
Applicability of Machine Learning for Vessel Dimension Survey with a Minimum Number of Common Points

 ,
,  ,
,  ,
, 
Abstract
:Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Data Preparation
- —vector (point) in the original (primary) coordinate system,
- —vector (point) in the secondary coordinate system,
- —translation vector,
- λ—scale factor,
- R—rotation matrix.
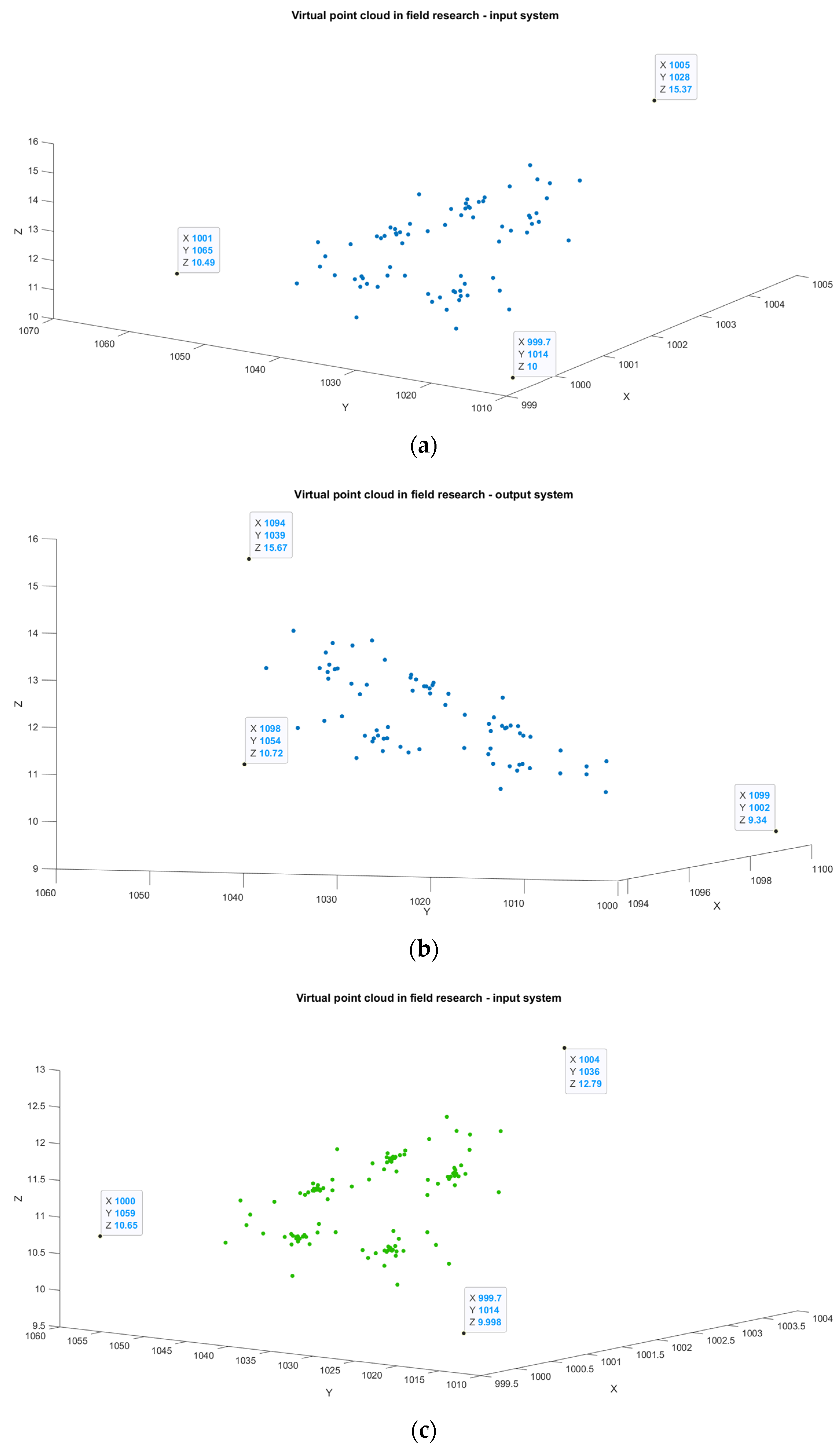
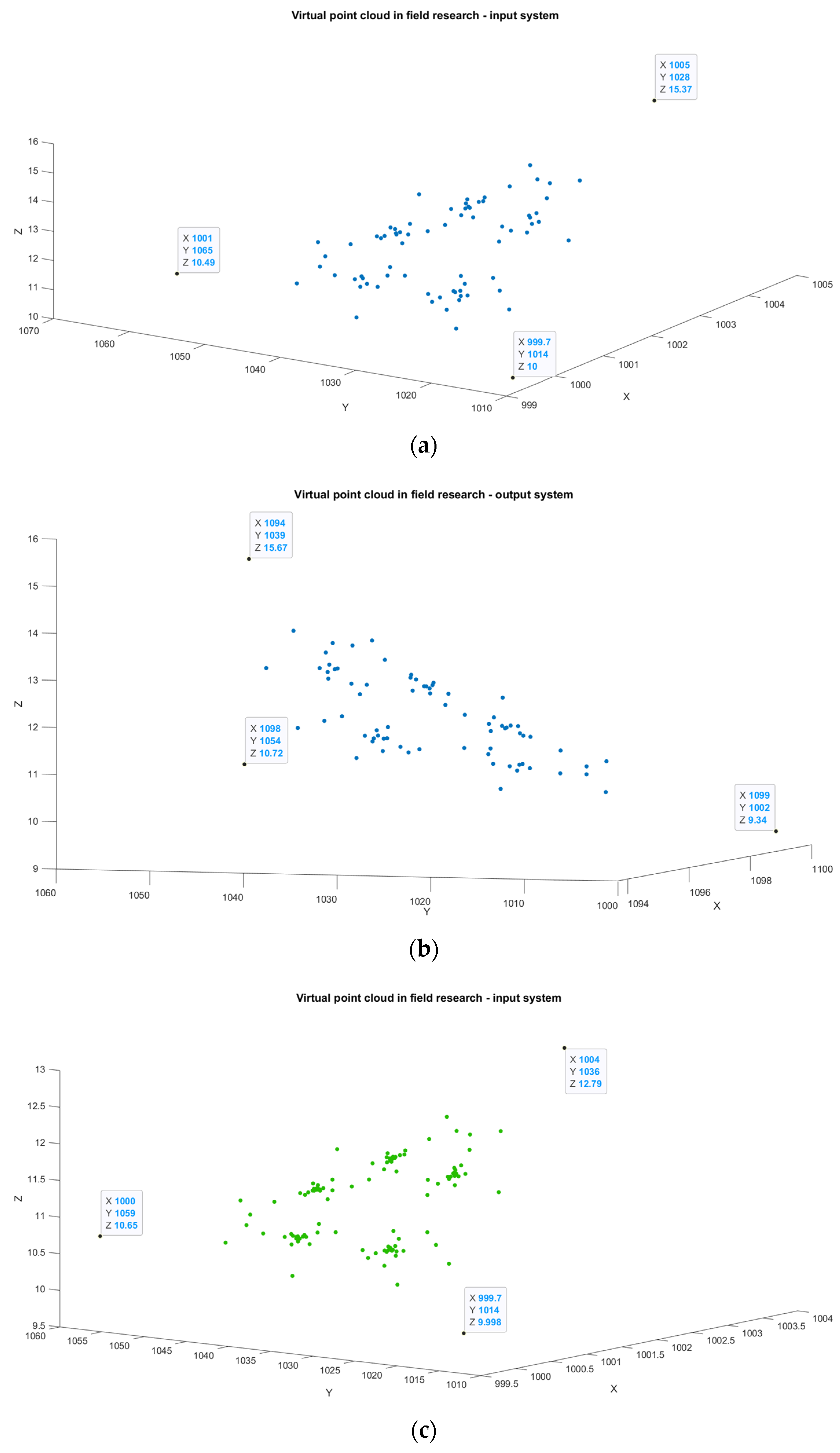
2.2. Generation of a Virtual Point Cloud
- —coordinates of the centroid (center of mass)
2.3. The Use of Artificial Neural Networks
- U—the number of learning cases
- I—the number of neurons in the input layer
- H—the number of neurons in the hidden layer
- O—the number of neurons in the output layer
3. Results
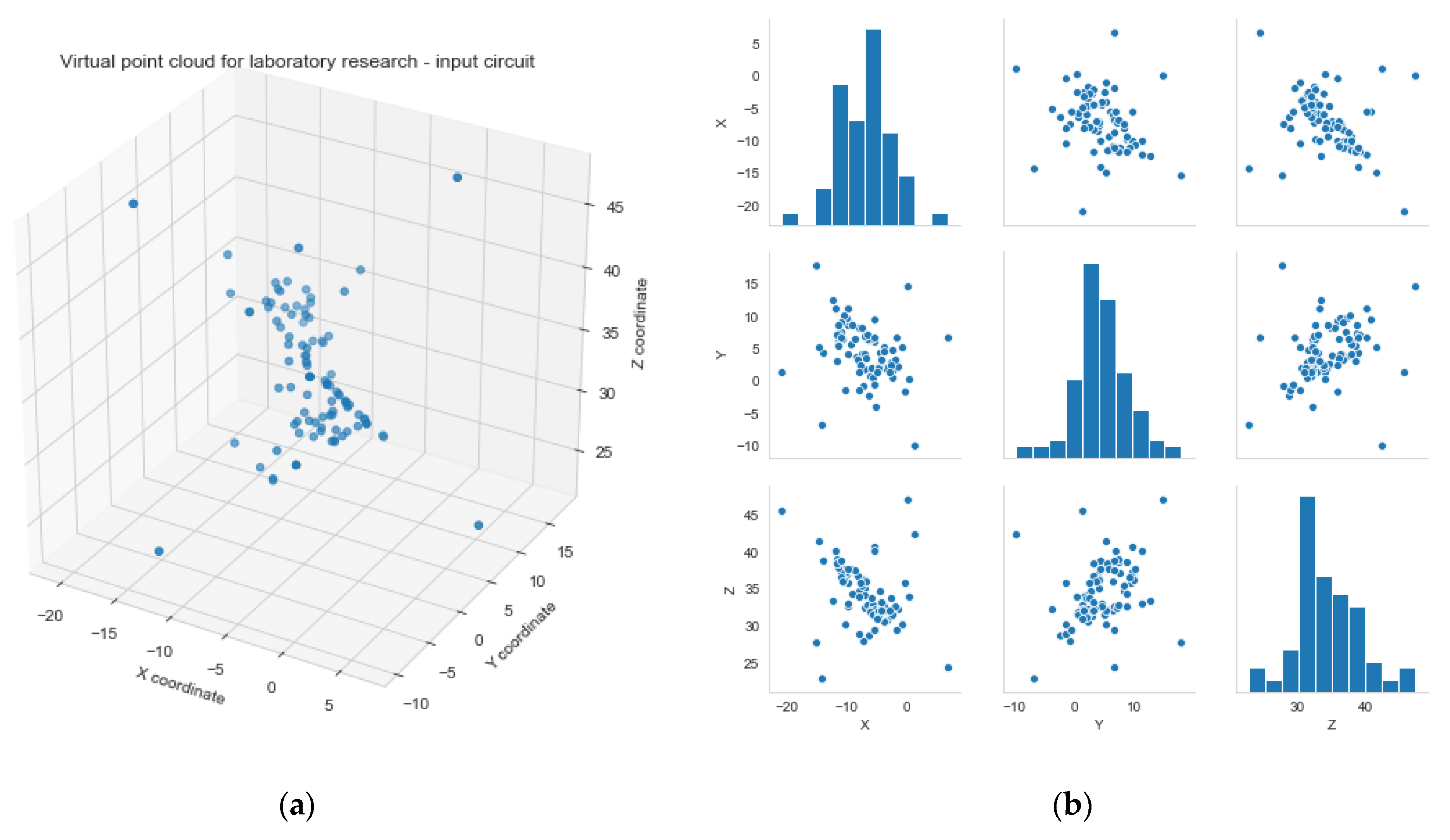
Generating a Virtual Point Cloud
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hooijberg, M. Practical Geodesy; Springer: Jersey City, NJ, USA, 1997. [Google Scholar] [CrossRef]
- Titterton, D.; Weston, J. Strapdown Inertial Navigation Technology, 2nd ed.; The American Institute of Aeronautics and Astronautics: Herts, UK; The Institution of Electrical Engineers: Reston, VA, USA, 2004. [Google Scholar]
- Krichenbauer, M.; Yamamoto, G.; Taketom, T.; Sandor, C.; Kato, H. Augmented Reality versus Virtual Reality for 3D Object Manipulation. IEEE Trans. Vis. Comput. Graph. 2018, 24, 1038–1048. [Google Scholar] [CrossRef] [PubMed]
- Sra, M.; Garrido-Jurado, S.; Schmandt, C.; Maes, P. Procedurally generated virtual reality from 3D reconstructed physical space. In Proceedings of the ACM Symposium on Virtual Reality Software and Technology VRST, Munich, Germany, 2–4 November 2016; pp. 191–200. [Google Scholar] [CrossRef] [Green Version]
- Hofmann-Wellenhof, B.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems—GPS, GLONASS, Galileo, and More; Springer: Vienna, Austria, 2007. [Google Scholar] [CrossRef] [Green Version]
- Schofield, W.; Breach, M. Engineering Surveying, 6th ed.; Butterworth-Heinemann: Oxford, UK, 2007. [Google Scholar]
- Soler, T. A compendium of transformation formulas useful in GPS work. J. Geod. 1998, 72, 482–491. [Google Scholar] [CrossRef] [Green Version]
- Kilford, W.K. Surveying for engineers. Surv. Rev. 1979, 25, 94–96. [Google Scholar] [CrossRef]
- National Occupational Standards Offshore Surveying and Positioning; Taylor & Francis Online: Abingdon, UK, 2013; Available online: https://taylorandfrancis.com/ (accessed on 2 February 2022).
- Baetslé, P.-L. Conformal transformations in three dimensions. Photogramm. Eng. Remote Sens. 1966, 35, 816–824. [Google Scholar]
- Ruffhead, C. Equivalence properties of 3D conformal transformations and their application to reverse transformations. Surv. Rev. 2020, 53, 158–168. [Google Scholar] [CrossRef]
- Deakin, R.E. 3-D coordinate transformations. Surv. Land Inf. Syst. 1998, 58, 223–234. [Google Scholar] [CrossRef]
- Schut, G.H. Similarity Transformation and least Squares. Photogramm. Eng. 1973, 621–627. [Google Scholar]
- Markley, F.L.; Crassidis, J.L.; Markley, F.L.; Crassidis, J.L. Euler Angles. In Fundamentals of Spacecraft Attitude Determination and Control; Springer: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Brazeal, R. Three Dimensional Coordinate Transformations for Registering Terrestrial Laser Scanning Datasets Based on Tie Points. No. SUR 6905-Point Cloud Analysis. 2013. Available online: https://www.researchgate.net/publication/265014559_THREE_DIMENSIONAL_COORDINATE_TRANSFORMATIONS_FOR_REGISTERING_TERRESTRIAL_LASER_SCANNING_DATASETS_BASED_ON_TIE_POINTS?channel=doi&linkId=53fbef070cf2dca8fffee54b&showFulltext=true (accessed on 2 February 2022).
- Stępień, G.; Tomczak, A.; Loosaar, M.; Ziębka, T. Dimensioning method of floating offshore objects by means of quasi-similarity transformation with reduced tolerance errors. Sensors 2020, 20, 6497. [Google Scholar] [CrossRef] [PubMed]
- El-Ashmawy, K.L.A. A comparison between analytical aerial photogrammetry, laser scanning, total station and global positioning system surveys for generation of digital terrain model. Geocarto Int. 2014, 154–162. [Google Scholar] [CrossRef]
- Huang, J.; You, S. Point cloud matching based on 3D self-similarity. In Proceedings of the 2012 IEEE Computer Society Conference on Computer Vision and Pattern Recognition Workshops, Providence, RI, USA, 16–21 June 2012; pp. 41–48. [Google Scholar] [CrossRef]
- Bejger, A.; Gawdzińska, K. An attempt to use the coherence function for testing the structure of saturated composite castings. Metalurgija 2015, 54, 361–364. [Google Scholar]
- Brazetti, L.; Scaioni, M. Automatic orientation of image sequences for 3D object reconstruction: First results of a method integrating photogrammetric and computer vision algorithms. Int. Arch. Photogramm. Remote Sens. 2009, XXXVIII, 25–28. [Google Scholar]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef] [Green Version]
- Sweeney, C.; Kneip, L.; Höllerer, T.; Turk, M. Computing similarity transformations from only image correspondences. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3305–3313. [Google Scholar] [CrossRef] [Green Version]
- Śledziowski, J.; Terefenko, P.; Giza, A.; Forczmański, P.; Łysko, A.; Maćków, W.; Stępień, G.; Tomczak, A.; Kurylczyk, A. Application of Unmanned Aerial Vehicles and Image Processing Techniques in Monitoring Underwater Coastal Protection Measures. Remote Sens. 2022, 14, 458. [Google Scholar] [CrossRef]
- Jue, X. Research on close-range photogrammetry with big rotation angle. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, XXXVII, 11–14. [Google Scholar]
- Lin, D. An Information-Theoretic Definition of Similarity. 1998. Available online: https://www.cse.iitb.ac.in/~cs626-449/Papers/WordSimilarity/3.pdf (accessed on 2 February 2022).
- Henderson, D. Euler Angles, Quaternions, and Transformation Matrices. NASA JSC Report; 1977; pp. 1–39. Available online: https://ntrs.nasa.gov/search.jsp?R=19770019231 (accessed on 2 February 2022).
- Odziemczyk, W. Application of simulated annealing algorithm for 3D coordinate transformation problem solution. Open Geosci. 2020, 12, 491–502. [Google Scholar] [CrossRef]
- Stępień, G.; Zalas, E.; Ziębka, T. New approach to isometric transformations in oblique local coordinate systems of reference. Geod. Cartogr. 2017, 66, 291–303. [Google Scholar] [CrossRef]
- Stępień, G. Transformacje Symetryczne w Nachylonych Układach Odniesienia z Wykorzystaniem Metod Analizy Funkcjonalnej; Wydawnictwo Naukowe Akademii Morskiej w Szczecinie: Szczecin, Poland, 2018. [Google Scholar]
- Denton, A. Marine surveying of offshore units. In Offshore Surveying for the Civil Engineering Industry; Institution of Civil Engineers: London, UK, 1977; pp. 1–8. [Google Scholar] [CrossRef]
- Brading, K.; Castellani, E.; Teh, N. Symmetry and Symmetry Breaking. Stanford Encyclopedia of Philosophy. 2013. Available online: https://plato.stanford.edu/entries/symmetry-breaking/ (accessed on 12 December 2018).
- Castillo, G.F.T. Point symmetries of the Euler—Lagrange equations. Rev. Mex. Fıs. 2014, 60, 129–135. [Google Scholar]
- Andrea, T.A.; Kalayeh, H. Applicatios of neural networks in quantitative structure-activity relationships of dihydrofolate reductase inhibitors. J. Med. Chem. 1991, 34, 2824–2836. [Google Scholar] [CrossRef] [PubMed]
- Géron, Hands-on Machine Learning with Scikit-Learn, Keras, and TensorFlow: Concepts, Tools, and Techniques to Build Intelligent Systems; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2019.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The Input Layout [m] | The Output System [m] | |||||
|---|---|---|---|---|---|---|
| Nr | X | Y | Z | X | Y | Z |
| 1 | −7.0000 | 4.0000 | 35.0000 | −1.8000 | 26.4000 | 52.5000 |
| 2 | 1.2507 | −9.8422 | 42.3021 | 13.4545 | 17.4637 | 53.1658 |
| 3 | 6.9082 | 6.7006 | 24.4044 | 5.6640 | 38.3434 | 41.7928 |
| 4 | −15.2507 | 17.8422 | 27.6979 | −17.0545 | 35.3363 | 51.8342 |
| 5 | −20.9083 | 1.2994 | 45.5956 | −9.2640 | 14.4566 | 63.2072 |
| 6 | 0.17543 | 14.6818 | 47.1413 | 3.1588 | 35.9130 | 66.5682 |
| 7 | −14.1754 | −6.6818 | 22.8587 | −6.7588 | 16.8870 | 38.4318 |
| 8 | 1.25067 | −9.8422 | 42.3021 | 13.4545 | 17.4637 | 53.1658 |
| 9 | 0.3863 | 0.2861 | 33.9022 | 5.7728 | 27.4023 | 49.1529 |
| 10 | −2.3639 | 4.9002 | 31.4681 | 0.6880 | 30.3811 | 48.9309 |
| … | ||||||
| 105 | −2.4540 | 1.5626 | 31.5933 | 2.1205 | 27.5579 | 47.8630 |
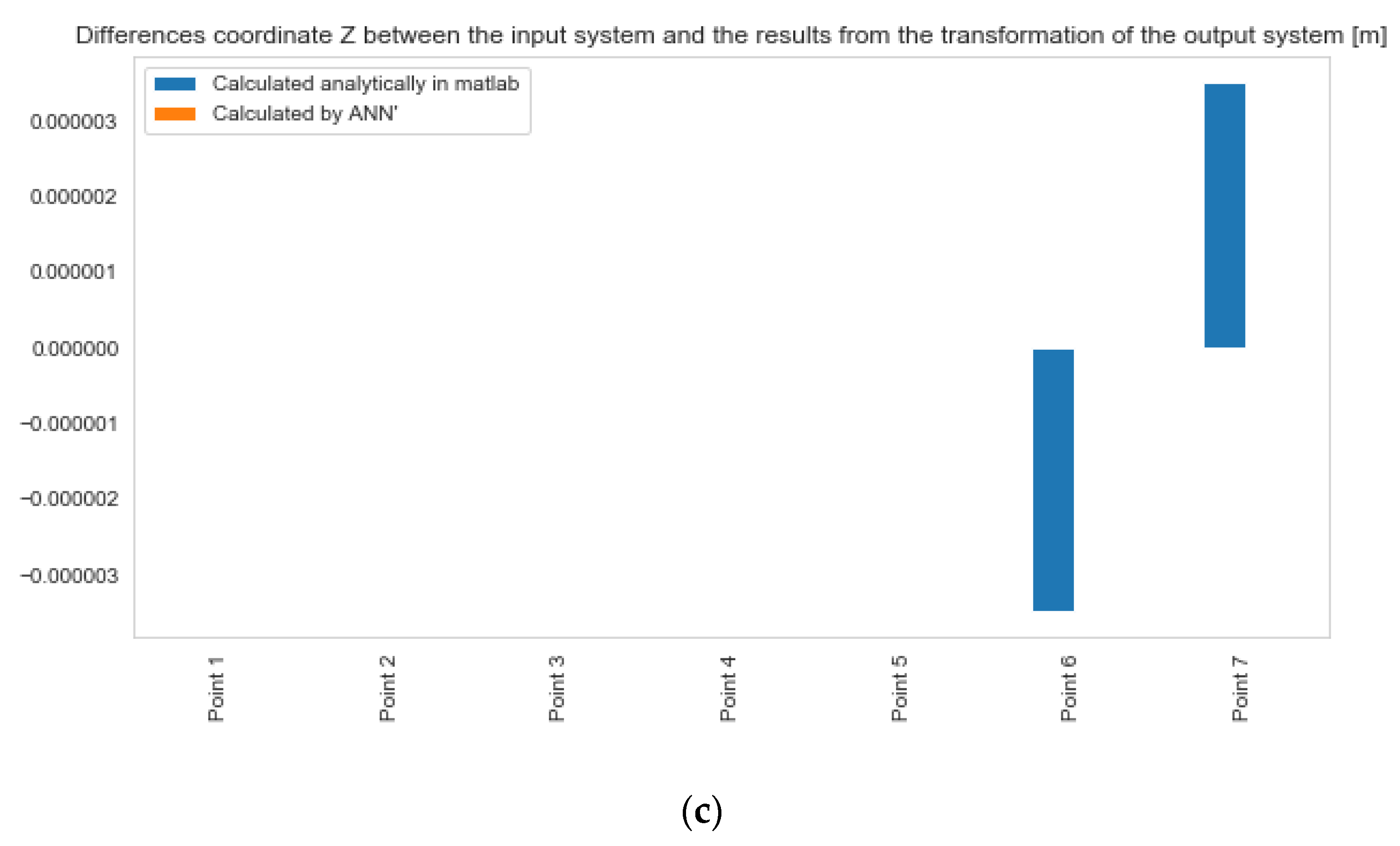
| Coordinate Differences between the Input System and the Results from the Transformation of the Output System [m] | ||||||
|---|---|---|---|---|---|---|
| Calculated Analytically in Matlab | Calculated by ANN | |||||
| X | Y | Z | X | Y | Z | |
| RMSE | ||||||
| RMSE (of point) | ||||||
| Station 1—Input Coordinate System for Set Z1 | Station 2—Output Coordinate System for Set Z1 | Station 1—Input Coordinate System for Set Z2 | Station 2—Output Coordinate System for Set Z2 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Nr | X | Y | Z | X | Y | Z | Nr | X | Y | Z | X | Y | Z |
| 1 | 1003.007 | 1035.290 | 13.307 | 1095.810 | 1031.870 | 13.299 | 1 | 1002.191 | 1038.655 | 11.820 | 1096.767 | 1028.608 | 11.674 |
| 2 | 1002.413 | 1037.865 | 12.620 | 1096.521 | 1029.355 | 12.507 | 2 | 1001.663 | 1039.589 | 11.498 | 1097.336 | 1027.715 | 11.308 |
| 3 | 1002.628 | 1038.654 | 12.843 | 1096.352 | 1028.549 | 12.705 | 3 | 1001.832 | 1040.694 | 11.615 | 1097.226 | 1026.599 | 11.388 |
| 4 | 1002.683 | 1037.270 | 12.923 | 1096.228 | 1029.925 | 12.837 | 4 | 1001.895 | 1039.646 | 11.644 | 1097.109 | 1027.641 | 11.457 |
| 5 | 1002.694 | 1045.243 | 12.819 | 1096.625 | 1021.971 | 12.443 | 5 | 1001.797 | 1039.976 | 11.586 | 1097.224 | 1027.318 | 11.384 |
| 6 | 1003.188 | 1032.785 | 13.542 | 1095.505 | 1034.353 | 13.628 | 6 | 1001.842 | 1040.105 | 11.615 | 1097.186 | 1027.186 | 11.410 |
| 7 | 1002.215 | 1038.724 | 12.391 | 1096.759 | 1028.517 | 12.243 | 7 | 1001.846 | 1039.909 | 11.615 | 1097.173 | 1027.382 | 11.417 |
| 8 | 1002.699 | 1038.917 | 12.917 | 1096.296 | 1028.280 | 12.772 | 8 | 1001.806 | 1046.359 | 11.655 | 1097.545 | 1020.945 | 11.221 |
| 9 | 1002.701 | 1036.808 | 12.950 | 1096.187 | 1030.383 | 12.881 | 9 | 1002.374 | 1036.928 | 11.918 | 1096.498 | 1030.318 | 11.838 |
| … | |||||||||||||
| 85 | 999.686 | 1013.576 | 9.998 | 1097.936 | 1053.832 | 10.717 | 139 | 999.686 | 1013.576 | 9.998 | 1097.936 | 1053.832 | 10.717 |
| 86 | 1000.831 | 1065.357 | 10.486 | 1099.473 | 1002.076 | 9.344 | 140 | 1000.000 | 1059.384 | 10.648 | 1099.998 | 1008.076 | 9.707 |
| 87 | 1004.789 | 1027.565 | 15.368 | 1093.676 | 1039.414 | 15.674 | 141 | 1003.776 | 1035.856 | 12.789 | 1095.061 | 1031.284 | 12.774 |
| Parameter | Laboratory Tests | Field Research | ||
|---|---|---|---|---|
| Master Data (Ideal) | Data Distorted | Dataset Z1 | Dataset Z2 | |
| Type of network | MLP | MLP | MLP | MLP |
| No. of chosen networks | 5 | 5 | 5 | 5 |
| No. of hidden layers | 1 | 1 | 1 | 1 |
| No. of neurons | 4–10 | 4–10 | 6–10 | 4–9 |
| Activation function for the hidden layer | linear | linear | Linear—2 Logistics—2 Exponential—1 | Linear—2 Logistics—1 Tanh—1 Exponential—1 |
| Activation function for the output layer | linear | linear | linear | linear |
| Number of points (total) | 105 | 105 | 87 | 141 |
| Training set (no. of points) | 75 | 75 | 61 | 99 |
| Validation set | 15 | 15 | 13 | 21 |
| Test set | 15 | 15 | 13 | 21 |
| Maximum error [mm] in the validation and test set | ||||
| Mean error mp [mm] of the ANN and analytical (similarity and gradient) model | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garczyńska, I.; Tomczak, A.; Stępień, G.; Kasyk, L.; Ślączka, W.; Kogut, T. Applicability of Machine Learning for Vessel Dimension Survey with a Minimum Number of Common Points. Appl. Sci. 2022, 12, 3453. https://doi.org/10.3390/app12073453
Garczyńska I, Tomczak A, Stępień G, Kasyk L, Ślączka W, Kogut T. Applicability of Machine Learning for Vessel Dimension Survey with a Minimum Number of Common Points. Applied Sciences. 2022; 12(7):3453. https://doi.org/10.3390/app12073453
Chicago/Turabian StyleGarczyńska, Ilona, Arkadiusz Tomczak, Grzegorz Stępień, Lech Kasyk, Wojciech Ślączka, and Tomasz Kogut. 2022. "Applicability of Machine Learning for Vessel Dimension Survey with a Minimum Number of Common Points" Applied Sciences 12, no. 7: 3453. https://doi.org/10.3390/app12073453
APA StyleGarczyńska, I., Tomczak, A., Stępień, G., Kasyk, L., Ślączka, W., & Kogut, T. (2022). Applicability of Machine Learning for Vessel Dimension Survey with a Minimum Number of Common Points. Applied Sciences, 12(7), 3453. https://doi.org/10.3390/app12073453