

Real-Time Adjustment and Spatial Data Integration Algorithms Combining Total Station and GNSS Surveys with an Earth Gravity Model



Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
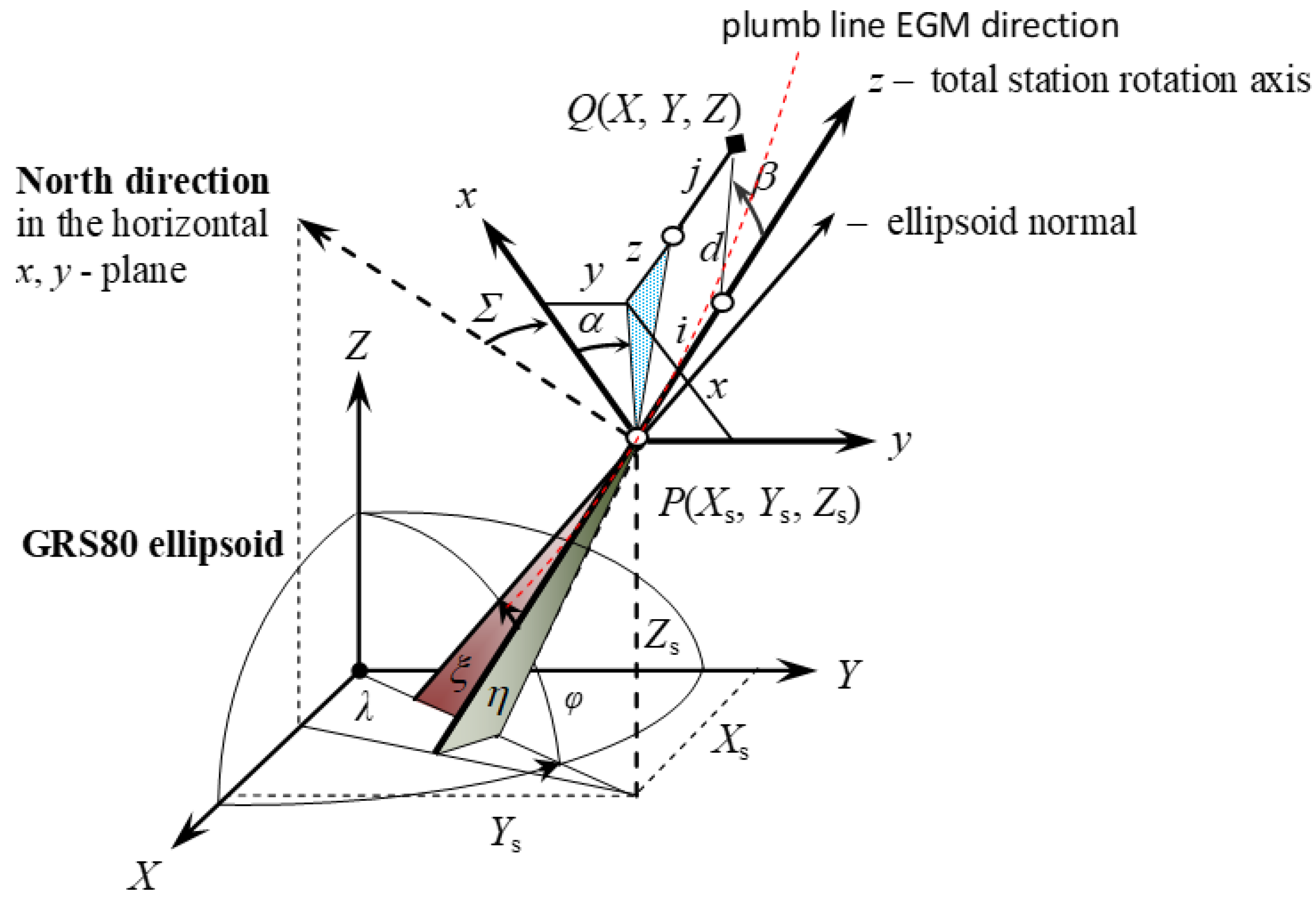
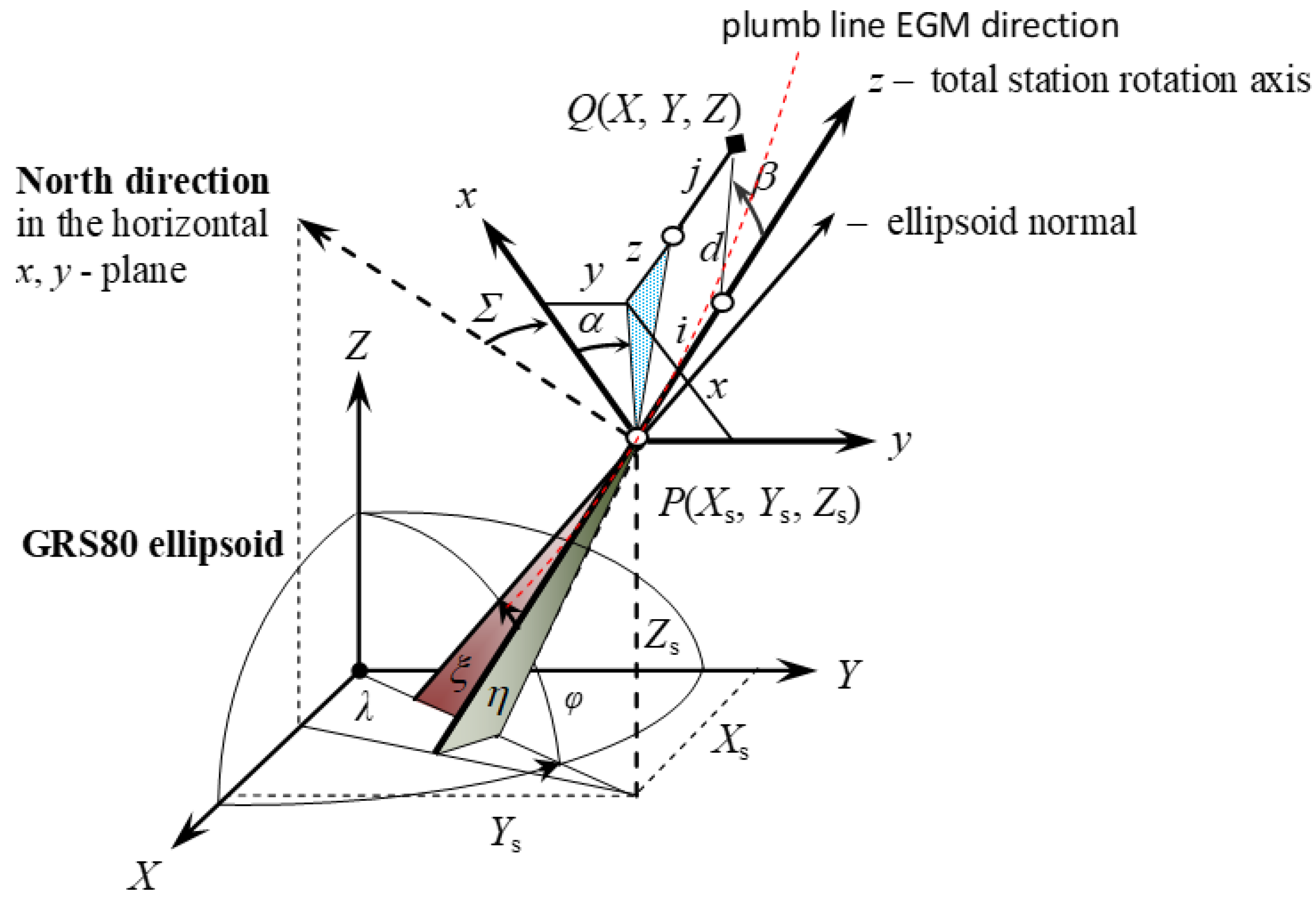
2.1. General Assumptions
- , the geocentric GRS80 coordinates of the origin P of the total stationtotal station or a terrestrial laser scanner (TLS) measuring frame ;
- , the orientation angles of the measuring frame with respect to the external reference frame .
2.2. The Observational Equations of the Integrated Data
- are differentials of the coordinates ;
- are the measurement random errors with zero expected value and known covariance matrix:
- are approximate values of the measured coordinates:
2.3. Adjustment of the Integrated Data at the Current Position of the Total Station Using the Statistical General Linear Mixed Model
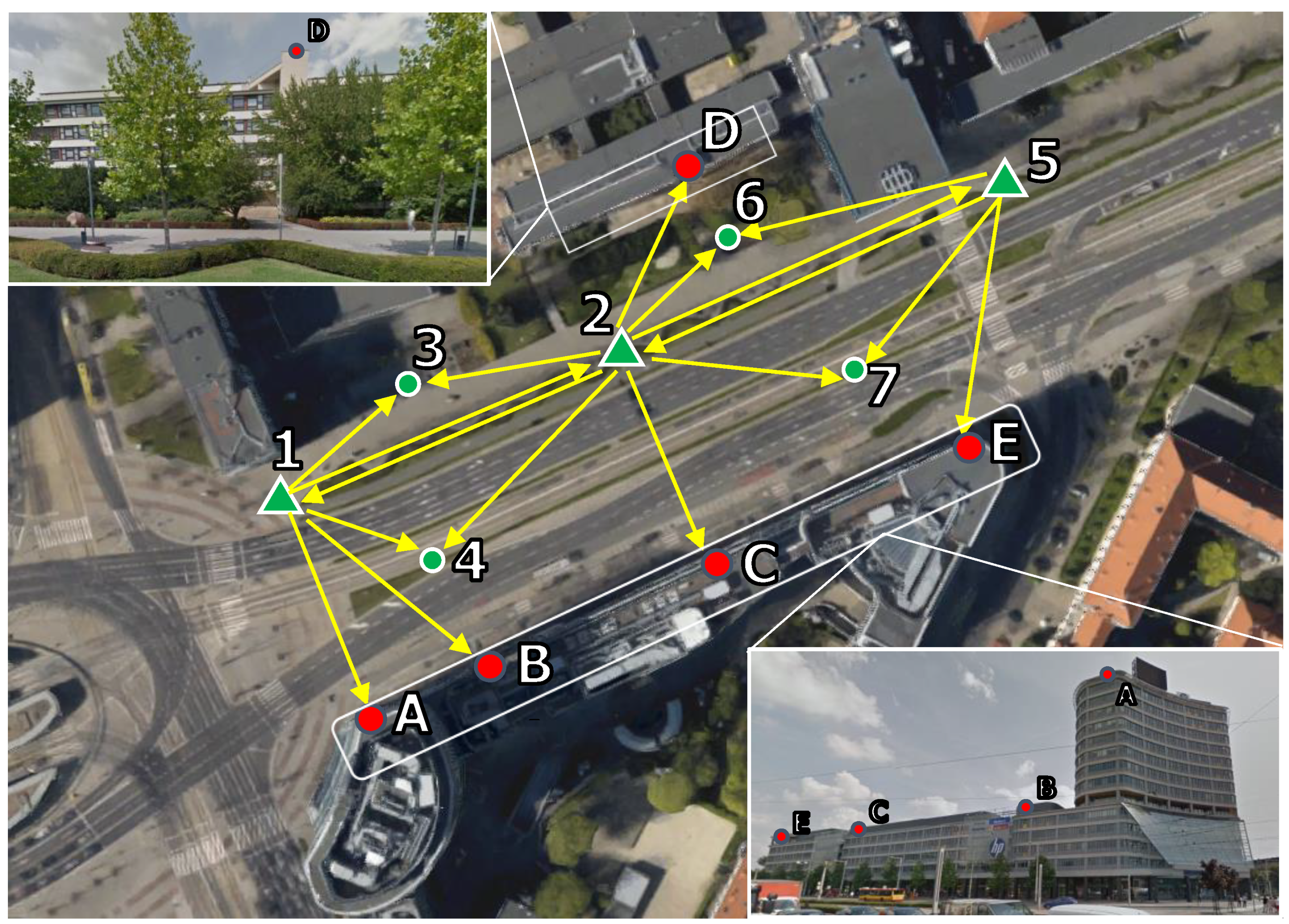
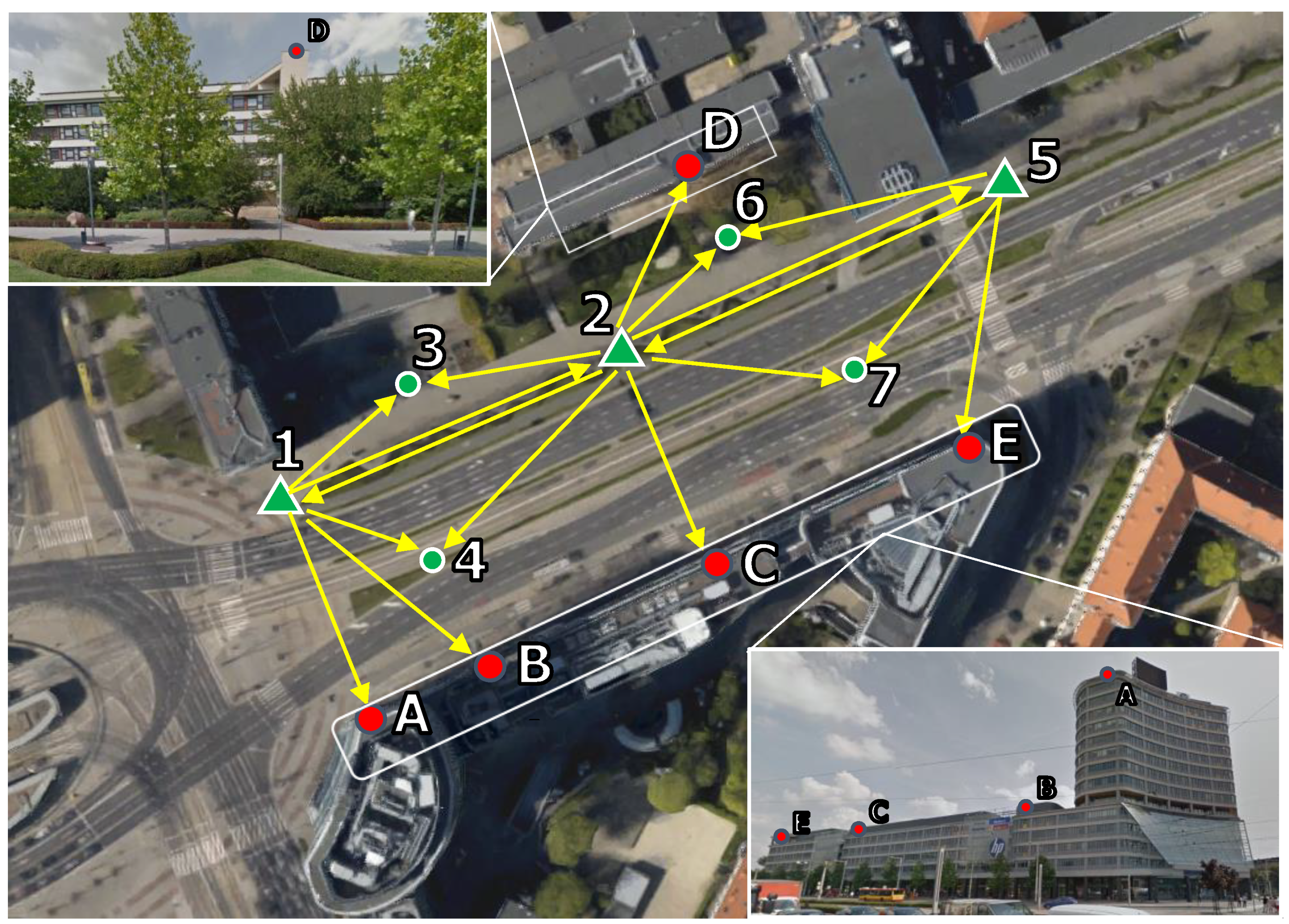
2.4. Experimental Works
2.4.1. Classical Offline Adjustment
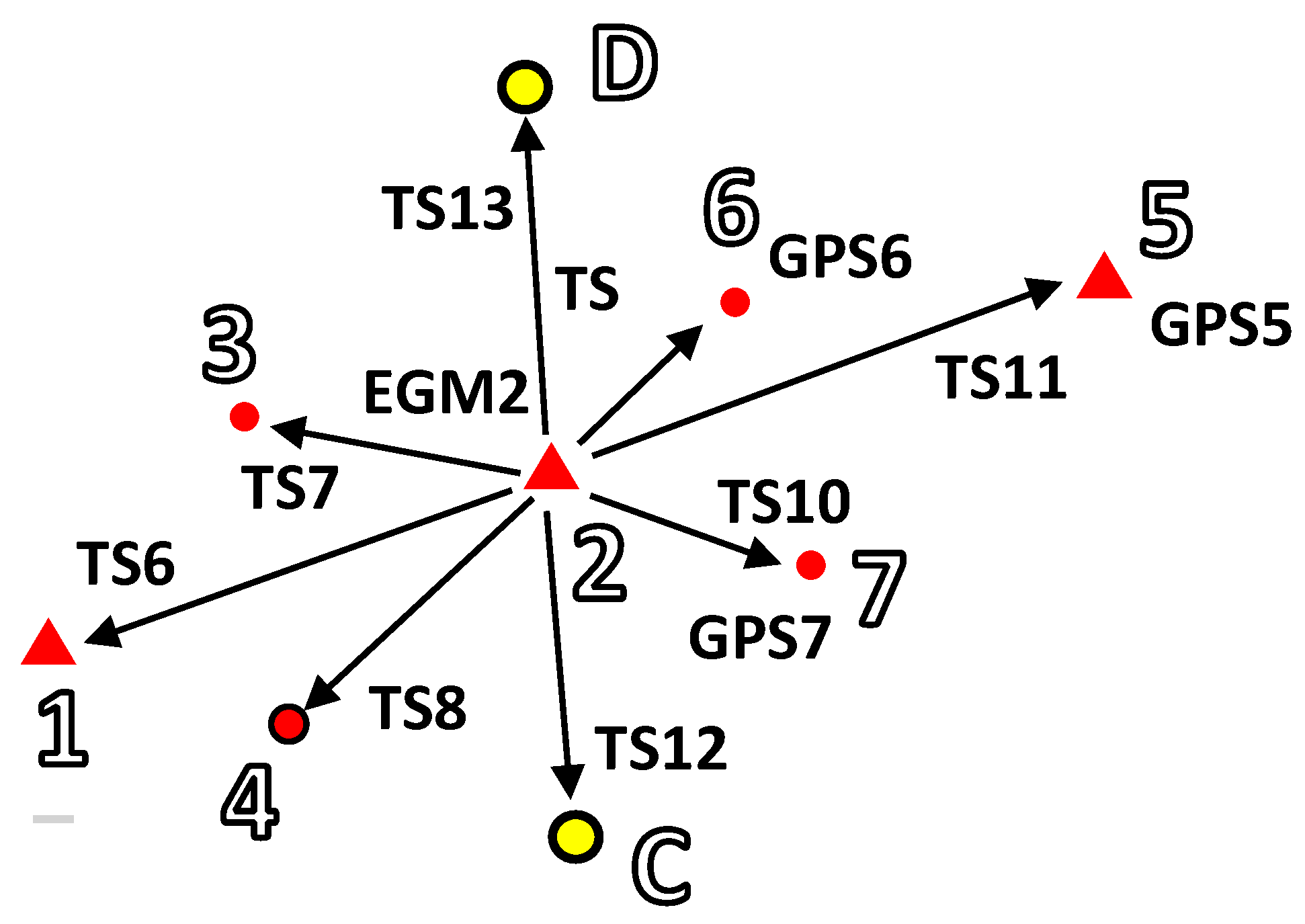
2.4.2. Sequential Online Adjustments of Total Station Positions
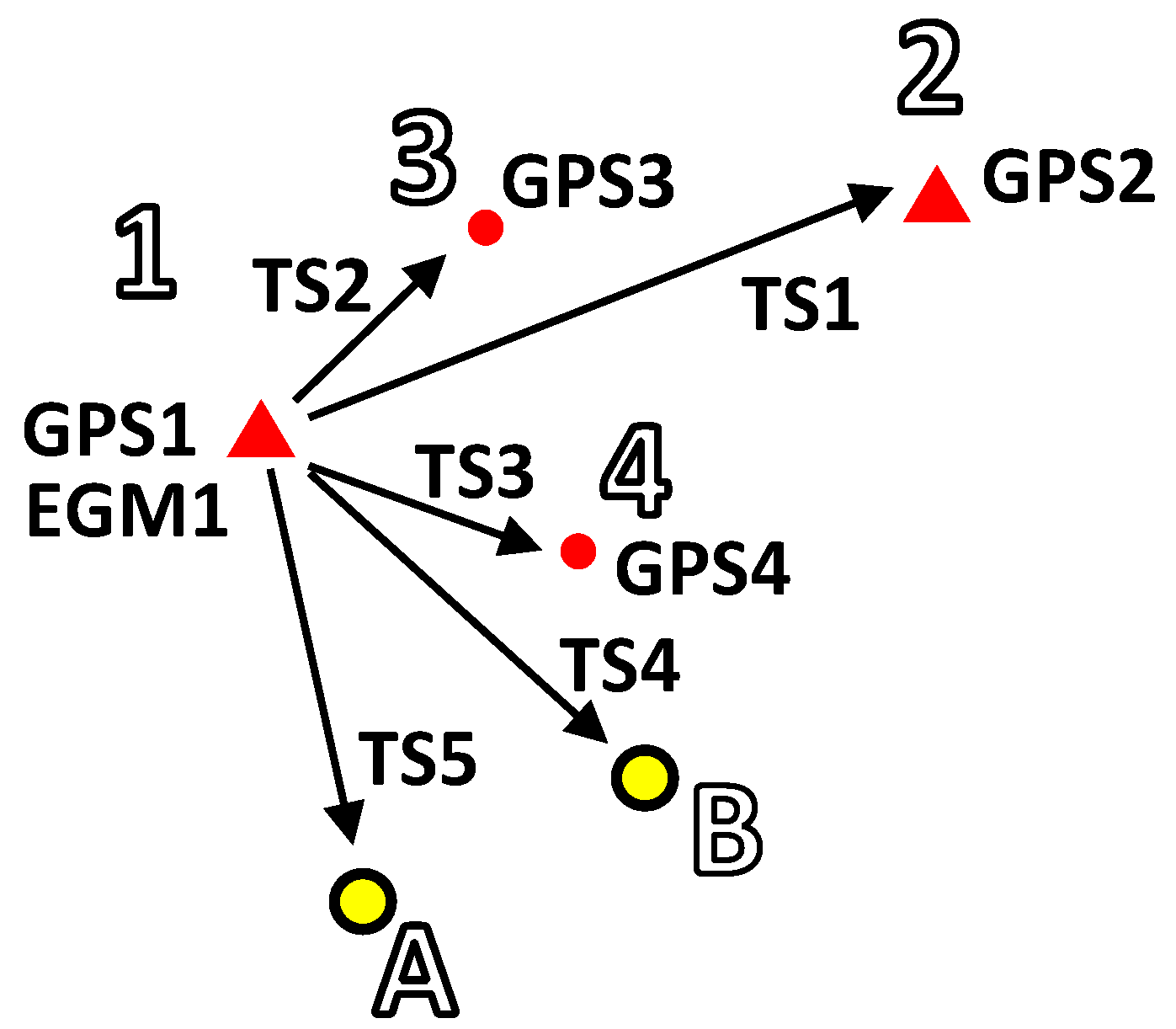
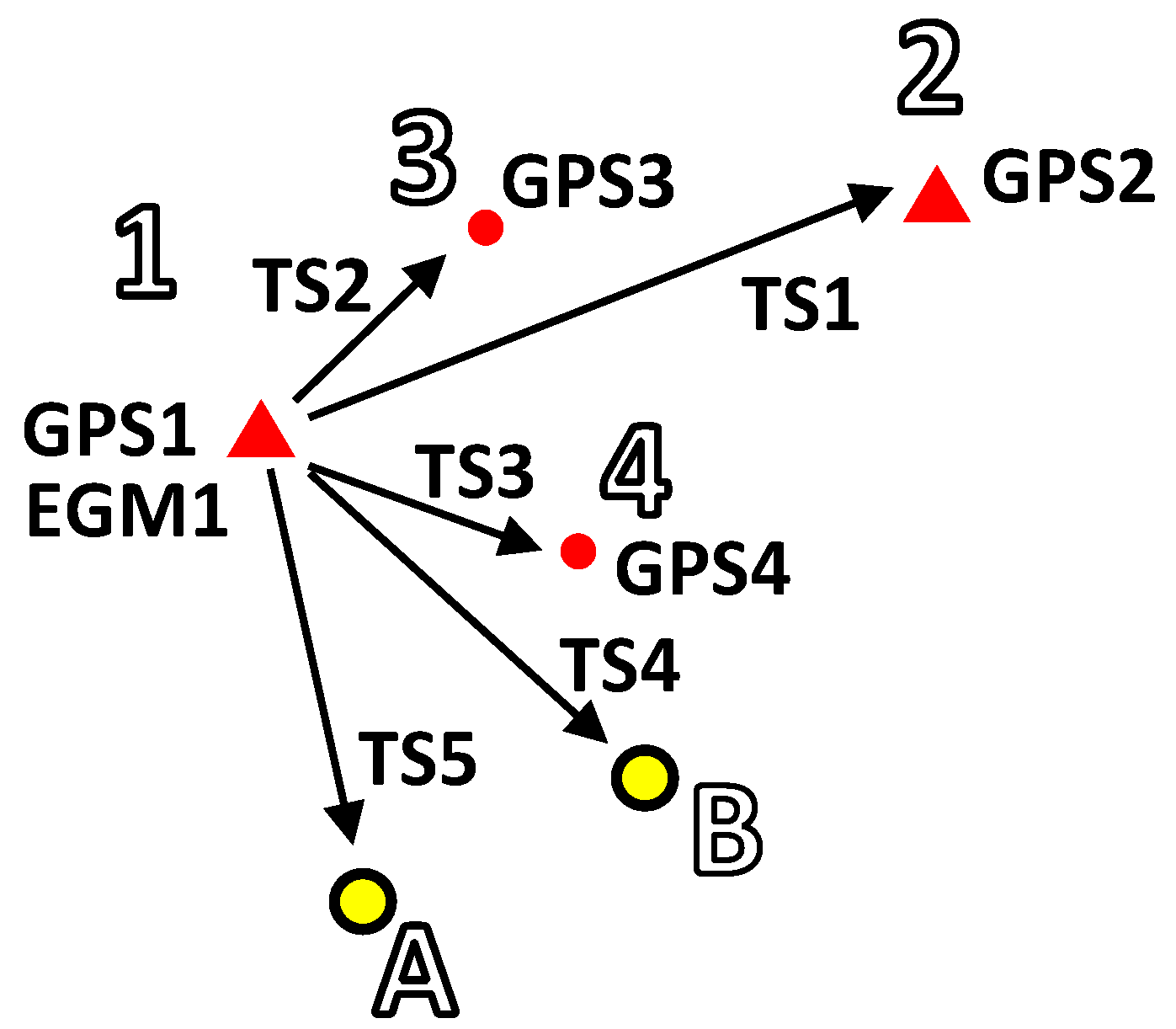
- is the vector of corrections to the approximate geocentric coordinates of the points 1, 2, 3, 4, A, B (e.g., ) and corrections to the approximate orientation angles of the total station ,
- is the vector of total station measurement random errors of the coordinates of the points 2, 3, 4, B, A, respectively (e.g., ); the GNSS measurements’ random errors of the coordinates of the points 1, 2, 3, 4, respectively (e.g., ); and the random errors of the deflection of the vertical components at the first total station position (at point 1): .
- is the known design matrix and free terms’ vector.
- is the vector of unknown corrections to all parameters adjusted on the first total station position, with zero expected value and a known covariance matrix .
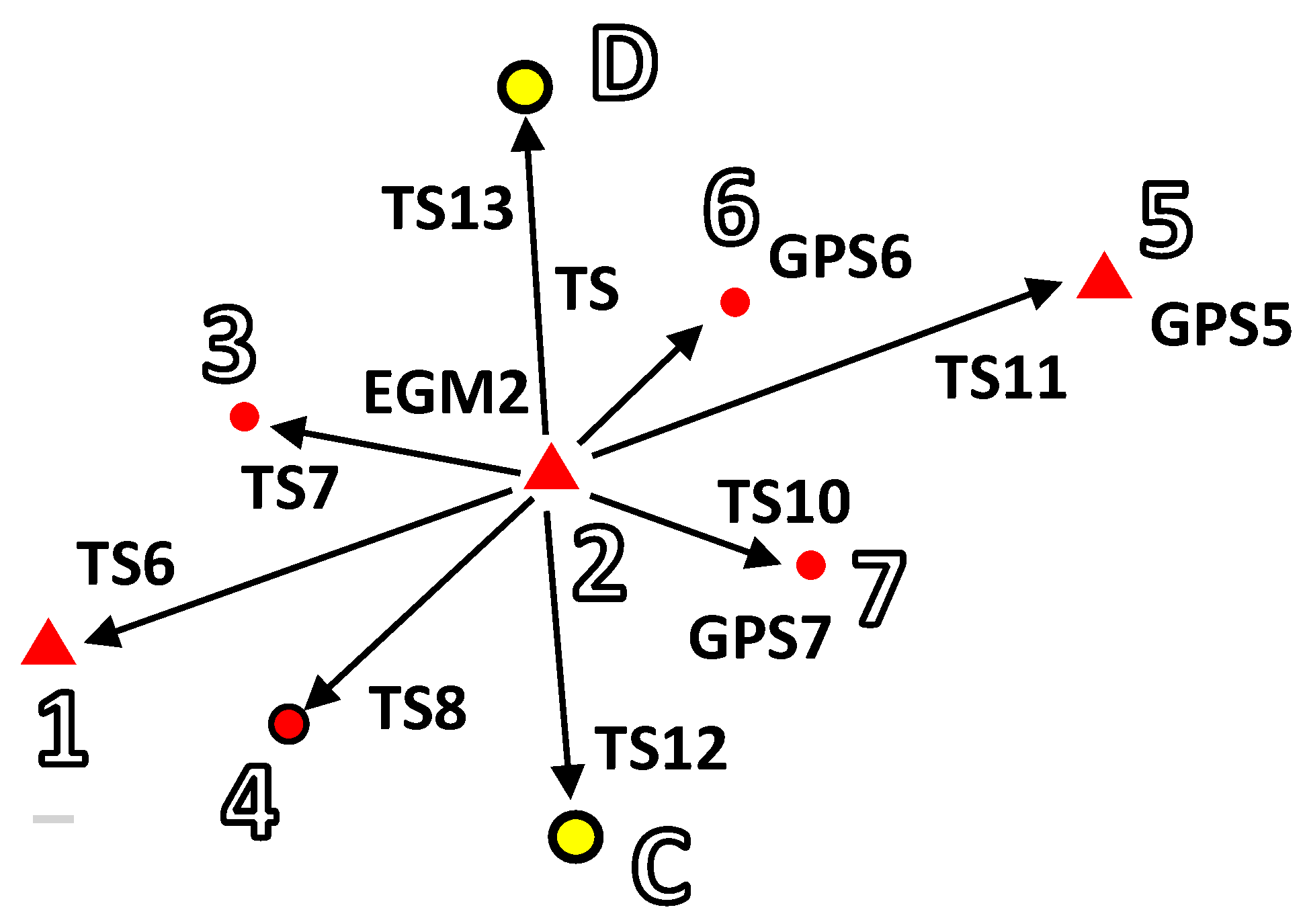
- is the vector of corrections to the approximate geocentric coordinates of the new points 5, 6, 7, C, D included in the model at the second total station position, and corrections to the total station orientation angles;
- is the vector of total station measurement random errors of the coordinates of the points 1, 3, 4, 6, 7, 5, C, D, respectively; the GNSS measurement’s random errors of the coordinates of the points 5, 6, 7, respectively; and the random errors of the deflection of the vertical components at the second total station position (at point 2): ;
- is the known design matrix and the free terms vector.
- is the vector of unknown corrections to all parameters adjusted on the second total station position, with zero expected value and a known covariance matrix:
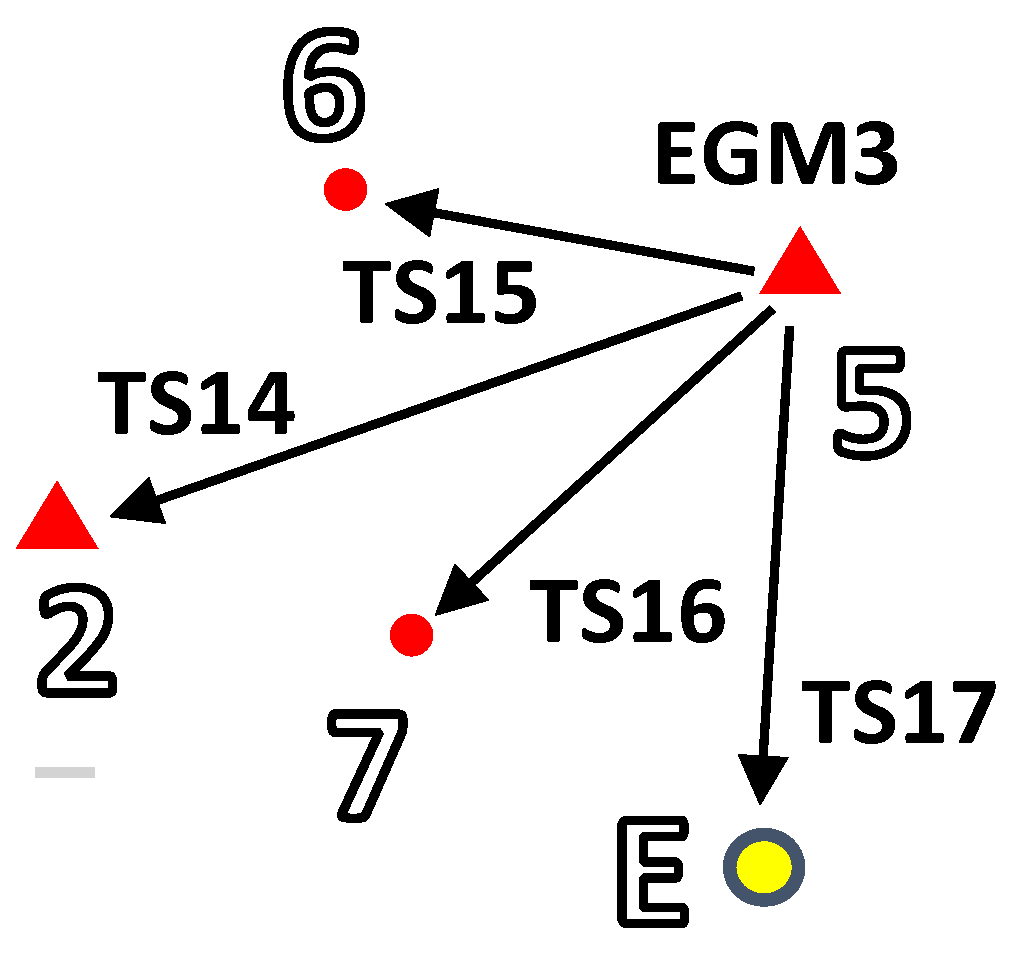
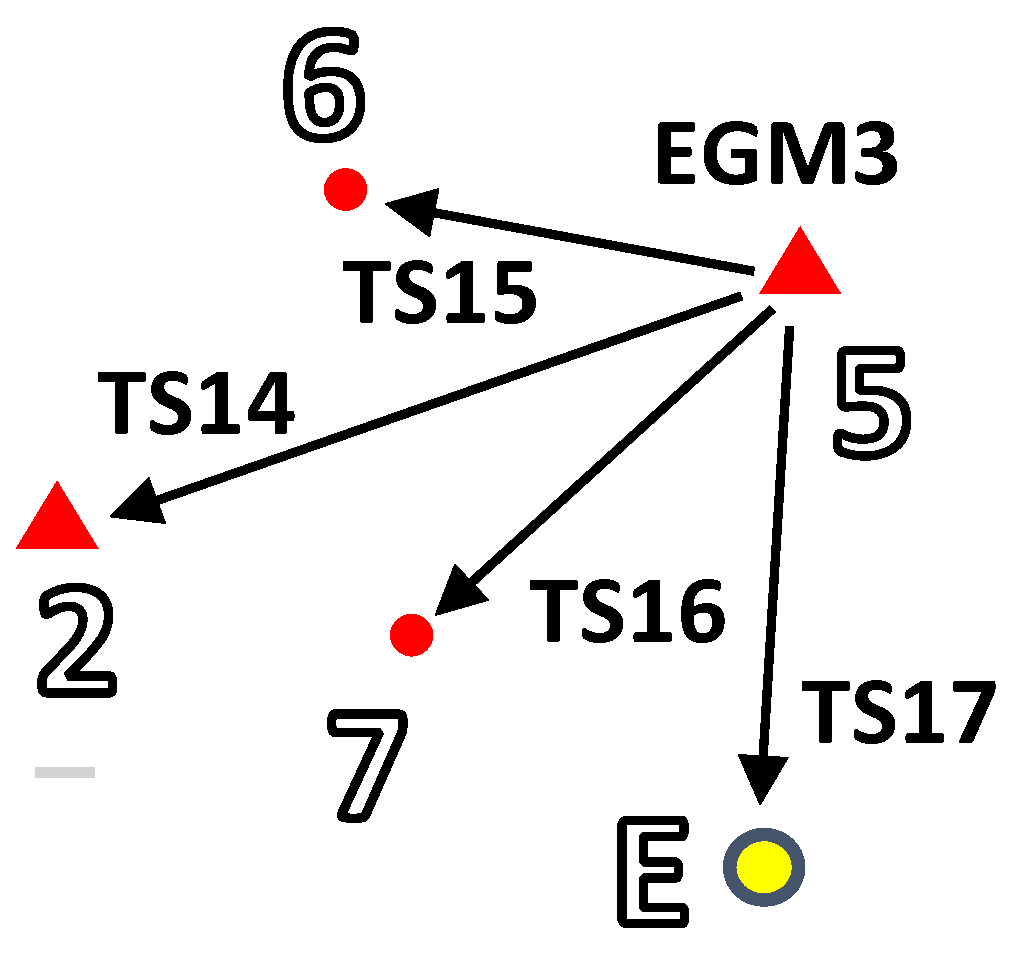
- is the vector of corrections to the approximate geocentric coordinates of the new point E included in the model at the third total station position, and corrections to the total station orientation angles;
- is the vector of total station measurement random errors of the coordinates of the points 2, 6, 7, E, respectively; and random errors of the deflection of the vertical components at the third total station position (at point 5): ;
- X, y is the known design matrix and free terms vector.
2.4.3. Sequential Online Adjustments of the Total Station Observations
3. Discussion
4. Conclusions
- The total station traverse is very well spatially oriented by using the total station vertical axe deflection from normal to GRS 80 ellipsoid components obtained from EGM, and by measuring the coordinates of the total station standpoint using a GNSS receiver. There is no need to carry out GNSS measurements at any additional merging total station traverse points.
- The proposed methods and algorithms of the sequential online adjustment of the total station positions and the sequential adjustment of the single total station vector of observations, including the GNSS and EGM data in both cases, work correctly. They deliver the same results as the classical offline adjustment of the total station traverse.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Flah, M.; Nunez, I.; Ben Chaabene, W.; Nehdi, M.L. Machine Learning Algorithms in Civil Structural Health Monitoring: A systematic review. Arch. Comput. Methods Eng. 2021, 28, 2621–2643. [Google Scholar] [CrossRef]
- Malekloo, A.; Ozer, E.; Al-Hamaydeh, M.; Girolami, M. Machine learning and structural health monitoring overview with emerging technology and high-dimensional data source highlights. Struct. Health Monit. 2022, 21, 1906–1955. [Google Scholar] [CrossRef]
- Yuan, F.-G.; Zargar, S.A.; Chen, Q.; Wang, S. Machine learning for structural health monitoring: Challenges and opportunities, Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems. Proc. SPIE 2020, 11379, 1137903. [Google Scholar] [CrossRef]
- Bao, Y.; Li, H. Machine learning paradigm for structural health monitoring. Struct. Health Monit. 2021, 20, 1353–1372. [Google Scholar] [CrossRef]
- Luhmann, T.; Robson, S.; Kyle, S.; Boehm, J. Close-Range Photogrammetry and 3D Imaging; De Gruyter: Berlin, Germany; Boston, MA, USA, 2013; pp. 4–18. ISBN 978-3-11-060725-3. [Google Scholar]
- Ullah, Z.; Al-Turjman, F.; Mostarda, L.; Gagliardi, R. Applications of Artificial Intelligence and Machine learning in smart cities. Comput. Commun. 2020, 154, 3123–3323. [Google Scholar] [CrossRef]
- Ud Din, I.; Guizani, M.; Rodrigues, J.J.P.C.; Suhaidi, H.; Korotaev, V.V. Machine learning in the Internet of Things: Designed techniques for smart cities. Future Gener. Comput. Syst. 2019, 100, 826–843. [Google Scholar] [CrossRef]
- Heunecke, O. Recent Impacts of Sensor Network Technology on Engineering Geodesy. In The 1st International Workshop on the Quality of Geodetic Observation and Monitoring Systems (QuGOMS’11); Kutterer, H., Seitz, F., Alkhatib, H., Schmidt, M., Eds.; International Association of Geodesy Symposia; Springer, Science&Business Media LLC: New York, NY, USA, 2015; Volume 140, pp. 185–195. [Google Scholar] [CrossRef]
- Karsznia, K.; Tarnowska, A. Proposition of an integrated geodetic monitoring system in the areas at risk of landslides. Chall. Mod. Technol. 2013, 4, 33–40. [Google Scholar]
- Hein, G.W. Integrated geodesy state-of-the-art, 1986 reference text. In Mathematical and Numerical Techniques in Physical Geodesy; Sünkel, H., Ed.; Lecture Notes in Earth Sciences; Springer: Berlin/Heidelberg, Germany, 1986; Volume 7. [Google Scholar] [CrossRef]
- Barzaghi, R.; Benciolini, B.; Betti, B. A numerical experiment of integrated geodesy. Bull. Geod. 1990, 64, 259–282. [Google Scholar] [CrossRef]
- Karsznia, K. A concept of surveying and adjustment of spatial tacheometric traverses in the applications of integrated geodesy. Acta Sci. Pol. Geod. Descr. Terr. 2008, 7, 35–46. [Google Scholar]
- Ranganathan, A. The Levenberg-Marquardt algorithm. Tutoral LM Algorithm 2004, 11, 101–110. [Google Scholar]
- Wrześniak, A.; Giordan, D. Development of an algorithm for automatic elaboration, representation, and dissemination of landslide monitoring data. Geomat. Nat. Hazards Risk 2017, 8, 1898–1913. [Google Scholar] [CrossRef]
- Dematteis, N.; Wrześniak, A.; Allasia, P.; Bertolo, D.; Giordan, D. Integration of robotic total station and digital image correlation to assess the three-dimensional surface kinematics of a landslide. Eng. Geol. 2022, 303, 106655. [Google Scholar] [CrossRef]
- Yuwono, B.D.; Prasetyo, Y. Analysis Deformation Monitoring Techniques Using GNSS Survey and Terrestrial Survey (Case Studi: Diponegoro University Dam, Semarang, Indonesia). IOP Conf. Ser. Earth Environ. Sci. 2019, 313, 012045. [Google Scholar] [CrossRef]
- Gargula, T. Adjustment of an Integrated Geodetic Network Composed of GNSS Vectors and Classical Terrestrial Linear Pseudo-Observations. Appl. Sci. 2021, 11, 4352. [Google Scholar] [CrossRef]
- Qian, S.; Qian, S.; Xiaa, J.; Fosterb, J.; Falkmerc, T.; Hoe, L. Pursuing Precise Vehicle Movement Trajectory in Urban Residential Area Using Multi-GNSS RTK Tracking. Transp. Res. Procedia 2017, 25, 2356–2372. [Google Scholar]
- Linder, W. Digital Photogrammetry—Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2003; pp. 23–38. ISBN 978-3-662-06725-3. [Google Scholar]
- Karsznia, K.; Osada, E. Photogrammetric Precise Surveying Based on the Adjusted 3D Control Linear Network Deployed on a Measured Object. Appl. Sci. 2022, 12, 4571. [Google Scholar] [CrossRef]
- Condorelli, F.; Morena, S. Integration of 3D modelling with photogrammetry applied on historical images for cultural heritage. VITRUVIO—Int. J. Archit. Technol. Sustain. 2023, 8, 58–69. [Google Scholar] [CrossRef]
- Robleda, P.G.; Ramos, P.A. Modeling and accuracy assessment for 3D-virtual reconstruction in cultural heritage using low-cost photogrammetry: Surveying of the Santa Maria Azogue church’s front. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, XL-5/W4, 263–270. [Google Scholar] [CrossRef]
- Osada, E. Geodesy; Publishing House of the Wroclaw University of Technology: Wroclaw, Poland, 2002; pp. 161–209. [Google Scholar]
- James, R. Geodetic Calculations and Applications; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2017; pp. 89–91. ISBN 978-1547266562. [Google Scholar]
- Osada, E.; Sergieieva, K.; Lishchuk, V. Improvement of the total station 3D adjustment by using precise geoid model. Geod. Cartogr. 2010, 59, 3–12. [Google Scholar]
- Eshagh, M.; Ebadi, S. Geoid modelling based on EGM08 and recent Earth gravity models of GOCE. Earth Sci. Inf. 2013, 6, 113–125. [Google Scholar] [CrossRef]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer Science & Business Media LLC: New York, NY, USA, 2006; pp. 101–104. ISBN 978-0387303031. [Google Scholar]
- Osada, E.; Owczarek-Wesołowska, M.; Ficner, M.; Kurpiński, G. TotalStation/GNSS/EGM integrated geocentric positioning method. Surv. Rev. 2017, 49, 206–211. [Google Scholar] [CrossRef]
- Osada, E.; Sośnica, K.; Borkowski, A.; Owczarek-Wesołowska, M.; Gromczak, A. A direct georeferencing method for terrestrial laser scanning using GNSS data and the vertical deflection from global Earth gravity models. Sensors 2017, 17, 1489. [Google Scholar] [CrossRef]
- Osada, E.; Owczarek-Wesołowska, M.; Sośnica, K. Gauss–Helmert Model for Total Station Positioning Directly in Geocentric Reference Frame Including GNSS Reference Points and Vertical Direction from Earth Gravity Model. J. Surv. Eng. 2019, 145, 04019013. [Google Scholar] [CrossRef]
- Fahrmeir, L.; Kneib, T.; Lang, S.; Marx, B. Regression: Models, Methods and Applications; Springer: Berlin/Heidelberg, Germany, 2013; pp. 69–70. [Google Scholar]
- Eshagh, M. Sequential Tikhonov Regularization: An alternative way for inverting satellite gradiometric data. ZfV 2011, 136, 113–121. [Google Scholar]
- Osada, E. Adjustment of the total station data in real time. Bolletino Di Geod. Et Sci. Affin. 1996, 55, 121–130. [Google Scholar]
- Jeudy, L.M.A. Generalyzed variance-covariance propagation law formulae and application to explicit least-squares adjustments. Bull. Geod. 1988, 62, 113–124. [Google Scholar] [CrossRef]
- Rapp, R.H. Geometric Geodesy Part II; The Ohio State University, Department of Geodetic Science and Surveying: Columbus, OH, USA, 1993; p. 84. [Google Scholar]
- Leica Flex Line TS02 Plus, Data Sheet; Leica Geosystems AG: Heerbrugg, Switzerland, 2013; Available online: https://www.leica-geosystems.com (accessed on 15 July 2023).
- Leica GS 10, Data Sheet; Leica Geosystems AG: Heerbrugg, Switzerland, 2015; Available online: https://www.leica-geosystems.com (accessed on 15 July 2023).
- Hirt, C. Prediction of vertical deflections from high-degree spherical harmonic synthesis and residual terrain model data. J. Geod. 2010, 84, 179–190. [Google Scholar] [CrossRef]
- Osada, E.; Trojanowicz, M. Joint total-station and GPS positioning with the use of digital terrain and gravity models. Geod. I Kartogr. 1999, XLVIII, 39–46. [Google Scholar]
- Eshagh, M.; Berntsson, J. On quality of NKG2015 geoid model over the Nordic countries. J. Geod. Sci. 2019, 9, 97–110. [Google Scholar] [CrossRef]
- Eshagh, M.; Zoghi, S. Local error calibration of EGM08 geoid using GNSS/levelling data. J. Appl. Geophys. 2016, 130, 209–217. [Google Scholar] [CrossRef]
- Eshagh, M.; Ebadi, S. A strategy to calibrate errors of Earth gravity models. J. Appl. Geophys. 2014, 103, 215–220. [Google Scholar] [CrossRef]
- Eshagh, M. Numerical aspects of EGM08-based geoid computations in Fennoscandia regarding the applied reference Surface and error propagation. J. Appl. Geophys. 2013, 96, 28–32. [Google Scholar] [CrossRef]
- Eshagh, M. On the reliability and error calibration of some recent Earth’s gravity models of GOCE with respect to EGM08. Acta Geod. Geophys. Hung. 2013, 48, 199–208. [Google Scholar] [CrossRef]
- Eshagh, M. Error calibration of quasi-geoid, normal and ellipsoidal heights of Sweden using variance component estimation. Contr. Geophys. Geod. 2010, 40, 1–30. [Google Scholar] [CrossRef]
- Kiamehr, R.; Eshagh, M. Estimation of variance components Ellipsoidal, Geoidal and orthometrical heights. J. Earth Space Phys. 2008, 34, 1000318. [Google Scholar]
- Trojanowicz, M.; Osada, E.; Karsznia, K. Precise local quasigeoid modelling using GNSS/levelling height anomalies and gravity data. Surv. Rev. 2018, 52, 76–83. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Point No. | ξ-Component [arc sec ″] | η-Component [arc sec ″] | ∑ [grad] |
|---|---|---|---|
| 1 | 5.9926 | 6.2033 | 209.0750 |
| 2 | 5.9852 | 6.1967 | 296.7144 |
| 5 | 5.9775 | 6.1896 | 50.2572 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Karsznia, K.; Osada, E.; Muszyński, Z. Real-Time Adjustment and Spatial Data Integration Algorithms Combining Total Station and GNSS Surveys with an Earth Gravity Model. Appl. Sci. 2023, 13, 9380. https://doi.org/10.3390/app13169380
Karsznia K, Osada E, Muszyński Z. Real-Time Adjustment and Spatial Data Integration Algorithms Combining Total Station and GNSS Surveys with an Earth Gravity Model. Applied Sciences. 2023; 13(16):9380. https://doi.org/10.3390/app13169380
Chicago/Turabian StyleKarsznia, Krzysztof, Edward Osada, and Zbigniew Muszyński. 2023. "Real-Time Adjustment and Spatial Data Integration Algorithms Combining Total Station and GNSS Surveys with an Earth Gravity Model" Applied Sciences 13, no. 16: 9380. https://doi.org/10.3390/app13169380
APA StyleKarsznia, K., Osada, E., & Muszyński, Z. (2023). Real-Time Adjustment and Spatial Data Integration Algorithms Combining Total Station and GNSS Surveys with an Earth Gravity Model. Applied Sciences, 13(16), 9380. https://doi.org/10.3390/app13169380