
Application of the Theory of Planned Behavior in Autonomous Vehicle-Pedestrian Interaction

 ,
,  ,
,
Abstract
:1. Introduction
2. Related Work
3. Theoretical Framework
4. Methodology
4.1. Survey Description
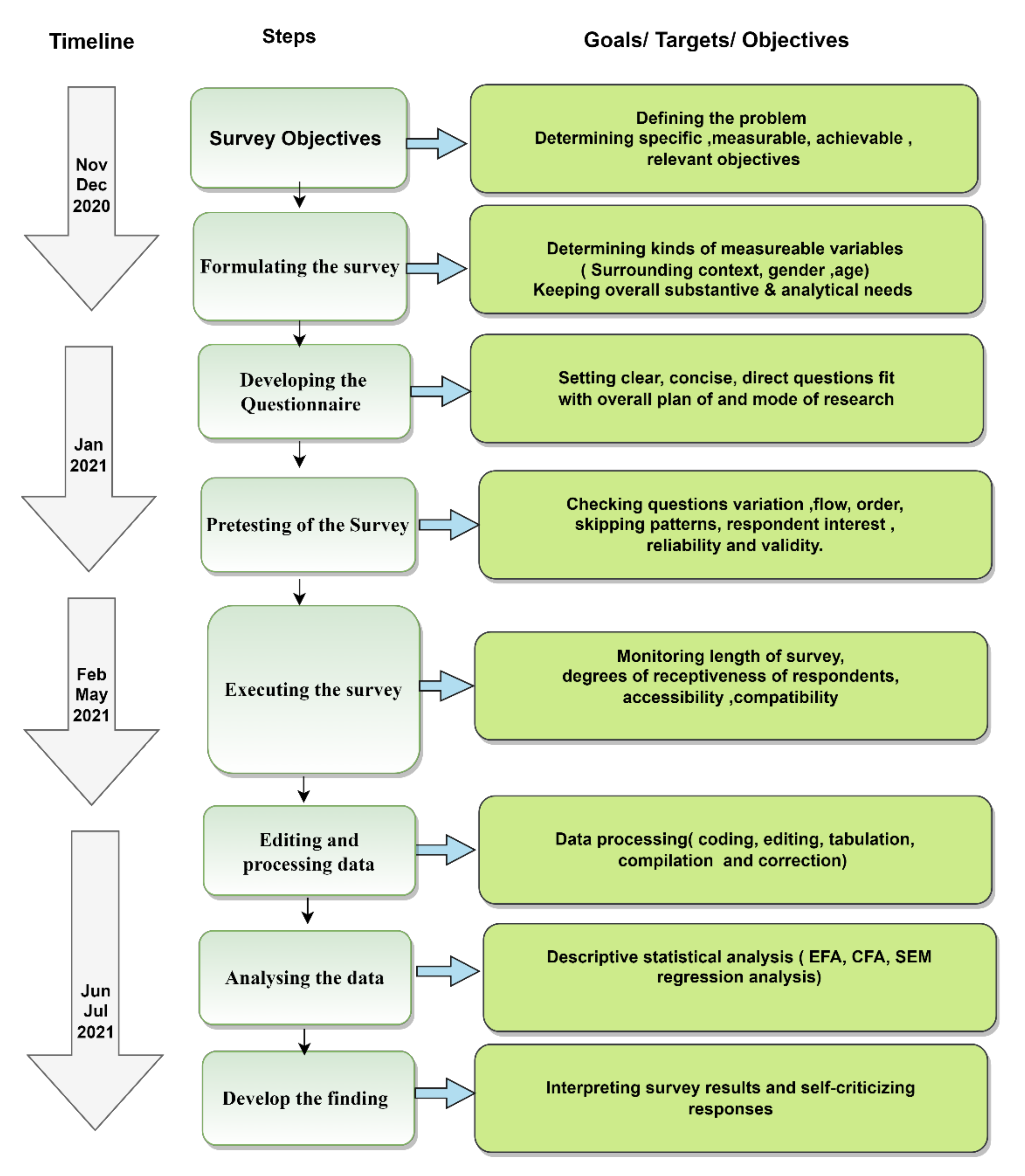
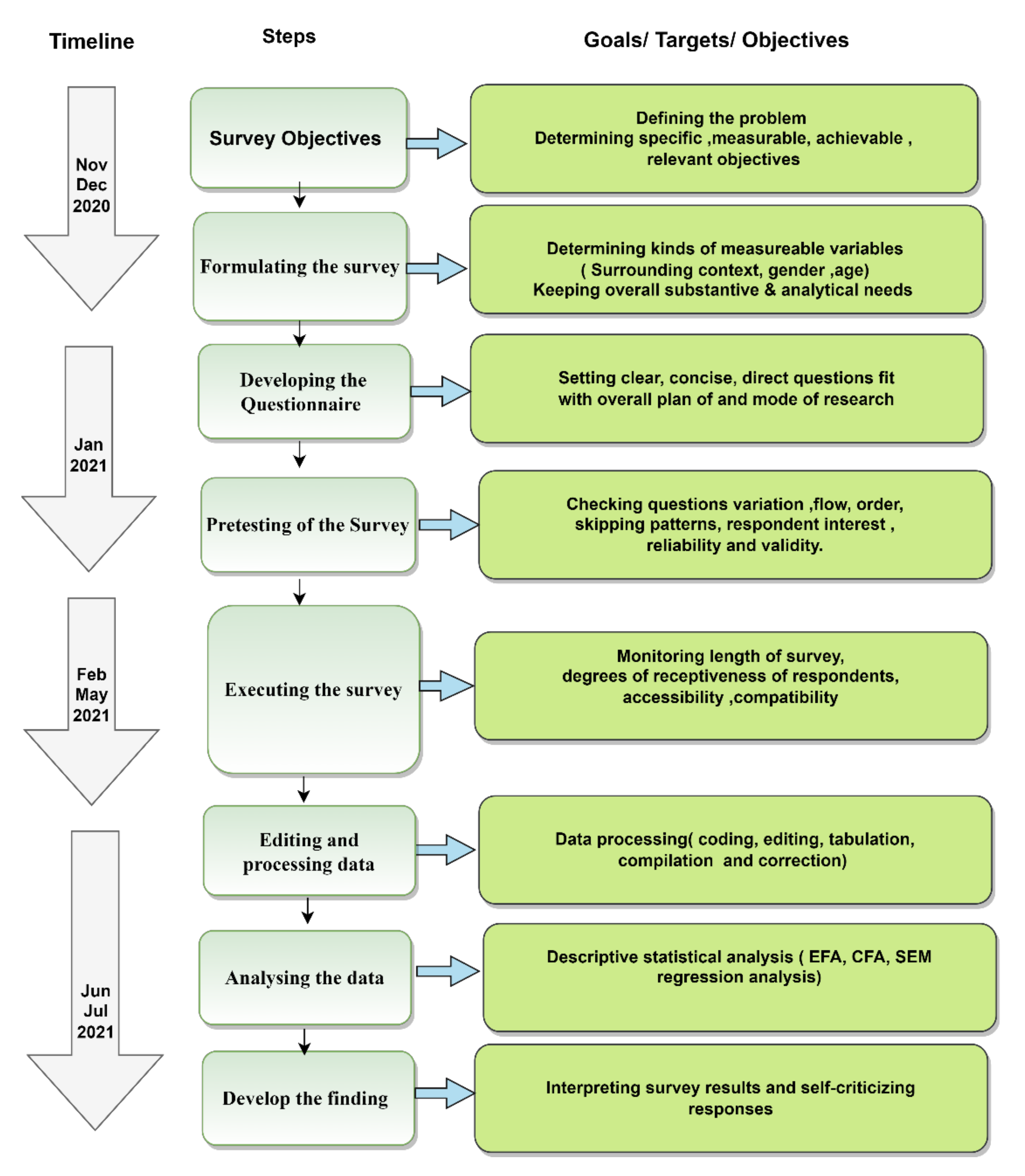
4.2. Survey Timeline/Survey Phases
5. Data Analysis and Results
5.1. Survey Participants
5.2. Exploratory Factor Analysis (EFA)
5.3. Confirmatory Factor Analysis
5.4. Assessment of Measurement Model
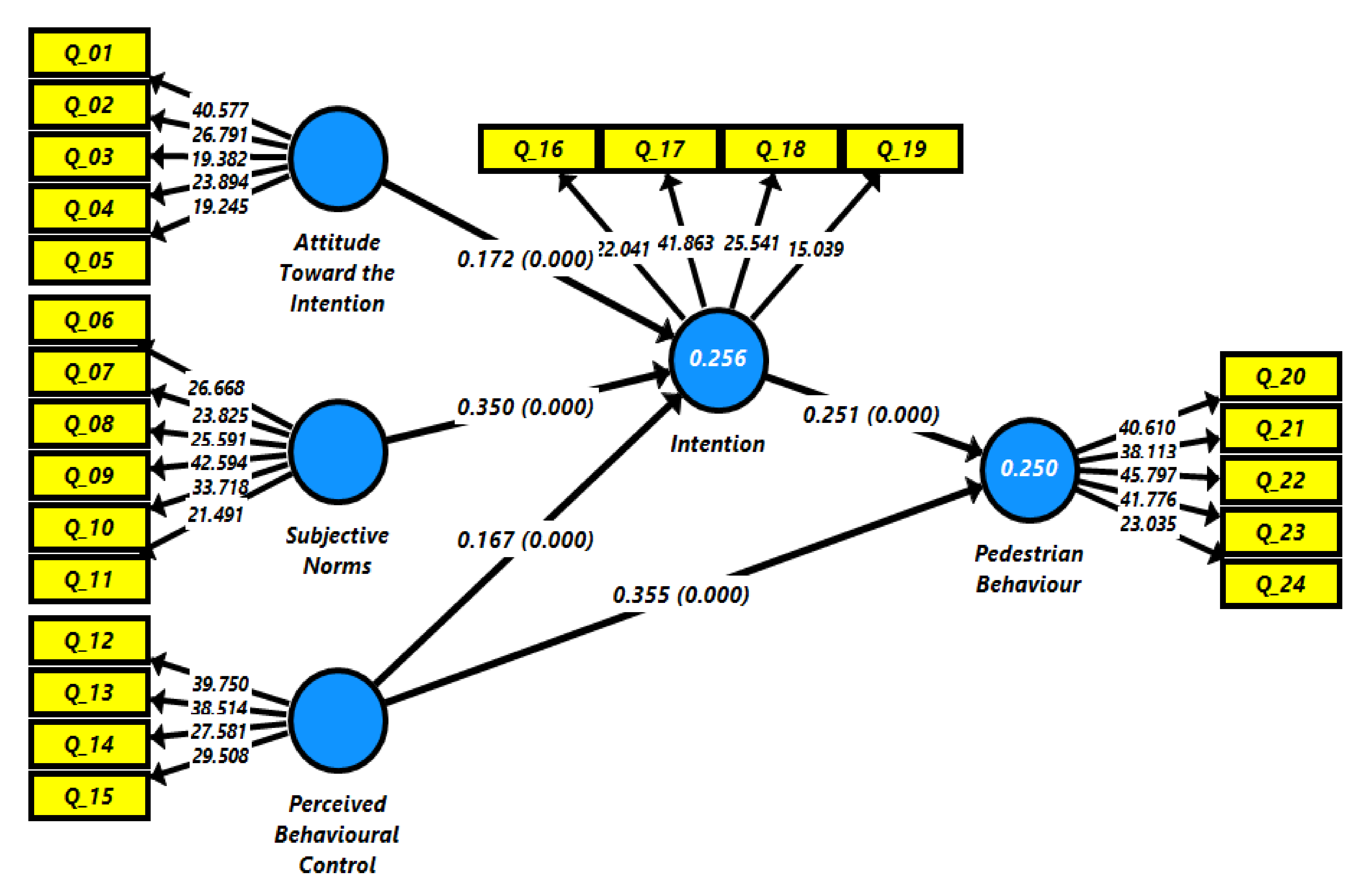
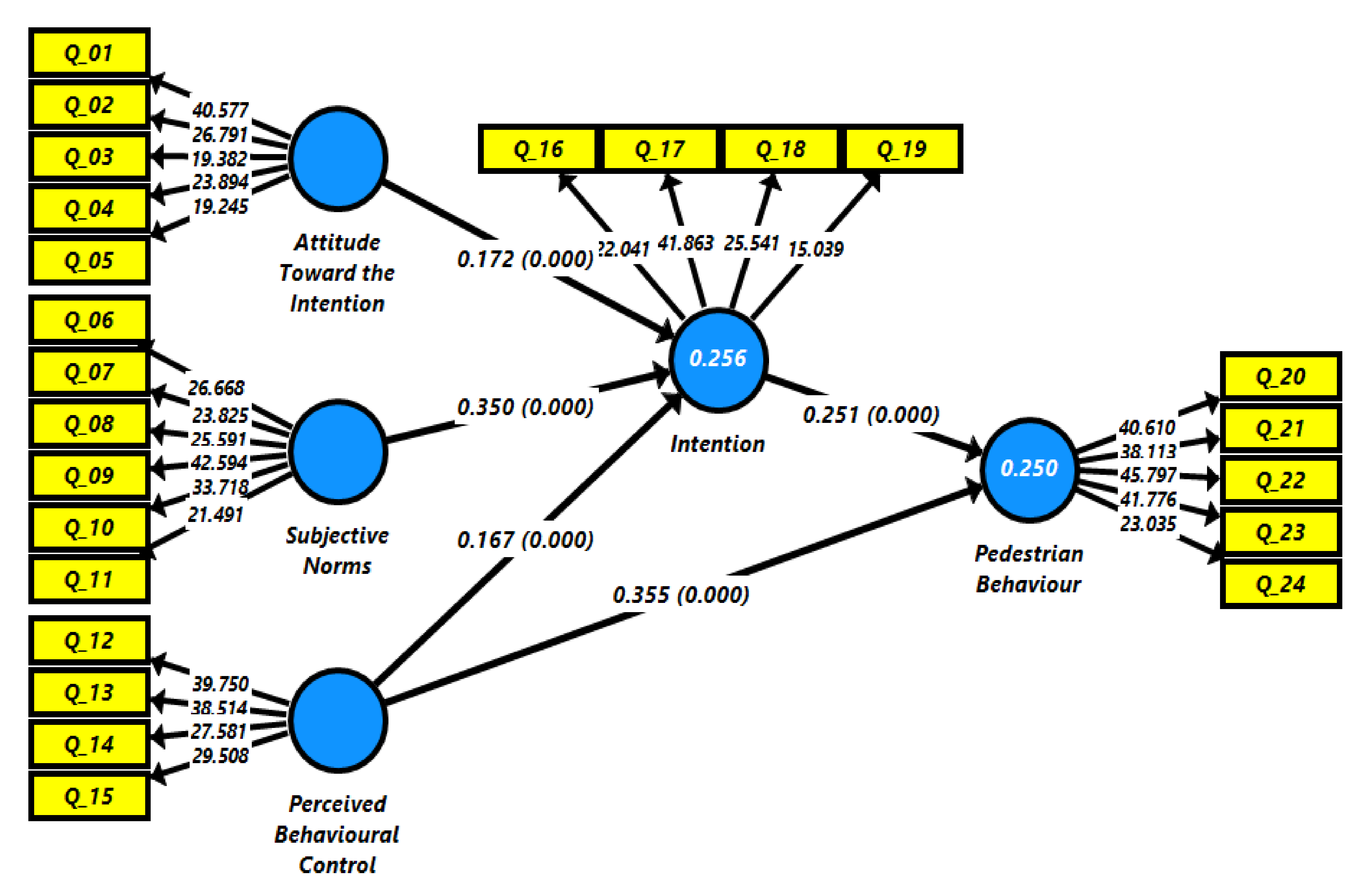
5.5. Assessment of Structural Model
5.6. R-Square (R2)
5.7. Model Predictive Relevance (Q2)
6. Discussion
6.1. Demographic Influences
6.2. Surrounding Contextual Effect and Pedestrians Responses
6.3. Driving Behavior
6.4. Modality of communication
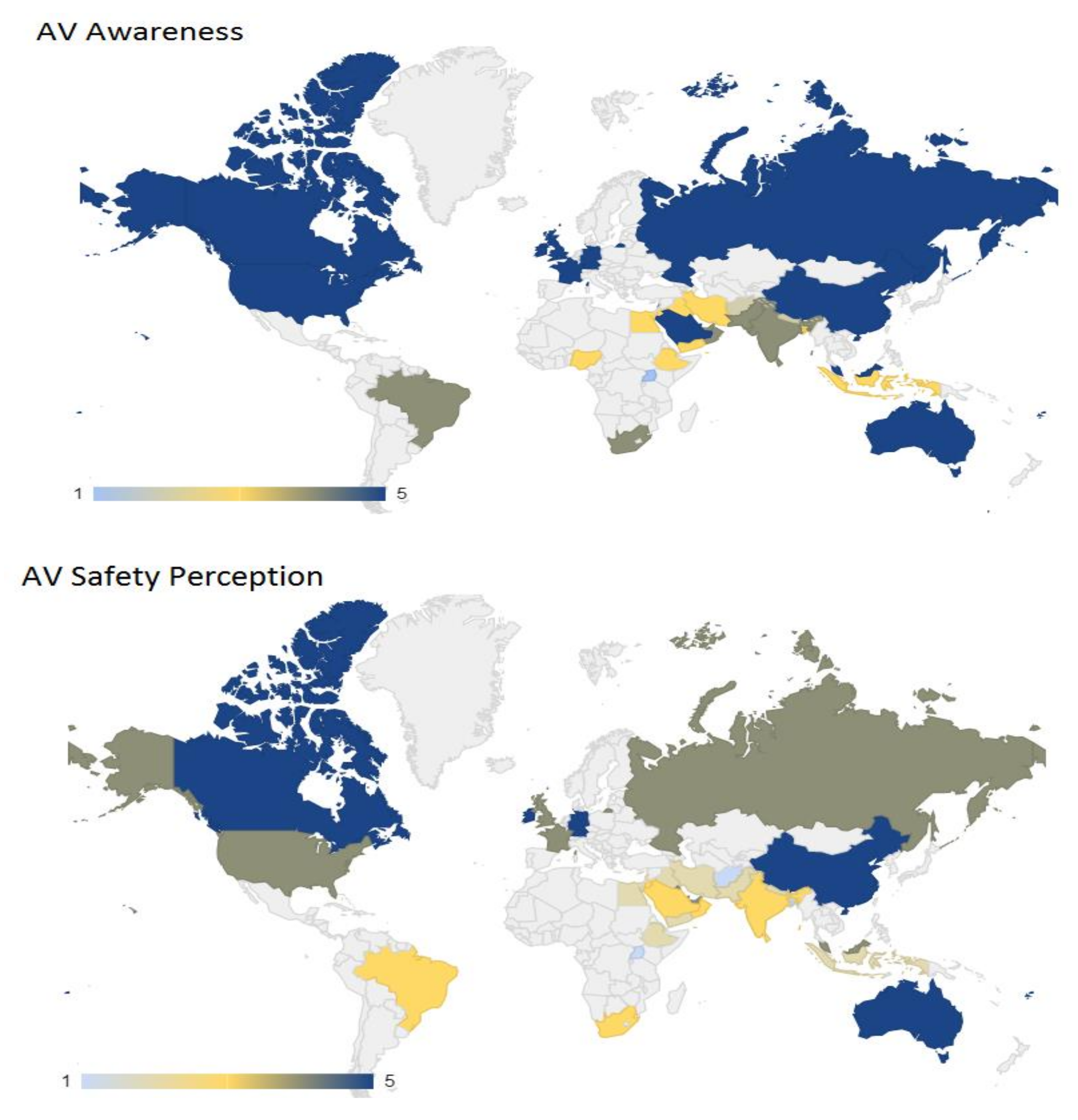
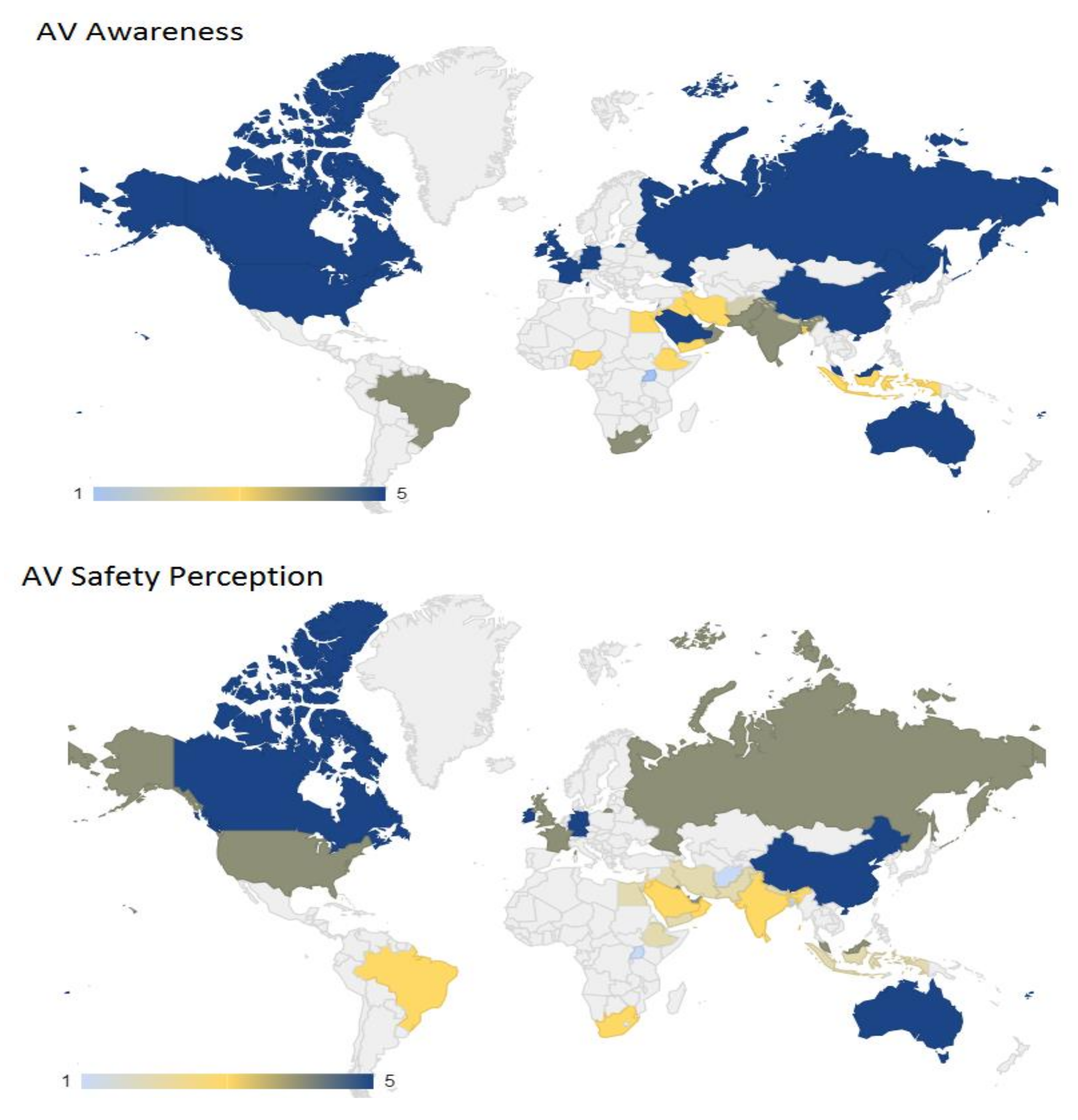
6.5. AV Awareness and Safety Perception
6.6. Rules Compliance
7. Limitations and Future Work
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Baidu is the Sixth Company Approved to Test Fully Driverless Cars in California. Home Page. Available online: https://www.theverge.com/2021/1/27/22252944/baidu-driverless-cars-test-permit-california-dmv (accessed on 1 July 2021).
- Golbabaei, F.; Yigitcanlar, T.; Bunker, J. The role of shared autonomous vehicle systems in delivering smart urban mobility: A systematic review of the literature. Int. J. Sustain. Transp. 2020, 15, 731–748. [Google Scholar] [CrossRef]
- Golbabaei, F.; Yigitcanlar, T.; Paz, A.; Bunker, J. Individual Predictors of Autonomous Vehicle Public Acceptance and Intention to Use: A Systematic Review of the Literature. J. Open Innov. Technol. Mark. Complex. 2020, 6, 106. [Google Scholar] [CrossRef]
- Gkartzonikas, C.; Gkritza, K. What have we learned? A review of stated preference and choice studies on autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2018, 98, 323–337. [Google Scholar] [CrossRef]
- Cunneen, M.; Mullins, M.; Murphy, F.; Shannon, D.; Furxhi, I.; Ryan, C. Autonomous Vehicles and Avoiding the Trolley (Dilemma): Vehicle Perception, Classification, and the Challenges of Framing Decision Ethics. Cybern. Syst. 2020, 51, 59–80. [Google Scholar] [CrossRef] [Green Version]
- Kaur, K.; Rampersad, G. Trust in driverless cars: Investigating key factors influencing the adoption of driverless cars. J. Eng. Technol. Manag. 2018, 48, 87–96. [Google Scholar] [CrossRef]
- Malin, F.; Norros, I.; Innamaa, S. Accident risk of road and weather conditions on different road types. Accid. Anal. Prev. 2018, 122, 181–188. [Google Scholar] [CrossRef] [PubMed]
- SAE International. SAE J3016 Levels of Driving Automation. Home Page. Available online: https://www.sae.org/blog/sae-j3016-update (accessed on 1 July 2021).
- Camara, F.; Bellotto, N.; Cosar, S.; Weber, F.; Nathanael, D.; Althoff, M.; Wu, J.; Ruenz, J.; Dietrich, A.; Markkula, G.; et al. Pedestrian Models for Autonomous Driving Part II: High-Level Models of Human Behavior. IEEE Trans. Intell. Transp. Syst. 2020, 22, 5453–5472. [Google Scholar] [CrossRef]
- Millard-Ball, A. Pedestrians, Autonomous Vehicles, and Cities. J. Plan. Educ. Res. 2018, 38, 6–12. [Google Scholar] [CrossRef]
- Etzioni, S.; Hamadneh, J.; Elvarsson, A.; Esztergár-Kiss, D.; Djukanovic, M.; Neophytou, S.; Sodnik, J.; Polydoropoulou, A.; Tsouros, I.; Pronello, C.; et al. Modeling Cross-National Differences in Automated Vehicle Acceptance. Sustainability 2020, 12, 9765. [Google Scholar] [CrossRef]
- Polydoropoulou, A.; Tsouros, I.; Thomopoulos, N.; Pronello, C.; Elvarsson, A.; Sigþórsson, H.; Dadashzadeh, N.; Stojmenova, K.; Sodnik, J.; Neophytou, S.; et al. Who is willing to share their AV? Insights about gender differences among seven countries. Sustainability 2021, 13, 4769. [Google Scholar] [CrossRef]
- Rasouli, A.; Tsotsos, J.K. Autonomous Vehicles That Interact with Pedestrians: A Survey of Theory and Practice. IEEE Trans. Intell. Transp. Syst. 2019, 21, 900–918. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Wu, J.; Zheng, P.; McDonald, M. Study of pedestrians’ gap acceptance behavior when they jaywalk outside crossing facilities. In Proceedings of the 13th International IEEE Conference on Intelligent Transportation Systems, Madeira, Portugal, 19–22 September 2010. [Google Scholar]
- Juhlin, O. Traffic behavior as social interaction—Implications for the design of artificial drivers. In Proceedings of the 6th World Congress on Intelligent Transport Systems (ITS), Toronto, ON, Canada, 8–12 November 1999. [Google Scholar]
- Conceição, L.; Correia, G.; Tavares, J.P. The deployment of automated vehicles in urban transport systems: A methodology to design dedicated zones. Transp. Res. Procedia 2017, 27, 230–237. [Google Scholar] [CrossRef]
- Dirsehan, T.; Can, C. Examination of trust and sustainability concerns in autonomous vehicle adoption. Technol. Soc. 2020, 63, 101361. [Google Scholar] [CrossRef]
- Kim, I.; LaRue, G.; Ferreira, L.; Rakotonirainy, A.; Shaaban, K. Driver Behaviors at Level Crossings from Fixed and Moving Driving Simulators. Procedia Comput. Sci. 2018, 130, 103–110. [Google Scholar] [CrossRef]
- Penmetsa, P.; Adanu, E.K.; Wood, D.; Wang, T.; Jones, S.L. Perceptions and expectations of autonomous vehicles—A snapshot of vulnerable road user opinion. Technol. Forecast. Soc. Chang. 2019, 143, 9–13. [Google Scholar] [CrossRef]
- Pyrialakou, V.D.; Gkartzonikas, C.; Gatlin, J.D.; Gkritza, K. Perceptions of safety on a shared road: Driving, cycling, or walking near an autonomous vehicle. J. Saf. Res. 2020, 72, 249–258. [Google Scholar] [CrossRef] [PubMed]
- Nair, G.S.; Bhat, C.R. Sharing the road with autonomous vehicles: Perceived safety and regulatory preferences. Transp. Res. Part C Emerg. Technol. 2020, 122, 102885. [Google Scholar] [CrossRef]
- Lagström, T. AVIP—Autonomous Vehicles’ Interaction with Pedestrians an Investigation of Pedestrian-Driver Communication. Master’s Thesis, Chalmers University of Technology, Gothenburg, Sweden, 2015. [Google Scholar]
- Chang, C.M.; Toda, K.; Sakamoto, D.; Igarashi, T. Eyes on a car: An interface design for communication between an autonomous car and a pedestrian. In Proceedings of the 9th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24–27 September 2017. [Google Scholar]
- Clamann, M. Evaluation of Vehicle-to-Pedestrian Communication Displays for Autonomous Vehicles. In Proceedings of the 96th Annual Transportation Research Board Meeting—Symposium Conducted at the Meeting of Transportation Research Board (TRB), Washington, DC, USA, 8–12 January 2017. [Google Scholar]
- Bazilinskyy, P.; Dodou, D.; de Winter, J. Survey on eHMI concepts: The effect of text, color, and perspective. Transp. Res. Part F Traffic Psychol. Behav. 2019, 67, 175–194. [Google Scholar] [CrossRef]
- Zandi, B.; Singer, T.; Kobbert, J.; Khanh, T.Q. International study on the importance of communication between automated vehicles and pedestrians. Transp. Res. Part F Traffic Psychol. Behav. 2020, 74, 52–66. [Google Scholar] [CrossRef]
- Moody, J.; Bailey, N.; Zhao, J. Public perceptions of autonomous vehicle safety: An international comparison. Saf. Sci. 2019, 121, 634–650. [Google Scholar] [CrossRef]
- Wang, K.; Li, G.; Chen, J.; Long, Y.; Chen, T.; Chen, L.; Xia, Q. The adaptability and challenges of autonomous vehicles to pedestrians in urban China. Accid. Anal. Prev. 2020, 145, 105692. [Google Scholar] [CrossRef]
- Deb, S.; Strawderman, L.; Carruth, D.W.; DuBien, J.; Smith, B.; Garrison, T.M. Development and validation of a questionnaire to assess pedestrian receptivity toward fully autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 84, 178–195. [Google Scholar] [CrossRef]
- Hulse, L.M.; Xie, H.; Galea, E.R. Perceptions of autonomous vehicles: Relationships with road users, risk, gender and age. Saf. Sci. 2018, 102, 1–13. [Google Scholar] [CrossRef]
- Qu, W.; Xu, J.; Ge, Y.; Sun, X.; Zhang, K. Development and validation of a questionnaire to assess public receptivity toward autonomous vehicles and its relation with the traffic safety climate in China. Accid. Anal. Prev. 2019, 128, 78–86. [Google Scholar] [CrossRef] [PubMed]
- Deb, S.; Strawderman, L.; DuBien, J.; Smith, B.; Carruth, D.W.; Garrison, T.M. Evaluating pedestrian behavior at crosswalks: Validation of a pedestrian behavior questionnaire for the U.S. population. Accid. Anal. Prev. 2017, 106, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Thomas, E.; McCrudden, C.; Wharton, Z.; Behera, A. Perception of autonomous vehicles by the modern society: A survey. IET Intell. Transp. Syst. 2020, 14, 1228–1239. [Google Scholar] [CrossRef]
- Beck, L.; Ajzen, I. Predicting dishonest actions using the theory of planned behavior. J. Res. Pers. 1991, 25, 285–301. [Google Scholar] [CrossRef]
- Ajzen, I. The theory of planned behavior. Organ. Behav. Hum. Decis. Process. 1991, 50, 179–211. [Google Scholar] [CrossRef]
- Ajzen, I. From intentions to actions: A theory of planned behavior. In Action Control; Kuhl, J., Beckmann, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1985; pp. 11–39. [Google Scholar]
- Shakibazadeh, E.; Sabouri, M.; Mohebbi, B.; Tol, A.; Yaseri, M.; Babaee, S. Effectiveness of an educational intervention using theory of planned behavior on health care empowerment among married reproductive-age women: A randomized controlled trial. J. Educ. Health Promot. 2020, 9, 293. [Google Scholar] [CrossRef]
- Akulume, M.; Kiwanuka, S.N. Health Care Waste Segregation Behavior among Health Workers in Uganda: An Application of the Theory of Planned Behavior. J. Environ. Public Health 2016, 2016, 8132306. [Google Scholar] [CrossRef] [Green Version]
- Shubayr, M.A.; Mashyakhy, M.; Al Agili, D.E.; Albar, N.; Quadri, M.F. Factors Associated with Infection-Control Behavior of Dental Health–Care Workers During the COVID-19 Pandemic: A Cross-Sectional Study Applying the Theory of Planned Behavior. J. Multidiscip. Health 2020, 13, 1527–1535. [Google Scholar] [CrossRef] [PubMed]
- DeFranc, A.; Broucke, S.V.D.; Leroy, R.; Hoppenbrouwers, K.; Lesaffre, E.; Martens, L.; Debyser, M.; Declerck, D. Measuring oral health behaviour in Flemish health care workers: An application of the theory of planned behaviour. Community Dent. Health 2008, 25, 107–114. [Google Scholar]
- Si, H.; Shi, J.-G.; Tang, D.; Wen, S.; Miao, W.; Duan, K. Application of the Theory of Planned Behavior in Environmental Science: A Comprehensive Bibliometric Analysis. Int. J. Environ. Res. Public Health 2019, 16, 2788. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ateş, H. Merging Theory of Planned Behavior and Value Identity Personal norm model to explain pro-environmental behaviors. Sustain. Prod. Consum. 2020, 24, 169–180. [Google Scholar] [CrossRef]
- Price, J.C.; Leviston, Z. Predicting pro-environmental agricultural practices: The social, psychological and contextual influences on land management. J. Rural Stud. 2014, 34, 65–78. [Google Scholar] [CrossRef]
- Giampietri, E.; Verneau, F.; Del Giudice, T.; Carfora, V.; Finco, A. A Theory of Planned behaviour perspective for investigating the role of trust in consumer purchasing decision related to short food supply chains. Food Qual. Prefer. 2018, 64, 160–166. [Google Scholar] [CrossRef]
- Kamble, S.; Gunasekaran, A.; Arha, H. Understanding the Blockchain technology adoption in supply chains-Indian context. Int. J. Prod. Res. 2018, 57, 2009–2033. [Google Scholar] [CrossRef]
- Kianpour, K.; Jusoh, A.; Mardani, A.; Streimikiene, D.; Cavallaro, F.; Nor, K.M.; Zavadskas, E.K. Factors influencing consumers’ intention to return the end of life electronic products through reverse supply chain management for reuse, repair and recycling. Sustainability 2017, 9, 1657. [Google Scholar] [CrossRef] [Green Version]
- Heath, Y.; Gifford, R. Extending the Theory of Planned Behavior: Predicting the Use of Public Transportation1. J. Appl. Soc. Psychol. 2002, 32, 2154–2189. [Google Scholar] [CrossRef]
- Shaaban, K.; Maher, A. Using the theory of planned behavior to predict the use of an upcoming public transportation service in Qatar. Case Stud. Transp. Policy 2019, 8, 484–491. [Google Scholar] [CrossRef]
- Jing, P.; Huang, H.; Ran, B.; Zhan, F.; Shi, Y. Exploring the Factors Affecting Mode Choice Intention of Autonomous Vehicle Based on an Extended Theory of Planned Behavior—A Case Study in China. Sustainability 2019, 11, 1155. [Google Scholar] [CrossRef] [Green Version]
- Demir, B.; Özkan, T.; Demir, S. Pedestrian violations: Reasoned or social reactive? Comparing theory of planned behavior and prototype willingness model. Transp. Res. Part F Traffic Psychol. Behav. 2018, 60, 560–572. [Google Scholar] [CrossRef]
- Piazza, A.J.; Knowlden, A.P.; Hibberd, E.; Leeper, J.; Paschal, A.M.; Usdan, S. Mobile device use while crossing the street: Utilizing the theory of planned behavior. Accid. Anal. Prev. 2019, 127, 9–18. [Google Scholar] [CrossRef] [PubMed]
- Sundararajan, K.D.; Ambak, K.; Daniel, B.D.; Ishak, S.Z.; Putranto, L.S. Pedestrian Behavioural Intention to Use Crossing Facilities Based on Extended Theory of Planned Behaviour. Jurnal Kejuruteraan 2020, 32, 167–174. [Google Scholar]
- Hashemiparast, M.; Sharma, M.; Jafarabadi, M.A.; Hosseini, Z. Still careless: Findings from a cross-sectional study of young pedestrians’ risky road crossing behaviors. Arch. Public Health 2020, 78, 44. [Google Scholar] [CrossRef]
- Li, B.; Jin, Z.; Wang, H.; Zhu, S. Analysis of Pedestrian Violation Behavior at Signalized Intersections Based on the Theory of Planned Behavior. J. Wuhan Univ. Technol. 2018, 12, 212–218. [Google Scholar]
- Ong, M.H.A.; Puteh, F. Quantitative Data Analysis: Choosing Between SPSS, PLS and AMOS in Social Science Research. Int. Interdiscip. J. Sci. Res. 2017, 3, 14–25. [Google Scholar]
- Johnson, R.A.; Wichern, D.W. Applied Multivariate Statistical Analysis, 7th ed.; Pearson Prentice Hall: New York, NY, USA, 2007; ISBN 9780131877153. [Google Scholar]
- Hair, J.F.; Ringle, C.M.; Sarstedt, M. PLS-SEM: Indeed a silver bullet. J. Mark. Theory Pract. 2011, 19, 139–152. [Google Scholar] [CrossRef]
- Tabachnick, B.G.; Fidell, L.S. Using Multivariate Statistics, 6th ed.; Pearson Prentice Hall: New York, NY, USA, 2013; ISBN 9789389342239. [Google Scholar]
- Kaiser, H.F. An index of factorial simplicity. Psychometrika 1974, 39, 31–36. [Google Scholar] [CrossRef]
- Field, A. Discovering Statistics Using IBM SPSS Statistics: And Sex and Drugs and Rock “n” Roll, 3rd ed.; SAGE Publications: London, UK, 2009; ISBN 9781412977524. [Google Scholar]
- Podsakoff, P.M.; Organ, D.W. Self-Reports in Organizational Research: Problems and Prospects. J. Manag. 1986, 12, 531–544. [Google Scholar] [CrossRef]
- Hair, J.F.; Risher, J.J.; Sarstedt, M.; Ringle, C.M. When to use and how to report the results of PLS-SEM. Eur. Bus. Rev. 2019, 31, 2–24. [Google Scholar] [CrossRef]
- Benitez, J.; Henseler, J.; Castillo, A.; Schuberth, F. How to perform and report an impactful analysis using partial least squares: Guidelines for confirmatory and explanatory IS research. Inf. Manag. 2020, 57, 103168. [Google Scholar] [CrossRef]
- Hair, J.F. Multivariate Data Analysis, 7th ed.; Pearson Prentice Hall: New York, NY, USA, 2009; ISBN 9780138132637. [Google Scholar]
- Henseler, J.; Ringle, C.M.; Sinkovics, R.R. The use of partial least squares path modeling in international marketing. In Advances in International Marketing; Sinkovics, R.R., Ghauri, P.N., Eds.; Emerald Group Publishing Limited: Bingley, UK, 2009; Volume 20, pp. 277–319. [Google Scholar]
- Hair, J.F.; Sarstedt, M.; Hopkins, L.; Kuppelwieser, V.G. Partial least squares structural equation modeling (PLS-SEM): An emerging tool in business research. Eur. Bus. Rev. 2014, 26, 106–121. [Google Scholar] [CrossRef]
- Bagozzi, R.P.; Yi, Y. On the evaluation of structural equation models. J. Acad. Mark. Sci. 1988, 16, 74–94. [Google Scholar] [CrossRef]
- Fornell, C.; Larcker, D.F. Structural Equation Models with Unobservable Variables and Measurement Error: Algebra and Statistics. J. Mark. Res. 1981, 18. [Google Scholar] [CrossRef]
- Chin, W.W. Issues and opinion on structural equation modeling. MIS Q. 1998, 22, 7–16. [Google Scholar]
- Henseler, J.; Ringle, C.M.; Sarstedt, M. A new criterion for assessing discriminant validity in variance-based structural equation modeling. J. Acad. Mark. Sci. 2015, 43, 115–135. [Google Scholar] [CrossRef] [Green Version]
- Mason, C.H.; Perreault, W.D. Collinearity, Power, and Interpretation of. J. Mark. Res. 1991, 28, 268–280. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; Lawrence Erlbaum Associates: New York, NY, USA, 1998; ISBN 9780805802832. [Google Scholar]
- Shmueli, G. Predictive Analytics in Information Systems Research. MIS Q. 2011, 35, 553–572. [Google Scholar] [CrossRef] [Green Version]
- Rigdon, E.E. Rethinking Partial Least Squares Path Modeling: In Praise of Simple Methods. Long Range Plan. 2012, 45, 341–358. [Google Scholar] [CrossRef]
- Holland, C.; Hill, R. The effect of age, gender and driver status on pedestrians’ intentions to cross the road in risky situations. Accid. Anal. Prev. 2007, 39, 224–237. [Google Scholar] [CrossRef] [PubMed]
- Dey, D.; Martens, M.; Eggen, B.; Terken, J. The impact of vehicle appearance and vehicle behavior on pedestrian interaction with autonomous vehicles. In Proceedings of the 9th International ACM Conference on Automotive User Interfaces and Interactive Vehicular Applications, Oldenburg, Germany, 24 – 27 September 2017. [Google Scholar]
- Özkan, T.; Lajunen, T.; Chliaoutakis, J.E.; Parker, D.; Summala, H. Cross-cultural differences in driving behaviours: A comparison of six countries. Transp. Res. Part F Traffic Psychol. Behav. 2006, 9, 227–242. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Questions | Motivations |
|---|---|
| Is it essential to consider context while designing and developing an AV–pedestrian system? | It plays a vital role in pedestrian attitude, and its consideration will help in building a robust vehicle–pedestrian system. |
| Is it necessary to understand regional norms, social demographic variations, and adoption of traffic rules? | Understanding variations is essential, as it highly affects attitude. |
| How important is communication between pedestrians and drivers? | Pedestrian and driver actions entirely depend upon their visual communication. |
| How many people are aware of an AVs, what is their safety perception? | Both awareness and safety perception is the criteria of any technology acceptance. |
| Is it required to investigate communication mode between pedestrians and AV? | Knowing communication mode will help auto manufacturers in building a suitable communication model. |
| Reference/Study | Survey/Analysis Approach | Research Objective | Main Finding |
|---|---|---|---|
| [27] | International survey Multilevel structural equation modeling | Perceptions of AV safety Awareness of AV Cross country/cultural comparison | Young males have more optimistic and positive perceptions of AVs. |
| [28] | Nation-based survey Basic statistical analysis | Pedestrian behavior analysis Trust and intention to adopt Modality of communication | Safety concerns were observed in an occluded pedestrian environment. |
| [31] | Nation-based survey Principal Component Analysis | Trust and Intention to adopt Perceptions of AV safety Perceptions of AV safety | People who are familiar with AVs advanced assisted systems believe that AVs are more useful and safe |
| [32] | Nation-based survey Factor Analysis/ Regression Analysis | Pedestrian behavior analysis Perceptions of AV safety | Males reported a significantly higher frequency of unsafe behaviors on the road than females |
| [33] | Nation-based survey Factor Analysis | Perceptions of AV safety Trust and Intention to adopt | Pedestrians believe AV–pedestrians are less risky compared to human-operated cars |
| [30] | International survey Graphical Analysis | Trust and intention to adopt perceptions of AV safety Cross country/cultural comparison | The respondents are most concerned about crashing, malfunctioning, purchase price, liability for incidents, interaction |
| N | Minimum | Maximum | Mean | Std. Deviation | Skewness | Kurtosis | |
|---|---|---|---|---|---|---|---|
| Q_01 | 965 | 1 | 5 | 4.580 | 0.959 | −2.660 | 6.555 |
| Q_02 | 965 | 1 | 5 | 4.410 | 1.093 | −1.833 | 2.372 |
| Q_03 | 965 | 1 | 5 | 4.540 | 1.008 | −2.362 | 4.696 |
| Q_04 | 965 | 1 | 5 | 4.460 | 1.129 | −2.117 | 3.337 |
| Q_05 | 965 | 1 | 5 | 4.520 | 1.037 | −2.363 | 4.695 |
| Q_06 | 965 | 1 | 5 | 4.170 | 1.130 | −1.207 | 0.566 |
| Q_07 | 965 | 1 | 5 | 4.490 | 0.921 | −1.877 | 2.992 |
| Q_08 | 965 | 1 | 5 | 4.670 | 0.780 | −2.912 | 8.830 |
| Q_09 | 965 | 1 | 5 | 4.450 | 0.949 | −1.895 | 3.222 |
| Q_10 | 965 | 1 | 5 | 4.060 | 1.226 | −1.051 | 0.054 |
| Q_11 | 965 | 1 | 5 | 3.970 | 1.252 | −0.987 | −0.107 |
| Q_12 | 965 | 1 | 5 | 4.190 | 0.966 | −1.173 | 0.783 |
| Q_13 | 965 | 1 | 5 | 4.330 | 1.024 | −1.680 | 2.248 |
| Q_14 | 965 | 1 | 5 | 4.360 | 1.004 | −1.779 | 2.650 |
| Q_15 | 965 | 1 | 5 | 4.270 | 1.094 | −1.599 | 1.719 |
| Q_16 | 965 | 1 | 5 | 4.720 | 0.705 | −3.126 | 10.702 |
| Q_17 | 965 | 1 | 5 | 4.640 | 0.749 | −2.674 | 8.074 |
| Q_18 | 965 | 1 | 5 | 4.750 | 0.567 | −3.150 | 13.528 |
| Q_19 | 965 | 1 | 5 | 4.660 | 0.728 | −2.377 | 5.650 |
| Q_20 | 965 | 1 | 5 | 3.980 | 1.098 | −0.760 | −0.166 |
| Q_21 | 965 | 1 | 5 | 3.830 | 1.101 | −0.656 | −0.248 |
| Q_22 | 965 | 1 | 5 | 3.480 | 1.371 | −0.424 | −1.085 |
| Q_23 | 965 | 1 | 5 | 3.650 | 1.324 | −0.626 | −0.737 |
| Q_24 | 965 | 1 | 5 | 3.780 | 1.396 | −0.807 | −0.672 |
| Country | Participants % |
|---|---|
| Afghanistan | 0.5 |
| Australia | 0.8 |
| Bangladesh | 0.9 |
| Belgium | 0.8 |
| Brazil | 0.5 |
| Canada | 6.4 |
| China | 7.8 |
| France | 1.5 |
| India | 4.1 |
| Indonesia | 2.7 |
| Ireland | 6.9 |
| Hong Kong | 1.1 |
| Jordan | 0.8 |
| Kuwait | 1.3 |
| Kenya | 0.7 |
| Malaysia | 10 |
| Nigeria | 2 |
| Oman | 4.6 |
| Pakistan | 14 |
| Singapore | 1.3 |
| Saudi Arabia | 12.3 |
| Sudan | 1.1 |
| Syria | 1.1 |
| Uganda | 1.65 |
| U.A.E | 1.5 |
| U.K. | 3.9 |
| U.S.A. | 9.4 |
| Component | Dimension | |||||
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| Q_01 | 0.879 | Attitude Toward the Intention | ||||
| Q_02 | 0.785 | |||||
| Q_03 | 0.736 | |||||
| Q_04 | 0.743 | |||||
| Q_05 | 0.714 | |||||
| Q_06 | 0.724 | Subjective Norms | ||||
| Q_07 | 0.503 | |||||
| Q_08 | 0.673 | |||||
| Q_09 | 0.778 | |||||
| Q_10 | 0.792 | |||||
| Q_11 | 0.519 | |||||
| Q_12 | 0.561 | Perceived Behavioral Control | ||||
| Q_13 | 0.688 | |||||
| Q_14 | 0.753 | |||||
| Q_15 | 0.820 | |||||
| Q_16 | 0.715 | Intention | ||||
| Q_17 | 0.775 | |||||
| Q_18 | 0.762 | |||||
| Q_19 | 0.597 | |||||
| Q_20 | 0.689 | Pedestrian Behavior | ||||
| Q_21 | 0.660 | |||||
| Q_22 | 0.815 | |||||
| Q_23 | 0.767 | |||||
| Q_24 | 0.478 | |||||
| Variables Name | Item Label | Factor Loading | Cronbach’s Alpha | rho_A | Composite Reliability | Average Variance Extracted (AVE) |
|---|---|---|---|---|---|---|
| Attitude Toward the Intention | 0.849 | 0.856 | 0.892 | 0.624 | ||
| Q_01 | 0.869 | |||||
| Q_02 | 0.806 | |||||
| Q_03 | 0.740 | |||||
| Q_04 | 0.789 | |||||
| Q_05 | 0.739 | |||||
| Subjective Norms | 0.814 | 0.818 | 0.864 | 0.516 | ||
| Q_06 | 0.702 | |||||
| Q_07 | 0.696 | |||||
| Q_08 | 0.733 | |||||
| Q_09 | 0.796 | |||||
| Q_10 | 0.744 | |||||
| Q_11 | 0.630 | |||||
| Perceived Behavioral Control | 0.760 | 0.781 | 0.844 | 0.574 | ||
| Q_12 | 0.773 | |||||
| Q_13 | 0.779 | |||||
| Q_14 | 0.728 | |||||
| Q_15 | 0.750 | |||||
| Intention | 0.752 | 0.772 | 0.844 | 0.577 | ||
| Q_16 | 0.773 | |||||
| Q_17 | 0.838 | |||||
| Q_18 | 0.777 | |||||
| Q_19 | 0.634 | |||||
| Pedestrian Behavior | 0.807 | 0.807 | 0.866 | 0.566 | ||
| Q_20 | 0.769 | |||||
| Q_21 | 0.758 | |||||
| Q_22 | 0.802 | |||||
| Q_23 | 0.783 | |||||
| Q_24 | 0.639 | |||||
| ATI | I | PB | PBC | SN | |
|---|---|---|---|---|---|
| Attitude Toward the Intention | 0.790 | ||||
| Intention | 0.269 | 0.759 | |||
| Pedestrian Behavior | 0.234 | 0.372 | 0.752 | ||
| Perceived Behavioral Control | 0.284 | 0.342 | 0.441 | 0.758 | |
| Subjective Norms | 0.141 | 0.435 | 0.507 | 0.359 | 0.719 |
| ATI | I | PB | PBC | SN | |
|---|---|---|---|---|---|
| Attitude Toward the Intention | |||||
| Intention | 0.331 | ||||
| Pedestrian Behavior | 0.287 | 0.468 | |||
| Perceived Behavioral Control | 0.333 | 0.442 | 0.519 | ||
| Subjective Norms | 0.161 | 0.537 | 0.627 | 0.419 |
| H | Relationship | Std Beta | Std Error | t-Value | f-Square | Decision | CI LL | CI UL |
|---|---|---|---|---|---|---|---|---|
| H1 | ATI -> I | 0.172 | 0.037 | 4.713 *** | 0.037 | Supported | 0.106 | 0.248 |
| H2 | PBC -> I | 0.350 | 0.040 | 8.725 *** | 0.143 | Supported | 0.274 | 0.430 |
| H3 | SN -> I | 0.167 | 0.034 | 4.903 *** | 0.031 | Supported | 0.102 | 0.235 |
| H4 | PBC -> PB | 0.355 | 0.029 | 12.127 *** | 0.149 | Supported | 0.298 | 0.413 |
| H5 | I -> PB | 0.251 | 0.032 | 7.910 *** | 0.074 | Supported | 0.188 | 0.312 |
| SSO | SSE | Q2 (=1 − SSE/SSO) | |
|---|---|---|---|
| Intention | 3860 | 3309.290 | 0.143 |
| Pedestrian Behaviour | 4825 | 4164.002 | 0.137 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hafeez, F.; Ullah Sheikh, U.; Mas’ud, A.A.; Al-Shammari, S.; Hamid, M.; Azhar, A. Application of the Theory of Planned Behavior in Autonomous Vehicle-Pedestrian Interaction. Appl. Sci. 2022, 12, 2574. https://doi.org/10.3390/app12052574
Hafeez F, Ullah Sheikh U, Mas’ud AA, Al-Shammari S, Hamid M, Azhar A. Application of the Theory of Planned Behavior in Autonomous Vehicle-Pedestrian Interaction. Applied Sciences. 2022; 12(5):2574. https://doi.org/10.3390/app12052574
Chicago/Turabian StyleHafeez, Farrukh, Usman Ullah Sheikh, Abdullahi Abubakar Mas’ud, Saud Al-Shammari, Muhammad Hamid, and Ameer Azhar. 2022. "Application of the Theory of Planned Behavior in Autonomous Vehicle-Pedestrian Interaction" Applied Sciences 12, no. 5: 2574. https://doi.org/10.3390/app12052574
APA StyleHafeez, F., Ullah Sheikh, U., Mas’ud, A. A., Al-Shammari, S., Hamid, M., & Azhar, A. (2022). Application of the Theory of Planned Behavior in Autonomous Vehicle-Pedestrian Interaction. Applied Sciences, 12(5), 2574. https://doi.org/10.3390/app12052574