
Robust Adaptive Path Following Control Strategy for Underactuated Unmanned Surface Vehicles with Model Deviation and Actuator Saturation




Abstract
:1. Introduction
- 1
- Considering the practical application requirements of path following control, some practical problems encountered in the process of vessel motion are taken into consideration, For instance, these problems include unknown external time-varying disturbances, deviation of vehicle model parameters and actuator saturation. The above problems are solved by disturbance observers, neural networks and auxiliary dynamic systems, respectively.
- 2
- For the sake of reducing the complexity of the control policy, the following two measures are taken in this paper. (1) The higher-order tracking differentiator (TDS) is introduced into the backstepping controller, which reduces the number of derivations in the backstepping controller and overcomes the issue of complex calculation of the controller. (2) The single-parameter approximation strategy is used to approximate the vehicle model. Because the single-parameter neural network only needs to adjust one parameter online, the complexity and amount of calculation of the controller are effectively reduced compared with Paper [16].
- 3
- The rapidity of the control system is taken into account. (1) FCDO is devised to approach the external time-varying disturbance, which effectively speeds up the convergence speed of the proposed scheme. (2) A finite-time auxiliary dynamic system is adopted for the actuator saturation issue to further accelerate the convergence speed of the control system compared with Paper [17].
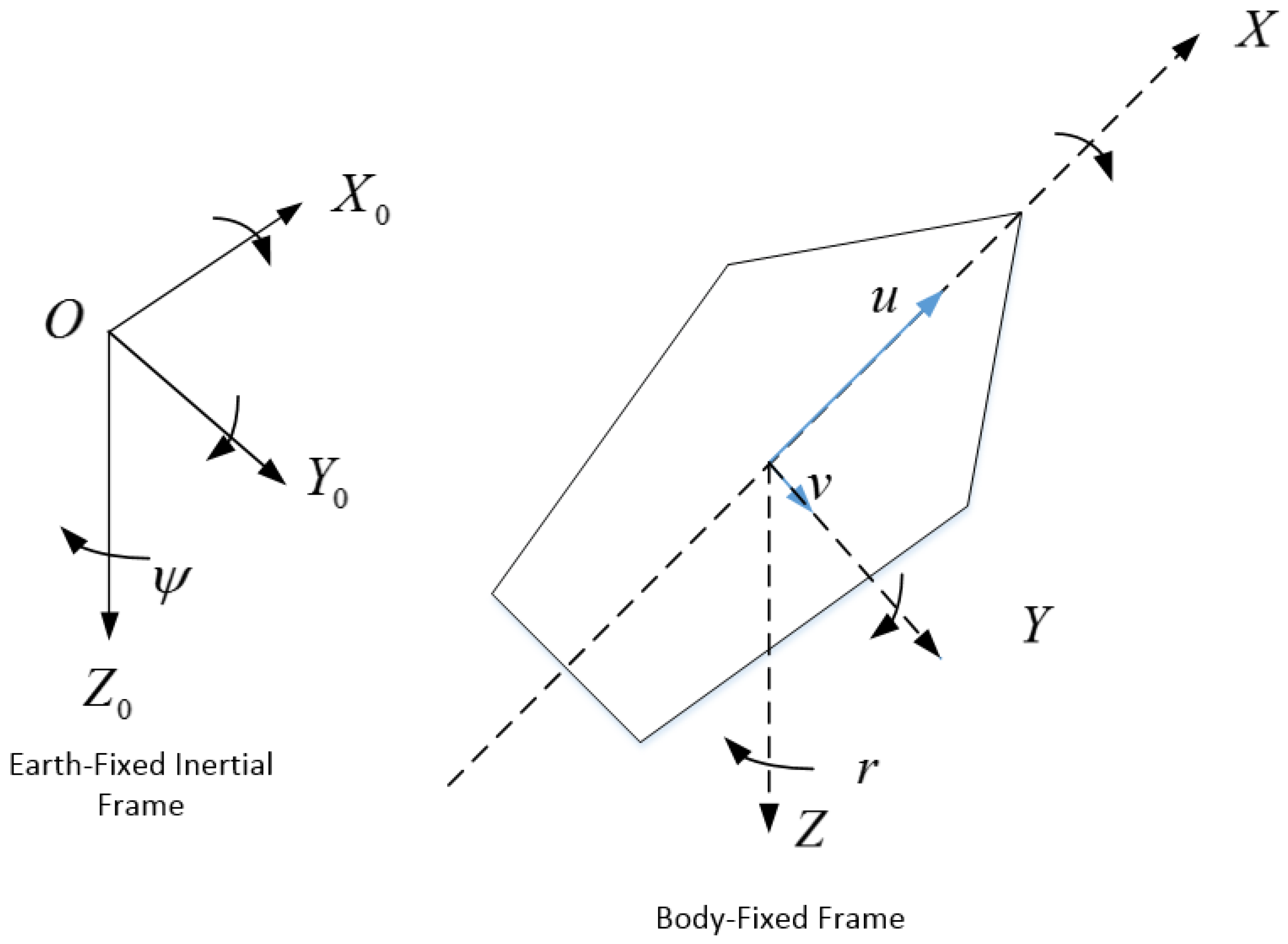
2. Problem Formulation
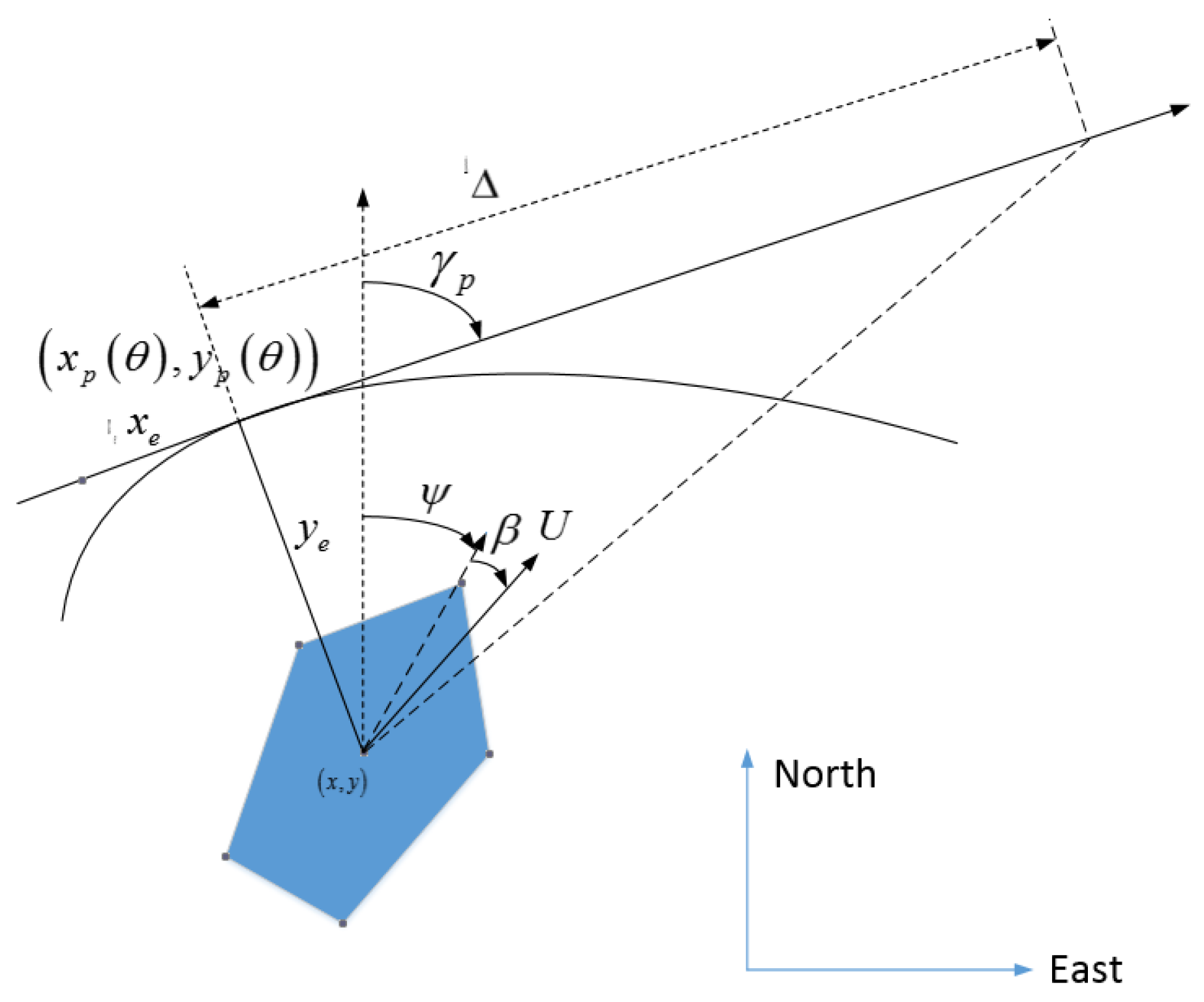
3. LOS Guidance Algorithms
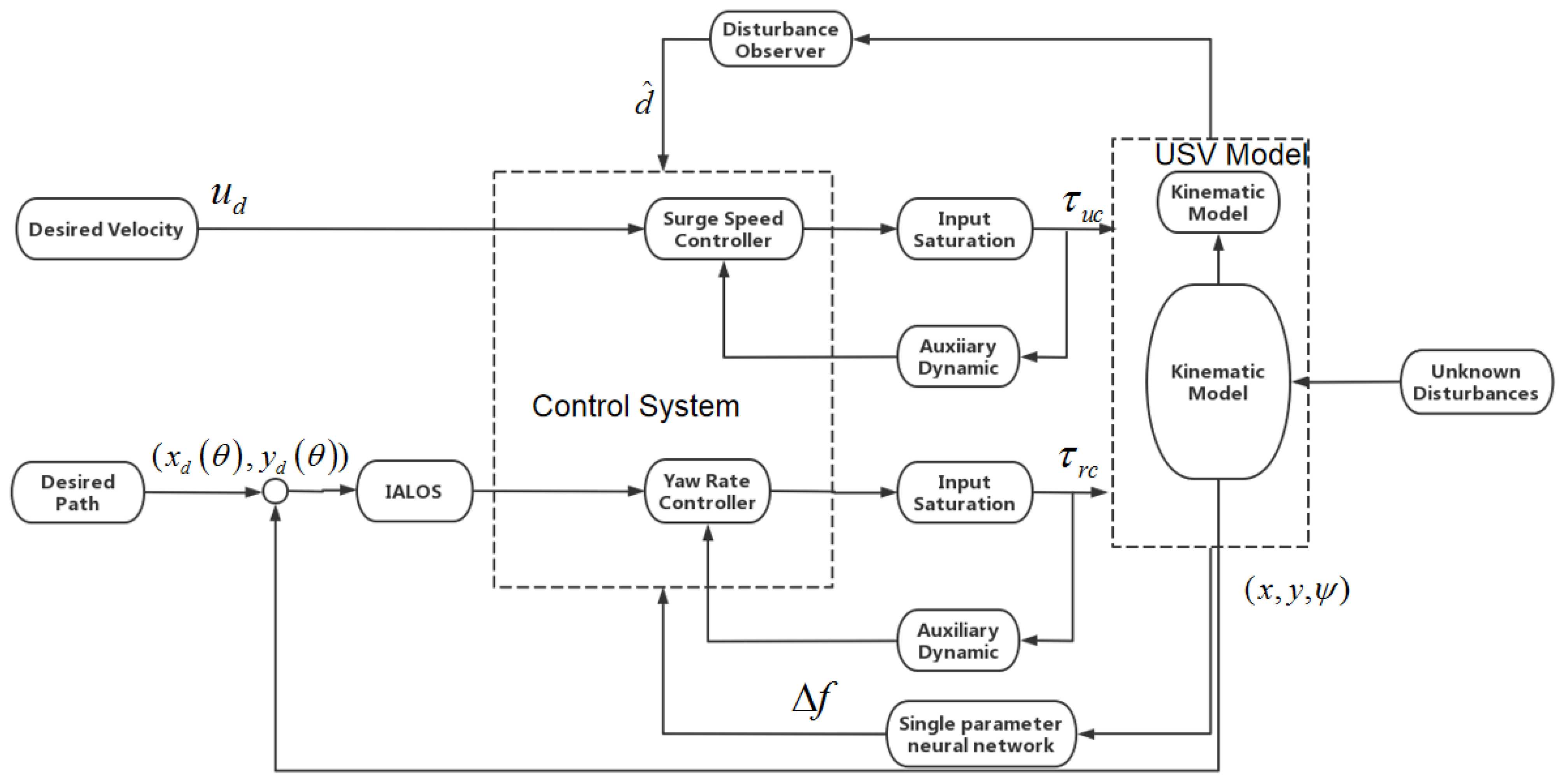
4. Control System Design
4.1. Finite-Time Convergent Disturbance Observer Design
4.2. Yaw Rate Controller
4.3. Surge Speed Controller
5. Stability Analysis
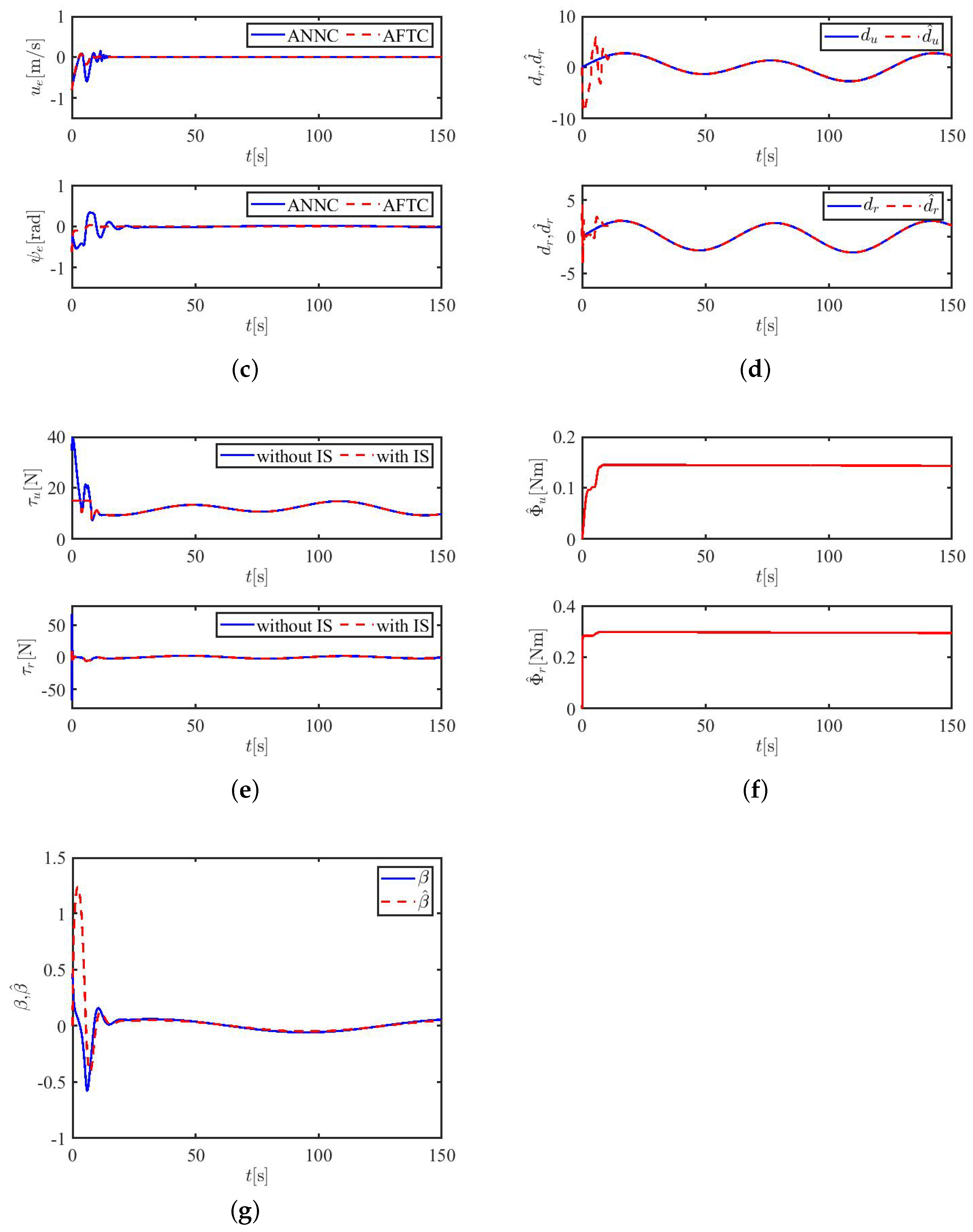
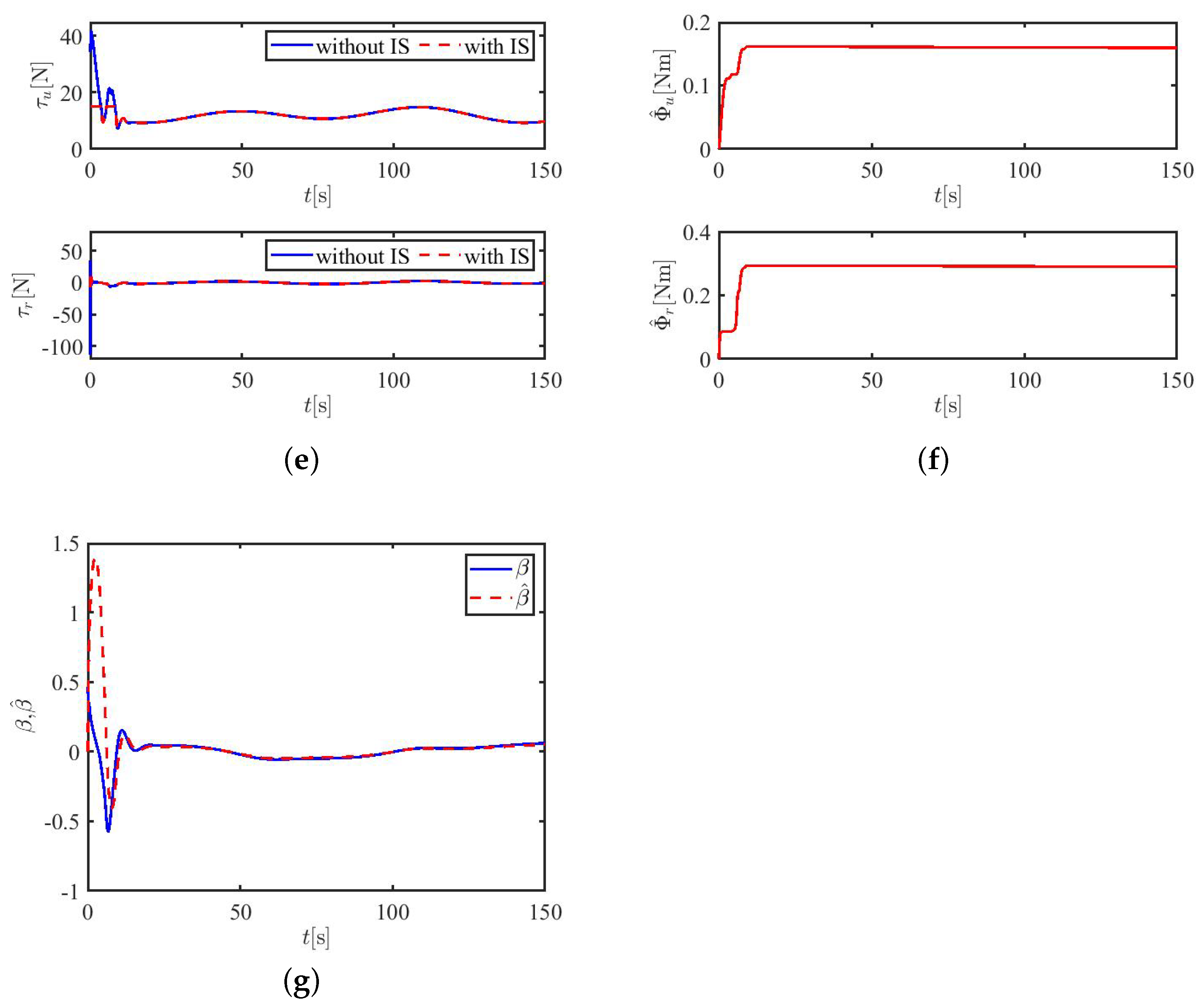
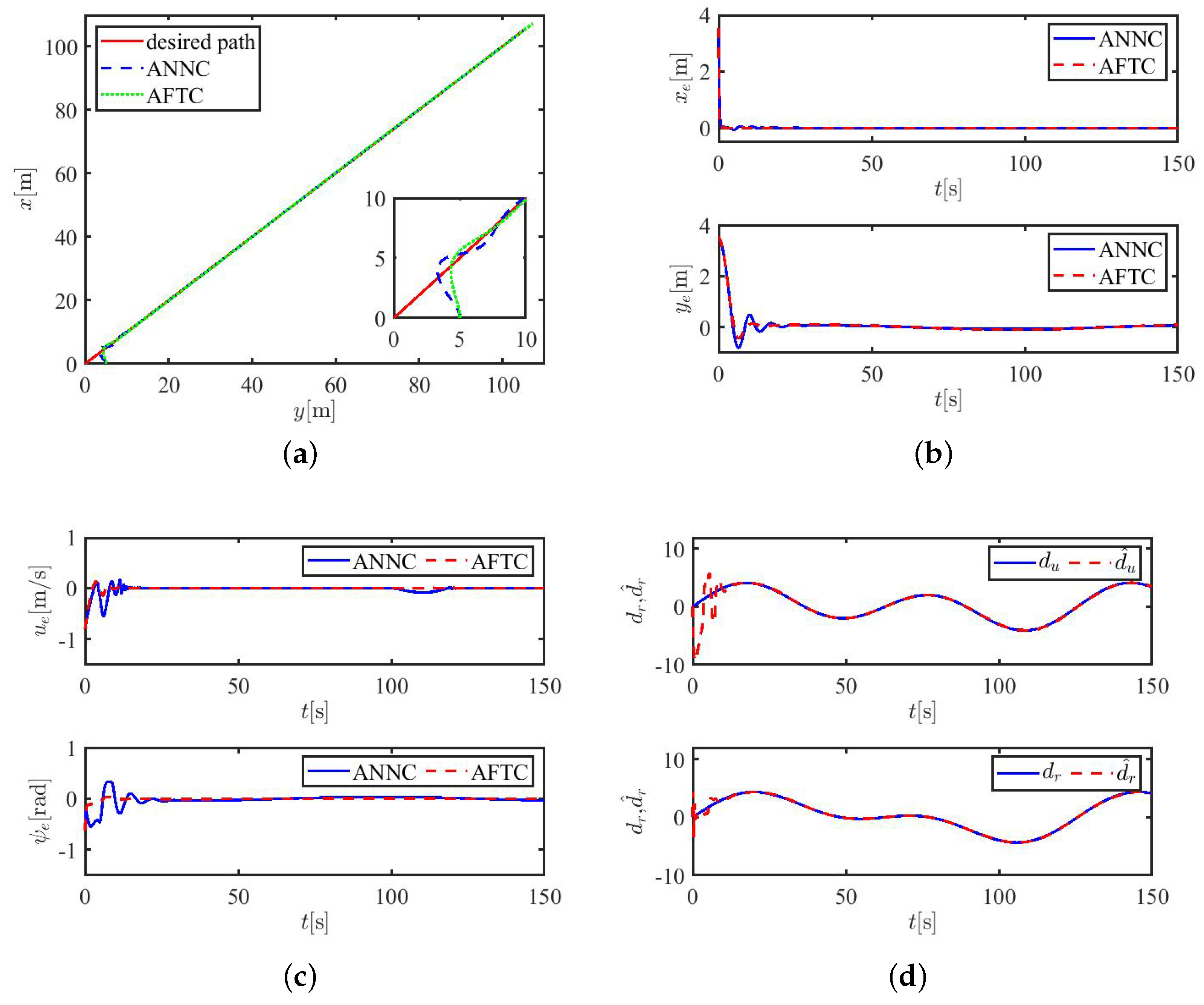
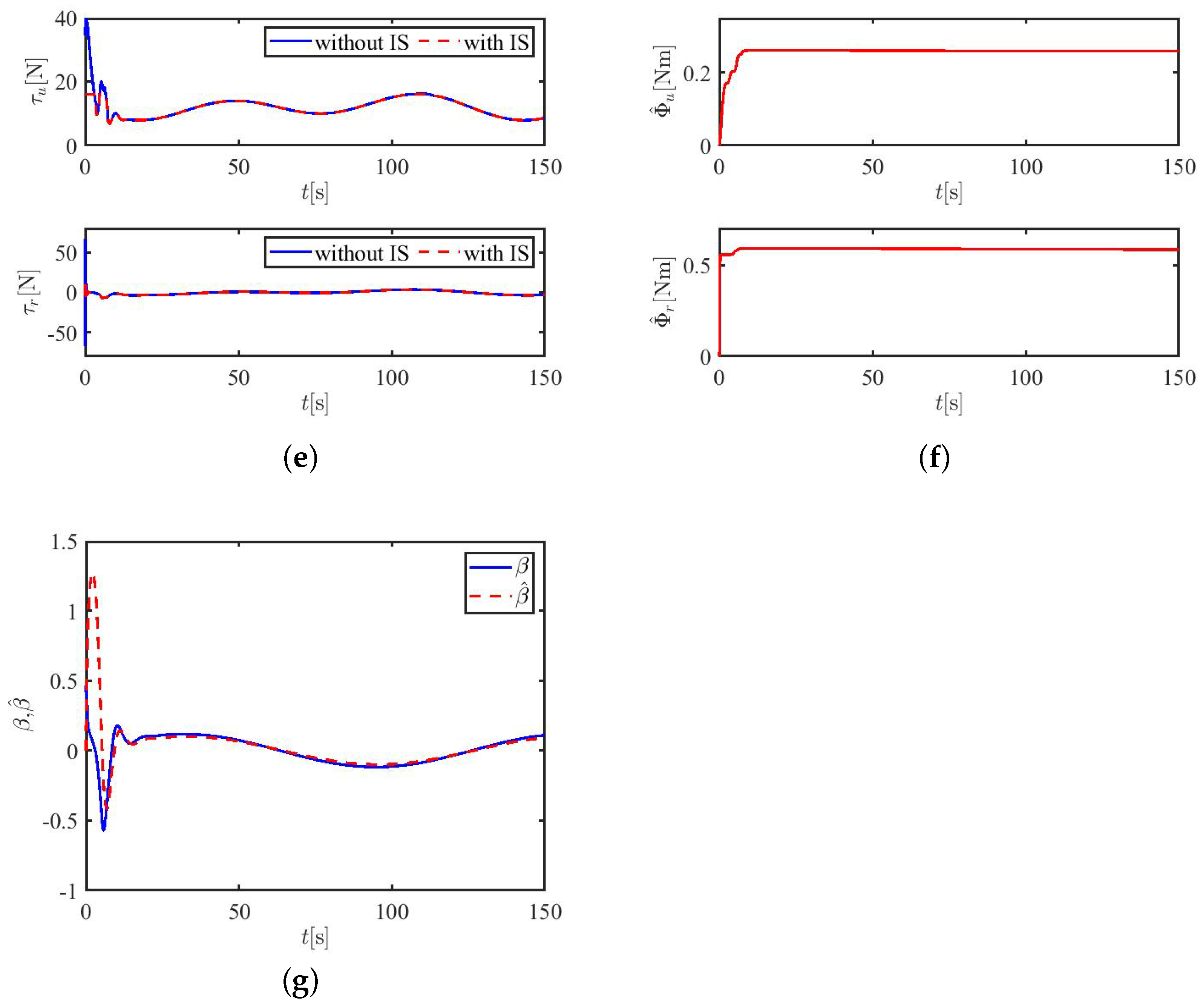
6. Numerical Simulations
6.1. Path following under Weak Interference
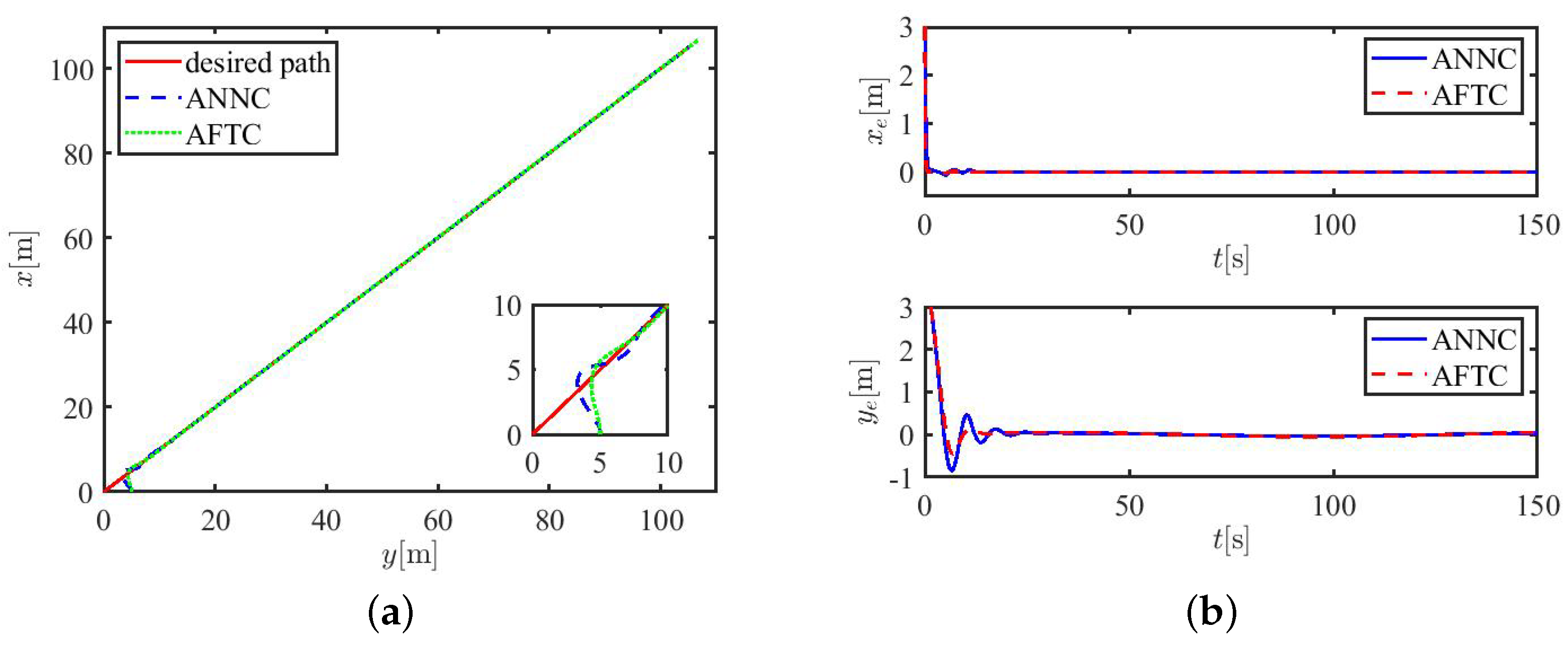
6.1.1. Straight-Line Path following under Weak Interference
6.1.2. Curve Path following under Weak Interference
6.2. Following under Strong Interference
6.2.1. Straight-Line Path Following under Strong Interference
6.2.2. Curve Path Following under Strong Interference
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| USV | unmanned surface vehicle |
| LOS | line-of-sight |
| ALOS | adaptive line-of-sight |
| PLOS | predictor-based line-of-sight |
| IALOS | improved adaptive integral line-of-sight |
| SMC | sliding mode control |
| TDS | the higher-order tracking differentiator |
| DSC | dynamic surface control |
| MPC | model predictive control |
| MLP | minimal learning parameter |
| FCDO | finite-time disturbance observer |
| ANNC | adaptive neural network control |
| AFTC | adaptive finite-time control |
References
- Mu, D.; Wang, G.; Fan, Y.; Qiu, B.; Sun, X. Adaptive Course Control based on Trajectory Control for Unmanned surface Vehicle with Unmodeled Dynamics and Input Saturation. Neurocomputing 2018, 303, 1–10. [Google Scholar] [CrossRef]
- Park, B.S.; Yoo, S.J. Robust fault–tolerant tracking with predefined performance for underactuated surface vessels. Ocean Eng. 2016, 115, 159–167. [Google Scholar] [CrossRef]
- Wang, N.; Er, M.J.; Sun, J.C.; Liu, Y.C. Adaptive Robust Online Constructive Fuzzy Control of a Complex Surface Vehicle System. IEEE Trans. Cybern. 2015, 46, 1511–1523. [Google Scholar] [CrossRef]
- Lu, Y.; Zhang, G.; Qiao, L.; Zhang, W. Adaptive output-feedback formation control for underactuated surface vessels. Int. J. Control 2020, 93, 400–409. [Google Scholar] [CrossRef]
- Qiu, B.; Wang, G.; Fan, Y. Predictor LOS-based trajectory linearization control for path following of underactuated unmanned surface vehicle with input saturation. Ocean Eng. 2020, 214, 107874. [Google Scholar] [CrossRef]
- Miao, J.; Wang, S.; Tomovic, M.M.; Zhao, Z. Compound line-of-sight nonlinear path following control of underactuated marine vehicles exposed to wind, waves, and ocean currents. Nonlinear Dyn. 2017, 89, 2441–2459. [Google Scholar] [CrossRef]
- Mu, D.; Wang, G.; Fan, Y.; Bai, Y.; Zhao, Y. Path following for podded propulsion unmanned surface vehicle: Theory, simulation and experiment. IEEJ Trans. Electr. Electron. Eng. 2018, 13, 911–923. [Google Scholar] [CrossRef]
- Fossen, T.I.; Pettersen, K.Y. On uniform semiglobal exponential stability (usges) of proportional line-of-sight guidance laws. Automatica 2014, 50, 2912–2917. [Google Scholar] [CrossRef] [Green Version]
- Borhaug, E.; Pavlov, A.; Pettersen, K.Y. Integral LOS control for path following of underactuated marine surface vessels in the presence of constant ocean currents. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008. [Google Scholar]
- Lekkas, A.M.; Fossen, T.I. Integral LOS Path Following for Curved Paths Based on a Monotone Cubic Hermite Spline Parametrization. IEEE Trans. Control Syst. Technol. 2014, 22, 2287–2301. [Google Scholar] [CrossRef]
- Caharija, W.; Pettersen, K.Y.; Bibuli, M.; Calado, P.; Zereik, E.; Braga, J.; Gravdahl, J.T.; Sørensen, A.J.; Milovanović, M.; Bruzzone, G. Integral Line-of-Sight Guidance and Control of Underactuated Marine Vehicles: Theory, Simulations, and Experiments. IEEE Trans. Control Syst. Technol. 2016, 24, 1623–1642. [Google Scholar] [CrossRef] [Green Version]
- Fossen, T.I.; Pettersen, K.Y.; Galeazzi, R. Line-of-Sight Path Following for Dubins Paths with Adaptive Sideslip Compensation of Drift Forces. IEEE Trans. Control Syst. Technol. 2015, 23, 820–827. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Z.; Sun, L. Path following control for marine surface vessel with uncertainties and input saturation. Neurocomputing 2016, 177, 158–167. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z.; Wang, H. Predictor-based LOS guidance law for path following of underactuated marine surface vehicles with sideslip compensation. Ocean Eng. 2016, 124, 340–348. [Google Scholar] [CrossRef]
- Liu, L.; Wang, D.; Peng, Z. ESO-Based Line-of-Sight Guidance Law for Path Following of Underactuated Marine Surface Vehicles With Exact Sideslip Compensation. IEEE J. Ocean. Eng. 2016, 42, 477–487. [Google Scholar] [CrossRef]
- Nie, J.; Lin, X. Improved Adaptive integral Line-of-Sight Guidance Law and Nonlinear Adaptive Fuzzy Path Following control for Underactuated MSV. ISA Trans. 2019, 94, 151–163. [Google Scholar] [CrossRef]
- Fan, Y.; Huang, H.; Tan, Y. Robust Adaptive Path Following Control of an Unmanned Surface Vessel Subject to Input Saturation and Uncertainties. Appl. Sci. 2019, 9, 1815. [Google Scholar] [CrossRef] [Green Version]
- Xia, R.; Chen, M.; Wu, Q.; Wang, Y. Neural network based integral sliding mode optimal flight control of near space hypersonic vehicle. Neurocomputing 2019, 379, 41–52. [Google Scholar] [CrossRef]
- Do, K.D. Global robust adaptive path-tracking control of underactuated ships under stochastic disturbances. Ocean. Eng. 2016, 111, 267–278. [Google Scholar] [CrossRef]
- Ashrafiuon, H.; Muske, K.R.; McNinch, L.C.; Soltan, R.A. Sliding-Mode Tracking Control of Surface Vessels. IEEE Trans. Ind. Electron. 2008, 55, 4004–4012. [Google Scholar] [CrossRef]
- Fan, Y.; Liu, B.; Wang, G.; Mu, D. Adaptive Fast Non-Singular Terminal Sliding Mode Path Following Control for an Underactuated Unmanned Surface Vehicle with Uncertainties and Unknown Disturbances. Sensors 2021, 21, 7454. [Google Scholar] [CrossRef]
- Zheng, Z.; Feroskhan, M. Path Following of a Surface Vessel with Prescribed Performance in the Presence of Input Saturation and External Disturbances. IEEE/ASME Trans. Mechatron. 2017, 22, 2564–2575. [Google Scholar] [CrossRef]
- Mu, D.D.; Wang, G.F.; Fan, Y.S. Tracking control of Podded Propulsion Unmanned Surface Vehicle with Unknow Dynamics and Disturbance Under Input Saturation. Int. J. Control Autom. Syst. 2018, 16, 1905–1915. [Google Scholar] [CrossRef]
- Fu, M.; Wang, L. Disturbance Observer Based Path Following Control of Unmanned Surface Vessel with Time-varying Current. In Proceedings of the 38th Chinese Control Conference, Guangzhou, China, 27–30 July 2019. [Google Scholar]
- Lu, Y.; Zhang, G.; Qiao, L.; Zhang, W. Robust adaptive formation control for underactuated surface autonomous vessels based on MLP and DOB. Nonlinear Dyn. 2018, 94, 503–519. [Google Scholar] [CrossRef]
- Zhang, G.; Zhang, X. Concise robust adaptive path following control of underactuated ships using DSC and MLP. IEEE J. Ocean. Eng. 2014, 39, 684–694. [Google Scholar] [CrossRef]
- Dai, S.; Wang, M.; Wang, C. Neural learning control of marine surface vessels with guaranteed transient tracking performance. IEEE Trans. Ind. Electron. 2016, 63, 1717–1727. [Google Scholar] [CrossRef]
- Pan, C.Z.; Lai, X.Z.; Yang, S.X.; Wu, M. An efficient neural network aprroach to tracking control of an autonomous surface vehicle with unknown dynamics. Expert Syst. Appl. 2013, 40, 1629–1635. [Google Scholar] [CrossRef]
- Zhu, G.; Ma, Y.; Hu, S. Single-parameter-learning-based finite-time tracking control of underactuated MSVs under input saturation. Control Eng. Pract. 2020, 105, 104652. [Google Scholar] [CrossRef]
- Wischnewski, A.; Betz, J.; Lohmann, B. Real-Time Learning of Non-Gaussian Uncertainty Models for Autonomous Racing. In Proceedings of the 2020 59th IEEE Conference on Decision and Control (CDC), Jeju, Korea, 14–18 December 2020; pp. 609–615. [Google Scholar] [CrossRef]
- Wischnewski, A.; Betz, J.; Lohmann, B. A Model-Free Algorithm to Safely Approach the Handling Limit of an Autonomous Racecar. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019. [Google Scholar] [CrossRef]
- Rosolia, U.; Carvalho, A.; Borrelli, F. Autonomous racing using learning model predictive control American Control. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 5115–5120. [Google Scholar]
- Rosolia, U.; Borrelli, F. Learning Model Predictive Control for Iterative Tasks: A Computationally Efficient Approach for Linear System. IFAC-PapersOnLine 2017, 50, 3142–3147. [Google Scholar] [CrossRef]
- Borrelli, F.; Falcone, P.; Keviczky, T.; Asgari, J.; Hrovat, D. MPC-based approach to active steering for autonomous vehicle systems. Int. J. Veh. Auto Syst. 2005, 3, 265–291. [Google Scholar] [CrossRef]
- Fossen, T.I. Marine Control Systems: Guidance, Navigation and Control of Ships, Rigs and Underwater Vehicles. In Marine Cybernetics; Springer: Trondheim, Norway, 2002. [Google Scholar]
- Li, J.-H.; Lee, P.-M.; Jun, B.-H.; Lim, Y.-K. Point-to-point navigation of underactuated ships. Automatica 2008, 44, 3201–3205. [Google Scholar] [CrossRef]
- Du, H.; Qian, C.; Frye, M.T.; Li, S. Global finite-time stabilisationusing bounded feedback for a class of nonlinear systems. IET Control Theory Appl. 2012, 6, 2326–2336. [Google Scholar] [CrossRef]
- Liang, K.; Lin, X.; Chen, Y.; Li, J.; Ding, F. Adaptive sliding mode output feedback control for dynamic positioning ships with input saturation. Ocean Eng. 2020, 206, 107245. [Google Scholar] [CrossRef]
- Skjetne, R.; Fossen, T.I.; Kokotović, P.V. Adaptive maneuvering, with experiments, for a model ship in a marine control laboratory. Automatica 2005, 41, 289–298. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Performance Indicator | AFTC | ANNC |
|---|---|---|
| IEA | 0.36 | 0.848 |
| IEA | 8.74 | 10.2 |
| Performance Indicator | AFTC | ANNC |
|---|---|---|
| IEA | 0.29 | 0.719 |
| IEA | 12.1 | 13.8 |
| Performance Indicator | AFTC | ANNC |
|---|---|---|
| IEA | 0.450 | 0.926 |
| IEA | 9.17 | 13.3 |
| Performance Indicator | AFTC | ANNC |
|---|---|---|
| IEA() | 0.36 | 0.848 |
| IEA() | 8.74 | 10.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, Y.; Zou, X.; Wang, G.; Mu, D. Robust Adaptive Path Following Control Strategy for Underactuated Unmanned Surface Vehicles with Model Deviation and Actuator Saturation. Appl. Sci. 2022, 12, 2696. https://doi.org/10.3390/app12052696
Fan Y, Zou X, Wang G, Mu D. Robust Adaptive Path Following Control Strategy for Underactuated Unmanned Surface Vehicles with Model Deviation and Actuator Saturation. Applied Sciences. 2022; 12(5):2696. https://doi.org/10.3390/app12052696
Chicago/Turabian StyleFan, Yunsheng, Xinpeng Zou, Guofeng Wang, and Dongdong Mu. 2022. "Robust Adaptive Path Following Control Strategy for Underactuated Unmanned Surface Vehicles with Model Deviation and Actuator Saturation" Applied Sciences 12, no. 5: 2696. https://doi.org/10.3390/app12052696
APA StyleFan, Y., Zou, X., Wang, G., & Mu, D. (2022). Robust Adaptive Path Following Control Strategy for Underactuated Unmanned Surface Vehicles with Model Deviation and Actuator Saturation. Applied Sciences, 12(5), 2696. https://doi.org/10.3390/app12052696