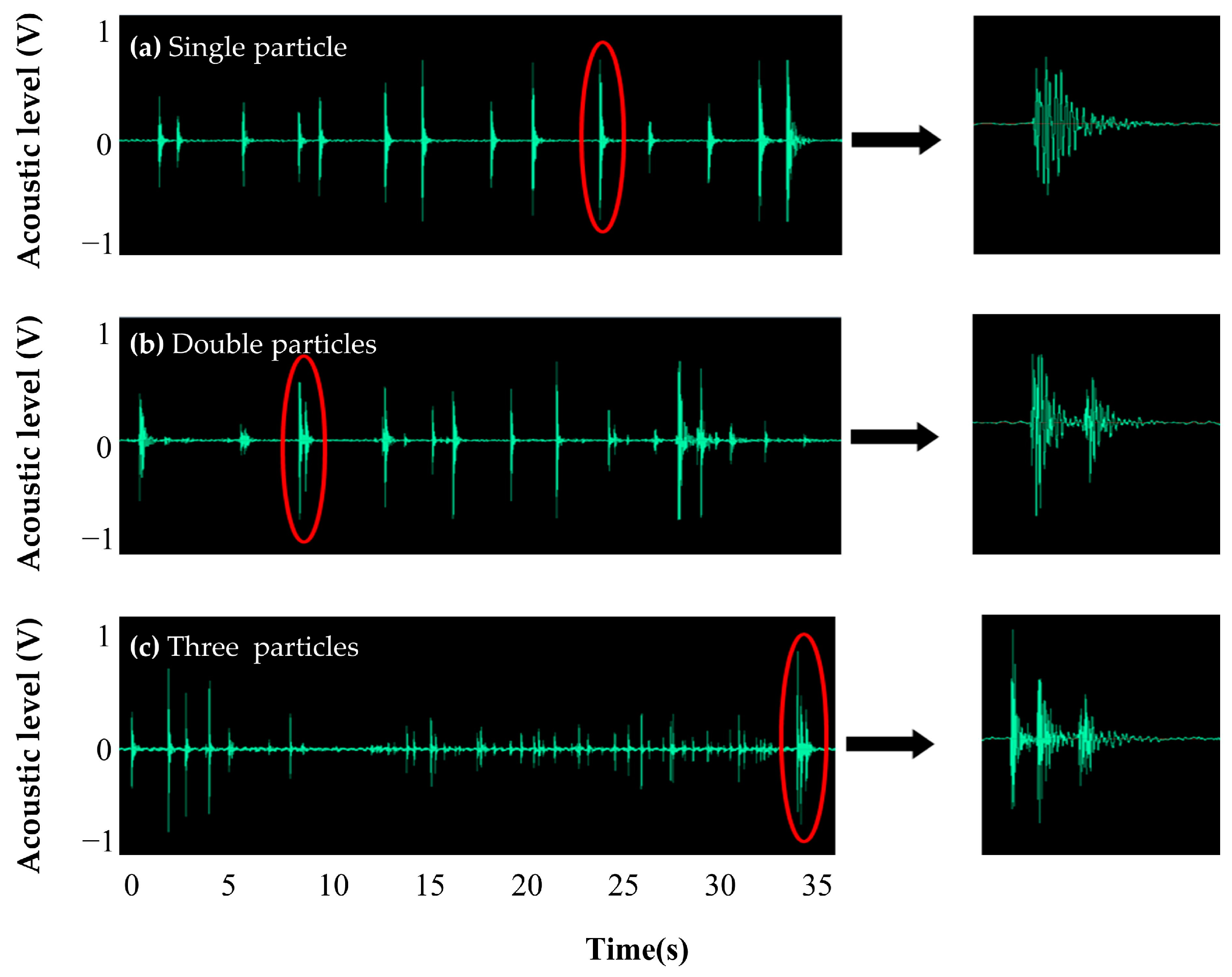
- Comparison of signal characteristics of a single gravel particle and multiple gravel particles.
3.2.2. Gravel Transport Rate
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, H.; Hsu, I. Investigation of Saltating Particle Motions. J. Hydraul. Eng. 1994, 120, 831–845. [Google Scholar] [CrossRef]
- Cristo, C.D.; Greco, M.; Iervolino, M.; Leopardi, A.; Vacca, A. Two-Dimensional Two-Phase Depth-Integrated Model for Transients over Mobile Bed. J. Hydraul. Eng. 2016, 142, 04015043. [Google Scholar] [CrossRef]
- Chien, N.; Wan, C. Mechanics of Sediment Transport; American Society of Civil Engineers: Reston, VA, USA, 1999; ISBN 978-0-7844-0400-3. [Google Scholar]
- Drake, T.G.; Shreve, R.L.; Dietrich, W.E.; Whiting, P.J.; Leopold, L.B. Bedload Transport of Fine Gravel Observed by Motion-Picture Photography. J. Fluid Mech. 1988, 192, 193–217. [Google Scholar] [CrossRef]
- Bassett, C.; Thomson, J.; Polagye, B. Sediment-Generated Noise and Bed Stress in a Tidal Channel. J. Geophys. Res. Ocean. 2013, 118, 2249–2265. [Google Scholar] [CrossRef]
- Bradley, D.N.; Tucker, G.E. Measuring Gravel Transport and Dispersion in a Mountain River Using Passive Radio Tracers. Earth Surf. Process. Landf. 2012, 37, 1034–1045. [Google Scholar] [CrossRef]
- Einstein, H.A. Formulas for the Transportation of Bed Load. T. Am. Soc. Civ. Eng. 1942, 107, 561–577. [Google Scholar] [CrossRef]
- Einstein H, A. The Bed-Load Function for Sediment Transportation in Open Channel Flows; Technical Bulletin; United States Department of Agriculture: Washington, DC, USA, 1950; pp. 35–39.
- Ancey, C.; Bohorquez, P.; Bardou, E. Sediment Transport in Mountain Rivers. Ercoftac Bull. 2014, 100, 37–52. [Google Scholar]
- Hubbell, D.W. Apparatus and Techniques for Measuring Bedload; USGS Numbered Series; U.S. Government Publishing Office: Washington, DC, USA, 1964; Volume 1748.
- Gray, J.R.; Laronne, J.B.; Marr, J.D.G. Bedload-Surrogate Monitoring Technologies; US Department of the Interior, US Geological Survey: Reston, VA, USA, 2010.
- Rickenmann, D. Bed-Load Transport Measurements with Geophones and Other Passive Acoustic Methods. J. Hydraul. Eng. 2017, 143, 03117004. [Google Scholar] [CrossRef]
- Ergenzinger, P.; Conrady, J. A New Tracer Technique for Measuring Bedload in Natural Channels. Catena 1982, 9, 77–80. [Google Scholar] [CrossRef]
- Phillips, C.B.; Jerolmack, D.J. Dynamics and Mechanics of Tracer Particles. Earth Surf. Dyn. Discuss. 2014, 2, 429–476. [Google Scholar] [CrossRef]
- Vázquez-Tarrío, D.; Menéndez-Duarte, R. Assessment of Bedload Equations Using Data Obtained with Tracers in Two Coarse-Bed Mountain Streams (Narcea River Basin, NW Spain). Geomorphology 2015, 238, 78–93. [Google Scholar] [CrossRef]
- Bunte, K.; Ergenzinger, P. New Tracer Techniques for Particles in Gravel Bed Rivers. Bull. Soc. Géograph. Liege 1989, 25, 85–90. [Google Scholar]
- Rasouli, M.; Bertrand, F.; Chaouki, J. A Multiple Radioactive Particle Tracking Technique to Investigate Particulate Flows. AIChE J. 2015, 61, 384–394. [Google Scholar] [CrossRef]
- Roy, S. Radiotracer and Particle Tracking Methods, Modeling and Scale-Up. AIChE J. 2017, 63, 314–326. [Google Scholar] [CrossRef]
- McNamara, J.P.; Borden, C. Observations on the Movement of Coarse Gravel Using Implanted Motion-Sensing Radio Transmitters. Hydrol. Process. 2004, 18, 1871–1884. [Google Scholar] [CrossRef]
- Habersack, H.M. Radio-Tracking Gravel Particles in a Large Braided River in New Zealand: A Field Test of the Stochastic Theory of Bed Load Transport Proposed by Einstein. Hydrol. Process. 2001, 15, 377–391. [Google Scholar] [CrossRef]
- Habersack, H. Use of Radio-Tracking Techniques in Bed Load Transport Investigations; IAHS-AISH Publication: Wallingford, UK, 2003; pp. 172–180. [Google Scholar]
- Ergenzinger, P.J.; Custer, S.G. Determination of Bedload Transport Using Naturally Magnetic Tracers: First Experiences at Squaw Creek, Gallatin County, Montana. Water Resour. Res. 1983, 19, 187–193. [Google Scholar] [CrossRef]
- Bunte, K. Measurements of Gravel Transport Using the Magnetic Tracer Technique: Temporal Variability over a Highflow Season and Field-Calibration. US Geol. Surv. Sci. Investig. Rep. 2010, 5091, 85–106. [Google Scholar]
- Beylich, A.A.; Laute, K. Combining Impact Sensor Field and Laboratory Flume Measurements with Other Techniques for Studying Fluvial Bedload Transport in Steep Mountain Streams. Geomorphology 2014, 218, 72–87. [Google Scholar] [CrossRef]
- Płaczkowska, E.; Krzemień, K.; Gorczyca, E.; Bojarczuk, A.; Żelazny, M. Disturbances in Coarse Bedload Transport in a High-Mountain Stream Channel System (Western Tatras, Poland). Geomorphology 2020, 371, 107428. [Google Scholar] [CrossRef]
- Gronz, O.; Hiller, P.H.; Wirtz, S.; Becker, K.; Iserloh, T.; Seeger, M.; Brings, C.; Aberle, J.; Casper, M.C.; Ries, J.B. Smartstones: A Small 9-Axis Sensor Implanted in Stones to Track Their Movements. Catena 2016, 142, 245–251. [Google Scholar] [CrossRef]
- Pretzlav, K.L.G.; Johnson, J.P.L.; Bradley, D.N. Smartrock Transport in a Mountain Stream: Bedload Hysteresis and Changing Thresholds of Motion. Water Resour. Res. 2020, 56, e2020WR028150. [Google Scholar] [CrossRef]
- Cassel, M.; Dépret, T.; Piégay, H. Assessment of a New Solution for Tracking Pebbles in Rivers Based on Active RFID. Earth Surf. Process. Landf. 2017, 42, 1938–1951. [Google Scholar] [CrossRef]
- Krein, A.; Klinck, H.; Eiden, M.; Symader, W.; Bierl, R.; Hoffmann, L.; Pfister, L. Investigating the Transport Dynamics and the Properties of Bedload Material with a Hydro-Acoustic Measuring System. Earth Surf. Process. Landf. 2008, 33, 152–163. [Google Scholar] [CrossRef]
- Penteado, M.R.M.; Franklin, E.d.M. Velocity Fields of a Bed-Load Layer under a Turbulent Liquid Flow. Exp. Therm. Fluid Sci. 2016, 78, 220–228. [Google Scholar] [CrossRef]
- Thorne, P.D. An Intercomparison between Visual and Acoustic Detection of Seabed Gravel Movement. Mar. Geol. 1986, 72, 11–31. [Google Scholar] [CrossRef]
- Thorne, P.D.; Williams, J.J.; Heathershaw, A.D. In Situ Acoustic Measurements of Marine Gravel Threshold and Transport. Sedimentology 1989, 36, 61–74. [Google Scholar] [CrossRef]
- Ancey, C.; Davison, A.C.; Böhm, T.; Jodeau, M.; Frey, P. Entrainment and Motion of Coarse Particles in a Shallow Water Stream down a Steep Slope. J. Fluid Mech. 2008, 595, 83–114. [Google Scholar] [CrossRef]
- Ancey, C.; Pascal, I. Estimating Mean Bedload Transport Rates and Their Uncertainty. J. Geophys. Res. Earth Surf. 2020, 125, e2020JF005534. [Google Scholar] [CrossRef]
- Ermilov, A.A.; Fleit, G.; Conevski, S.; Guerrero, M.; Baranya, S.; Rüther, N. Bedload Transport Analysis Using Image Processing Techniques. Acta Geophys. 2022, 70, 2341–2360. [Google Scholar] [CrossRef]
- Yager, E.M.; Kenworthy, M.; Monsalve, A. Taking the River inside: Fundamental Advances from Laboratory Experiments in Measuring and Understanding Bedload Transport Processes. Geomorphology 2015, 244, 21–32. [Google Scholar] [CrossRef]
- Geay, T.; Belleudy, P.; Gervaise, C.; Habersack, H.; Aigner, J.; Kreisler, A.; Seitz, H.; Laronne, J.B. Passive Acoustic Monitoring of Bed Load Discharge in a Large Gravel Bed River. J. Geophys. Res. Earth Surf. 2017, 122, 528–545. [Google Scholar] [CrossRef]
- Tian, M.; Yang, S.; Guo, Q. Gravel movement real-time tracking based on underwater acoustic principle. J. Sediment Res. 2017, 42, 14–19. [Google Scholar]
- Marineau, M.D.; Wright, S.A.; Gaeuman, D. Calibration of Sediment-Generated Noise Measured Using Hydrophones to Bedload Transport in the Trinity River, California, USA. 2016, Volume 9. Available online: https://www.researchgate.net/profile/Mathieu-Marineau/publication/305280105_Calibration_of_sediment_generated_noise_measured_using_hydrophones_to_bedload_transport_in_the_Trinity_River_California_USA/links/57867a4908aef321de2c6b29/Calibration-of-sediment-generated-noise-measured-using-hydrophones-to-bedload-transport-in-the-Trinity-River-California-USA.pdf (accessed on 29 June 2023).
- Krein, A.; Schenkluhn, R.; Kurtenbach, A.; Bierl, R.; Barrière, J. Listen to the Sound of Moving Sediment in a Small Gravel-Bed River. Int. J. Sediment Res. 2016, 31, 271–278. [Google Scholar] [CrossRef]
- Le Guern, J.; Rodrigues, S.; Geay, T.; Zanker, S.; Hauet, A.; Tassi, P.; Claude, N.; Jugé, P.; Duperray, A.; Vervynck, L. Relevance of Acoustic Methods to Quantify Bedload Transport and Bedform Dynamics in a Large Sandy-Gravel-Bed River. Earth Surf. Dynam. 2021, 9, 423–444. [Google Scholar] [CrossRef]
- Geay, T.; Belleudy, P.; Laronne, J.B.; Camenen, B.; Gervaise, C. Spectral Variations of Underwater River Sounds. Earth Surf. Process. Landf. 2017, 42, 2447–2456. [Google Scholar] [CrossRef]
- Geay, T.; Zanker, S.; Petrut, T.; Recking, A. Measuring Bedload Grain-Size Distributions with Passive Acoustic Measurements. E3S Web Conf. 2018, 40, 04010. [Google Scholar] [CrossRef]
- Geay, T.; Zanker, S.; Misset, C.; Recking, A. Passive Acoustic Measurement of Bedload Transport: Toward a Global Calibration Curve? J. Geophys. Res. Earth Surf. 2020, 125, e2019JF005242. [Google Scholar] [CrossRef]
- Nasr, M.; Johannot, A.; Geay, T.; Zanker, S.; Le Guern, J.; Recking, A. Passive Acoustic Monitoring of Bed Load with Drifted Hydrophone. J. Hydraul. Eng. 2023, 149, 06023003. [Google Scholar] [CrossRef]
- Nasr, M.; Geay, T.; Zanker, S.; Recking, A. A Physical Model for Acoustic Noise Generated by Bedload Transport in Rivers. J. Geophys. Res. Earth Surf. 2022, 127, e2021JF006167. [Google Scholar] [CrossRef]
- Nasr, M.; Johannot, A.; Geay, T.; Zanker, S.; Le Guern, J.; Recking, A. Optimization of Passive Acoustic Bedload Monitoring in Rivers by Signal Inversion. Earth Surf. Dyn. Discuss. 2023; in review. [Google Scholar] [CrossRef]
- Wyss, C.R.; Rickenmann, D.; Fritschi, B.; Turowski, J.M.; Weitbrecht, V.; Boes, R.M. Measuring Bed Load Transport Rates by Grain-Size Fraction Using the Swiss Plate Geophone Signal at the Erlenbach. J. Hydraul. Eng. 2016, 142, 04016003. [Google Scholar] [CrossRef]
- Rickenmann, D. Bedload Transport Measurements with Geophones, Hydrophones, and Underwater Microphones (Passive Acoustic Methods). In Gravel-Bed Rivers; Tsutsumi, D., Laronne, J.B., Eds.; John Wiley & Sons, Ltd.: Chichester, UK, 2017; pp. 185–208. ISBN 978-1-118-97143-7. [Google Scholar]
- Nicollier, T.; Rickenmann, D.; Hartlieb, A. Field and Flume Measurements with the Impact Plate: Effect of Bedload Grain-size Distribution on Signal Response. Earth Surf. Process. Landforms 2021, 46, 1504–1520. [Google Scholar] [CrossRef]
- Nicollier, T.; Antoniazza, G.; Rickenmann, D.; Hartlieb, A.; Kirchner, J.W. Improving the Calibration of the Swiss Plate Geophone Bedload Monitoring System by Filtering Out Seismic Signals from Extraneous Particle Impacts. Earth Space Sci. 2022, 9, e2021EA001962. [Google Scholar] [CrossRef]
- Antoniazza, G.; Nicollier, T.; Boss, S.; Mettra, F.; Badoux, A.; Schaefli, B.; Rickenmann, D.; Lane, S.N. Hydrological Drivers of Bedload Transport in an Alpine Watershed. Water Resour. Res. 2022, 58, e2021WR030663. [Google Scholar] [CrossRef]
- Rickenmann, D.; Ammann, L.; Nicollier, T.; Boss, S.; Fritschi, B.; Antoniazza, G.; Steeb, N.; Chen, Z.; Wyss, C.; Badoux, A. Comparison of Calibration Characteristics of Different Acoustic Impact Systems for Measuring Bedload Transport in Mountain Streams. Earth Surf. Dyn. 2022, 10, 1165–1183. [Google Scholar] [CrossRef]
- Tian, M.; Yang, S.; Zhang, P. Detection of the Bedload Movement with an Acoustic Sensor in the Yangtze River, China. Water 2023, 15, 939. [Google Scholar] [CrossRef]
- Thorne, P.D. The Measurement of Acoustic Noise Generated by Moving Artificial Sediments. J. Acoust. Soc. Am. 1985, 78, 1013–1023. [Google Scholar] [CrossRef]
- Thorne, P.D. Laboratory and Marine Measurements on the Acoustic Detection of Sediment Transport. J. Acoust. Soc. Am. 1986, 80, 899–910. [Google Scholar] [CrossRef]
- Thorne, P.D. An Overview of Underwater Sound Generated by Inter-Particle Collisions and Its Application to the Measurements of Coarse Sediment Bedload Transport. Earth Surf. Dyn. 2014, 2, 531–543. [Google Scholar] [CrossRef][Green Version]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | 1 | 2 | 3 | 4 | 5 |
|---|---|---|---|---|---|
| GPVS | 24.78 kg | 30.92 kg | 28.63 kg | 21.94 kg | 26.32 kg |
| Bedload trap | 25.98 kg | 32.05 kg | 29.87 kg | 22.63 kg | 28.74 kg |
| Flow Discharge (L/s) | Time (s) | Average Time (s) |
|---|---|---|
| 60 | 1.21~1.96 | 1.568 |
| 70 | 1.01~1.53 | 1.263 |
| 80 | 0.81~1.19 | 1.013 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, M.; Yang, S.; Zhang, P.; Guo, Q. Development of the Gravel Pressure and Voice Synchronous Observation System and Application in Bedload Transport Measurement. Appl. Sci. 2023, 13, 9429. https://doi.org/10.3390/app13169429
Tian M, Yang S, Zhang P, Guo Q. Development of the Gravel Pressure and Voice Synchronous Observation System and Application in Bedload Transport Measurement. Applied Sciences. 2023; 13(16):9429. https://doi.org/10.3390/app13169429
Chicago/Turabian StyleTian, Mi, Shengfa Yang, Peng Zhang, and Qi Guo. 2023. "Development of the Gravel Pressure and Voice Synchronous Observation System and Application in Bedload Transport Measurement" Applied Sciences 13, no. 16: 9429. https://doi.org/10.3390/app13169429
APA StyleTian, M., Yang, S., Zhang, P., & Guo, Q. (2023). Development of the Gravel Pressure and Voice Synchronous Observation System and Application in Bedload Transport Measurement. Applied Sciences, 13(16), 9429. https://doi.org/10.3390/app13169429