Abstract
Robotic solutions and technological advances for turf management demonstrated excellent results in terms of quality, energy, and time consumption. Two battery-powered autonomous mowers (2 WD and 4 WD) with random patterns were evaluated according to different trampling levels (control, low, medium, high) on a typical warm season turfgrass at the DAFE, University of Pisa, Italy. Data on the percentage of area mowed, the distance traveled, the number of passages, and the number of intersections were collected through RTK devices and processed by a custom-built software (1.8.0.0). The main quality parameters of the turfgrass were also analyzed by visual and instrumental assessments. Soil penetration resistance was measured through a digital penetrometer. The efficiency significantly decreased as the trampling level increased (from 0.29 to 0.11). The over-trampled areas were mainly detected by the edges (on average for the medium level: 18 passages for the edges vs. 14 in the central area). The trampling activity caused a reduction in turf height (from about 2.2 cm to about 1.5 cm). The energy consumption was low and varied from 0.0047 to 0.048 kWh per cutting session. Results from this trial demonstrated suitable quality for a residential turf of the Mediterranean area (NDVI values from 0.5 to 0.6), despite the over-trampling activity. Soil penetration data were low due to the reduced weight of the machines, but slightly higher for the 4 WD model (at 5 cm of depth, about 802 kPa vs. 670 kPa).
1. Introduction
A challenge of managing turfgrass is to maintain high quality for the intended use [1]. Both turfgrass visual and functional quality are strongly dependent on the management practices and intensities adopted. If properly conducted, mowing can significantly improve turf quality, and its effect is defined by three main components: height of cut, frequency of cut, and mower type [2]. Plants response to the biomass removal resulting from mowing is a key aspect of high-quality turfgrass maintenance [3]. However, achieving adequate turfgrass quality performance according to different contexts is dependent on the turf species, cultivars, and mowing technology [4]. Technology advances achieved in automation and precision agriculture techniques for turf management are becoming more popular and user-friendly. Robot mowers demonstrated to provide many additional advantages, such as saving human labor, reducing local pollutants, and avoiding potential injuries and exposure to dust from mowing [5,6]. Robot mowers conduct repetitive operations with minimal human interaction [7]. The repetitive activity of autonomous mowers is critical in maintaining greenspaces, which must be mowed for extended periods of time to provide a continuous covering of the areas. The complicated shape and pattern of urban and ornamental areas may increase working time, especially for the autonomous mower with a random pattern, resulting in a non-homogeneous cut and increased energy consumption [8]. An additional issue in greenspace maintenance is the presence of buildings and trees, which can lead to an increase in working time due to GPS signal loss and the associated decreased positioning accuracy [9].
Studies have been conducted to understand how autonomous mowers (AMs) affect turfgrass management and different establishments, turf architecture, and competition with weeds. In general, autonomous mowers constant activity has been shown to improve turf quality by enhancing turf density, decreasing weed incidence, and improving leaf texture (in general smaller and finer) [10]. In addition, continuous mechanical stress and trampling damage attributed to autonomous mowers are challenging factors for turfgrass quality [11].
In this regard, Martelloni et al. [12] and Sportelli et al. [11] analyzed fundamental parameters related to the random trajectories. The Real Time Kinematic navigation system was very helpful to better understand the effective impact of autonomous mowers trampling damages and soil compaction. The data obtained were analyzed with the custom-built software “Robot mower tracking data calculator” version 1.7.0.0. (Qprel s.r.l., Pistoia, Italy) to calculate the autonomous mower overlapping, trajectories, number of passages, percentage of area mowed, and correlated turfgrass stress and soil compaction [13]. According to Qiang et al. [14], trampling damages deriving from mechanical stress and soil compaction are key aspects of turfgrass maintenance. Soil compaction is recognized as one of the major traffic problems on turfgrass, which could affect the visual parameters of turf quality. It also compromises the soil assessment and its pores space composition with a series of problems connected. The degree of soil compaction created by vehicular traffic depends on speed, the surface contact area with the soil, and the weight [15].
Poor management practices, disease, and extreme environmental conditions could facilitate weed encroachment, thus reducing turf quality. A more environmentally friendly strategy for turfgrass management should be implemented, considering the green area itself and species biology and ecology in order to optimize inputs and operations effects [1,2]. Sportelli et al. [16] demonstrated how accurate planning of greenspaces and a suitable maintenance operations schedule lead to time, energy, and money savings, and in some cases, improved turfgrass aesthetic and functional quality. Residential lawns are generally characterized by low management (low water, low fertilizer, low mowing frequency, and no pest management), and ensuring good quality in these contexts is not simple. For these reasons, autonomous mowers initially were meant exclusively for residential lawns, in which the management aims to satisfy aesthetic and functional needs [17]. These machines are becoming more popular among private customers who have no experience in turf management, but desire to have properly managed turfgrass, together with low time and energy consumption [13].
This study aimed to explore the residential lawn quality of four different mowing frequencies using two different autonomous mowers. Such turf composition (a hybrid bermudagrass and a spontaneous species) represents a common association in small-size residential turf in a Mediterranean area, which could give high aesthetic and functional benefits to the customer if managed properly and optimally. This study also evaluated the turfgrass response to different levels of over-trampling, which can be a common issue with fast-growing warm-season turfgrass and robot mowers with random trajectories. All the operative and qualitative parameters considered provide the creation of a case study for long-term automated maintenance for common users of residential green areas, demonstrating the effectiveness of automated mowing in promoting the establishment of selected species on the spontaneous ones.
2. Materials and Methods
The trial was carried out at the Centre for Research on Turfgrass for Environment and Sports (CeRTES) of the Department of Agriculture, Food, and Environment of the University of Pisa (San Piero a Grado, Pisa, Italy—43°40′ N, 10°19′ E, 6 m a. s. l.). The trial was performed on a bermudagrass (Cynodon dactylon × Cynodon transvaalensis cv ‘Patriot’) mature stand severely infested with dallisgrass (Paspalum dilatatum Poir.). Both species’ initial cover was visually estimated to be around 48% for bermudagrass and 51% for dallisgrass. The turfgrass was established on a plot of calcaric fluvisol, which had a coarse silty texture (mixed, thermic, typic xerofluvents with a pH of 7.8 and 2.2% organic matter). Since April 2020, the whole area of 400 m2 was managed with a Husqvarna Automower® 535 AWD (Husqvarna AB, Stockholm, Sweden), with a height of cut of 5 cm, 3 h per day and 3 days per week. Irrigation and fertilization were applied as necessary, and no weed or pest control were performed. The amount of water irrigation was provided only to supplement rainfall and to avoid any potential turfgrass stress. The weather conditions during the test period were collected from the local weather station, with a focus on September and October 2021, San Piero a Grado (PI) (Table 1). The workflow diagram of the research is showed in Figure 1.

Table 1.
Weather conditions of the trial period.
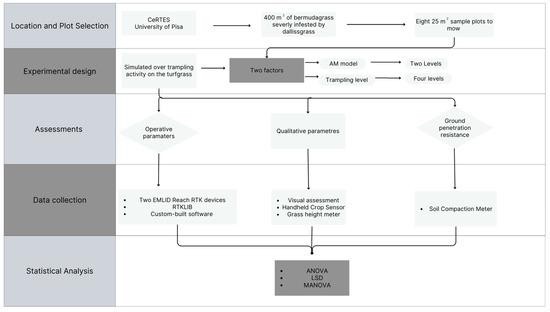
Figure 1.
Workflow diagram of the research (Robot mower tracking data calculator” version 1.8.0.0.).
2.1. Experimental Field Trials
From September to October 2021, 8 sample plots of 25 m2 were identified within the larger area above mentioned. The plots were selected in order to ensure that turf characteristics were balanced among the selected areas. The main factor was the autonomous mower model with random trajectories (two levels: Husqvarna Automower® 450X and Husqvarna Automower® 535 AWD), while the second factor was the trampling level (four levels: working schedule set to work for 10, 30, 60, and 90 min). The working time of 10 min was chosen as the control trampling level since it represents the theoretical right time to manage every plot with random operating AM. In fact, according to the manufacturer operator’s manual, the hourly work capacity of both autonomous mowers was significantly greater than the effective work areas available. These trampling levels were selected to simulate the continuous and repetitive mowing activity achieving an over-trampling activity on the turfgrass. The short trial duration of 26 days was chosen specifically to fulfil its main objective: to analyze the operational performances of two different autonomous mowers (AMs) and their associated trampling activity on a standard turfgrass preceding dormancy.
The two autonomous mowers were set to work for a different amount of time in each area. A total of four trampling levels were calculated and set based on the hourly work capacity of the two autonomous mowers (Table 2). For simplicity, the four trampling levels for each autonomous mower were called Control, Low, Medium, and High level.
Table 2.
Autonomous mowers (AMs) operative characteristics.
The Control trampling level for the AM 450X was obtained by leaving the AM working for 7 min in the studied area, while for the AM 535, it was obtained by leaving the AM working for 10 min in the studied area. For simplicity, Control trampling levels for both autonomous mowers were set at 10 min. The Low trampling level was obtained by leaving both AMs working for 30 min; the Medium trampling level was obtained by leaving both AMs working for 60 min; the High trampling level was obtained by leaving both AMs working for 90 min. The robot mowers worked following random trajectories, with an average speed of 0.62 m s−1 and a cutting disk revolving speed of 2300 rpm.
The base stations were placed 10 m away from each other. The plots were delimited by a boundary wire that generated an electromagnetic field perceived by the autonomous mowers as the edge of the garden. The boundary wire delimiting the different plots was positioned and fixed to the surface with stakes to ensure 20 cm of a corridor between plots to prevent the robot from mowing in the wrong area during the assessment. Before starting the trial, the studied areas were mowed at 3.7 cm with a walk-behind battery mower to guarantee uniform starting conditions. Then, the 2 autonomous mowers were set to work 5 days per week with a height of cut of 3.5 cm.
2.2. Assessments
For a total of 26 days (from 13 September to 14 October 2021), the turf height in each plot was measured using a grass height meter after every mowing event. Preliminary observations suggested that the height differed in the central area and at the corners. This led to three measurements at the corners and three measurements at the central point being taken on each plot (with three sub-repetitions). Data on the percentage of area mowed, the distance traveled, the number of passages, and the number of intersections were collected through two Emlid Reach RTK (Emlid Tech Kft., Budapest, Hungary) devices mounted inside two custom-made cases (the rover and the base, which were extensively described by Martelloni et al. [12]) to establish the remote sensing system. The data obtained were extracted and processed first by RTKLIB (version 2.4.3), then by the custom-built software “Robot mower tracking data calculator” version 1.8.0.0. (Qprel s.r.l., Pistoia, Italy). To determine whether there were preferential ways, the number of passages taken by the robots along their trajectories was also analyzed according to the cutting time and position, that is, passages in the center, the edge, and the corner of the plots, for several replicates equal to three for each position. On 14 and 22 September and 8 October, the tracker was used on the AM 450X; on 15 and 21 September and 8 October, it was used on the AM 535 AWD.
The distance traveled as an operating parameter was used to calculate the equation of working efficiency:
Work Efficiency = Actual Cut Surface/Theoretical Cut Surface
Turf quality and color were visually assessed. Color values and turf quality were assigned based on a 1–9 colorimetric scale, with 1 for a light shade of green (very light green), 6 for an acceptable shade of green (acceptable green), and 9 for a dark shade of green (very dark green) [18]. Turf’s quality 1–9 scale was adopted according to Caturegli et al. [19], with 1 for “bad” quality turf, 6 for “acceptable” quality turf, and 9 for “outstanding” quality turf. The visual quality of the turfgrass was tested by measuring the Normalized Vegetation Index (NDVI) with a portable harvest sensor called a Handheld Crop Sensor (HCS—GreenSeeker, Model HSC-100, Trimble Navigation Unlimited, Sunnyvale, CA, USA). The protocol described by Caturegli et al. [19] was followed, and it provided the NDVI value automatically calculated by the standard equation, where the reflectance in the red band (R) is correlated with the reflectance in the near-infrared (NIR):
NDVI = ((NIR) − R)/((NIR) + R)
The final surveys were conducted on 18 and 19 October 2021. Replication was threefold.
Information on the resistance of soil penetration was gathered by the penetrometer (SC 900 Soil Compaction Meter, Fieldscout, Spectrum Technologies Inc., Aurora, IL, USA). Overall, 9 replicates were conducted to assess the ground penetration resistances at 5 different depths: 0.0 cm (surface), 2.5 cm, 5.0 cm, 7.5 cm, 10.0 cm.
2.3. Statistical Analysis
The autonomous mowers data of the distance traveled, the percentage of area mown, the number of passages, the number of intersections, and the value of working efficiency were analyzed with analysis of variance (ANOVA). Further, the turf height, the visual parameter of the turf (color and quality), and the NDVI values were analyzed with the ANOVA test. Data were analyzed using the statistical software R (version 2.4.2, R Core Team, Vienna, Austria). The Shapiro–Wilk test was used to settle data normality, and Levene’s test for homoscedasticity (package “car”). The data were transformed with a square root transformation, when necessary, to respect the normality assumption. The post hoc LSD (Least Significant Difference) test at 0.05 of probability was carried out through the package “agricolae”. In this study, the percentage of area mown, the number of passages, the distance traveled, and the working efficiency were evaluated as a function of trampling level and robot model. Trampling level was used as a factor with 4 levels, robot model as a factor with 2 levels. The data regarding the soil penetration resistance were analyzed with multivariate analysis of variance (MANOVA), adopting the following factors in the model: trampling level, robot model, and their interaction. Data were analyzed using the statistical software SPSS (IBM Corp. Released 2019, Version 26.0. Armonk, NY, USA: IBM Corp.). Wilks’ lambda, Pillai’s trace, Hotelling’s trace, and Roy’s largest root were calculated to assess how the model terms contribute to the overall covariance.
3. Results
3.1. Operative Parameters Analysis
Analysis of variance (two-way ANOVA) revealed that the autonomous mower model had a significant effect on the distance traveled (p = 1.337 × 10−9) and work efficiency (p = 2.046 × 10−13) and on the intersections (p = 0.012) (Table 3). The trampling level had a significant effect on all dependent variables, which are distance traveled (p < 2.2 × 10−16), area mowed (p < 2.0 × 10−16), intersections (p = 2.67 × 10−15), and work efficiency (p = 2.34 × 10−14). Significant interactions were obtained between AM model and trampling level on the number of intersections (p = 0.045) and on the work efficiency (p = 4.87 × 10−6).
Table 3.
Results of two-way ANOVA testing the effects of AM model, trampling level, and their interaction on the percentage of area mowed and the distance traveled by the AM.
The mean value of the work efficiency in the function of AM model and trampling level revealed how the work efficiency decreased when the trampling level increased (LSD: 0.016). Higher work efficiency was detected in plots mowed by AM 450 AWD.
Regarding the number of intersections, a different trend was detected. The mean value of the number of intersections in the function of the AM model and trampling level revealed how the number of intersections increased when the trampling level increased (LSD: 3169.23). A higher number of intersections was detected in plots mowed by AM 535 AWD compared to 450X, with significantly different mean values in the correspondence of the trampling level of 90 min (36,205 vs. 30,163).
The results of these analyses are visually presented in Figure 2.
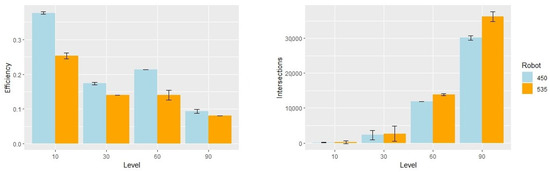
Figure 2.
Mean value of intersections and work efficiency (Efficiency) in function of autonomous mower model (Robot) and trampling level (Level). Standard error is also visualized.
Analysis of variance (three-way ANOVA) revealed that the independent variables of trampling level (p < 2.2 × 10−16) and position (p = 2.10 × 10−5) and the interaction between trampling level and position significantly affected the number of passages (p = 0.002), as the interactions between AM model and trampling level (p = 1.75 × 10−6). The independent variables of trampling level (p < 2.2 × 10−16) and position (p < 2.2 × 10−16), the interaction between AM model and trampling level (p = 1.015 × 10−6), and the interaction among AM model, position, and trampling level (p = 0.009) significantly affected the height of turfgrass.
Results are shown in Table 4.
Table 4.
Results of three-way ANOVA testing the effects of AM model, trampling level, position, and their interaction on the number of passages and turf height.
The mean value of the number of passages in the function of trampling level and position (LSD: 3.40) revealed a homogeneous trend, except for the first 10 min: the highest number of passages was detected always in the edges of the plots for each trampling level. A significant difference in terms of number of passages was observed between the central area and the edge (on average for the Medium level: 18 passages for the edges and 14 in the central area).
The mean value of the number of passages in the function of trampling level and robot model revealed how the number of passages increased when the trampling level increased (LSD: 2.33). A higher number of passages was detected in plots mowed by AM 535 AWD after the first 10 min. Significantly different mean values were detected in plots mowed for 30 min between the 2 mowers (13.30 by AM 535 AWD vs. 9.78 by AM 450 X) and in plots mowed for 60 min (17.74 by AM 535 AWD and 13.26 by AM 450X).
The results of the passages analyses are visually presented in Figure 3.
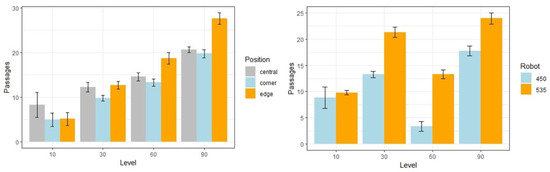
Figure 3.
Mean value of Passages in function of autonomous mower model (Robot) and trampling level (Level) and trampling level (Level) and position. Error bars represent standard errors.
The results of these analyses are visually presented in the custom-built software colorimetric maps (Figure 4) from the Control trampling level to the High one. As can be seen, the area mown increased progressively, and as the trampling level increased, the edges were visibly more trampled.
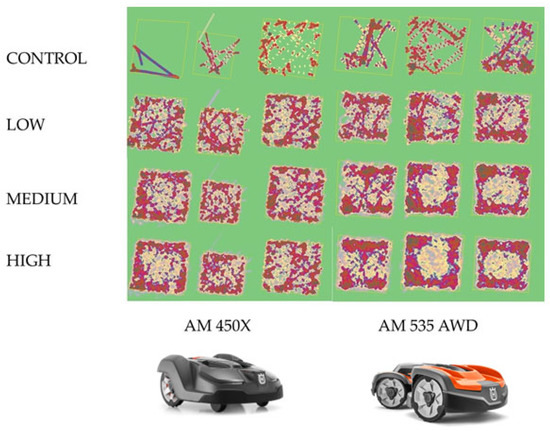
Figure 4.
Colorimetric maps showing the number of passages and the trajectories of the two different autonomous mowers (different replications). Dark areas mean higher trampling.
The mean value of height in the function of trampling level and position revealed a homogeneous trend (LSD: 0.15), with higher values of height in the corners and no significant differences in the central area after 60 min (1.32 cm) and 90 min (1.37 cm) of mowing.
The mean value of height in the function of AM model and trampling level revealed how the height decreased when the trampling level increased (LSD: 0.14). The height values averaged over the days showed significant differences between the AM models at each trampling level, except for the trampling level of 60 min (on average 1.7 cm).
The results of the height analyses are visually presented in Figure 5.
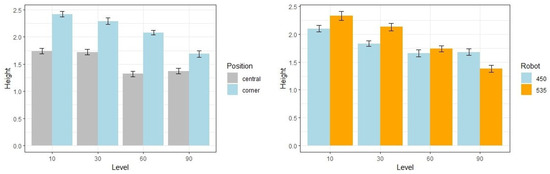
Figure 5.
Mean value of height in function of autonomous mower model (Robot) and trampling level (Level) and trampling level (Level) and position. Error bars represent standard errors. Data were averaged over days and repetitions.
No further statistics analysis was conducted on the operative performance of the autonomous mowers, but the data about the trampling level allow us to calculate the electric energy consumption of the autonomous mowers; it was calculated considering the lower value of the range reported in the manual (because of the minimum height of the turfgrass) (Table 5).
Table 5.
Electric energy consumption for each cutting session level and for the two different autonomous mowers.
3.2. Qualitative Parameters Analysis
Analysis of variance (two-way ANOVA) revealed that the interaction between AM model and trampling level significantly affected color (p < 2.2 × 10−16), quality (p < 2.2 × 10−16), and NDVI (p < 0.01) (Table 6).
Table 6.
Results of two-way ANOVA testing the effects of AM model, trampling level, and their interaction on color, quality, and NDVI.
The mean value of qualitative parameters in the function of AM model and trampling level revealed how all parameter values decreased when the trampling level increased. General observation makes it evident how color, quality, and NDVI values are higher in plots mowed by AM 535 AWD.
As for the color analysis, more significant differences were detected in plots mowed by AM 535 AWD between each trampling level, and the lowest color value (3.50) was detected in the plot mowed by AM 450X with a High trampling level. No differences in the quality values were detected between Medium and High trampling levels in plots mowed by AM 535 AWD, as in the plots mowed by AM 450X.
An evident variability, instead, was detected in the NDVI analysis, where all values were different from each other (Table 7).
Table 7.
Mean value of color, quality, and NDVI in function of autonomous mower model and trampling level.
To better visualize the variation of NDVI and color, Figure 6 illustrates their values evolution along the studied period for the different treatments.
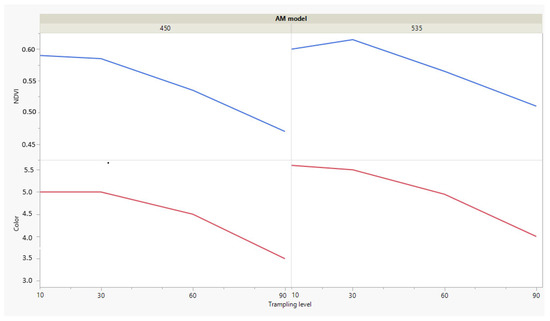
Figure 6.
Variation of NDVI and color values at the different trampling levels. Different colors (blue for NDVI and red for Color) were used to better visualize the two types of parameters indagated.
3.3. Soil Penetration Resistance Analysis
The multivariate analysis of variance conducted on the values of soil penetration resistance revealed significant differences (p < 0.05) between AM models at every depth, except for 10 cm (Table 8). From Table 9, it is evident that AM 535 AWD caused slightly higher compaction than AM 450X.
Table 8.
Mean square, F value, p value of MANOVA conducted on soil penetration resistance data.
Table 9.
Comparison between the average value of soil penetration resistance after the two AMs trampling activity at five different depths.
4. Discussion
4.1. Autonomous Mowers Performances
The analysis of the working schedule of the two AMs gave results in terms of distance traveled, the percentage of area mowed, and intersections, all useful data to evaluate the different work efficiency of the AMs in the same field conditions. Operative data of the distance traveled and area mowed were not affected by the interaction of AM model and trampling level, but they were fundamental data to assess the work efficiency in terms of covered area. It resulted in being significantly affected by both independent variables and their interaction. A better work efficiency resulted in the plot mowed by AM 450 due to the operative performance of this model, which results in a higher hourly work capacity than the AM 535 AWD. An opposite trend was observed for the intersections, which resulted in being evidently higher in plots mowed by the AM 535 AWD from the Medium trampling level. This result is directly connected with the percentage of area mowed, which resulted in being higher in the plots mowed by 450 AWD due to the lower overlapping, but with higher distance traveled. Another relevant aspect that contributes to reaching a higher percentage of area mowed in the same working time is the larger working width of 450X (24 cm) compared to the 535 AWD one (22 cm). These findings are according to Bosse et al. [20] findings, which suggested how a larger working width could improve the autonomous mowers’ working efficiency. It is necessary to highlight how the operative performance of random trajectory machines is not very efficient in terms of the percentage of area mowed, but this lack of efficiency is countered by the high frequency of mowing events. In this regard, interesting results were obtained about passages, which, according to previous studies, are strongly correlated with the number of intersections [12]. In fact, as in the previous analysis, the number of passages resulted in being higher in plots mowed by AM 535 AWD from the Low trampling level, and it might be connected to the AM 535 AWD pivoting rear body, which allowed it to perform more complex and articulated maneuvers than the AM 450X on the same limited area. Evident differences were found among the different zones inside the plots; the highest number of passages was always found on the edges of the plots, except for the control trampling level of 10 min, which revealed a higher number of passages in the central zone. The shape of the plots, together with their small area, contributed to increasing the probability that the robot encountered the boundary wire and made a high number of maneuvers to change direction [12,13]. The operative parameters were studied extensively using the high-accuracy RTK-GPS system; however, the system encountered issues with GPS signal loss, which could hinder potential practical applications of RTK-GPS systems in AM path planning. According to Huang et al. [9], an automatic mower based on differential GPS and IMU could play a crucial role in further enhancing positioning accuracy and improving AM performance.
The daily recorded data of cutting height demonstrate how the height trend changed, depending on whether measurements were taken in the center or the corners. In general, turf height was higher in the corners compared to the center. This may be because robots were forced to work in a small area and encountered the boundary wire many times during the working period. When the robot mower detects the boundary wire, it stops, changes course, and then continues its work. Consequently, the robot mower managed the corners without cutting (since the cutting disk stopped rotating together with the robot mowers). As is visible in Figure 4, differences were detected also between the two autonomous mowers with the same trampling level; it is due to the constrictive characteristic. In fact, both cutting disks were set at the same height, and after the first period of effective cutting, the canopy folding due to the autonomous mowers’ repeated and continuous passages was measured, rather than its effective height.
4.2. Autonomous Mowers Activity Effects on Turfgrass Quality Parameters
Researchers, greenkeepers, and industry experts all have a growing interest in how mowing techniques affect turf physiology and its connected quality. According to Monteiro [21], a challenging topic might be how fluctuations in turf height and the linked leaf area caused by frequent and intense mowing may positively affect the light extinction coefficient and contribute to obtaining a higher turf quality. The key roles of lawn areas in residential and urban zones are due to their multifunctional services provided. Besides the aesthetic and recreational roles, environmental benefits are also recognized: turfgrasses have higher potential than other types of vegetation as an ecological buffer for reducing runoff, purifying water and air, controlling erosion and fire hazards, improving soil quality, reducing noises, and absorbing radiation [22,23].
The High trampling level did not require a consistent amount of energy due to the high efficiency of the electric motors of the autonomous mowers and the mowing strategy of cutting small leaves clippings with high frequency. For this reason, the efficiency of these machines should be considered in the long term since AMs work every day.
The intense and continuous mowing of the robot increases the quality of the turf, and it promotes species that are tolerant to low cutting and high traffic levels and with a short and creeping habitus [17,24]. Indeed, autonomous mowers may be a sustainable choice to obtain environmentally adapted, traffic-resistant, and highly sustainable turfgrass management. These findings demonstrate how, particularly for randomly operated autonomous mowers, the proper cutting time choices may be essential to consistently save energy over an extended period. Indeed, it is well known that random operating autonomous mowers require more work to manage a given area, due to the frequent overlapping, compared to autonomous mowers’ working following systematic trajectories. The qualitative results of this trial showed an acceptable overall quality rate for a Mediterranean residential turf. These results highlighted how non-professional turf quality may be increased by continuous mowing activity. The AM 535 AWD four-wheel drive model, which lacked pivoting wheels, had higher mean quality values, with all quality measures showing a similar trend. The AM 535 AWD’s four active wheels prevented these parts from being dragged on the ground (as happened with the 450X model), reducing stress on the turf within small areas. The literature presents contrasting opinions about the mowing frequency and turf quality relation. The typical trend of quality parameters declines with the reduction of leaf tissue caused by repeated and protracted mowing [17]. According to Grossi et al. [25], reductions in turf quality are correlated with a lower vegetation index due to the reduced photosynthetic rate. The color and quality trends in this study are also in line with the NDVI trend, which showed lower values in correlation with increased trampling levels.
Yousfi et al. [26] have emphasized the efficiency of vegetation indices in detecting turfgrass performance under various growing conditions. Building upon their findings, it would be beneficial to conduct extended studies that investigate additional vegetation indices, such as the green area (GA), and assess their correlation with soil moisture content after prolonged trampling activity by AMs. By examining these factors over a longer trial period, we can gain deeper insights into the impact of AM operations on turfgrass health and water availability in the soil.
Compared to turfgrasses mowed with rotary mowers once a week, continuous mowing helps to maintain a high degree of photosynthesis and carbohydrate generation for new tissue growth and higher quality. According to Pirchio et al. [17] and Krans and Beard [27], a robot mower that works many times a week removes only a small amount of leaf tissue at a time. The acceptable quality may be attributed to the effect of grasscycling that happened because of continuous mowing [28]. In this regard, Schiavon et al. [29] discovered an increase in visual quality in bermudagrass through returned clippings towards the end of the growing season, as did this trial period.
Referring to the soil compaction, the autonomous mowers’ activity seemed to slightly affect only the first 7.5 cm of soil. No visible significant differences between AMs were detected. The major compaction operated by AM 535 AWD could be due to the major weight of 17.0 kg compared to the 13.9 kg of AM 450X. The general not-high penetration resistance is in line with the quality results obtained. According to Carrow and Petrovic [15], soil compaction is one of the indirect stresses more difficult to study than other ones. The soil compaction, indeed, can affect the turf quality because of the reduction of shoot density and higher susceptibility to indirect and direct high-temperature stress.
5. Conclusions
This trial highlights how different AMs and different mowing schedules affect turf characteristics related to both qualitative and ground parameters. Both AMs showed satisfactory performance for residential turf, with slightly better qualitative results obtained in the plots mowed by Automower® 535 AWD.
This mowing method has been shown to ensure the quality of turfgrass even close to the dormancy period. Autonomous mowers are effective tools for obtaining reliable results for the maintenance of the height at a certain value. This trial demonstrated how autonomous mowers are a management solution that could enhance turfgrass quality, while also benefiting some species, without affecting the soil structure.
All the results obtained could be the starting point for future possible longer trials regarding turfgrass maintenance:
- -
- enhancement of AMs positioning accuracy testing and comparing different positioning systems;
- -
- the selection of local species suitable for turfgrass mowed by AMs;
- -
- further tests may be conducted at different times of the year (ideally in the late spring) to confirm any results from the instrumental analysis that are more visible and realistic;
- -
- more extended studies on biological parameters through different vegetation indices;
- -
- testing other responses to the same trampling levels using autonomous mowers with a systematic pattern, which may produce more accurate trampling values.
Author Contributions
Conceptualization, M.F., M.V., S.M. and V.F.; methodology, M.F., V.F., S.M.L. and S.M.; validation, A.P., M.R., L.C. and G.S; formal analysis, V.F. and S.M.L.; investigation, G.S., S.M.L. and L.C.; resources, M.F.; data curation, S.M.L. and M.S.; writing—original draft preparation, S.M.L. and M.S.; writing—review and editing, S.M.L., M.S. and C.F.; visualization, C.F.; supervision, L.G., L.C. and M.S.; project administration, M.F.; funding acquisition, M.F. and M.V. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors sincerely thank Husqvarna AB, Sweden, for providing the machines and Lorenzo Greci and Romano Zurrida from DAFE for their technical assistance.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Pantaloni, M.; Marinelli, G.; Santilocchi, R.; Minelli, A.; Neri, D. Sustainable Management Practices for Urban Green Spaces to Support Green Infrastructure: An Italian Case Study. Sustainability 2022, 14, 4243. [Google Scholar] [CrossRef]
- Mcelroy, S.; Magni, S.; Caturegli, L.; Sportelli, M.; Sciusco, G.; Fontanelli, M.; Volterrani, M. Autonomous Mowers Will Change the Rules of Mowing. Golf Course Manag. Online. 2022. Available online: https://gcmonline.com/course/environment/news/autonomous-mowers (accessed on 26 June 2023).
- Staněk, L.; Krajíček, T.; Dvořák, T. Suitability of Using Mechanization Means for the Maintenance of Grass Stands by the Method of Mulching. Acta Univ. Agric. Et Silvic. Mendel. Brun. 2022, 70, 83–95. [Google Scholar] [CrossRef]
- Owen, M.C.; Lanier, J.D. Best Management Practices for Lawn and Landscape Turf, Version 1.51; Umass Extension: BMPs for Lawn Landscape Turf. 2016. Available online: http://extension.umass.edu/turf (accessed on 26 June 2023).
- Hicks, R.W.; Hall, E.L. A Survey of Robot Lawn Mowers. In Proceedings of the Intelligent Systems and Smart Manufacturing, Boston, MA, USA, 5–8 November 2000. [Google Scholar] [CrossRef]
- Yue, C.; Wang, J.; Watkins, E.; Bonos, S.A.; Nelson, K.C.; Murphy, J.A.; Meyer, W.A.; Horgan, B.P. Heterogeneous Consumer Preferences for Turfgrass Attributes in the United States and Canada. Can. J. Agric. Econ. 2017, 65, 347–383. [Google Scholar] [CrossRef]
- Spykman, O.; Gabriel, A.; Ptacek, M.; Gandorfer, M. Farmers’ perspectives on field crop robots—Evidence from Bavaria, Germany. Comput. Electron. Agric. 2021, 186, 106176. [Google Scholar] [CrossRef]
- Diwakaran, S.; Kumar, M.D.V.; Mohanreddy, P.S.; Rishika, C.; Sreenivasulu, P.; Sivasubramanian, M. Design of an Autonomous Mower with Height Adjustable Cutting Motor. In Proceedings of the ICSPC 2023—4th International Conference on Signal Processing and Communication, Coimbatore, India, 23–24 March 2023; pp. 348–352. [Google Scholar] [CrossRef]
- Huang, X.; Yi, J.; Shen, T. Research on automatic lawn mower system based on differential GPS and IMU fusion. In Proceedings of the 2023 3rd Asia-Pacific Conference on Communications Technology and Computer Science (ACCTCS), Shenyang, China, 25–27 February 2023; pp. 426–432. [Google Scholar] [CrossRef]
- Gagliardi, L.; Sportelli, M.; Frasconi, C.; Pirchio, M.; Peruzzi, A.; Raffaelli, M.; Fontanelli, M. Evaluation of autonomous mowers weed control effect in globe artichoke field. Appl. Sci. 2021, 11, 1658. [Google Scholar] [CrossRef]
- Sportelli, M.; Luglio, S.M.; Caturegli, L.; Pirchio, M.; Magni, S.; Volterrani, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Gagliardi, L.; et al. Trampling Analysis of Autonomous Mowers: Implications on Garden Designs. AgriEngineering 2022, 4, 592–605. [Google Scholar] [CrossRef]
- Martelloni, L.; Fontanelli, M.; Pieri, S.; Frasconi, C.; Caturegli, L.; Gaetani, M.; Grossi, N.; Magni, S.; Pirchio, M.; Raffaelli, M.; et al. Assessment of the cutting performance of a robot mower using custom built software. Agronomy 2019, 9, 230. [Google Scholar] [CrossRef]
- Sportelli, M.; Fontanelli, M.; Pirchio, M.; Frasconi, C.; Raffaelli, M.; Caturegli, L.; Magni, S.; Volterrani, M.; Peruzzi, A. Robotic mowing of tall fescue at 90 mm cutting height: Random trajectories vs. systematic trajectories. Agronomy 2021, 11, 2567. [Google Scholar] [CrossRef]
- Qiang, X.; Jun, Q.; Yong-hong, H. Effects of different trampling intensities on three species of warm season turfgrass. Acta Prataculturae Sin. 2022, 31, 52–61. [Google Scholar] [CrossRef]
- Carrow, R.N.; Petrovic, A.M. Effects of traffic on turfgrass. In Turfgrass Agronomy Monograph 32; Waddington, D.V., Carrow, R.N., Shearman, R.C., Eds.; ASA, CSSA, and SSSA: Madison, WI, USA, 1992; pp. 285–330. [Google Scholar]
- Sportelli, M.; Martelloni, L.; Orlandi, A.; Pirchio, M.; Fontanelli, M.; Frasconi, C.; Raffaelli, M.; Peruzzi, A.; Consorti, S.B.; Vernieri, P. Autonomous mower management systems efficiency improvement: Analysis of greenspace features and planning suggestions. Agriculture 2019, 9, 115. [Google Scholar] [CrossRef]
- Pirchio, M.; Fontanelli, M.; Frasconi, C.; Martelloni, L.; Raffaelli, M.; Peruzzi, A.; Gaetani, M.; Magni, S.; Caturegli, L.; Volterrani, M.; et al. Autonomous Mower vs. Rotary Mower: Effects on turf quality and weed control in tall fescue lawn. Agronomy 2018, 8, 15. [Google Scholar] [CrossRef]
- Morris, K.N.; Shearman, R.C. NTEP Turfgrass Evaluation Guidelines. 2008. Available online: https://www.ntep.org/pdf/ratings.pdf (accessed on 26 June 2023).
- Caturegli, L.; Gaetani, M.; Volterrani, M.; Magni, S.; Minelli, A.; Baldi, A.; Brandani, G.; Mancini, M.; Lenzi, A.; Orlandini, S.; et al. Normalized Difference Vegetation Index versus Dark Green Colour Index to estimate nitrogen status on bermudagrass hybrid and tall fescue. Int. J. Remote Sens. 2020, 41, 455–470. [Google Scholar] [CrossRef]
- Bosse, M.; Nourani-Vatani, N.; Roberts, J. Coverage Algorithms for an Under-actuated Car-Like Vehicle in an Uncertain Environment. In Proceedings of the IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 698–703. [Google Scholar]
- Monteiro, J.A. Ecosystem services from turfgrass landscapes. Urban For. Urban Green. 2017, 26, 151–157. [Google Scholar] [CrossRef]
- Ignatieva, M.; Haase, D.; Dushkova, D.; Haase, A. Lawns in cities: From a globalised urban green space phenomenon to sustainable nature-based solutions. Land 2020, 9, 73. [Google Scholar] [CrossRef]
- Beard, J.B.; Green, R.L. The Role of Turfgrasses in Environmental Protection and Their Benefits to Humans. J. Environ. Qual. 1994, 23, 452–460. [Google Scholar] [CrossRef]
- MacLaren, C.; Swanepoel, P.; Bennett, J.; Wright, J.; Dehnen-Schmutz, K. Cover crop biomass production is more important than diversity for weed suppression. Crop Sci. 2019, 59, 733–748. [Google Scholar] [CrossRef]
- Grossi, N.; Volterrani, M.; Magni, S. Tall Fescue Turf Quality and Soccer Playing Characteristics as Affected by Mowing Height. In Proceedings of the International Conference on Turfgrass Management and Science for Sports Fields, Athens, Greece, 2–7 June 2003; pp. 319–322. [Google Scholar]
- Yousfi, S.; Marín, J.; Parra, L.; Lloret, J.; Mauri, P.V. Remote sensing devices as key methods in the advanced turfgrass phenotyping under different water regimes. Agric. Water Manag. 2022, 266, 107581. [Google Scholar] [CrossRef]
- Krans, J.V.; Beard, J.B. Effects of Clipping on Growth and Physiology of ‘Merion’ Kentucky Bluegrass. Crop Sci. 1985, 25, 17–20. [Google Scholar] [CrossRef]
- Pornaro, C.; Novello, A.; Fidanza, M.; Macolino, S. Grasscycling: A Key Practice for Sustainable Turfgrass Management. Grasses 2022, 1, 45–52. [Google Scholar] [CrossRef]
- Schiavon, M.; Pornaro, C.; Macolino, S. Clippings return decreases mineral nitrogen requirements for bermudagrass (Cynodon spp.) lawns in Mediterranean Europe. Crop Sci. 2021, 61, 2916–2925. [Google Scholar] [CrossRef]






Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).