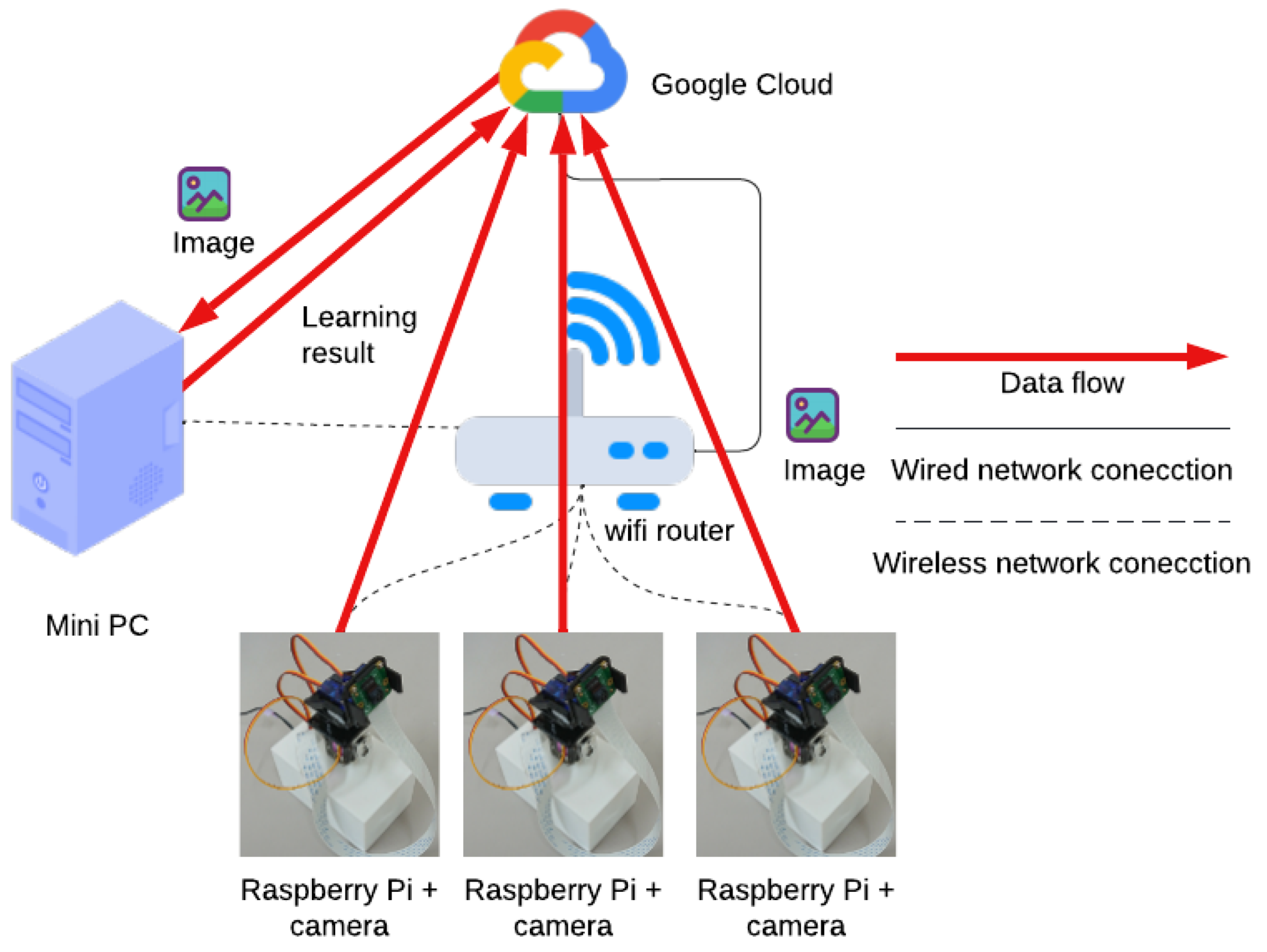
The network architecture and data flow of the system are shown in
Figure 2. First, each camera device is placed in the field. It takes an image of the area to be photographed and uploads the image to Google Drive. The PC downloads the images uploaded to Google Drive, performs image analysis, and outputs the measurement data. Finally, the measurement data are uploaded in CSV format to a specific shared folder on Google Drive, and the irrigation system can access the measurement data.
3.1. Camera Device
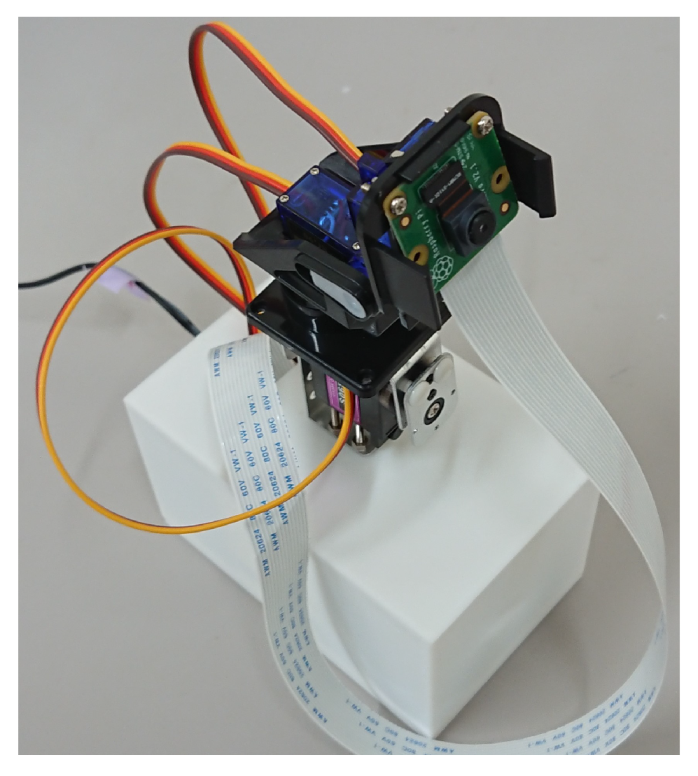
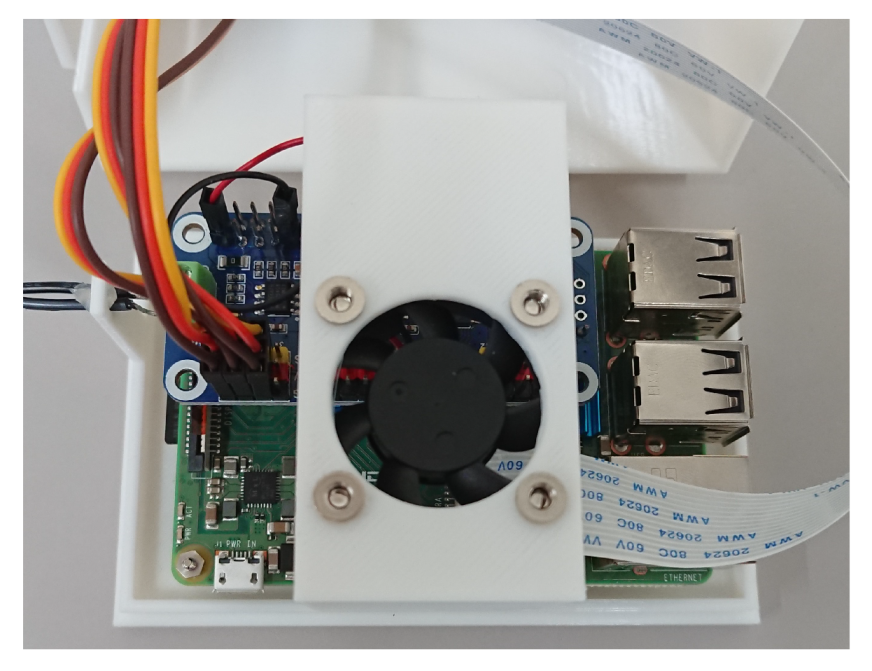
The exterior and interior of the camera device are shown in
Figure 3 and
Figure 4, respectively. The device is a small camera with a Raspberry Pi, a 3-axis pan-tilt camera mount, and can move the viewpoint. The Raspberry Pi, pulse-width modulation (PWM) servo driver board, and other components are housed in a 3D-printed case, and a 3-axis pan-tilt camera mount is attached to the top of the case. In order to prevent the Raspberry Pi from overheating during field use, it is necessary to use a case with a cooling fan to cover the Raspberry Pi. There were no cases with cooling fans on the market, so we used a 3D printer to make our own case, which consists of two parts: a base to hold the Raspberry Pi and a lid to cover it. The specifications of the camera device used are shown in
Table 1.
The servomotor and camera can be controlled using a Raspberry Pi. In addition, images can be uploaded to a shared file environment, such as Google Drive, by connecting to the Internet using a Wi-Fi environment in the field. A 3-axis pan-tilt camera mount using servomotors is created to enable a wide range of imaging with a single camera device. The servomotors are connected to Raspberry Pi via a PWM servo driver equipped with a PCA9685 controller; this controlled multiple servomotors by sending commands to the PWM servo driver via I2C communication to control their angle. For the camera, we used a dedicated camera module for Raspberry Pi. The camera has a resolution of 8 megapixels, which is sufficient for image analysis. In addition, the small size and weight of the board allows it to be moved by a low-torque motor when installed in the camera mount. The camera device can be connected to a network via Wi-Fi or wired cables, and the image data can be sent to a PC for image analysis via Google Drive.
Software Design
The camera device is programmed to run on a Raspberry Pi; specifically, on a Raspberry Pi OS using Python 3.7. The ‘crontab’ command is used to set the program to run at startup. This allows the system to run automatically when Raspberry Pi is turned on. The three functions of this program are: (1) change the viewing direction of the camera by controlling the servomotors, (2) capture images, and (3) upload the captured images to Google Drive. The shooting time to capture images is predetermined by the program, and images are captured at regular intervals during the day. The camera angle is changed slightly at each shooting time to capture images in all possible directions. All captured images are saved in a specific folder on Google Drive. To operate Google Drive using Python, we used the PyDrive module that manipulates the Google Drive application programming interface (API).
3.2. Image Analysis System
In the system shown in
Figure 2, an image analysis program runs on a PC. The execution environment is Windows 10 and the language used is Python 3.7. To run this program regularly, we need to set it to run automatically at midnight every day using the Windows task scheduler. The system downloads all images taken by the camera device on the previous day from Google Drive at 00:00 every day, executes the image analysis program, converts the output measurement data into a CSV file, and uploads it to the folder where the measurement data is stored in Google Drive. The steps of the process from downloading the images to uploading the measurement data are described in the list below.
Download images from Google Drive.
Correct image distortion.
Detect stem, target part of stem diameter measurement (target stem), and growing point (seichouten in Japanese) using YOLO.
Determine the same plant from the label of each detected part.
Detect circles by Hough transform of reference balls.
Extract the contour part of the stem by segmentation of the ‘target stem’ part of the image.
Measure the thickness of the stem in pixels.
Convert pixels to actual stem diameter length using neighboring reference balls.
Measure the distance between the ‘target stem’ and the growing point using a reference ball.
Summarize measurement data and convert them to CSV format.
Upload the CSV file to Google Drive.
Google Drive file download upload operations use PyDrive as well as a camera device.
3.2.1. Image Distortion Correction
Image distortion correction by camera calibration is done using the OpenCV image processing library. OpenCV includes functions for calculating the parameters required for calibration using a chessboard and for calibrating the image with those parameters. Using the former function, we estimate the parameters from the images taken by the camera module of Raspberry Pi. The system’s program uses these parameters to calibrate all images.
3.2.2. Object Detection with YOLO
Transfer learning is performed using YOLOv5 to detect tomato plant units. We trained on a pre-trained model using the Coco 2017 dataset (apple detection) [
11]. Approximately 1100 images of tomatoes taken in the field were used for training. The object detection targets were stems, ‘target stem’, and growing point, and each part was labeled by surrounding the training image with a rectangle, as shown in
Table 2. The images labeled using these criteria are shown in
Figure 5. The training on YOLOv5 was performed with a batch size of 12 and an epoch count of 140 using Mosaic data augmentation and SGD. The trained model used for training was YOLOv5x. Hyperparameters are defaults unless otherwise noted.
YOLO [
12] is widely used for real-time object detection such as face recognition and multi-target tracking. Since its release in 2016, YOLO has been updated several times, with the latest version being YOLOv5, which has improved accuracy and performance [
13]. The benefits of YOLO are widely applied to the object detection domain, and its performance has been optimized. It is also possible to perform object detection on Raspberry Pi. In addition, YOLO models have been pre-trained on various datasets, allowing for transfer learning of datasets. Hence, YOLO has been optimized for object recognition and highly evaluated for its accuracy and performance. We considered deep learning segmentation of the entire image, but found that generating a dataset for this purpose was challenging and required significant time and resources. Therefore, we decided to use YOLOv5, a bounding box-based object detection method that is easier to create datasets. YOLO has also been used for plant detection [
8,
9] and is suitable for this system.
3.2.3. Identification of Same Strain from Each Detected Label
The next step is to determine the same strain based on the labels of each detected region. This step alternates between the following two processes: the first one is to determine if the labels are for the same plant from images taken at different times, and the second one is to determine whether the labels ‘stem’, ‘target stem’, and ‘seichouten’ are for the same plant from a single image. These processes are necessary because the labels of multiple strains can be detected in a single image. The first process is to determine the degree of overlap of labels of the same type for each label detected in images taken at different times and at the same shooting angle and to determine whether the labels are of the same plant if they are above a certain threshold value. If the overlap is greater than the threshold value, the labels are considered to be from the same plant. This is based on the fact that the position of labels does not change significantly even if the plant is growing, unless the shooting time to capture images is far apart. In this process, if the attracting string is pulled down, the position of the plant is shifted significantly, and the same plant cannot be tracked. The second process is to determine the overlap between ‘stems’ and ‘target stem’, and between the ‘stem’ and ‘seichouten’ labels; if there is even a small overlap, it is determined to be the same plant. If there are multiple flower clusters in the bloom, multiple ‘target stems’ are detected for a single stem. In this case, the label added above is given priority in the image analysis. In addition, multiple ‘seichouten’ may be detected for a single stem when the side shoots are not processed and extended. However, if the side shoots are not processed for a long time, they often grow higher than the main stem; in this case, accurate measurement is not possible.
3.2.4. Reference Ball Detection
Next, we estimate the diameter of the reference ball in the image by detecting the circle using Hough transform. First, the pink pixels in the image are extracted by setting a threshold value, and a binary image is generated. The image is then smoothed to remove noise and circle detection is performed using the function of OpenCV. The Hough transform can detect circles even if leaves hide a part of the circle. However, false positives are likely to occur. Therefore, to determine whether the detected circle is valid, we checked the number of pink pixels included in the circle and eliminated them if they were below the threshold. OpenCV’s image calibration process can correct the distortion of a flat surface in 3D space, but a sphere such as a ping pong ball will be distorted into an ellipse as it moves away from the center of the image. Therefore, the reference ball may not be accurately detected by circle detection using Hough transform. Therefore, by using contour extraction and ellipse fitting functions of OpenCV, we can detect the elliptical reference sphere. The detected circles and ellipses are circled in green in
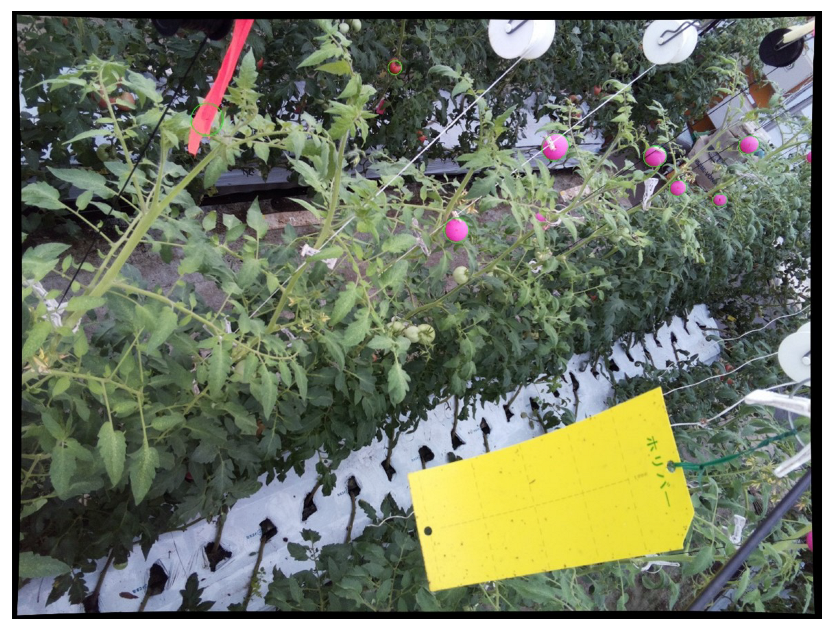
Figure 6. In this experiment, a pink reference ball was used; nevertheless, red tomatoes and red markers hanging above the field were detected incorrectly.
3.2.5. Stem Contour Detection Using Segmentation
The next step is to extract the contour of the stem using DeepLabv3+, a deep learning segmentation. DeepLabv3+ is an extension of the existing DeepLabv3 called semantic segmentation which labels all pixels in an image [
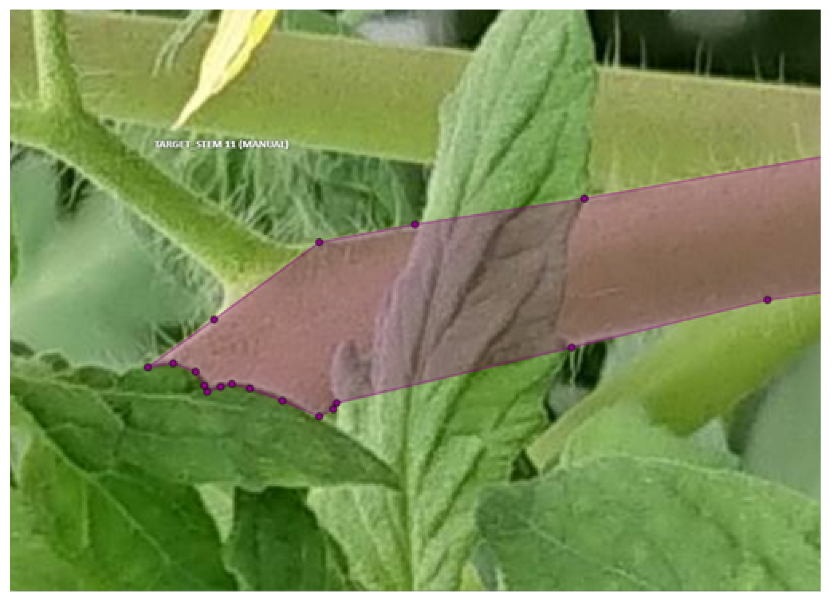
14]. It performs better than traditional methods such as U-Net, achieving 89% performance on the test set. We created the training data for this process. An example of an image with training data in a polygon format is shown in
Figure 7. The training of DeepLabv3+ was performed with a batch size of 10 and an epoch count of 200 using Adam. No data augmentation was performed. The learning rate was set to 1
initially and changed to 1
after 120 epochs.
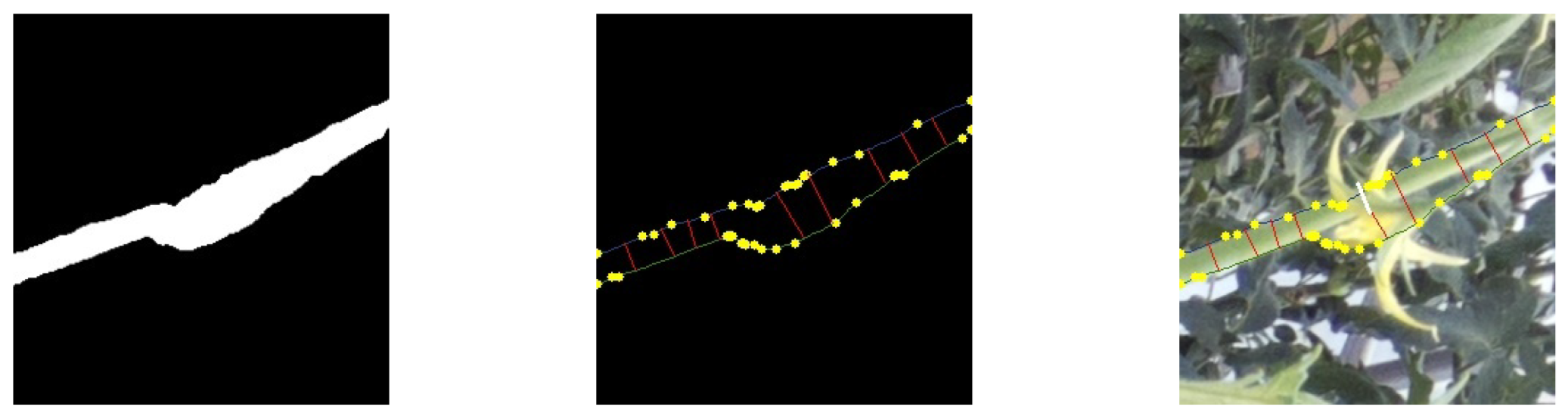
The extraction results of segmentation using DeepLabv3+ are shown in
Figure 8. The black areas in the right image are the extracted stems.
Due to the complexity of measuring stem diameter from stem images obtained by YOLOv5 using traditional image processing techniques, we chose to utilize deep learning-based segmentation for obtaining stem contours. After testing and evaluating various models, we found that DeepLabv3+ offered superior detection performance in comparison to alternatives such as R-CNN and was both lightweight and suitable for our system.
3.2.6. Measurement of Stem Diameter in Pixels
We proposed a novel method for measuring stem diameter. It involves measuring the distance between a line segment on one side edge of the stem and a line segment on the opposite side edge. We use line-to-line distance measurement instead of point-to-point distance measurement. This increases accuracy and reduces the number of inaccurate results. The process aims to obtain a set of pairs of opposite sides suitable for stem diameter measurement. The process for measuring stem diameter in pixels is outlined in the following steps:
Apply a Gaussian filter to the binary image to suppress noise, then detect stem contours using a Laplacian filter.
Find the contours of the stem as a continuous line connected in eight neighborhoods and list them in pixels.
Divide the contour into two parts on both sides of the stem.
Extract feature points using two methods to vectorize the contour.
Vectorize feature points as endpoints and obtain contour segments of a certain length or longer as line segments.
Calculate the stem diameters by corresponding the stem contour segments with the stem contour segments on the opposite side.
Cluster the stem diameters of the corresponding contour segments.
Take a weighted average and calculate the stem diameter with the length of the overlap for each cluster.
Calculate the correctness score of the stem diameter for each cluster, and the stem diameter of the cluster with the highest score is the measured stem diameter.
In step 3, if a single contour is obtained, the contour is divided by the point farthest from the starting point of the list. Additionally, in the case of obtaining two or more contours, the longest two are obtained in terms of length (number of pixels), and the ratio of the length is taken from the one with the larger ratio to the other one when the ratio is greater than 0.7. This is because the lengths of both sides of the stem are generally similar values, and if the ratio is greatly different, there is a possibility of measuring the wrong location and it is necessary to eliminate it.
In step 4, feature points are placed at points of high curvature. Specifically, the entire stem contour is scanned, and feature points are assigned when the angle between the midpoint of the interval and the endpoints of the interval is less than a certain angle in a certain short interval. Feature points of the other type are placed at points that divide loose curves longer than a certain length. Specifically, the entire stem contour is scanned, and when the average distance between a point between two points and the line connecting the two points exceeds a certain distance, the point farthest from the line is assigned as the feature point. Together with operation in step 5, the former feature point is used to extract the appropriate stem contour by excluding parts that do not look like the stem contour. The latter feature point is intended to improve the accuracy of stem diameter measurement in the presence of loose curves.
In step 5, contour segments of greater than a certain length are vectorized by projecting the endpoints on the line with the smallest sum of the squared distances.
In step 6, a distance between the line segments is calculated by a unique method and used as the stem diameter. Two segments of the stem contour are taken from each side and normalized to obtain two direction vectors. From the two direction vectors, we calculate the mean vector and the vector orthogonal to it. The segments of the stem contour are projected onto the mean vector, and when there is overlap and the angle formed by the two original vectors is less than a certain angle (the segments of the two contours are almost parallel), it is considered that the segments of the stem contour correspond to each other. One segment of the stem contour is taken from each side and normalized to obtain two direction vectors and their mean vector. If the two stem contour segments overlap when projected onto the mean vector and the angle formed by the two original vectors is smaller than a certain angle (the two contour segments are nearly parallel), the stem contour segments are considered to correspond to each other. A straight line passes through the center of the region where the two projected contour segments overlap and, perpendicular to the mean vector, intersects the two stem contour segments, which have two intersections each.
The distance between the two intersecting points is calculated as the stem diameter of the corresponding two contour segments.
In step 7, we cluster the obtained multiple stem diameters by using the fact that the stem diameter does not change significantly (within ± about 17%). This separates clusters of correct stem diameter and incorrect stem diameter.
In step 8, the weighted average of the stem diameter is taken for each cluster, with the length of the overlap when projected as a weight.
In step 9, correct stem contours have longer overlaps and are often calculated shorter than in the case of errors. The stem diameter correctness score is calculated as (overlap length)/(stem contour length), and the stem diameter of the cluster with the highest score is considered the measured stem diameter.
The process for extracting the stem diameter is shown in
Figure 9.
3.2.7. Calculation of Measurement with Reference Ball
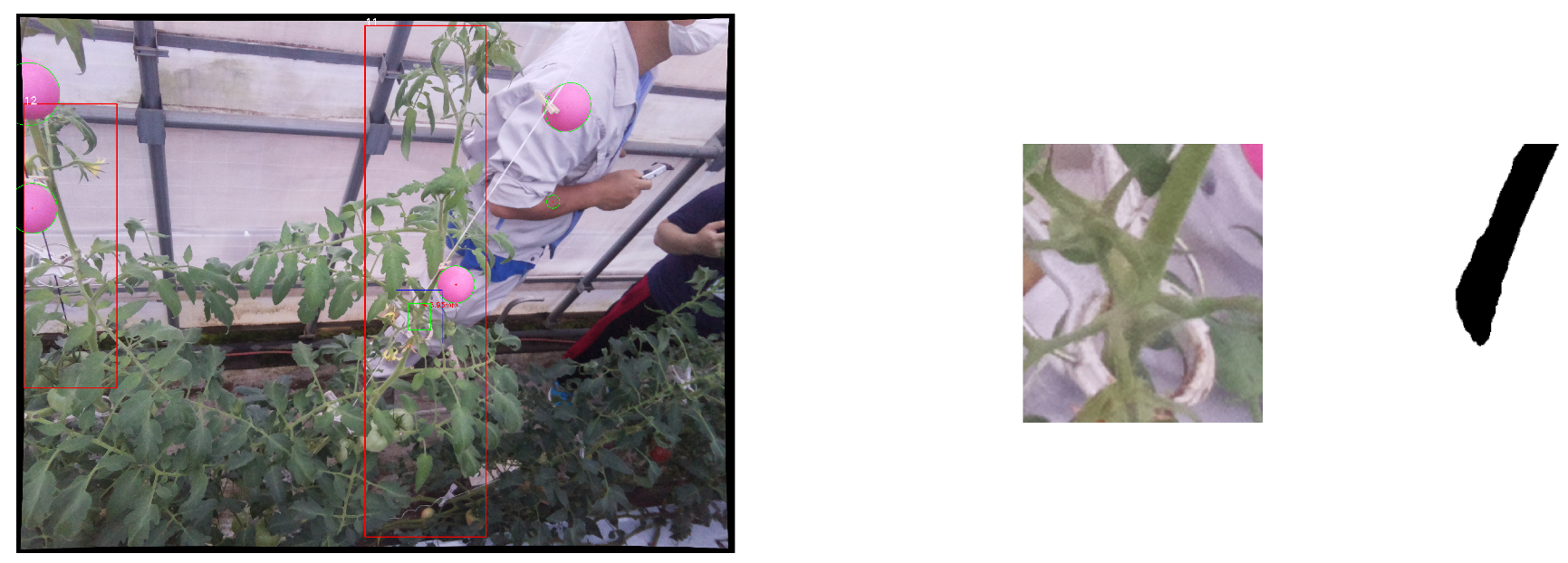
The next step is to calculate the stem diameter and length from the base of the flower cluster to the growing point from nearby reference balls. We use the reference ball with the closest Euclidean distance on the image from the labels ‘target stem’ and ‘seichouten’.
To calculate the actual stem diameter
mm from the stem diameter
px on the image and the diameter of the reference ball
px, we use Formula (
1).
mm is the diameter of the reference ball, which is 40 mm in our experiment. The
is the value calculated by the experiment, which is 1.2 in our system.
To find the distance between the vegetative part and stem at the base of the flower cluster, we first calculate the Euclidean distance
px between the ‘target stem’ and ‘seichouten’ in the image. Then, we calculate the angle
between the ‘target stem’, camera, and ‘seichouten’ in 3D coordinates from the image using Formula (
2), where
W is the number of pixels in the width of the captured image and
is the angle of view of the camera.
Then, using the reference ball, we calculate the distance
l mm between the camera and target using Formula (
3).
From Equation (
3), we calculate distances
and
from the camera using the reference balls corresponding to ‘target stem’ and ‘seichouten’. Finally, we calculate the distance between the growing point and stem at the base of the flower cluster,
mm, using the cosine theorem and Equation (
4).
From these equations, the stem diameter and distance between the vegetative part and stem at the base of the flowering cluster can be calculated from the image.
3.2.8. Conversion of Measurement Data to CSV Format
Finally, the calculated stem diameters and distances between the vegetative part and stem at the base of the flower cluster are summarized in the CSV format. In this process, four pieces of information are included: the time of shooting, the ID assigned to the plant, the stem diameter, and the distance between the vegetative part and the base of the flower cluster. The ID assigned to a plant is the number assigned to the stem when determining the identity of the plant, and the same ID is assigned to plants that are determined to be the same in images taken at different locations, times, and angles.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}