
Multi-Objective Parameter Optimization of Submersible Well Pumps Based on RBF Neural Network and Particle Swarm Optimization


Abstract
:1. Introduction
2. Numerical Simulation
2.1. Governing Equation
- (1)
- The continuity equation
- (2)
- Momentum equation
- (3)
- Energy conservation equation
2.2. The Selection of the Realizable k-ε
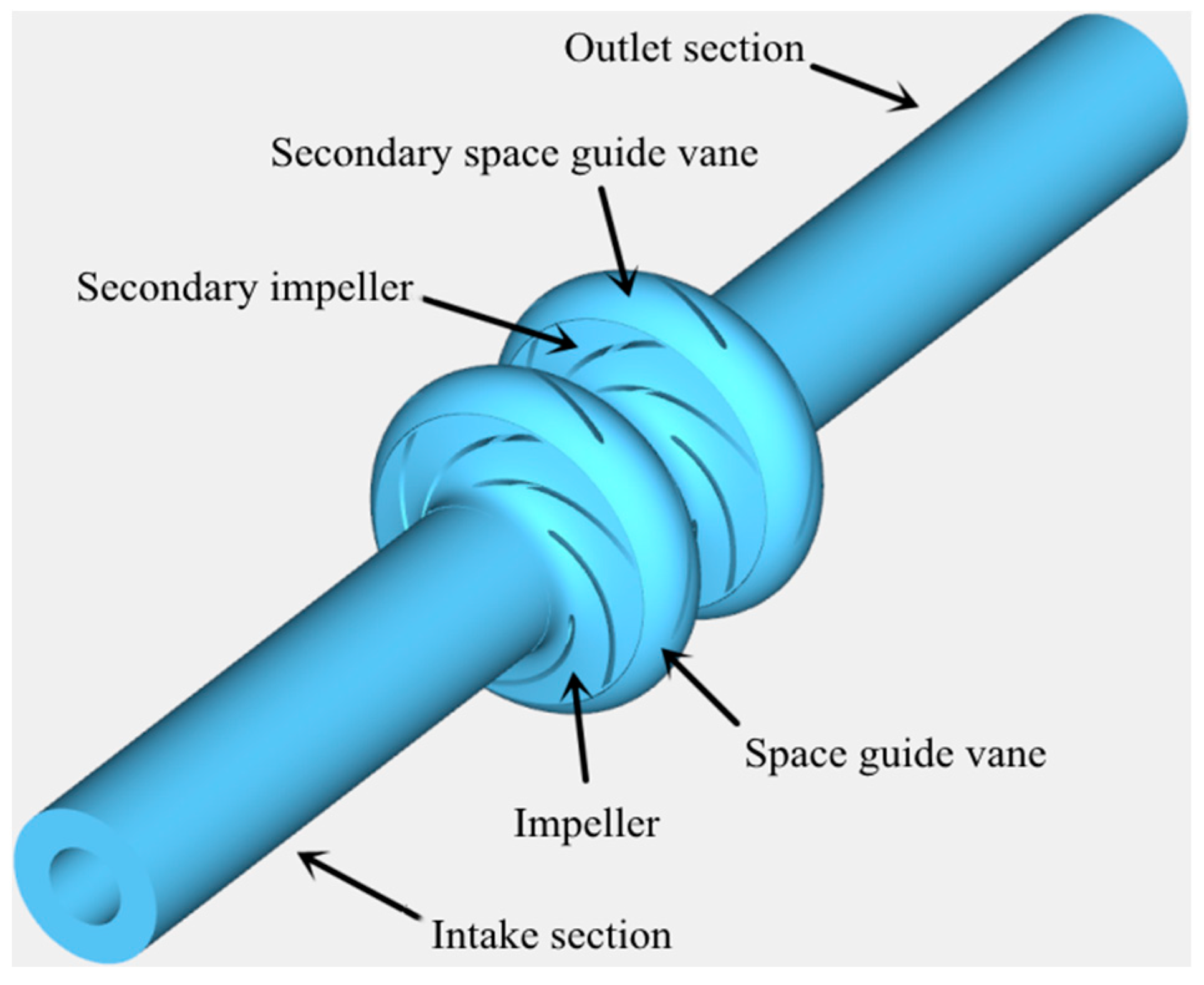
2.3. Geometric Model
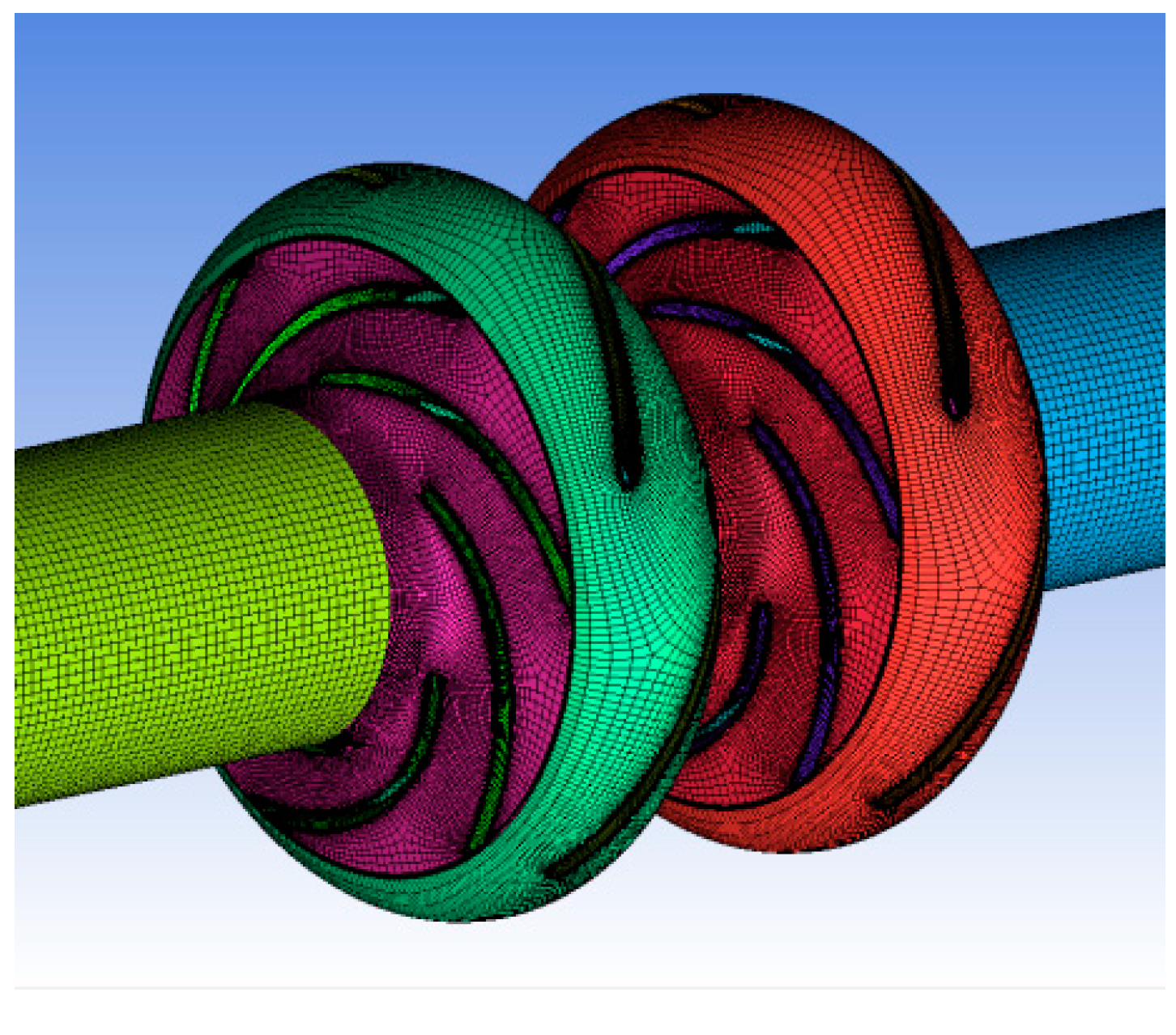
2.4. Meshing and Irrelevance Analysis
2.5. Resolving Schemes
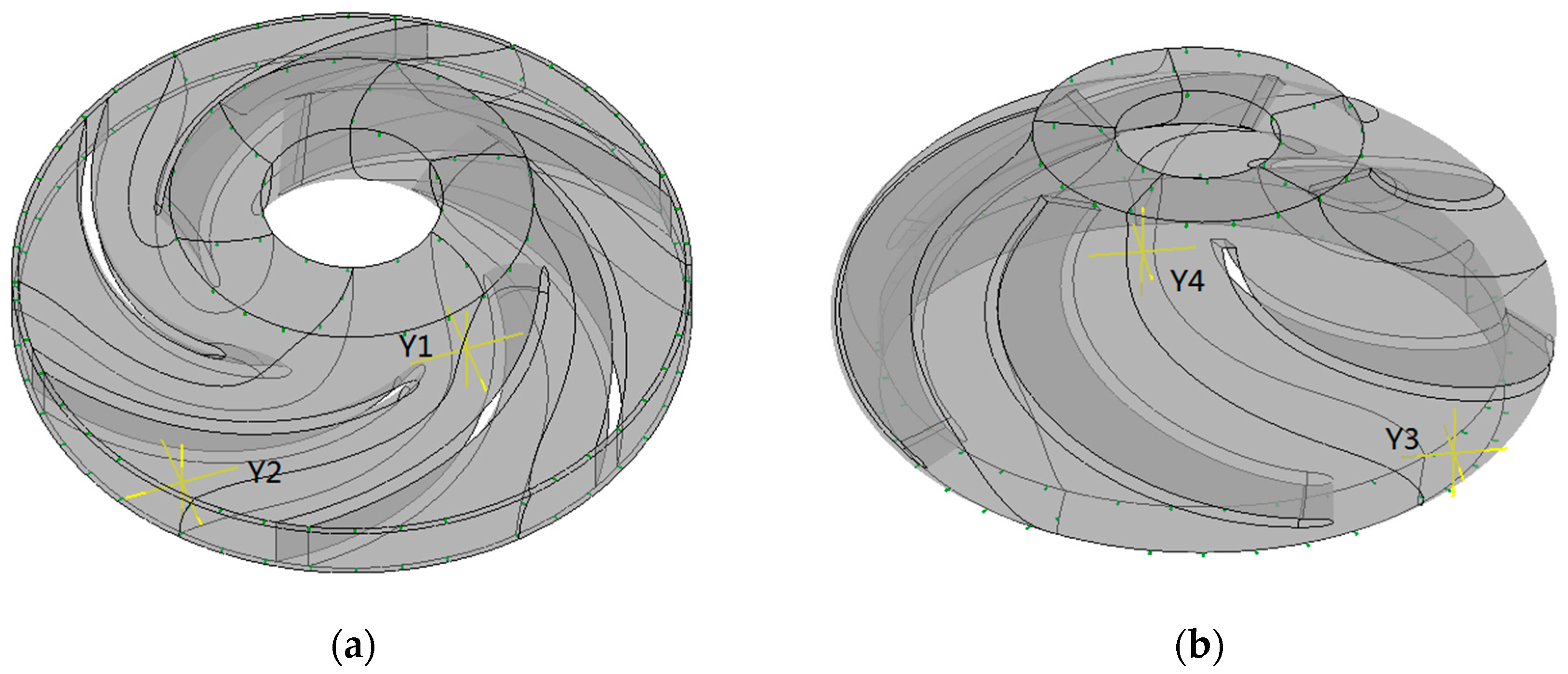
2.6. Monitoring Point Setup
3. Comparison of Theoretical Simulation and Performance Tests
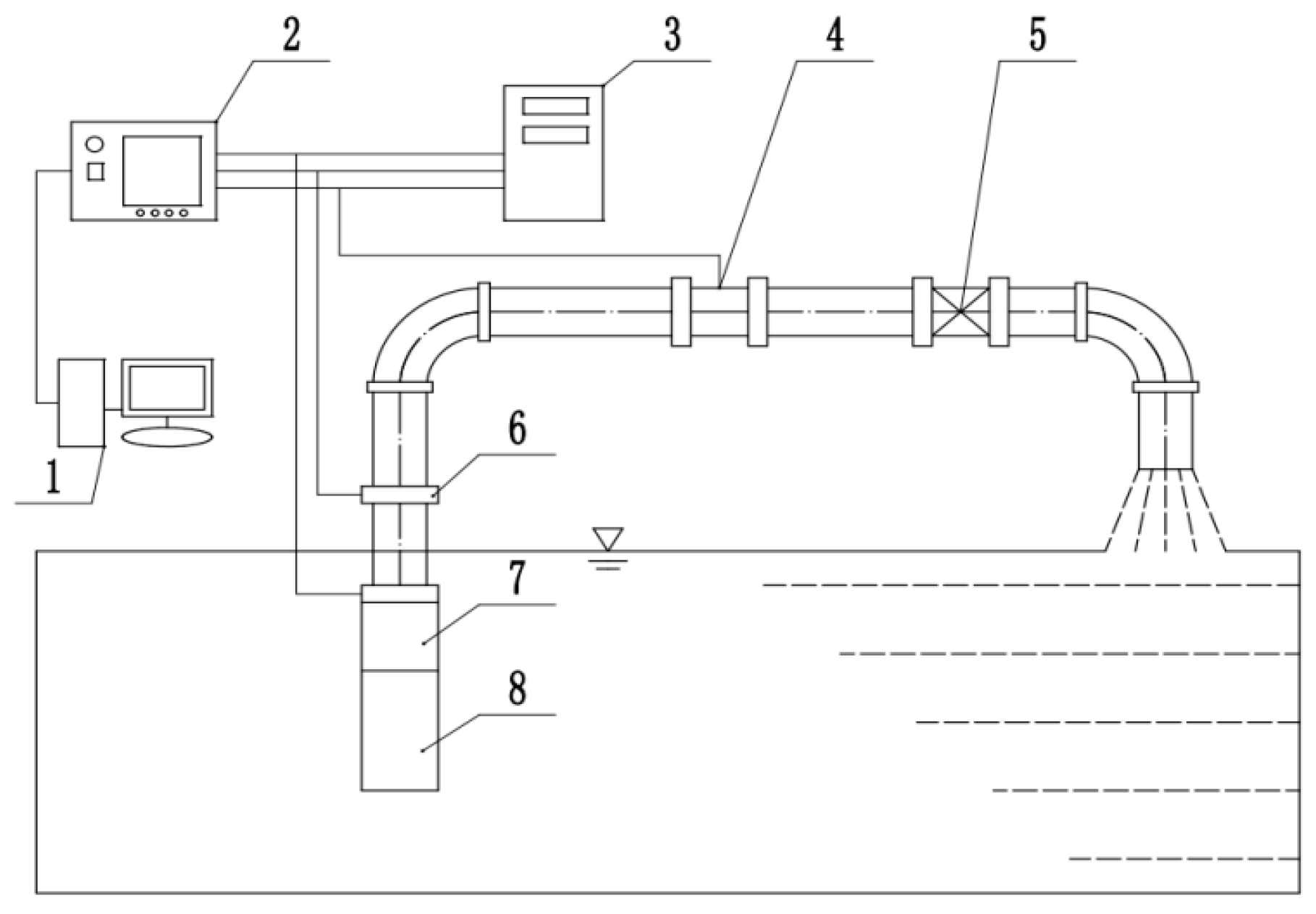
3.1. Test Platform Construction
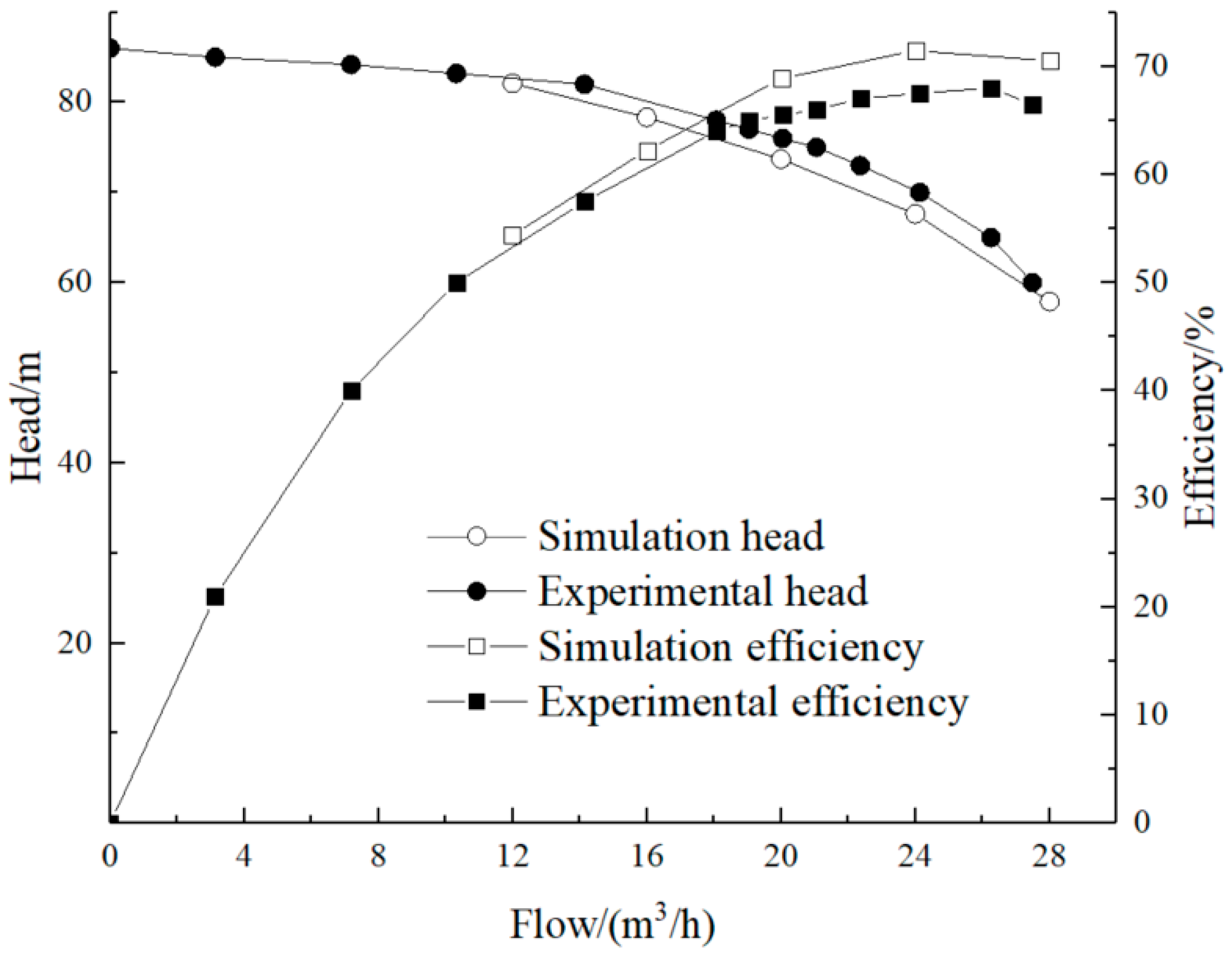
3.2. Comparative Analysis of Theoretical Simulations and Performance Experiments
4. Multi-Objective Optimization
4.1. Significance Analysis of Influencing Factors
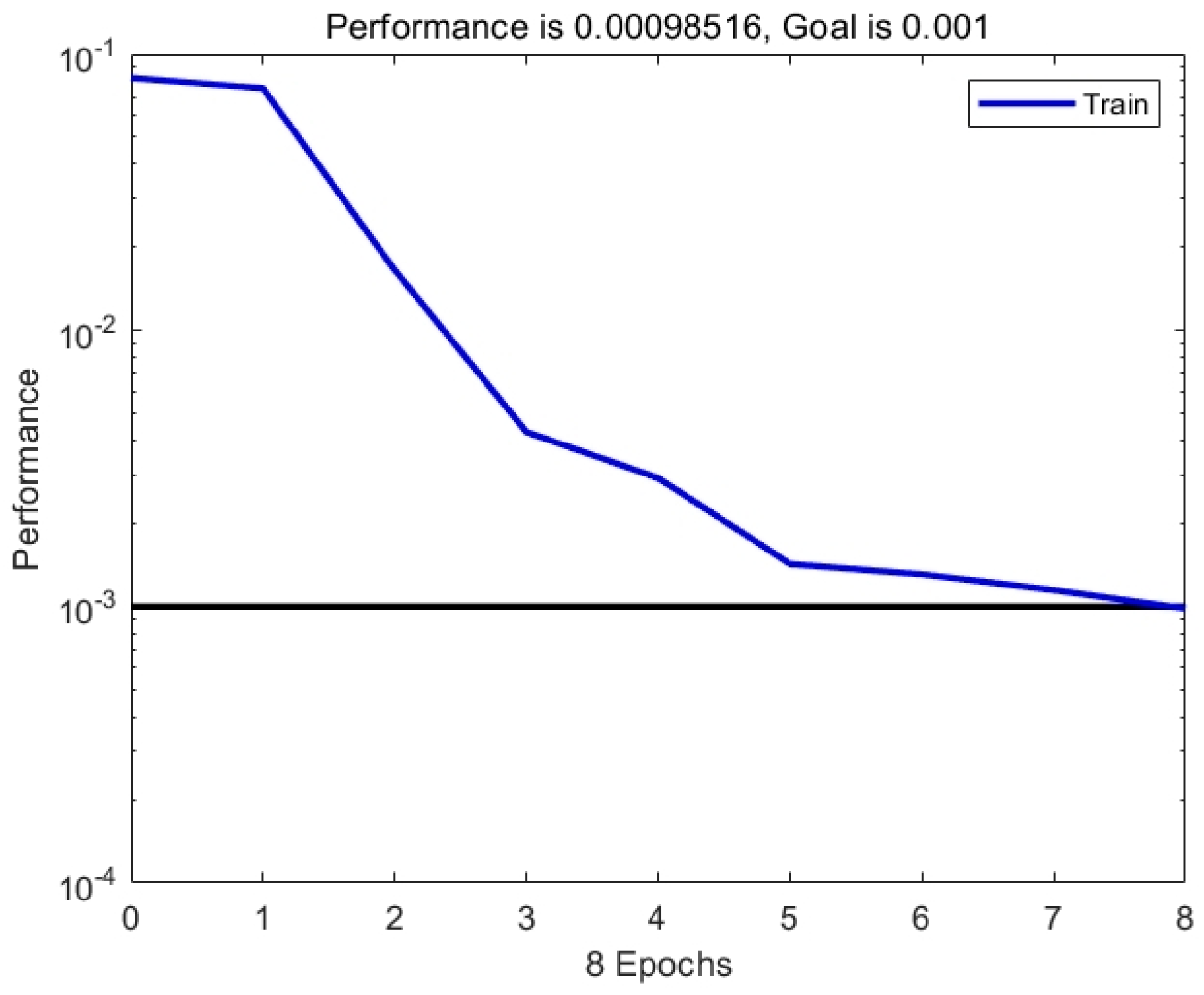
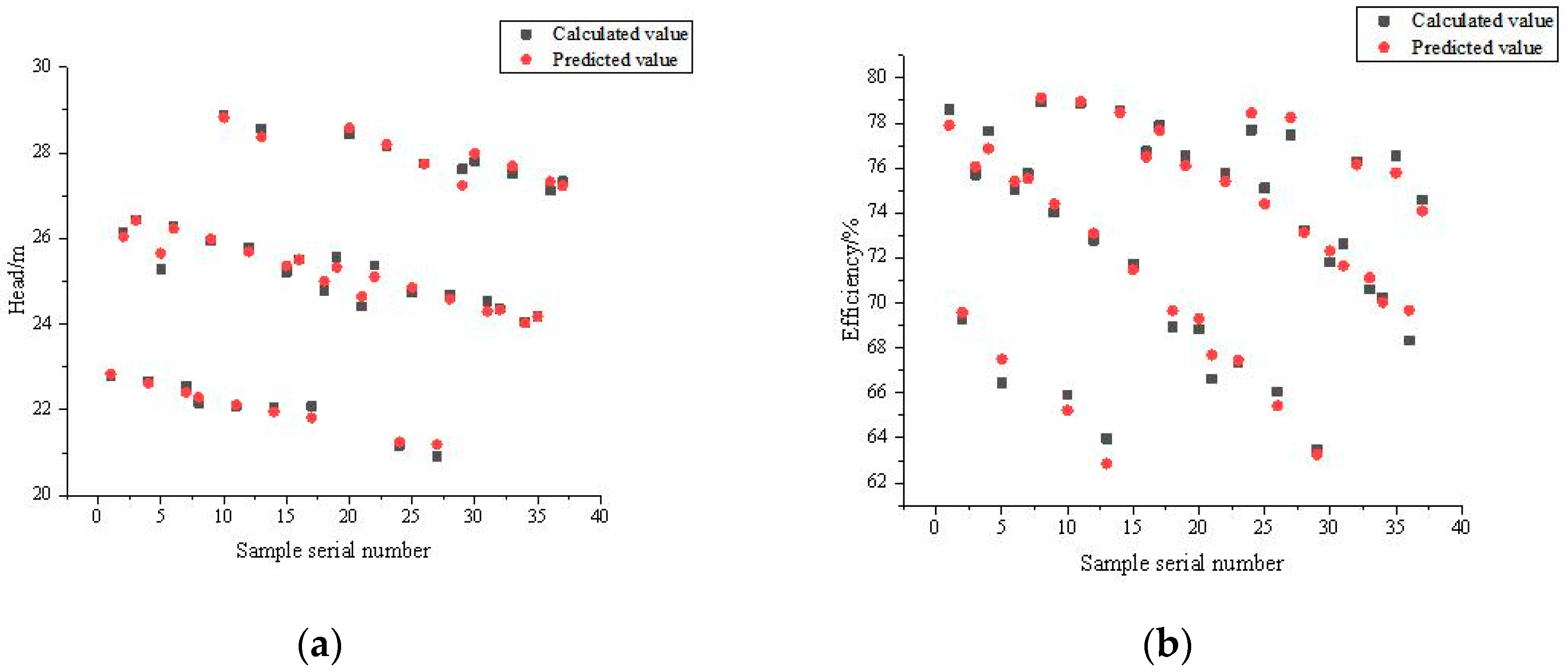
4.2. Hydraulic Performance Prediction Model
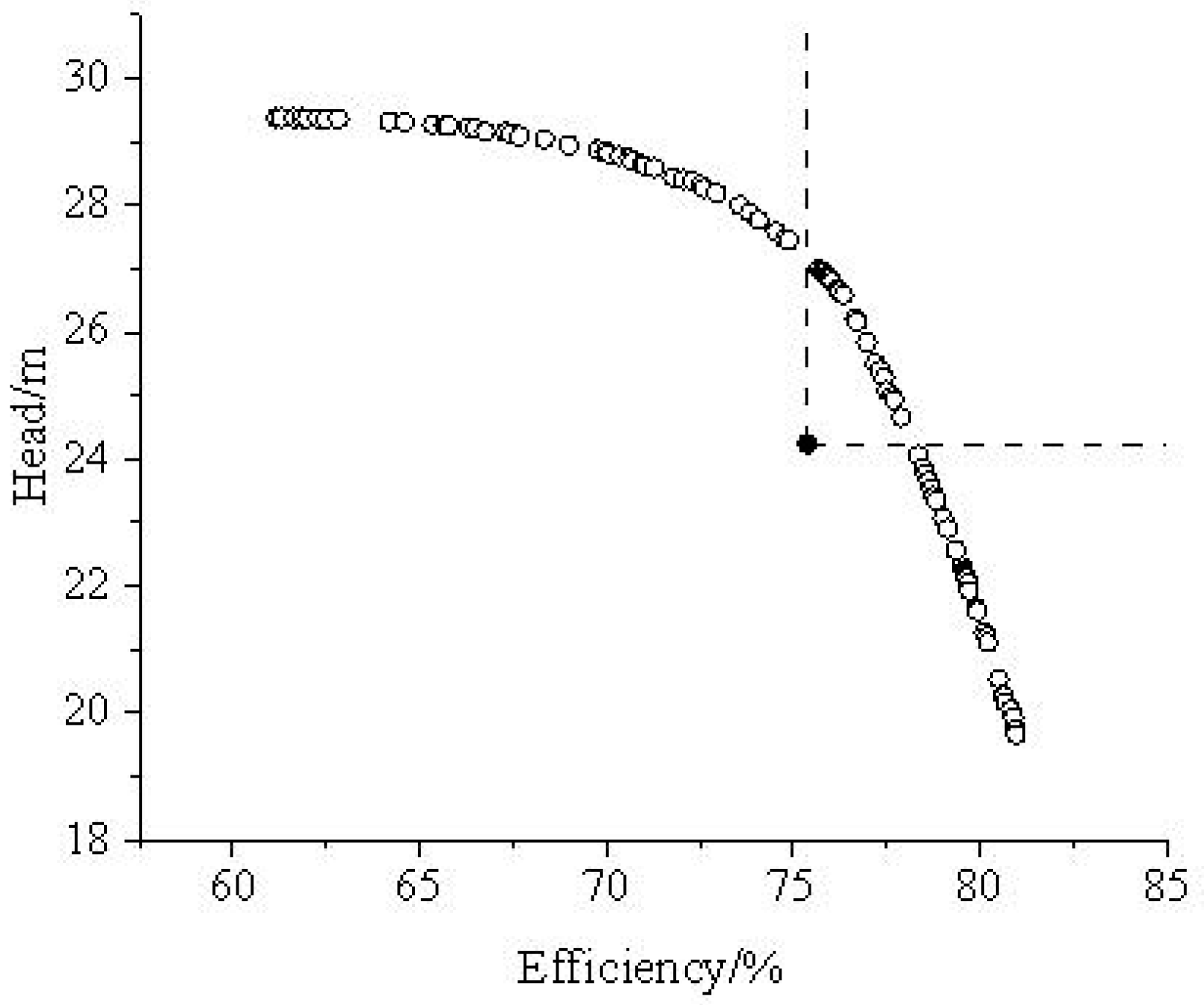
4.3. Multi-Objective Particle Swarm Optimization Algorithm Optimization
5. Analysis of Results
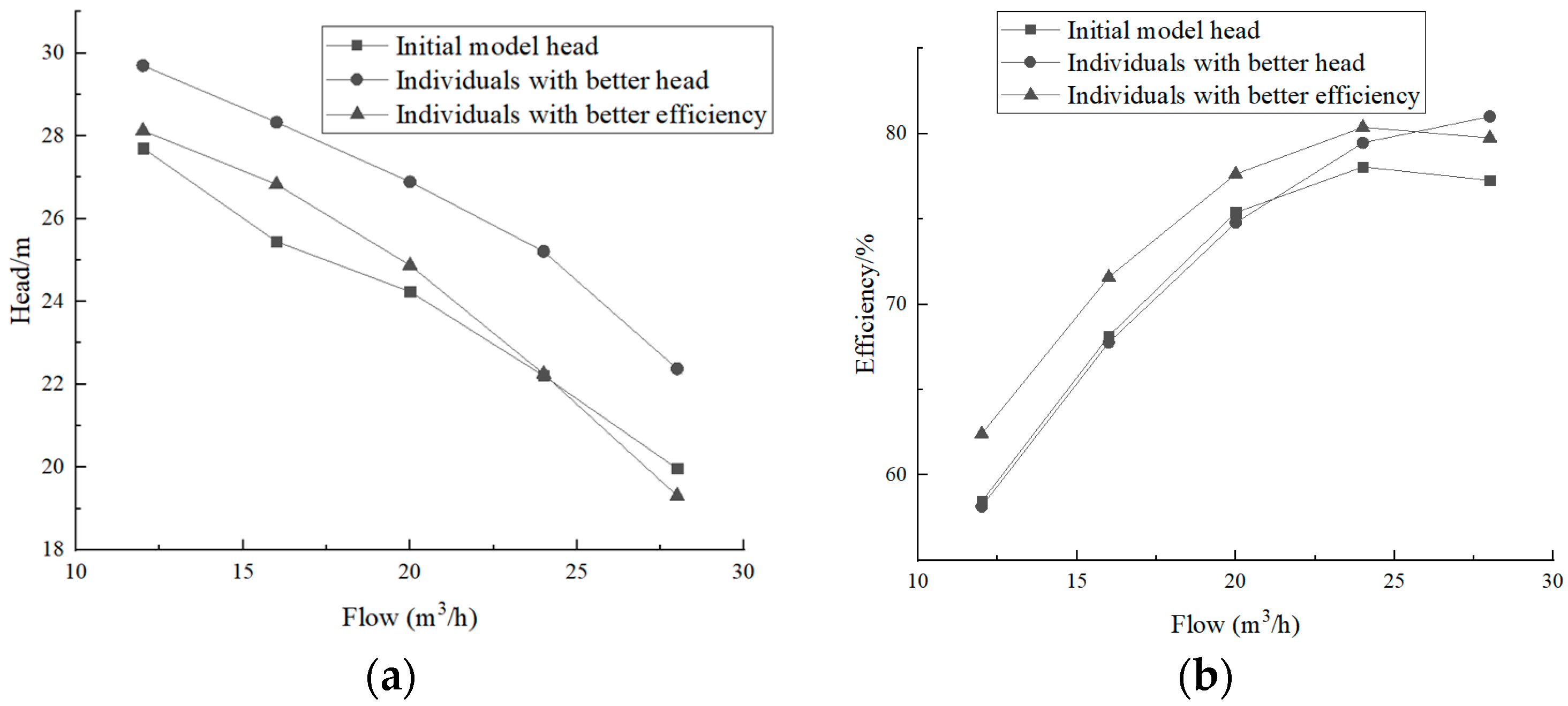
5.1. External Characterization
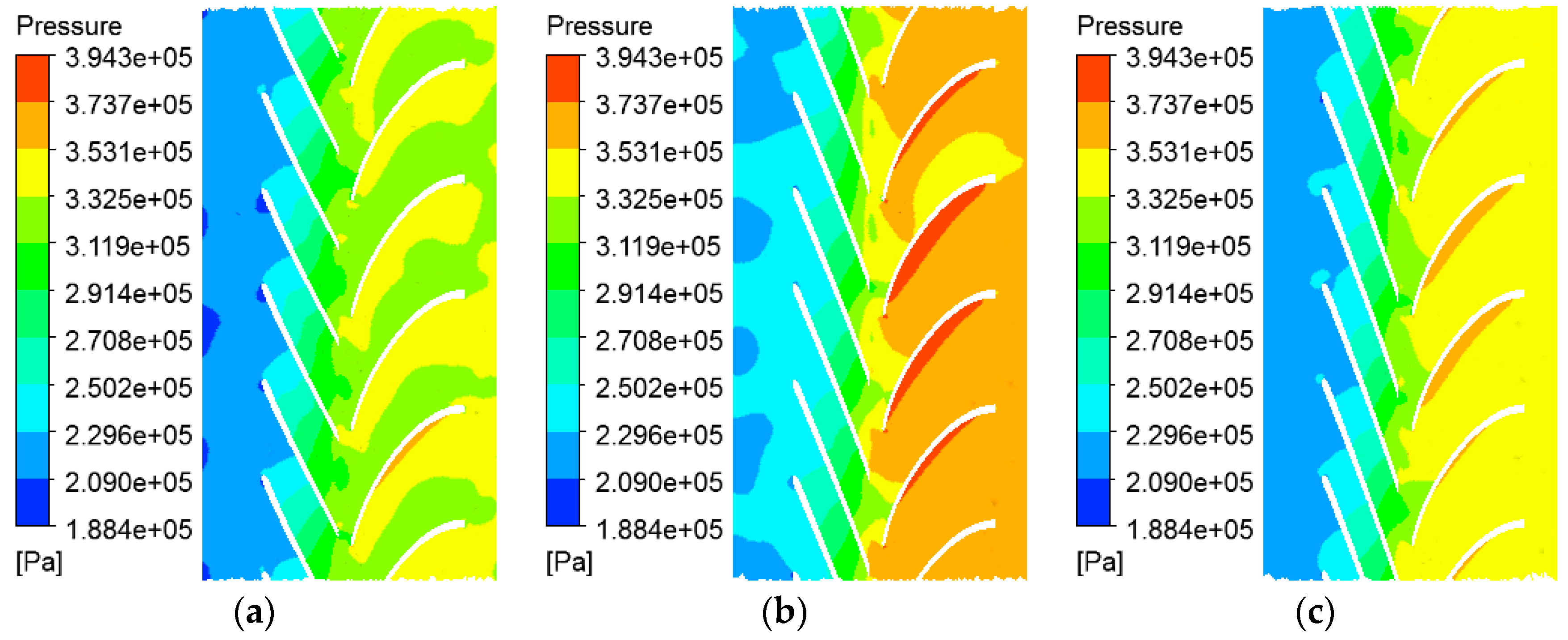
5.2. Pressure Distribution Analysis
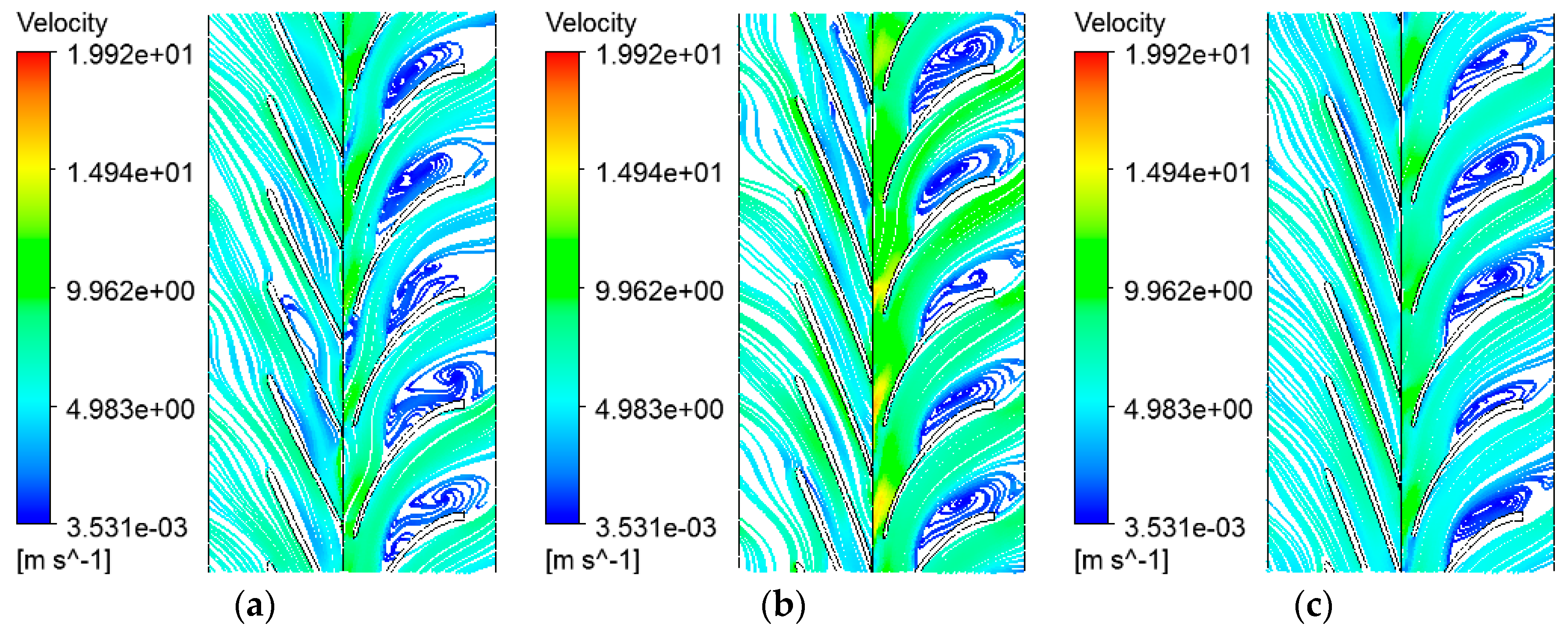
5.3. Velocity Flow Line Analysis
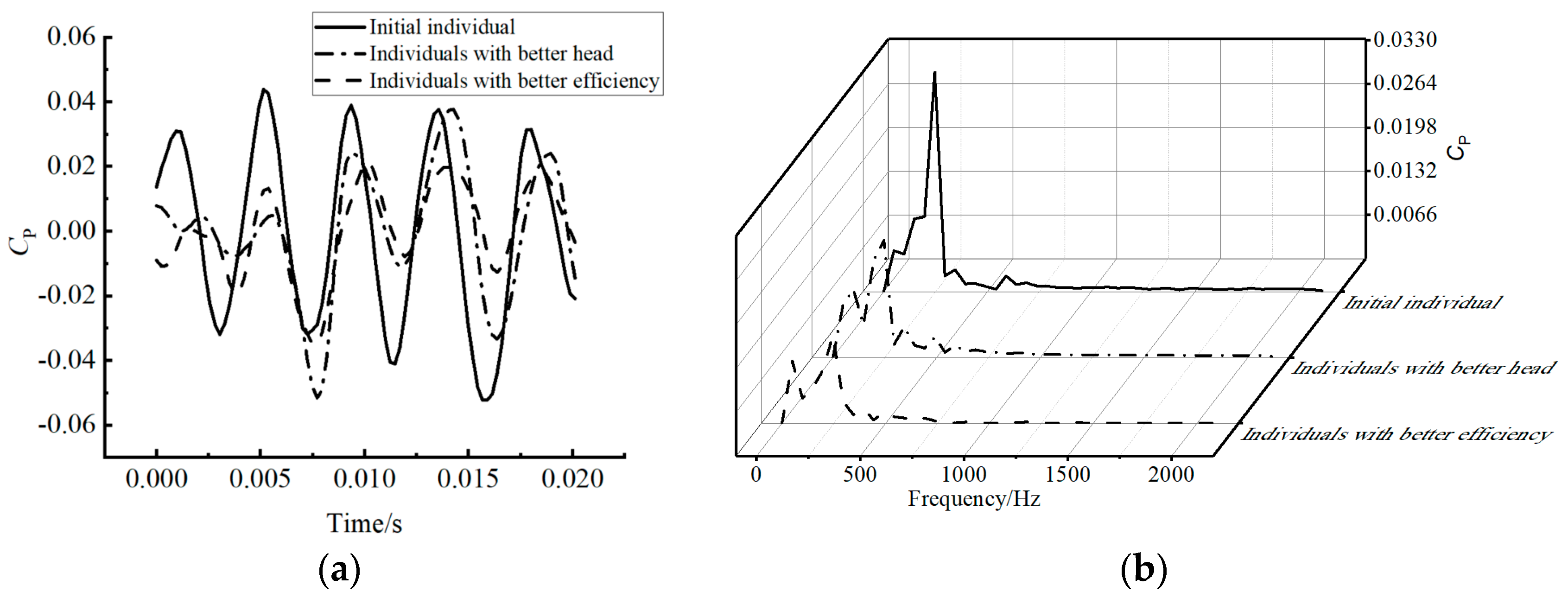
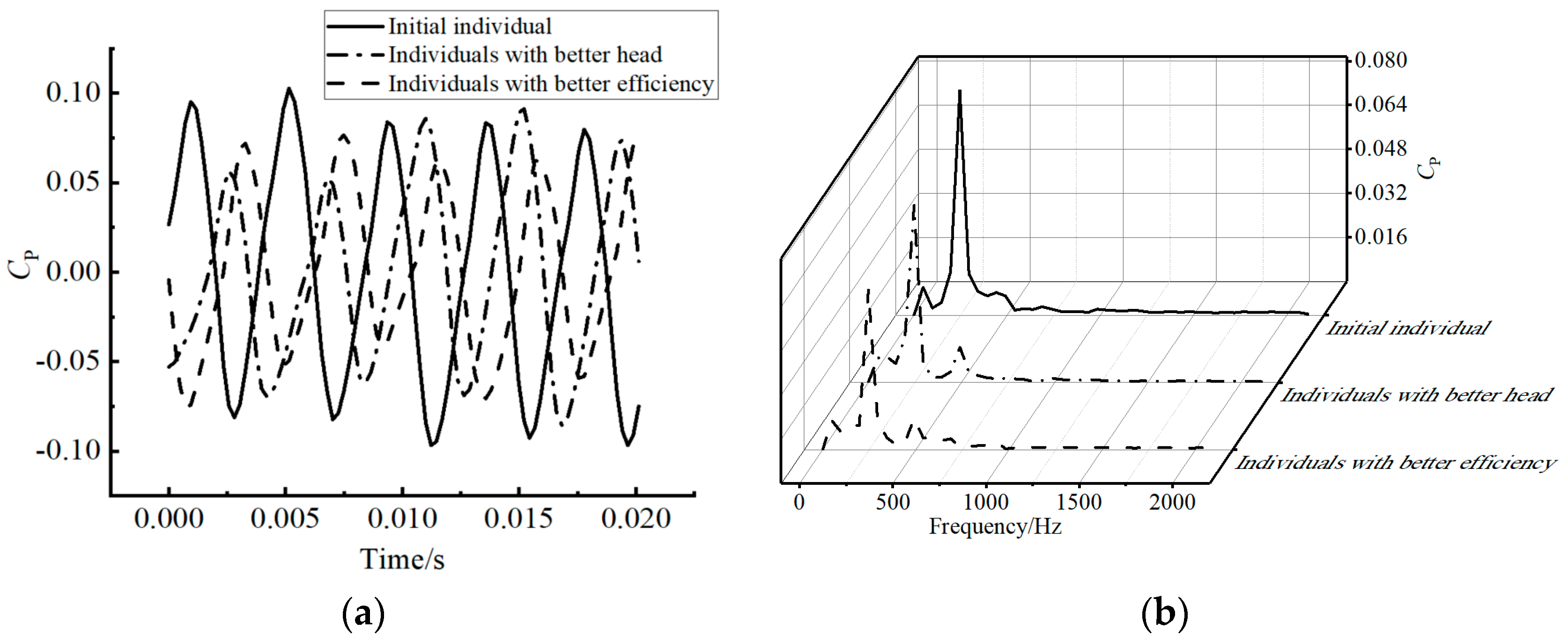
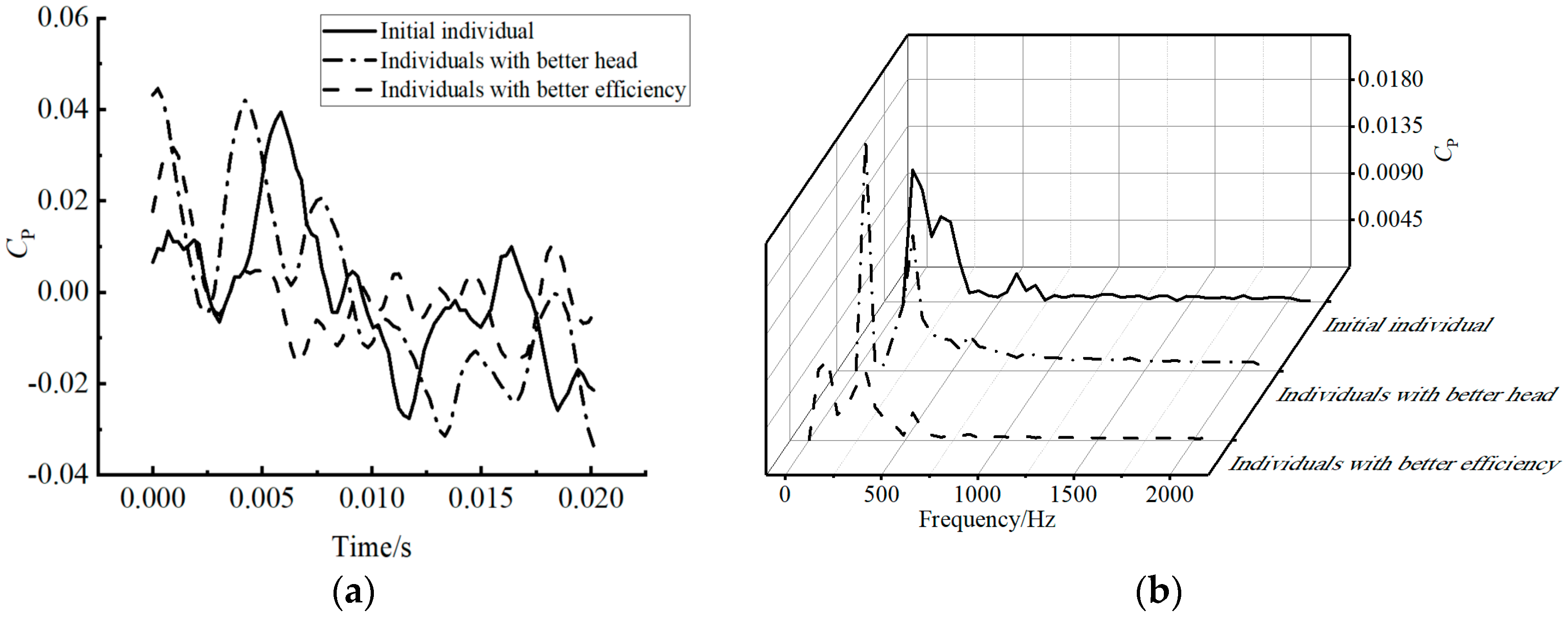
5.4. Pressure Pulsation Analysis
6. Conclusions
- (1)
- Based on the Plackett-Burman experimental design in the professional experimental design software Design Expert 12.0, it was determined that the impeller outlet settling angle, outlet width, and blade wrap angle were significant influencing factors. The difference between the predicted value of the RBF neural network and the calculated value of the CFX was small, and the maximum error of its head was 1.5% and the maximum error of its efficiency was 1.9%, i.e., the RBF neural network prediction model is accurate and reliable.
- (2)
- In this study, the pump performance prediction model of the RBF neural network and the optimization design method of the multi-objective particle swarm optimization algorithm are adopted. These improvements enable the research to better fit complex pump performance models and perform design optimizations considering multiple optimization objectives. In the optimization process, the search strategy is adjusted in time to avoid being affected by the local optimal solution. The algorithm can better explore the design space and find the global optimal solution, thereby improving the stability and accuracy of the optimization results. Finally, the optimal outlet angle, outlet width, and blade wrap angle of the individuals with better head and efficiency were determined to be 17°, 15 mm, 122°, and 17°, 13 mm, 130°, respectively.
- (3)
- The optimized head has increased by approximately 2.65 meters compared to the head of the superior individual, and the efficiency has increased by approximately 2.3 percentage points compared to the efficiency of the superior individual. The pressure gradient in the impeller flow path is more pronounced after optimization, the work capacity is significantly improved, the spatial guide vortex area is smaller, and the flow line is more regular. Compared to the initial individual model, the pressure pulsation in the impeller inlet and outlet and the spatial guide vane inlet of the higher-head individual is reduced by 46.7%, 21.3%, and 20.2%, respectively, while the pressure pulsation in the spatial guide vane outlet increases by 75.9%, but the pressure pulsation coefficient after the increase is still small and within the acceptable range. The higher-efficiency individual had a 59.9%, 29%, 30.2%, and 46.5% reduction in pressure pulsation amplitude at the impeller inlet and outlet as well as at the space guide vane inlet and outlet, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.Y.; Jiang, C.X.; Lv, S.; Wang, X.; Li, W.-Y. Clocking effect of outlet RGVs on hydrodynamic characteristics in a centrifugal pump with an inlet inducer by CFD method. Eng. Appl. Comput. Fluid Mech. 2021, 15, 222–235. [Google Scholar] [CrossRef]
- Lai, F.; Zhu, X.; Duan, Y.; Li, G. Clocking effect in a centrifugal pump with a vaned diffuser. Mod. Phys. Lett. B 2020, 34, 205–286. [Google Scholar] [CrossRef]
- Tan, M.; Lian, Y.; Wu, X.; Liu, H. Numerical investigation of clocking effect of impellerson a multistage pump. Eng. Comput. 2019, 10, 150–158. [Google Scholar]
- Gu, Y.; Pei, J.; Yuan, S.; Wang, W.; Zhang, F.; Wang, P.; Appiah, D.; Liu, Y. Clocking effect of vaned diffuser on hydraulic performance of high-power pump by using the numerical flow loss visualization method. Energy 2019, 170, 986–997. [Google Scholar] [CrossRef]
- Yuan, S.Q.; Wang, W.J.; Pei, J.; Zhang, J.F.; Mao, J.Y. Multi-objective optimization of low-specific-speed centrifugal pump. J. Agric. Eng. 2015, 31, 46–52. [Google Scholar]
- Li, M.C. Research on Automatic Optimization Design of Mixed-Flow Pump Impeller Based on Multi-Objective; Xihua University: Chengdu, China, 2015. [Google Scholar]
- Wang, C.L.; Ye, J.; Zeng, C.; Xia, Y.; Luo, B. Multi-objective optimum design of high specific speed mixed-flow pump based on NSGA-IIgenetic algorithm. J. Agric. Eng. 2015, 31, 100–106. [Google Scholar]
- Zhao, W.G.; Sheng, J.P.; Yang, J.H.; Song, Q.C. Optimization design and experiment of centrifugal pump based on CFD. J. Agric. Eng. 2015, 31, 125–131. [Google Scholar]
- Liao, F.; Zhang, H. Optimization design of lower speed pump based on genetic algorithm. China Agric. Chem. News 2016, 37, 233–236. [Google Scholar]
- Jiang, W.Z.; Duan, S.Q.; Yang, C.M.; Wang, G.C. Optimal design of centrifugal pump impeller based on CFD simulations and BP neural network. Mach. Tool Hydraul. 2016, 44, 67–70. [Google Scholar]
- Wang, C.L.; Feng, Y.M.; Ye, J.; Luo, B.; Liu, K.K. Multi-objective parameters optimization of centrifugal slurry pump based on RBF neural network and NSGA-IIgenetic algorithm. J. Agric. Eng. 2017, 33, 109–115. [Google Scholar]
- Tao, R.; Xiao, R.F.; Yang, W. Optimization design for axial fiow pump based on genetic algorithm. J. Irrig. Drain. Mach. Eng. 2018, 36, 573–579. [Google Scholar]
- Li, Q.M.; Jiang, J.X.; Li, Y. Fuel pump impeller optimization design based on multi-object genetic algorithm. Mod. Manuf. Eng. 2018, 7, 121–126. [Google Scholar]
- Wang, C.L.; Hu, B.B.; Feng, Y.M.; Li, K.K. Multi-objective optimization of double vane pum-p based on radial basis neural network and particle swarm. J. Agric. Eng. 2019, 35, 25–32. [Google Scholar]
- Dong, M.; Yang, H.; Chen, T.Z. Multi-objective optimization design and numerical simulate-on of centrifugal pumps. China Rural. Water Hydropower 2019, 4, 154–157+161. [Google Scholar]
- Ye, X.D.; Li, H.; Ma, Q.Y.; Han, Q.B.; Sun, X.L. Optimal Design of Vortex Pump Using Approximate Model and the Non-dominated Sorting Genetic Algorithm. J. Irrig. Drain. 2019, 38, 76–83. [Google Scholar]
- Tong, Z.M.; Chen, Y.; Tong, S.G.; Yu, Y.; Li, J.F.; Hao, G.S. Multi-objective optimization design of low specific speed centrifugal pumps based on NSGA-III algorithm. China Mech. Eng. 2020, 31, 2239–2246. [Google Scholar]
- Jiang, B.X.; Yang, J.H.; Bai, X.B.; Wang, X.H. Optimization of centrifugal pump blade based on high-dimensional hybrid model and genetic algorithm. J. Huazhong Univ. Sci. Technol. (Nat. Sci. Ed.) 2020, 48, 128–132. [Google Scholar]
- Hao, Z.R.; Li, C.; Ren, W.L.; Wang, Y.; Hua, Z.L.; Liu, G. Optimization design of water jet pro-pulsion pump blade based on improved PSO algorithm. J. Irrig. Drain. Mach. Eng. 2020, 38, 566–570. [Google Scholar]
- Wang, M.C.; Yuan, J.P.; Li, Y.J.; Zheng, Y.H. Multi-objective optimization of mixed-flow pu-mp impeller based on 3-D inverse design. J. Harbin Eng. Univ. 2020, 41, 1854–1860. [Google Scholar]
- Siddique, M.H.; Afzal, A.; Samad, A. Design optimization of the centrifugal pumps via low fidelity models. Math. Probl. Eng. 2018, 2018, 3987594. [Google Scholar] [CrossRef]
- Alawadhi, K.; Alzuwayer, B.; Mohammad, T.A.; Buhemdi, M.H. Design and optimization of a centrifugal pump for slurry transport using the response surface method. Machines 2021, 9, 60. [Google Scholar] [CrossRef]
- Kim, J.H.; Oh, K.T.; Pyun, K.B.; Kim, C.K.; Choi, Y.S.; Yoon, J.Y. Design optimization of a centrifugal pump impeller and volute using computational fluid dynamics. IOP Conf. Ser. Earth Environ. Sci. 2012, 15, 032025. [Google Scholar] [CrossRef]
- Pei, J.; Wang, W.J.; Yuan, S.Q. Advanced Optimization Theory and Technology for Vane Pu-Mps; Science Press: Beijing, China, 2019. [Google Scholar]
- Ye, J.; Ge, L.D.; Wu, Y.X. An optimized RBF neural network for modulation recognition. J. Autom. 2007, 48, 652–654. [Google Scholar]
- Fang, K.T. A method for determining the dominance of factors in orthogonal tests with varying numbers of levels. Math. Pract. Aware. 1978, 01, 33–36. [Google Scholar]
- Wang, F.; Wang, X.J.; Sun, S.L. A reinforcement learning level-based particle swarm optimization algorithm for large-scale optimization. Inf. Sci. 2022, 602, 298–312. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Program Number | Number of Full Runner Grids (pc) | Relative Head | Relative Efficiency |
|---|---|---|---|
| 1 | 1,103,596 | 1.0152 | 1.0123 |
| 2 | 2,563,487 | 1.0000 | 1.0000 |
| 3 | 4,016,349 | 0.9956 | 0.9963 |
| 4 | 5,538,964 | 0.9931 | 0.9946 |
| Variables | Parameter Name | Unit | Low Level | High Level |
|---|---|---|---|---|
| X1 | Imported placement angle β1 | /° | 17 | 26 |
| X2 | Exit placement angle β2 | /° | 21 | 32 |
| X3 | Outlet width b2 | /mm | 8 | 12 |
| X4 | Blade wrap angle φ | /° | 77 | 116 |
| X5 | Impeller timing position | /° | 0 | 30 |
| X6~X11 | Virtual factors | — | — | — |
| Serial Number | Imported Placement Angle β1 | Exit Placement Angle β2 | Outlet Width b2 | Blade Wrap Angle φ | Impeller Timing Position |
|---|---|---|---|---|---|
| 1 | 1 | −1 | 1 | 1 | 1 |
| 2 | −1 | 1 | 1 | −1 | 1 |
| 3 | 1 | −1 | −1 | −1 | 1 |
| 4 | −1 | −1 | −1 | −1 | −1 |
| 5 | −1 | −1 | 1 | −1 | 1 |
| 6 | −1 | −1 | −1 | 1 | −1 |
| 7 | 1 | 1 | −1 | 1 | 1 |
| 8 | 1 | −1 | 1 | 1 | −1 |
| 9 | −1 | 1 | −1 | 1 | 1 |
| 10 | −1 | 1 | 1 | 1 | −1 |
| 11 | 1 | 1 | 1 | −1 | −1 |
| 12 | 1 | 1 | −1 | −1 | −1 |
| Serial Number | Imported Placement Angle β1 | Exit Placement Angle β2 | Outlet Width b2 | Blade Wrap Angle φ | Impeller Timing Position | Lift | Efficiency |
|---|---|---|---|---|---|---|---|
| 1 | 26 | 21 | 12 | 116 | 30 | 24.6248 | 77.9006 |
| 2 | 17 | 32 | 12 | 77 | 30 | 26.8351 | 68.1091 |
| 3 | 26 | 21 | 8 | 77 | 30 | 22.3482 | 75.5079 |
| 4 | 17 | 21 | 8 | 77 | 0 | 22.7505 | 75.1389 |
| 5 | 17 | 21 | 12 | 77 | 30 | 25.7977 | 69.4718 |
| 6 | 17 | 21 | 8 | 116 | 0 | 20.1328 | 78.2832 |
| 7 | 26 | 32 | 8 | 116 | 30 | 20.9667 | 77.3769 |
| 8 | 26 | 21 | 12 | 116 | 0 | 24.4402 | 77.9071 |
| 9 | 17 | 32 | 8 | 116 | 30 | 21.5795 | 76.9954 |
| 10 | 17 | 32 | 12 | 116 | 0 | 25.5931 | 75.923 |
| 11 | 26 | 32 | 12 | 77 | 0 | 27.0253 | 68.0776 |
| 12 | 26 | 32 | 8 | 77 | 0 | 23.176 | 74.292 |
| Factors | Sum of Squares (%) | Coefficient Assessment | Standard Error | p-Value |
|---|---|---|---|---|
| Imported placement angle β1 | 0.0010 | −0.0090 | 0.1078 | 0.9365 |
| Exit placement angle β2 | 2.15 | 0.4235 | 0.1078 | 0.0077 |
| Outlet width b2 | 45.48 | 1.95 | 0.1078 | <0.0001 |
| Blade wrap angle φ | 9.36 | −0.8830 | 0.1078 | 0.0002 |
| Impeller timing position | 0.0777 | −0.0805 | 0.1078 | 0.4834 |
| Factors | Sum of Squares (%) | Coefficient Assessment | Standard Error | p-Value |
|---|---|---|---|---|
| Imported placement angle β1 | 4.25 | 0.5951 | 0.4218 | 0.2080 |
| Exit placement angle β2 | 15.04 | −1.12 | 0.4218 | 0.0378 |
| Outlet width b2 | 34.02 | −1.68 | 0.4218 | 0.0072 |
| Blade wrap angle φ | 95.14 | 2.82 | 0.4218 | 0.0005 |
| Impeller timing position | 1.51 | −0.3550 | 0.4218 | 0.4322 |
| Sample Serial Number | Exit Placement Angle β2 | Outlet Width b2 | Blade Wrap Angle φ | Lift | Efficiency |
|---|---|---|---|---|---|
| 1 | 17 | 9.8 | 102 | 22.8017 | 78.5818 |
| 2 | 17.5 | 12 | 74 | 26.1444 | 69.28 |
| 3 | 18 | 14.2 | 120 | 26.4369 | 75.7106 |
| 4 | 18.5 | 9 | 92 | 22.6546 | 77.6523 |
| 5 | 19 | 11.2 | 64 | 25.2747 | 66.4328 |
| 6 | 19.5 | 13.4 | 110 | 26.2874 | 75.0112 |
| 7 | 20 | 8.2 | 82 | 22.5566 | 75.7508 |
| 8 | 20.5 | 10.4 | 128 | 22.1592 | 78.9182 |
| 9 | 21 | 12.6 | 100 | 25.939 | 74.0439 |
| 10 | 21.5 | 14.8 | 72 | 28.869 | 65.9174 |
| 11 | 22 | 9.6 | 118 | 22.0847 | 78.8892 |
| 12 | 22.5 | 11.8 | 90 | 25.7813 | 72.795 |
| 13 | 23 | 14 | 62 | 28.5728 | 63.9778 |
| 14 | 23.5 | 8.8 | 108 | 22.055 | 78.5192 |
| 15 | 24 | 11 | 80 | 25.2196 | 71.7224 |
| 16 | 24.5 | 13.2 | 126 | 25.5187 | 76.7383 |
| 17 | 25 | 8 | 98 | 22.0859 | 77.8786 |
| 18 | 25.5 | 10.2 | 70 | 24.7811 | 68.9254 |
| 19 | 26 | 12.4 | 116 | 25.5758 | 76.5512 |
| 20 | 26.5 | 14.6 | 88 | 28.426 | 68.8344 |
| 21 | 27 | 9.4 | 60 | 24.4149 | 66.6407 |
| 22 | 27.5 | 11.6 | 106 | 25.3771 | 75.8033 |
| 23 | 28 | 13.8 | 78 | 28.1632 | 67.3917 |
| 24 | 28.5 | 8.6 | 124 | 21.1633 | 77.6949 |
| 25 | 29 | 10.8 | 96 | 24.7257 | 75.1141 |
| 26 | 29.5 | 13 | 68 | 27.7594 | 66.0542 |
| 27 | 30 | 7.8 | 114 | 20.9093 | 77.4695 |
| 28 | 30.5 | 10 | 86 | 24.6849 | 73.2271 |
| 29 | 31 | 12.2 | 58 | 27.6284 | 63.4781 |
| 30 | 31.5 | 14.4 | 104 | 27.8102 | 71.8061 |
| 31 | 32 | 9.2 | 76 | 24.5471 | 72.6405 |
| 32 | 32.5 | 11.4 | 122 | 24.3591 | 76.2711 |
| 33 | 33 | 13.6 | 94 | 27.5183 | 70.6124 |
| 34 | 33.5 | 8.4 | 66 | 24.0505 | 70.2596 |
| 35 | 34 | 10.6 | 112 | 24.1895 | 76.5615 |
| 36 | 34.5 | 12.8 | 84 | 27.1259 | 68.3395 |
| 37 | 35 | 15 | 130 | 27.3392 | 74.5881 |
| Serial Number | Exit Placement Angle β2 | Outlet Width b2 | Blade Wrap Angle φ | Lift | Error | Efficiency | Error | ||
|---|---|---|---|---|---|---|---|---|---|
| Calculated Value | Predicted Value | Calculated Value | Predicted Value | ||||||
| 1 | 17 | 10 | 102 | 23.3586 | 23.0377 | −1.38% | 76.9654 | 77.7294 | 0.99% |
| 2 | 27.5 | 12.2 | 72 | 26.6137 | 26.8979 | 1.07% | 66.8634 | 67.6188 | 1.13% |
| 3 | 23 | 11 | 98 | 24.7361 | 24.601 | −0.55% | 74.3373 | 75.3969 | 1.43% |
| Models | Lift (m) | Efficiency (%) |
|---|---|---|
| Initial model | 24.2396 | 75.3835 |
| Individuals with optimum head | 29.3740 | 61.1736 |
| Optimal efficiency individual | 19.6603 | 80.9638 |
| Structural Parameters | Exit Placement Angle β2 | Outlet Width b2 | Blade Wrap Angle φ |
|---|---|---|---|
| Initial model | 27 | 10 | 97 |
| Individuals with better head | 17 | 15 | 122 |
| Individuals with better efficiency | 17 | 13 | 130 |
| Models | Lift (m) | Efficiency (%) |
|---|---|---|
| Initial model | 24.2396 | 75.3835 |
| Individuals with better head | 26.8926 | 74.7845 |
| Individuals with better efficiency | 24.8755 | 77.6431 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.-M.; Gao, X.-G.; Pan, Y.; Jiang, B. Multi-Objective Parameter Optimization of Submersible Well Pumps Based on RBF Neural Network and Particle Swarm Optimization. Appl. Sci. 2023, 13, 8772. https://doi.org/10.3390/app13158772
Liu Z-M, Gao X-G, Pan Y, Jiang B. Multi-Objective Parameter Optimization of Submersible Well Pumps Based on RBF Neural Network and Particle Swarm Optimization. Applied Sciences. 2023; 13(15):8772. https://doi.org/10.3390/app13158772
Chicago/Turabian StyleLiu, Zhi-Min, Xiao-Guang Gao, Yue Pan, and Bei Jiang. 2023. "Multi-Objective Parameter Optimization of Submersible Well Pumps Based on RBF Neural Network and Particle Swarm Optimization" Applied Sciences 13, no. 15: 8772. https://doi.org/10.3390/app13158772
APA StyleLiu, Z.-M., Gao, X.-G., Pan, Y., & Jiang, B. (2023). Multi-Objective Parameter Optimization of Submersible Well Pumps Based on RBF Neural Network and Particle Swarm Optimization. Applied Sciences, 13(15), 8772. https://doi.org/10.3390/app13158772