2.1. General Analytical Solution
The analytical solution of the plates considers material and geometric properties. We assume three planes of symmetry, i.e., nine independent constants. The individual equations determine the relationship between the stress and strain components, which we can write in the simplified form of the abbreviated indices of the generalized Hooke’s law in the form [
13]
where
σi—stress tensor,
cij—matrix of elastic coefficients, and
εj—strain tensor.
If the coordinate axes coincide with the material axes (axes of body symmetry), the relationship between the stress components and the deformation components can be used. The relationships between stress and strain components can also be expressed in inverse form
where
sij—matrix of elastic modules. Then, for the coordinate system
x,
y,
z, we can rearrange Equation (1) into equation using Equation (2):
where coefficients
sij are determined from
By applying Betti’s theorem, we get the relationships between the elastic constants
Ei for an orthotropic material:
By further arrangement using Equations (4) and (5), it is possible to derive inverse relations, and then for individual stresses we get [
13]
Assuming small deformations, i.e., according to geometric linear theory, the components of the deformation tensor are a function of the displacement vector in the Cartesian coordinate system:
Assuming
εz = 0, it follows that the vertical displacement
w of the general point of the median plane is not a function of
z.
From the relations (7), the displacement in the
x-direction, or in the
y-direction
From the last two relations of the system (7) after integration (integration functions are zero under transverse loading) we get
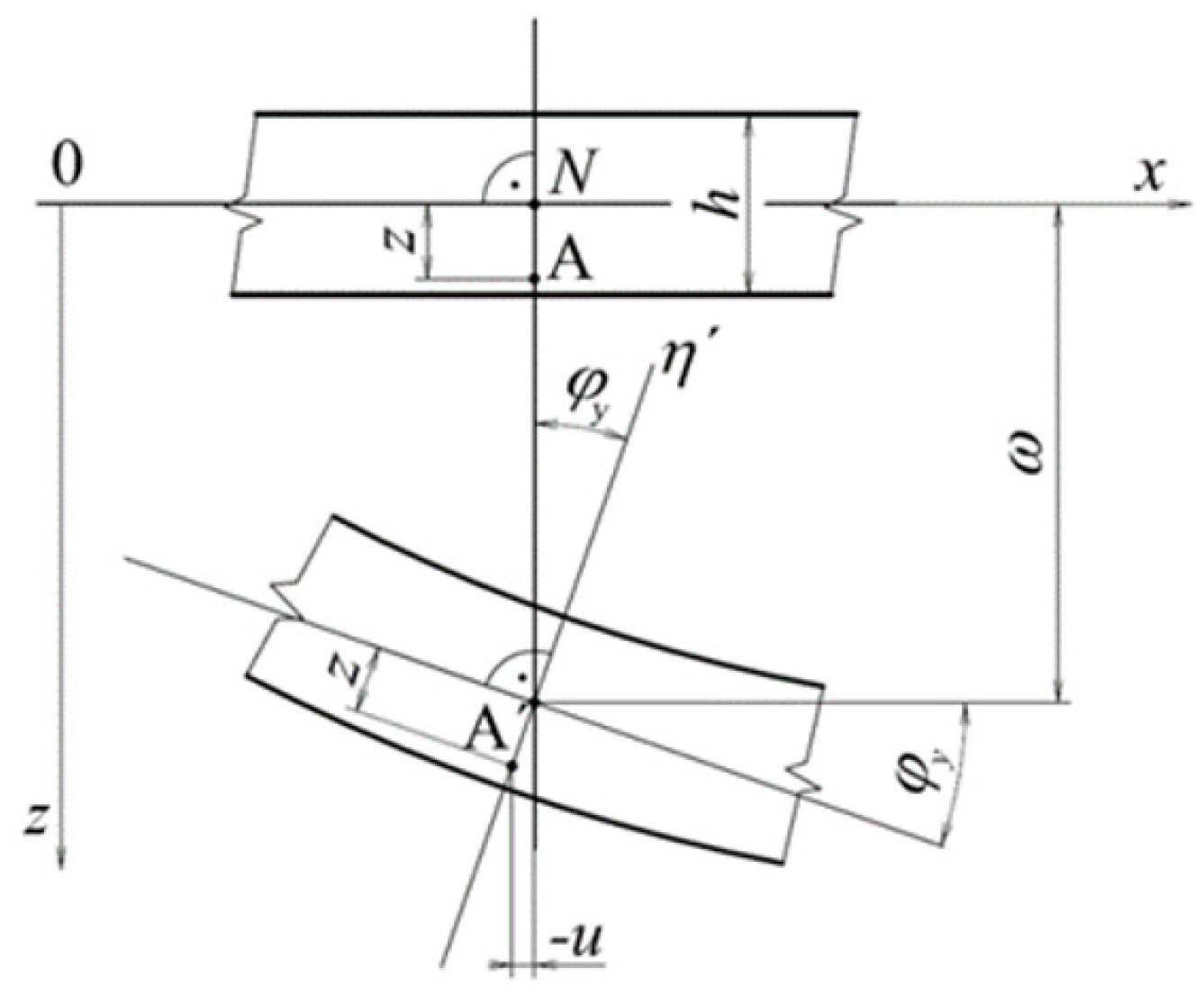
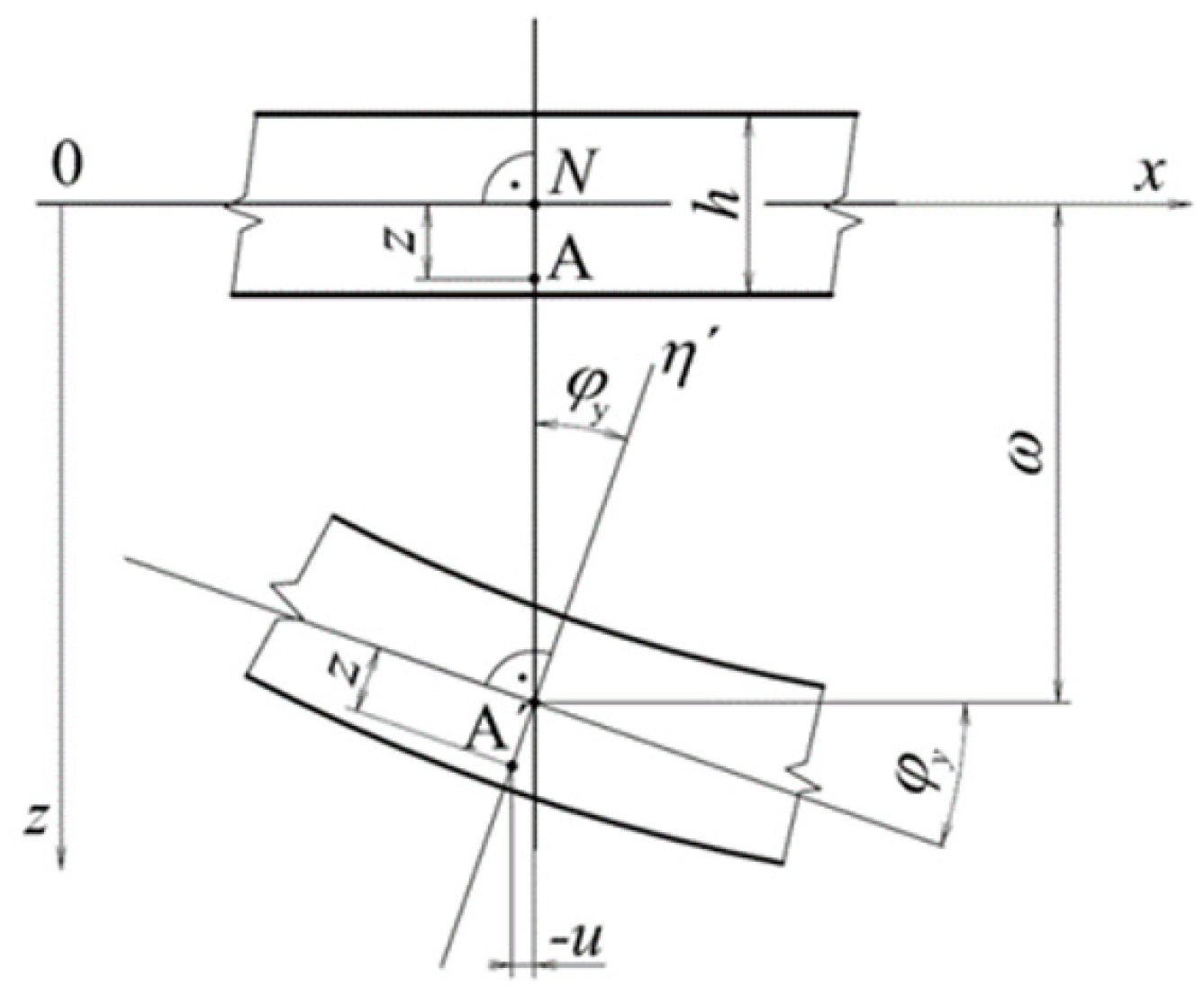
The above relations are based on the analysis of the displacement of the general point A of the normal to the median surface at the distance
z (
Figure 3).
After deformation of the plate due to the excitation load, the tangent to the median surface at point A rotates by an angle
φ with respect to both the
x-axis and the
y-axis. Then, the displacements in the direction of the
x and
y axes can be described by relations using the angles of rotation
φx and
φy
where the z-axis displacement is a function
w =
w(
x,
y).
Then, using Equations (10)–(12), Equation (6) can be rearranged to the form
The three degrees of freedom of the plate element, i.e., the displacement w in the z-axis direction, the rotation around the x-axis by the angle φx and the rotation around the y-axis by the angle φy, correspond to the three motion equations of forces in the z-direction and moments to axes parallel to the x and y directions.
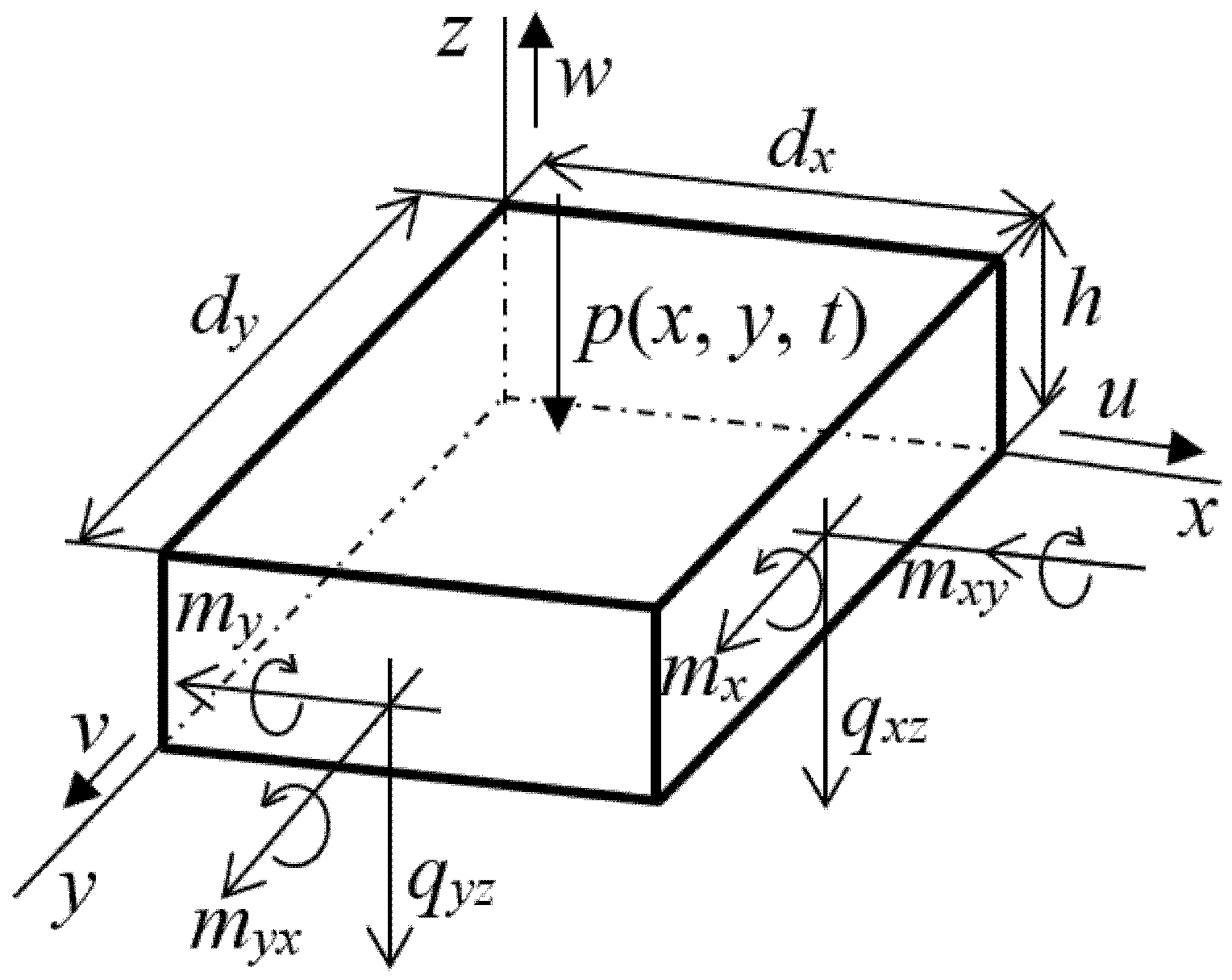
In thin plate theory, these equations of motion are usually formulated in integral form for the plate element
dx ×
dy ×
h, using specific shear forces and bending and torsional moments (
Figure 4).
The specific shear forces in the
z direction act in a plane perpendicular to the axis
x and
y.
Specific bending moment (
mx) acting in a plane parallel to the
yz plane whose vector is parallel to the
y-axis, specific bending moment (
my) acting in a plane parallel to the
xz plane, the vector parallel to the
x-axis and specific torques (
mxy =
myx) acting in planes of the element parallel to the planes
xz and
yz, whose vectors are perpendicular to these planes are defined:
These specific moments can be expressed with (13) as a function of the displacements
where
Dx,
Dy—stiffness modules in the direction
x and
y,
Dxy—torsional stiffness modulus.
After further modifications, three equations of motion can be formulated for the forces and moments acting on the plate element
dxdyh.
where
Jp—inertia material moment of the element
dxdyh in axis
x, or
y, passing through the center of the element provided
dx <
h,
dy <
h,
h—plate thickness,
p—the function of the excitation load,
ρ—plate density.
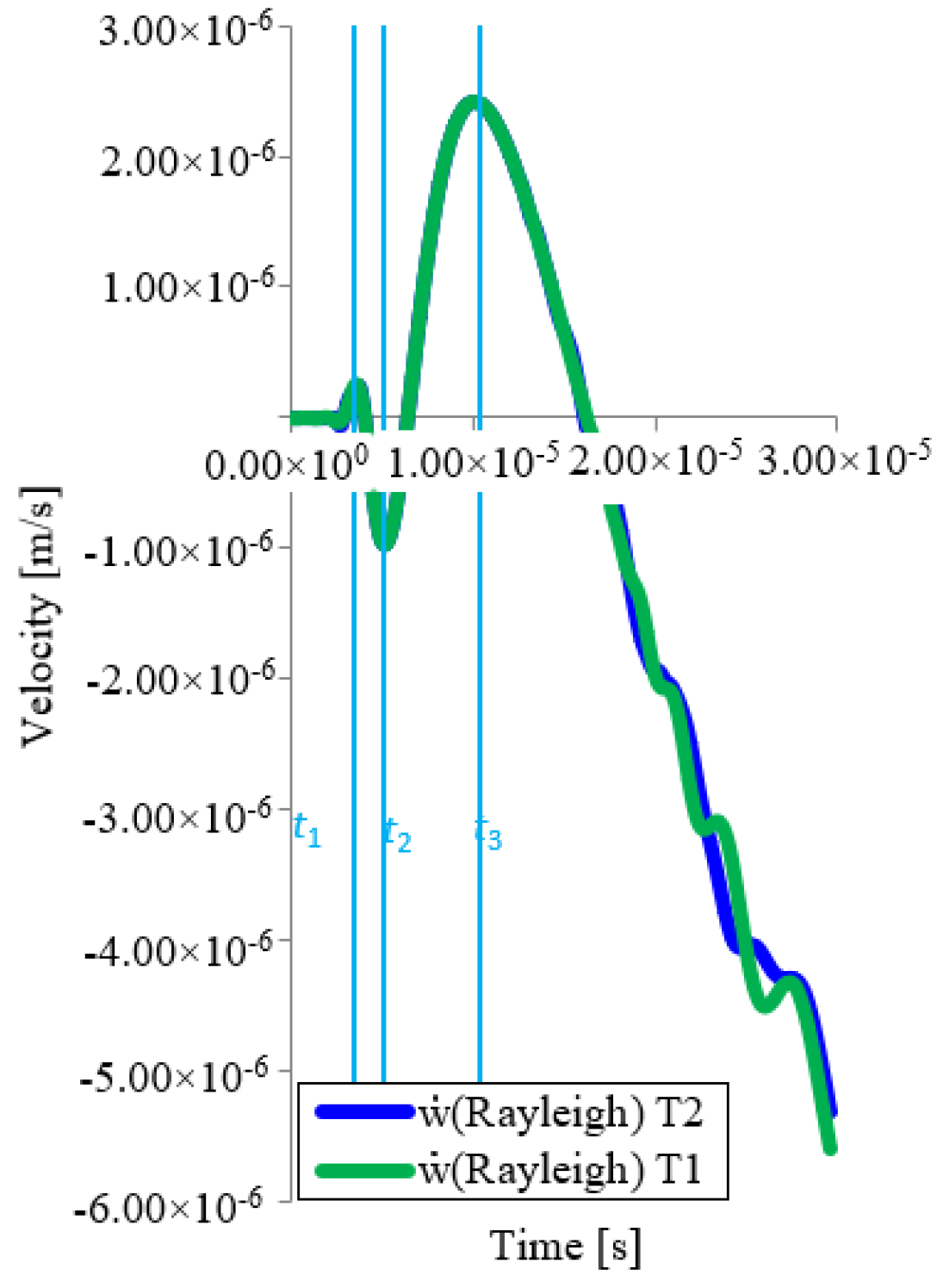
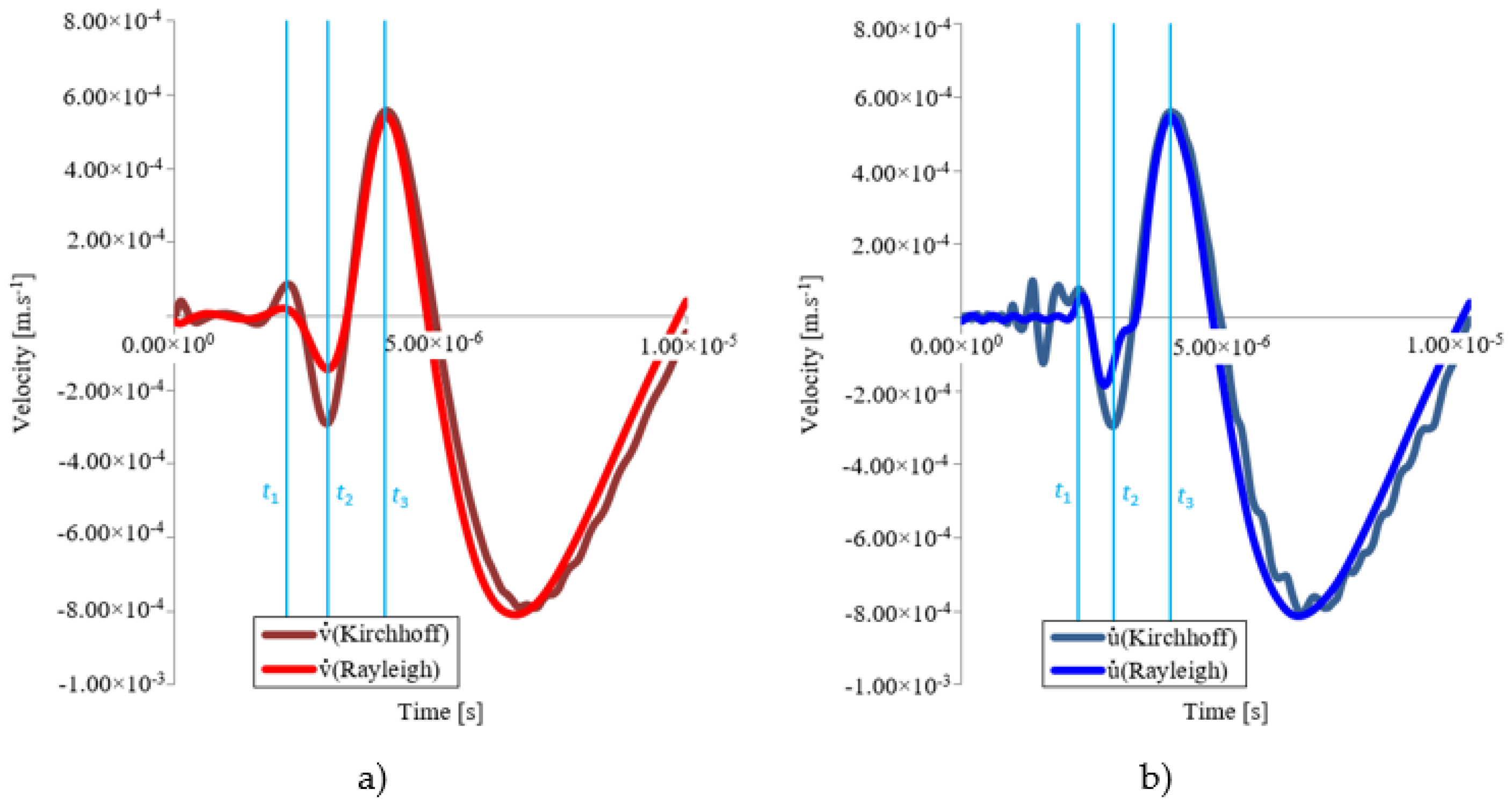
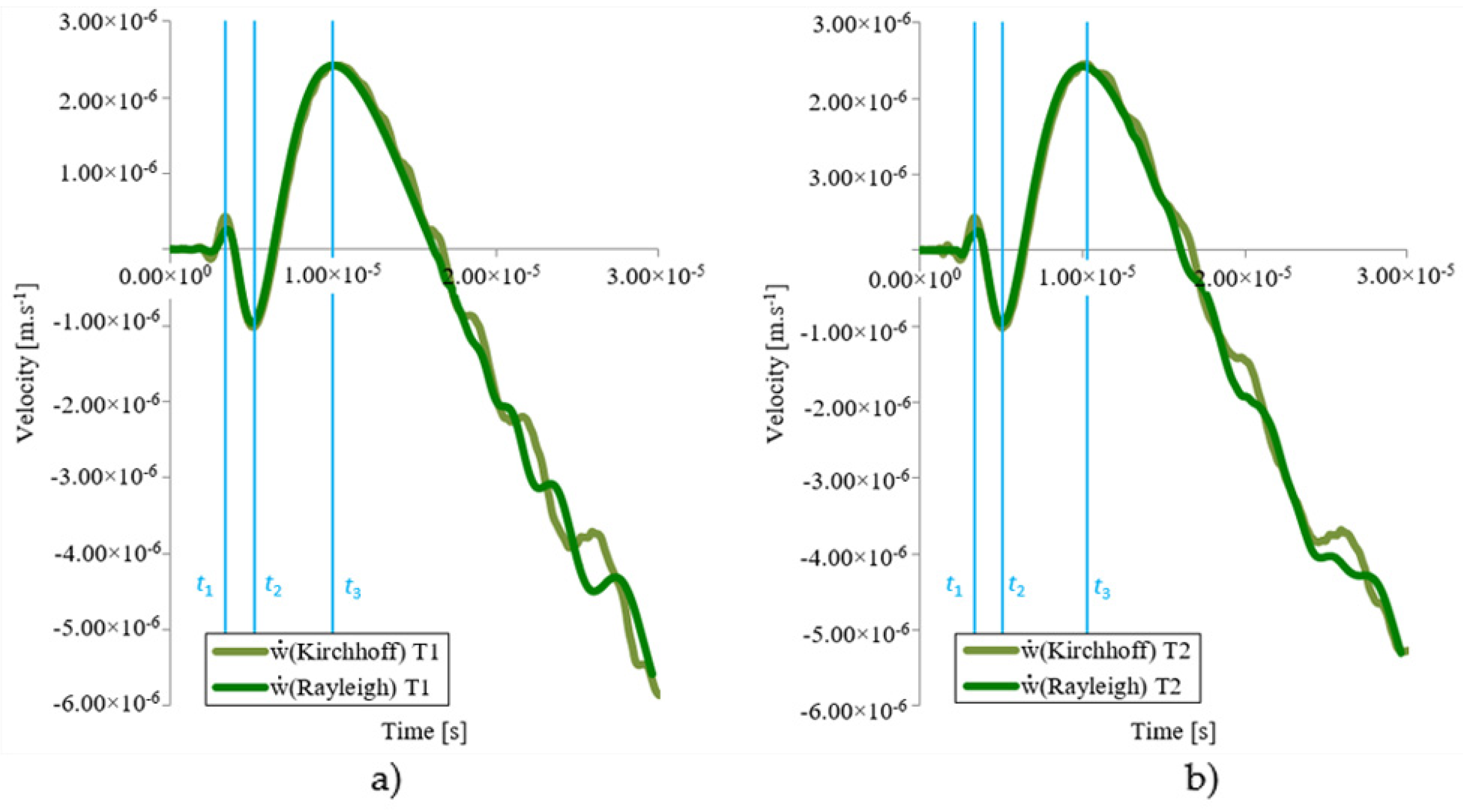
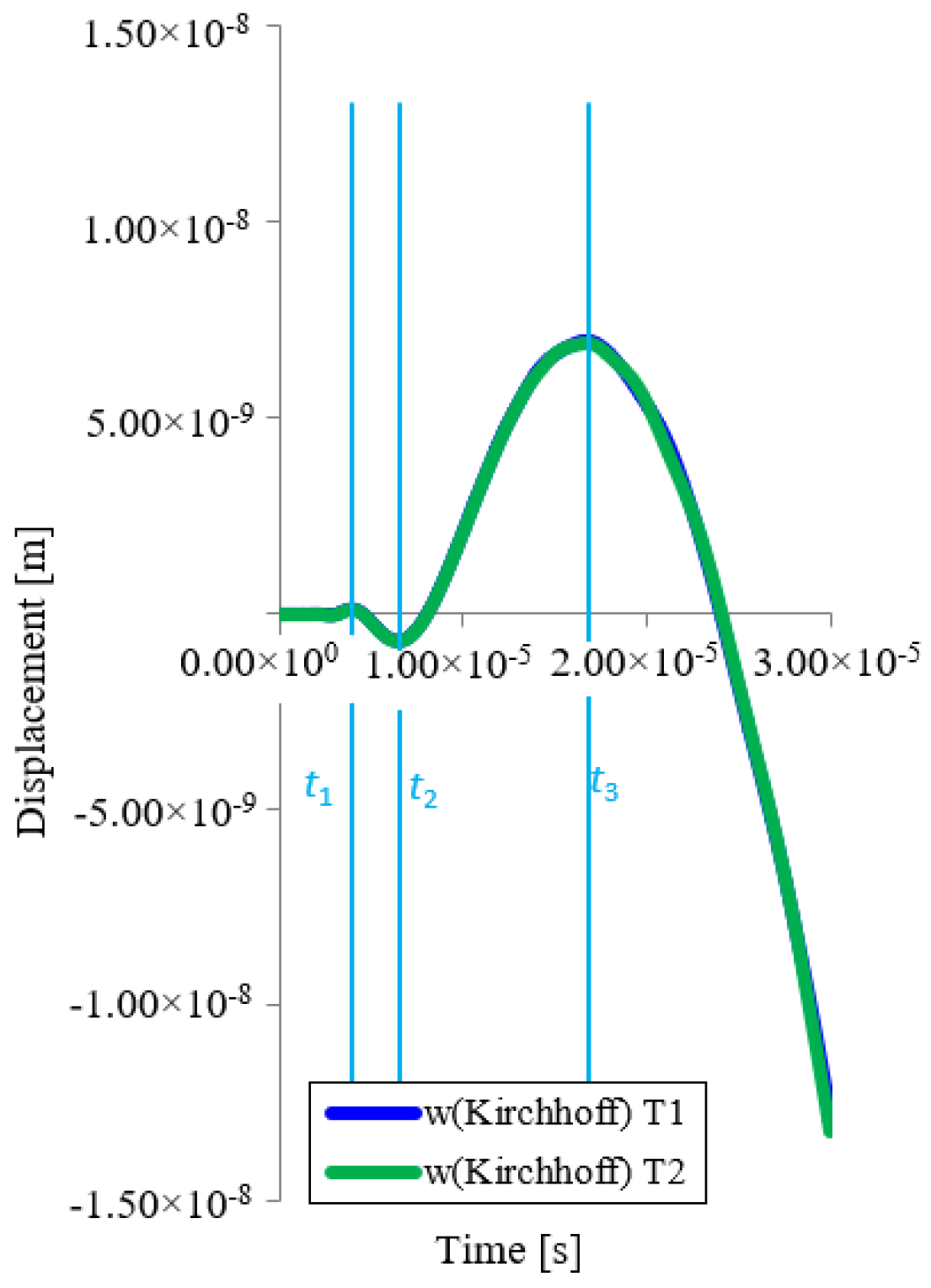
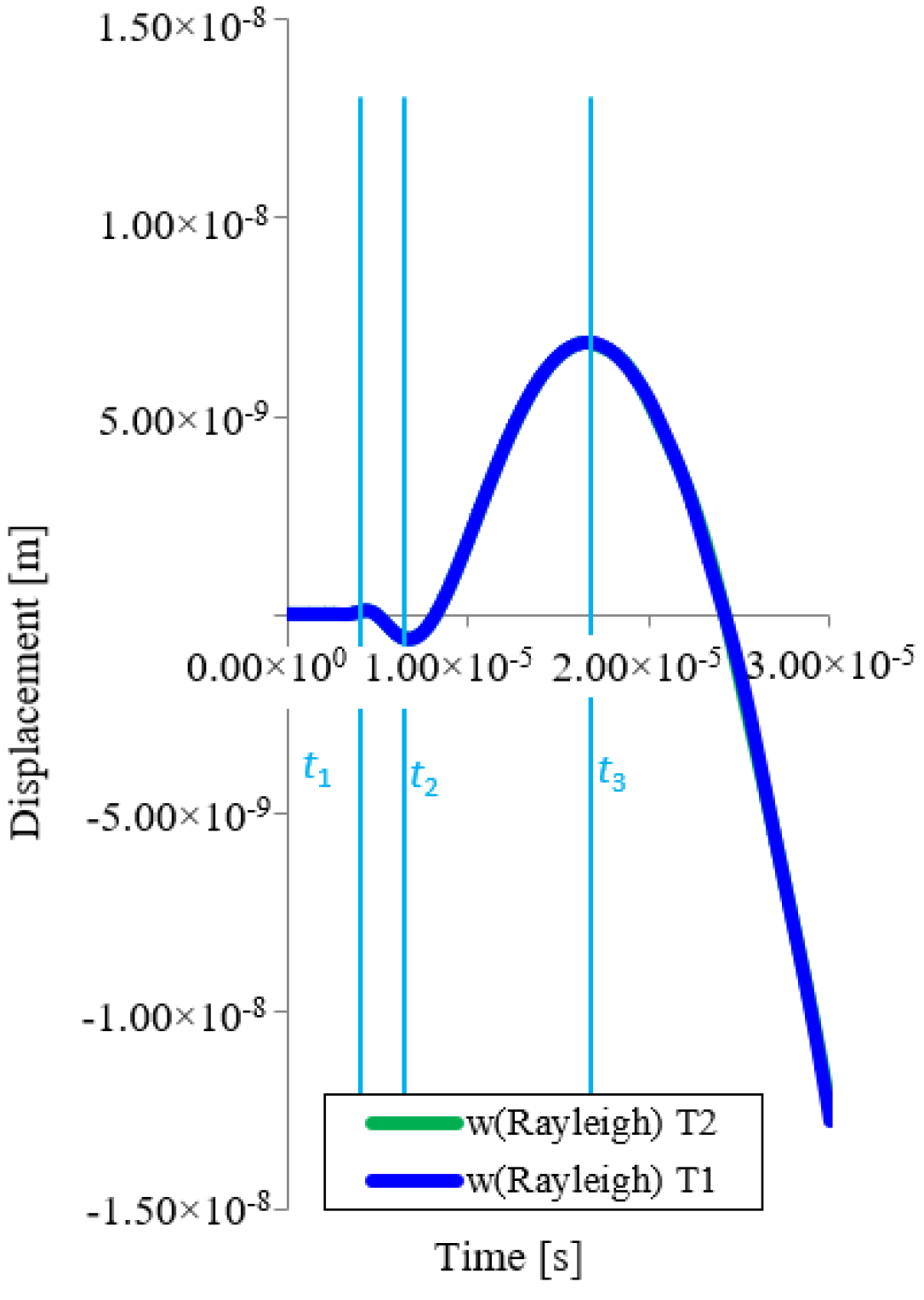
For moment equations, the right side respects the effect of the rotation of the plate element around the x and y axis—Rayleigh’s model. For Jp = 0. These equations have the character of moment-static equilibrium, when the effect of inertial moments, or cross-section rotation are neglected, which corresponds to the original Kirchhoff model.
By further arrangement (17) and using (12), (16) we get for Rayleigh’s model (
Jp ≠ 0)
For the Kirchhoff model
Jp = 0 and relations for
qxz and
qyz are clear. Substituting (18) into (17) we get for the displacement
w =
w(
x,
y,
t)
By solution (19), e.g., by Fourier method we get for
wSubstituting (20) into (19) and arrangement we get
We determine the functions
X(
x) and
Y(
y) from the relations
where
α and
β are constants,
X(
x),
Y(
y) are functions of coordinates that describe the geometry of the plate deformation and must also satisfy the boundary conditions [
19,
20].
By further arrangement and application of the boundary conditions, a relation is derived for the individual functions
X(
x) and
Y(
y) in the form
After substituting and arrangement, the function
w(
x,
y,
t)
Substituting (24) into (20) and adjusting, we get an ordinary differential equation for the function
T(t):
where
which is the equation of free harmonic oscillating motion.
Then, the external load
p (
x,
y,
t) can be expressed in the form
where
XF(
x) and
YF(
y) are geometric load distribution characteristics,
TF(
t)—dimensionless function of time, and
F0—maximum value of external excitation load.
For further solutions using the previous relationships, the dimensionless load parameter in the shape is determined:
The external excitation load always acts on the upper (face) surface of the plate in a certain small area of different shape (
Figure 5). The continuous load has different intensities. The problem is if we want to compare the theoretical results of the analysis of stress wave propagation (point load) with the experimental solution (continuous load in the surface), because the point load cannot be realized in the experiment.
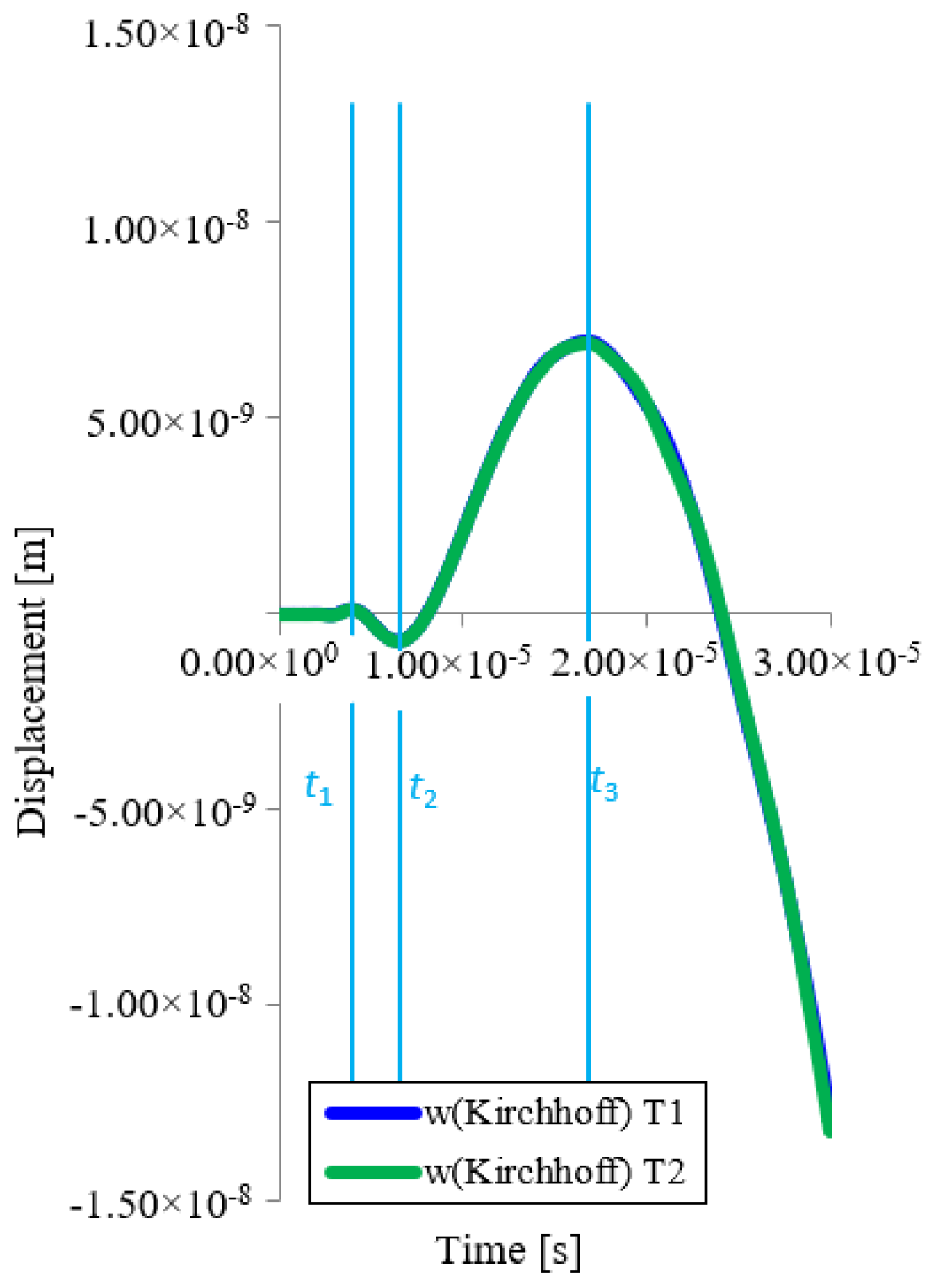
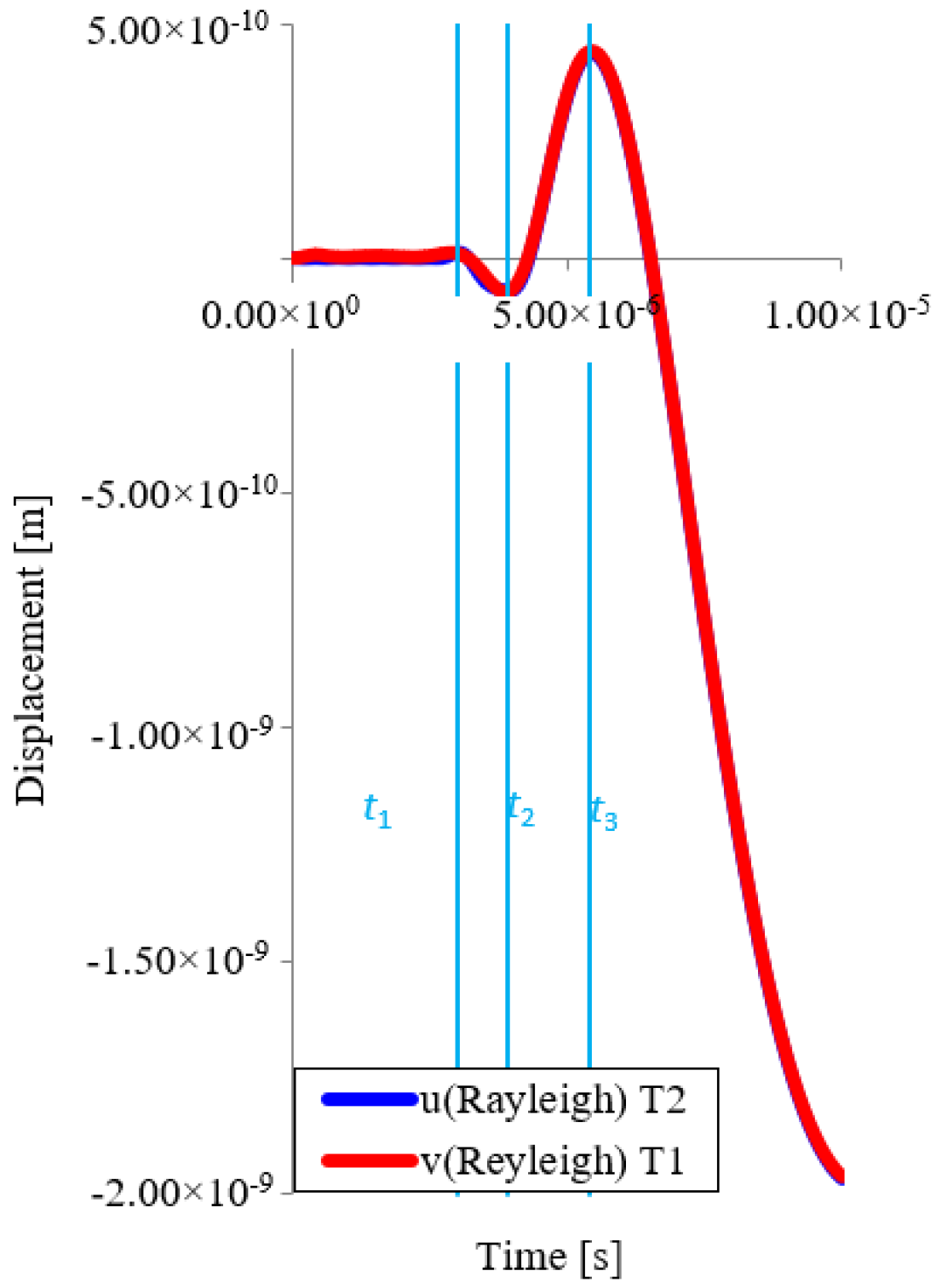
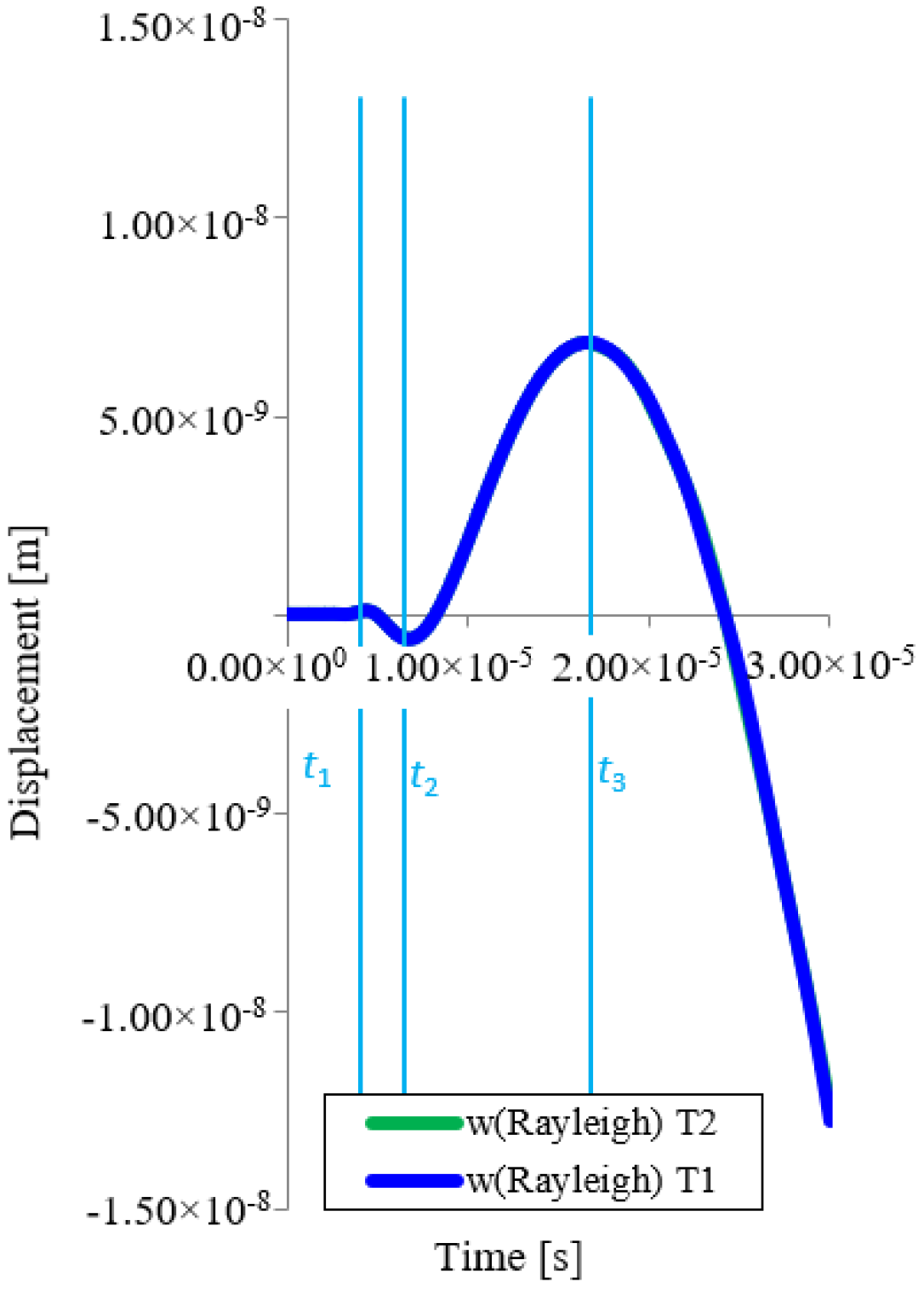
When solving oscillation of plates, we are interested in the time course of the deformation of a thin plate caused by the excitation load, i.e., the function
w =
w(
x,
y,
t). This solution, using the previous relationships and the unit jump function, can be obtained in the form of a double series:
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}