


A Comparison of Signal Analysis Techniques for the Diagnostics of the IMS Rolling Element Bearing Dataset



Abstract
1. Introduction
- A practical comparison of the efficacy of various signal-based condition monitoring techniques, from the most elementary and general-purpose statistical parameters to complex cyclostationary methods, touching all the three phases involved in predictive maintenance, included signal pre-treatment strategies;
- A detailed study of IMS bearing dataset 1 that echoes the results of prolific research works on the theme, but proves to be innovative for the ample number of techniques applied successfully, highlighting fault signatures with remarkable clarity, without resorting to data-driven techniques;
- A concrete proof of the validity of two of the most fruitful tools used for the study, which are Cepstrum Pre-Whitening (CPW) and the cyclostationary technique of the Improved Envelope Spectrum (IES), never applied before for the analysis of IMS dataset 1, to the best of the Authors’ knowledge.
2. IMS Bearing Dataset and Signal Analysis Techniques
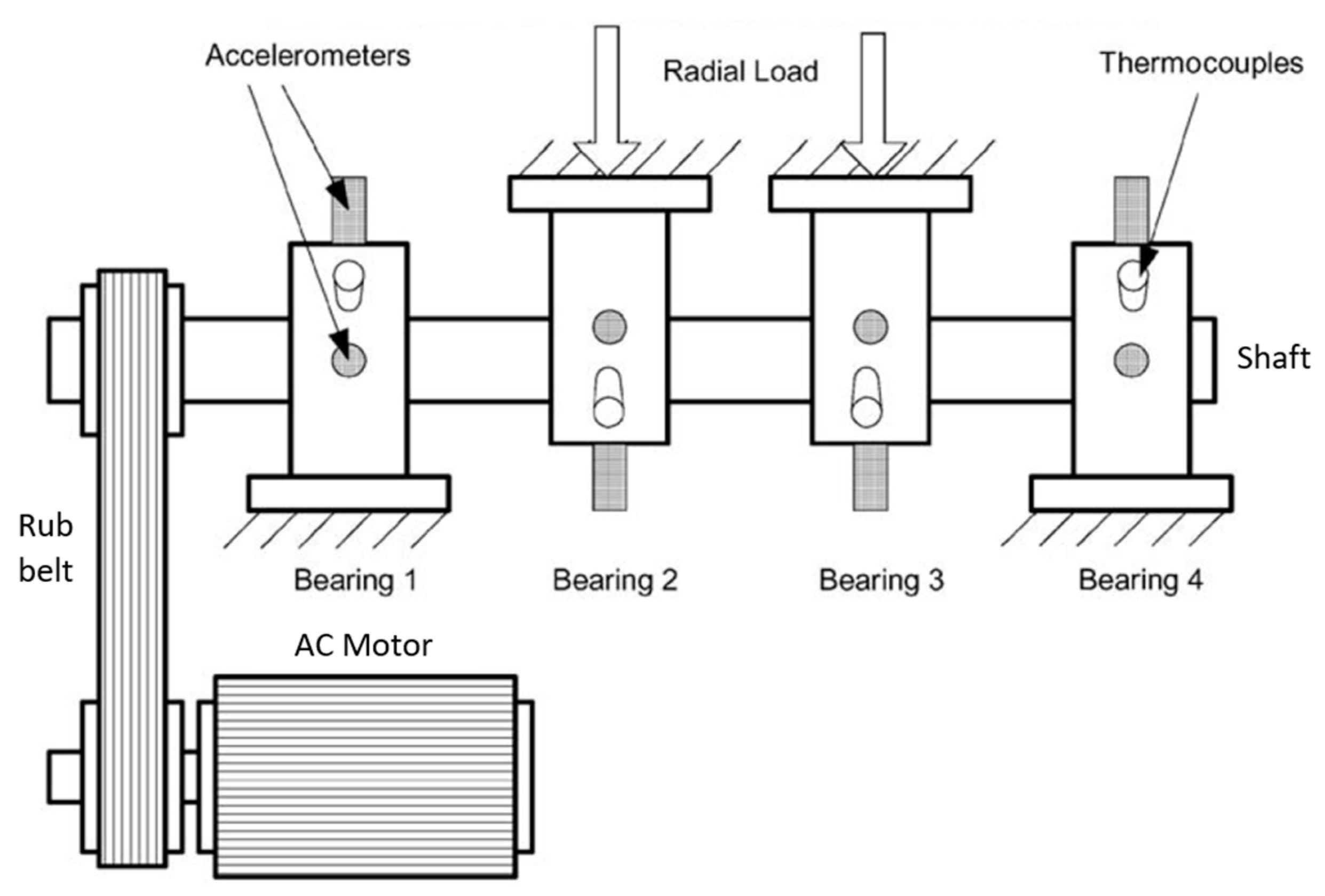
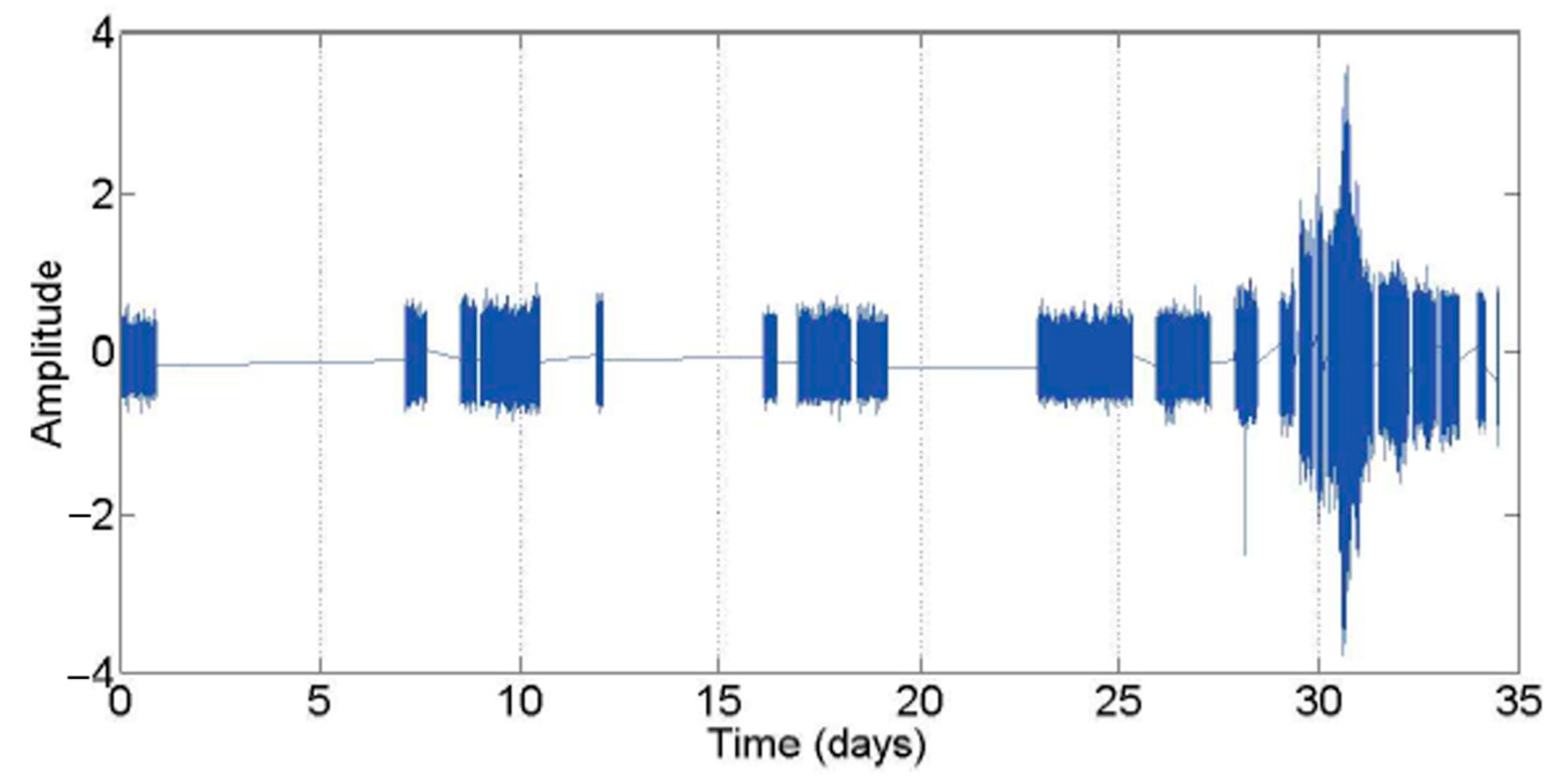
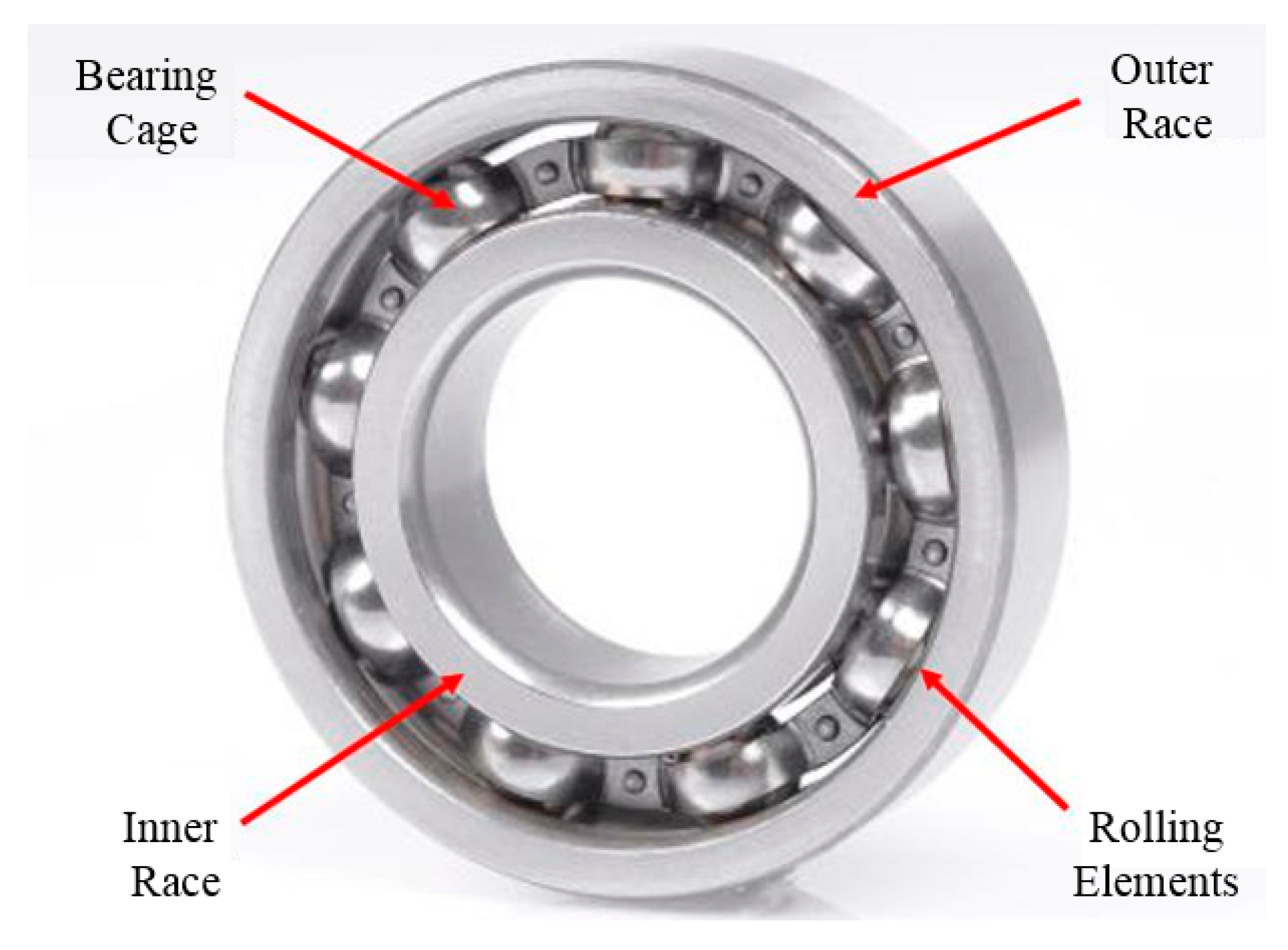
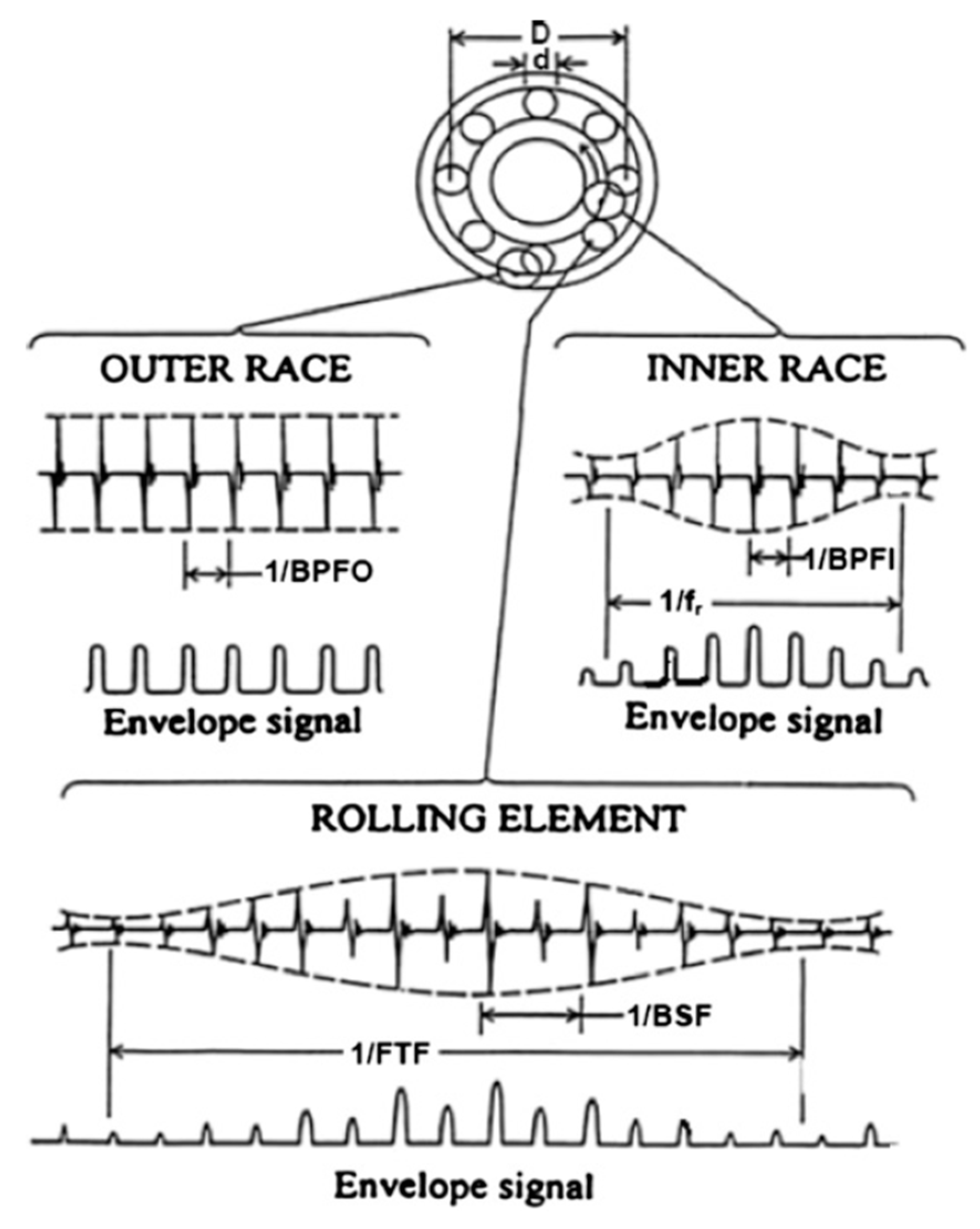
2.1. Description of IMS Dataset 1
- is the frequency representing the fault signature on the outer race;
- is the frequency representing the fault signature on the inner race;
- is the frequency representing the fault signature on the bearing cage;
- is the frequency representing the fault signature on the rolling element.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Rexnord ZA-2115 |
| Pitch diameter D | 71.5 mm (2.815 inch) |
| Rolling element diameter d | 8.4 mm (0.331 inch) |
| Number of rolling elements per row n | 16 |
| Load contact angle ϕ | 15.17° |
| Static load Q | 26,690 N (6000 lbs.) |
| Shaft angular velocity ω | 2000 rpm |
2.2. Signal Analysis Techniques
- Mean;
- Variance;
- Standard Deviation;
- Pea;
- Root Mean Squared value (RMS);
- Skewness;
- Crest Facto;
- Clearance Factor;
- Shape Factor;
- Impulse Factor;
- Peak-to-Peak;
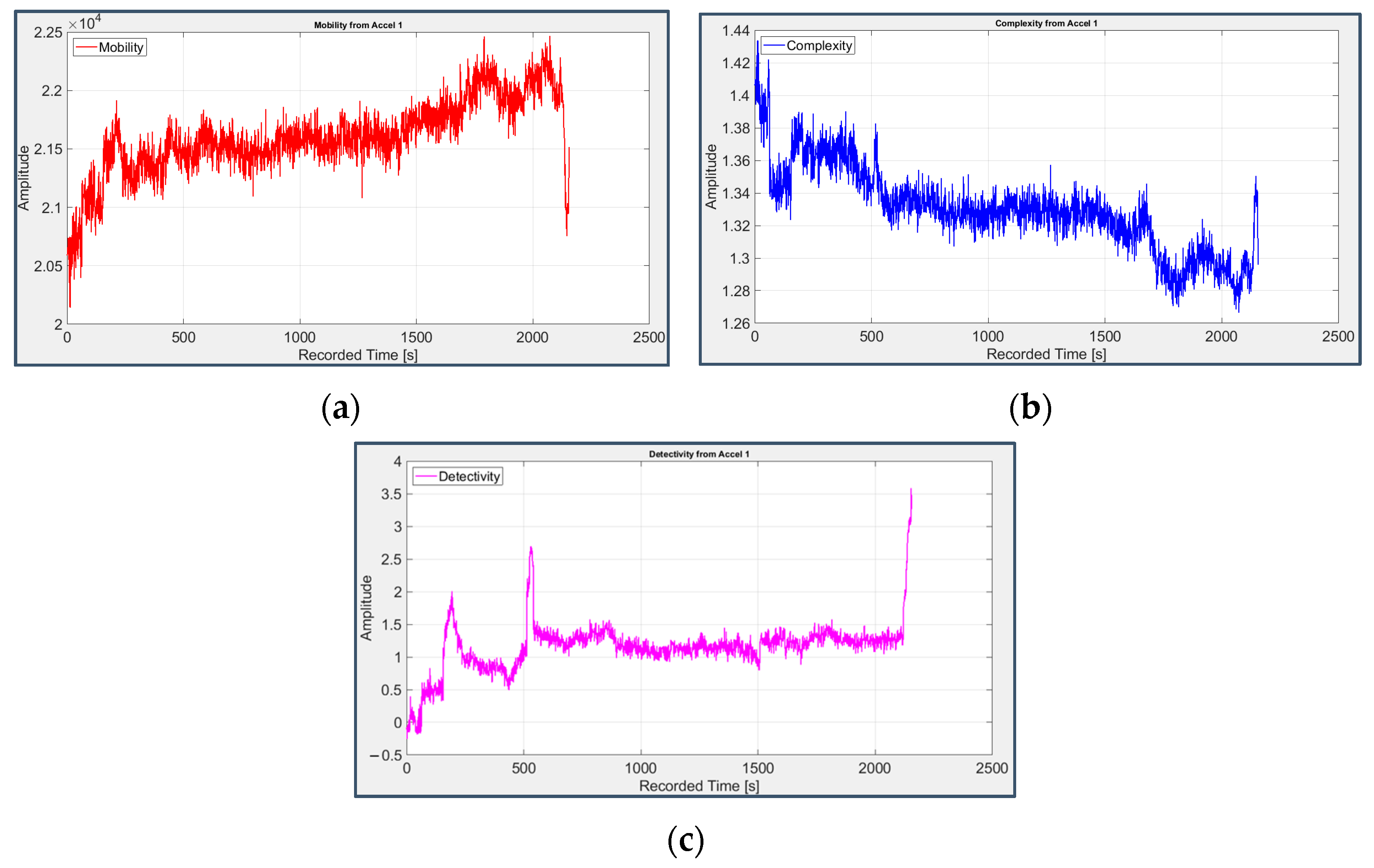
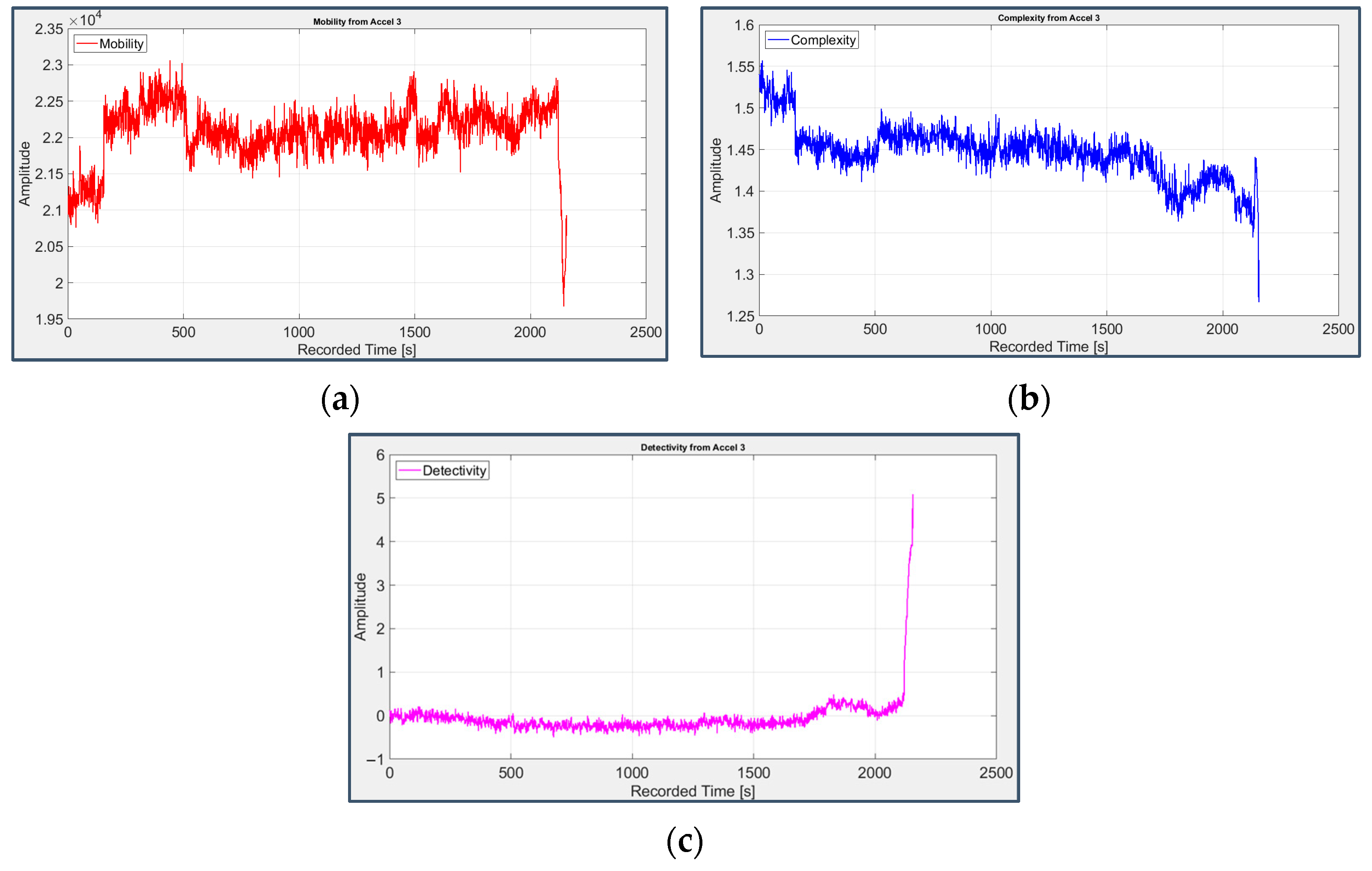
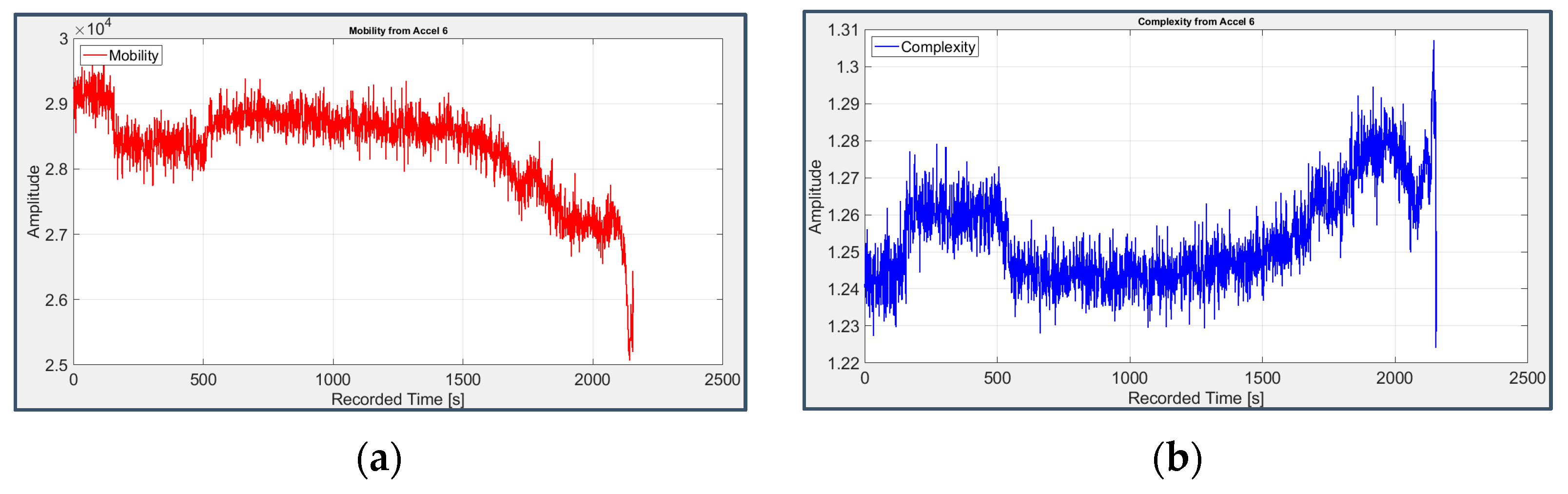
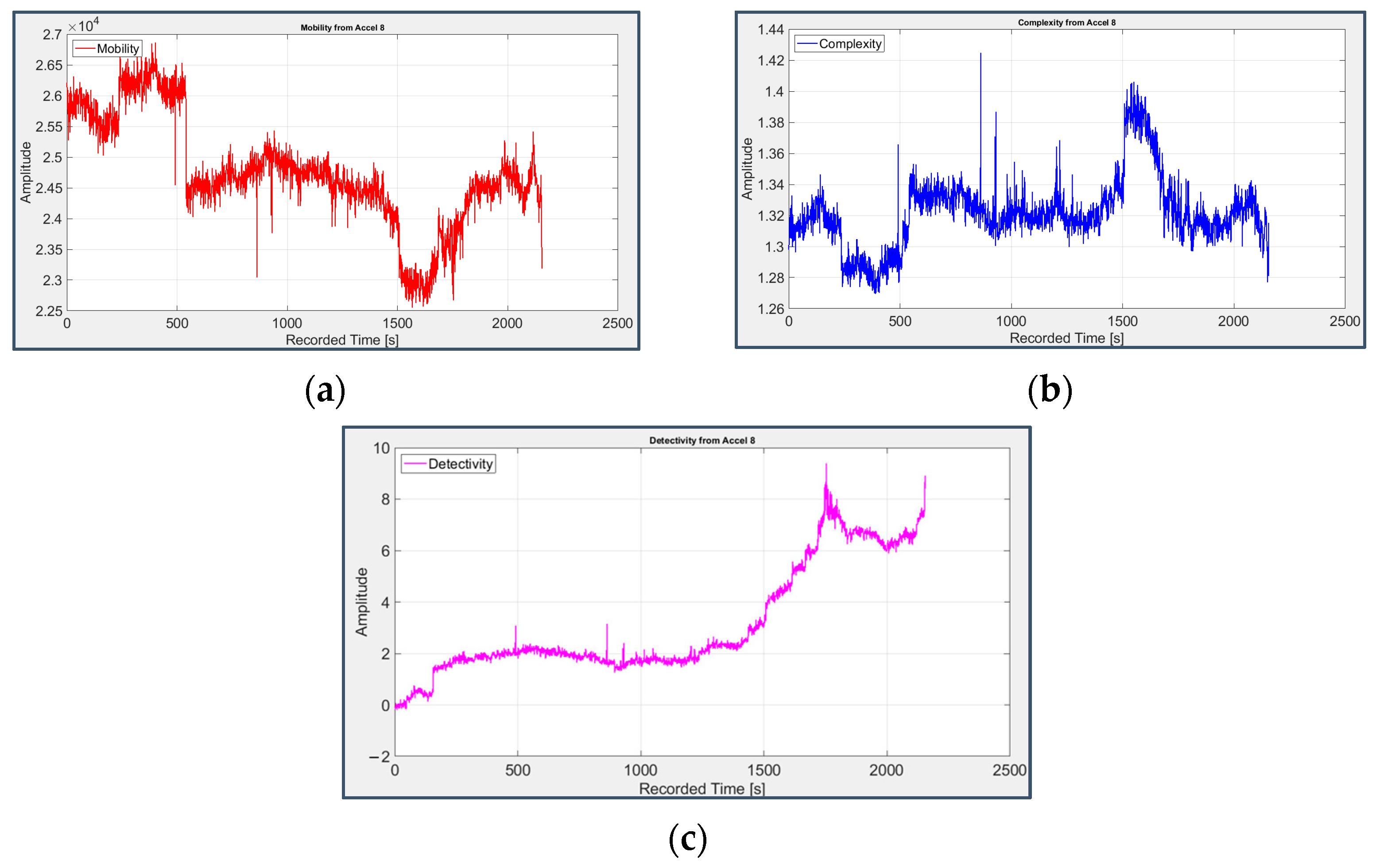
- Hjorth’s Parameters;
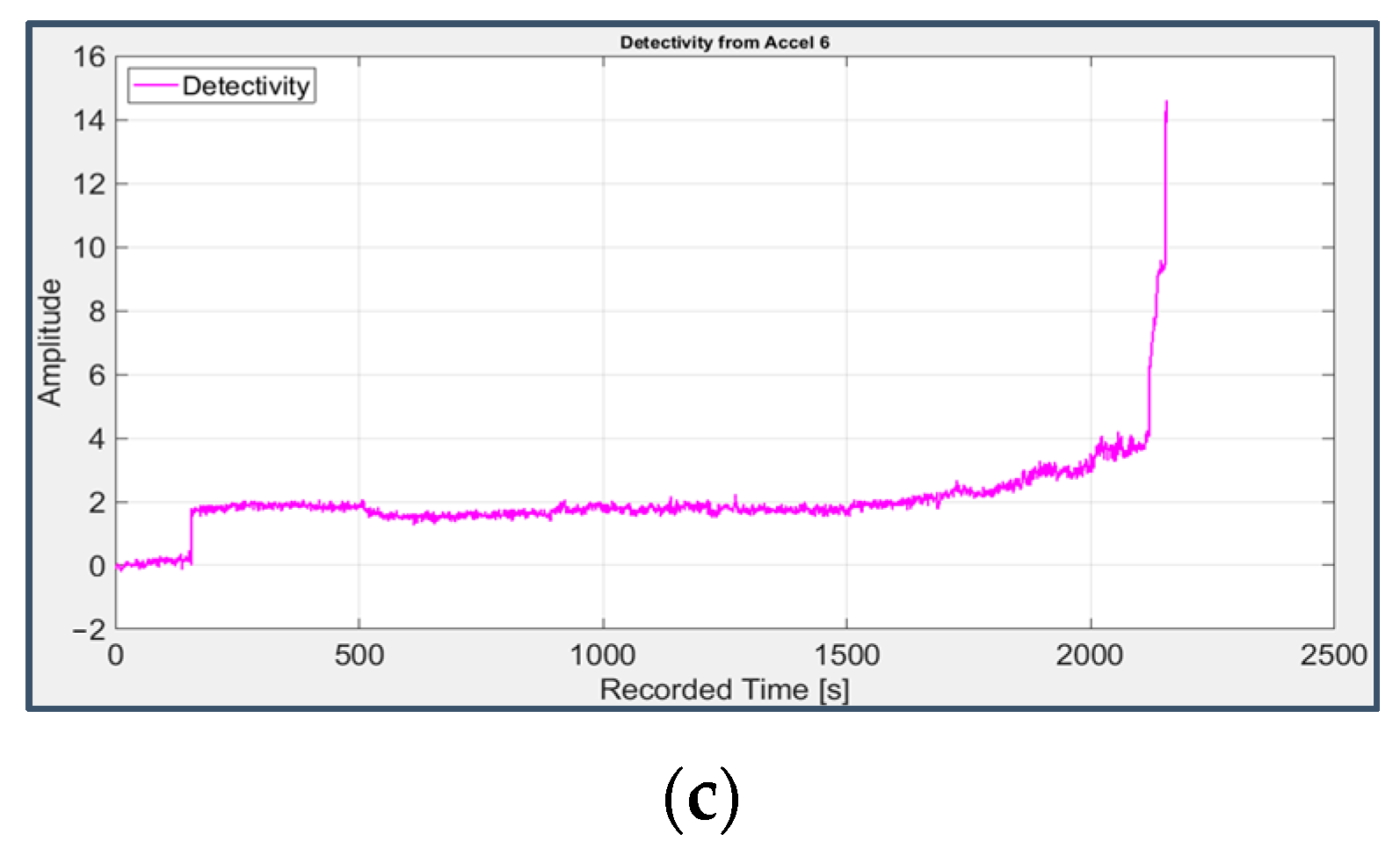
- Detectivity.
- Short-Time Fourier Transform (STFT);
- Power Spectral Density (PSD);
- Squared Envelope Spectrum (SES);
- Autoregressive Linear Prediction (ALP);
- Time-Synchronous Averaging (TSA);
- Kurtosis (time domain);
- Kurtogram.
- Daubechies’ Wavelets;
- Cepstrum Pre-Whitening (CPW).
- Filters:
- FIR;
- Adaptive.
- Spectral Correlation (SC);
- Cyclic Spectral Coherence (CSC);
- Improved Envelope Spectrum (IES);
- Wigner–Ville Distribution (WVD).
- Correlation;
- Monotonicity;
- Robustness.
3. Results
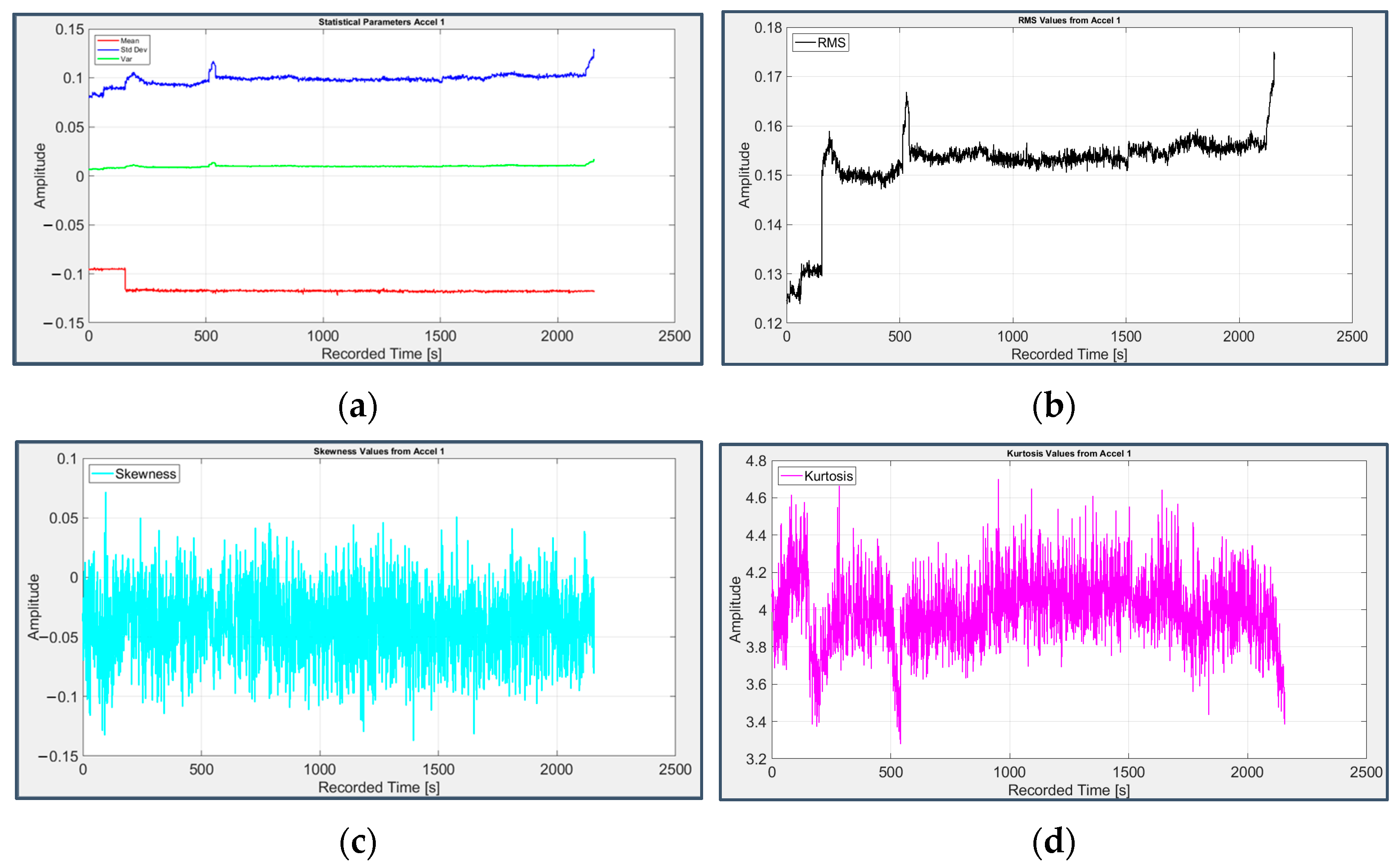
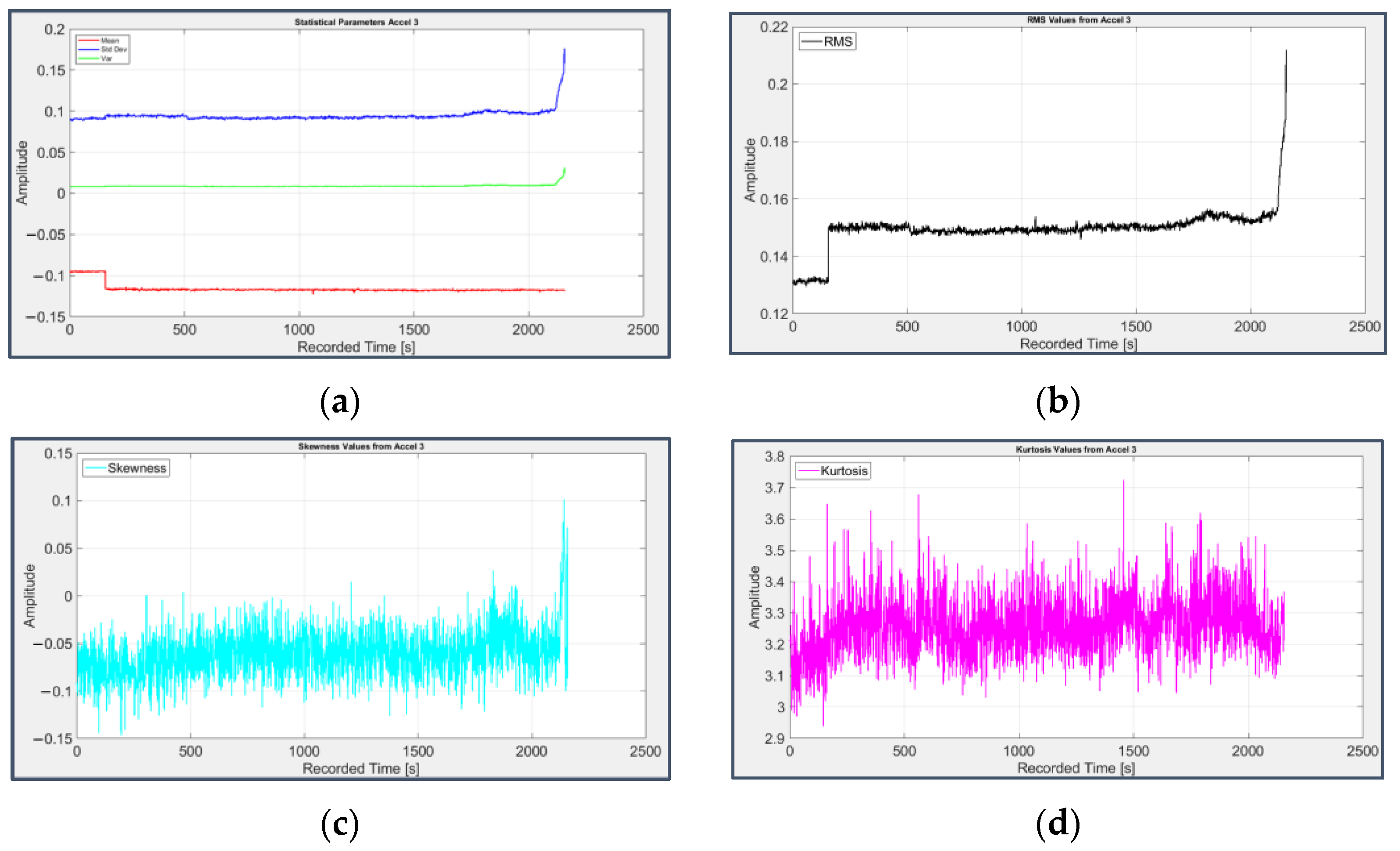
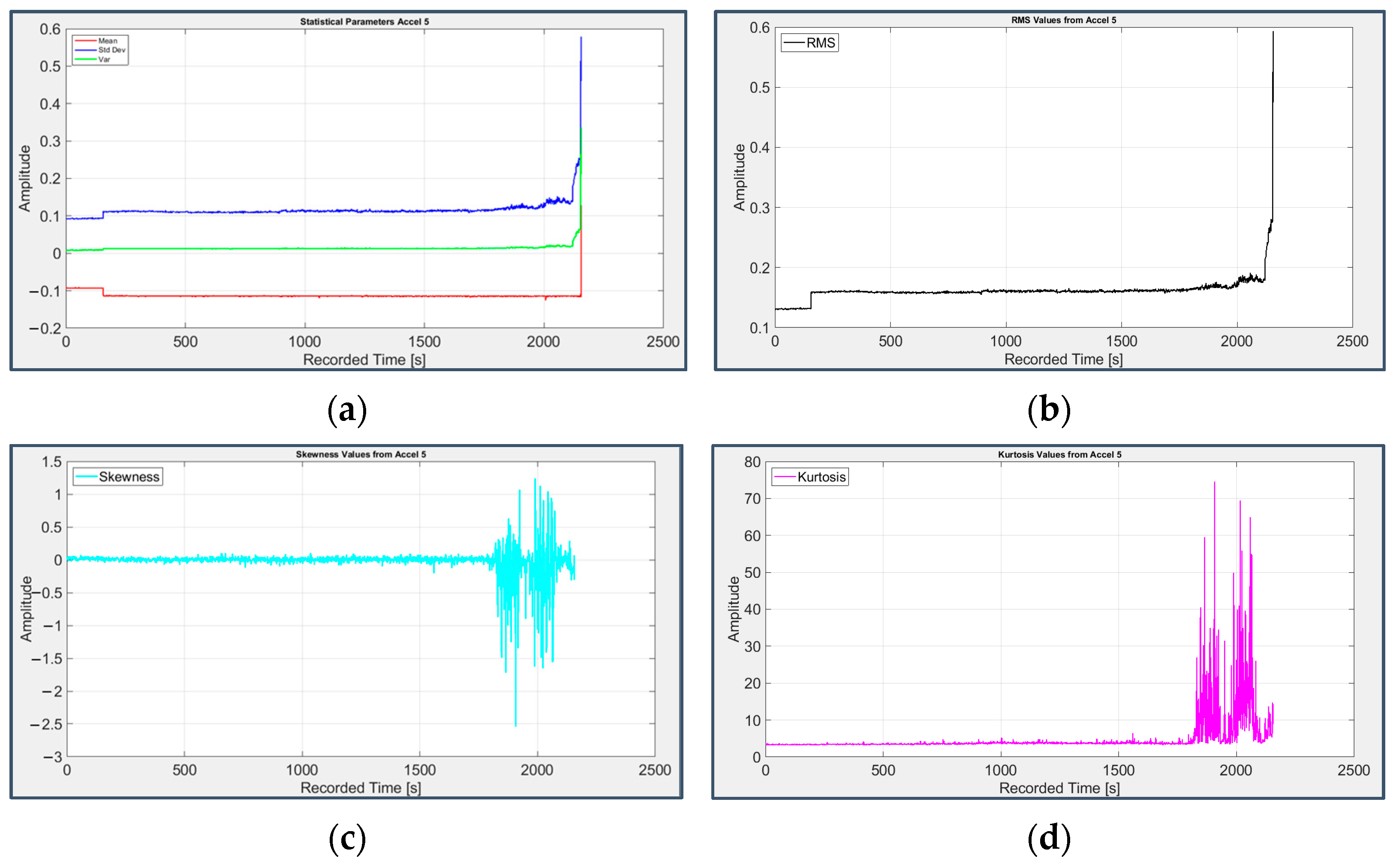
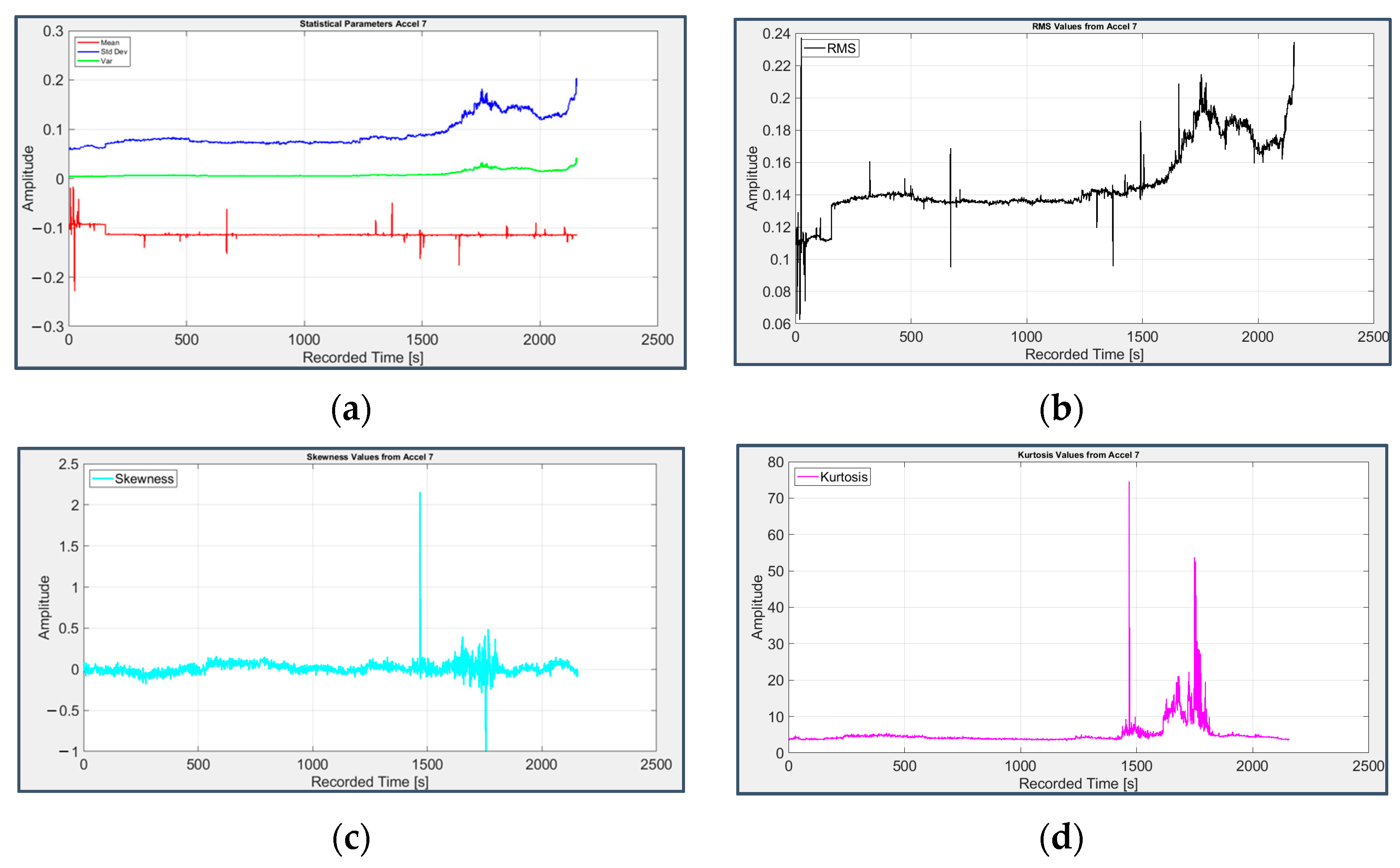
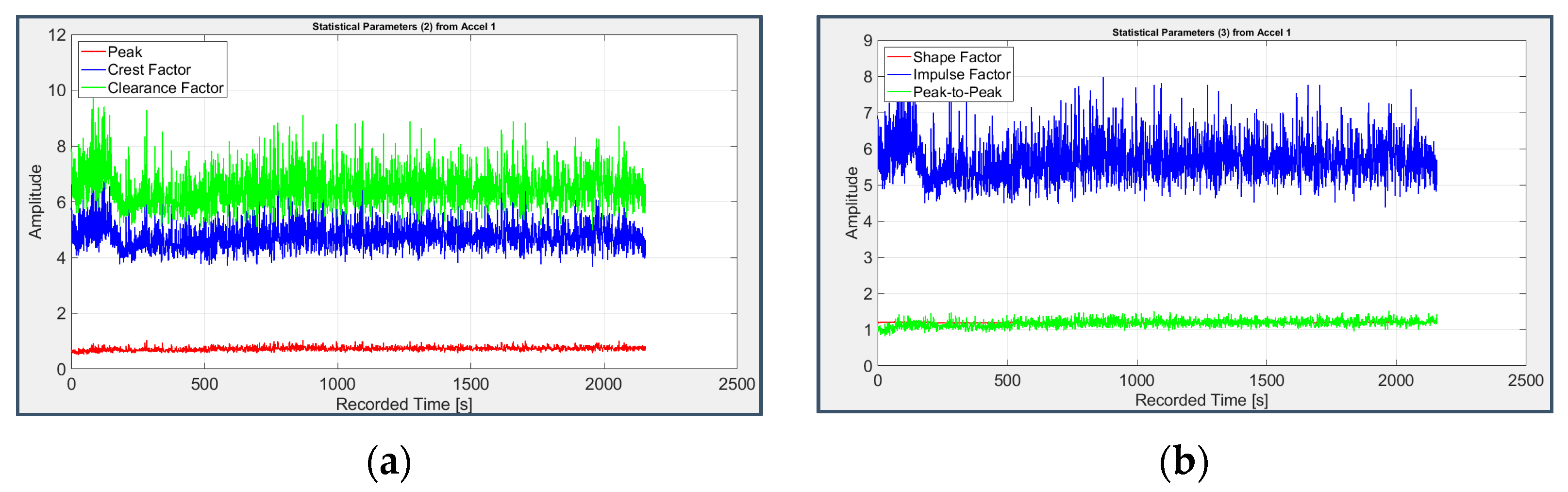
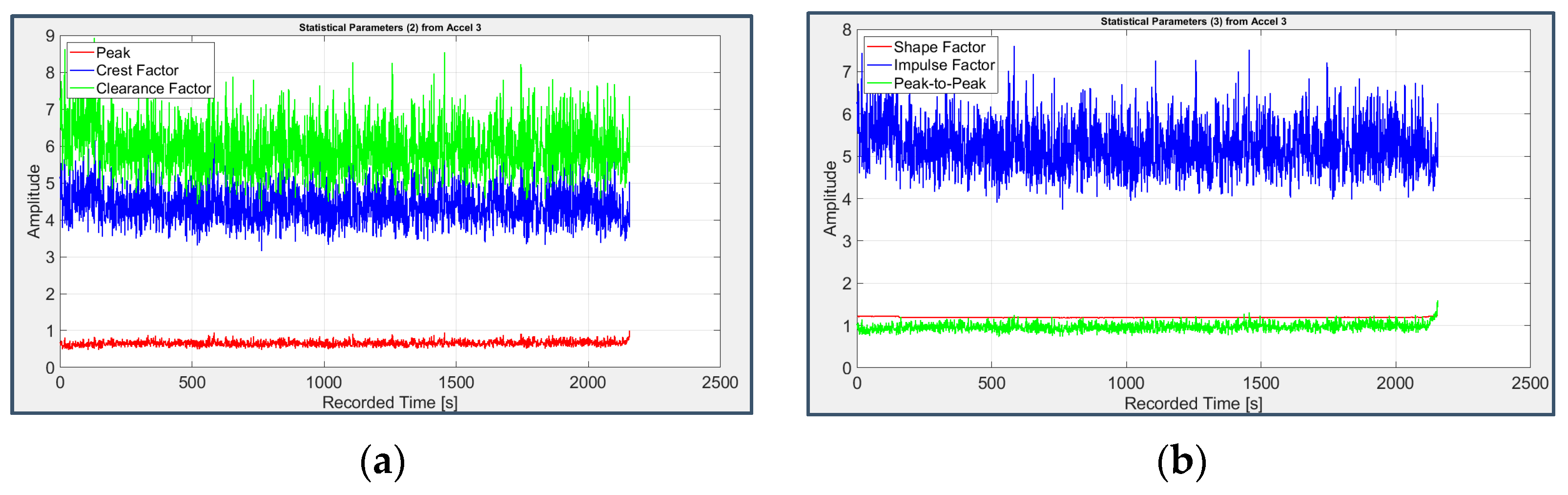
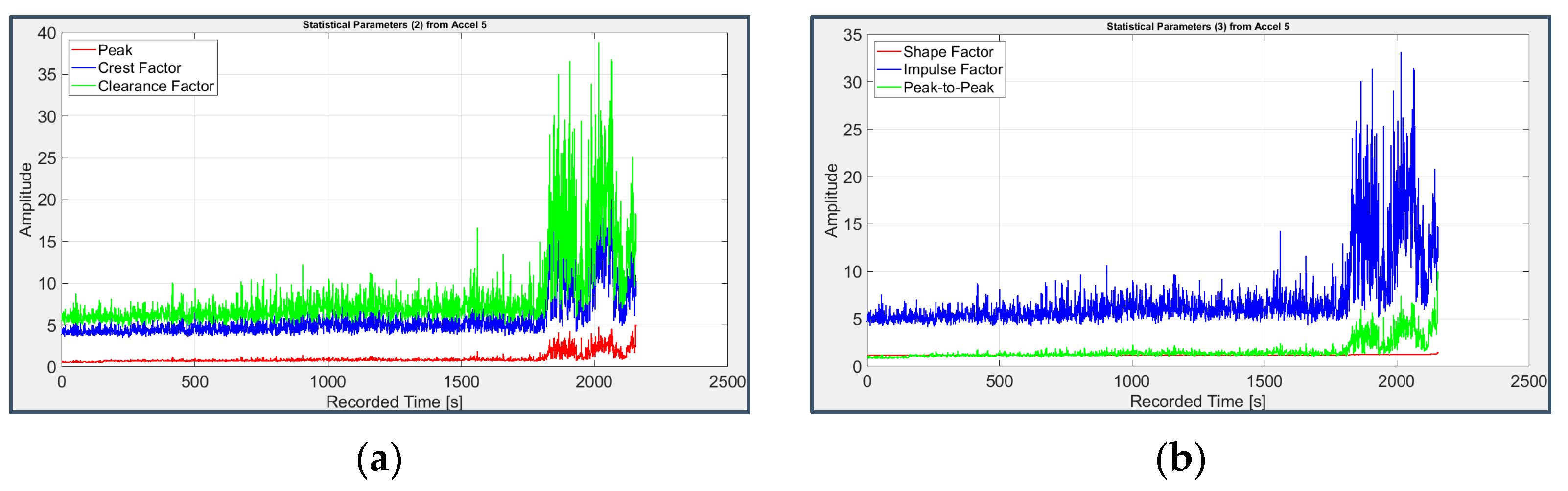
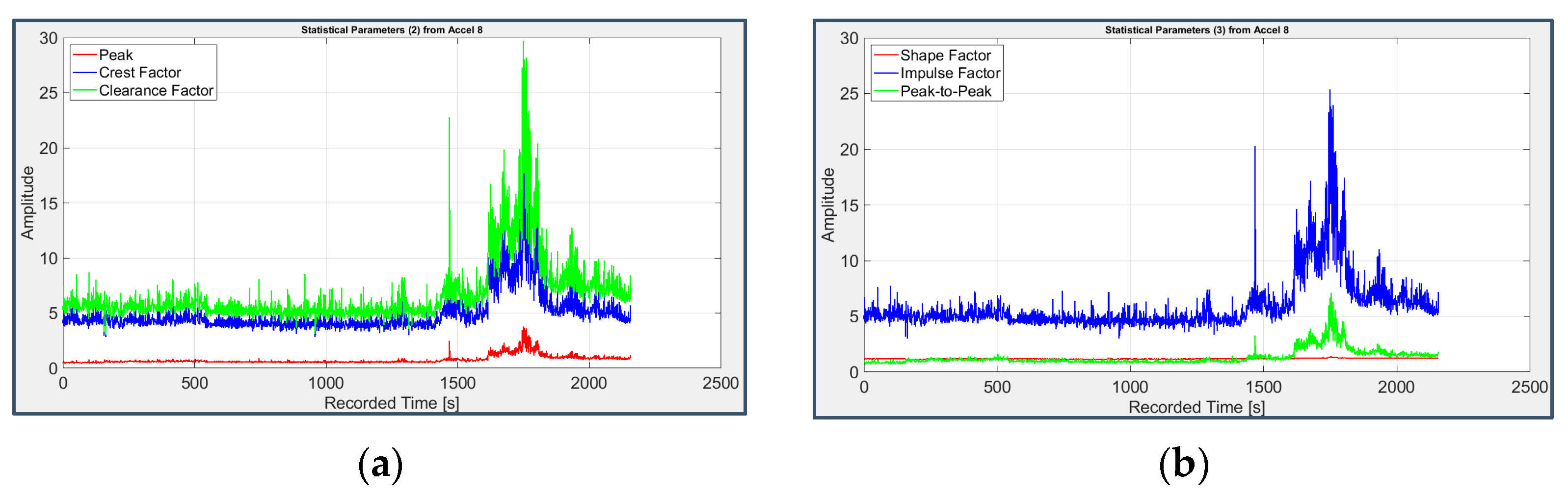
3.1. Fault Detection
3.2. Fault Diagnosis
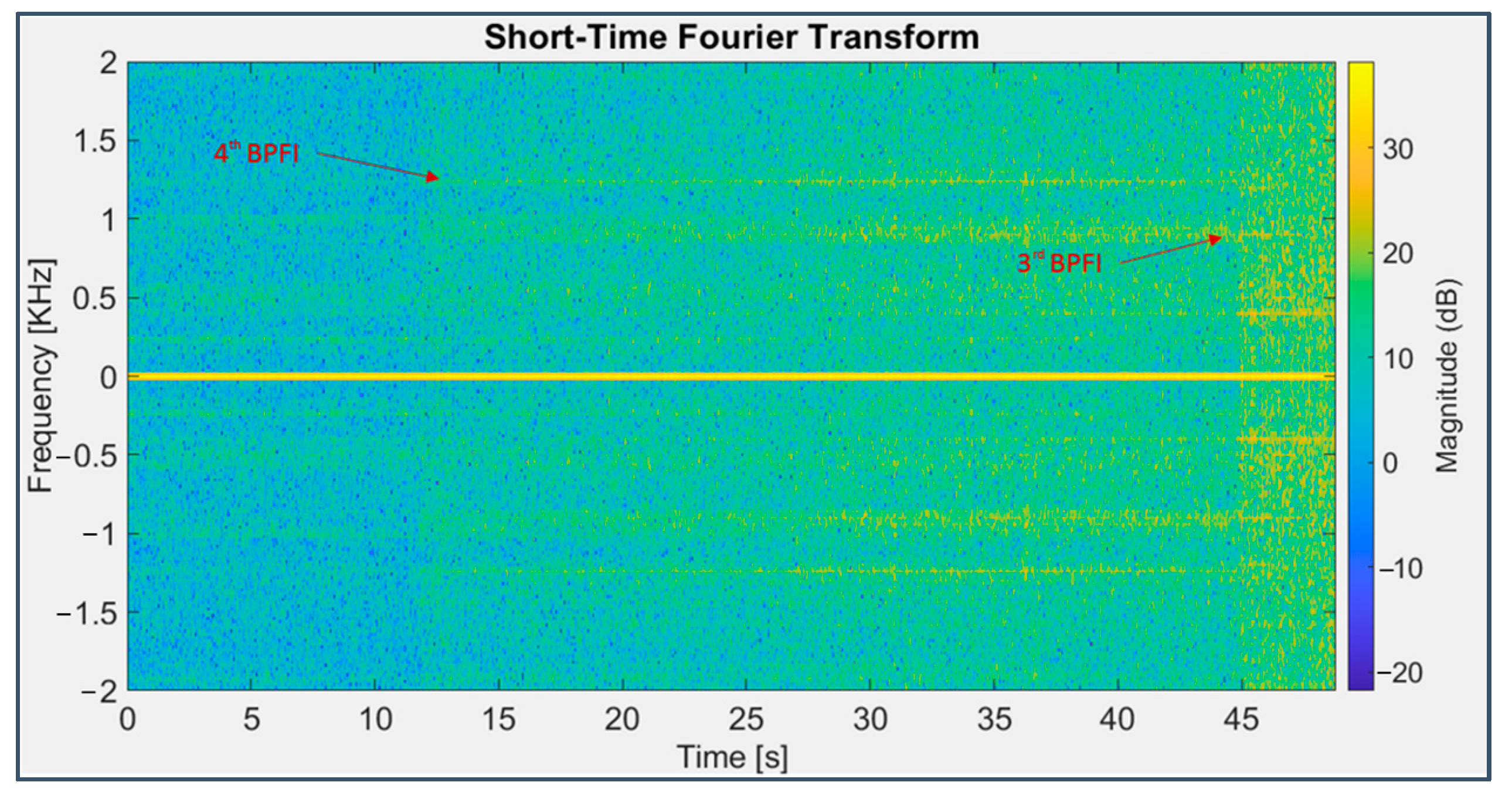
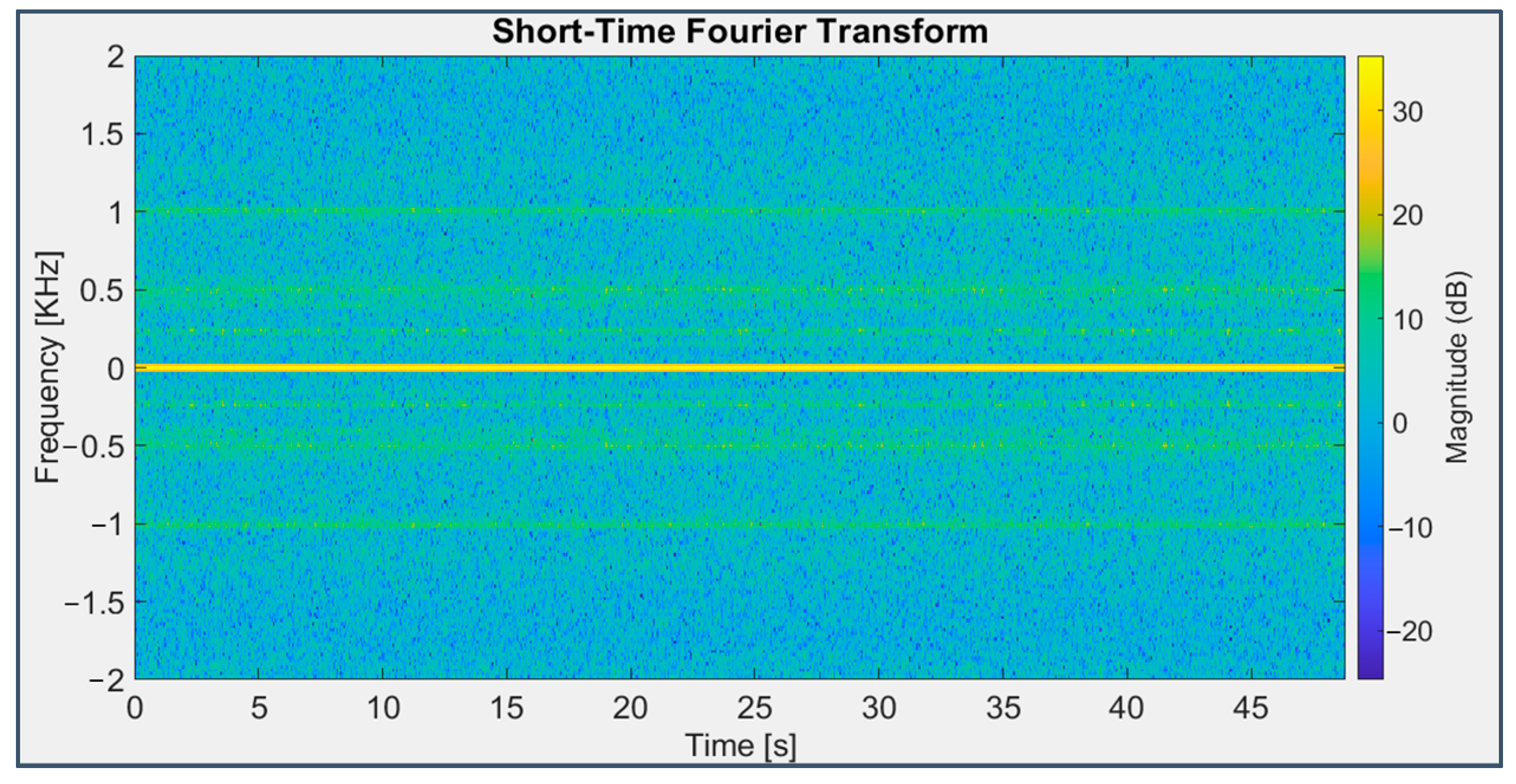
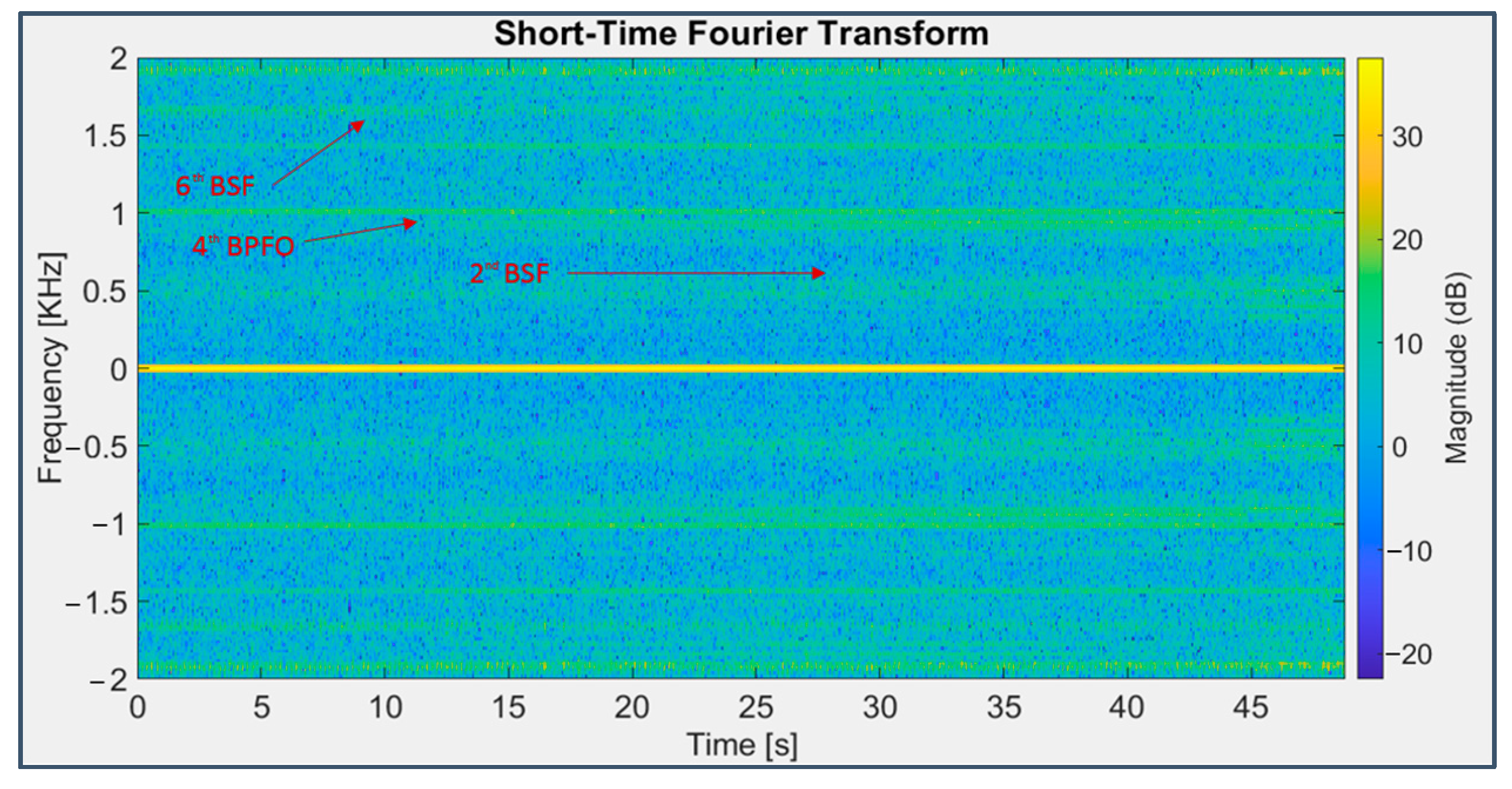
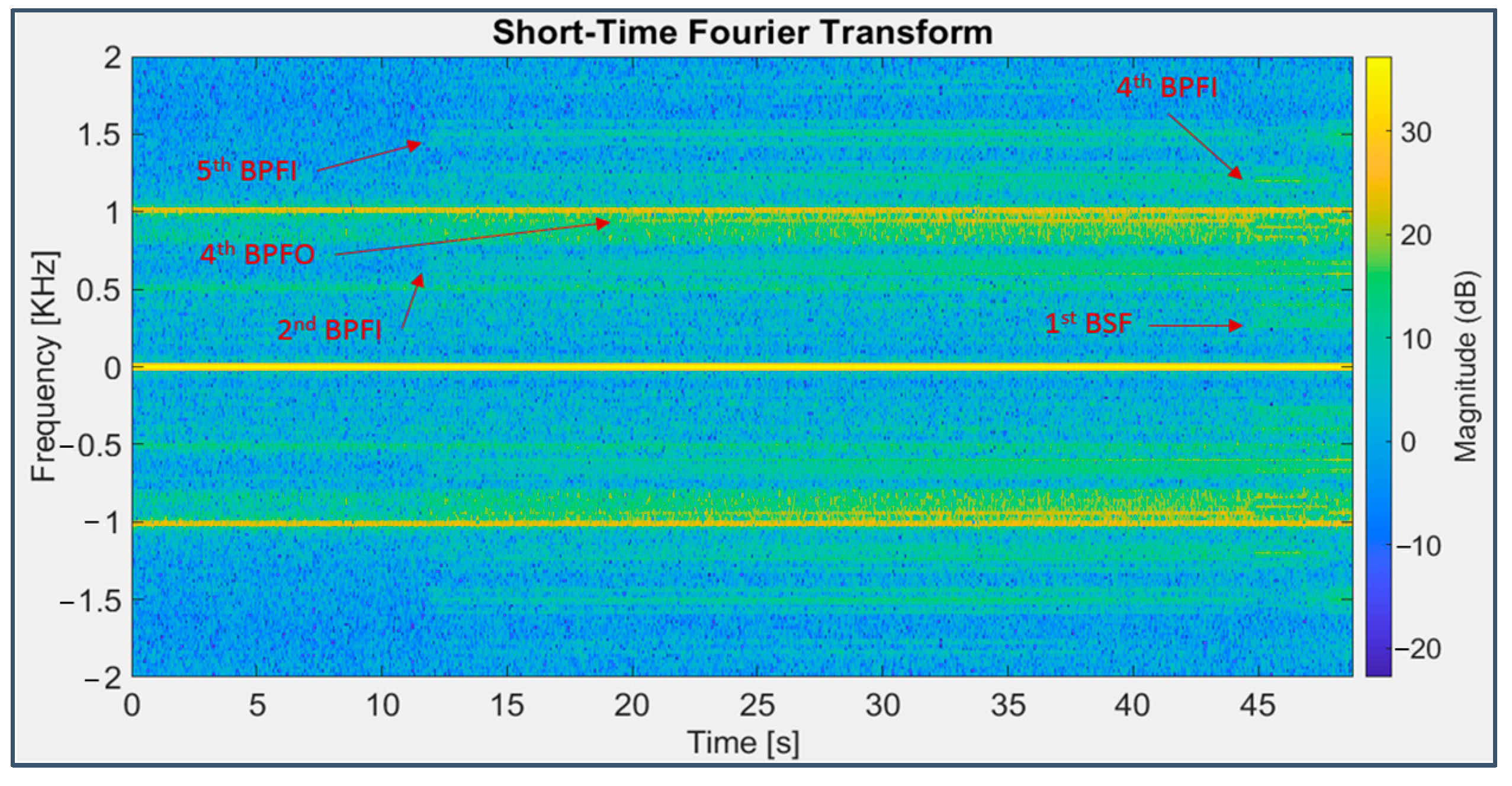
3.2.1. Short-Time Fourier Transform (STFT)
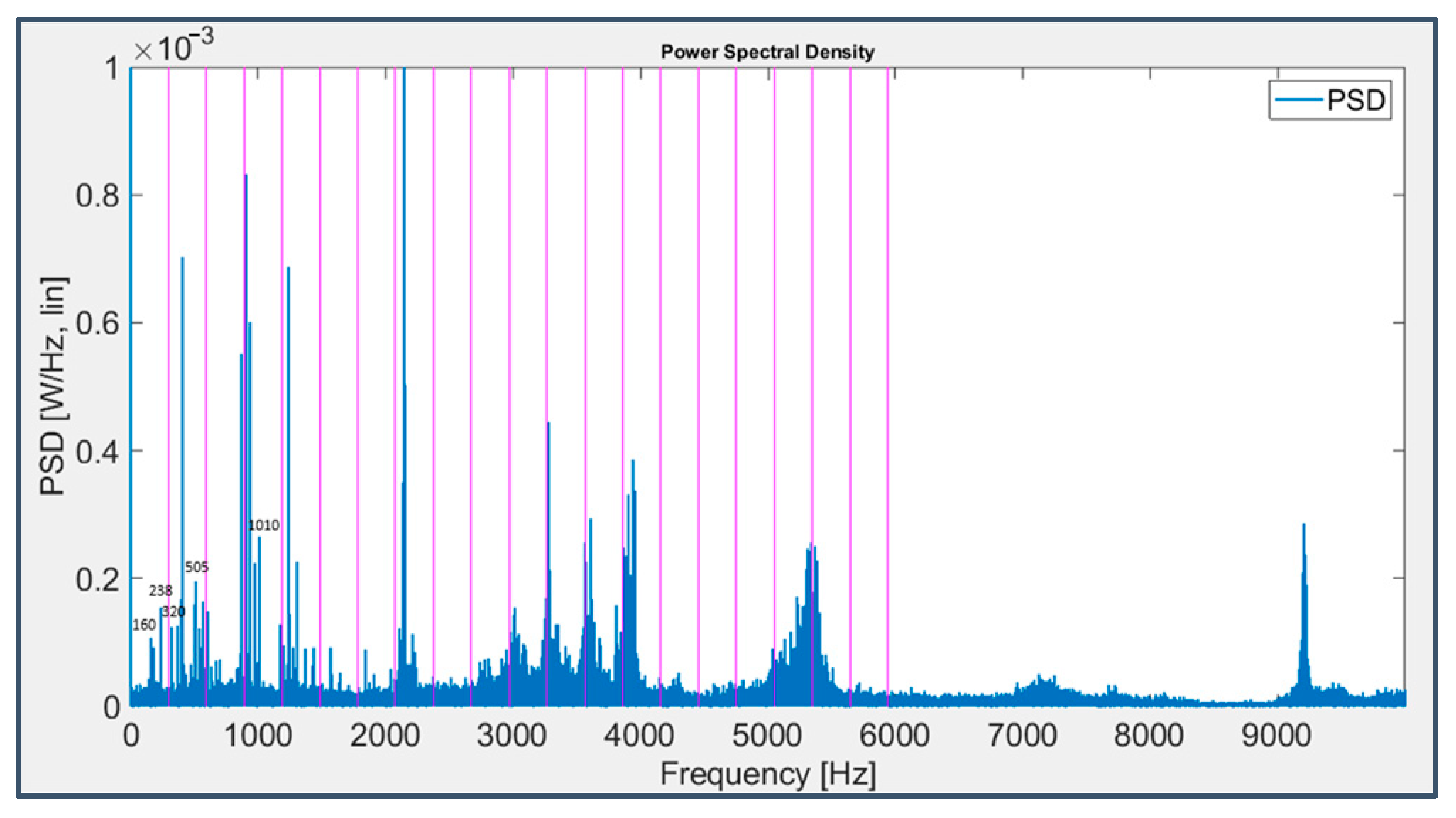
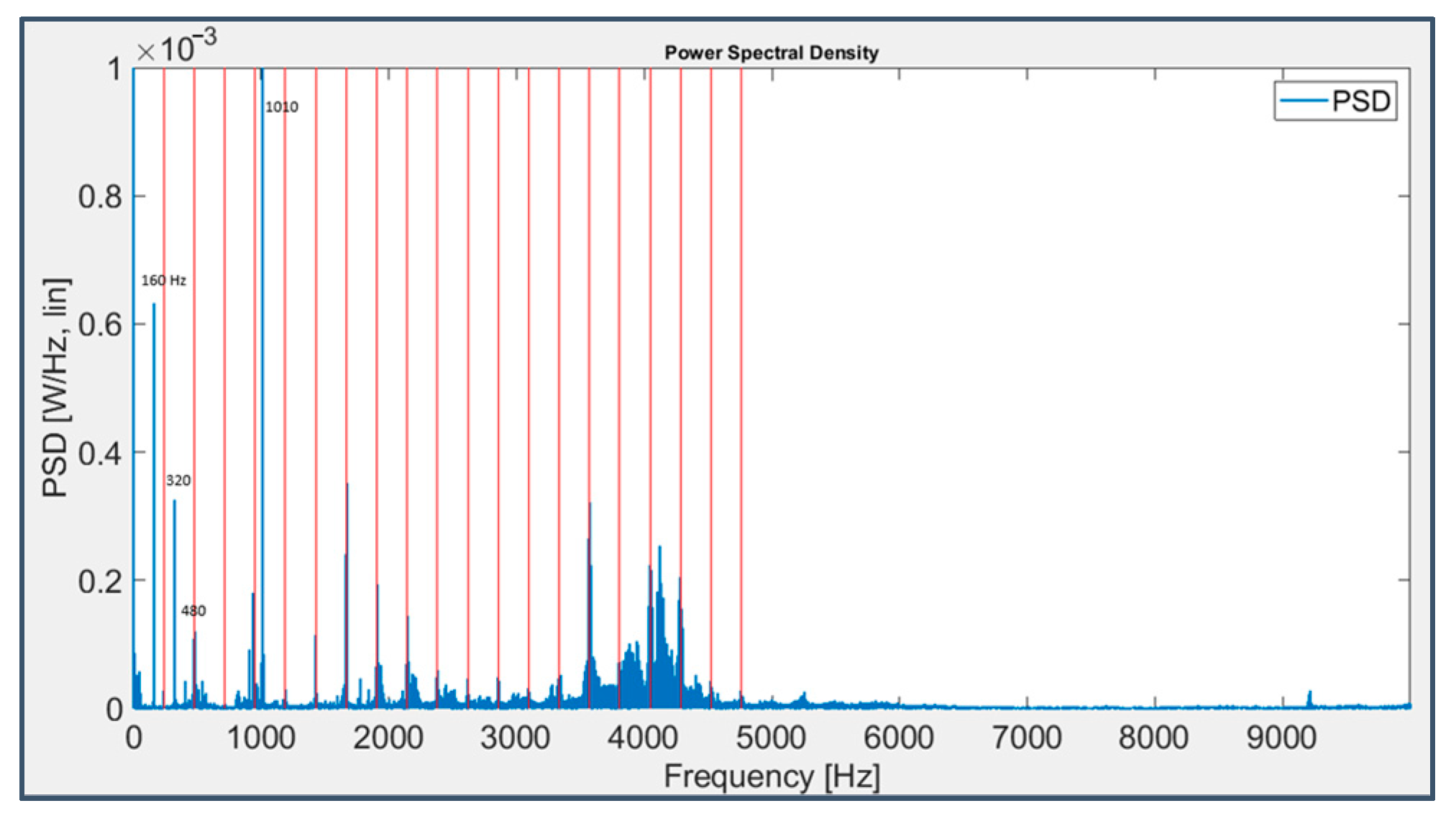
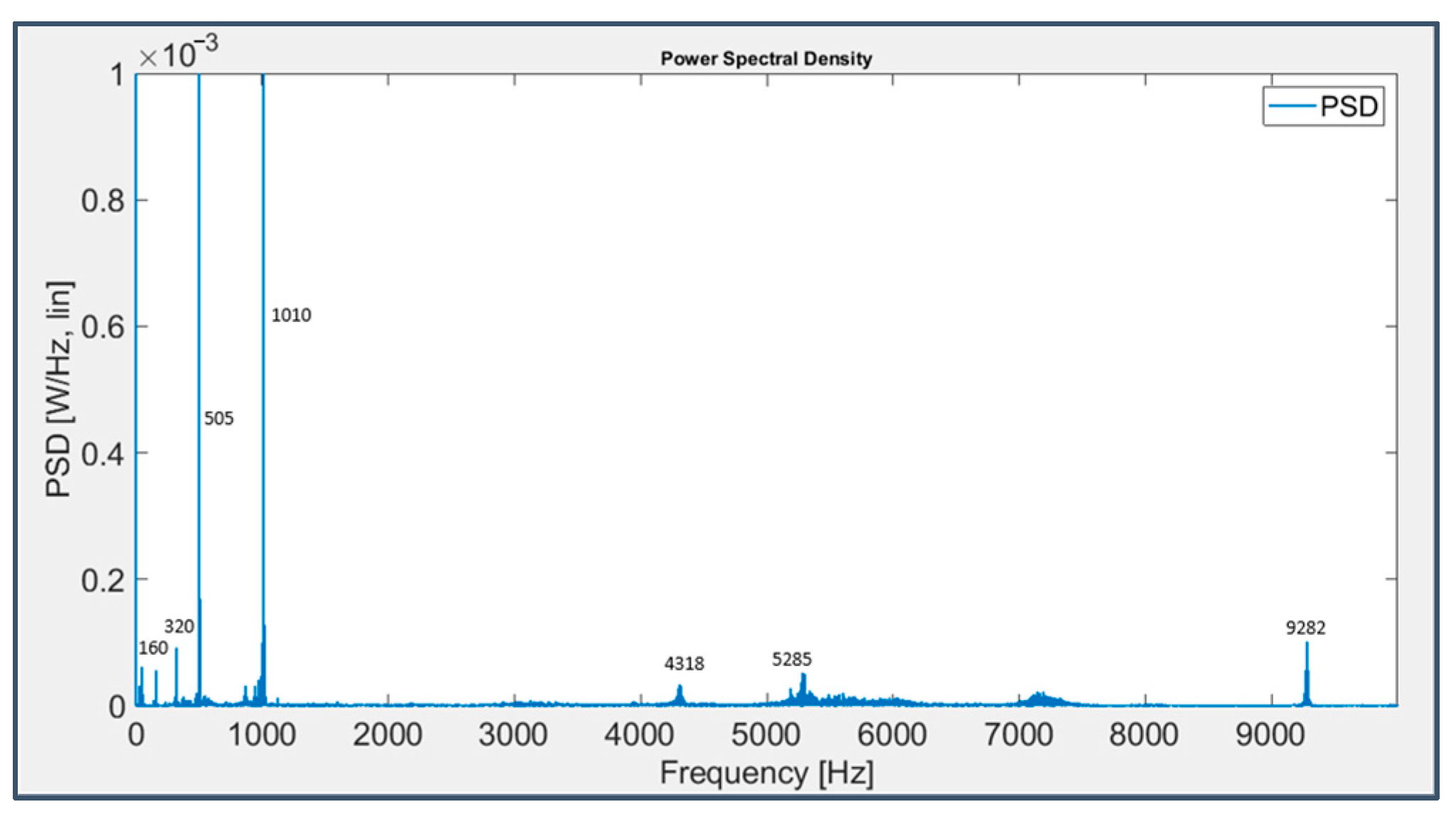
3.2.2. Power Spectral Density (PSD)
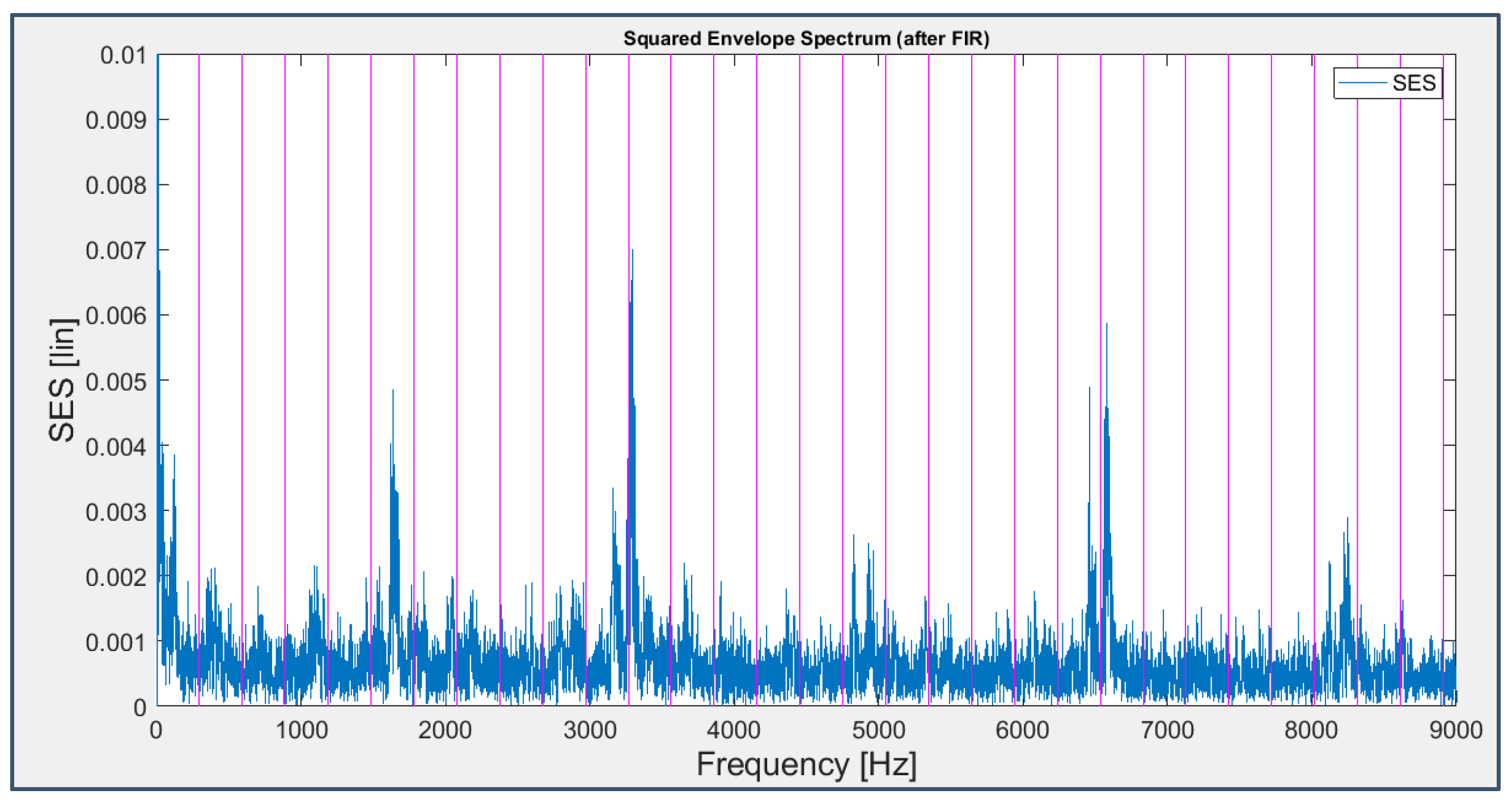
3.2.3. Squared Envelope Spectrum (SES)
3.2.4. Time-Synchronous Average (TSA)
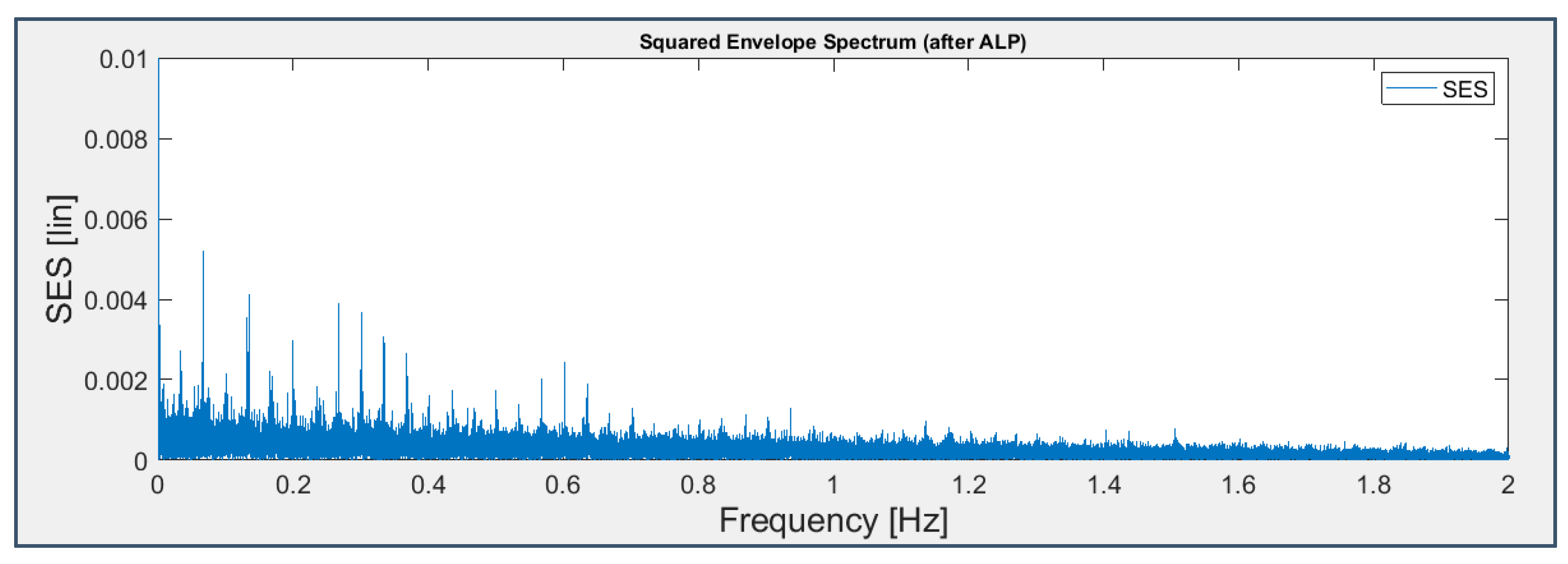
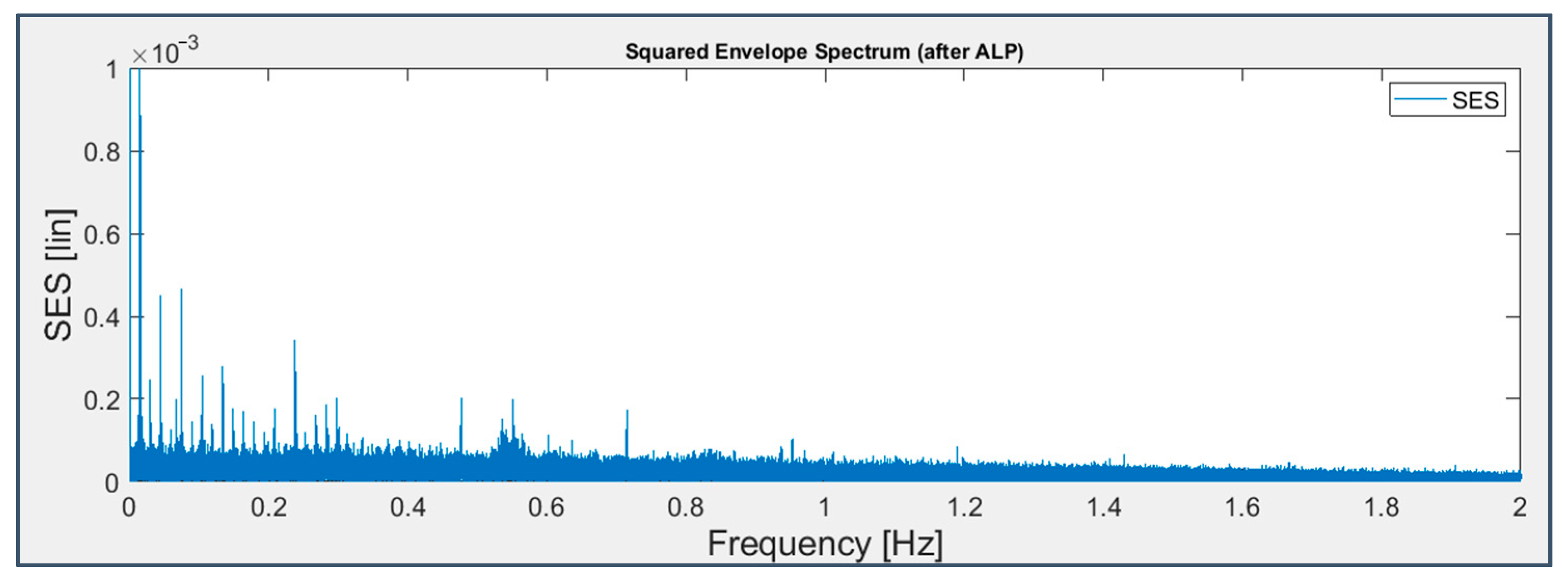
3.2.5. Autoregressive Linear Prediction (ALP)
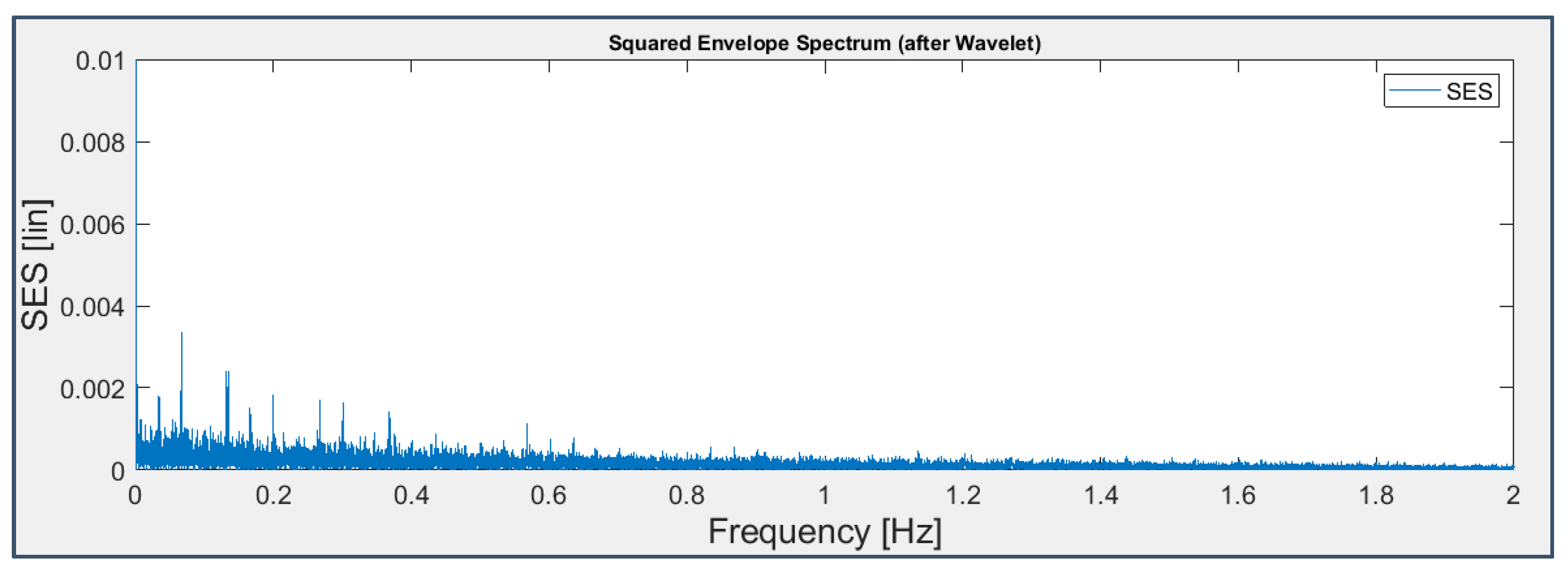
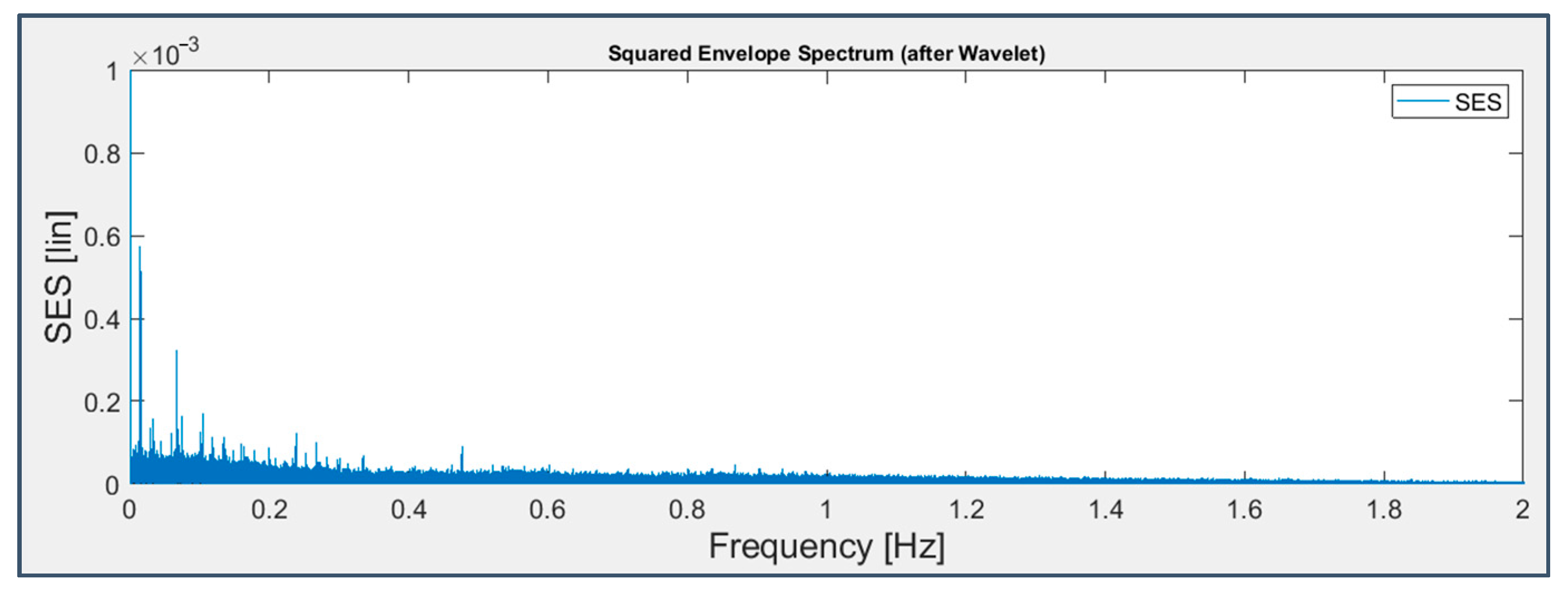
3.2.6. Daubechies’ Wavelets
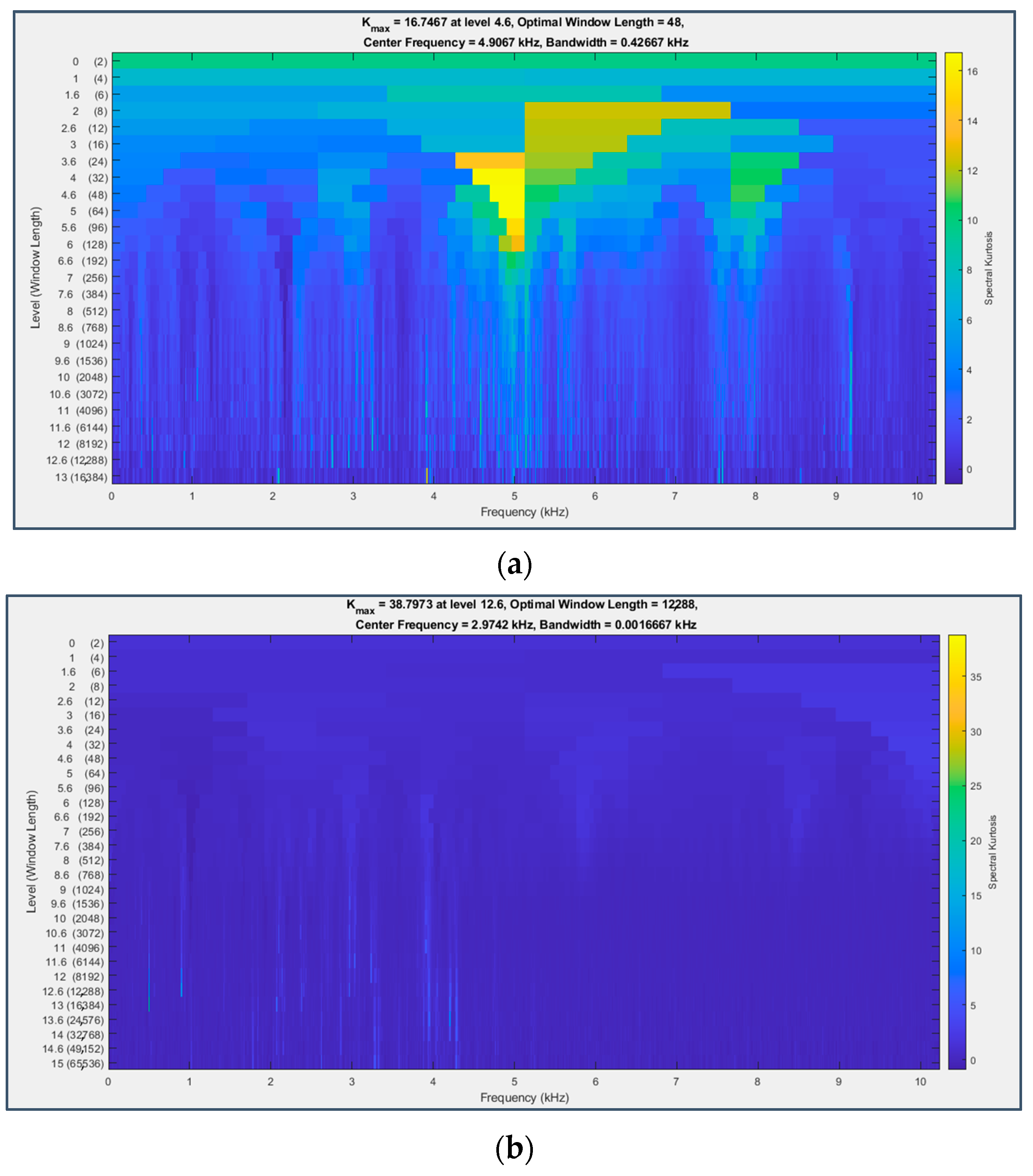
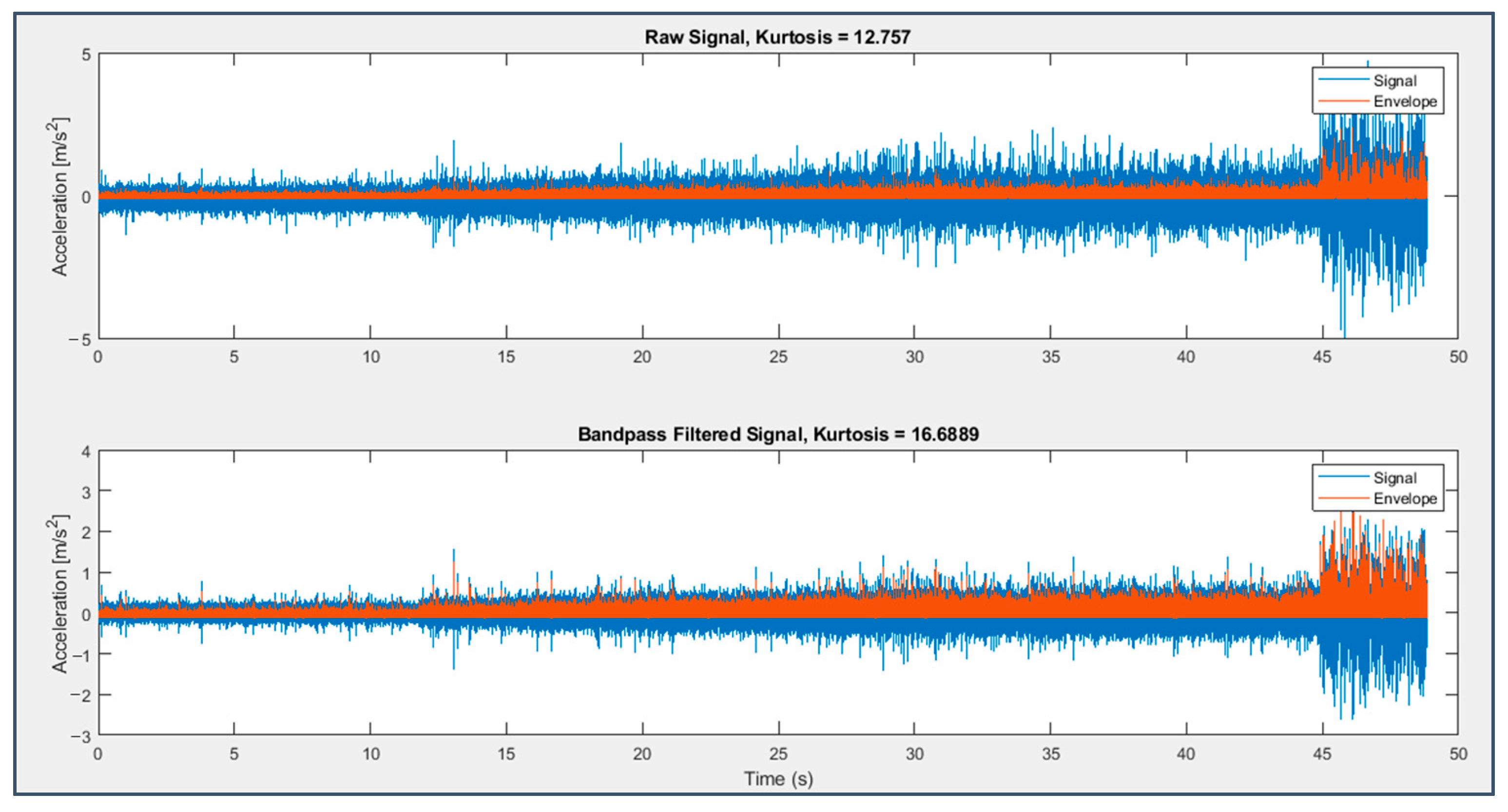
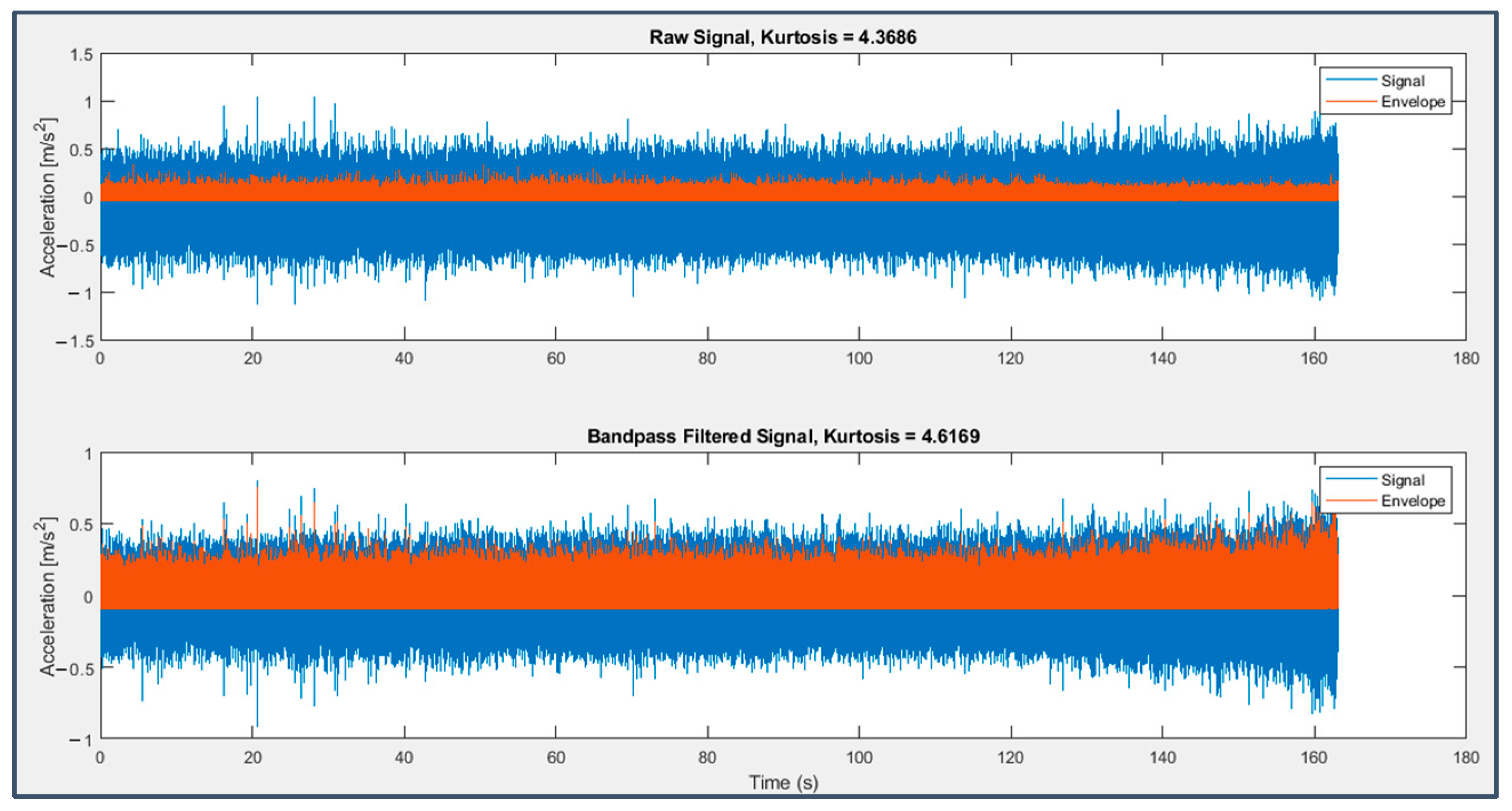
3.2.7. Kurtogram and Filters
3.2.8. Cepstrum Pre-Whitening (CPW)
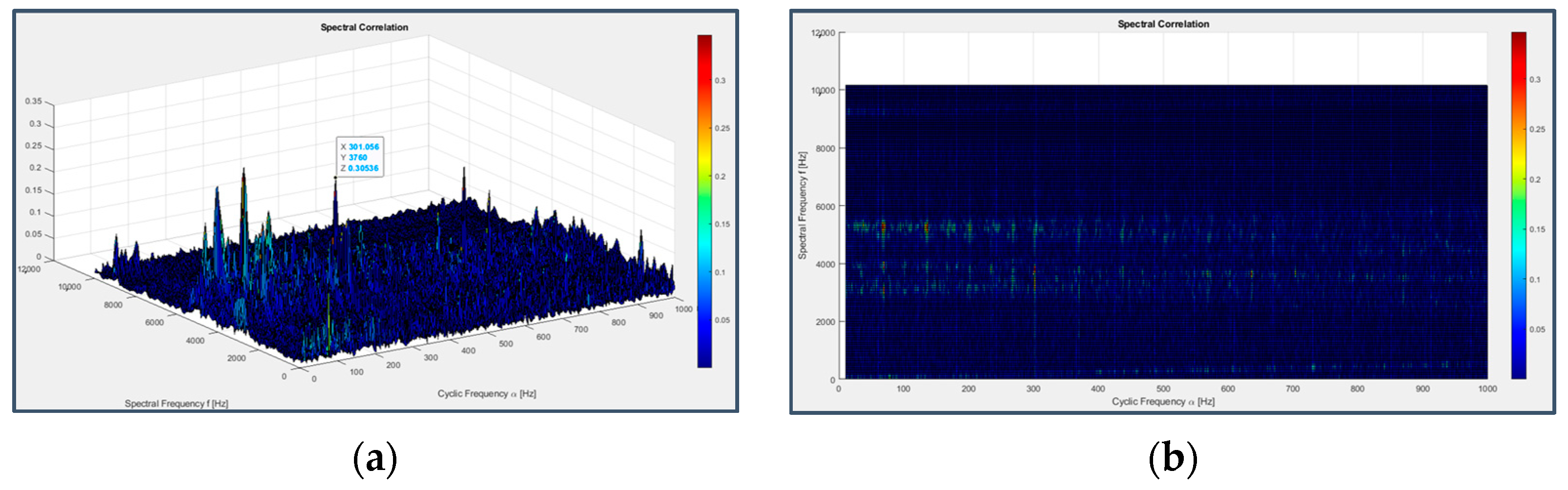
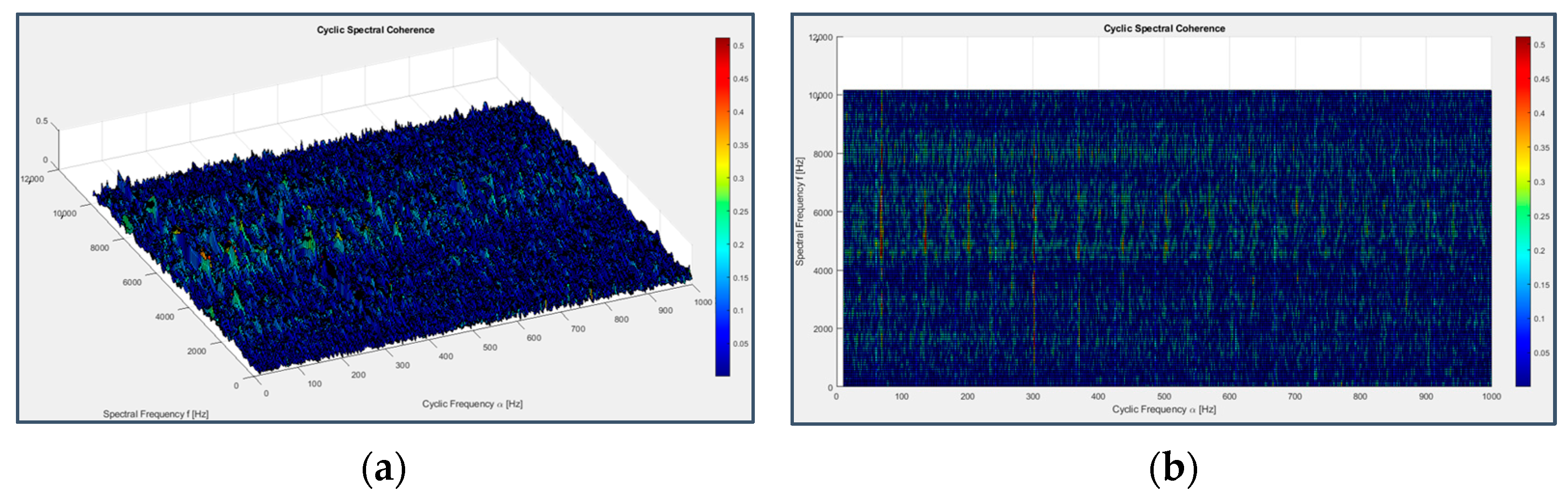
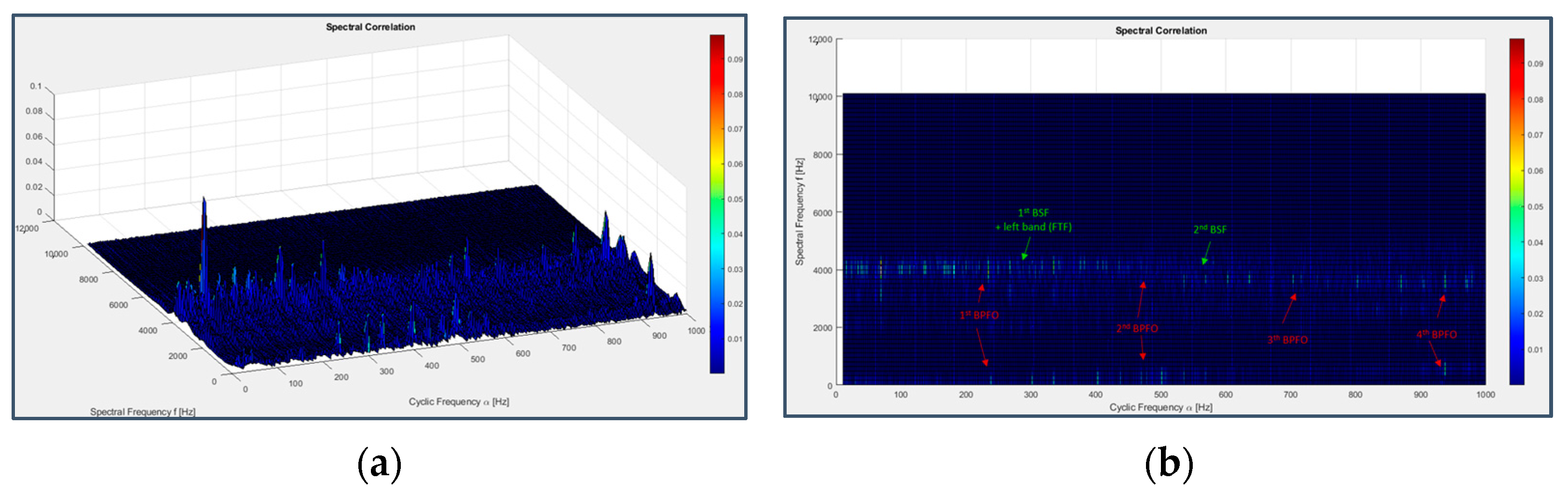
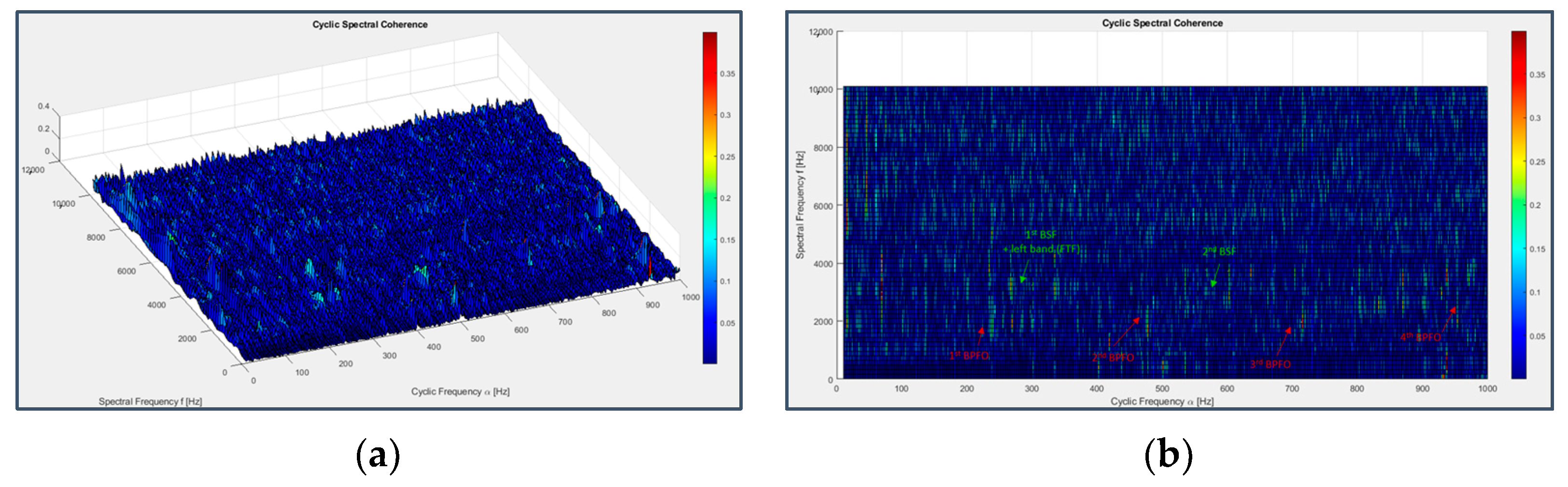
3.2.9. Cyclostationary Analysis
3.2.10. Wigner–Ville Distribution (WVD)
3.2.11. Comparisons
- STFT. Advantages: able to detect the higher-order harmonics of the BPFI for bearing 3 and of the BPFO and BSF for bearing 4. Disadvantages: not able to detect the corresponding first-order harmonics.
- PSD. Advantages: able to detect some harmonics of the BPFI for bearing 3 and of the BPFO for bearing 4. Disadvantages: not able to detect the harmonics of the BSF for bearing 4, and presence of frequency lines related to structural resonances.
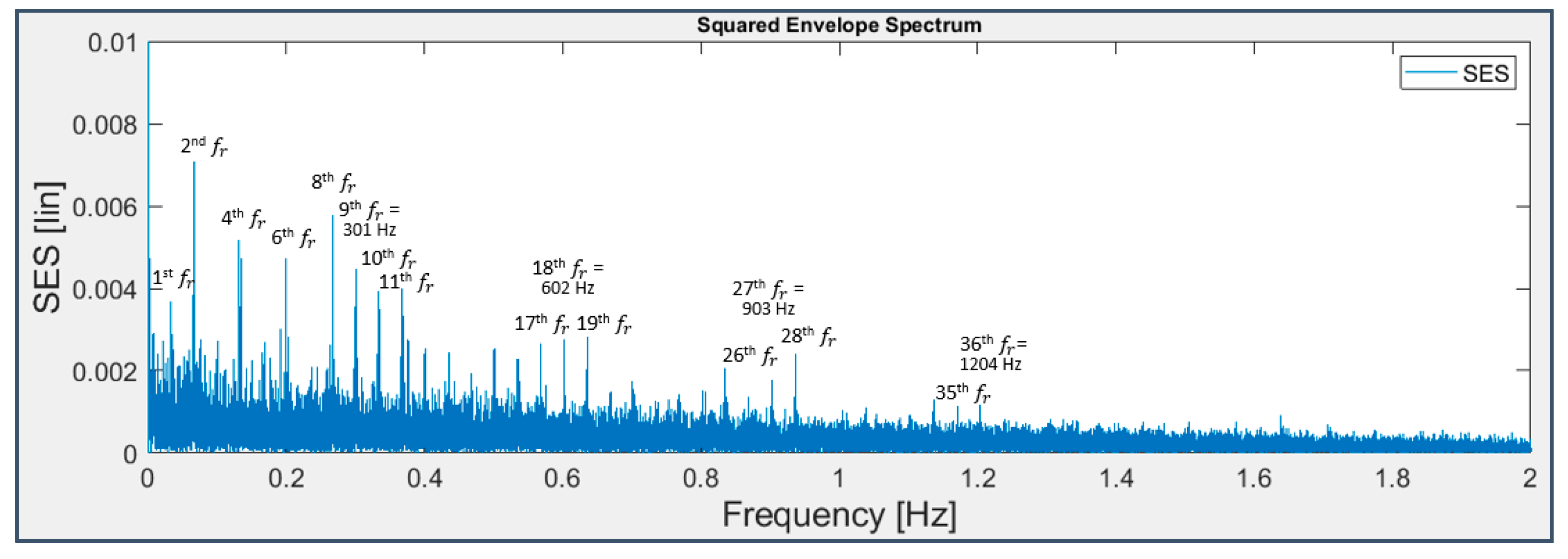
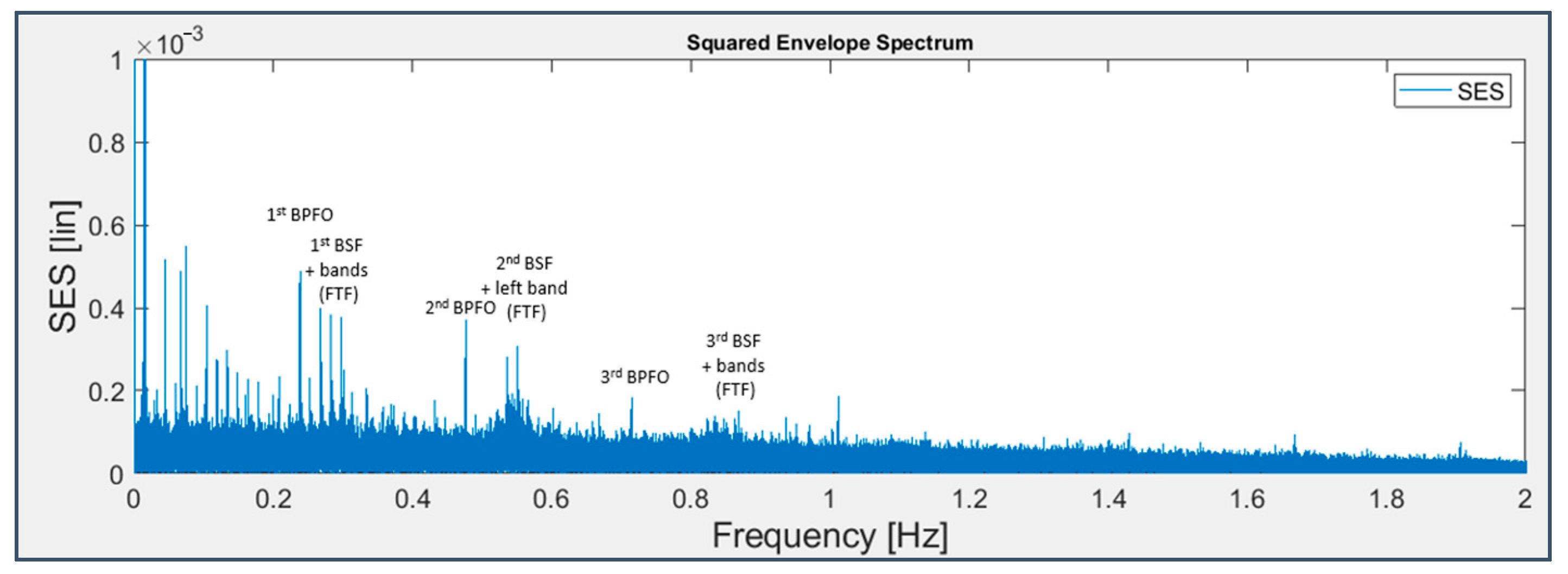
- SES. Advantages: able to detect the harmonics of the shaft rotation frequency and BPFI for bearing 3 and of the BPFO and BSF for bearing 4. Disadvantages: presence of high noise and masking components.
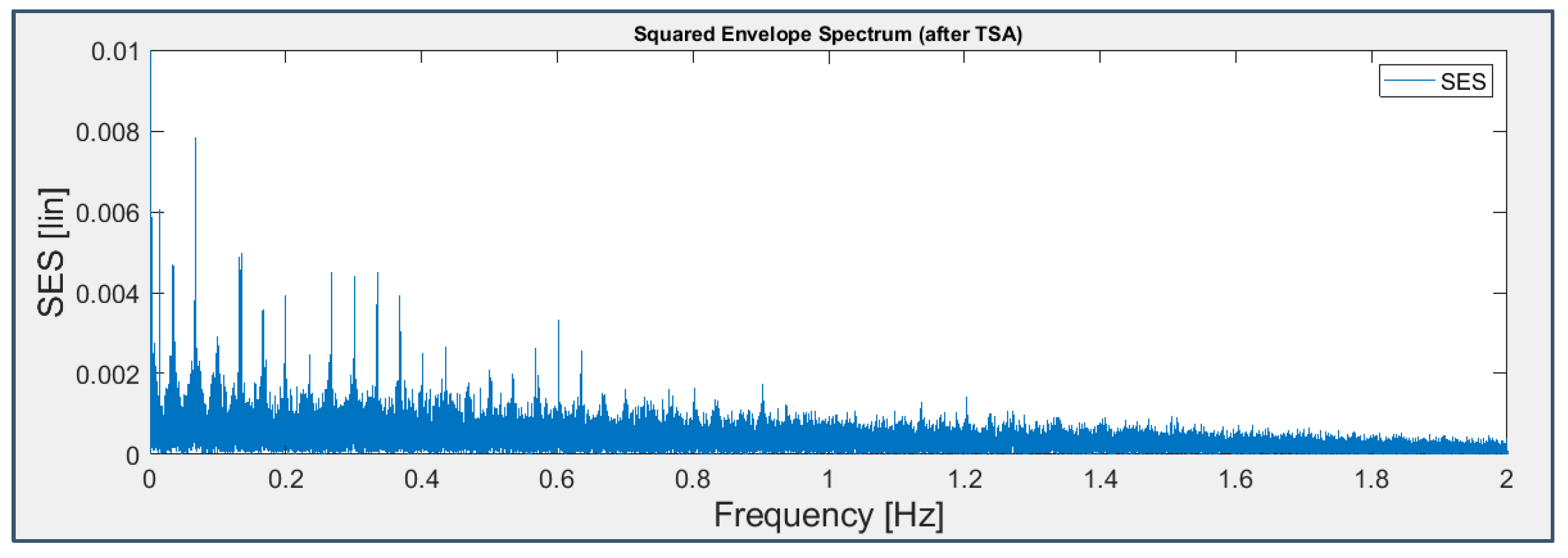
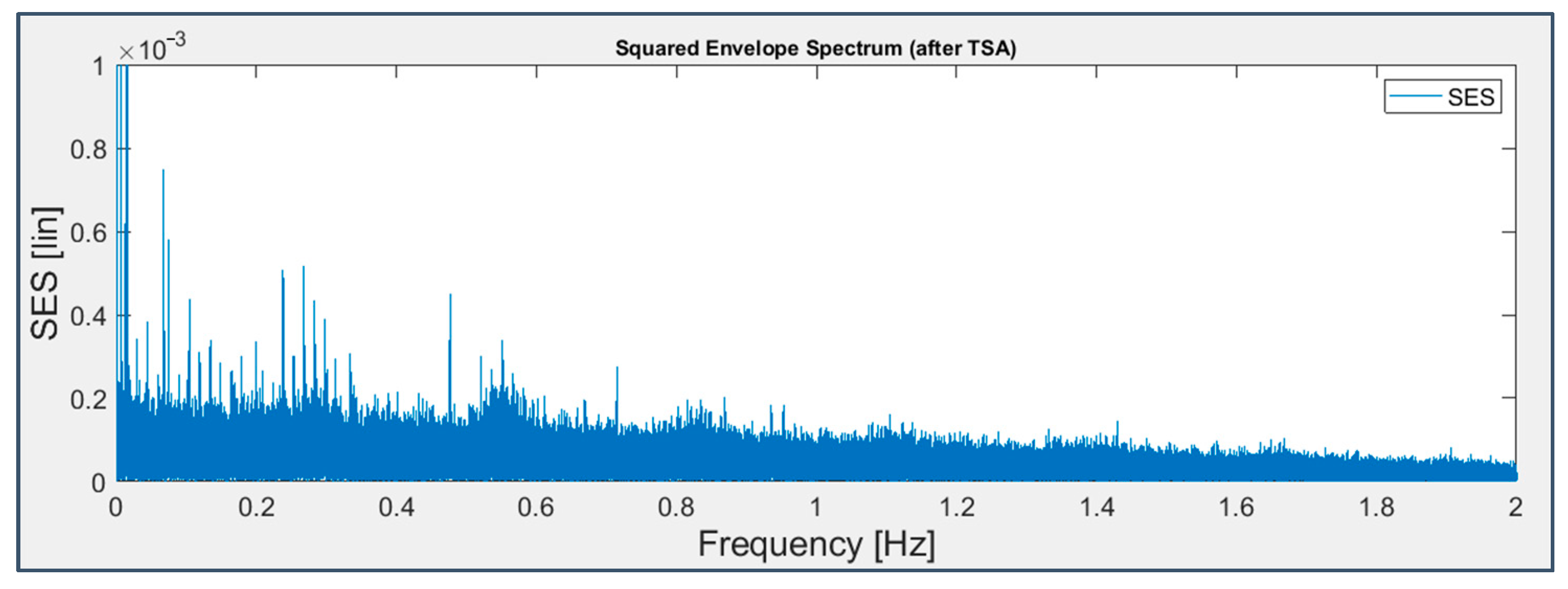
- TSA + SES. Advantages and disadvantages: exactly the same of SES alone.
- ALP + SES. Advantages and disadvantages: the same of SES alone, with a reduction in part of the background noise.
- Daubechies’ Wavelets + SES. Advantages and disadvantages: the same of SES alone, with a little reduction in noise and masking components.
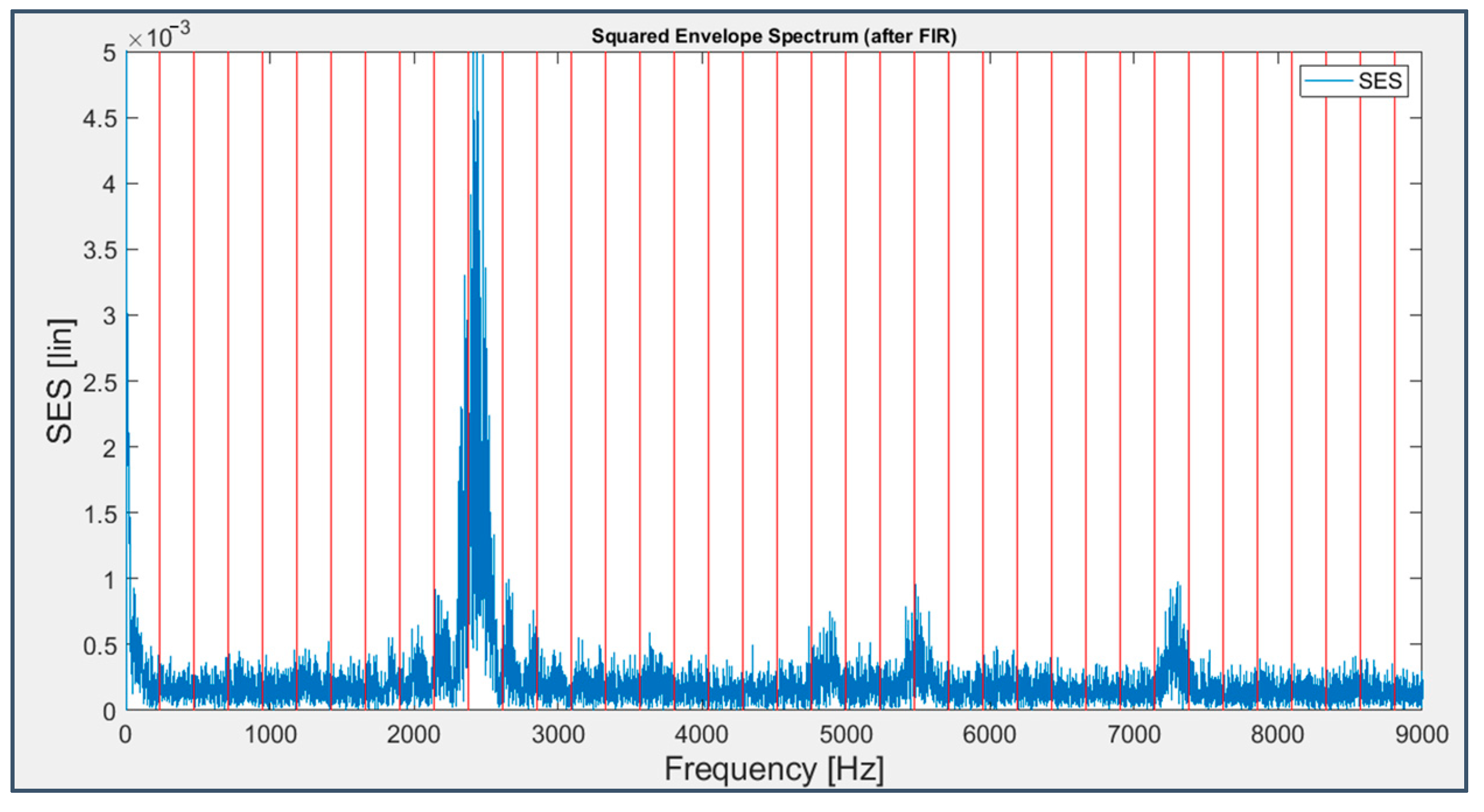
- FIR filter + SES. Advantages and disadvantages: exactly the same of SES alone.
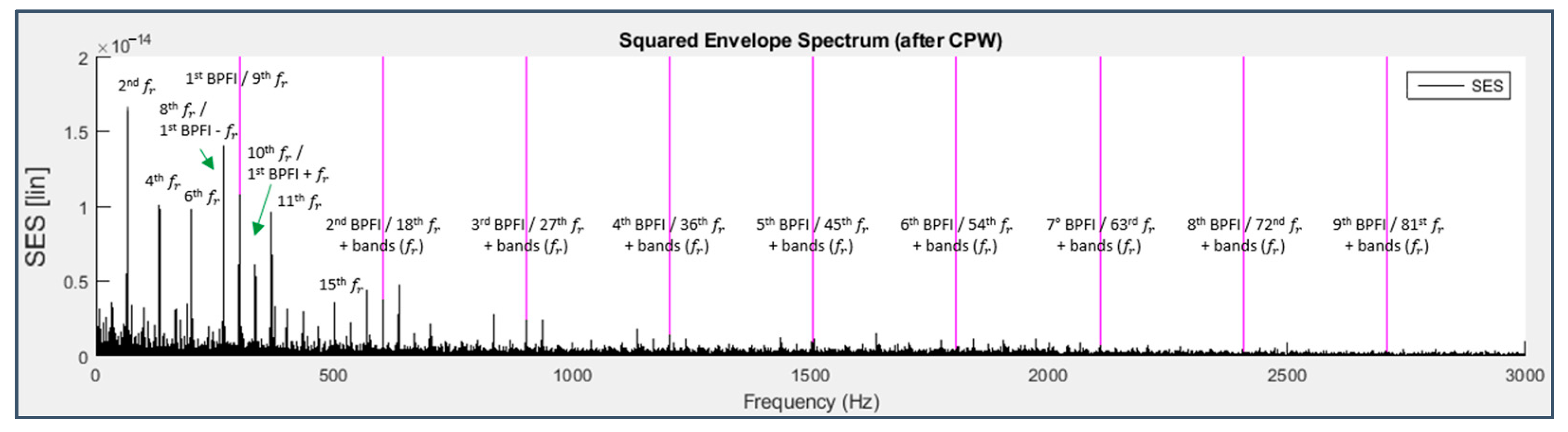
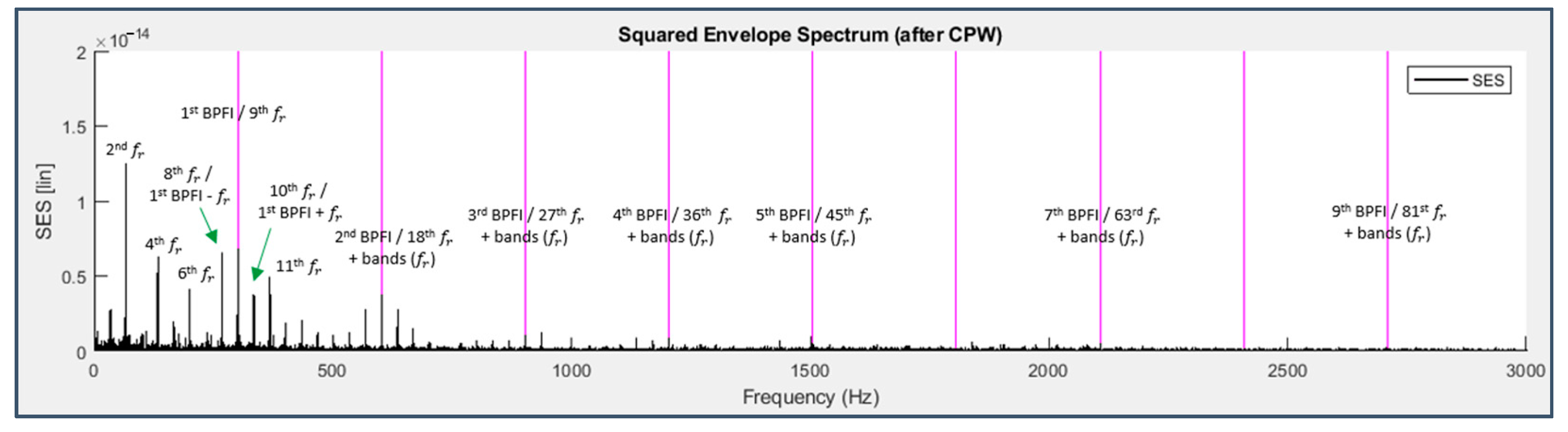
- CPW + SES. Advantages: able to detect the harmonics of the shaft rotation frequency and BPFI for bearing 3 and of the BPFO and BSF for bearing 4 with very low noise. Disadvantages: reduced amplitude of the response peaks.
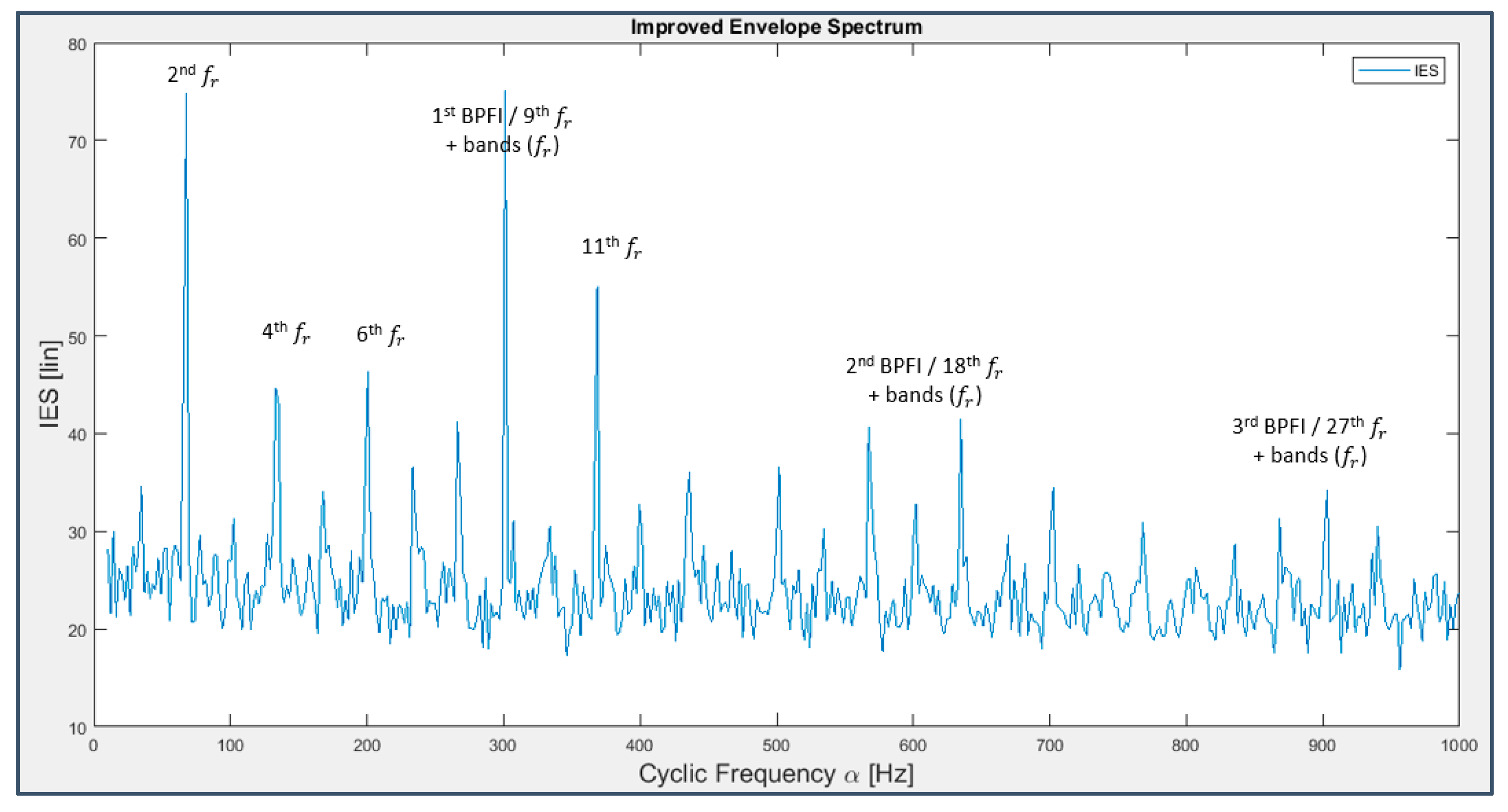
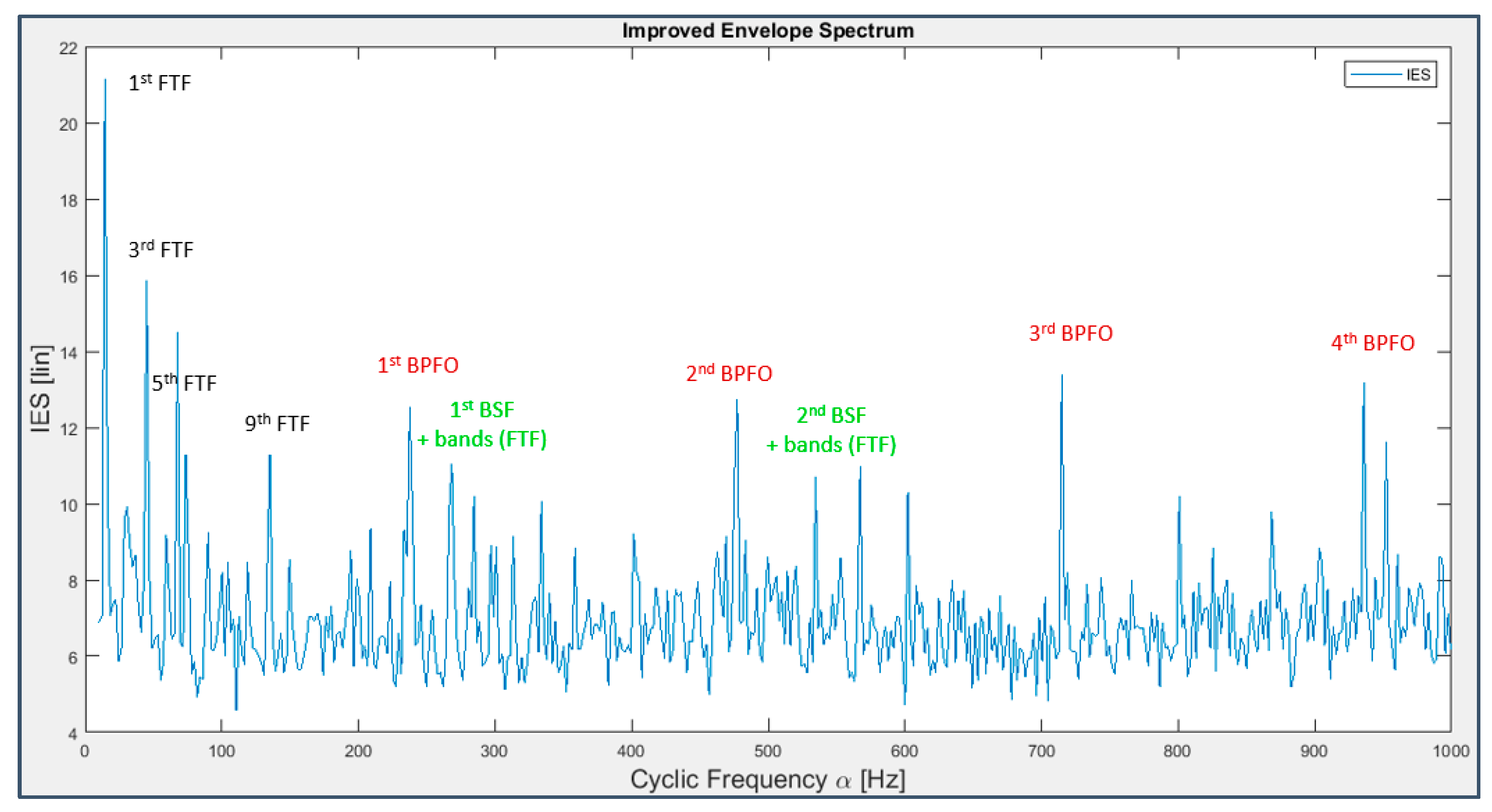
- IES. Advantages: able to detect the harmonics of the shaft rotation frequency and BPFI for bearing 3 and of the BPFO and BSF for bearing 4 with relatively low noise. Disadvantages: analysis performed on the raw (i.e., not pre-processed) signal.
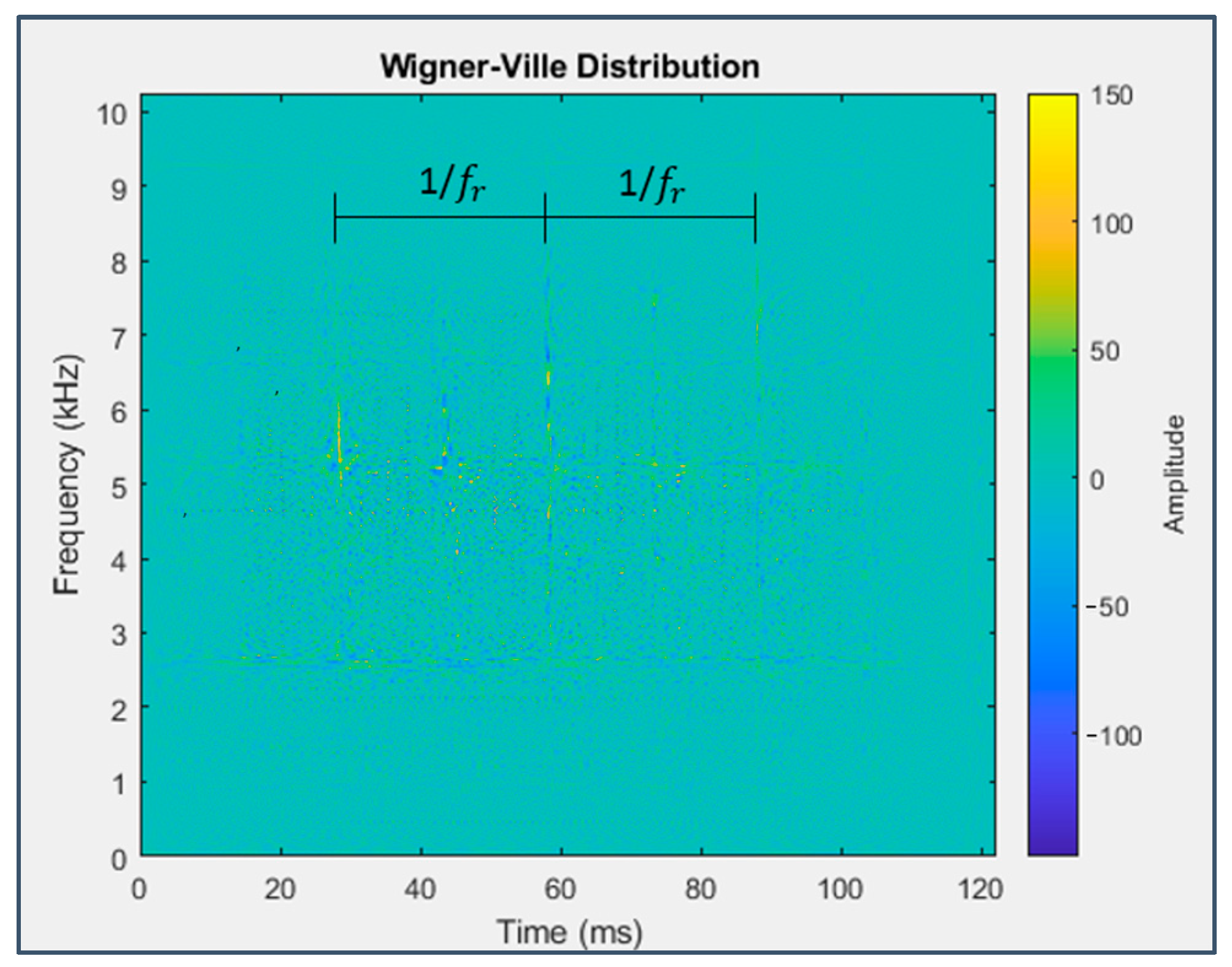
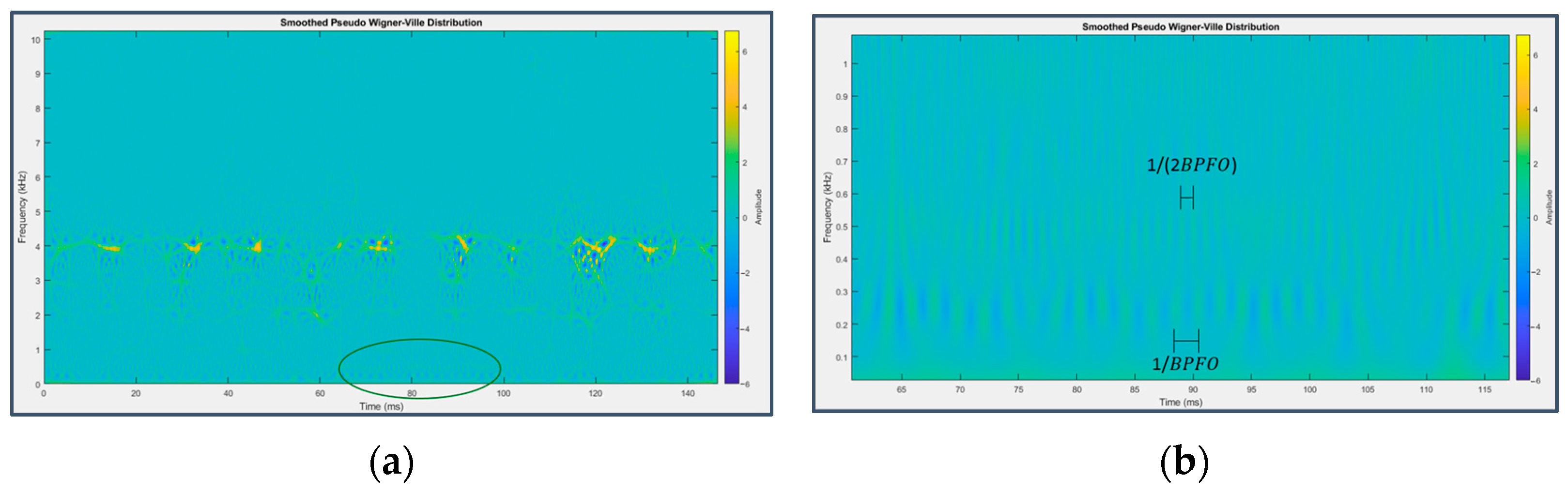
- WVD. Advantages: able to detect some harmonics of the shaft rotation frequency for bearing 3 and of the BPFO for bearing 4. Disadvantages: not able to detect the harmonics of the BPFI for bearing 3 and of the BSF for bearing 4.
3.2.12. Diagnostic Accuracy
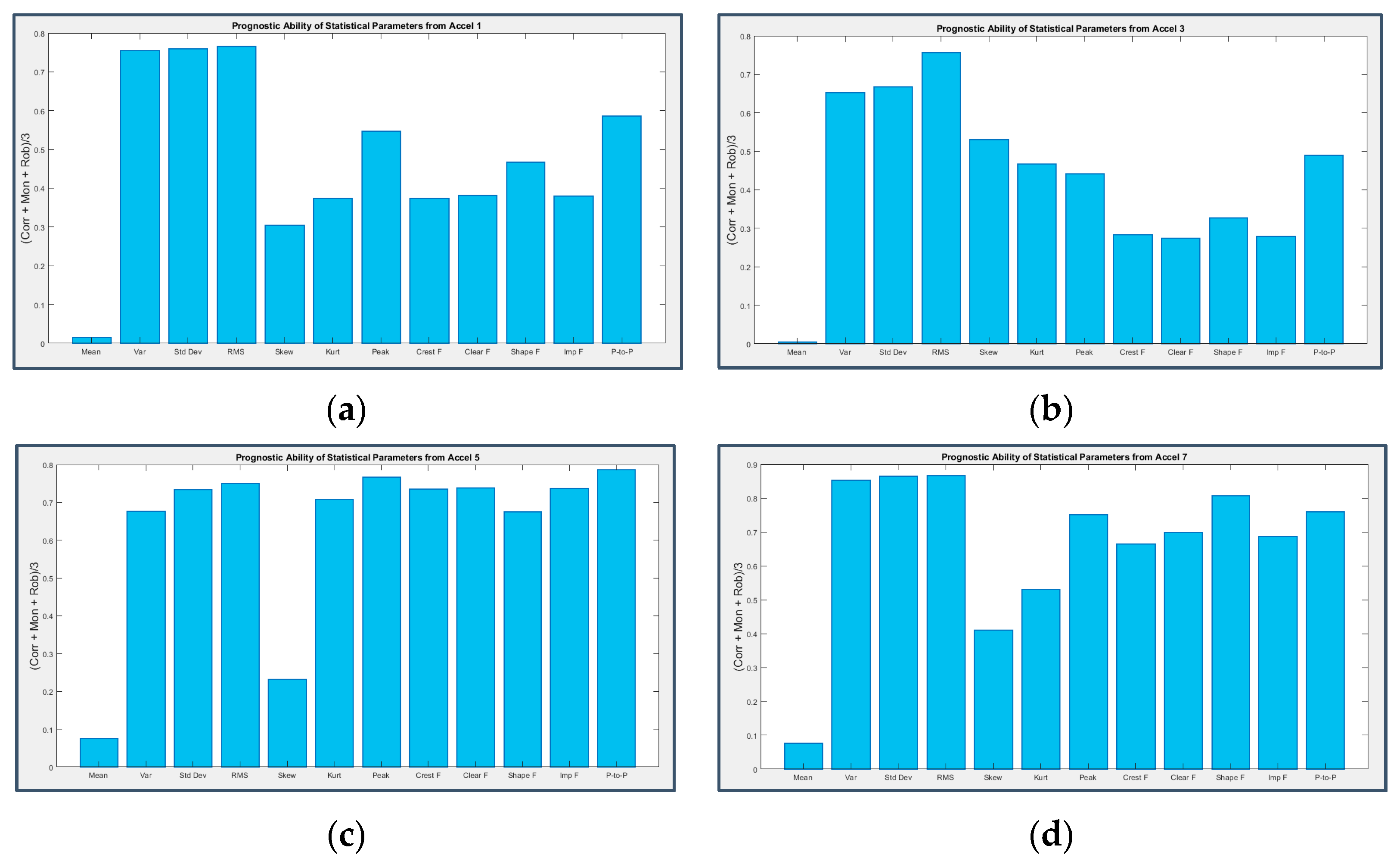
3.3. Fault Prognosis
4. Discussion
- The initial statistical approach allowed the fault detection phase to be executed, bringing to light the occurrence of different faults on bearings 3 and 4, and suggesting the time excerpts of the signal to focus on in the following analyses: in particular, RMS value, Kurtosis and Detectivity were proven to be the most informative statistical parameters.
- Diagnostic techniques, such as STFT, PSD and SES, even individually, provided a fundamental contribution to identifying the exact nature and temporal location of faults throughout the experiment, also taking advantage of the comparison with faultless signals, at the beginning of the test or coming from healthy bearings; it was then possible to confirm the diagnostic report diffused by the IMS Center itself, which attests the presence of:
- -
- A rather late inner race fault on bearing 3, occurring since day 32, which does not show directly but through the excitation of the spectral harmonics of the shaft rotation frequency; the latter also has modulation effects on the BPFI (even though the interpretation of this fault as located at multiple frequencies of 301 Hz instead of the nominal 297 Hz is still potentially acceptable);
- -
- An outer race fault on bearing 4, detectable for certain from day 28, due to the emergence of various harmonics of the BPFO, without modulating phenomena;
- -
- A rolling element fault on bearing 4, detectable from day 26, with the appearance of the harmonics of the BSF and modulated by those of the cage rotation (FTF), raised themselves by the fault.
- TSA, ALP and Daubechies’ Wavelets did not prove to be sufficiently useful as signal pre-treatment techniques in combination with SES.
- FIR and adaptive filters based on the Kurtogram were not able to select the frequency band dominated by fault signs.
- The CPW technique turned out to be a very powerful and efficient tool to pre-whiten the signal in combination with SES, by removing all the masking components and noise and therefore highlighting the fault signatures.
- The second-order cyclostationary techniques, especially IES, which are directly applied on the raw signal, were able to correctly detect the harmonics of the fault frequencies for the defective bearings presenting relatively low noise levels.
- It should be underlined that CPW and IES, which were found to be the most useful techniques, were used for the first time in the present work for the diagnostics of the IMS rolling bearing dataset.
- The brief insight made into the prognosis domain, to quantify the suitability of statistical parameters to make predictions on the signal future trends, represents an interesting starting point that may be worthy of being further developed.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Randall, R.B. Vibration-Based Condition Monitoring: Industrial, Aerospace and Automotive Applications, 1st ed.; John Wiley & Sons, Ltd.: Chichester, UK, 2011. [Google Scholar]
- Andhare, A. Condition Monitoring of Rolling Element Bearings: Vibration Analysis and Diagnostics of Tapered Roller Bearings, Using Time and Frequency Domain Methods, 1st ed.; Lambert Academic Publishing: London, UK, 2010. [Google Scholar]
- Randall, R.B.; Antoni, J. Rolling element bearing diagnostics—A tutorial. Mech. Syst. Signal Process. 2011, 25, 485–520. [Google Scholar] [CrossRef]
- Tiboni, M.; Remino, C.; Bussola, R.; Amici, C. A Review on Vibration-Based Condition Monitoring of Rotating Machinery. Appl. Sci. 2022, 12, 972. [Google Scholar] [CrossRef]
- Sawalhi, N.; Ganeriwala, S. Analysis and Signal Processing of a Gearbox Vibration Signal with a Defective Rolling Element Bearing. Appl. Cond. Monit. 2016, 4, 71–85. [Google Scholar]
- Pennacchi, P.; Chatterton, S.; Vania, A. Diagnostics of Roller Bearings Faults During Long-Lasting Tests. In Advances in Italian Mechanism Science. IFToMM ITALY 2020. Mechanisms and Machine Science; Springer: Cham, Switzerland, 2021; pp. 687–698. [Google Scholar] [CrossRef]
- Malla, C.; Panigrahi, I. Review of Condition Monitoring of Rolling Element Bearing Using Vibration Analysis and Other Techniques. J. Vib. Eng. Tech. 2018, 7, 407–414. [Google Scholar] [CrossRef]
- Zhu, K.; Yue, X.; Sun, D.; Xiao, S.; Hu, X. Rolling Bearing Fault Feature Extraction Using Local Maximum Synchro-squeezing Transform and Global Fuzzy Entropy. Int. J. Acoust. Vib. 2022, 27, 37–44. [Google Scholar] [CrossRef]
- Senapaty, G.; Rao, S. Vibration based condition monitoring of rotating machinery. MATEC Web Conf. 2018, 144, 01021. [Google Scholar] [CrossRef]
- Golafshan, R.; Jacobs, G.; Berroth, J. Investigation of Rolling Bearing Condition Monitoring Techniques Based on Long Term Run-to-Failure Vibration Data. Bear. J. Vol. 2018, 3, 107–118. [Google Scholar] [CrossRef]
- Moshrefzadeh, A. Condition monitoring and intelligent diagnosis of rolling element bearings under constant/variable load and speed conditions. Mech. Syst. Signal Process. 2021, 149, 107–153. [Google Scholar] [CrossRef]
- Borghesani, P.; Shahriar, R. Cyclostationary analysis with logarithmic variance stabilization. Mech. Syst. Signal Process. 2016, 70–71, 51–72. [Google Scholar] [CrossRef]
- Gousseau, W.; Antoni, J.; Girardin, F.; Griffaton, J. Analysis of the Rolling Element Bearing Data Set of the Center for Intelligent Maintenance Systems of the University of Cincinnati. CM2016; HAL Open Science: Charenton, France, 2016; Available online: https://hal.science/hal-01715193 (accessed on 10 January 2023).
- Qiu, H.; Lee, J.; Lin, J. Wavelet filter-based weak signature detection method and its application on rolling element bearing prognostics. J. Sound Vib. 2006, 289, 1066–1090. [Google Scholar] [CrossRef]
- Zhichao, W.; Hong, X.; Shaomin, Z.; Bo, Y.; Binsen, P.; Jiyu, Z.; Yingying, J. Research on fault diagnosis method of rotating machinery based on EWT-Threshold denoising and teager energy spectrum. In Proceedings of the 30th European Safety and Reliability Conference and the 15th Probabilistic Safety Assessment and Management Conference, Venice, Italy, 1–5 November 2020. [Google Scholar]
- Cavalaglio Camargo Molano, J.; Strozzi, M.; Rubini, R.; Cocconcelli, M. Analysis of NASA bearing dataset of the University of Cincinnati by means of Hjorth’s parameters. In Proceedings of the International Conference on Structural Engineering Dynamics ICEDyn 2019, Viana do Castelo, Portugal, 24–26 June 2019; Available online: https://hdl.handle.net/11380/1203704 (accessed on 10 January 2023).
- Jiyu, Z.; Hong, X.; Zhichao, W. Research on identification method of bearing performance degradation in NPP Based on GG clustering. In Proceedings of the 30th European Safety and Reliability Conference and the 15th Probabilistic Safety Assessment and Management Conference, Venice, Italy, 1–5 November 2020. [Google Scholar]
- Mortada, M.-A.; Yacout, S.; Lakis, A. Diagnosis of rotor bearings using logical analysis of data. J. Qual. Maint. Eng. 2011, 17, 371–397. [Google Scholar] [CrossRef]
- Hosseinpour, F.; Behzad, M.; Zio, E. Model-based prognostic of the remaining useful life of bearings considering model parameter uncertainty. In Proceedings of the 30th European Safety and Reliability Conference and the 15th Probabilistic Safety Assessment and Management Conference, Venice, Italy, 1–5 November 2020. [Google Scholar]
- Sim, J.; Kim, S.; Park, H.J.; Choi, J.-H. A Tutorial for feature engineering in the prognostics and health management of gears and bearings. Appl. Sci. 2020, 10, 5639. [Google Scholar] [CrossRef]
- Wang, J.; Wang, D.; Wang, S.; Li, W.; Song, K. Fault Diagnosis of Bearings Based on Multi-Sensor Information Fusion and 2D Convolutional Neural Network. IEEE Access 2021, 9, 23717–23725. [Google Scholar] [CrossRef]
- Eren, L.; Ince, T.; Kiranyaz, S. A Generic Intelligent Bearing Fault Diagnosis System Using Compact Adaptive 1D CNN Classifier. J. Signal Process. Syst. 2019, 91, 179–189. [Google Scholar] [CrossRef]
- Tobon-Mejia, D.A.; Medjaher, K.; Zerhouni, N.; Tripot, G. A data-driven failure prognostics method based on mixture of Gaussian hidden Markov models. IEEE Trans. Reliab. 2012, 61, 491–503. [Google Scholar] [CrossRef]
- Jianbo, Y. Health condition monitoring of machines based on hidden Markov model and contribution analysis. IEEE Trans. Instrum. Meas. 2012, 61, 2200–2211. [Google Scholar]
- Tobon-Mejia, D.A.; Medjaher, K.; Zerhouni, N.; Tripot, G. Hidden Markov Models for failure diagnostic and prognostic. In Proceedings of the Prognostics and System Health Management Conference (PHM-Shenzhen), Shenzhen, China, 24–25 May 2011; pp. 1–8. [Google Scholar]
- Tobon-Mejia, D.A.; Medjaher, K.; Zerhouni, N.; Tripot, G. A Mixture of Gaussians hidden Markov Model for failure diagnostic and prognostic. In Proceedings of the 6th Annual IEEE Conference on Automation Science and Engineering, CASE’10, Toronto, ON, Canada, 21–24 August 2010; pp. 338–343. [Google Scholar]
- Peng, Y.; Liu, Y.; Cheng, J.; Yang, Y.; He, K.; Wang, G.; Liu, Y. Remaining useful life prediction of rolling bearing using adaptive sparsest narrow-band decomposition and locality preserving projections. Adv. Mech. Eng. 2019, 11, 1–13. [Google Scholar] [CrossRef]
- Jianbo, Y. Local and nonlocal preserving projection for bearing defect classification and performance assessment. IEEE Trans. Ind. Electron. 2012, 59, 2363–2376. [Google Scholar]
- Eker, O.F.; Camci, F.; Jennions, I.K. Major challenges in prognostics: Study on benchmarking prognostics datasets. In Proceedings of the European Conference of Prognostics and Health Management Society, Dresden, Germany, 3–5 July 2012. [Google Scholar]
- Porotsky, S.; Bluvband, Z. Remaining useful life estimation for systems with non-trendability behaviour. In Proceedings of the 2012 IEEE Conference on Prognostics and Health Management, Denver, CO, USA, 18–21 June 2012; pp. 1–6. [Google Scholar]
- Yacout, S. Logical analysis of maintenance and performance data of physical assets. In Proceedings of the 2012 Proceedings Annual Reliability and Maintainability Symposium, Reno, NV, USA, 23–26 January 2012; pp. 1–6. [Google Scholar]
- Wang, F.; Zhang, Y.; Zhang, B.; Su, W. Application of Wavelet Packet Sample Entropy in the Forecast of Rolling Element Bearing Fault Trend. In Proceedings of the International Conference on Multimedia and Signal Processing (CMSP 2011), Guilin, China, 14–15 May 2011; pp. 12–16. [Google Scholar]
- Rolling Element Bearing Datasets. Center for Intelligent Maintenance Systems (IMS), University of Cincinnati, Ohio, USA. 2014. Available online: https://www.kaggle.com/datasets/vinayak123tyagi/bearing-dataset (accessed on 10 January 2023).
- MATLAB. MATLAB Documentation and Online Guide, 1994–2022; The MathWorks, Inc©: Natick, MA, USA, 2021. [Google Scholar]
- Vidaurre, C.; Krämer, N.; Blankertz, B.; Schlögl, A. Time Domain Parameters as a feature for EEG-based Brain–Computer Interfaces. Neural. Netw. 2009, 22, 1313–1319. [Google Scholar] [CrossRef]
- Salgado Patrón, J.; Barrera, C. Robotic arm controlled by a hybrid brain computer interface. ARPN J. Eng. Appl. Sci. 2016, 11, 7313–7321. [Google Scholar]
- Cocconcelli, M.; Strozzi, M.; Molano, J.C.C.; Rubini, R. Detectivity: A combination of Hjorth’s parameters for condition monitoring of ball bearings. Mech. Syst. Signal Process. 2022, 164, 108247. [Google Scholar] [CrossRef]
- Antoni, J. Cyclic spectral analysis in practice. Mech. Syst. Signal Process. 2007, 21, 597–630. [Google Scholar] [CrossRef]
- Peeters, C.; Helsen, J.; Guillaume, P. Signal pre-processing using cepstral editing for vibration-based bearing fault detection. In Proceedings of the International Conference on Noise and Vibration Engineering (ISMA), Leuven, Belgium, 19–21 September 2016. [Google Scholar]
- Borghesani, P.; Pennacchi, P.; Randall, R.B.; Sawalhi, N.; Ricci, R. Application of cepstrum pre-whitening for the diagnosis of bearing faults under variable speed conditions. Mech. Syst. Signal Process. 2013, 36, 370–384. [Google Scholar] [CrossRef]


















































| Start-stop time and date | From 22 October 2003 at 12:06:24 p.m. To 25 November 2003 at 11:39:56 p.m. |
| Entire experiment timespan | 49,680 min (34 days and 12 h) |
| Effective data acquisition duration | 36 min |
| Number of files | 2156 |
| Number of channels (accelerometers) | 8 |
| Channel arrangement | Bearing 1: channels 1 and 2 Bearing 2: channels 3 and 4 Bearing 3: channels 5 and 6 Bearing 4: channels 7 and 8 |
| File recording interval | 10 min (5 min for the first 43 files) |
| Location of detected faults at the end of the experiment | Bearing 3: inner race Bearing 4: rolling element and outer race |
| Nominal rotation frequency of the shaft | 33.3 Hz |
| Ball Pass Frequency Outer Race (BPFO) | 236 Hz |
| Ball Pass Frequency Inner Race (BPFI) | 297 Hz |
| Ball Spin Frequency (BSF) | 278 Hz (2 × 139 Hz) |
| Fundamental Train Frequency (FTF) | 15 Hz |
| Parameter | Abbrev. | Formula |
|---|---|---|
| Mean | Mean | |
| Variance | Var | |
| Standard Deviation | STD | |
| Root Mean Squared Value | RMS | |
| Skewness | Skew | |
| Kurtosis | Kurt | |
| Peak | Peak | |
| Crest Factor | CF | |
| Clearance Factor | CL | |
| Shape Factor | SF | |
| Impulse Factor | IF | |
| Peak-to-Peak | P2P |
| Technique | Bearing | Kurtosis |
|---|---|---|
| PSD | 3 | 46.3 (Figure 20) |
| 4 | 41.1 (Figure 22) | |
| SES | 3 | 22.7 (Figure 24) |
| 4 | 17.5 (Figure 25) | |
| TSA + SES | 3 | 23.0 (Figure 26) |
| 4 | 17.8 (Figure 27) | |
| ALP + SES | 3 | 24.2 (Figure 28) |
| 4 | 18.2 (Figure 29) | |
| Wavelets + SES | 3 | 22.9 (Figure 30) |
| 4 | 17.5 (Figure 31) | |
| FIR Filter + SES | 3 | 51.2 (Figure 34) |
| 4 | 38.6 (Figure 36) | |
| CPW + SES | 3 | 86.0 (Figure 38) |
| 4 | 81.7 (Figure 40) | |
| IES | 3 | 65.7 (Figure 45) |
| 4 | 58.6 (Figure 46) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sacerdoti, D.; Strozzi, M.; Secchi, C. A Comparison of Signal Analysis Techniques for the Diagnostics of the IMS Rolling Element Bearing Dataset. Appl. Sci. 2023, 13, 5977. https://doi.org/10.3390/app13105977
Sacerdoti D, Strozzi M, Secchi C. A Comparison of Signal Analysis Techniques for the Diagnostics of the IMS Rolling Element Bearing Dataset. Applied Sciences. 2023; 13(10):5977. https://doi.org/10.3390/app13105977
Chicago/Turabian StyleSacerdoti, Diletta, Matteo Strozzi, and Cristian Secchi. 2023. "A Comparison of Signal Analysis Techniques for the Diagnostics of the IMS Rolling Element Bearing Dataset" Applied Sciences 13, no. 10: 5977. https://doi.org/10.3390/app13105977
APA StyleSacerdoti, D., Strozzi, M., & Secchi, C. (2023). A Comparison of Signal Analysis Techniques for the Diagnostics of the IMS Rolling Element Bearing Dataset. Applied Sciences, 13(10), 5977. https://doi.org/10.3390/app13105977