
Comparisons of Dynamic Landslide Models on GIS Platforms


Abstract
:1. Introduction
2. Models
2.1. Descriptions
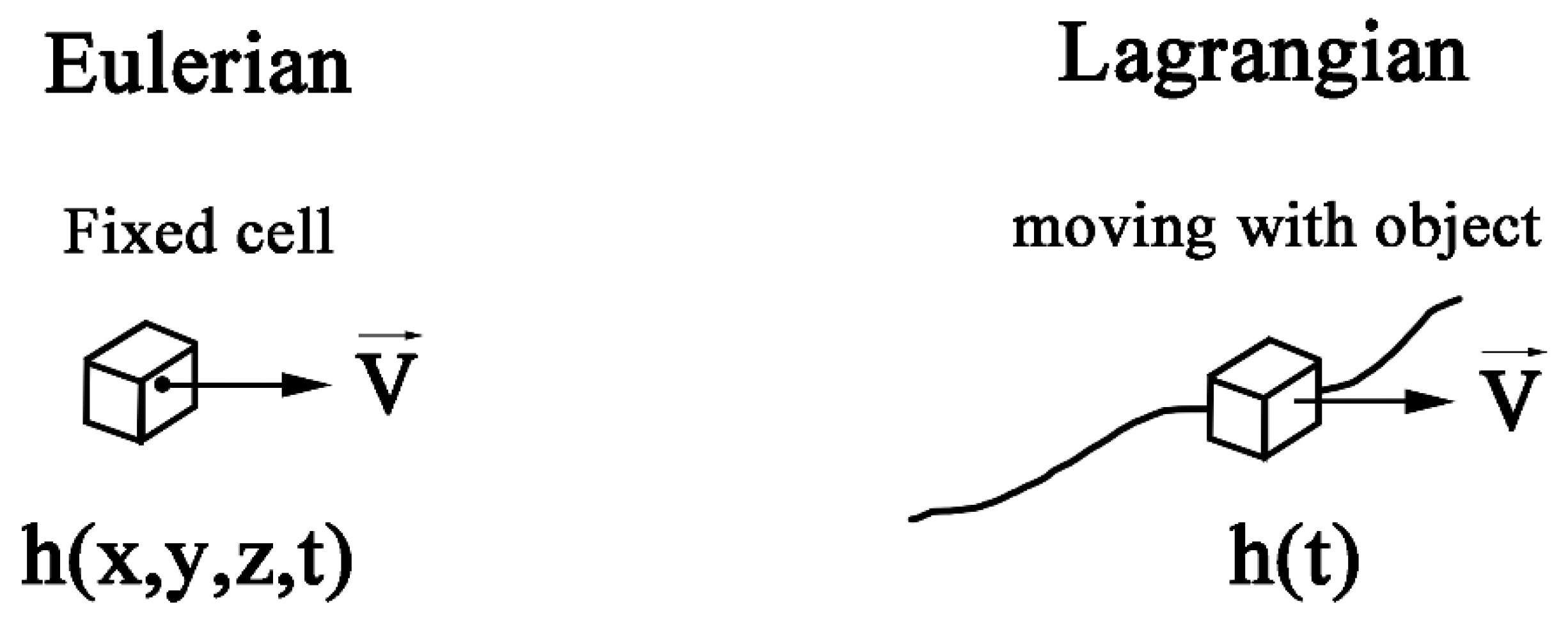
2.1.1. Models Based on the Lagrangian Description
2.1.2. Models Based on the Eulerian Description
2.2. Forces
2.2.1. Collision Force
2.2.2. Friction Force
- (1)
- The Newtonian fluid is:
- (2)
- The Bingham fluid model is
- (3)
- The quadratic fluid model is
2.2.3. Other Forces
3. Software
3.1. Programs Based on the Rigid Body Model
3.2. Programs Based on the Flow-like Model
4. Results and Discussion
4.1. Reason for Differences
4.1.1. Differences Caused by Models
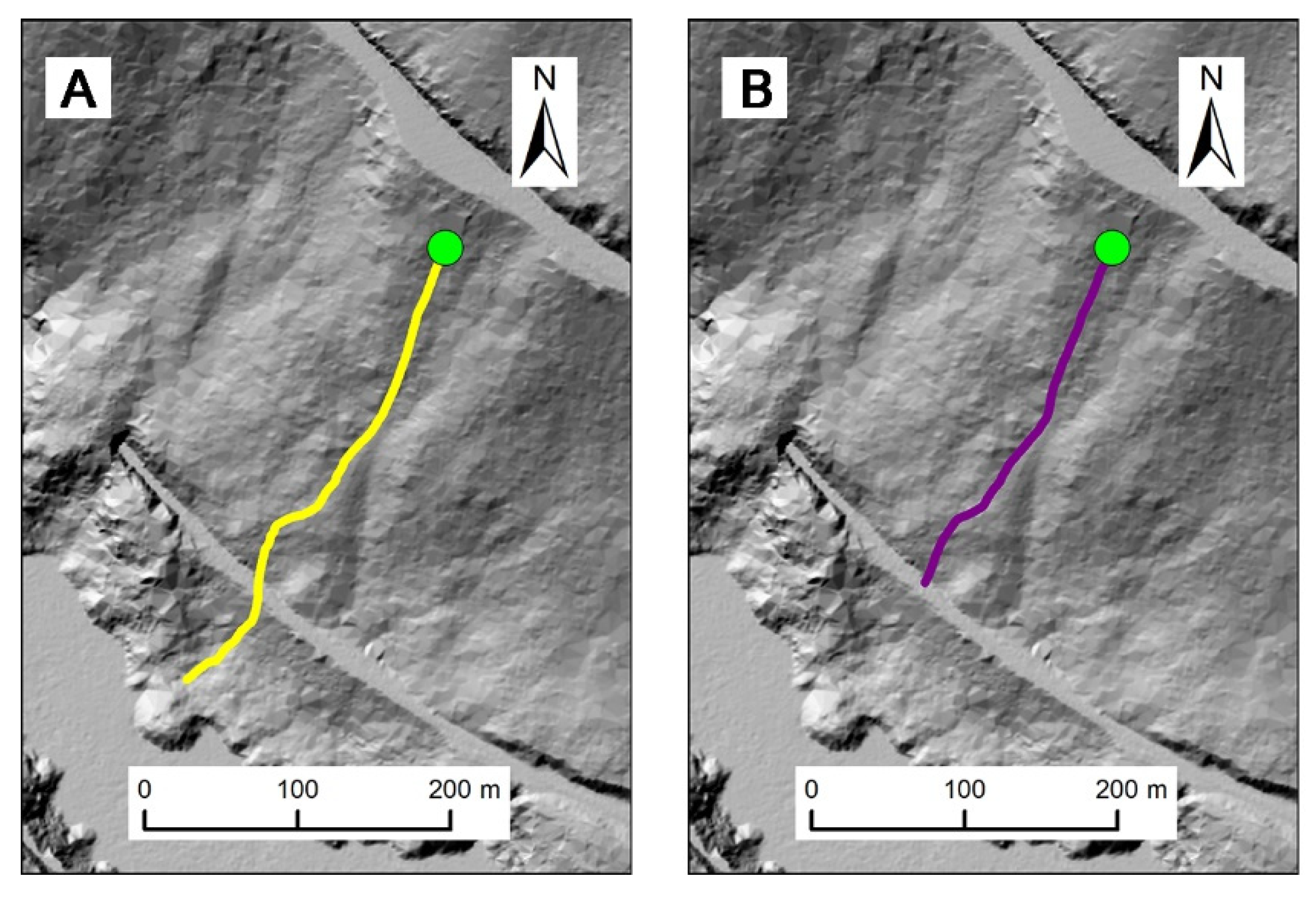
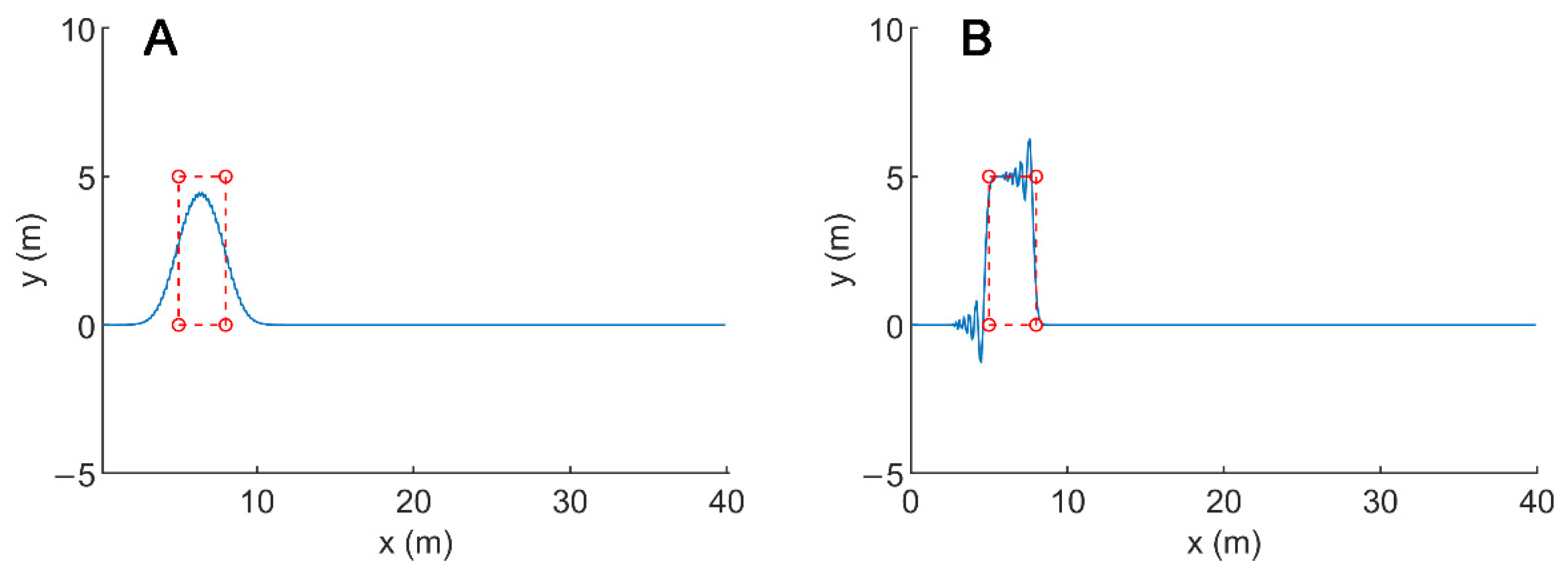
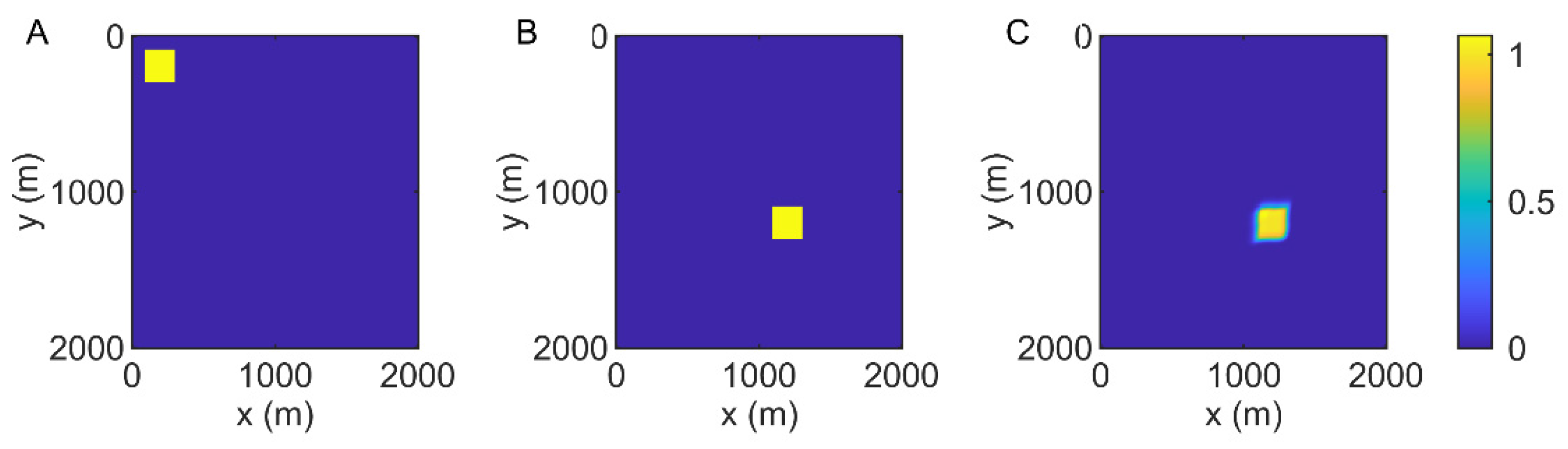
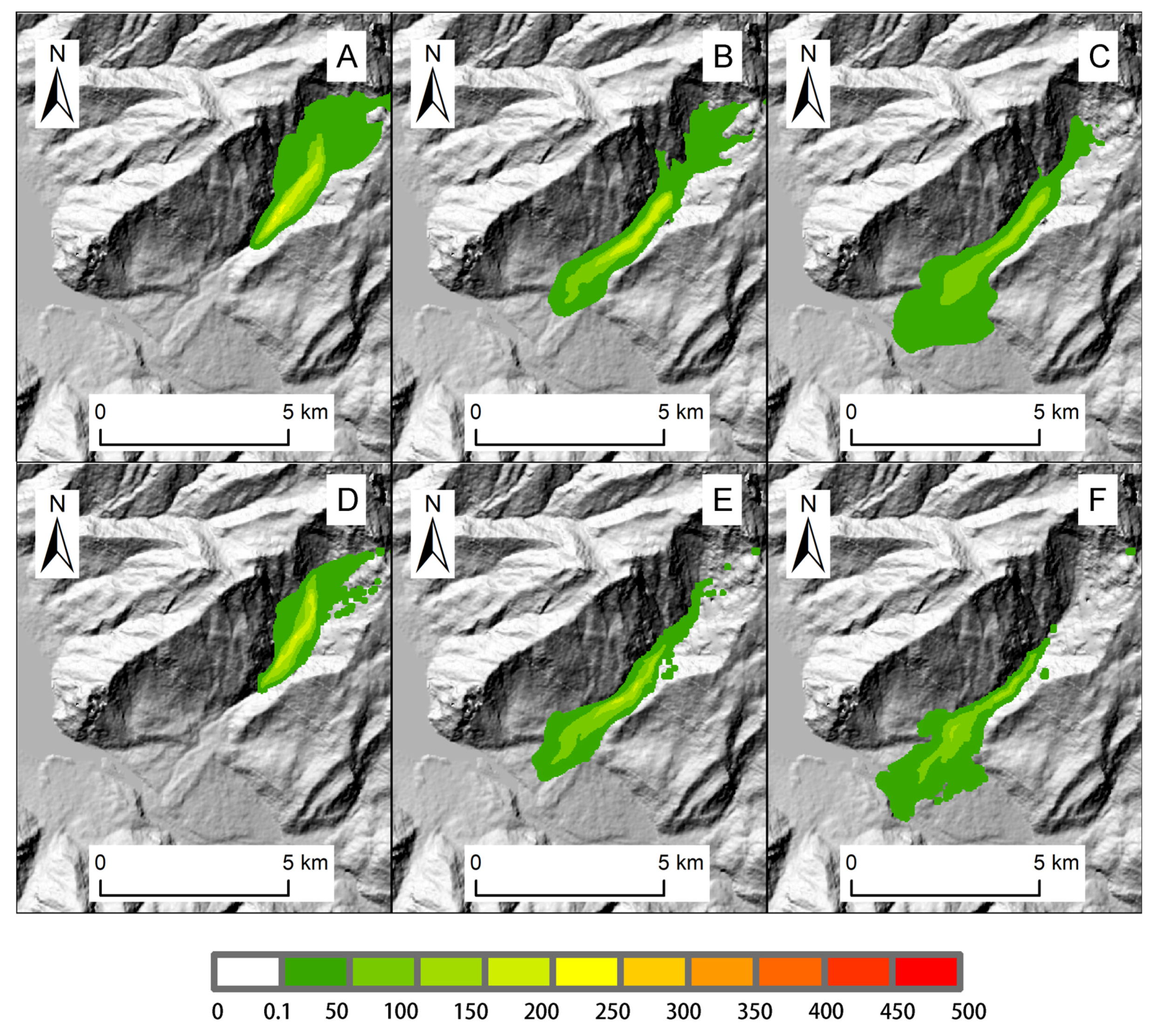
4.1.2. Differences Caused by Algorithms
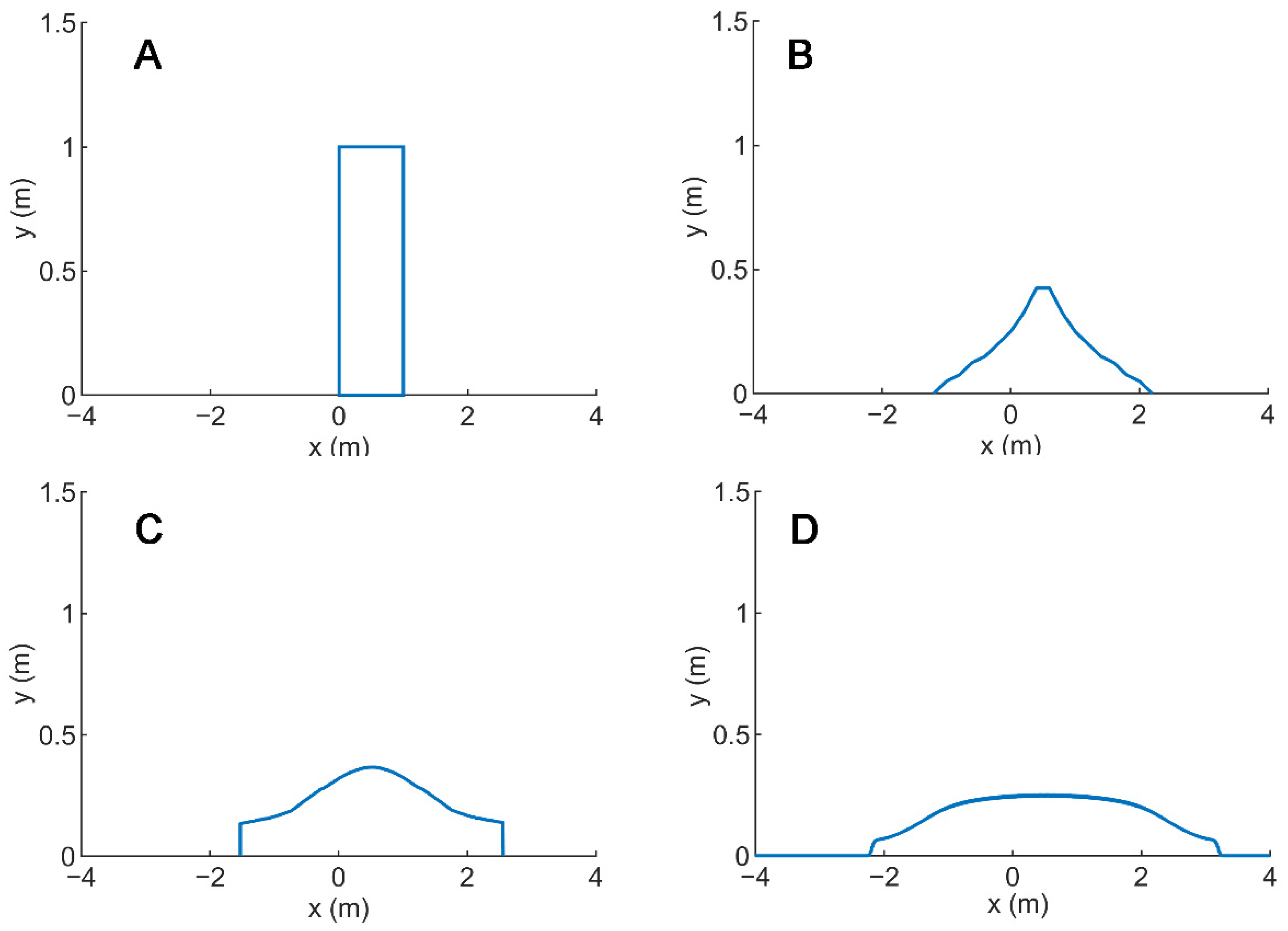
4.1.3. Differences Caused by Description
4.2. Model Selection
5. Conclusions
- (1)
- A suitable model with proper assumptions can reduce uncertainties and simplify calculations. We must select suitable models to simulate different types of landslides. The proposed classification can provide some guidance for model selection. Landslide classification helps us understand landslide phenomena and select suitable dynamic models.
- (2)
- Compared with the two different models, the 3-D model can describe more details of the moving process than the depth-averaged model. Landslide runout zone, height, and speed are critical parameters in engineering design. The depth-averaged model meets the actual needs and provides engineering parameters quickly. Therefore, we can use the depth-averaged model to obtain the runout zones. If we pay more attention to the details, such as surge waves, the 3-D landslide simulation model is better.
- (3)
- A small difference in algorithms can produce a large difference in the runout zones. We should use as many algorithms as possible to obtain the trajectory for engineering design.
- (4)
- The number of elements, property, and material size determine the model selection. For discrete rigid body motion, models based on the Lagrangian description are suitable; for flow-like motion, models based on the Eulerian description are proper; for materials with various properties, models based on the Eulerian–Lagrangian description are best.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- McDougall, S. 2014 Canadian Geotechnical Colloquium: Landslide runout analysis—Current practice and challenges. Can. Geotech. J. 2017, 54, 605–620. [Google Scholar] [CrossRef] [Green Version]
- Lo, C.-M.; Feng, Z.-Y.; Chang, K.-T. Landslide hazard zoning based on numerical simulation and hazard assessment. Geomat. Nat. Hazards Risk 2018, 9, 368–388. [Google Scholar] [CrossRef] [Green Version]
- Pastor, M.; Blanc, T.; Haddad, B.; Petrone, S.; Sanchez Morles, M.; Drempetic, V.; Issler, D.; Crosta, G.; Cascini, L.; Sorbino, G. Application of a SPH depth-integrated model to landslide run-out analysis. Landslides 2014, 11, 793–812. [Google Scholar] [CrossRef] [Green Version]
- Pedrazzini, A.; Froese, C.R.; Jaboyedoff, M.; Hungr, O.; Humair, F. Combining digital elevation model analysis and run-out modeling to characterize hazard posed by a potentially unstable rock slope at Turtle Mountain, Alberta, Canada. Eng. Geol. 2012, 128, 76–94. [Google Scholar] [CrossRef]
- Sun, D.; Xu, J.; Wen, H.; Wang, D. Assessment of landslide susceptibility mapping based on Bayesian hyperparameter optimization: A comparison between logistic regression and random forest. Eng. Geol. 2021, 281, 105972. [Google Scholar] [CrossRef]
- Liu, J.; Wu, Y.; Gao, X.; Zhang, X. A Simple Method of Mapping Landslides Runout Zones Considering Kinematic Uncertainties. Remote Sens. 2022, 14, 668. [Google Scholar] [CrossRef]
- Fell, R.; Corominas, J.; Bonnard, C.; Cascini, L.; Leroi, E.; Savage, W.Z. Guidelines for landslide susceptibility, hazard and risk zoning for land-use planning. Eng. Geol. 2008, 102, 99–111. [Google Scholar] [CrossRef] [Green Version]
- Glade, T.; Crozier, M.J. The nature of landslide hazard impact. In Landslide Hazard Risk; Wiley: Chichester, UK, 2005; pp. 43–74. [Google Scholar]
- Lan, H.; Martin, C.D.; Lim, C.H. RockFall analyst: A GIS extension for three-dimensional and spatially distributed rockfall hazard modeling. Comput. Geosci. 2007, 33, 262–279. [Google Scholar] [CrossRef]
- Stevens, W.D. RocFall, a Tool for Probabilistic Analysis, Design of Remedial Measures and Prediction of Rockfalls. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 1998. [Google Scholar]
- Dorren, L.K. Rockyfor3D (v5. 2) revealed—Transparent description of the complete 3D rockfall model. ecorisQ Pap. 2015, 32, 1–33. [Google Scholar]
- Ouyang, C.; He, S.; Xu, Q.; Luo, Y.; Zhang, W. A MacCormack-TVD finite difference method to simulate the mass flow in mountainous terrain with variable computational domain. Comput. Geosci. 2013, 52, 1–10. [Google Scholar] [CrossRef]
- FLO-2D. FLO-2D Reference Manual; FLO-2D Software Inc.: Nutrioso, AZ, USA, 2017. [Google Scholar]
- Mergili, M.; Fischer, J.-T.; Krenn, J.; Pudasaini, S.P. R.avaflow v1, an advanced open-source computational framework for the propagation and interaction of two-phase mass flows. Geosci. Model Dev. 2017, 10, 553–569. [Google Scholar] [CrossRef] [Green Version]
- Sheridan, M.F.; Stinton, A.J.; Patra, A.; Pitman, E.; Bauer, A.; Nichita, C. Evaluating Titan2D mass-flow model using the 1963 Little Tahoma peak avalanches, Mount Rainier, Washington. J. Volcanol. Geotherm. Res. 2005, 139, 89–102. [Google Scholar] [CrossRef]
- Scaringi, G.; Fan, X.; Xu, Q.; Liu, C.; Ouyang, C.; Domènech, G.; Yang, F.; Dai, L. Some considerations on the use of numerical methods to simulate past landslides and possible new failures: The case of the recent Xinmo landslide (Sichuan, China). Landslides 2018, 15, 1359–1375. [Google Scholar] [CrossRef]
- Chang, Y.-S.; Chang, T.-J. SPH simulations of solute transport in flows with steep velocity and concentration gradients. Water 2017, 9, 132. [Google Scholar] [CrossRef]
- Mishra, B.; Rajamani, R.K. The discrete element method for the simulation of ball mills. Appl. Math. Model. 1992, 16, 598–604. [Google Scholar] [CrossRef]
- Rigaux, P.; Scholl, M.; Voisard, A. Spatial Databases: With Application to GIS; Morgan Kaufmann: Burlington, MA, USA, 2002. [Google Scholar]
- Heim, A. Landslides and Human Lives (Bergsturz und Menchenleben); Bi-Tech Publishers: Vancouver, BC, USA, 1932; p. 196. [Google Scholar]
- Zaruba, Q.; Mencl, V. Landslides and Their Control; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Sharpe, C. Landslides and Related Phenomena; Columbia University Press: New York, NY, USA, 1938. [Google Scholar]
- Hungr, O.; Leroueil, S.; Picarelli, L. The Varnes classification of landslide types, an update. Landslides 2014, 11, 167–194. [Google Scholar] [CrossRef]
- Varnes, D.J. Landslide types and processes. Landslides Eng. Pract. 1958, 24, 20–47. [Google Scholar]
- Cruden, D.; Varnes, D. Landslide types and processes. In Landslides-Investigation and Mitigation; National Research Council Transportation Research Board Special Report 247; Turner, K.A., Schuster, R.L., Eds.; Transportation Research Board: Washington, DC, USA, 1996. [Google Scholar]
- WP/WLI. UNESCO Working Party for World Landslide Inventory G 1993; BiTech Publishers Ltd.: Richmond, BC, Canada, 1993. [Google Scholar]
- Varnes, D.J. Slope movement types and processes. Spec. Rep. 1978, 176, 11–33. [Google Scholar]
- Dorren, L.K. A review of rockfall mechanics and modelling approaches. Prog. Phys. Geogr. 2003, 27, 69–87. [Google Scholar] [CrossRef]
- Iverson, R.M. Landslide triggering by rain infiltration. Water Resour. Res. 2000, 36, 1897–1910. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Xu, G. Back-Analysis of Water Waves Generated by the Xintan Landslide. In Landslide Disaster Mitigation in Three Gorges Reservoir, China; Springer: Berlin/Heidelberg, Germany, 2009; pp. 433–445. [Google Scholar]
- Wu, Y.; Lan, H. Debris flow analyst (DA): A debris flow model considering kinematic uncertainties and using a GIS platform. Eng. Geol. 2020, 279, 105877. [Google Scholar] [CrossRef]
- Iverson, R.M.; Denlinger, R.P. Flow of variably fluidized granular masses across three-dimensional terrain: 1. Coulomb mixture theory. J. Geophys. Res. Solid Earth 2001, 106, 537–552. [Google Scholar] [CrossRef]
- Iverson, R.M. The physics of debris flows. Rev. Geophys. 1997, 35, 245–296. [Google Scholar] [CrossRef] [Green Version]
- Savage, S.B.; Hutter, K. The motion of a finite mass of granular material down a rough incline. J. Fluid Mech. 1989, 199, 177–215. [Google Scholar] [CrossRef]
- Pudasaini, S.P. A general two-phase debris flow model. J. Geophys. Res. Earth Surf. 2012, 117, 1–28. [Google Scholar] [CrossRef]
- Denlinger, R.P.; Iverson, R.M. Granular avalanches across irregular three-dimensional terrain: 1. Theory and computation. J. Geophys. Res. Earth Surf. 2004, 109, 1–16. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Mergili, M. A multi-phase mass flow model. J. Geophys. Res. Earth Surf. 2019, 124, 2920–2942. [Google Scholar] [CrossRef] [Green Version]
- Pudasaini, S.P.; Krautblatter, M. The mechanics of landslide mobility with erosion. Nat. Commun. 2021, 12, 6793. [Google Scholar] [CrossRef]
- Pudasaini, S.P.; Fischer, J.-T. A mechanical erosion model for two-phase mass flows. Int. J. Multiph. Flow 2020, 132, 103416. [Google Scholar] [CrossRef]
- Worgull, M. Chapter 3—Molding Materials for Hot Embossing. In Hot Embossing; Worgull, M., Ed.; William Andrew Publishing: Boston, MA, USA, 2009; pp. 57–112. [Google Scholar]
- Zeng, S.; Migórski, S. A class of time-fractional hemivariational inequalities with application to frictional contact problem. Commun. Nonlinear Sci. Numer. Simul. 2018, 56, 34–48. [Google Scholar] [CrossRef]
- Evans, S.; Hungr, O. The assessment of rockfall hazard at the base of talus slopes. Can. Geotech. J. 1993, 30, 620–636. [Google Scholar] [CrossRef]
- Pfeiffer, T.J. Rockfall Hazard Analysis Using Computer Simulation of Rockfalls. Ph.D. Thesis, Colorado School of Mines, Golden, CO, USA, 1989. [Google Scholar]
- Spadari, M.; Kardani, M.; De Carteret, R.; Giacomini, A.; Buzzi, O.; Fityus, S.; Sloan, S. Statistical evaluation of rockfall energy ranges for different geological settings of New South Wales, Australia. Eng. Geol. 2013, 158, 57–65. [Google Scholar] [CrossRef]
- Guzzetti, F.; Crosta, G.; Detti, R.; Agliardi, F. STONE: A computer program for the three-dimensional simulation of rock-falls. Comput. Geosci. 2002, 28, 1079–1093. [Google Scholar] [CrossRef]
- Li, L.; Lan, H. Probabilistic modeling of rockfall trajectories: A review. Bull. Eng. Geol. Environ. 2015, 74, 1163–1176. [Google Scholar] [CrossRef]
- Tskhakaya, D.; Matyash, K.; Schneider, R.; Taccogna, F. The Particle-In-Cell Method. Contrib. Plasma Phys. 2007, 47, 563–594. [Google Scholar] [CrossRef]
- Pastor, M.; Haddad, B.; Sorbino, G.; Cuomo, S.; Drempetic, V. A depth-integrated, coupled SPH model for flow-like landslides and related phenomena. Int. J. Numer. Anal. Methods Geomech. 2009, 33, 143–172. [Google Scholar] [CrossRef]
- Lin, C.; Pastor, M.; Li, T.; Liu, X.; Qi, H.; Lin, C. A SPH two-layer depth-integrated model for landslide-generated waves in reservoirs: Application to Halaowo in Jinsha River (China). Landslides 2019, 16, 2167–2185. [Google Scholar] [CrossRef]
- Longo, A.; Pastor, M.; Sanavia, L.; Manzanal, D.; Martin Stickle, M.; Lin, C.; Yague, A.; Tayyebi, S.M. A depth average SPH model including μ (I) rheology and crushing for rock avalanches. Int. J. Numer. Anal. Methods Geomech. 2019, 43, 833–857. [Google Scholar] [CrossRef]
- Agliardi, F.; Crosta, G.B. High resolution three-dimensional numerical modelling of rockfalls. Int. J. Rock Mech. Min. Sci. 2003, 40, 455–471. [Google Scholar] [CrossRef]
- Woltjer, M.; Rammer, W.; Brauner, M.; Seidl, R.; Mohren, G.; Lexer, M. Coupling a 3D patch model and a rockfall module to assess rockfall protection in mountain forests. J. Environ. Manag. 2008, 87, 373–388. [Google Scholar] [CrossRef]
- Bartelt, P.; Bieler, C.; Bühler, Y.; Christen, M.; Christen, M.; Dreier, L.; Gerber, W.; Glover, J.; Schneider, M.; Glocker, C. RAMMS: Rockfall User Manual v1. 6; WSL Institute for Snow and Avalanche Research SLF: Davos, Switzerland, 2016. [Google Scholar]
- Matas, G.; Lantada, N.; Corominas, J.; Gili, J.; Ruiz-Carulla, R.; Prades, A. RockGIS: A GIS-based model for the analysis of fragmentation in rockfalls. Landslides 2017, 14, 1565–1578. [Google Scholar] [CrossRef] [Green Version]
- Christen, M.; Kowalski, J.; Bartelt, P. RAMMS: Numerical simulation of dense snow avalanches in three-dimensional terrain. Cold Reg. Sci. Technol. 2010, 63, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Molinari, M.E.; Cannata, M.; Begueria, S.; Ambrosi, C. GIS-based Calibration of MassMov2D. Trans. GIS 2012, 16, 215–231. [Google Scholar] [CrossRef] [Green Version]
- Wu, Y.; Lan, H. Landslide Analyst—A landslide propagation model considering block size heterogeneity. Landslides 2019, 16, 1107–1120. [Google Scholar] [CrossRef]
- de’Michieli Vitturi, M.; Esposti Ongaro, T.; Lari, G.; Aravena, A. IMEX_SfloW2D 1.0: A depth-averaged numerical flow model for pyroclastic avalanches. Geosci. Model Dev. 2019, 12, 581–595. [Google Scholar] [CrossRef] [Green Version]
- Berger, M.J.; George, D.L.; LeVeque, R.J.; Mandli, K.T. The GeoClaw software for depth-averaged flows with adaptive refinement. Adv. Water Resour. 2011, 34, 1195–1206. [Google Scholar] [CrossRef] [Green Version]
- Hungr, O.; McDougall, S. Two numerical models for landslide dynamic analysis. Comput. Geosci. 2009, 35, 978–992. [Google Scholar] [CrossRef]
- Amicarelli, A.; Manenti, S.; Albano, R.; Agate, G.; Paggi, M.; Longoni, L.; Mirauda, D.; Ziane, L.; Viccione, G.; Todeschini, S. SPHERA v. 9.0. 0: A Computational Fluid Dynamics research code, based on the Smoothed Particle Hydrodynamics mesh-less method. Comput. Phys. Commun. 2020, 250, 107157. [Google Scholar] [CrossRef]
- Li, X.; Tang, X.; Zhao, S.; Yan, Q.; Wu, Y. MPM evaluation of the dynamic runout process of the giant Daguangbao landslide. Landslides 2021, 18, 1509–1518. [Google Scholar] [CrossRef]
- Crosta, G.; Imposimato, S.; Roddeman, D. Numerical modelling of entrainment/deposition in rock and debris-avalanches. Eng. Geol. 2009, 109, 135–145. [Google Scholar] [CrossRef]
- Jasak, H.; Jemcov, A.; Tukovic, Z. OpenFOAM: A C++ library for complex physics simulations. In Proceedings of the International Workshop on Coupled Methods in Numerical Dynamics, Dubrovnik, Croatia, 19–21 September 2007; pp. 1–20. [Google Scholar]
- Ramachandran, P. PySPH: A reproducible and high-performance framework for smoothed particle hydrodynamics. In Proceedings of the 15th Python in Science Conference, Austin, TX, USA, 11–17 July 2016; pp. 127–135. [Google Scholar]
- Wang, J.-S.; Ni, H.-G.; He, Y.-S. Finite-difference TVD scheme for computation of dam-break problems. J. Hydraul. Eng. 2000, 126, 253–262. [Google Scholar] [CrossRef]
- Ming, H.T.; Chu, C.R. Two-dimensional shallow water flows simulation using TVD-MacCormack scheme. J. Hydraul. Res. 2000, 38, 123–131. [Google Scholar] [CrossRef]
- Delaney, K.B.; Evans, S.G. The 2000 Yigong landslide (Tibetan Plateau), rockslide-dammed lake and outburst flood: Review, remote sensing analysis, and process modelling. Geomorphology 2015, 246, 377–393. [Google Scholar] [CrossRef]
- Guo, C.; Montgomery, D.R.; Zhang, Y.; Zhong, N.; Fan, C.; Wu, R.; Yang, Z.; Ding, Y.; Jin, J.; Yan, Y. Evidence for repeated failure of the giant Yigong landslide on the edge of the Tibetan Plateau. Sci. Rep. 2020, 10, 14371. [Google Scholar] [CrossRef]
- Kang, C. Modelling Entrainment in Debris Flow Analysis for Dry Granular Material. Int. J. Geomech. 2016, 17, 04017087. [Google Scholar] [CrossRef]
- Zhuang, Y.; Yin, Y.; Xing, A.; Jin, K. Combined numerical investigation of the Yigong rock slide-debris avalanche and subsequent dam-break flood propagation in Tibet, China. Landslides 2020, 17, 2217–2229. [Google Scholar] [CrossRef]
- Voellmy, A. Die Zerstorungs-Kraft von lawinen, Sonderdruck aus der Schweiz. Bauzeitung 1955, 73, 159–165. [Google Scholar]
- Morgenstern, N.R. The evaluation of slope stability—A 25 year perspective. In Proceedings of the Stability and Performance of Slopes and Embankments II, Berkeley, CA, USA, 29 June–1 July 1992; pp. 1–26. [Google Scholar]
- Leroueil, S.; Locat, J.; Vaunat, J.; Picarelli, L.; Lee, H. Geotechnical characterization of slope movements. In Proceedings of the Landslides, Trondheim, Norway, 17–21 June 1996; pp. 53–74. [Google Scholar]
- Bates, R.L.; Jackson, J.A. Dictionary of Geological Terms; Anchor Books: New York, NY, USA, 1984; Volume 584. [Google Scholar]
- Ruiz-Carulla, R.; Corominas, J.; Mavrouli, O. A fractal fragmentation model for rockfalls. Landslides 2017, 14, 875–889. [Google Scholar] [CrossRef]
- Davies, T.; McSaveney, M.; Hodgson, K. A fragmentation-spreading model for long-runout rock avalanches. Can. Geotech. J. 1999, 36, 1096–1110. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Software | Scheme | Platform | Format |
|---|---|---|---|
| STONE [45] | Lumped mass | ASCII | |
| Hy-STONE [51] | Hybrid | ASCII | |
| Rockfall Analyst [9] | Lumped mass | ArcGIS | All raster format |
| Rockyfor3D [11] | Hybrid | ASCII | |
| PICUS Rock’n’Roll [52] | Hybrid | PICUS | |
| RAMMS::ROCKFALL [53] | Rigid body | ASCII | |
| RockGIS [54] | Lumped mass | ASCII |
| Software | Description | Scheme | Format | Platform |
|---|---|---|---|---|
| r.avaflow [14] | Eulerian | NOC | All raster format | GRASS |
| RAMMS [55] | Eulerian | 1st/2nd order | ASCII, Geotiff | |
| Massflow [12] | Eulerian | TVD–MacCormack | ASCII | |
| Massmov2D [56] | Eulerian | 2-step scheme | PCRaster | PCRaster |
| LA and DA [31,57] | Eulerian–Lagrangian | PIC-like | GeoTIFF | |
| Titan2D [15] | Eulerian | AMR | All raster format | GRASS |
| IMEX_SfloW2D [58] | Eulerian | Semi-discrete central scheme | ASCII | |
| Geo-Claw [59] | Eulerian | AMR | ASCII, NetCDF | |
| FLO-2D [13] | Eulerian | 1st order | All raster format | QGIS |
| DAN3D [60] | Lagrangian | SPH | ASCII | |
| SPHERA [61] | Lagrangian | SPH | All raster format | QGIS |
| Parameters | Values |
|---|---|
| Basal friction angle | 12° |
| Internal friction angle | 13° |
| Turbulent coefficient | 1000 |
| Motion | Rock | Earth | Debris |
|---|---|---|---|
| Falling and toppling | Force: collision, friction Motion: Lagrangian | Force: collision, friction Motion: Eulerian | Force: collision, friction Motion: Eulerian/Lagrangian |
| Sliding, spreading, and flowing | Force: dry friction and viscosity Motion: Lagrangian or Eulerian | Force: dry friction and viscosity Motion: Eulerian | Force: dry friction and viscosity Motion: Eulerian/Lagrangian |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.; Tian, A.; Lan, H. Comparisons of Dynamic Landslide Models on GIS Platforms. Appl. Sci. 2022, 12, 3093. https://doi.org/10.3390/app12063093
Wu Y, Tian A, Lan H. Comparisons of Dynamic Landslide Models on GIS Platforms. Applied Sciences. 2022; 12(6):3093. https://doi.org/10.3390/app12063093
Chicago/Turabian StyleWu, Yuming, Aohua Tian, and Hengxing Lan. 2022. "Comparisons of Dynamic Landslide Models on GIS Platforms" Applied Sciences 12, no. 6: 3093. https://doi.org/10.3390/app12063093
APA StyleWu, Y., Tian, A., & Lan, H. (2022). Comparisons of Dynamic Landslide Models on GIS Platforms. Applied Sciences, 12(6), 3093. https://doi.org/10.3390/app12063093