Abstract
The development of hybrid unmanned aerial underwater vehicles (HAUVs) compatible with the advantages of the aerial vehicles and the underwater vehicles is of great significance. This paper presents the first study on a new HAUV layout using four rotors to realize the medium crossing motion of a transverse slender body similar to the fuselage of a missile or a submarine, that is, the hybrid aerial underwater quadrotor (HAUQ). Then, a robust control strategy is proposed for the take-off HAUQ on the water in the presence of unknown disturbances and complex model dynamic uncertainties. As a semi-submersible HAUQ rises straight from the water, the inside of the slender fuselage placed horizontally is filled with water. The center of the mass, the moment of inertia, and the arm of the force of the HAUQ will change rapidly in the take-off phase from the water because of the rapid nonuniform change in mass caused by the passive fast drainage. It is difficult to establish an accurate mathematical model of the complex dynamic changes caused by the multi-media dynamics, the fast changing buoyancy, and the added mass crossing the air–water surface. Therefore, an uncertain kinematic and dynamic model is established through the passive, fast, nonuniform change and the complex dynamics are considered as the unknown terms, and the external disturbances of gust and other factors are assumed as the bounded disturbance input. A robust design approach is introduced to deal with the fast time-varying mass disturbance based on the input-to-state stability (ISS) theorem. The complex dynamics are estimated using the basis function and the unknown weight parameters, and the adaptive laws are adopted for the on-line estimation of the unknown weight parameters. Considering the residual disturbance of the uncertain nonlinear system as a total disturbance term, a disturbance observer is introduced for disturbance observation. The numerical simulation shows the feasibility and robustness of the proposed algorithm.
1. Introduction
A great amount of significant research has been made in the last decades with the development of advanced robotic systems, especially about autonomous underwater vehicles (AUVs) and unmanned aerial vehicles (UAVs). As AUVs and UAVs are good at completing their tasks in their respective fields, they can efficiently achieve marine and aerial observations and attack missions, respectively. However, when faced with a multi-domain task, it seems impossible to accomplish the mission whether AUVs or UAVs. The heterogeneous multi-robot systems have been used to accomplish multi-domain environment monitoring [1,2,3]. And the multi-robot cooperation enriches the observation and improvement in work efficiency. Nevertheless, some new challenges are brought by using such a multi-robot system for users. The difficulties of establishing and maintaining may create multi-robot system operational difficulties. What is more, it is extremely difficult for the heterogeneous robots working in the different types of medium to communicate with each other because of the attenuation effect of water for the electromagnetic waves. Therefore, a single platform, that is, the hybrid aerial underwater vehicle (HAUV) which can be capable of moving in both air and water, is needed to be developed to complete multi-domain missions.
Because of the huge differences in the physical properties between air and water, it is a great challenge to design an HAUV capable of both air flight and underwater navigation, especially the efficient control technique. According to the existing literature, many vehicles of various layouts such as fixed-wing [4,5,6], variable-swept wing [7], flapping wing [8], and multi-rotor systems [9,10,11,12] have been adopted for aerial and underwater missions, which have shown the high practical value and fruitful results. And the controllability, payload, and practicality of HAUVs has been assessed [13].
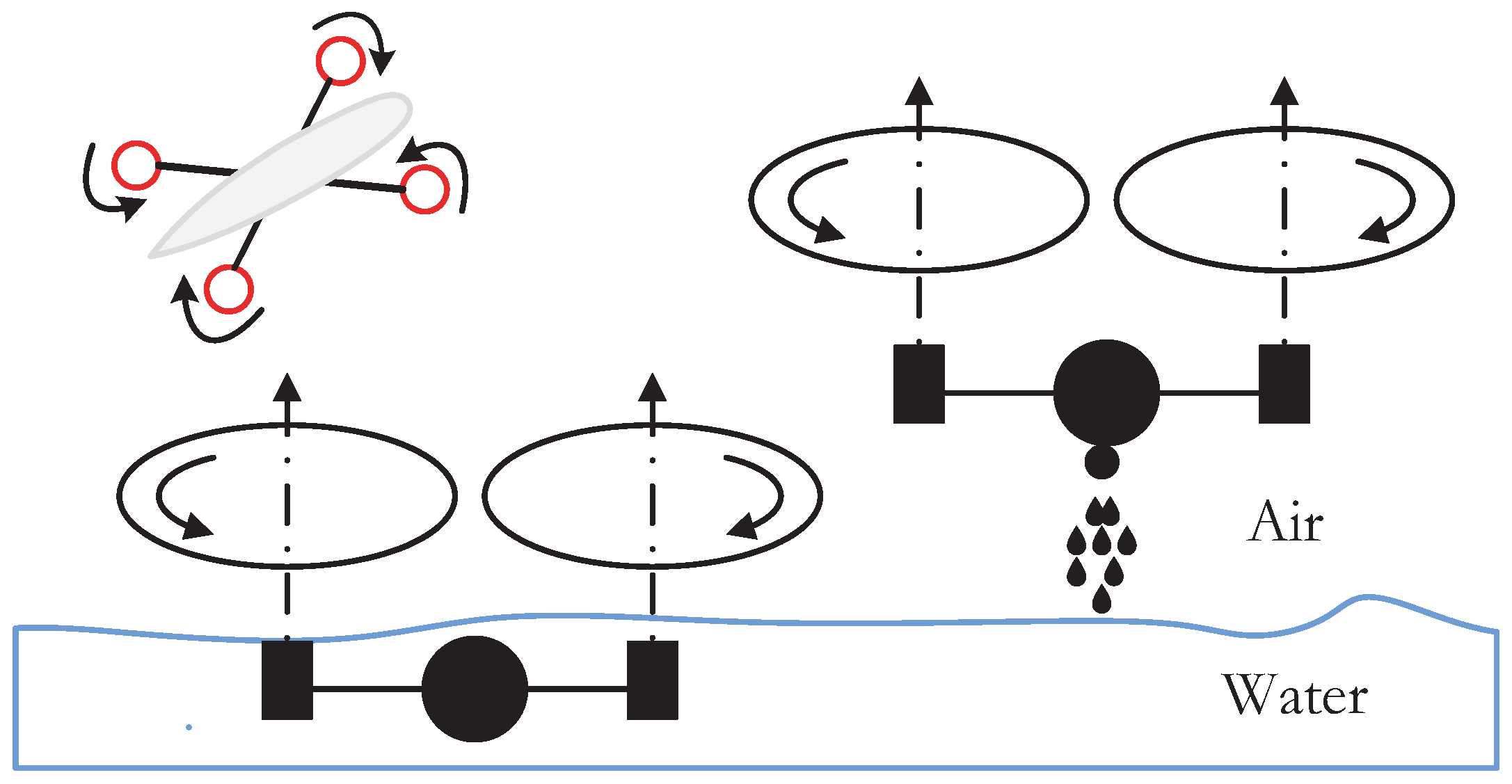
However, the existing layouts of HAUVs are not compatible with the advantages of the aerial vehicles and the underwater vehicles. A transverse permeable slender body similar to the fuselage of a missile or a submarine is a suitable scheme for the fuselage of HAUVs. Then, a new HAUV layout is proposed which uses four rotors to realize the medium crossing motion of a transverse slender body similar to the fuselage of a missile or submarine, that is, the hybrid unmanned aerial underwater quadrotor (HAUQ) as shown in Figure 1. The HAUQ layout can help to use the morphing wing technology and the fixed-wing hybrid quadrotor technology to realize the underwater streamlined fuselage navigation and the fixed-wing flight. The key of the whole flight process is the trans-media motion control from water to air.
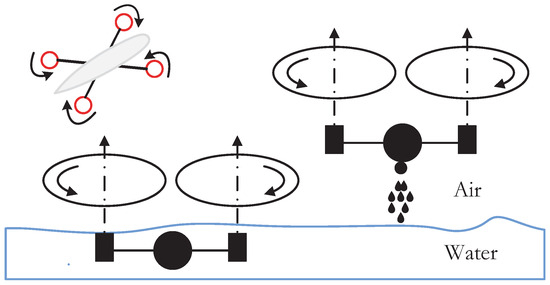
Figure 1.
Take-off for a semi-submersible hybrid aerial underwater quadrotor on the water.
The controller design of the hybrid aerial underwater quadrotor (HAUQ) is a typical gas–liquid coupling problem. The water–air interface crossing motion has strong nonlinearities and uncertainties, such as the multivariable strong couplings, the nonlinear hydrodynamic characteristics of the water–air two-phase flow, the impact of water waves, the gust, and the passive drainage disturbance. For the HAUV, it includes the water–air transition section and the air–water transition section. To realize the stable and reliable conversion between the discontinuous media, the control scheme of the HAUV is one of the key issues of the cross-medium motion. The control models and the control arithmetics of the existing vehicles including the surface vessel and the underwater vehicle have some limitations and strong disturbances such as winds, waves, and currents which will challenge the control issues. For the marine environment interference, most of the research objects are underwater vehicles. The influence of the ocean current is studied on the motion control of the low-speed AUV [14]. A robust navigation algorithm is developed for the recovery of AUVs [15]. For the operability of an AUV, the least square method is introduced to estimate the ocean current [16]. However, the research on the modeling and control algorithm design of the trans-media motion in a complex environment is extremely rare.
For the control design problem of the water-to-air transition motion process of HAUQs, a water–air crossing motion control design scheme is proposed based on the lift provided by four rotors. The basic idea of the control algorithm of the HAUQ is to use four rotors in the air to pull up the streamlined body which is submerged in the water and drain the water inside the body in a short time. The traditional four-rotor UAVs is the most common and representative UAV in a multi-rotor system, and it is a multiple-input and multiple-output nonlinear system, including the nonlinearities, the multiple variables, the underactuated characteristics, the weak anti-jamming ability, and the complex couplings [17,18]. The HAUQ inherits these characteristics.
The HAUQ is facing a flight environment different from the traditional quadrotor UAV. When the permeable slender body of the HAUQ crosses from water to air, the medium changes, and there are many complex changes whose mechanism is not clear enough, such as the additional mass caused by the fast drainage, the multi-media dynamics, and the fast-changing buoyancy. And the body is filled with water and needs to be discharged in a very short time such that the mass of the whole HAUQ changes dramatically when it takes off from the water to the air. The nonuniform drainage will also cause the change in the center of mass and the arm of force. The main contributions of the manuscript can be summarized as follows:
- A new water–air trans-medium pattern is proposed for the HAUQ with a permeable slender body. Compared with the existing layouts of the HAUVs, the HAUQs with a permeable slender body can help to keep the streamlined fuselage needed for underwater and air navigation.
- A general mathematical model is established for HAUQs by employing the Newton–Euler formulation as the factors exist, including the strong uncertainties caused by the fluid dynamics in the complex water–air mixed environment, the fast time-varying added mass caused by the fluid dynamics and the residual water inside the slender body, the influence of the passive drainage, and the external disturbance.
- A disturbance observer-based robust control scheme is proposed for HAUQs. The robust control is adopted to compensate for the fast time-varying mass uncertainty. For the uncertainties of the multi-media complex dynamics modeling on the position and attitude dynamic equations, it is estimated by considering it as a combination of the specific basis functions, and an adaptive method is used to estimate the unknown weight parameters. The rapid and uncontrollable drainage will cause the mass and the center of mass to change during take-off on the water surface. Meanwhile, the length of the arm of force and the moment of inertia matrix will change unpredictably, and they are considered as the bounded uncertainty of the moment of inertia matrix and the force arm variation. Then, a comprehensive dynamic disturbance term is formed together with the bounded additional disturbances, and a disturbance observer structure in [19] is introduced to estimate it under the assumption that the total disturbance is measurable. The idea of using a disturbance observer to estimate the system disturbances is to introduce feedforward compensation in the process of controller design to improve the control performance of the system, and it is widely used in aircraft control [20,21,22,23,24,25,26,27,28,29]. The input-to-state stability theorem is an effective method to study nonlinear systems with noises and disturbances [30]. This method can obtain the bounded states by suppressing the bounded disturbances; therefore, the stability of the position and attitude control of the HAUQ is analyzed by the input–state stability theorem. Finally, a nonlinear robust control algorithm is proposed consisting of three parts: a nonlinear robust take-off controller for HAUQs, an adaptive control law, and a disturbance observer. The simulation results show the effectiveness of the proposed algorithm.
The organization of this paper is as follows. Section 2 presents the kinematic equations with the uncertainties of the hybrid aerial underwater quadrotor in different coordinate systems. The design of the position controller and attitude controller as well as their stability analysis is discussed in Section 3. Finally, the controllers designed in this paper are tested via simulation in Section 4.
2. Mathematical Model
2.1. Dynamic Model of Water Surface Take-Off in Body Coordinate System
The take-off of an HAUQ on the water surface mainly refers to the process that as the HAUQ body is totally or partially submerged in the water medium, the pulling force generated by the rotation of the quadrotor pulls it out of the water and drains the residual water in the body. In order to establish the dynamic equation of an HAUQ, the inertial coordinates of water–air integration are established. In this coordinate system, a point on the water surface where the flight path is located is the reference system origin. Any direction of the water surface is taken as the positive direction. The -axis is perpendicular to the water surface and upward. The water depth is negative, and the height is positive. The is perpendicular to the plane and determined by the right-hand rule. Define the body coordinate system as . is the velocity transform matrix from coordinate system to coordinate system . Define the HAUQ position as which represents the position of the trans-media UAV in the inertial coordinates . The flight attitude is and represents the roll angle, the pitch angle, and the yaw angle, respectively. is the velocity component in the body coordinate system. is the angular velocity in the body coordinate system. Let the mass of the HAUQ without water be M, and the mass of the HAUQ is during the take-off process on the water surface. caused by the fast drainage holds and changes rapidly. It is worth noting that the does not include the added mass caused by underwater navigation, which is considered as the uncertainty. The rapid mass change also brings about the change in the center of mass position and the moment of inertia. The moment of inertia matrix is defined as .
We have
where
From Newton’s laws of motion, we have Equation (3),
where represents the change in the extra mass during the drainage process of cross-medium flight, is the change in the arm of force caused by the change in the mass center, is the change moment of inertia with time t, and and are the unknown terms including forces and moments caused by the complex multi-media dynamics and the fast-changing buoyancy. , , and during the fast drainage. is the external disturbance. Define and
Then, Equation (3) can be given by
where l is the distance between the propeller axis and the mass center of the HAUQ when it is not in water, and is a constant number determined by the characteristics of the rotor motor.
2.2. Dynamic Model of Water Surface Take-Off in Inertial Coordinate System
In this section, the dynamic model established in the body coordinate system is transformed into the water–air integrated inertial coordinate system for the convergence of controller design. Let be a transformation matrix from to , and the dynamic equation of the HAUQ in the coordinate system can be written as
So, there is
Then,
According to the property of the orthogonal matrix, we have
In addition, is given by
Thus,
In summary, the dynamic equation of the HAUQ in the water–air integrated inertial coordinate system is
It can seen from Equation (10) that the HAUQ also has four independent inputs compared with the traditional quadrotor, but it has six degrees of freedom, , , , , , and . There exists complex coupling relations between states. The sudden change in the medium causes the complex forces and the additional mass which change quickly in a short time.
3. Nonlinear Robust Control Laws
3.1. Control Model of Water Surface Take-Off
It is necessary to simplify the dynamic model before designing the control law. Firstly, let the moment of inertia matrix be
Consider the small angle of the HAUQ, and the dynamics can be rewritten as
where and are unknown terms. , , and are time-varying variables. and are bounded disturbances. Note that the small-angle assumption is reasonable, because the HAUQ needs to move horizontally with a slight incline to ensure its stability such that the water inside the body can not shake violently and the high-speed rotating propellers are not damaged by water. The HAUQ control system is divided into the position control subsystem and the attitude control subsystem, that is,
where
As we use the small-angle assumption, the take-off process actually involves some actual physical constraints. Therefore, the following assumption is considered as well.
Assumption 1.
The water’s surface keeps flat as the HAUQ flies from water to air.
Assumption 1 actually means that the modeling and impact of waves is not considered, and some tiny waves can be considered as the disturbance under the condition of tolerant performance of the proposed controller, and it is also an acceptable assumption about the flight environment.
3.2. Robust Adaptive Position Controller Water–Air Crossing
The trans-media flight adopts the strategy of slowly climbing to a certain height to drain water. Make the desired position point, and then . Define , . Subsystem is written as
where and holds. Assume that the independent element in can be written as a combination of N basis functions as follows,
where is the unknown constant parameter vector and is the high-order component, and
is a known regression vector. Define and , and subsystem is given by
The additional mass is time-varying but satisfies , where is the maximum value of the additional mass. The robust adaptive control law is given by
where , , , , and are the positive constants.
Theorem 1.
For the closed-loop system with (17) and the robust adaptive control law (18), choose the appropriate parameters , , , and
Consider the controller and the adaptive law (18), and the closed-loop system of system (17) and error are input-to-state stable (ISS).
Proof of Theorem 1.
Consider the following Lyapunov function,
where is the parameter estimation error. Then, the derivative of V is
Substituting the virtual control law into Equation (20), we have
According inequalities are
We have
Substituting into (23), Equation (23) is written as
where
Because of Young’s inequality
and , define , and then
According to the property of the vector product,
Thus,
Substituting the adaptive law into (29), we have
Because , let
Then,
Thus,
Therefore, we have
We obtain
Therefore,
Define
Equation (29) is given by
Apply the equation
to obtain
where , , and
Solving the differential Equation (33), we obtain
Define , and then we have
where and . According to the definition of input–state stability, the whole position closed-loop system is ISS. Furthermore, if the uncertainty is small or does not exist, that is, , we have , and the closed-loop is exponentially stable. □
Denoting and , we have
Calculate the desired attitude angle command and the total force output through .
3.3. Nonlinear Attitude Controller Based on Disturbance Observer
Consider the subsystem , and define and , and we have
Denote . It is assumed that the unknown terms caused by the multi-media dynamics can be rewritten as a combination of M basis functions , and we obtain
where is the unknown constant and is the higher-order component, and
is the known regression vector. Subsystem can be rewritten as
where
indicates the total disturbance. Define where is the virtual control law.
Equation (41) can be given by
Then, we can design the attitude controller and obtain the main results.
Assumption 2.
Assume is bounded, and there exists an unknown constant such that .
The observer design method in [19] is introduced to estimate the total uncertainty and the adaptive estimate error . Denote
Assume is the estimate of , and the observer is given by
Denoting the observer error and , the error equation is given by
Furthermore, an error state-space equation is constructed as follows:
Define and
Then, we have
Assume and the control law can be given by
where , , and are the positive constants. Therefore, the following theorem can be obtained.
Theorem 2.
For the closed-loop system of the attitude error Equation (41), the state observer error Equation (44), the disturbance error Equation (47), and the adaptive estimate error, if there exists constants and , and matrices such that
The closed-loop system is input-to-state stable with the disturbance observer (43) and the robust adaptive controller (48). If all disturbances and uncertainties disappear, the closed-loop system is exponentially stable.
Proof of Theorem 2.
For convenience of the stability analysis, denote and with which is a small constant number. Equation (47) can be rewritten as
Then, we redefine the error term as follows:
Equation (52) is given by
Choose the Lyapunov function as
where , and the time derivative of the Lyapunov function is
Substituting into (54), we have
Using in (55), then we obtain
where and , . Substituting inequalities
into (55), Equation (58) is rewritten as
Because
Thus,
Use the adaptive law , and we obtain
Term can be rewritten as
Because
Then, we have
where , , and
With the integral on both sides of inequality (64), then we have
Define , and we have
where and , . Therefore, the closed-loop system is ISS. Moreover, if the uncertainty does not exist, that is, , the closed-loop system is exponentially stable. □
Through the term which includes the unmodeled dynamics, the external disturbance, and the higher-order characteristics, the disturbance observer (43) can improve the robustness of the system without the accurate model for estimating objects.
4. Simulation Results
In this section, a numerical simulation of an HAUQ is presented to verify the effectiveness of the proposed position and attitude control algorithm and the observer strategy using the MATLAB platform. Design a water–air crossing flight scene in which the center of gravity of the HAUQ comes out of the water from point and climbs to point to drain the water inside the body. Then, the control effect of the proposed position and attitude control algorithm and the disturbance observer are verified. The design parameters of the HAUQ are given by
and the fundamental moment of inertia matrix is
Assume that the disturbance change caused by a large amount of water in the slender body is
The unmodeled items of the complex dynamics of the HAUQ are composed of state variable feedback, the wave disturbance signal, and the random noise which are given by
where is a Gaussian random signal with the standard deviation , the mean value 0, and the variance 1. is also a Gaussian random signal with the standard deviation , the mean value 0, and the variance 1. For the unknown uncertainty caused by complex dynamics, the polynomial regression method is adopted and the adaptive law is used to estimate the unknown weight. Define , , , and , where the position feedback estimation after dividing by 1000 is used to estimate the uncertainty to avoid the large initial values. The basis functions are given by
The unknown matrix and are estimated though the adaptive laws (18) and (48). The estimate of and is
The disturbance caused by extra factors such as gusts is assumed as
The gain parameter matrix of the control law and the adaptive control law are given by
Denote , solve the linear matrix inequalities (LMI) (49), and we can obtain a proper where is the identity matrix. In the simulation, the initial value of P is and the others are 0. The simulation results are shown in Figure 2, Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7.
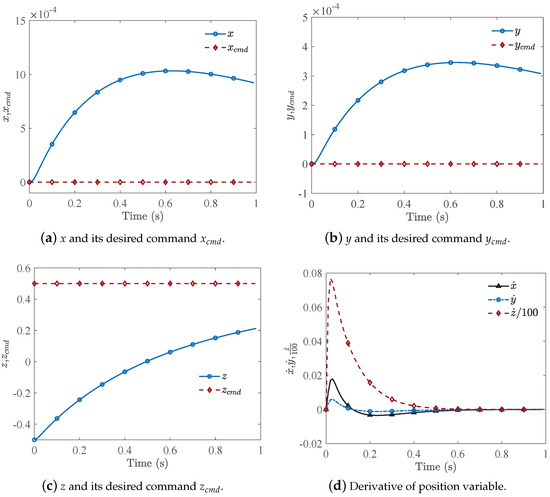
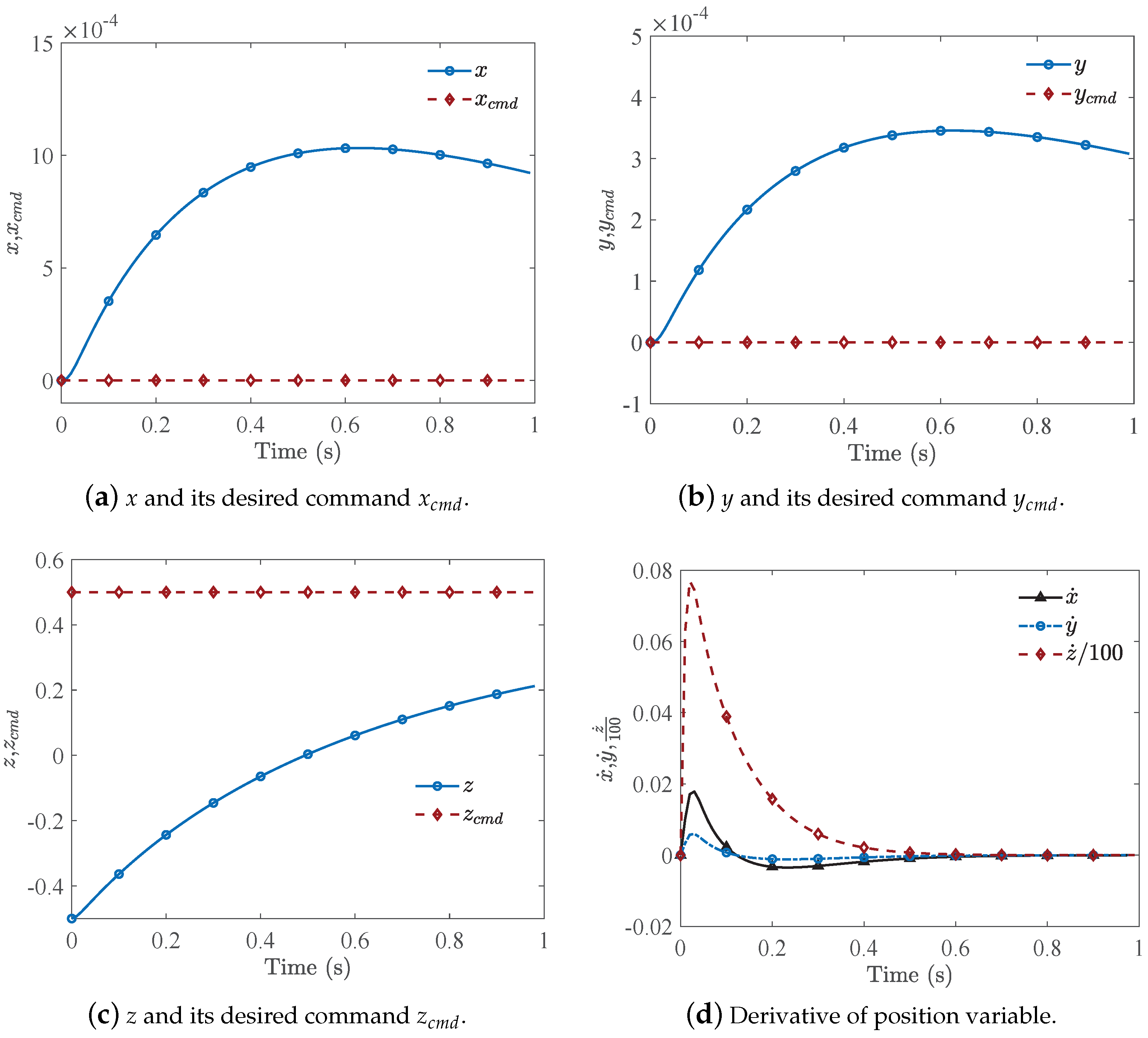
Figure 2.
Position state variables of the hybrid aerial underwater quadrotor.
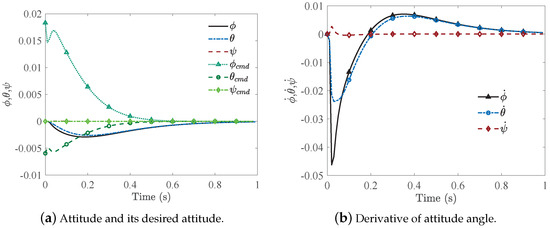
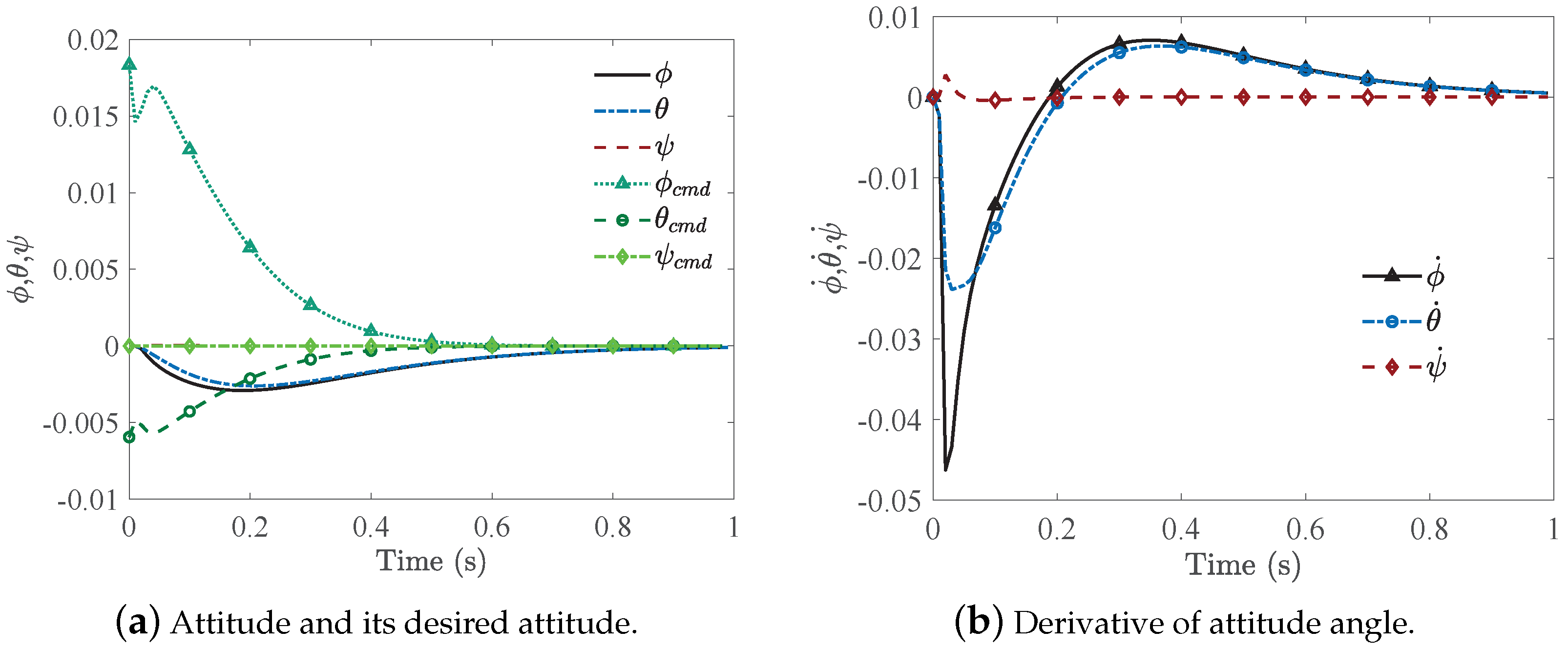
Figure 3.
Attitude state variable of the hybrid aerial underwater quadrotor.
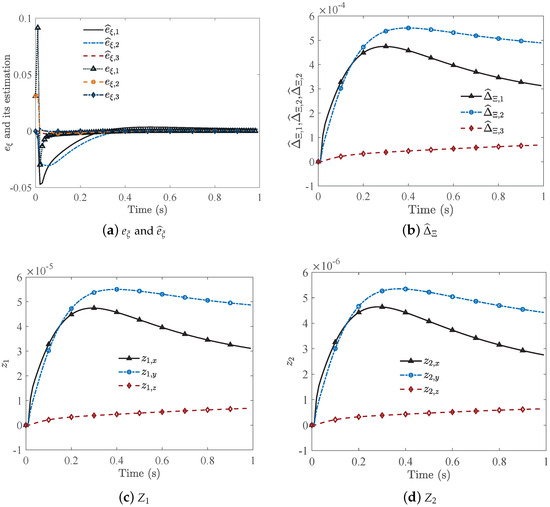
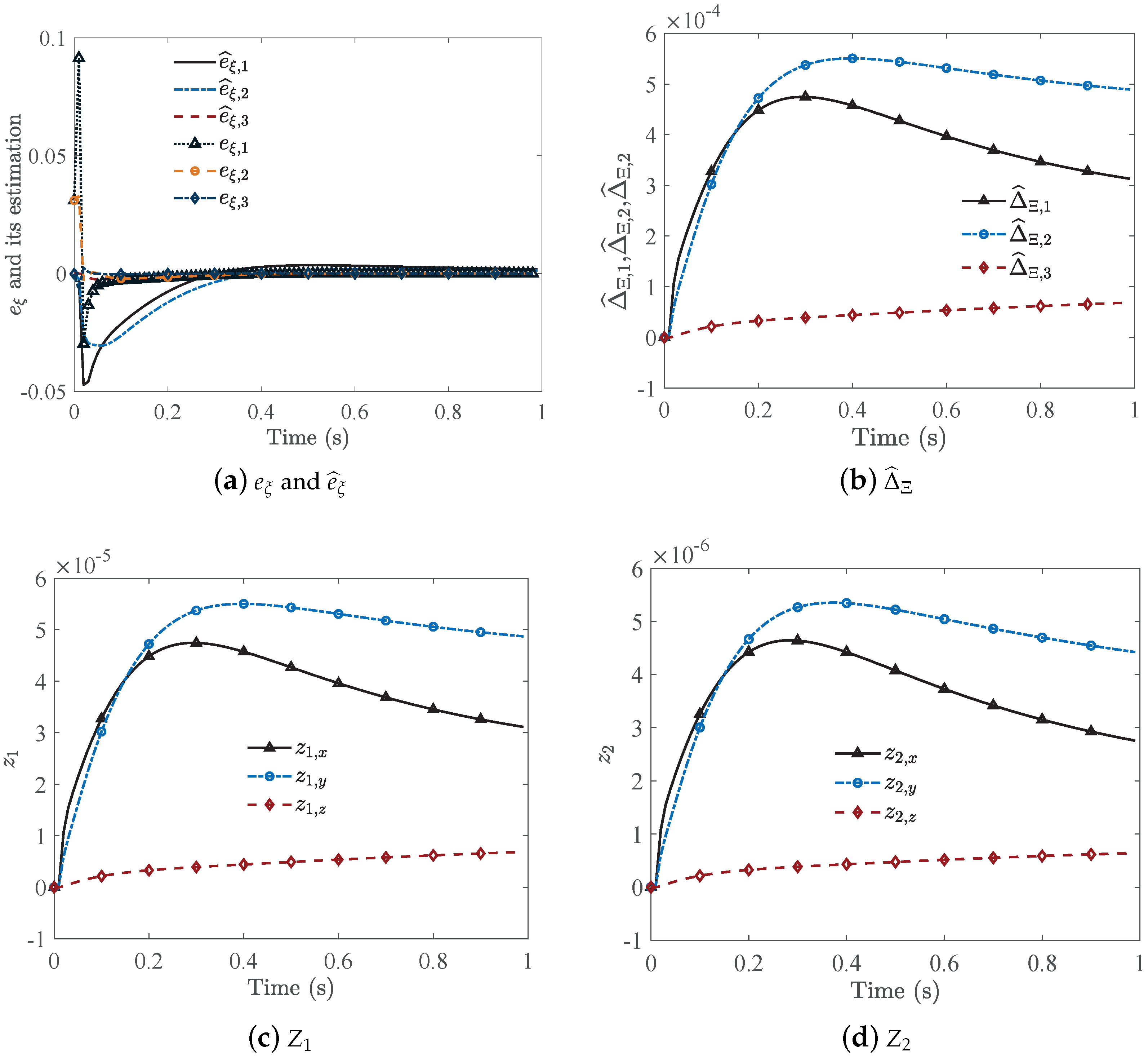
Figure 4.
Disturbance observer state variable of the hybrid aerial underwater quadrotor.
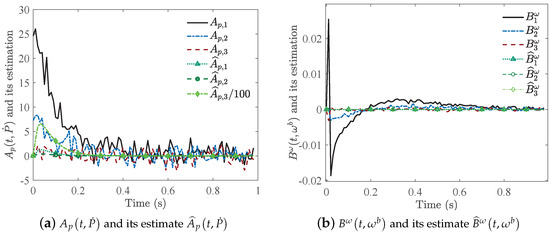
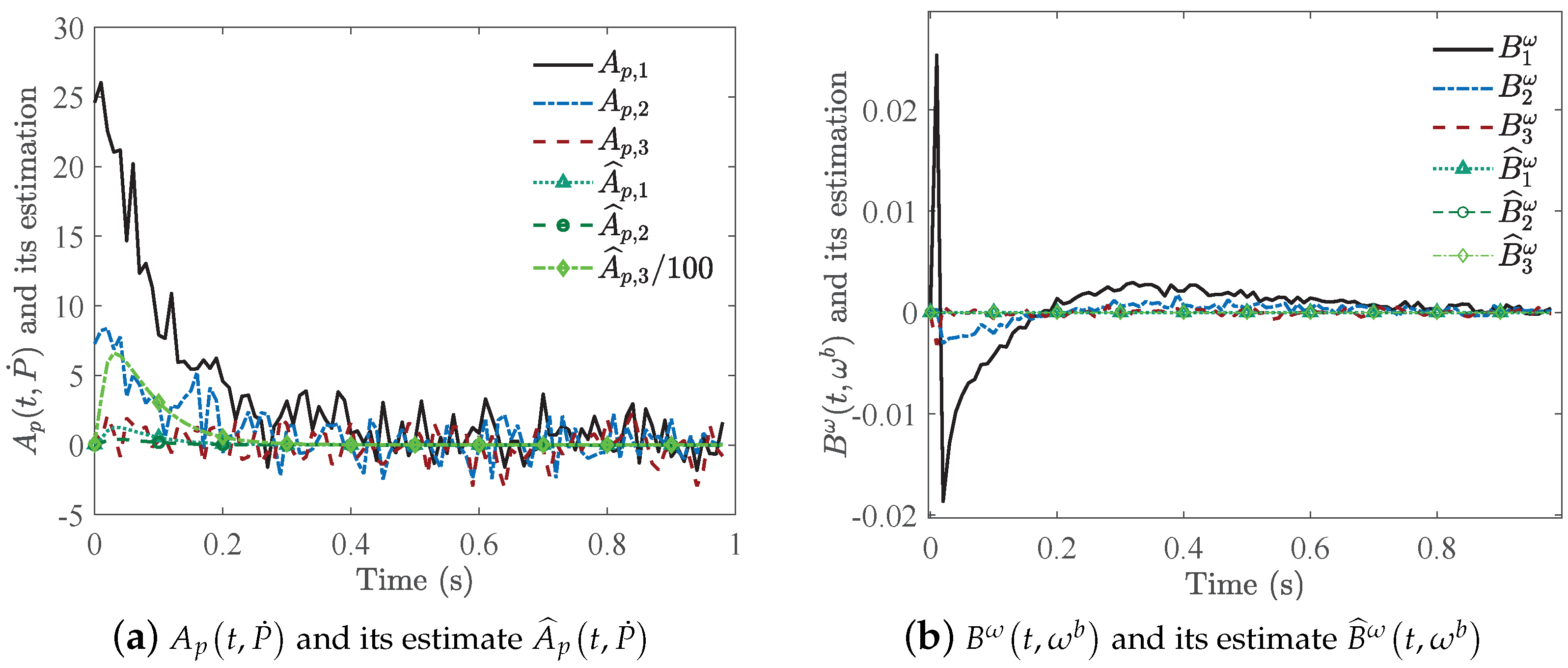
Figure 5.
The unknown uncertainty and its estimate of the hybrid aerial underwater quadrotor.
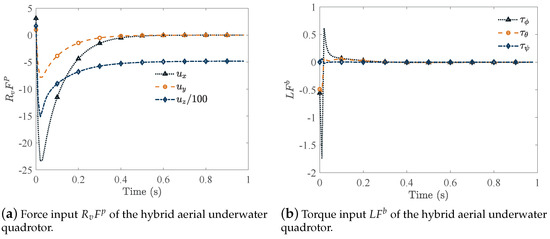
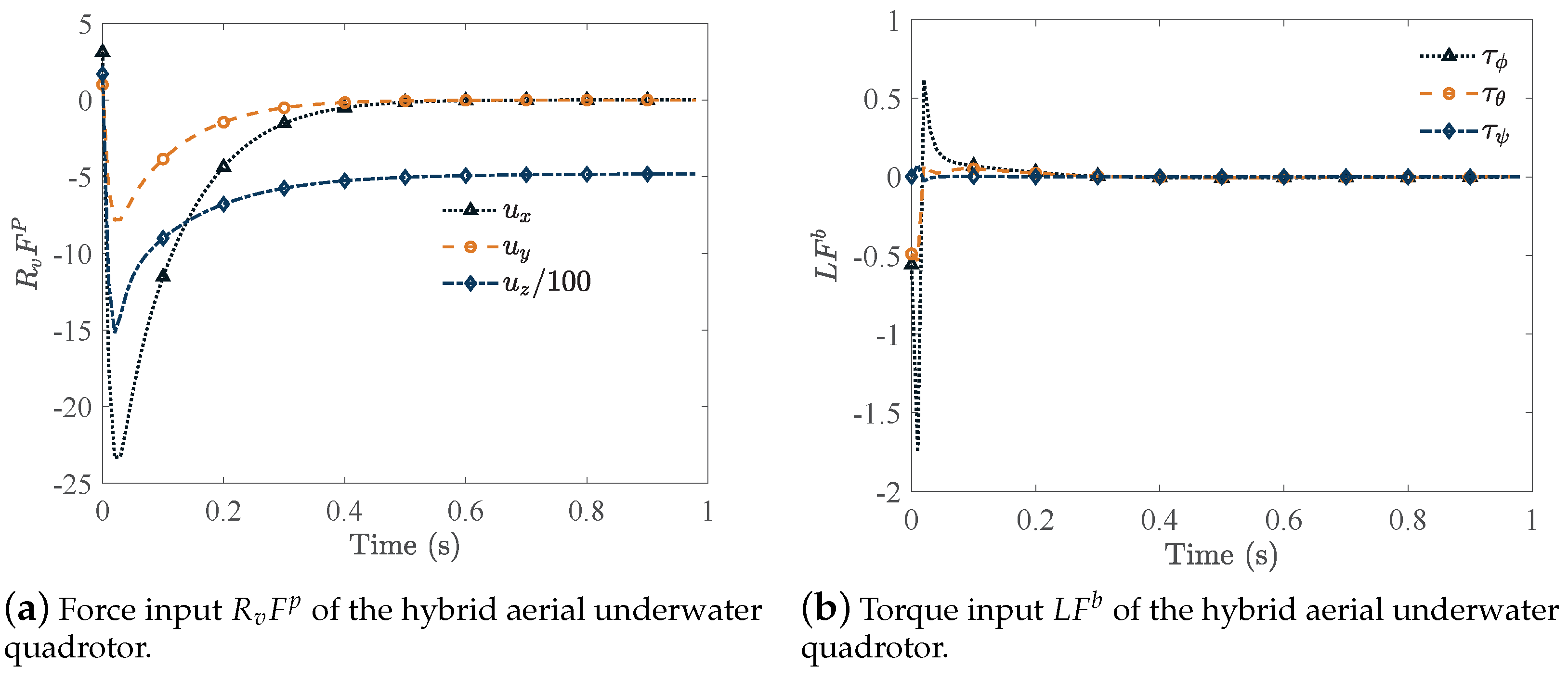
Figure 6.
Control input variable of the hybrid aerial underwater quadrotor.
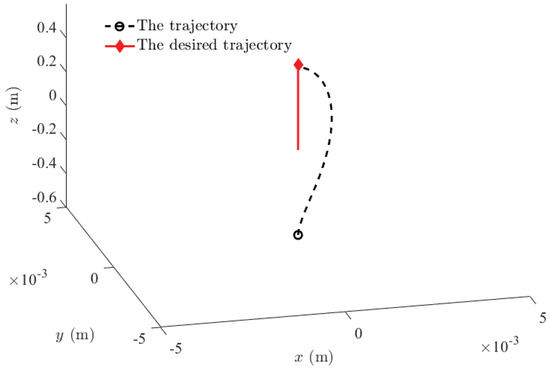
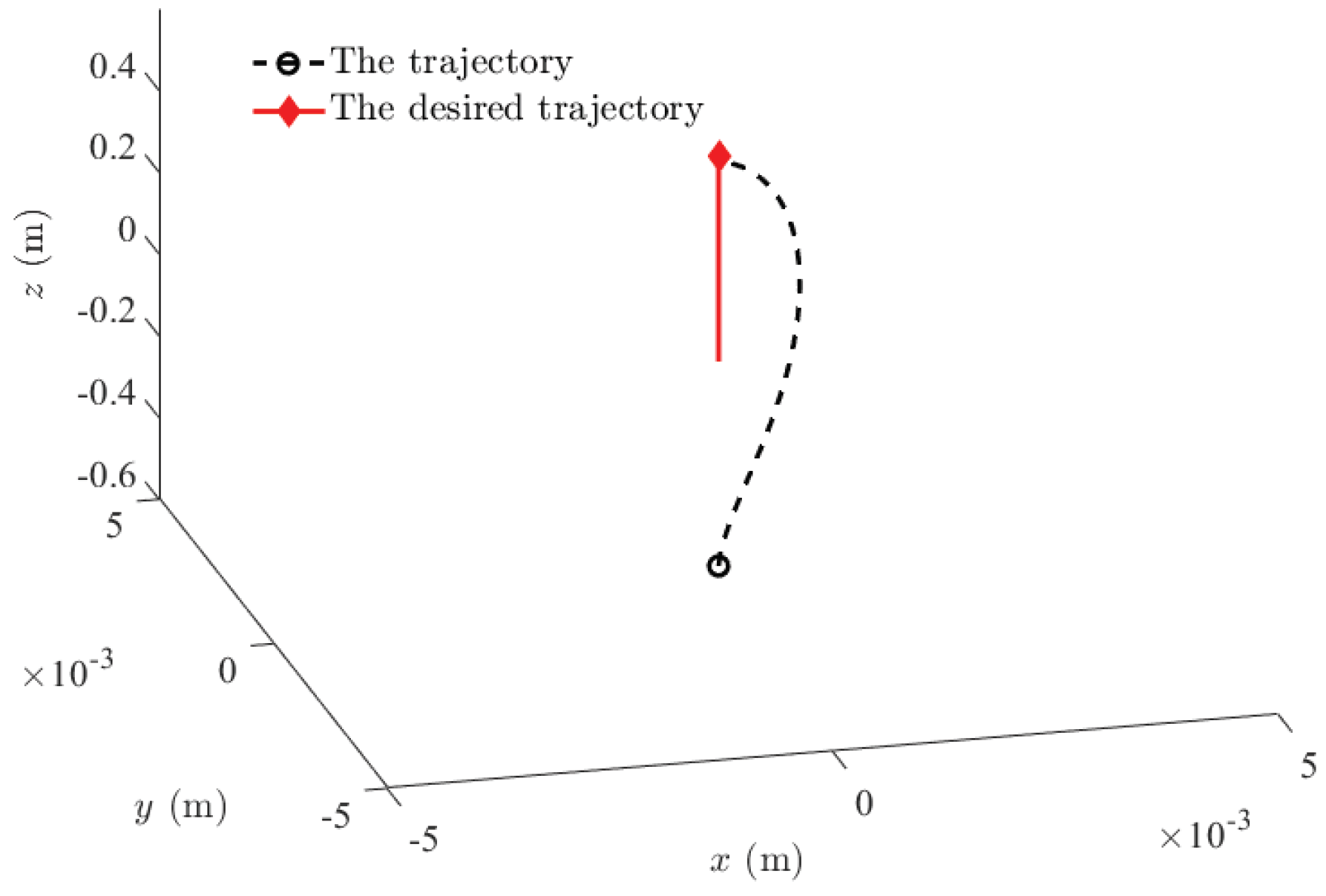
Figure 7.
Three-dimensional trajectory of water surface take–off.
Figure 2 shows the position and the velocity curves in the directions. Figure 2a,b illustrate that the position changes of the HAUQ in the two directions of the -axis and -axis are less than and , which shows that the HAUQ climbs. After seconds, Figure 2c illustrates that the HAUQ reaches the fixed−point hover drainage position. Figure 2d gives the velocity curves of . The velocity in the -axis and -axis is less than , and that in the -axis is less than . Figure 3a gives the change curves of the attitude angle and its desired angle command . Figure 3b gives the change curves of the attitude angular rate. The roll rate, the pitch rate, and the yaw rate are all less than . Figure 2 and Figure 3 actually show that the trajectory tracking errors and the angle tracking errors rapidly converge to a small neighborhood of zero. Figure 4 shows the curves of the disturbance observer states . Figure 4a shows that can realize the dynamic observation of . Figure 4b gives the estimate of . The state variables and are shown in Figure 4c,d. The approximation effect of the uncertainty term caused by complex kinematics is shown in Figure 5. Figure 5a illustrates that our proposed method combined with the adaptive approach and the polynomial method has good effect, and the initial value of the disturbance estimation in the z direction of reaches about 700 due to the position feedback in approximation. The disturbance term and its estimation are shown in Figure 5b. The control input curves of position and the attitude are given in Figure 6. Finally, the three-dimensional flight trajectory of the mass center of the HAUQ in the water surface take-off is shown in Figure 7 which means that the HAUQ can achieve climbing and hover drainage as the fixed point (0, 0, 0.5 m) with the proposed control algorithm, the uncertainty estimator, and the disturbance observer. However, the unmodeled items, the time—varying drainage mass , the time—varying disturbance moment of inertia matrix , the external disturbance, and the time-varying change matrix of the arm of the force , exist and are given by (69), (70), and (73), and the position and the attitude can achieve a successful nonlinear robust tracking of their desired values under the proposed algorithm with the robust adaptive law and and the disturbance observer (43) in this simulation scenario.
5. Conclusions
In order to solve the problem of climbing and draining water from a slender HAUQ, a robust position and attitude control law with the adaptive law of the unknown approximation weights and a four-order disturbance observer are proposed by using the robust control method, the uncertainty approximation approach, and the disturbance observer. The proposed control law can effectively compensate and suppress the model uncertainty and the additional disturbance caused by the drainage, the multi-media complex dynamics, the gust, and other factors. A numerical simulation shows its effectiveness.
Author Contributions
Conceptualization F.L.; methodology, F.L.; software, F.L.; validation, D.Y.; formal analysis, D.Y.; investigation, F.L.; resources, F.L.; data curation, F.L.; writing—original draft preparation, F.L.; writing—review and editing, F.L.; visualization, F.L.; supervision, D.Y.; project administration, F.L. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Feng Lei Youth Innovation Fund of CARDC, Grant/Award Numbers FL018070012 and ZZZH2000907098.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The author of this article is very grateful for the support of the Cross-Media Vehicle Research Center of China Aerodynamics Research and Development Center and Science.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shkurti, F.; Xu, A.; Meghjani, M.; Higuera, J.C.G.; Girdhar, Y.; Giguere, P.; Dudek, G. Multi-domain monitoring of marine environments using a heterogeneous robot team. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Algarve, Portugal, 7–12 October 2012; pp. 1747–1753. [Google Scholar]
- Murphy, R.R.; Steimle, E.; Griffin, C.; Cullins, C.; Hall, M.; Pratt, K. Cooperative use of unmanned sea surface and micro aerial vehicles at Hurricane Wilma. J. Field Robot. 2008, 25, 164–180. [Google Scholar] [CrossRef]
- Yuan, C.; Licht, S.; He, H. Formation learning control of multiple autonomous underwater vehicles with heterogeneous nonlinear uncertain dynamics. IEEE Trans. Cybern. 2017, 48, 2920–2934. [Google Scholar] [CrossRef] [PubMed]
- Izraelevitz, J.S.; Triantafyllou, M.S. A novel degree of freedom in flapping wings shows promise for a dual aerial/aquatic vehicle propulsor. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2015; pp. 5830–5837. [Google Scholar]
- Lu, D.; Xiong, C.; Lyu, B.; Zeng, Z.; Lian, L. Multi-mode hybrid aerial underwater vehicle with extended endurance. In Proceedings of the OCEANS-MTS/IEEE Kobe Techno-Oceans (OTO), Kobe, Japan, 28–31 May 2018; pp. 1–7. [Google Scholar]
- Yu, C.; Xiang, X.; Wilson, P.A.; Zhang, Q. Guidance-error-based robust fuzzy adaptive control for bottom following of a flight-style AUV with saturated actuator dynamics. IEEE Trans. Cybern. 2019, 50, 1887–1899. [Google Scholar] [CrossRef]
- Wu, Y.; Li, L.; Su, X.; Gao, B. Dynamics modeling and trajectory optimization for unmanned aerial-aquatic vehicle diving into the water. Aerosp. Sci. Technol. 2019, 89, 220–229. [Google Scholar] [CrossRef]
- Chen, Y.; Helbling, E.; Gravish, N.; Ma, K.; Wood, R.J. Hybrid aerial and aquatic locomotion in an at-scale robotic insect. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015; pp. 331–338. [Google Scholar]
- Lu, D.; Xiong, C.; Zeng, Z.; Lian, L. Adaptive dynamic surface control for a hybrid aerial underwater vehicle with parametric dynamics and uncertainties. IEEE J. Ocean. Eng. 2019, 45, 740–758. [Google Scholar] [CrossRef]
- Stewart, W.; Weisler, W.; Anderson, M.; Bryant, M.; Peters, K. Dynamic modeling of passively draining structures for aerial–aquatic unmanned vehicles. IEEE J. Ocean. Eng. 2020, 45, 840–850. [Google Scholar] [CrossRef]
- Gao, J.; Proctor, A.; Shi, Y.; Bradley, C. Hierarchical model predictive image-based visual servoing of underwater vehicles with adaptive neural network dynamic control. IEEE Trans. Cybern. 2015, 46, 2323–2334. [Google Scholar] [CrossRef]
- Wei, T.; Lu, D.; Zeng, Z.; Lian, L. Trans-media kinematic stability analysis for hybrid unmanned aerial underwater vehicle. J. Mar. Sci. Eng. 2022, 10, 275. [Google Scholar] [CrossRef]
- Drews, P.; Neto, A.; Campos, M. Hybrid unmanned aerial underwater vehicle: Modeling and simulation. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 4637–4642. [Google Scholar]
- Du, X.X.; Song, B.W.; Pan, G. Effect of wave and ocean current to motion of low-velocity UUV. Key Eng. Mater. 2011, 467, 75–79. [Google Scholar] [CrossRef]
- Teo, H.; Eng, H. A Robust AUV Docking Guidance and Navigation Approach to Handling Unknown Current Disturbances; M. S. Florida Atlantic University: Boca Raton, FL, USA, 2010. [Google Scholar]
- Hegrenes, O.; Hallingstad, O.; Jalving, B. A framework for obtaining steady-state maneuvering characteristics of underwater vehicles using sea-trial data. In Proceedings of the Mediterranean Conference on Control and Automation, Athens, Greece, 27–29 July 2007. [Google Scholar]
- Chen, W.U.; Jianbo, S.U. Trajectory tracking of quadrotor based on disturbance rejection control. Control. Theorey Appl. 2016, 33, 1422–1430. [Google Scholar]
- Carrillo, L.; Flores, G.; Sanahuja, G.; Lozano, R. Quad rotorcraft swithcing control: An application for the task of path following. IEEE Trans. Control. Syst. Technol. 2013, 22, 99. [Google Scholar]
- Sira-Ramrez, H.; Cortes-Romero, J.; Luviano-Juzrez, A. Robust linear control of nonlinear flat systems. Robust Control. Theory Appl. 2010, 20, 455–477. [Google Scholar]
- Yang, H.; Cheng, L.; Xia, Y.; Yuan, Y. Active disturbance rejection attitude control for a dual closed-loop quadrotor under gust wind. IEEE Trans. Control. Syst. Technol. 2018, 26, 1400–1405. [Google Scholar] [CrossRef]
- Chang, K.; Ma, D.; Li, T.; Xia, Y. Active disturbance rejection and predictive control strategy for a quadrotor helicopter. IET Control. Theory Appl. 2016, 10, 2213–2222. [Google Scholar]
- Lee, S.J.; Kim, S.; Johansson, K.H.; Kim, H.J. Robust acceleration control of a hexarotor UAV with a disturbance observer. In Proceedings of the IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 4166–4171. [Google Scholar]
- Chen, M.; Xiong, S.; Wu, Q. Tracking flight control of quadrotor based on disturbance observer. IEEE Trans. Syst. Man, Cybern. Syst. 2019, 1–10. [Google Scholar] [CrossRef]
- Xiao, B.; Yin, S. A new disturbance attenuation control scheme for quadrotor unmanned aerial vehicles. IEEE Trans. Ind. Inform. 2017, 13, 2922–2932. [Google Scholar] [CrossRef]
- Castillo, A.; Sanz, R.; Garcia, P.; Qiu, W.; Wang, H.; Xu, C. Disturbance observer-based quadrotor attitude tracking control for aggressive maneuvers. Control. Eng. Pract. 2019, 82, 14–23. [Google Scholar] [CrossRef]
- Wang, L.; Su, J. Robust disturbance rejection control for attitude tracking of an aircraft. IEEE Trans. Control. Syst. Technol. 2015, 23, 2361–2368. [Google Scholar] [CrossRef]
- Yang, J.Q.; Zhu, F.L. Linear-matrix-inequality observer design of nonlinear systems with unknown input and measurement noise reconstruction. Control. Theory Appl. 2014, 31, 538–544. [Google Scholar]
- Yang, J.; Li, S.; Sun, C.; Guo, L. Nonlinear-disturbance-observerbased robust flight control for airbreathing hypersonic vehicles. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1263–1275. [Google Scholar] [CrossRef]
- Bu, X.; Wu, X.; Chen, Y.; Chen, Y.; Bai, R. Nonlinear disturbance-observer-based sliding mode backstepping control of hypersonic vehicle. Control. Theory Appl. 2014, 31, 1473–1479. [Google Scholar]
- Sontag, E. Input to state stability: Basic concepts and results. In Proceedings of the Lecture Notes in Mathematics, CIME Course, Cetraro, Italy, 19–29 June 2004. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).