
Control of Flexible Robot by Harmonic Functions


Abstract
:1. Introduction
2. Materials and Methods
2.1. Exact Input–Output Linearization with Parametrization
2.2. Invariant Control
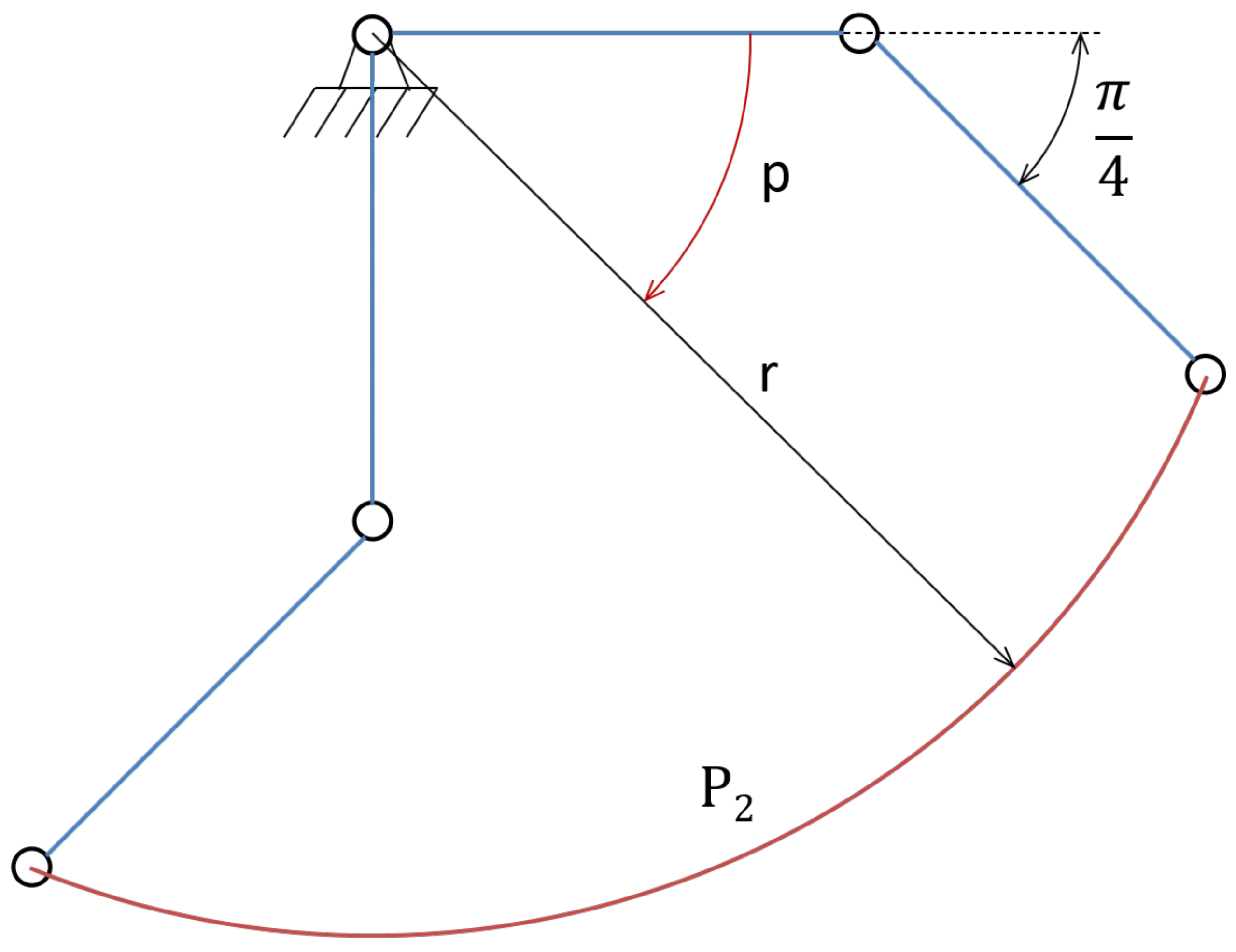
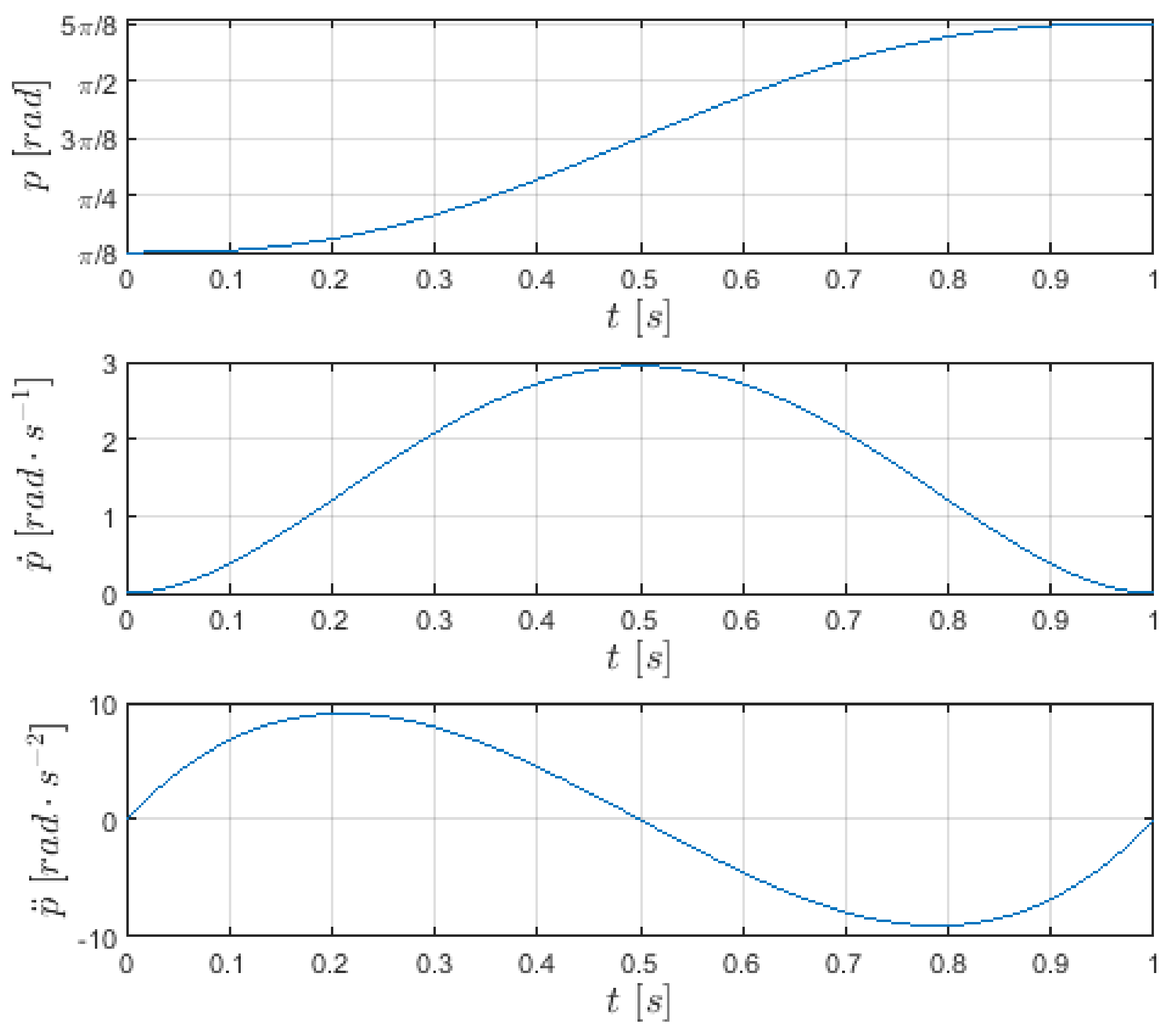
2.3. Natural Motion
3. Results
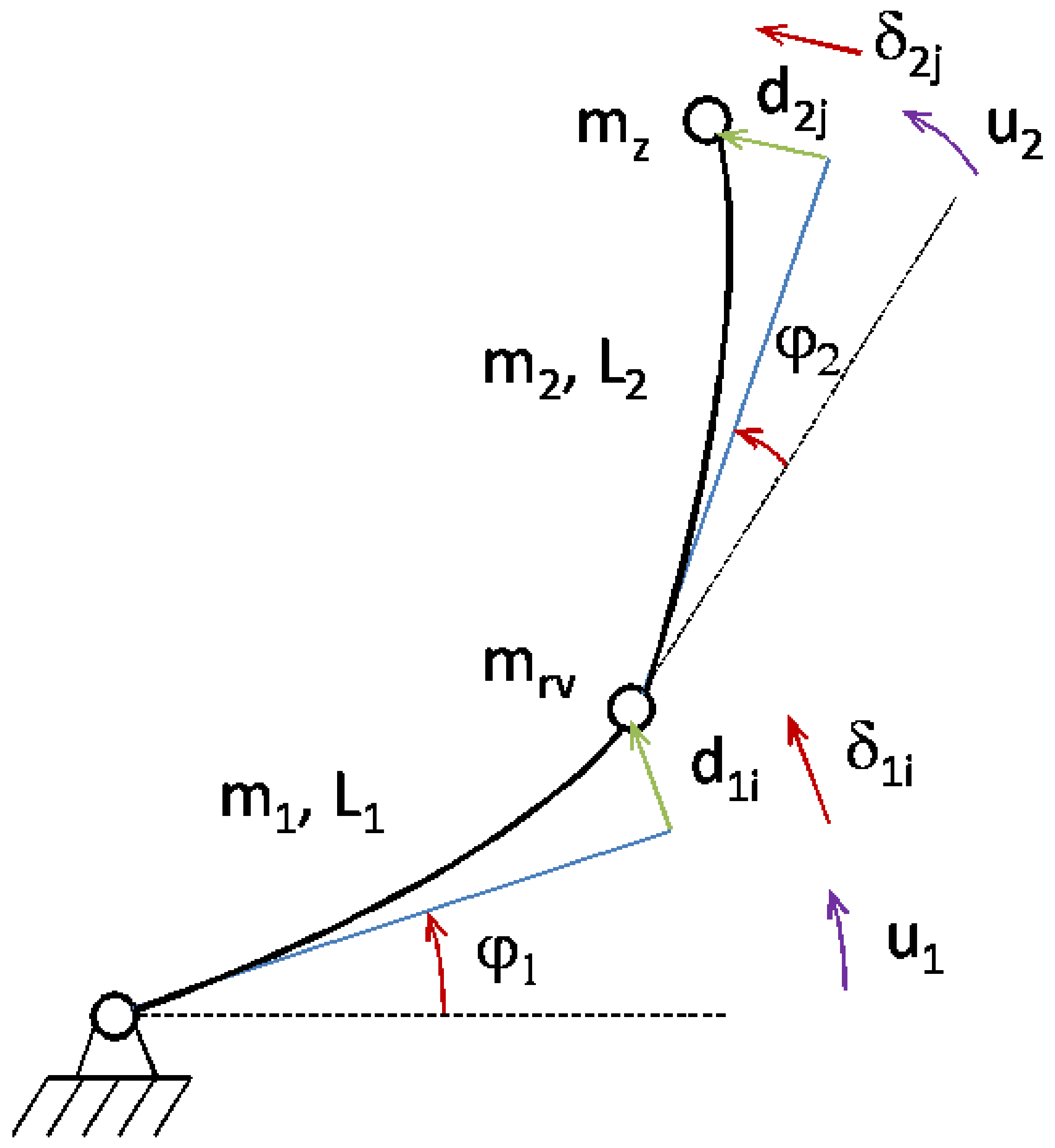
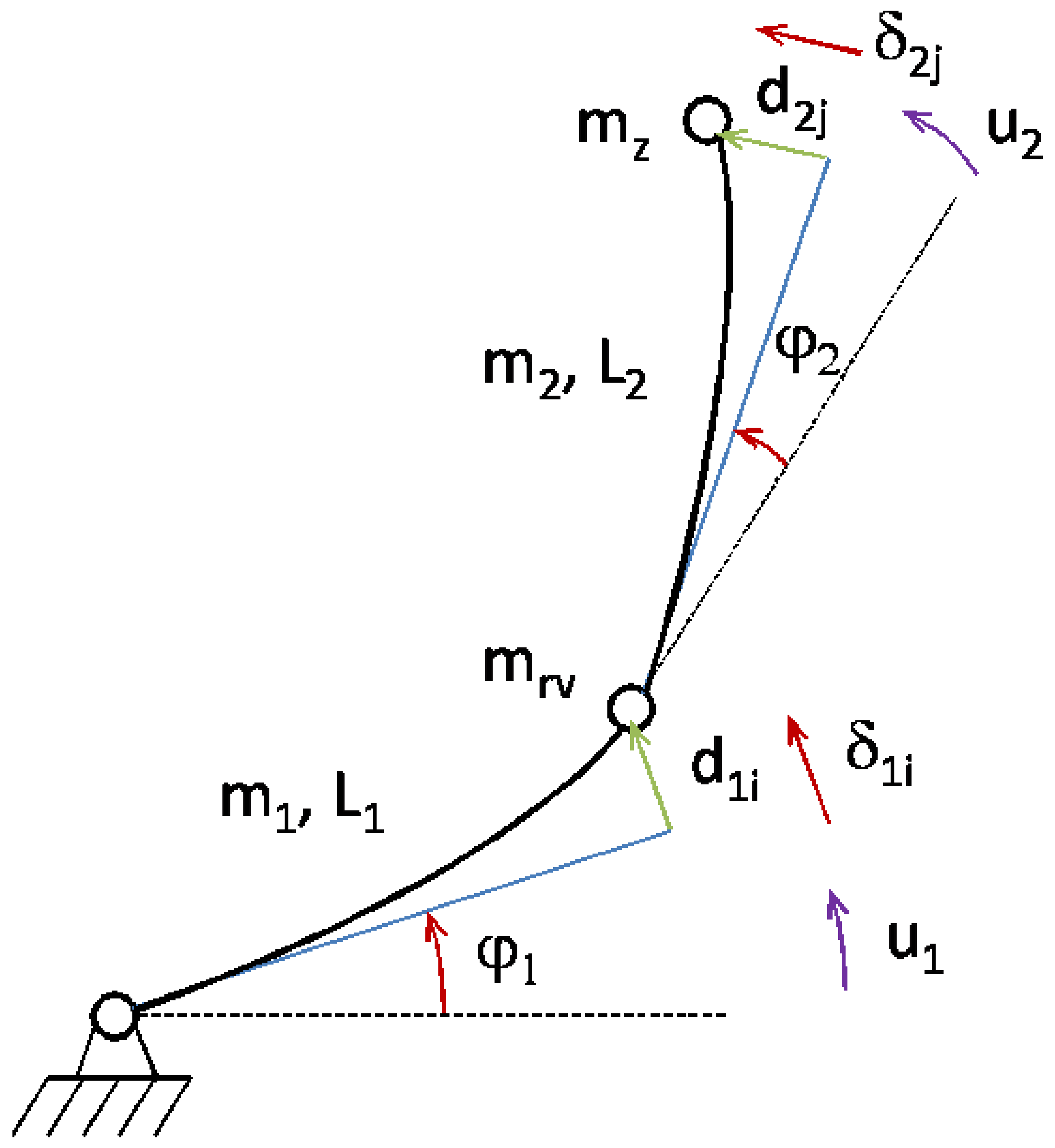
3.1. Model of Flexible Robot
3.2. Input–Output Linearization with Output Parametrization
3.3. Control of Flexible Robot
3.3.1. Natural Motion Frequencies
3.3.2. Invariant Control Parameters
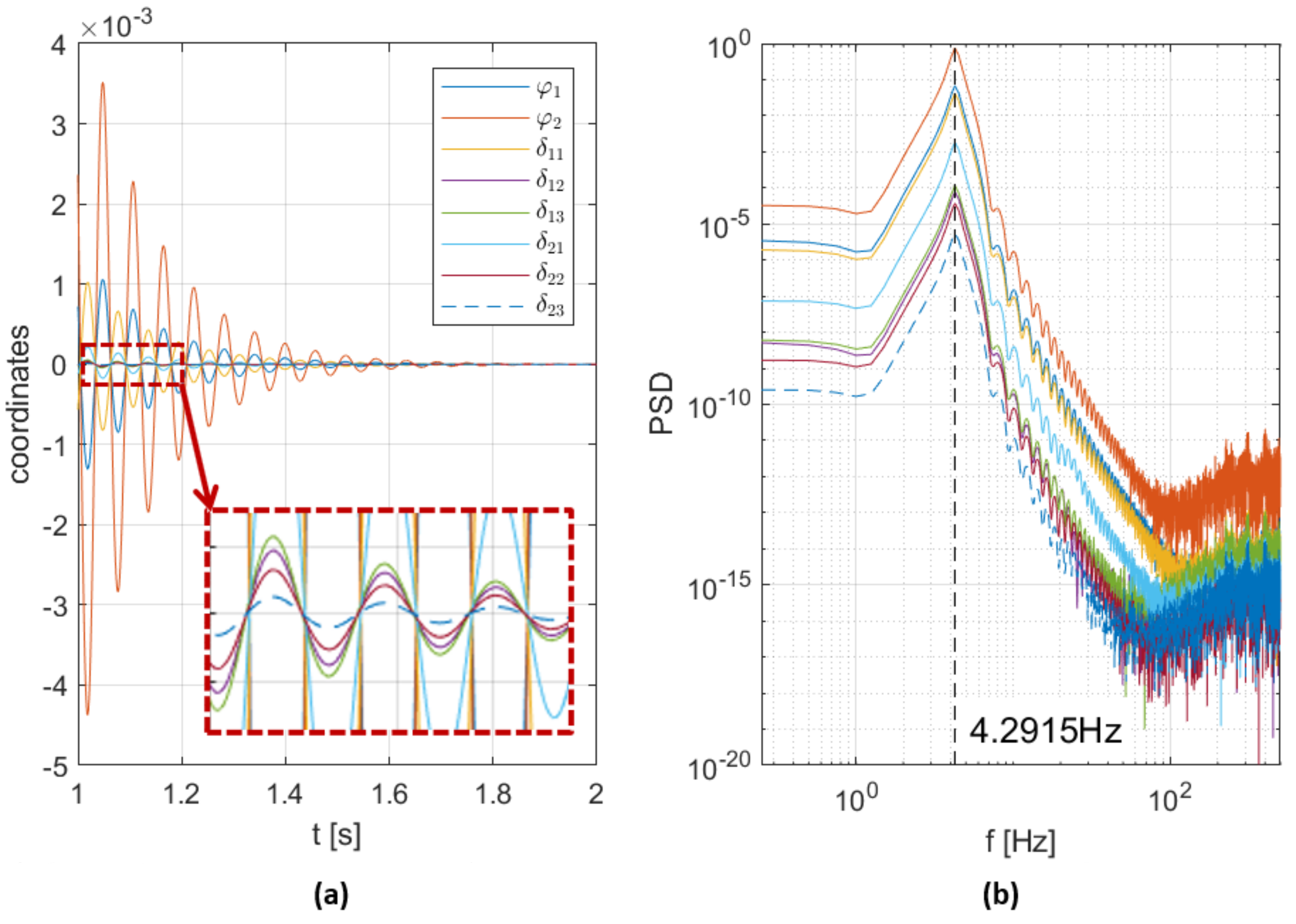
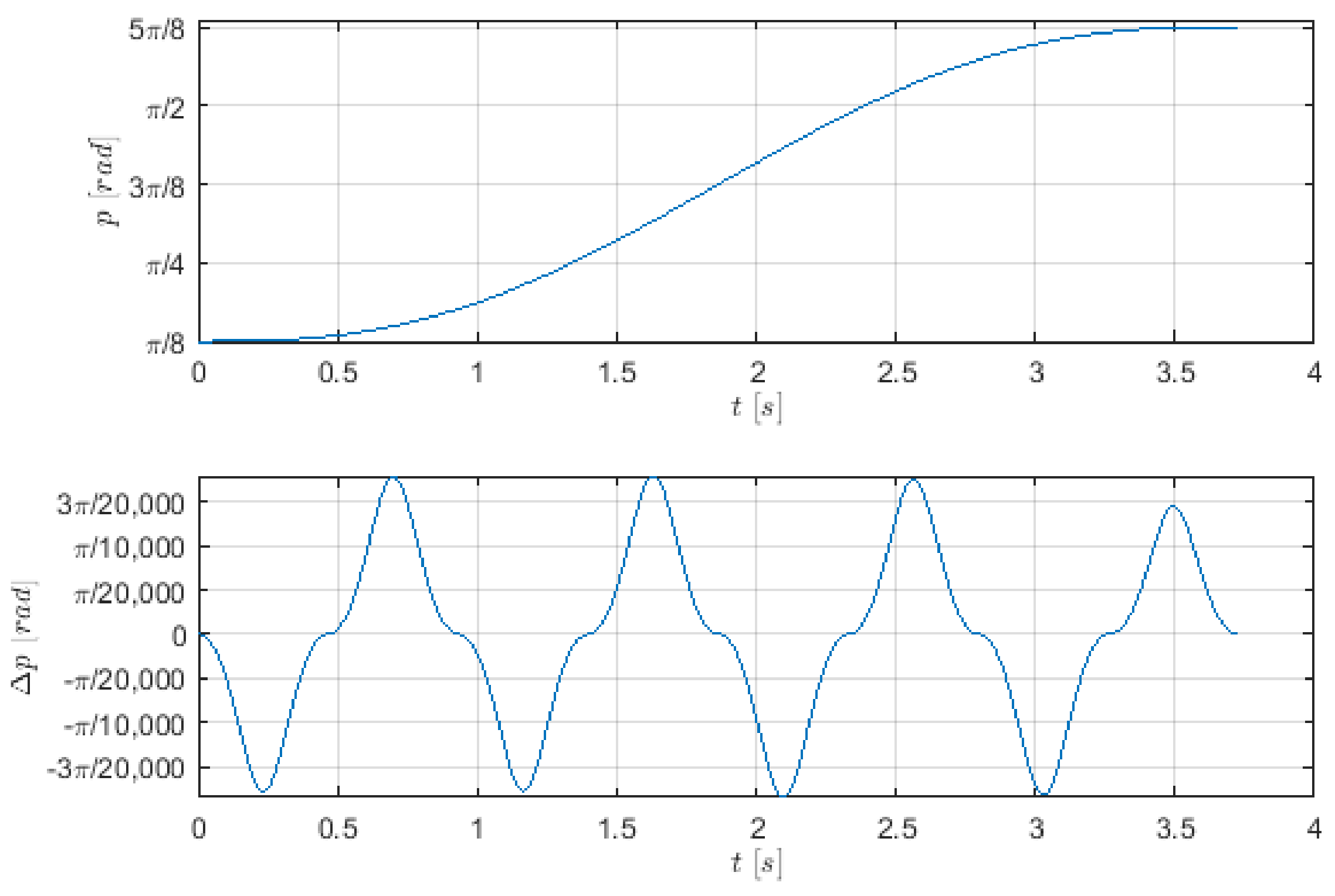
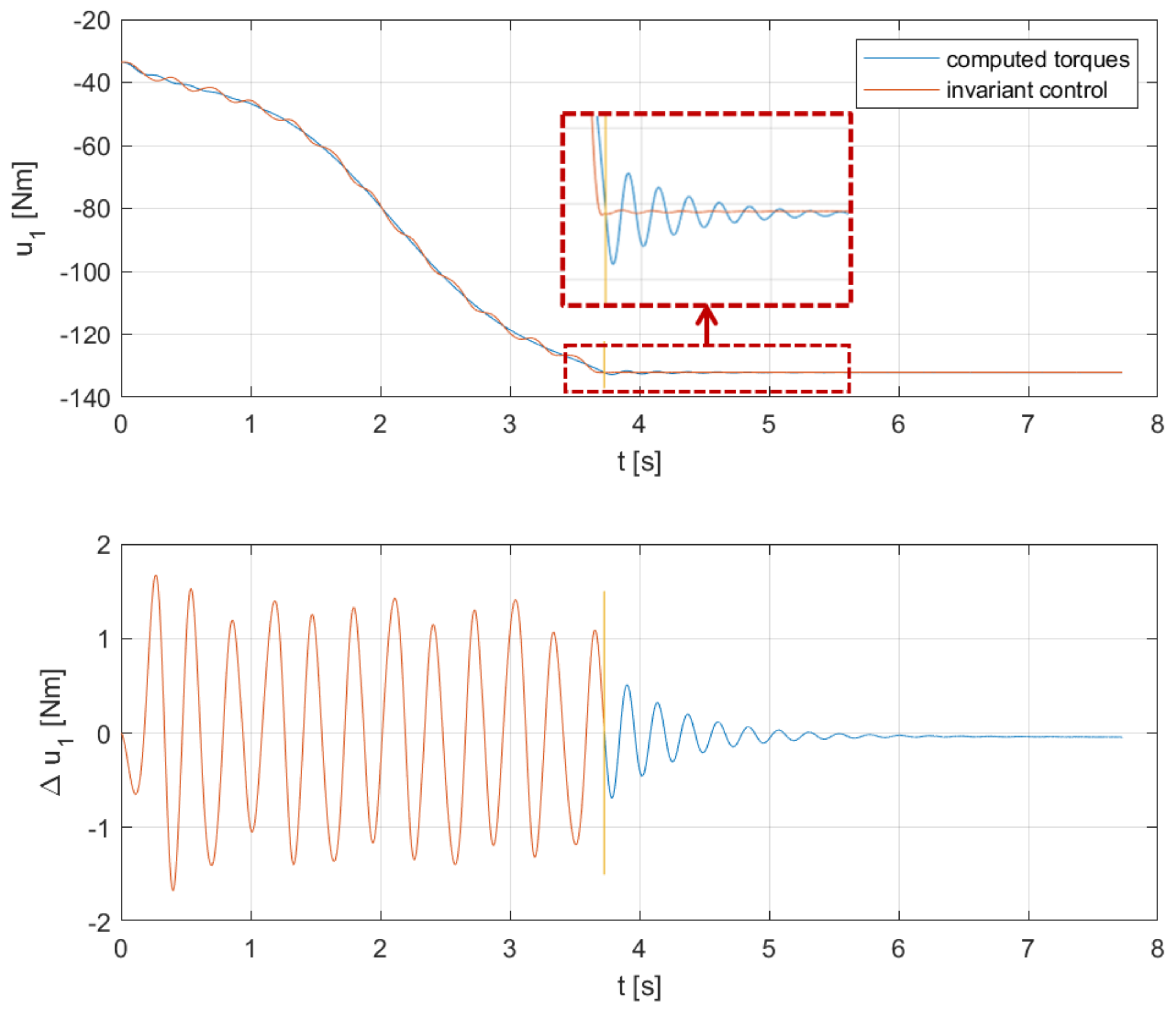
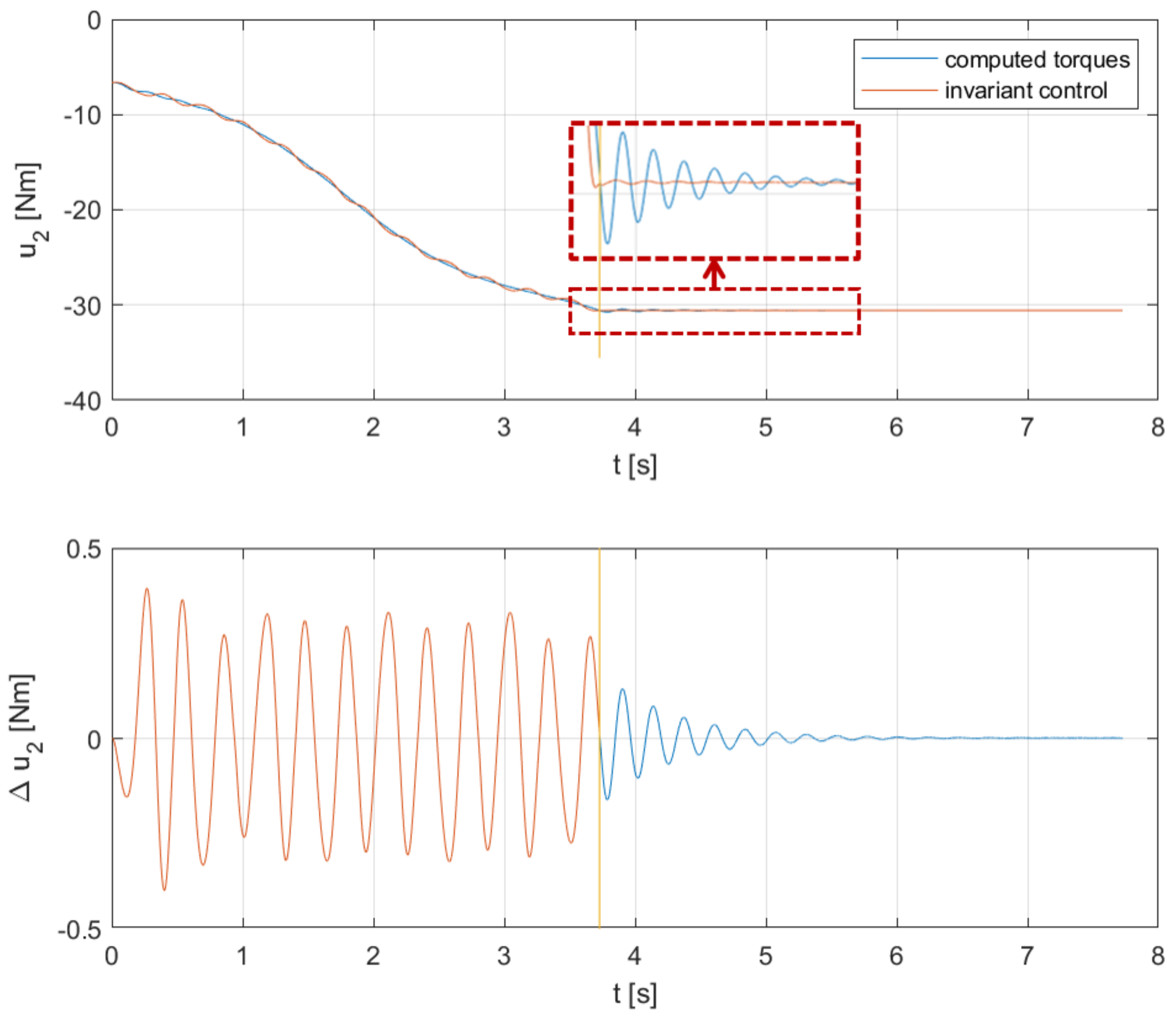
3.4. Simulation
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Valášek, M. Design and control of under-actuated and over-actuated mechanical systems—Challenges of mechanics and mechatronics. Suppl. Veh. Syst. Dyn. 2002, 40, 37–50. [Google Scholar]
- Valášek, M. Control of elastic industrial robots by nonlinear dynamic compensation. Acta Polytech. 1993, 33, 15–30. [Google Scholar]
- Neusser, Z.; Valášek, M. Control of the underactuated mechanical systems by harmonics. In Proceedings of the ECCOMAS Thematic Conference on Multibody Dynamics, Zagreb, Croatia, 1–4 July 2013; pp. 329–339. [Google Scholar]
- Burghardt, A.; Szuster, M. Neuro-Dynamic Programming in Control of the Ball and Beam System. In Solid State Phenomena; Mechatronic Systems, Mechanics and Materials II; Trans Tech Publications, Ltd.: Freienbach, Switzerland, 2014; Volume 210, pp. 206–214. [Google Scholar] [CrossRef]
- Rubí, J.; Rubio, A.; Avello, A. Swing-up control problem for a self-erecting double inverted pendulum. IEE Proc. Control. Theory Appl. 2002, 149, 169–175. [Google Scholar] [CrossRef]
- Liu, D.; Yi, J.; Zhao, D.; Wang, W. Adaptive sliding mode fuzzy control for a two-dimensional overhead crane. Mechatronics 2005, 15, 505–522. [Google Scholar] [CrossRef]
- Liu, Z.; Yang, T.; Sun, N.; Fang, Y. An Antiswing Trajectory Planning Method with State Constraints for 4-DOF Tower Cranes: Design and Experiments. IEEE Access 2019, 7, 62142–62151. [Google Scholar] [CrossRef]
- Kim, J.; Kiss, B.; Kim, D.; Lee, D. Tracking Control of Overhead Crane Using Output Feedback with Adaptive Unscented Kalman Filter and Condition-Based Selective Scaling. IEEE Access 2021, 9, 108628–108639. [Google Scholar] [CrossRef]
- Udawatta, L.; Watanabe, K.; Izumi, K.; Kiguchi, K. Control of underactuated robot manipulators using switching computed torque method: GA based approach. Soft Comput. 2003, 8, 51–60. [Google Scholar] [CrossRef]
- Fantoni, I.; Lozano, R. Non-linear Control for Underactuated Mechanical Systems; Springer: London, UK, 2002. [Google Scholar] [CrossRef]
- Mahindrakar, A.D.; Rao, S.; Banavar, R. Point-to-point control of a 2R planar horizontal underactuated manipulator. Mech. Mach. Theory 2006, 41, 838–844. [Google Scholar] [CrossRef] [Green Version]
- Vela, P.A. Averaging and Control of Nonlinear Systems. Ph.D. Thesis, California Institute of Technology, Pasadena, CA, USA, 2003. [Google Scholar] [CrossRef]
- Zhang, A.; She, J.; Lai, X.; Wu, M. Motion planning and tracking control for an acrobot based on a rewinding approach. Automatica 2013, 49, 278–284. [Google Scholar] [CrossRef]
- Neusser, Z.; Valášek, M. Control of the underactuated mechanical systems using natural motion. Kybernetika 2012, 48, 223–241. [Google Scholar]
- Idà, E.; Briot, S.; Carricato, M. Natural Oscillations of Underactuated Cable-Driven Parallel Robots. IEEE Access 2021, 9, 71660–71672. [Google Scholar] [CrossRef]
- Ramírez-Neria, M.; Sira-Ramírez, H.; Garrido-Moctezuma, R.; Luviano-Juárez, A.; Gao, Z. Active Disturbance Rejection Control for Reference Trajectory Tracking Tasks in the Pendubot System. IEEE Access 2021, 9, 102663–102670. [Google Scholar] [CrossRef]
- Anderle, M.; Čelikovský, S. Feedback design for the Acrobot walking-like trajectory tracking and computational test of its exponential stability. In Proceedings of the 2011 IEEE International Symposium on Computer-Aided Control System Design (CACSD), Denver, CO, USA, 28–30 September 2011; pp. 1026–1031. [Google Scholar] [CrossRef]
- Da, X.; Harib, O.; Hartley, R.; Griffin, B.; Grizzle, J.W. From 2D Design of Underactuated Bipedal Gaits to 3D Implementation: Walking with Speed Tracking. IEEE Access 2016, 4, 3469–3478. [Google Scholar] [CrossRef]
- Zielinska, T.; Rivera Coba, G.R.; Ge, W. Variable Inverted Pendulum Applied to Humanoid Motion Design. Robotica 2021, 39, 1368–1389. [Google Scholar] [CrossRef]
- Lee, S.M.; Park, B.S. Robust Control for Trajectory Tracking and Balancing of a Ballbot. IEEE Access 2020, 8, 159324–159330. [Google Scholar] [CrossRef]
- Raza, F.; Zhu, W.; Hayashibe, M. Balance Stability Augmentation for Wheel-Legged Biped Robot Through Arm Acceleration Control. IEEE Access 2021, 9, 54022–54031. [Google Scholar] [CrossRef]
- Chignoli, M.; Wensing, P.M. Variational-Based Optimal Control of Underactuated Balancing for Dynamic Quadrupeds. IEEE Access 2020, 8, 49785–49797. [Google Scholar] [CrossRef]
- Kanner, O.Y.; Rojas, N.; Odhner, L.U.; Dollar, A.M. Adaptive Legged Robots Through Exactly Constrained and Non-Redundant Design. IEEE Access 2017, 5, 11131–11141. [Google Scholar] [CrossRef]
- Iriarte, I.; Iglesias, I.; Lasa, J.; Calvo-Soraluze, H.; Sierra, B. Enhancing VTOL Multirotor Performance with a Passive Rotor Tilting Mechanism. IEEE Access 2021, 9, 64368–64380. [Google Scholar] [CrossRef]
- Bai, Y.; Svinin, M. Motion Planning and Control for a Class of Partially Differentially Flat Systems. In Proceedings of the 2019 12th International Conference on Developments in eSystems Engineering (DeSE), Kazan, Russia, 7–10 October 2019; pp. 855–860. [Google Scholar] [CrossRef]
- Bai, Y.; Svinin, M.; Magid, E.; Wang, Y. On Motion Planning and Control for Partially Differentially Flat Systems. Robotica 2020, I, 718–734. [Google Scholar] [CrossRef]
- Teel, A.R.; Murray, R.M.; Walsh, G. Nonholonomic control systems: From steering to stabilization with sinusoids. In Proceedings of the 31st IEEE Conference on Decision and Control, Tucson, AZ, USA, 16–18 December 1992; Volume 2, pp. 1603–1609. [Google Scholar] [CrossRef]
- Murray, R.M.; Sastry, S.S. Nonholonomic motion planning: Steering using sinusoids. IEEE Trans. Autom. Control. 1993, 38, 700–716. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.; Kwon, S. Robust transition control of underactuated two-wheeled self-balancing vehicle with semi-online dynamic trajectory planning. Mechatronics 2020, 68, 102366. [Google Scholar] [CrossRef]
- Elkinany, B.; Alfidi, M.; Chaibi, R.; Chalh, Z. T-S Fuzzy System Controller for Stabilizing the Double Inverted Pendulum. Adv. Fuzzy Syst. 2020, 2020, 8835511. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Nonlinear Control of Underactuated Mechanical Systems with Application to Robotics and Aerospace Vehicles. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, CA, USA, 2001. [Google Scholar]
- Aneke, N. Control of Underactuated Mechanical Systems. Ph.D. Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2003. [Google Scholar] [CrossRef]
- Zhao, T.S.; Dai, J.S. Dynamics and Coupling Actuation of Elastic Underactuated Manipulators. J. Robot. Syst. 2003, 20, 135–146. [Google Scholar] [CrossRef]
- He, G.P.; Geng, Z.Y. The nonholonomic redundancy of second-order nonholonomic mechanical systems. Robot. Auton. Syst. 2008, 56, 583–591. [Google Scholar] [CrossRef]
- Xin, X.; Liu, Y. A Set-Point Control for a Two-link Underactuated Robot with a Flexible Elbow Joint. J. Dyn. Syst. Meas. Control. 2013, 135, 051016. [Google Scholar] [CrossRef]
- Chen, W.; Zhao, L.; Zhao, X.; Yu, Y. Control of the Underactuated Flexible Manipulator in the Operational Space. In Proceedings of the 2009 International Conference on Intelligent Human–Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2009; Volume 2, pp. 470–473. [Google Scholar] [CrossRef]
- Rodriguez-Cianca, D.; Rodriguez-Guerrero, C.; Verstraten, T.; Jimenez-Fabian, R.; Vanderborght, B.; Lefeber, D. A Flexible shaft-driven Remote and Torsionally Compliant Actuator (RTCA) for wearable robots. Mechatronics 2019, 59, 178–188. [Google Scholar] [CrossRef]
- Vampola, T.; Valášek, M. Composite rigid body formalism for flexible multibody systems. Multibody Syst. Dyn. 2007, 18, 413–433. [Google Scholar] [CrossRef]
- Neusser, Z.; Valášek, M. Control of the double inverted pendulum on a cart using the natural motion. Acta Polytech. 2013, 53, 883–889. [Google Scholar] [CrossRef]
- Mráz, L. Symbolické Generování Pohybových Rovnic pro Soustavy Poddajných Těles. Master’s Thesis, Czech Technical University in Prague, Prague, Czech Republic, 2010. (In Czech). [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | −0.0256 | 0.0504 | 0.0050 |
| 2 | −0.0251 | −0.0502 | 0.0051 |
| 3 | 0.0253 | 0.0500 | 0.0050 |
| 4 | 0.0255 | −0.0506 | −0.0050 |
| 5 | −0.0253 | 0.0523 | −0.0050 |
| 6 | −0.0264 | −0.0494 | −0.0050 |
| 7 | 0.0251 | 0.0514 | 0.0051 |
| 8 | 0.0263 | −0.0407 | 0.0051 |
| 9 | −0.0251 | 0.0050 | |
| 10 | −0.0252 | −0.0051 | |
| 11 | 0.0253 | −0.0051 | |
| 12 | 0.0251 | −0.0050 | |
| 13 | −0.0253 | 0.0050 | |
| 14 | −0.0252 | 0.0050 | |
| 15 | 0.0244 | 0.0050 | |
| 16 | 0.0225 | −0.0050 | |
| 17 | −0.0050 | ||
| 18 | −0.0051 | ||
| 19 | 0.0051 | ||
| 20 | 0.0051 | ||
| 21 | 0.0052 | ||
| 22 | −0.0050 | ||
| 23 | −0.0050 | ||
| 24 | −0.0051 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Neusser, Z.; Nečas, M.; Valášek, M. Control of Flexible Robot by Harmonic Functions. Appl. Sci. 2022, 12, 3604. https://doi.org/10.3390/app12073604
Neusser Z, Nečas M, Valášek M. Control of Flexible Robot by Harmonic Functions. Applied Sciences. 2022; 12(7):3604. https://doi.org/10.3390/app12073604
Chicago/Turabian StyleNeusser, Zdeněk, Martin Nečas, and Michael Valášek. 2022. "Control of Flexible Robot by Harmonic Functions" Applied Sciences 12, no. 7: 3604. https://doi.org/10.3390/app12073604
APA StyleNeusser, Z., Nečas, M., & Valášek, M. (2022). Control of Flexible Robot by Harmonic Functions. Applied Sciences, 12(7), 3604. https://doi.org/10.3390/app12073604