
Particle Filter Design for Robust Nonlinear Control System of Uncertain Heat Exchange Process with Sensor Noise and Communication Time Delay



Abstract
:1. Introduction
- The particle filter algorithm is integrated into a robust nonlinear control system to simultaneously deal with the effects of sensor noise and time delay, and the control performance is guaranteed.
- Particle weight adjustment is used when the noise is so large that it affects the particle filter algorithm and the entire control system. In such a method, the 3 rule is first used to evaluate the impact of the noise, and then the original particle weight is replaced by the exponential weight for particles that violate the 3 rule when the number of such particles reaches a certain proportion. This kind of weight adjustment ensures the normal operation of the particle filter and control system.
- The simulation results and the corresponding analysis of the results verify the effectiveness of the proposed method.
2. Preliminaries
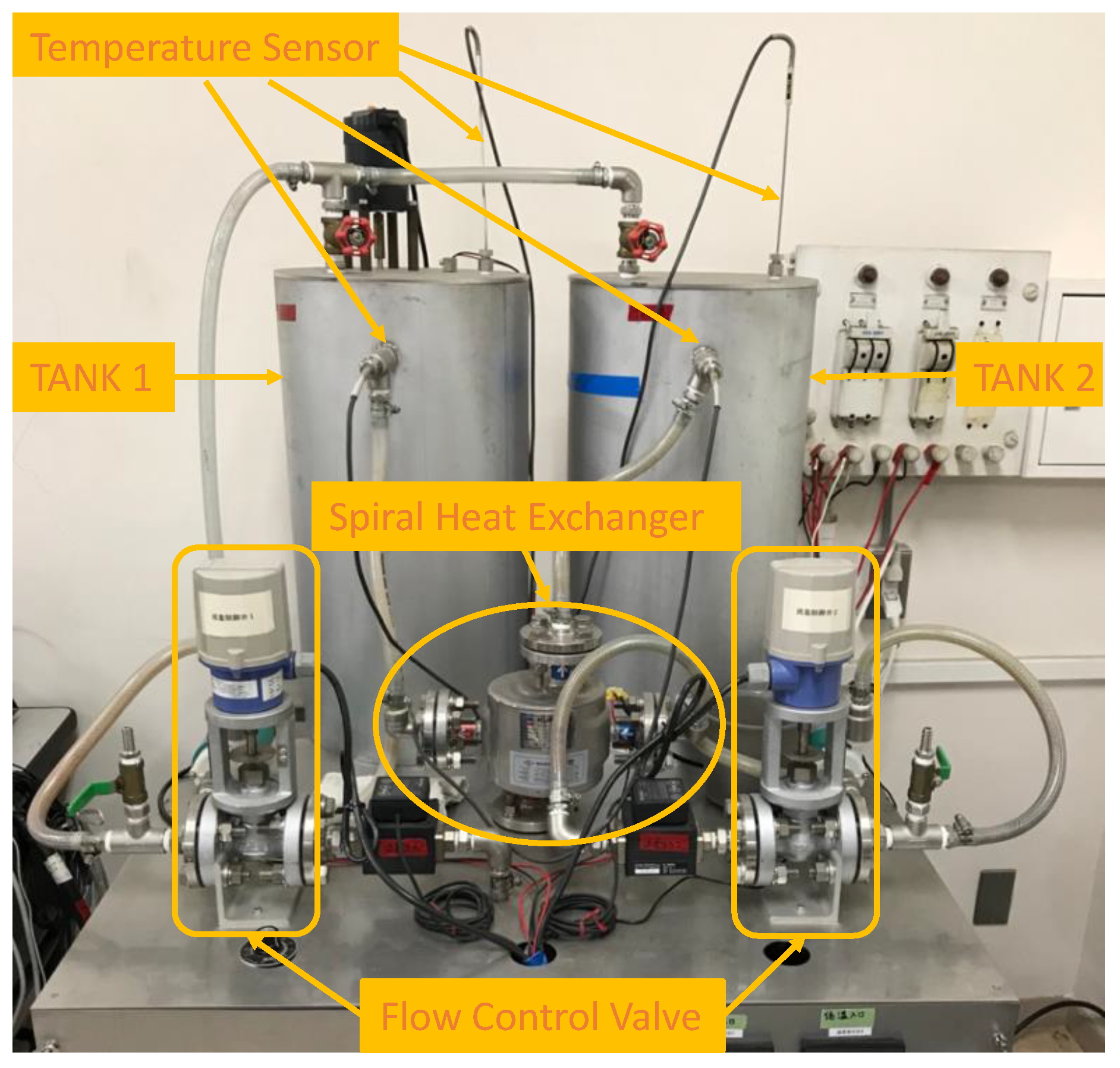
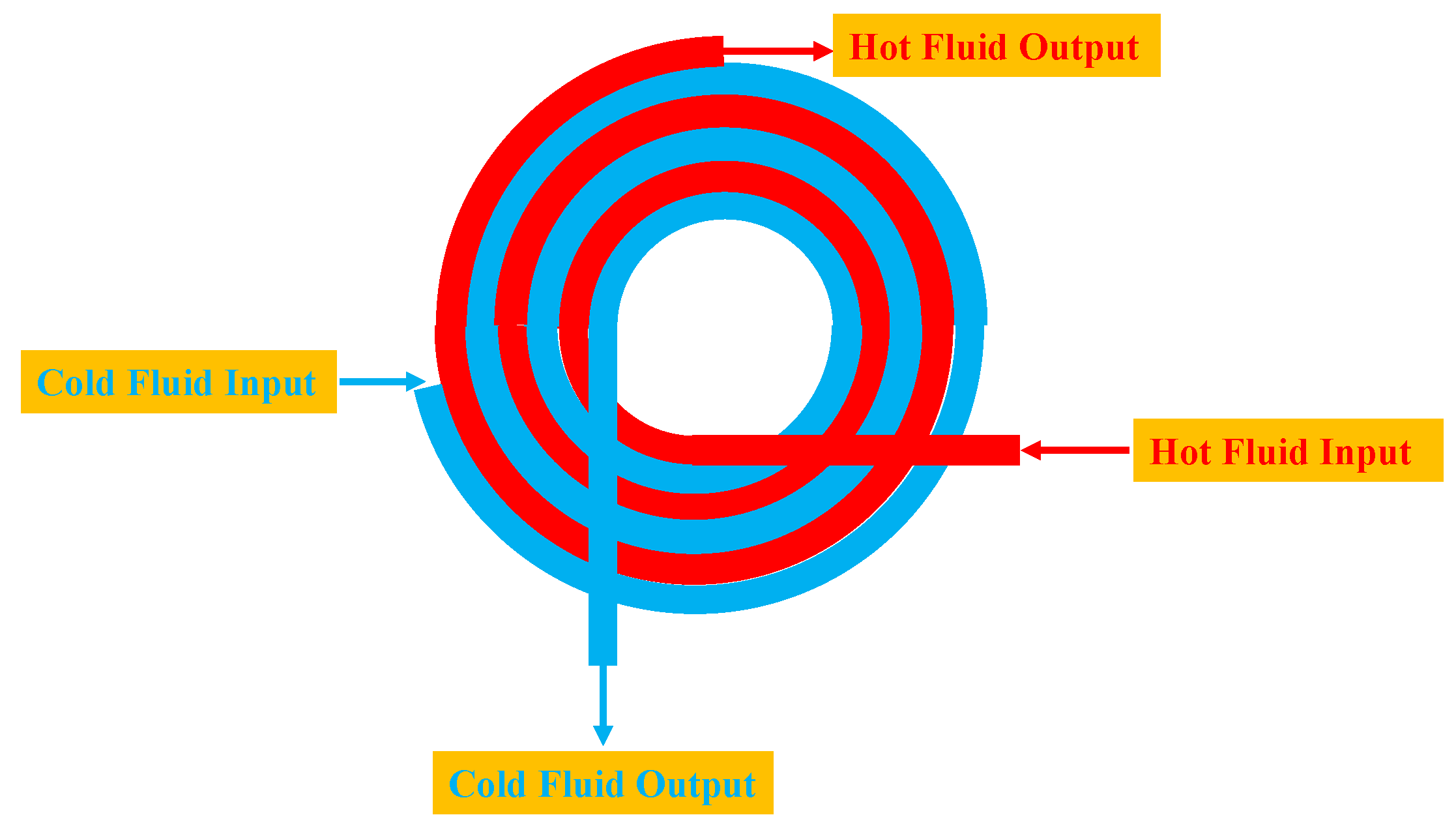
2.1. System Equipment and Modeling
2.2. Generic Particle Filter
2.3. Problem Statement
3. Particle Filter with Weight Adjustment Design for the Compensation of Sensor Noise and Time Delay
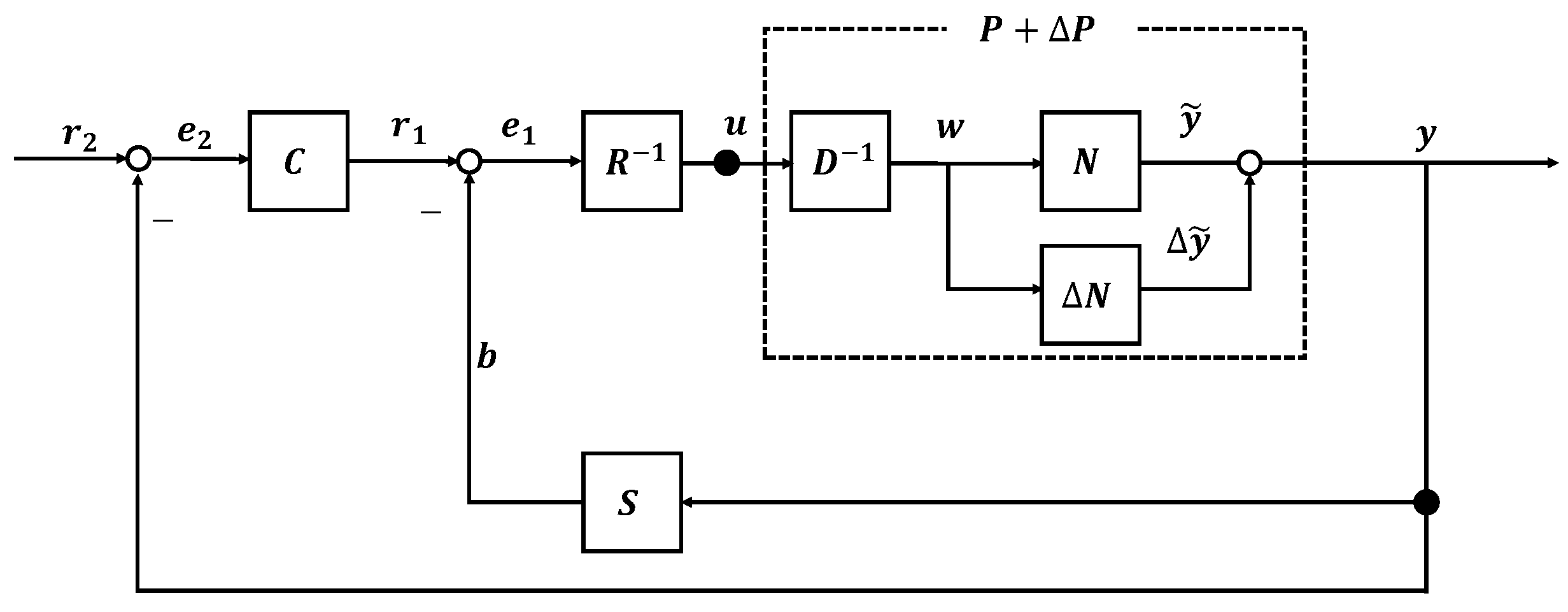
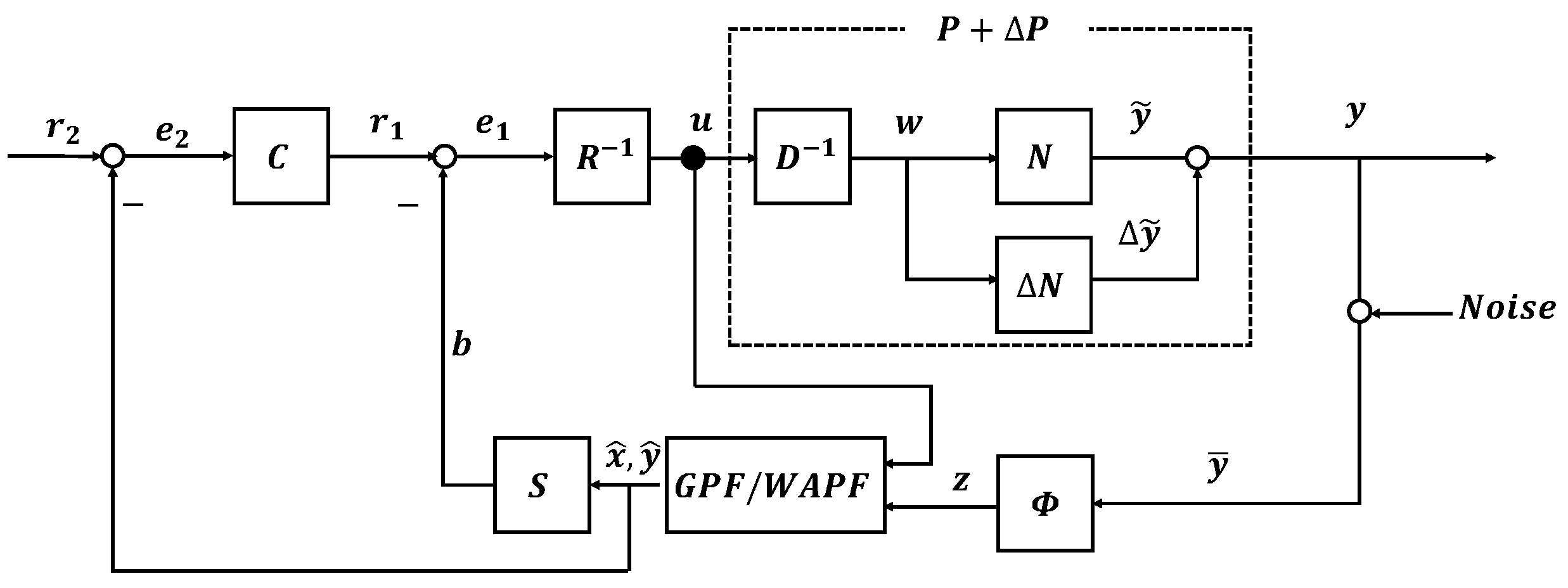
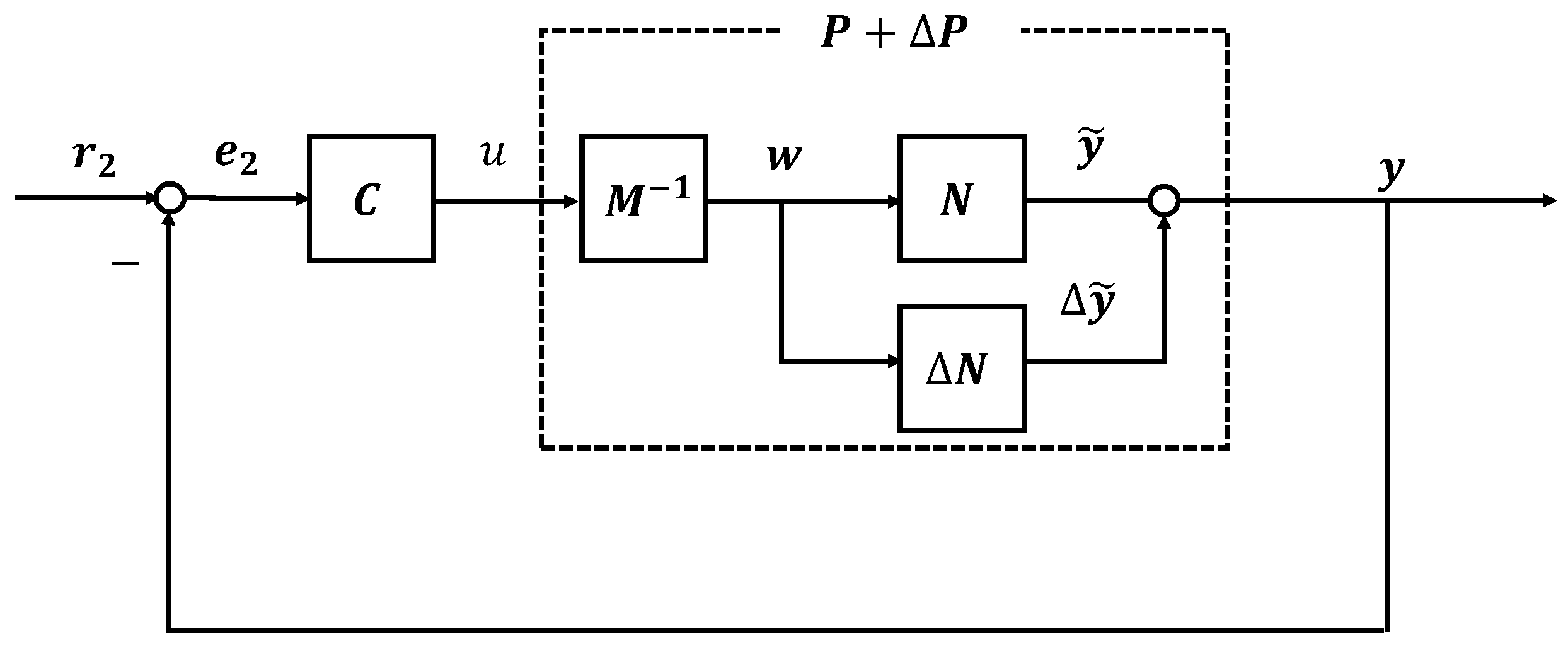
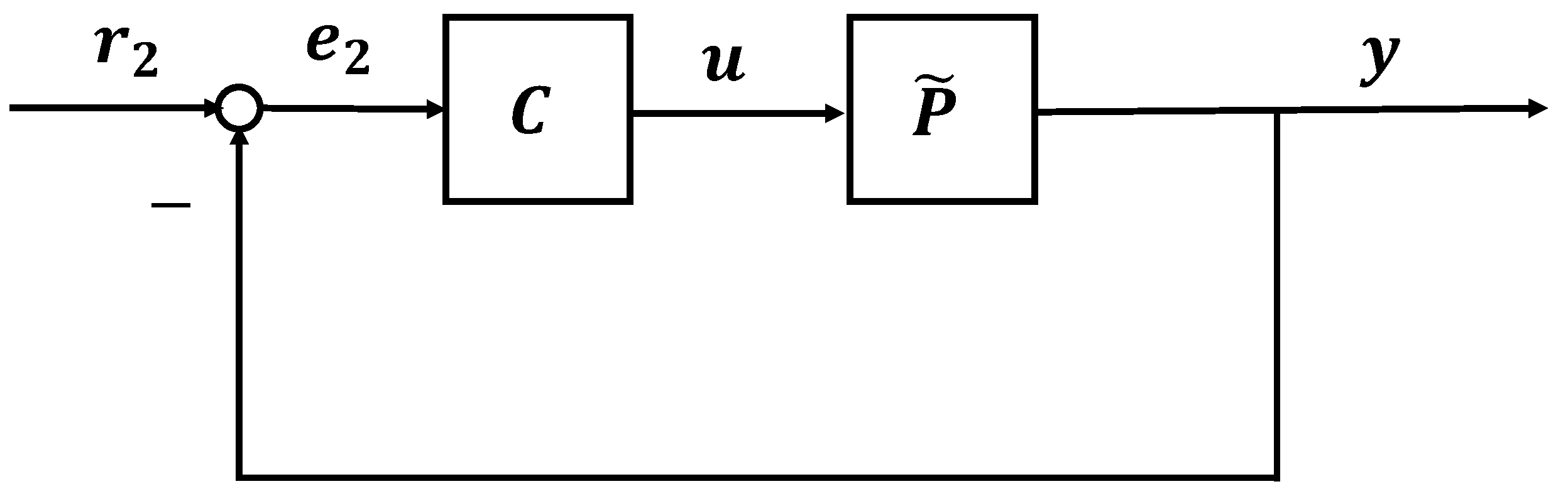
3.1. Operator Based Control System Design
3.2. Particle Filter with Weight Adjustment Design to Compensate the Influence of Sensor Noise and Time Delay
3.3. Comparison of Two Methods of Exponential Weight
| Algorithm 1 Particle filter with weight adjustment. |
Input: Output: Generate the initial N particles from its distribution, and set its weight as Loop process: while do Set the normalization sum as for do draw samples from assign weight according to Equation (3) and calculate , record the number of particles outside range end for Particle weight adjustment: if then for do if then else end if Accumulate the normalization sum as end for end if Normalize exponential weights and absolute weights Comprehensively: for do end for State estimation and output prediction: Resample particles: if then Resample N particles with replacement for do end for end if end while |
3.4. Tracking Performance of the Particle Filter Design in Overall Control System
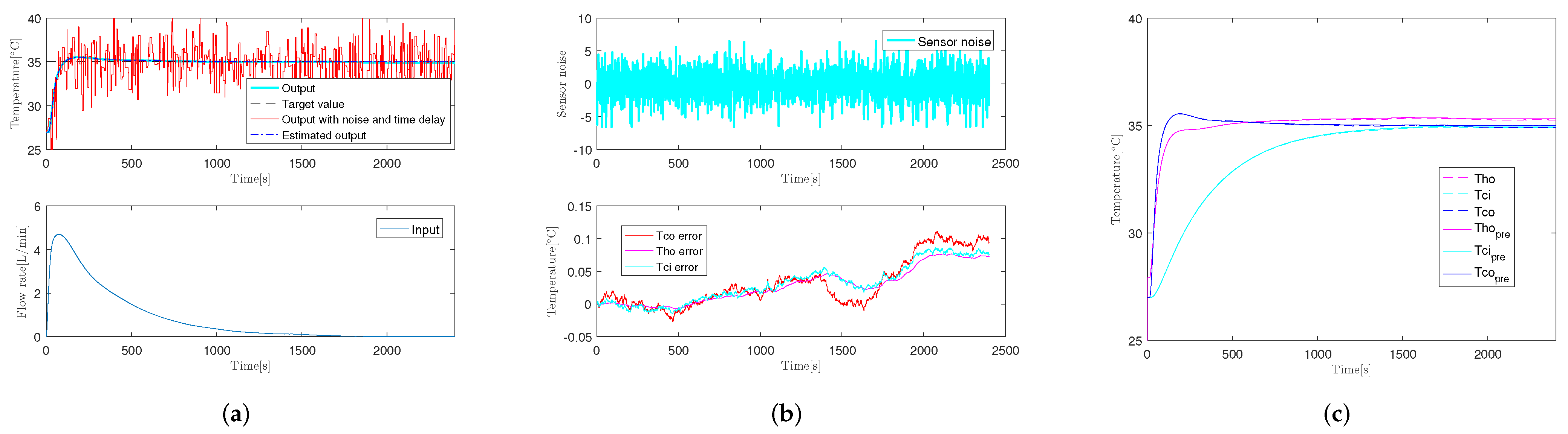
4. Simulation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1. System Equipment


Appendix A.2. System Modelling
References
- Lee, M.-T.; Chuang, M.-L.; Kuo, S.-T.; Chen, Y.-R. UAV Swarm Real-Time Rerouting by Edge Computing D* Lite Algorithm. Appl. Sci. 2022, 12, 1056. [Google Scholar] [CrossRef]
- Tseng, Y.-F.; Gao, S.-J. Decentralized Inner-Product Encryption with Constant-Size Ciphertext. Appl. Sci. 2022, 12, 636. [Google Scholar] [CrossRef]
- Lounasmaa, O.V.; Seppä, H. SQUIDs in neuro-and cardiomagnetism. J. Low Temp. Phys. 2004, 135, 295–335. [Google Scholar] [CrossRef]
- Tipsuwan, Y.; Chow, M.Y. Control methodologies in networked control systems. Control Eng. Pract. 2003, 11, 1099–1111. [Google Scholar] [CrossRef]
- Otanez, P.G.; Moyne, J.R.; Tilbury, D.M. Using deadbands to reduce communication in networked control systems. In Proceedings of the 2002 American Control Conference, Anchorage, AK, USA, 8–10 May 2002. [Google Scholar]
- Jiang, L.; Deng, M.; Inoue, A. Obstacle avoidance and motion control of a two wheeled mobile robot using SVR technique. Int. J. Innov. Comput. Inf. Control 2009, 5, 253–262. [Google Scholar]
- Deng, M.; Kawashima, T. Adaptive Nonlinear Sensorless Control for an Uncertain Miniature Pneumatic Curling Rubber Actuator Using Passivity and Robust Right Coprime Factorization. IEEE Trans. Control Syst. Tech. 2016, 24, 318–324. [Google Scholar] [CrossRef]
- Deng, M.; Saijo, N.; Gomi, H.; Inoue, A. A robust real time method for estimating human multijoint arm viscoelasticity. Int. J. Innov. Comput. Inf. Control 2006, 2, 705–721. [Google Scholar]
- Deng, M.; Inoue, A.; Zhu, Q. An integrated study procedure on real time estimation of time varying multijoint human arm viscoelasticity. Trans. Inst. Meas. Control 2011, 33, 919–941. [Google Scholar] [CrossRef]
- Pugalenthi, K.; Trung Duong, P.L.; Doh, J.; Hussain, S.; Jhon, M.H.; Raghavan, N. Online Prognosis of Bimodal Crack Evolution for Fatigue Life Prediction of Composite Laminates Using Particle Filters. Appl. Sci. 2021, 11, 6046. [Google Scholar] [CrossRef]
- Wigren, A.; Wågberg, J.; Lindsten, F.; Adrian, G.W.; Thomas, B.S. Nonlinear System Identification: Learning While Respecting Physical Models Using a Sequential Monte Carlo Method. IEEE Control Syst. Mag. 2022, 42, 75–102. [Google Scholar] [CrossRef]
- Naesseth, C.; Linderman, S.; Ranganath, R.; Blei, D. Variational sequential Monte Carlo. Proc. Mach. Learn. Res. 2018, 84, 968–977. [Google Scholar]
- Han, X.; Wu, B.; Wang, D. Firefly algorithm with disturbance-factorbased particle filter for seismic random noise attenuation. IEEE Trans. Geosci. Remote Sens. 2019, 17, 1268–1272. [Google Scholar] [CrossRef]
- Naka, H.; Deng, M.; Noge, Y. Experimental Research on Nonlinear Process Output Estimation System by DCS Devices. In Proceedings of the International Conference on Advanced Mechatronic Systems, Shiga, Japan, 26–28 August 2019. [Google Scholar]
- Martino, L.; Read, J.; Elvira, V.; Louzada, F. Cooperative parallel particle filters for online model selection and applications to urban mobility. Digit. Signal Process. 2017, 60, 172–185. [Google Scholar] [CrossRef] [Green Version]
- Doucet, A.; Johansen, A.M. A tutorial on particle filtering and smoothing: Fifteen years later. In Handbook of Nonlinear Filtering; Oxford University Press: Oxford, UK, 2009. [Google Scholar]
- Gordon, N.J.; Salmond, D.J.; Smith, A.F. Novel approach to nonlinear/non-Gaussian Bayesian state estimation. IEE Proc. F-Radar Signal Process. 1993, 140, 107–113. [Google Scholar] [CrossRef] [Green Version]
- Candy, J.V. Bootstrap particle filtering. IEEE Signal Process. Mag. 2007, 24, 73–85. [Google Scholar] [CrossRef]
- Speekenbrink, M. A tutorial on particle filters. J. Math. Psychol. 2016, 73, 140–152. [Google Scholar] [CrossRef] [Green Version]
- Xu, Y.; Deng, M. Particle Filter with Weight Adjustment and Its Application on Heat Exchange Process with Time Delay and Large Sensor Noise. In Proceedings of the 12th International Conference on Power, Energy and Electrical Engineering (CPEEE 2022), Shiga, Japan, 25–27 February 2022. [Google Scholar]
- Arulampalam, M.S.; Maskell, S.; Gordon, N.; Clapp, T. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking. IEEE Trans. Signal Process. 2002, 26, 174–188. [Google Scholar] [CrossRef] [Green Version]
- Gustafsson, F.; Gunnarsson, F.; Bergman, N.; Forssell, U.; Jansson, J.; Karlsson, R.; Nordlund, P.J. Particle filters for positioning, navigation, and tracking. IEEE Trans. Signal Process. 2002, 50, 425–437. [Google Scholar] [CrossRef] [Green Version]
- Thrun, S. Wireless communication tradeoffs in distributed control. In Proceedings of the 18th Conference on Uncertainty in Artificial Intelligence, Edmonton, AB, Canada, 1–4 August 2002. [Google Scholar]
- Lopes, H.F.; Tsay, R.S. Particle filters and Bayesian inference in financial econometrics. Int. J. Forecast. 2011, 30, 168–209. [Google Scholar] [CrossRef]
- Elfring, J.; Torta, E.; van de Molengraft, R. Particle Filters: A Hands-On Tutorial. Sensors 2021, 21, 438. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Ishikawa, K. Operator-Based Nonlinear Feedback Control Design Using Robust Right Coprime Factorization. IEEE Trans. Automat. Control 2006, 51, 645–648. [Google Scholar] [CrossRef] [Green Version]
- Bi, S.; Deng, M.; Xiao, Y. Robust Stability and Tracking for Operator-Based Nonlinear Uncertain Systems. IEEE Trans. Autom. Sci. Eng. 2015, 12, 1059–1066. [Google Scholar] [CrossRef]
- Pitt, M.K.; Shephard, N. Shephard. Filtering via simulation: Auxiliary particle filters. J. Am. Stat. Assoc. 2012, 94, 590–599. [Google Scholar] [CrossRef]
- Van Der Merwe, R.; Doucet, A.; De Freitas, N.; Wan, E. The unscented particle filter. Adv. Neural Inf. Process. Syst. 2000, 13, 584–590. [Google Scholar]
- Blanco-Claraco, J.L.; Mañas-Alvarez, F.; Torres-Moreno, J.L.; Rodriguez, F.; Gimenez-Fernandez, A. Benchmarking Particle Filter Algorithms for Efficient Velodyne-Based Vehicle Localization. Sensors 2019, 19, 3155. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, A.; Deng, M. Robust nonlinear multivariable tracking control design to a manipulator with unknown uncertainties using operator-based robust right coprime factorization. Trans. Inst. Meas. Control 2013, 35, 788–797. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Ge, X. Sufficient Conditions for a Class of Matrix-valued Polynomial Inequalities on Closed Intervals and Application to H∞ Filtering for Linear Systems with Time-varying Delays. Automatica 2021, 125, 109390. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L. State Estimation for Static Neural Networks with Time-varying Delays Based on an Improved Reciprocally Convex Inequality. IEEE Trans. Neural Netw. Learn. Syst. 2018, 29, 1376–1381. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| r | Target temperature value | 35 °C |
| Hot fluid outlet temperature | 40 C | |
| Initial cold fluid inlet temperature | 26 C | |
| Initial cold fluid temperature | 26 C | |
| Max of hot fluid flow rate | 5.4 L/min | |
| Cold fluid flow rate | 4.3 L/min | |
| a | Archimedes’ spiral equation constant | m/rad |
| Thermal conductivity of SUS304 | 16.7 W/(m·C) | |
| Reynolds number | 22,000 | |
| Prandtl number | 7 | |
| A | Cross-section area of flow path | m |
| Specific heat of water | 4.2 kJ/(kg·C) | |
| Density of water | 1000 kg/m | |
| Thickness of heat exchanger’s wall | m | |
| Width of flow path | m | |
| m | Mass of cold fluid flow rate | 0.0717 kg |
| Uncertainty of m | 0.015 kg | |
| M | Mass of cold fluid in TANK2 | 31.8 kg |
| - Design parameter | 0.3 L/min | |
| - Design parameter | 0.03 | |
| Design parameter for valve of hot fluid | 1.25 | |
| Design parameter for flow change of hot fluid | 0.026 | |
| K | Design parameter of | 0.7 |
| Proportional gain of C | 2000 | |
| Integral gain of C | 97 | |
| Sampling time | 1 s | |
| Simulation time | 2401 s | |
| Standard deviation of likelihood function | 0.01 C |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Y.; Deng, M. Particle Filter Design for Robust Nonlinear Control System of Uncertain Heat Exchange Process with Sensor Noise and Communication Time Delay. Appl. Sci. 2022, 12, 2495. https://doi.org/10.3390/app12052495
Xu Y, Deng M. Particle Filter Design for Robust Nonlinear Control System of Uncertain Heat Exchange Process with Sensor Noise and Communication Time Delay. Applied Sciences. 2022; 12(5):2495. https://doi.org/10.3390/app12052495
Chicago/Turabian StyleXu, Yuanhong, and Mingcong Deng. 2022. "Particle Filter Design for Robust Nonlinear Control System of Uncertain Heat Exchange Process with Sensor Noise and Communication Time Delay" Applied Sciences 12, no. 5: 2495. https://doi.org/10.3390/app12052495
APA StyleXu, Y., & Deng, M. (2022). Particle Filter Design for Robust Nonlinear Control System of Uncertain Heat Exchange Process with Sensor Noise and Communication Time Delay. Applied Sciences, 12(5), 2495. https://doi.org/10.3390/app12052495