1. Introduction
With the development of productivity and the growing awareness of resource use and environmental protection, research on closed-loop supply chains has attracted more and more attention [
1,
2,
3,
4]. In recent years, research on manufacturing and remanufacturing systems has attracted extensive attention. Industry practice shows that remanufacturing in closed-loop supply chains not only helps to reduce resource consumption but also helps to save costs and improve competitive advantages [
5]. Because remanufacturing is profitable and environmentally efficient, many enterprises have established their own recycling and remanufacturing systems and voluntarily carried out remanufacturing activities, such as IBM, HP, BMW, Ford, Apple, Kodak, Xerox, Caterpillar, etc. [
6,
7]. Therefore, consideration of the remanufacturing link in closed-loop supply chain systems [
8,
9] is being paid more attention. Ref. [
10] considers the supply chain model with a product remanufacturing link, Ref. [
11] investigates the problem of effective channel design for closed-loop supply chain systems, and Ref. [
12] determines productivity, remanufacturing rates, and disposal rates through a cost optimization approach. Ref. [
13] applied the Pontryagin maximum value principle [
14] and studied a linear model for optimizing production, remanufacturing, and abandonment strategies. In addition, a number of scholars have started to focus on closed-loop supply chain production–inventory control systems: Ref. [
15] used optimal control ideas to study the dynamic capacity planning problem of closed-loop supply chain remanufacturing systems; Ref. [
16] applied the ideas of game theory to the network equilibrium problem of closed-loop supply chain systems; and Ref. [
17,
18] applied fuzzy logic ideas to study the product recovery strategy of closed-loop supply chains.
It is worth noting that the above-mentioned literature mainly focuses on the static environment, while it is obvious that the static model is not sufficient to portray the dynamic characteristics of closed-loop supply chain systems such as demand fluctuation, production lead time, sales forecast, etc. Therefore, supply chain analysis based on a dynamic model has achieved some results [
19,
20,
21,
22], among which, modeling the closed-loop supply chain as a kind of dynamic behavior of switching system has attracted great attention from many scholars [
23,
24], and it is generally believed that a switching system with Markov jump parameters is an appropriate model to describe the closed-loop supply chain system. The robust production and maintenance scheduling problem is described in [
19] as a minimax statistical control problem. The machine state process is modeled as a finite-state Markov chain whose generator depends on the rate of aging, productivity, and maintenance, modeling the demand rate as an unknown interference process. Ref. [
25] studies the control problem of a closed-loop supply chain switching system with Markov jump parameters. Aiming at the uncertainty problem in the process of remanufacturing, based on the input lag control strategy, the Markov switching idea is applied to the controller design and performance analysis of the system. However, modeling the production–inventory model of a closed-loop supply chain system as a switching system with Markov jump parameters has rarely been reported [
26], which is one of the main motivations for this study.
The bullwhip effect is the phenomenon of demand fluctuation amplification in supply chain and is the most important performance indicator in supply chain operations [
27,
28,
29]. The bullwhip effect exists in a supply chain and more extensive ERP, e-commerce, and other management systems, including modern logistics operation. It has important theoretical significance and wide application prospect to study bullwhip effect of a closed-loop supply chain system with a robust
control method.
This paper studies the closed-loop supply chain production–inventory system of remanufacturing. Considering the inventory decay factor, the corresponding subsystems are determined according to the different inventory status, and the switching system with Markov jump parameters is established. Meanwhile, the
control method [
30] in robust control is applied. In the form of LMI, sufficient conditions are given to ensure the stability of the system and have
performance in suppressing the bullwhip effect. Finally, a numerical example of scrap recycling in a domestic iron and steel enterprise is used to illustrate the validity of the results obtained.
2. Closed-Loop Supply Chain Switching System Modeling
This paper considers the control problem of a closed-loop supply chain system based on remanufacturing. The model assumes that a manufacturer produces a product, and at the same time, the manufacturer retrieves that product from the market for remanufacturing. This paper assumes that the quality standard of the remanufactured goods can meet the standard of the new products. This paper mainly considers the problem of inventory management. Manufactured and remanufactured goods are stored in the usable goods warehouse, and used goods recovered from the market are stored in the recycled goods warehouse. and represent the inventory levels of the available commodity warehouse and the recycled commodity warehouse and are the state vector of the system. and represent the manufacturing rate of the manufacturing equipment and the recycling rate of the used goods at the moment, respectively. For the system model, we have the following assumptions.
Assumption A1. Assume that all products are recyclable and that the manufacturer is the only determinant of the amount of product to be recycled, i.e., that there are sufficient products on the market to meet the demand for recycling and that the manufacturer only needs to recycle the amount of product it needs.
Assumption A2. The market demand is the sum of the constant and the perturbation , i.e., Note 1. For the sake of generality, it is assumed that the perturbations follow a normal distribution or are sinusoidal functions.
Assumption A3. Recycled products are disposed of in two ways, remanufacturing and disposal, so that α represents the remanufacturing rate, β the disposal rate, and α and β are uncertain parameters; is assumed in this paper.
Assumption A4. The value of the products in the warehouse decreases over time. and represent the decay rates of the available and recovered warehouses, respectively.
The closed-loop supply chain system considered in this paper have inventory levels as the state variable.
First, for the available commodity warehouse, when
, the system is given by the following equation
where
is the maximum capacity of the available warehouse.
It should be noted that when
indicates that there are no items in the warehouse that can be used to meet the order demand, which also results in a stock-out phenomenon. At this point, the production–inventory model can be described as
Similarly, for the recycled goods inventory, let
be the maximum capacity of the recycled goods warehouse; when
, the system can be represented as
When
is used, the system can be described as
Let
be the operating cost of the system, then
where
,
, the parameters are as follows:
is the cost of useful inventory,
is the cost of remanufactured inventory,
is the cost of remanufactured product, and
is the cost of discard (all deterministic parameters).
Note 2. The total closed-loop supply chain cost is determined by the cost of useful inventory, the cost of remanufactured inventory, the cost of remanufactured products, and the cost of waste disposal.
In order to establish a closed-loop supply chain production–inventory switching system model, let
; considering Equations (1) and (3), the following closed-loop supply chain model can be obtained:
where
, ,
, ,
Considering Equations (1) and (4), the supply chain model of the closed-loop system is as follows:
where
Similarly, combining Equation (
2) with Equation (
3), the following closed-loop supply chain system can be obtained:
where
Finally, considering Equations (2) and (4), the following closed-loop supply chain system is obtained:
where
Suppose that the switch between the 4 subsystems is determined by the Markov process
and that the transfer probabilities of
,
satisfy
and meet
,
.
The closed-loop supply chain system can be rewritten as a switching control system as follows:
where
,
are uncertain matrices. Suppose it satisfies
, where
is unknown matrices, and satisfies
,
,
, and
are known matrices. In the following,
,
is treated in that form, when
,
, where
When
,
, where
, where
Note 3. The bullwhip effect is the most significant performance indicator of a closed-loop supply chain analysis, which generates production control and recovery remanufacturing control through inventory levels
, suppressing the perturbations of uncertain system demand
, thereby minimizing the system operating costs
, and this level of suppression can be described by the following equation:
The smaller the
, the better the performance of the system, and it is easy to see that Equation (
13) is precisely the condition for the level of disturbance suppression in the
control to satisfy the gain of
. In essence, the study of the suppression of the bullwhip effect in supply chain systems can be incorporated into the framework of the study of
control.
Note 4. This paper uses the idea of robust control to study the control problem of for switching systems with Markov jump parameters. Assumption (12) is a common assumption condition in robust control.
In a closed-loop supply chain system, the following state feedback control law is designed.
The closed-loop supply chain switching system can be described as follows:
The initial conditions of system (15) are given as follows:
The objective of this paper is described as follows: to establish a switching system for a closed-loop supply chain with Markov jump parameters, on this basis, design a robust controller to make the closed-loop supply chain system with remanufacturing and abandonment stable under the condition of satisfying performance.
3. Stability Analysis and Controller Design
In this section, we give sufficient conditions for the mean square exponential stability of closed-loop supply chain systems with Markov jump parameters and give the design method of the state feedback control law.
The following lemma is used in this paper.
Lemma 1 ([
26]).
Given matrices of appropriate dimensions , H, E, for all matrices F satisfying , such that, the following inequality holds:Then, there exists the scalar , such that the following inequality holds: Lemma 2 ([
31]).
(Suhur’s Complementary Lemma) For a given symmetric matrix , where is dimensional, the following three conditions are equivalent- (1)
.
- (2)
, .
- (3)
, .
In the following, we consider the following nominal system, i.e., the stability and robust
control of the system in the case of
,
, with the nominal system modeled as
We begin by introducing the following two definitions:
Definition 1 ([
32]).
For any initial condition , if there exist constants α and λ such that
holds, the system (15) is said to be mean square exponentially stable. Definition 2 ([
32]).
For any disturbance initial condition level , the system (15) is called mean square exponentially stable and has a dry disturbance suppression level γ if the system mean square index is stable and satisfies the constant , where . The main results are given below.
Theorem 1. The closed-loop supply chain system (17) with Markov jump parameters and state transition probability matrix satisfying condition (10) is exponentially stable with mean square and interference suppression level γ if, for a given positive constant λ, there exists a set of symmetric positive definite matrices ,, such that the following optimization problem can be solved:where . Proof. We first consider the system at
. Additionally, by Schur’s complementary lemma, if Equation (
18) holds, then
Construct the following Lyapunov functional:
For ease of writing, the matrix
in the modal
is denoted by
, and the rest of the matrices are denoted similarly.
,
.
Considering the Markov property, a calculation based on conditional expectations readily yields
We therefore have
where
denotes the smallest eigenvalue of
when
,
. For any
, there is
and then by
It is possible to obtain
Therefore, the system (17) mean square index is stable when
. □
The following shows that the system satisfies
, when
, under zero initial conditions. Define the following performance metrics.
From the zero initial condition,
,
, then
where
From the theorem, if Equation (
18) holds, then
.
Note 5. The condition in Theorem 1 is not linear matrix inequality, because it contains the coupling term of the product of the controller gain matrix
and the Lyapunov functional matrix. Therefore, Theorem 1 is just the result of the mean square stability of the system in theory and has no practical operational significance. The gain matrix
of the controller can be obtained only by converting Equation (
18) into linear matrix inequalities through appropriate matrix transformation.
Theorem 2. The closed-loop supply chain system (17) with Markov jump parameter and state transition probability matrix satisfying condition (10) is mean square exponential stable and has disturbance suppression level γ. If for a given positive constant λ, there exists a set of symmetric positive definite matrices , , , such that the following optimization problem can be solved, and if the following problem is feasible, the state feedback controller : Proof. Let
then
It is clear that
By Schur’s complementary lemma, the above equation is equivalent to
The above equation is multiplied by
and its transpose,
, on the left and right sides, respectively, to obtain Equation (
19). □
In the following, we consider the uncertainty of the system due to the recycling remanufacturing rate and give sufficient conditions for the closed-loop supply chain system (15) to be exponentially stable in mean square and have a disturbance rejection level of based on the idea of handling uncertainty in robust control thinking.
Theorem 3. The closed-loop supply chain system (15) with Markov jump parameter and state transition probability matrix satisfying condition (10) is exponentially stable with mean square and interference suppression level γ. If for a given positive constant λ, there is a set of symmetric positive definite matrix , , and parameter , , which makes the following optimization problem solvable, and if the following problem is feasible, the state feedback controller .where Proof. It follows from Theorem 2 that a sufficient condition for a closed-loop supply chain system (15) to be mean square exponentially stable and have a disturbance suppression level
is that the following inequality holds:
Since
, Equation (
23) can be rewritten as
By Lemma 1, if Equation (
24) holds, then the following equation holds:
From Schur’s complementary lemma, it follows that
Since the uncertainty matrix still exists in the above equation, we continue to apply Lemma 1 to deal with the uncertainty matrix present in the inequality. Since
, Equation (
26) is rewritten as
From Lemma 1, Equation (
27) holds; then, the following equation holds:
The content of the theorem is obtained from Schur’s complementary lemma. □
5. Simulation Examples
Considering the scrap recycling data of a domestic steel mill [
33], the following model parameters are set according to the actual situation and the historical data of the enterprise: the decay rate of the available commodity warehouse and the recycled commodity warehouse are
,
, and the cost parameter matrix
,
,
, and the initial values are set to
,
, (unit
tons).
satisfies Assumption 2. The remanufacturing rate
and the obsolescence rate
are considered as uncertain parameters and satisfy Assumption 3.
The system parameters are as follows:
State Transfer Matrix
Take another
From the Matlab toolbox, the state feedback controller is obtained as follows:
In the following, we consider the robust
control problem for a system with both external demand uncertainty and remanufacturing process uncertainty. Assuming that the external demand uncertainty
is a sinusoidal disturbance,
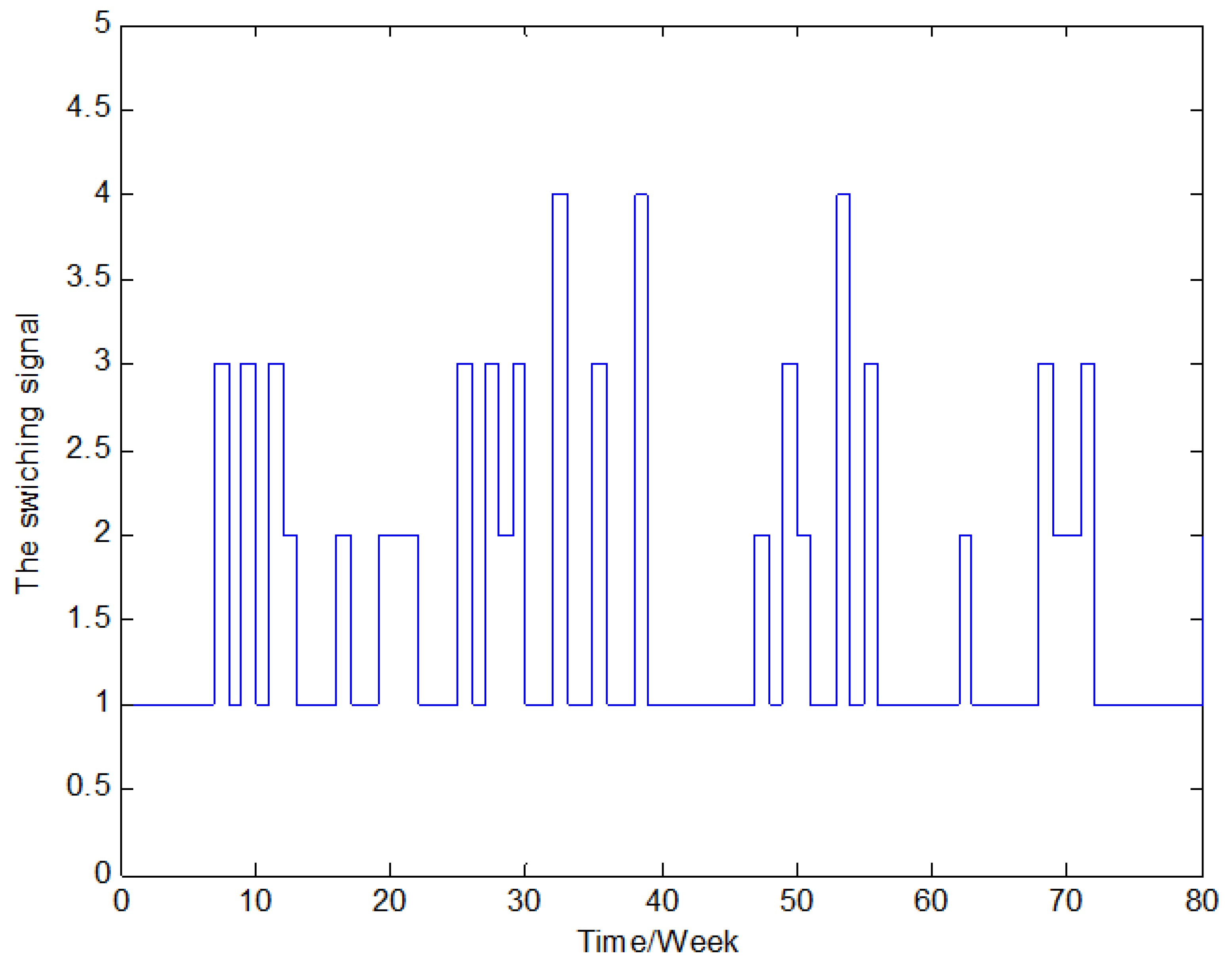
Figure 1 represents the switching signal of a supply chain switching system with Markov jump parameters.
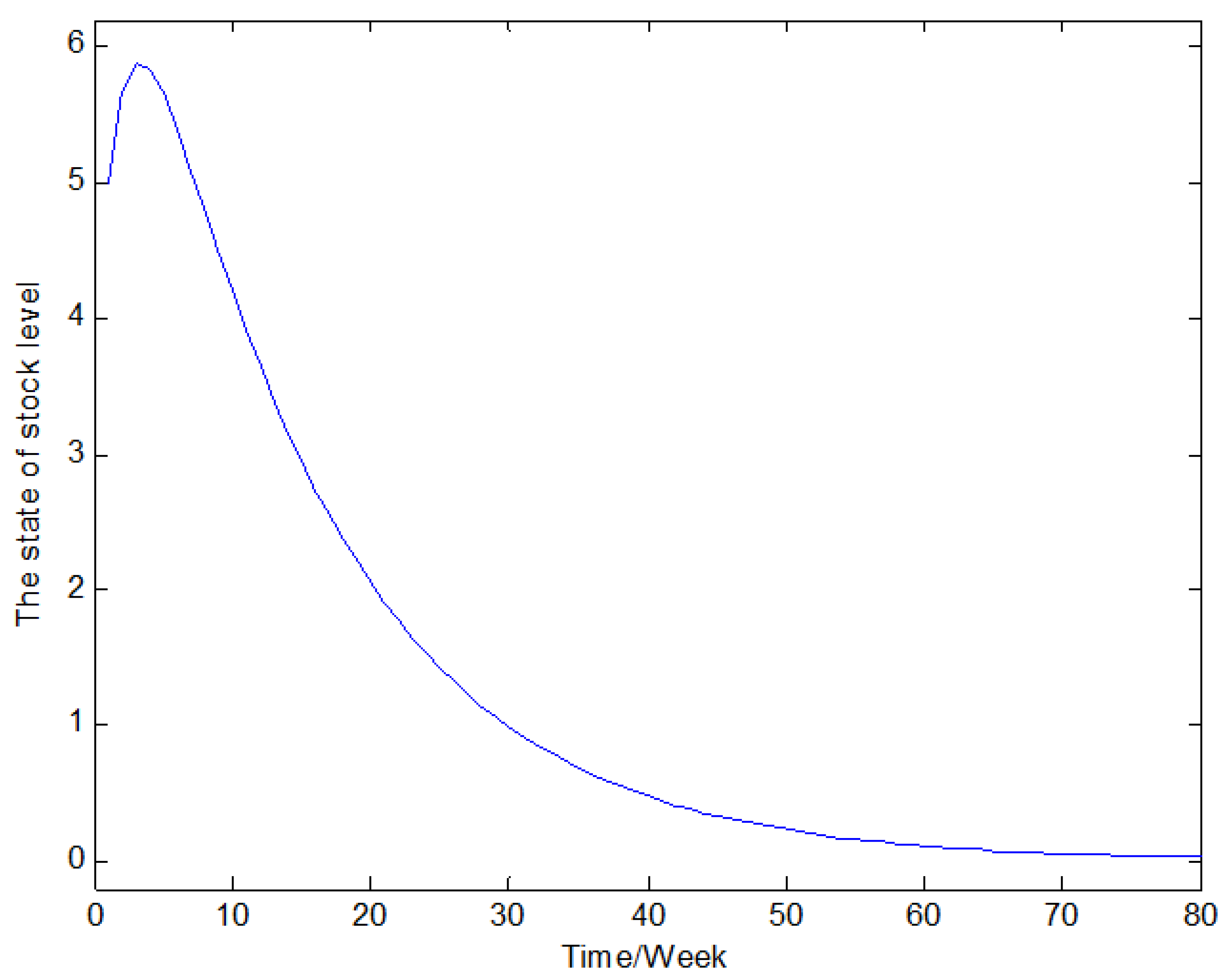
Figure 2 shows the change in stock levels of available commodity warehouses in the presence of external disturbances to the system in the form of sinusoidal disturbances and in the presence of recovery and remanufacturing uncertainty.
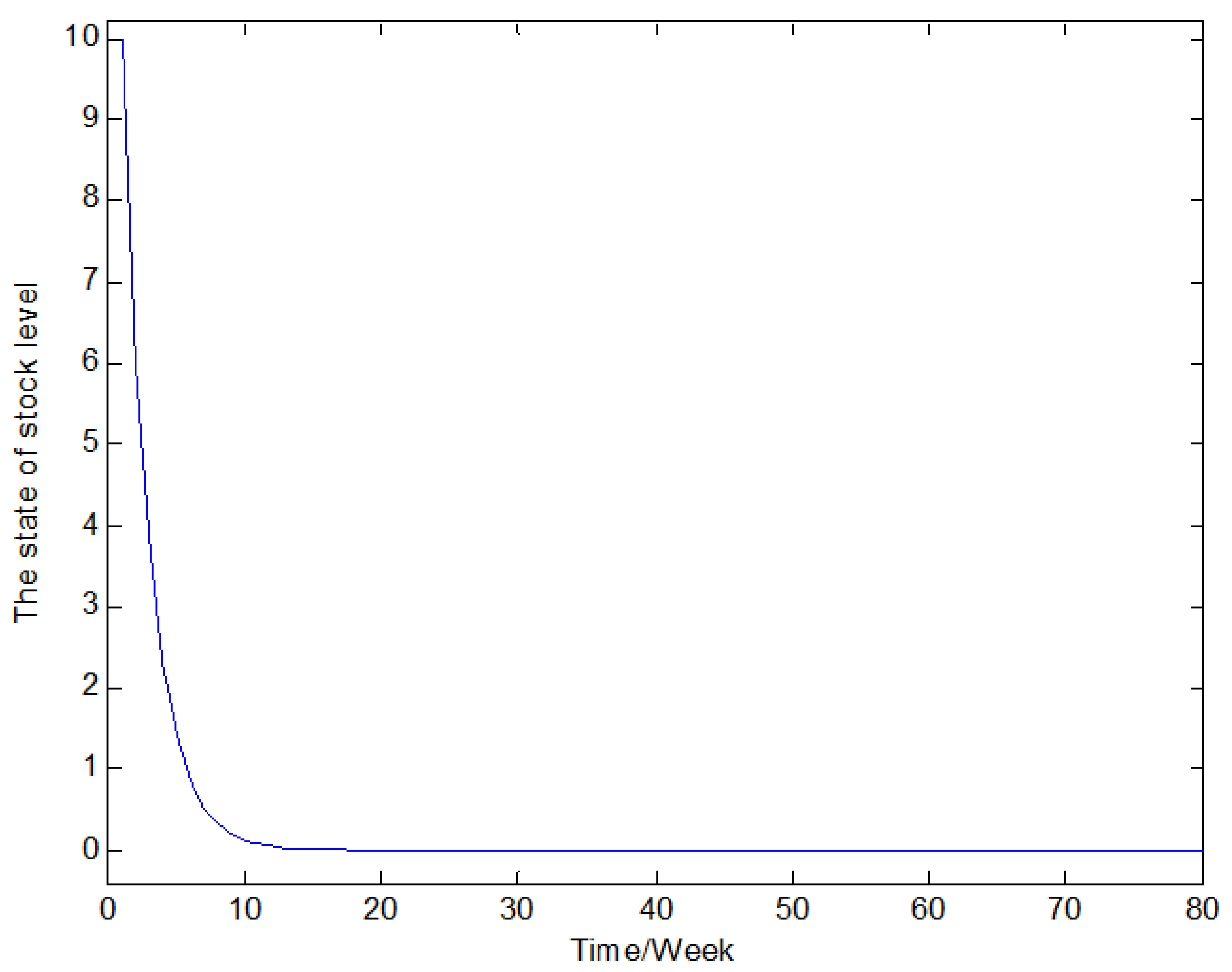
Figure 3 shows the change in stock levels in the recycled goods warehouse in the presence of external disturbances in the form of sinusoidal disturbances in the system and in the presence of uncertainty in recycling and remanufacturing.
From the simulation results, it can be seen that the robust controller designed in this paper can effectively suppress the uncertain demand disturbance in the recycling and remanufacturing process for the closed-loop supply chain system with Markov jump parameters.


{kind=link}
{kind=link}
{kind=link}


