
Numerical Performance Investigation of a Hybrid eCVT Specialized Agricultural Tractor


Abstract
:1. Introduction
- Peak power performance comparable with those of a conventional tractor but with a downsized diesel engine and a simplified gearbox. The last point is not something that was considered in other works that wanted to keep the same tractor gearbox.
- Increased overall efficiency with fuel saving ranging from 10% in the most heavy PTO loading scenarios up to 20% in heavy trailer transportation.
- Capability for full electric operations decoupling the ICE and using the two electric machines in a dual-input-motor configuration using the energy stored in the battery pack.
2. Case Study
- vehicle and trailer dynamics;
- engine;
- gearbox and clutches;
- PTO loads.
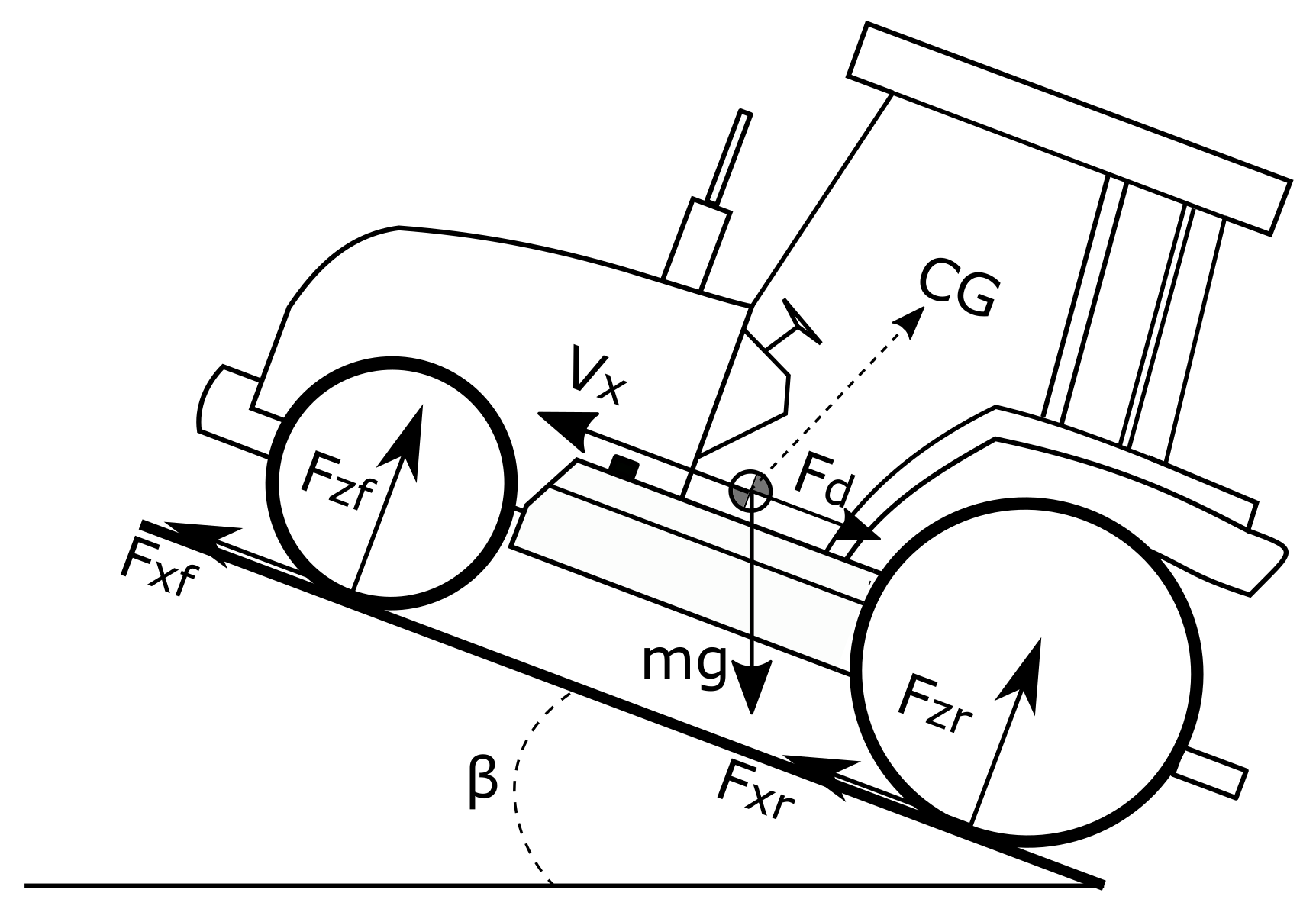
- a, b, and h represent the relative position of the centre of gravity of the vehicle with respect to the front and rear axles;
- m is the tractor mass; g the acceleration of gravity;
- is the road slope angle;
- is the vehicle longitudinal speed;
- is the aerodynamic drag force as,, air density; and , drag coefficient, a frontal cross-sectional area of the vehicle. However, this contribution is almost negligible for this specific application.
- and are contact forces between wheels and ground on the longitudinal direction (front and rear axle).
- and are normal contact forces between wheels and ground (front and rear axle).
- is diesel fuel consumption at partial load and full throttle (gal/h);
- is diesel fuel consumption at partial load and reduced throttle (gal/h);
- X is the actual engine load expressed as the ratio of the actual engine output power over the maximal power available at the same speed (-);
- is the nominal engine power (hp);
- N is the ratio between actual engine speed and nominal speed at which is evaluated.
3. Hybrid eCVT Powetrain
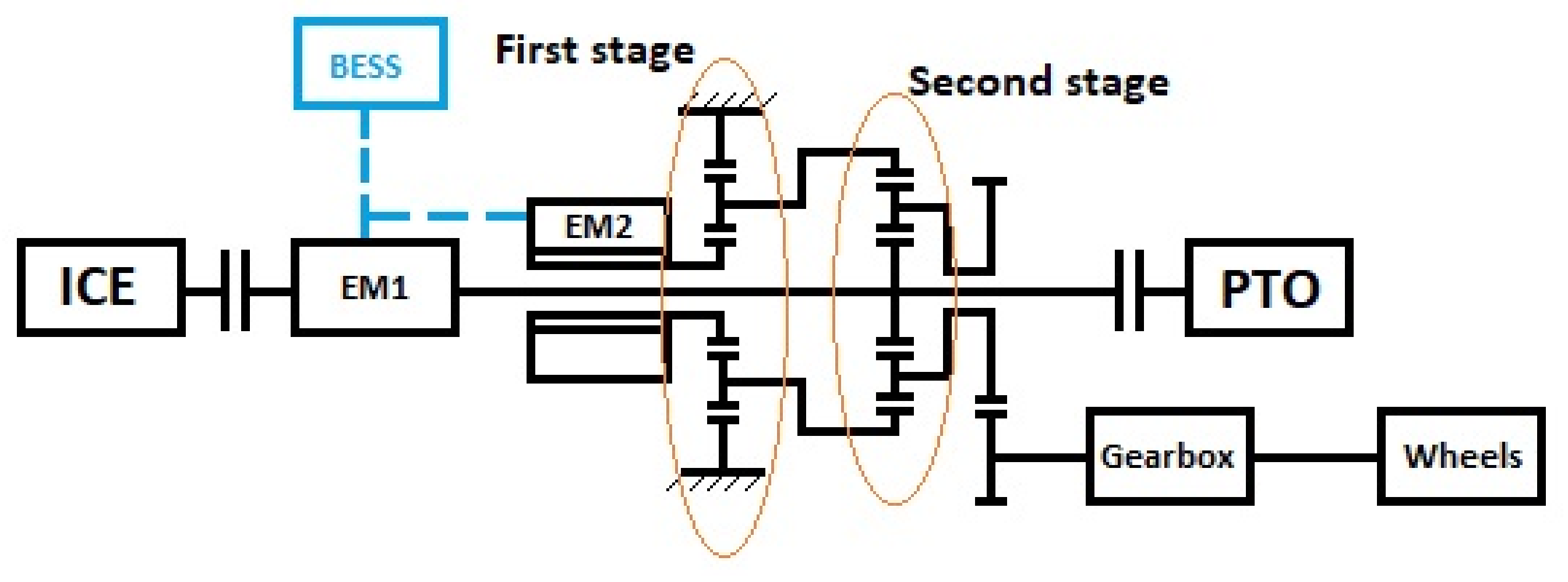
3.1. Architecture and Components
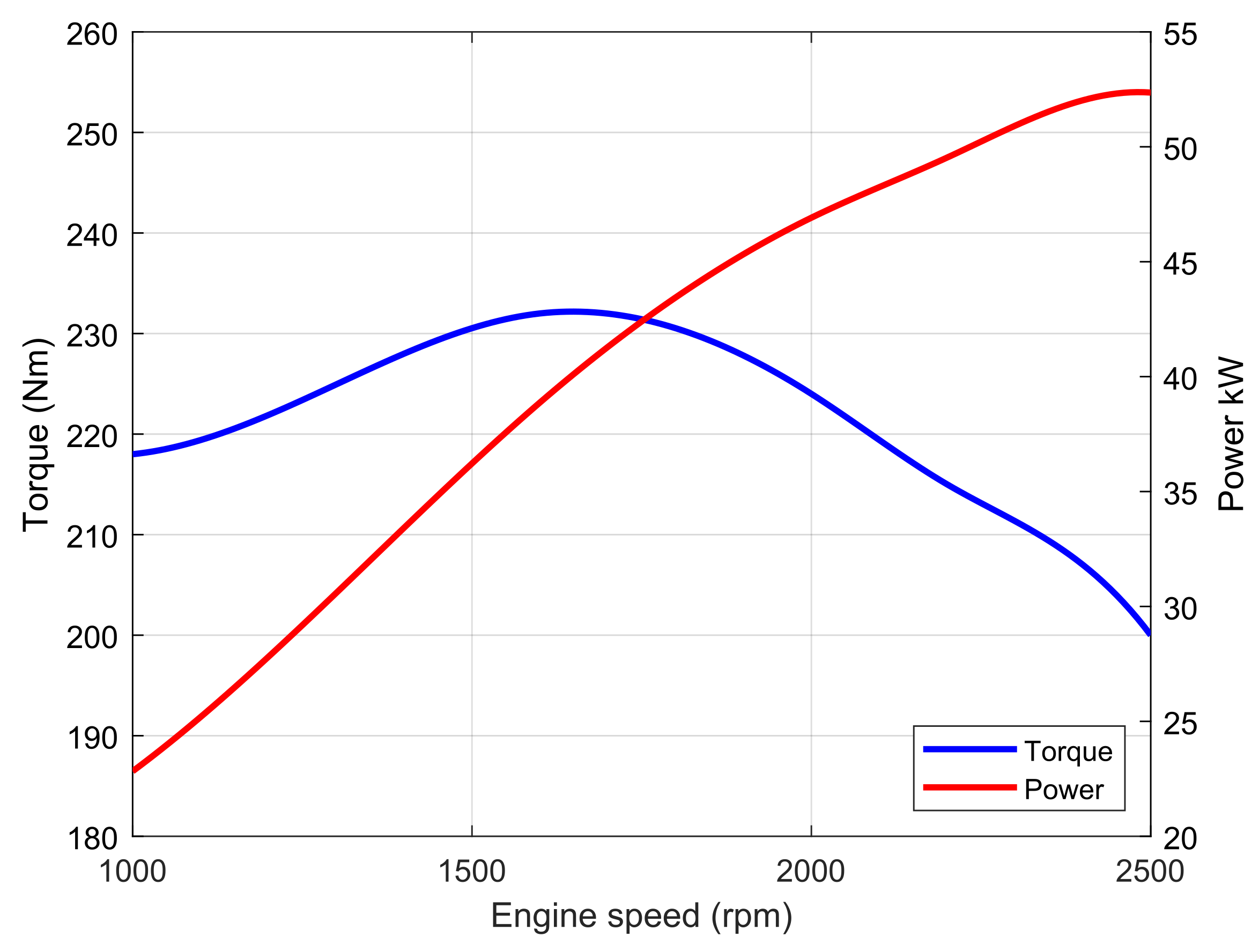
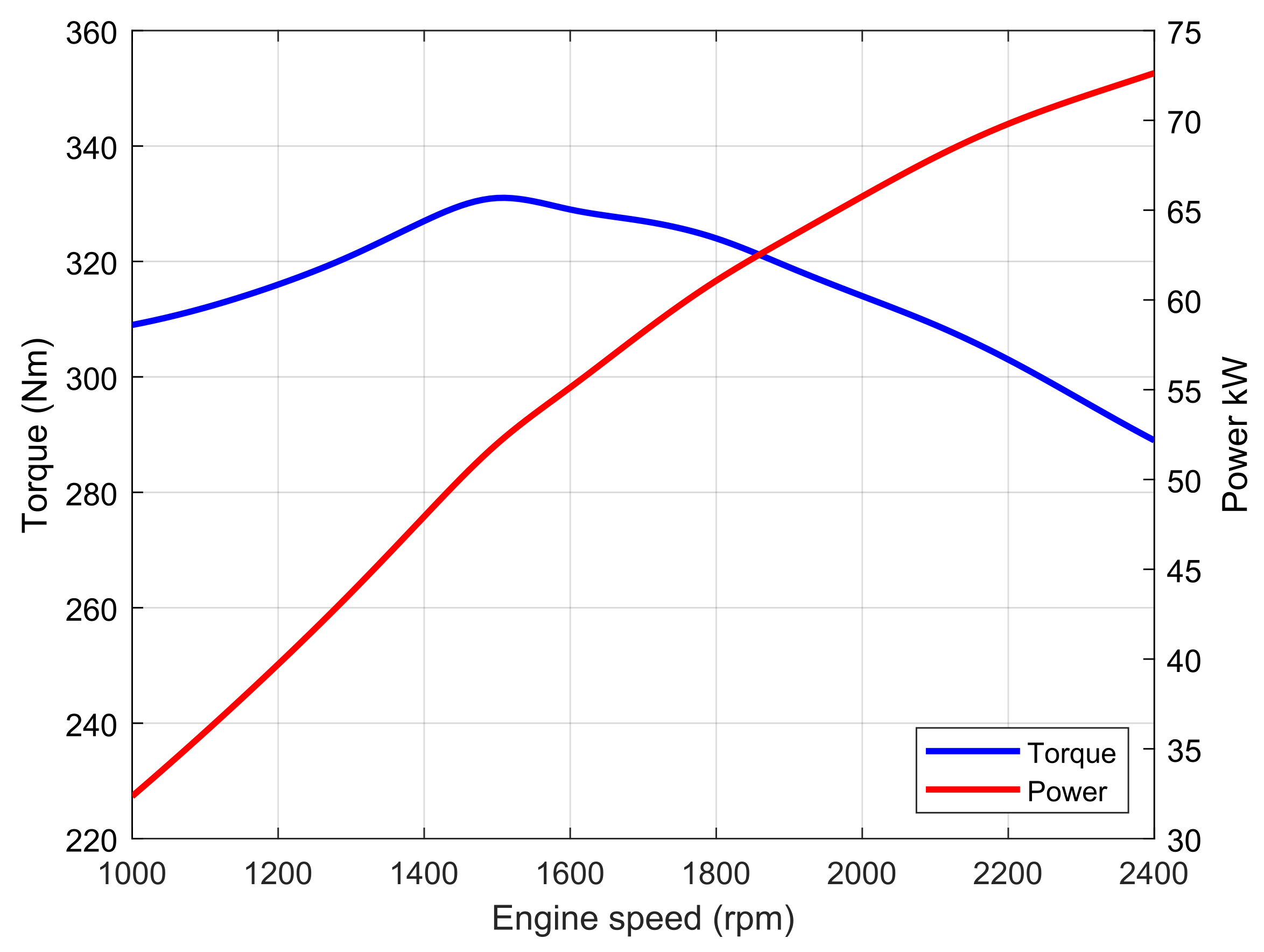
- Specialized tractors are usually equipped with high power diesel engines but, for a large part of their operative life, they work at medium–low load, which translates into suboptimal overall efficiency, and thus excessive fuel consumption. Instead, a downsized ICE working at higher percentage loads that are closer to the nominal design value can achieve better fuel efficiency.
- Tractors’ emission limits are imposed by the NRMM regulation, which classifies engines according to their application and nominal rated power. The larger the engine, the higher the pollutant production per unit of work. Therefore, an oversized diesel engine has stricter restrictions about the pollutants that it is allowed to produce; thus, it would require large volumes for exhaust gas aftertreatment systems. This is not compatible with compact specialized tractors.
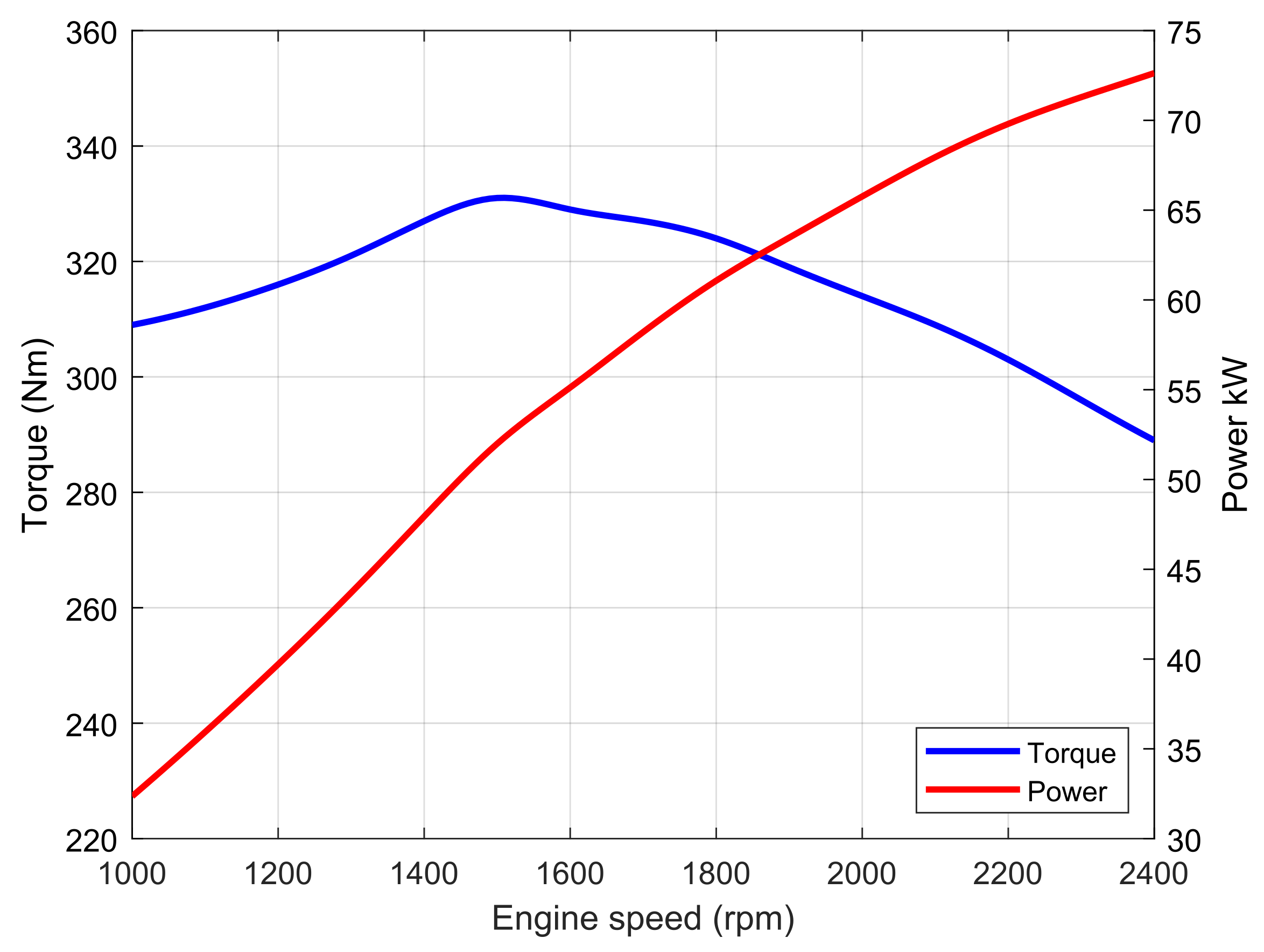
- at low speed below 1100 rpm, torque could be amplified up to twice the nominal value;
- above 1100 rpm, torque amplification should be limited by the rated power value for the machine.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EM1 nominal power | 35 kW |
| EM1 maximal torque | 145 Nm |
| EM1 nominal efficiency | 93% |
| EM2 nominal power | 30 kW |
| EM2 maximal torque | 130 Nm |
| EM2 nominal efficiency | 93% |
- helps the ICE in providing power to the PTO;
- is turned by the ICE in order to provide electric power to EM2 for an electric power split;
- recirculates power when EM2 acts as a brake for low vehicle speed, helping the ICE in parallel.
- is the used capacity;
- is the nominal capacity;
- is the state of charge of the battery pack.
3.2. Hybrid eCVT Control
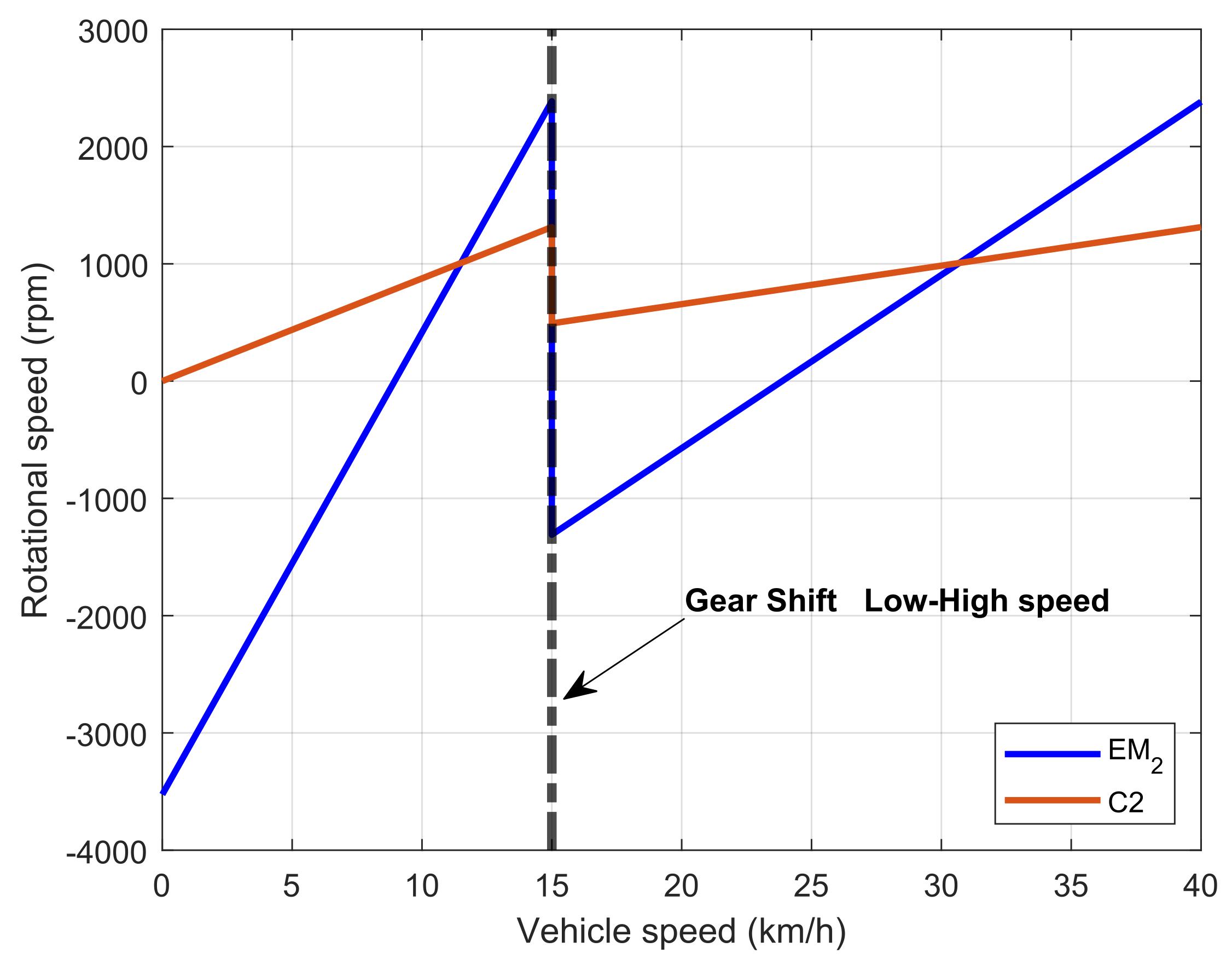
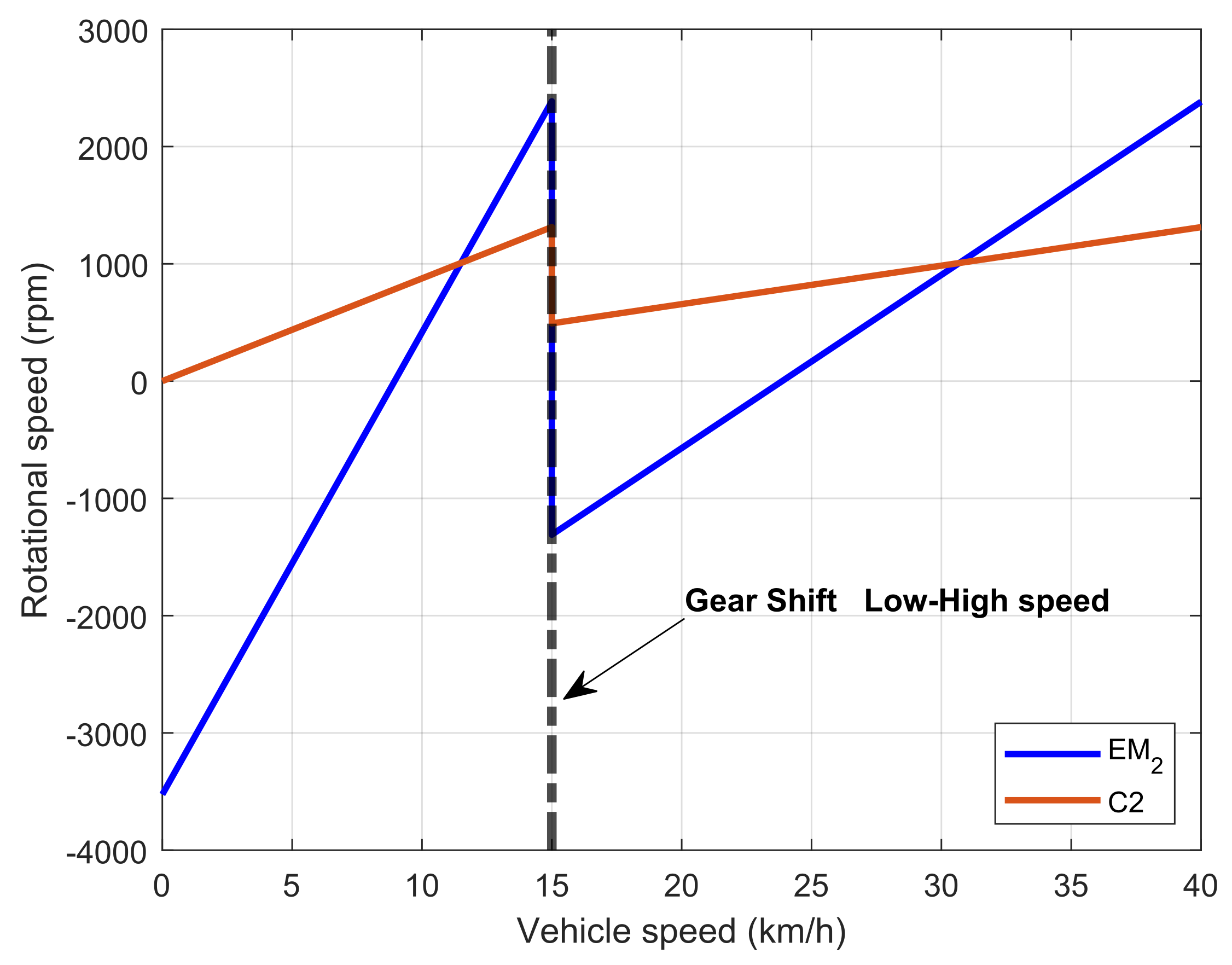
3.2.1. Kinematics
- Subscripts S, C and R refer to sun, carrier, and ring gears, respectively.
- Subscripts 1 and 2 refer to first- and second-stage planetary gear, respectively.
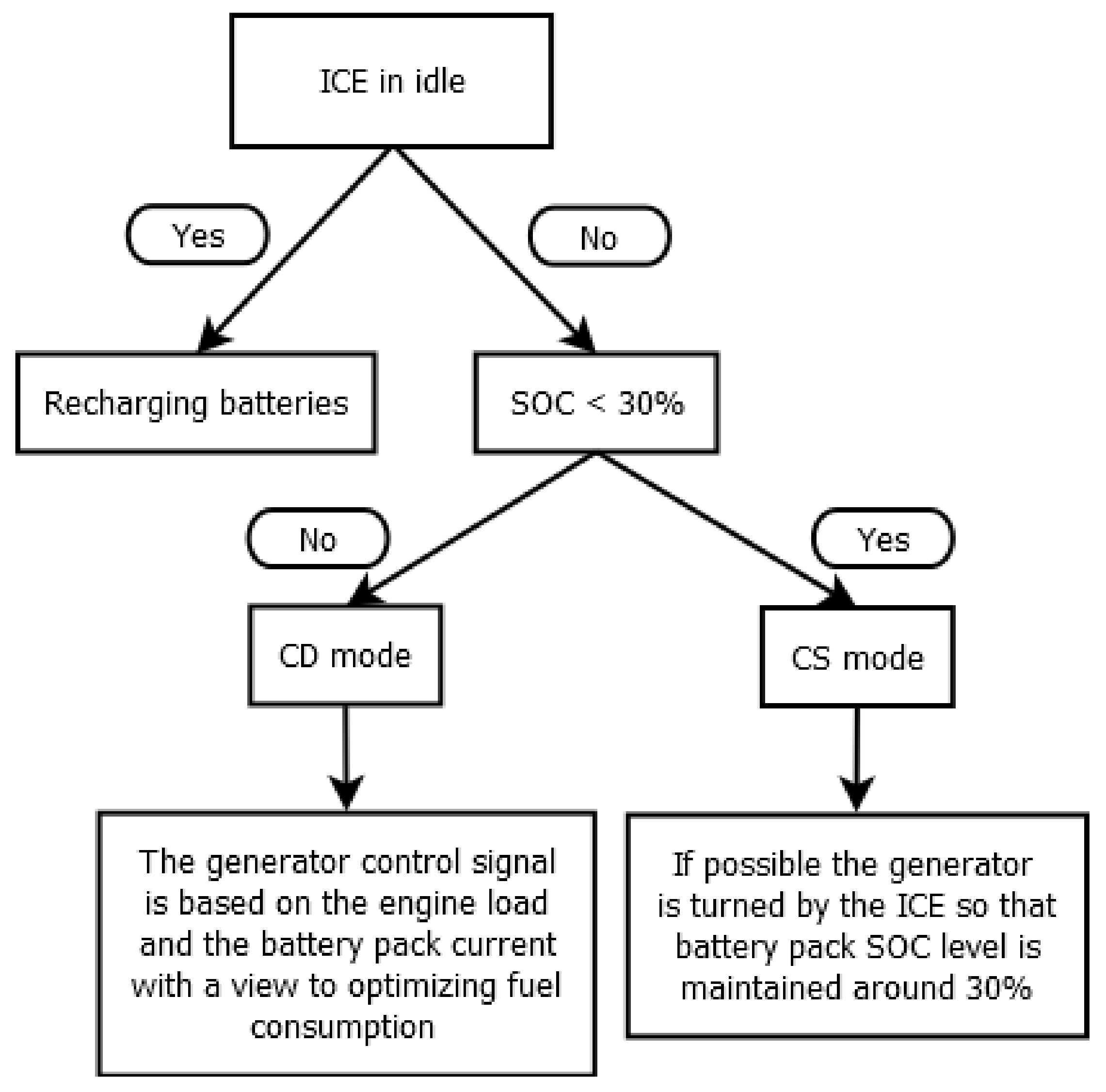
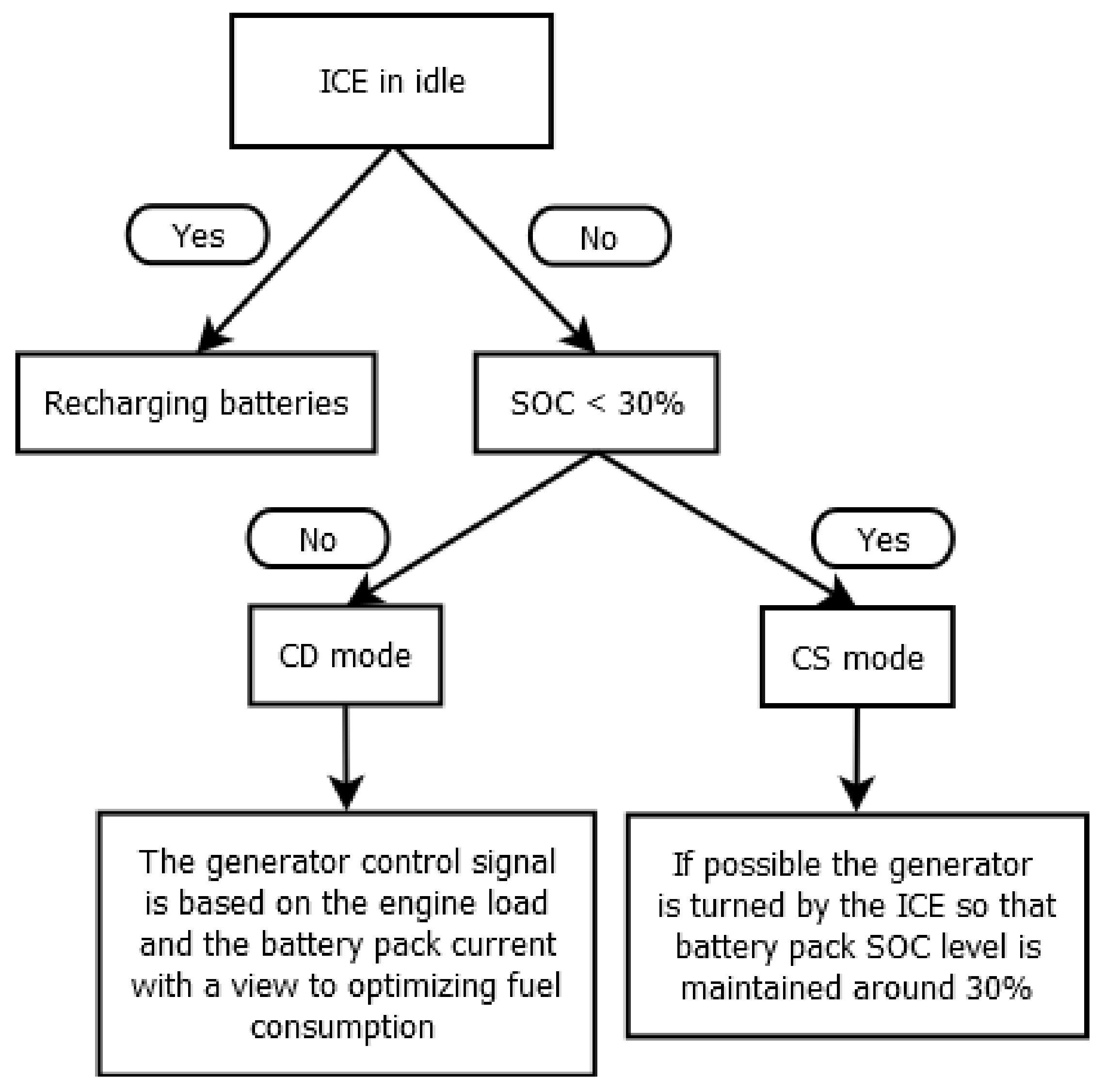
3.2.2. Energy Management
4. Numerical Investigation
- Maximum battery pack current during continuous discharging equal to 3 .
- Maximum battery pack current during instantaneous discharging equal to 5 (max 10 s).
- Maximum battery pack current during continuous charging equal to 0.5 .
- Maximum battery pack current during instantaneous charging equal to 1 .
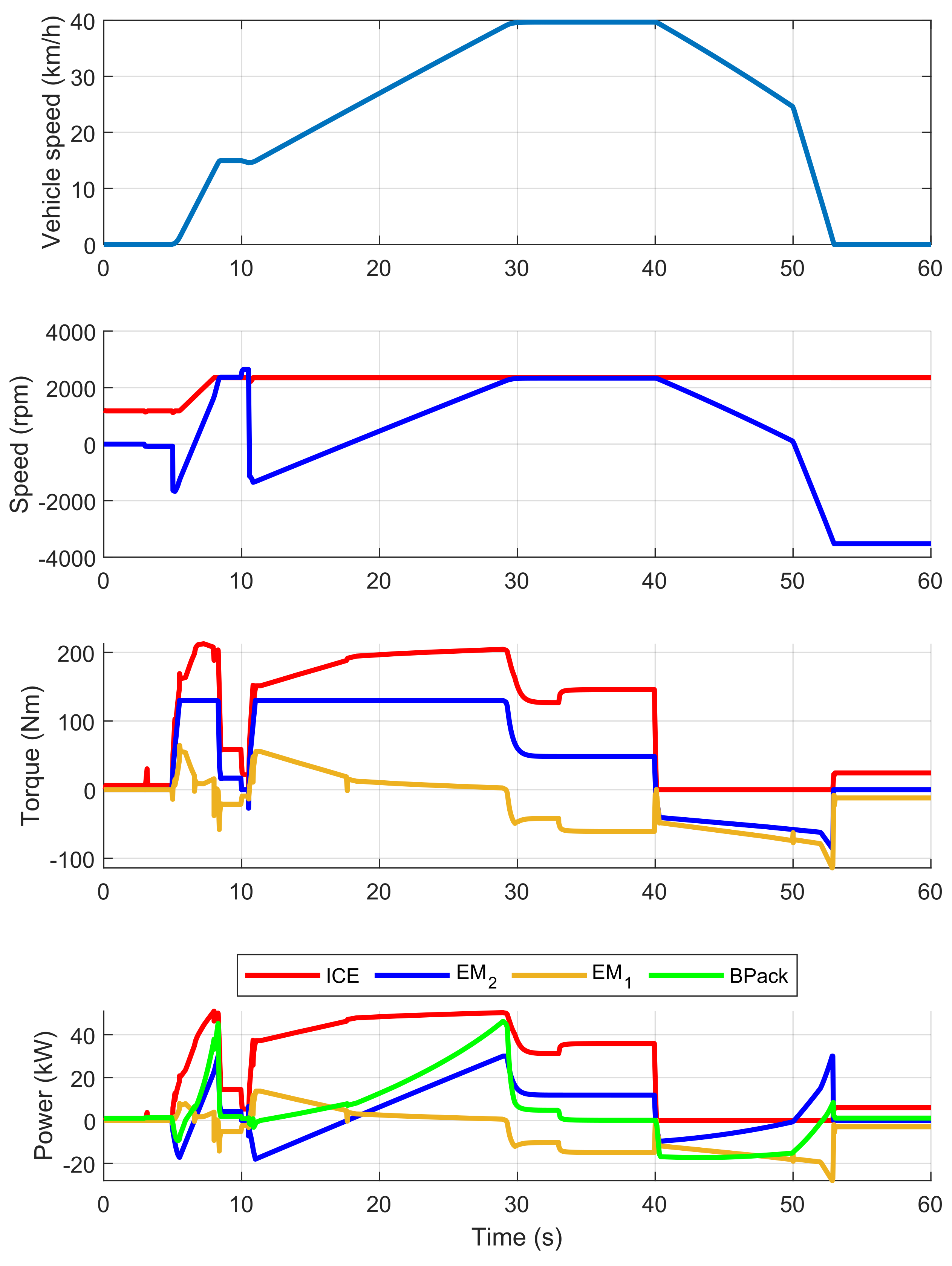
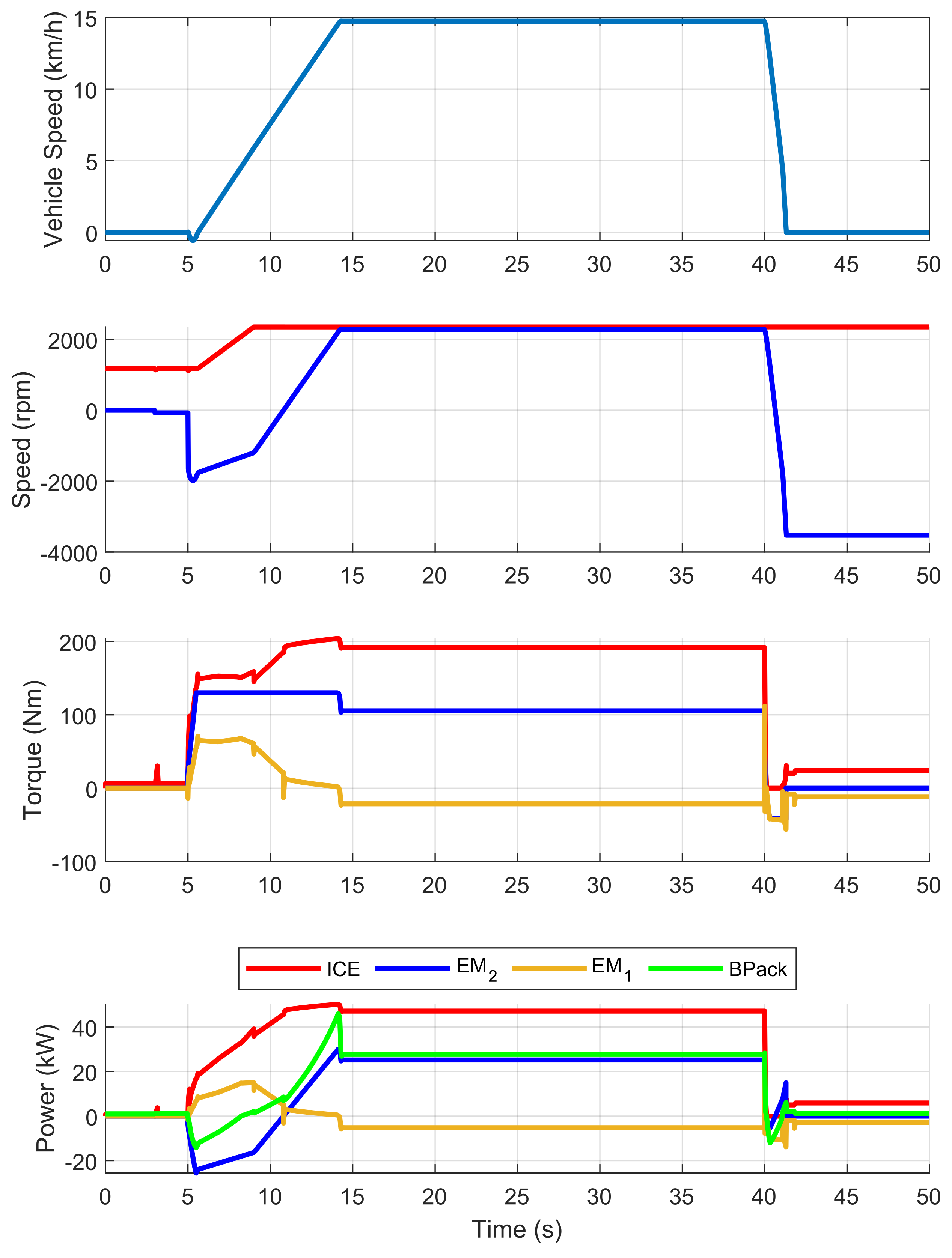
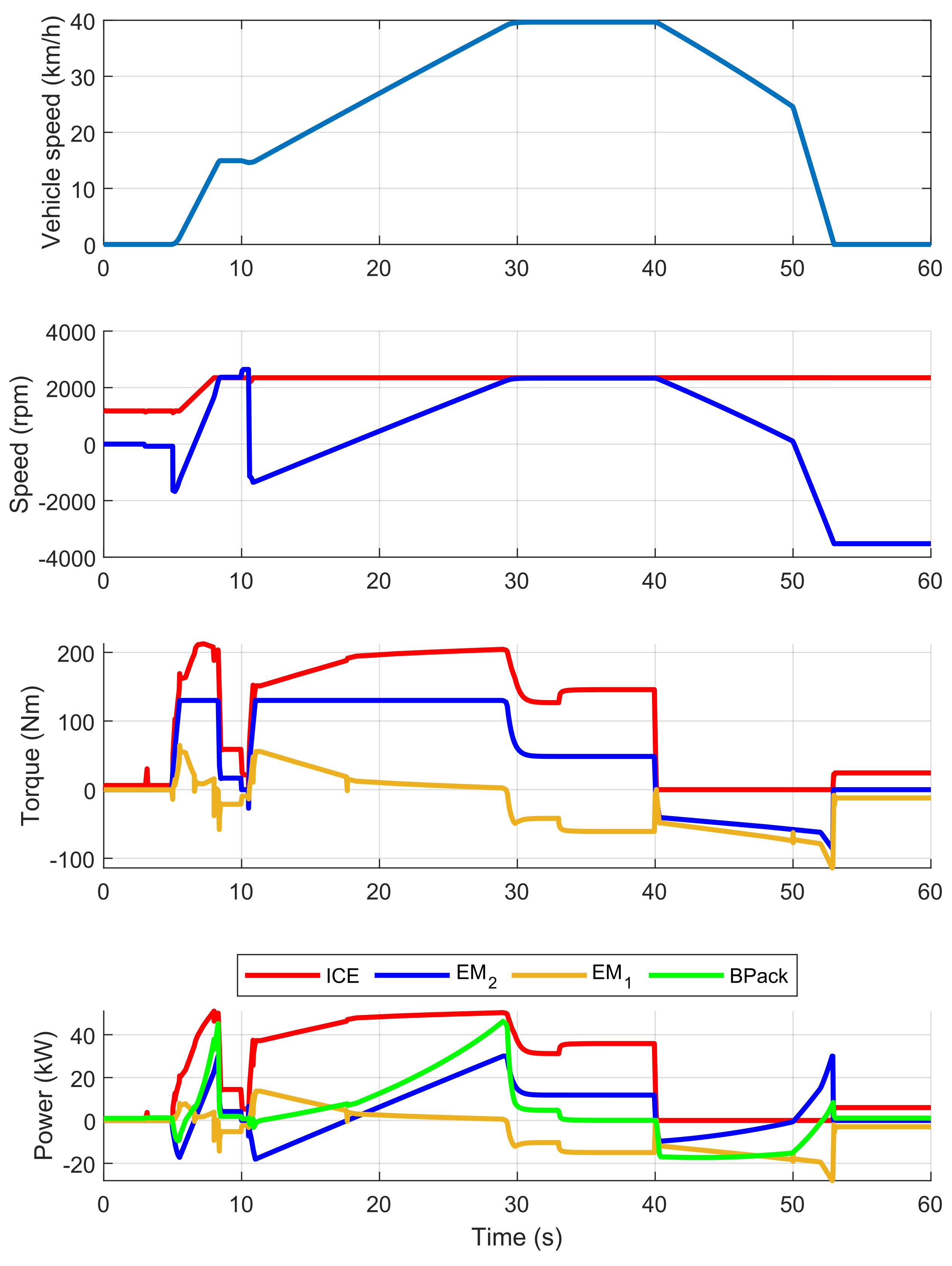
4.1. Acceleration Tests
- 0–15 km/h with no trailer, with a trailer with 6000 kg and 10,000 kg of payloads.
- 0–40 km/h with no trailer, with a trailer with 6000 kg and 10,000 kg of payloads.
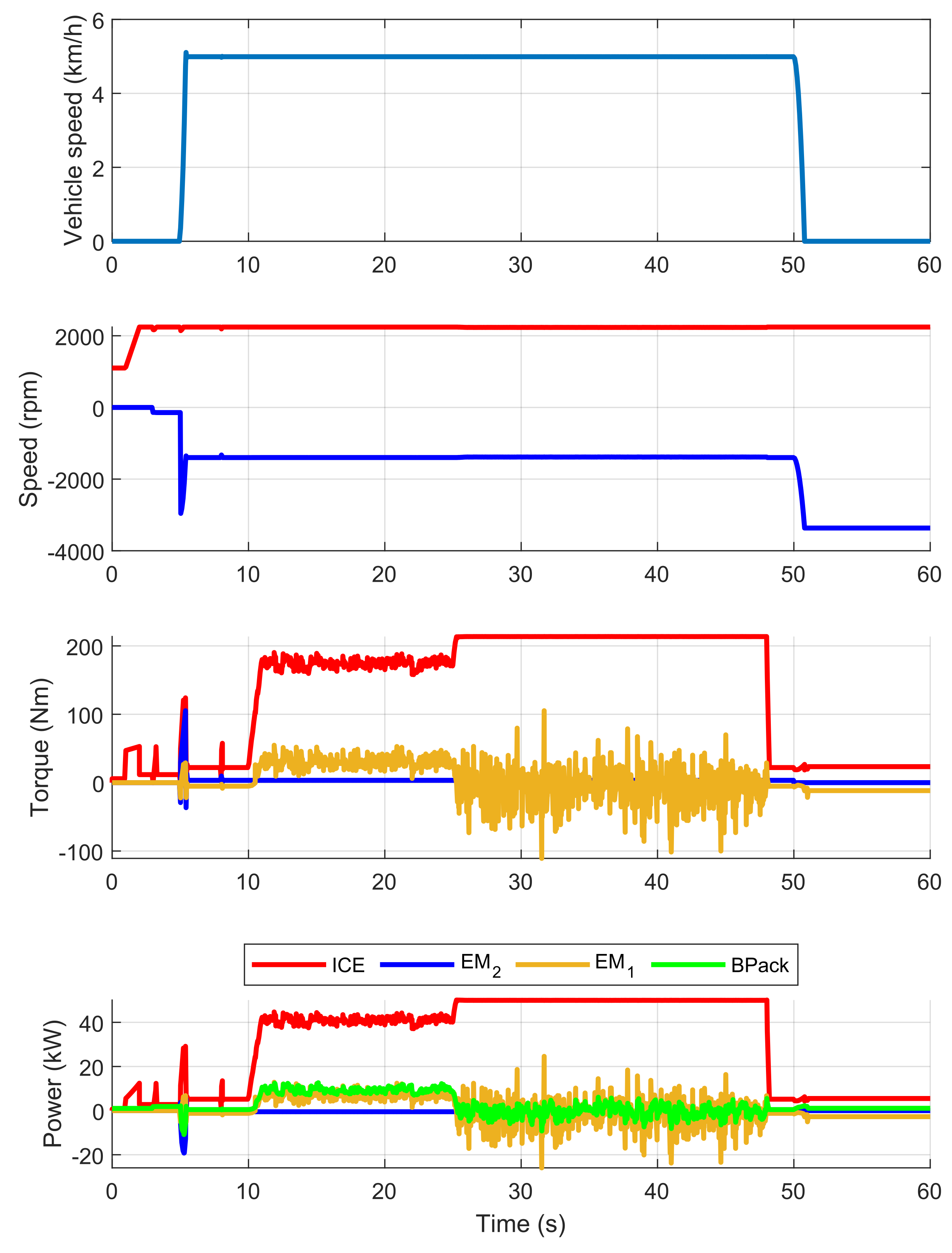
4.2. Slope Test
- Maximum approachable slope at 40 km/h with no trailer.
- Maximum approachable slope at 5 and 15 km/h with 10,000 and 5000 kg of payload, respectively.
- Maximum reachable speed with no trailer and 45% of slope.
4.3. Work Cycles—Fuel Consumption
- Fuel and energy consumptions per hour in CD mode.
- Fuel consumption per hour in CS mode.
- Fuel consumption in proposed working cycles of 8 h.
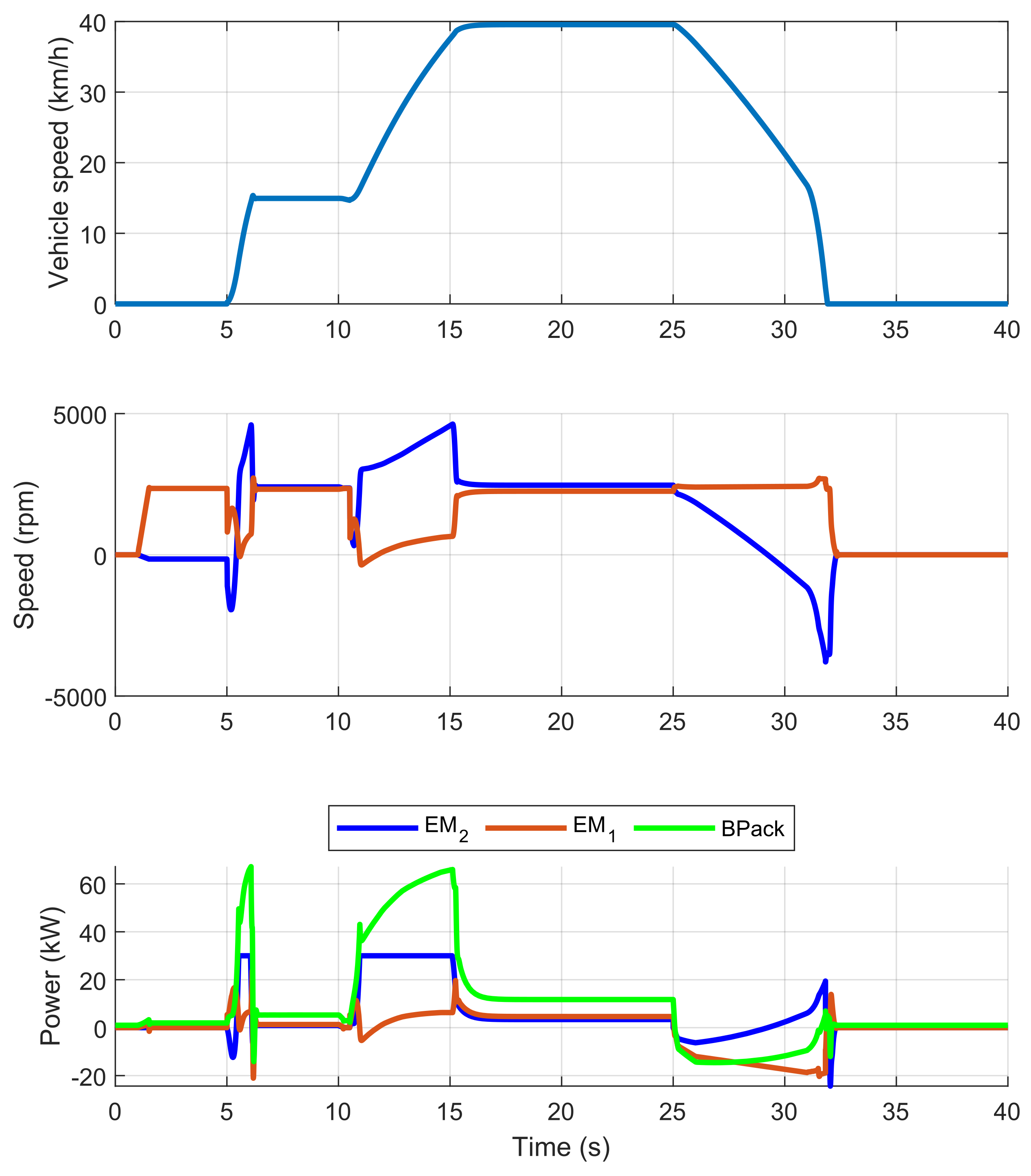
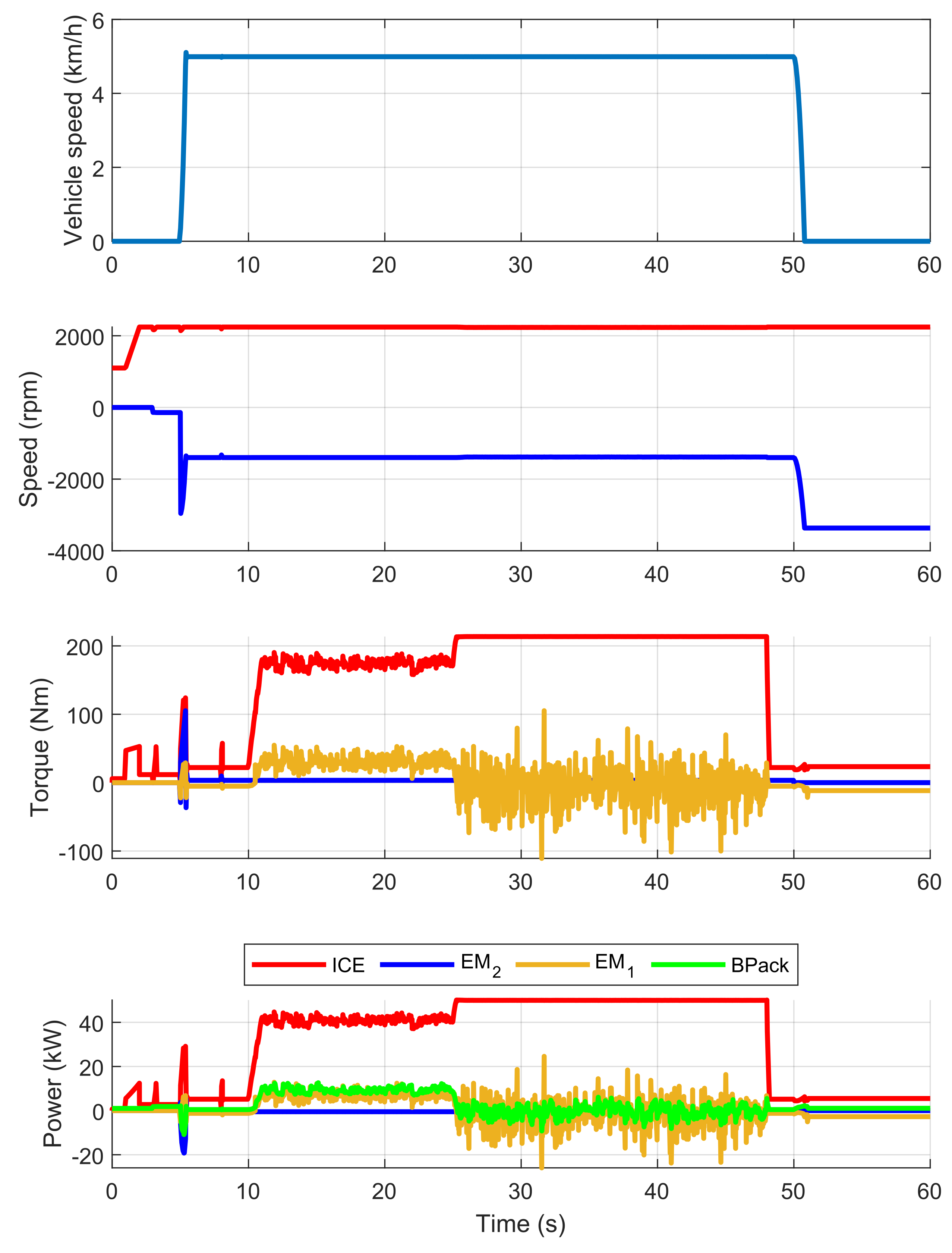
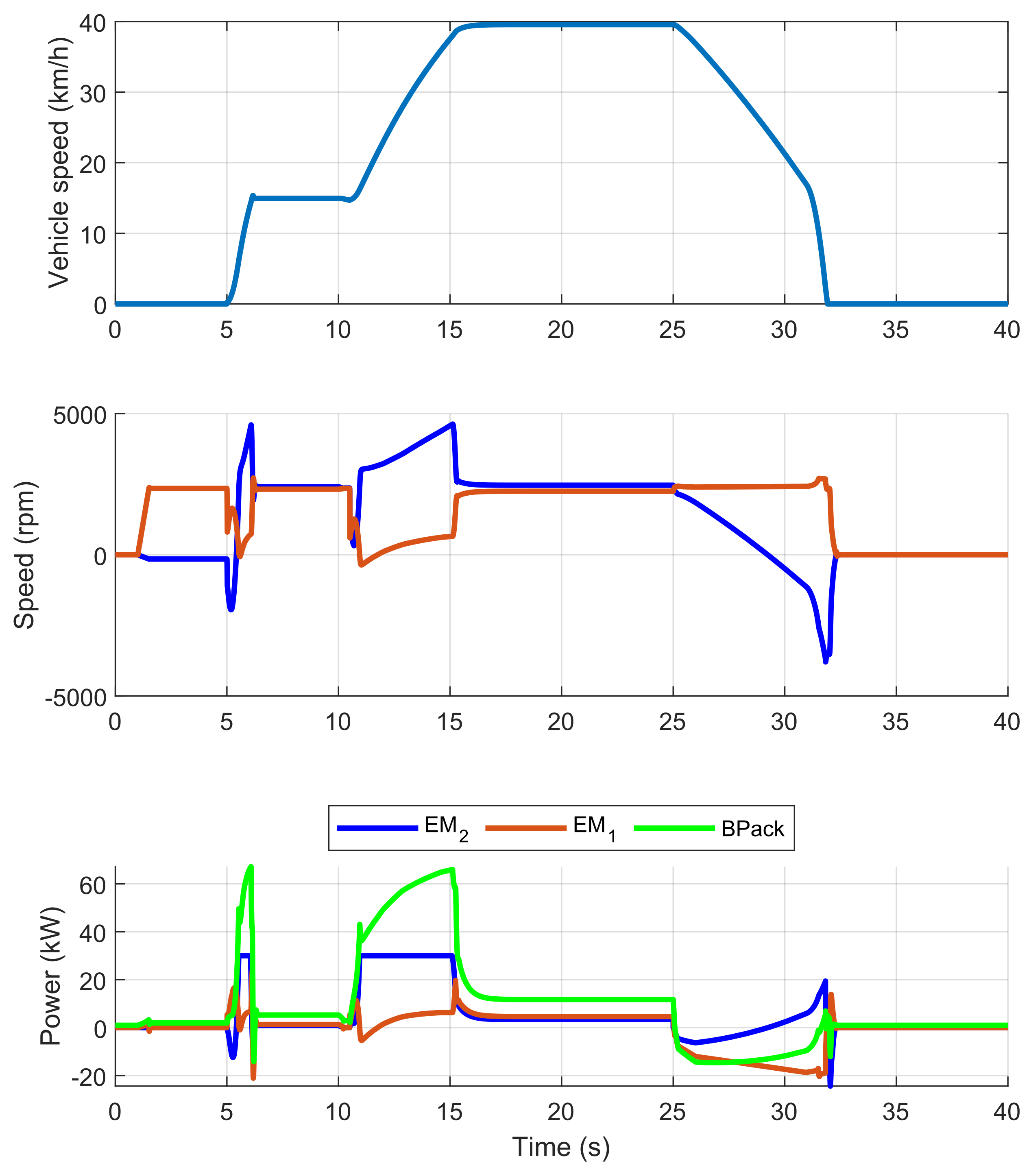
4.4. Full Electric Mode
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gorjian, S.; Ebadi, H.; Trommsdorff, M.; Sharon, H.; Demant, M.; Schindele, S. The advent of modern solar-powered electric agricultural machinery: A solution for sustainable farm operations. J. Clean. Prod. 2021, 292, 126030. [Google Scholar] [CrossRef]
- Platis, D.P.; Anagnostopoulos, C.D.; Tsaboula, A.D.; Menexes, G.C.; Kalburtji, K.L.; Mamolos, A.P. Energy Analysis, and Carbon and Water Footprint for Environmentally Friendly Farming Practices in Agroecosystems and Agroforestry. Sustainability 2019, 11, 1664. [Google Scholar] [CrossRef] [Green Version]
- Lovarelli, D.; Bacenetti, J. Exhaust gases emissions from agricultural tractors: State of the art and future perspectives for machinery operators. Biosyst. Eng. 2019, 186, 204–213. [Google Scholar] [CrossRef]
- Bacenetti, J.; Lovarelli, D.; Facchinetti, D.; Pessina, D. An environmental comparison of techniques to reduce pollutants emissions related to agricultural tractors. Biosyst. Eng. 2018, 171, 30–40. [Google Scholar] [CrossRef]
- European Parliament—Council of the European Union. Regulation (EU). 2016/1628 of the European Parliament and of the Council of 14 September 2016 on requirements relating to gaseous and particulate pollutant emission limits and type-approval for internal combustion engines for non-road mobile machinery, amending Regulations (EU) No 1024/2012 and (EU) No 167/2013, and amending and repealing Directive 97/68/EC. Off. J. Eur. Union 2016, 252, 53–117. [Google Scholar]
- Scolaro, E.; Beligoj, M.; Estevez, M.P.; Alberti, L.; Renzi, M.; Mattetti, M. Electrification of Agricultural Machinery: A Review. IEEE Access 2021, 9, 164520–164541. [Google Scholar] [CrossRef]
- Beltrami, D.; Iora, P.; Tribioli, L.; Uberti, S. Electrification of compact off-highway vehicles—Overview of the current state of the art and trends. Energies 2021, 14, 5565. [Google Scholar] [CrossRef]
- Moreda, G.; Muñoz-García, M.; Barreiro, P. High voltage electrification of tractor and agricultural machinery—A review. Energy Convers. Manag. 2016, 115, 117–131. [Google Scholar] [CrossRef]
- Somà, A. Trends and Hybridization Factor for Heavy-Duty Working Vehicles; IntechOpen: Rijeka, Croatia, 2017; Chapter 1. [Google Scholar] [CrossRef] [Green Version]
- Somà, A.; Bruzzese, F.; Mocera, F.; Viglietti, E. Hybridization Factor and Performance of Hybrid Electric Telehandler Vehicle. IEEE Trans. Ind. Appl. 2016, 52, 5130–5138. [Google Scholar] [CrossRef]
- DLG-PowerMix: Tractor Output, Efficiency and Fuel Consumption. Available online: www.dlg.org/en/agriculture/tests/dlg-powermix (accessed on 26 January 2022).
- Somà, A.; Mocera, F.; Bruzzese, F.; Viglietti, E. Simulation of dynamic performances of electric-hybrid heavy working vehicles. In Proceedings of the 2016 Eleventh International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte Carlo, Monaco, 6–8 April 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. Working Cycle requirements for an electrified architecture of a vertical feed mixer vehicle. Procedia Struct. Integr. 2018, 12, 213–223. [Google Scholar] [CrossRef]
- Lombardi, G.V.; Berni, R. Renewable energy in agriculture: Farmers willingness-to-pay for a photovoltaic electric farm tractor. J. Clean. Prod. 2021, 313, 127520. [Google Scholar] [CrossRef]
- Renius, K.T. Fundamentals of Tractor Design; Springer International Publishing: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Liu, M.; Xu, L.; Zhou, Z. Design of a Load Torque Based Control Strategy for Improving Electric Tractor Motor Energy Conversion Efficiency. Math. Probl. Eng. 2016, 2016, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Xie, B.; Li, Z.; Li, J. Design and Optimization of a Dual-Input Coupling Powertrain System: A Case Study for Electric Tractors. Appl. Sci. 2020, 10, 1608. [Google Scholar] [CrossRef] [Green Version]
- Mocera, F.; Vergori, E.; Soma, A. Battery Performance Analysis for Working Vehicle Applications. IEEE Trans. Ind. Appl. 2020, 56, 644–653. [Google Scholar] [CrossRef]
- Lagnelöv, O.; Dhillon, S.; Larsson, G.; Nilsson, D.; Larsolle, A.; Hansson, P.A. Cost analysis of autonomous battery electric field tractors in agriculture. Biosyst. Eng. 2021, 204, 358–376. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. A Review of Hybrid Electric Architectures in Construction, Handling and Agriculture Machines. In New Perspectives on Electric Vehicles; IntechOpen: London, UK, 2021. [Google Scholar] [CrossRef]
- Dalboni, M.; Santarelli, P.; Patroncini, P.; Soldati, A.; Concari, C.; Lusignani, D. Electrification of a Compact Agricultural Tractor: A Successful Case Study. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Novi, MI, USA, 19–21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mocera, F.; Somà, A. Analysis of a Parallel Hybrid Electric Tractor for Agricultural Applications. Energies 2020, 13, 3055. [Google Scholar] [CrossRef]
- Mocera, F. A Model-Based Design Approach for a Parallel Hybrid Electric Tractor Energy Management Strategy Using Hardware in the Loop Technique. Vehicles 2020, 3, 1. [Google Scholar] [CrossRef]
- Baek, S.Y.; Kim, Y.S.; Kim, W.S.; Baek, S.M.; Kim, Y.J. Development and Verification of a Simulation Model for 120 kW Class Electric AWD (All-Wheel-Drive) Tractor during Driving Operation. Energies 2020, 13, 2422. [Google Scholar] [CrossRef]
- Jia, C.; Qiao, W.; Qu, L. Numerical Methods for Optimal Control of Hybrid Electric Agricultural Tractors. In Proceedings of the 2019 IEEE Transportation Electrification Conference and Expo (ITEC), Novi, MI, USA, 19–21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Jia, C.; Qiao, W.; Qu, L. Modeling and Control of Hybrid Electric Vehicles: A Case Study for Agricultural Tractors. In Proceedings of the 2018 IEEE Vehicle Power and Propulsion Conference (VPPC), Chicago, IL, USA, 27–30 August 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Rossi, C.; Pontara, D.; Falcomer, C.; Bertoldi, M.; Mandrioli, R. A Hybrid–Electric Driveline for Agricultural Tractors Based on an e-CVT Power-Split Transmission. Energies 2021, 14, 6912. [Google Scholar] [CrossRef]
- Miller, J.M. Hybrid Electric Vehicle Propulsion System Architectures of the e-CVT Type. IEEE Trans. Power Electron. 2006, 21, 756–767. [Google Scholar] [CrossRef] [Green Version]
- Tebaldi, D.; Zanasi, R. Modeling control and simulation of a parallel hybrid agricultural tractor. In Proceedings of the 2021 29th Mediterranean Conference on Control and Automation, MED 2021, Bari, Italy, 22–25 June 2021; pp. 317–323. [Google Scholar] [CrossRef]
- Somà, A. Hybrid Transmission Unit for a Tractor and Tractor Comprising the Same. WO2021234758A1, 18 May 2020. [Google Scholar]
- Zhang, S.; Zhang, J. Optimal State-of-Charge Value for Charge-Sustaining Mode of Plug-In Hybrid Electric Vehicles. IEEE Access 2020, 8, 187959–187964. [Google Scholar] [CrossRef]
- Grisso, R.B. Predicting Tractor Diesel Fuel Consumption; Publication 442-073; Virginia Cooperative Extension: Blacksburg, VA, USA, 2014. [Google Scholar]




| Mass | 2570 kg |
| Vehicle wheelbase | 1900 mm |
| Track width | 1850 mm |
| Rolling radius | 680 mm |
| Nominal power | 73 kW @ 2400 rpm |
| Max engine rotational speed | 2400 rpm |
| Max vehicle speed | 40 km/h |
| Minimal speed | 0.4 km/h |
| Shredder | Atomizer | Rotart Harrow | |
|---|---|---|---|
| Min power (kW) | 12 | 32 | 36 |
| Mean power (kW) | 19 | 36 | 44 |
| Max power (kW) | 26 | 40 | 52 |
| Vehicle speed (km/h) | 5 | 5 | 5 |
| ICE angular speed (rpm) | 2244 | 2244 | 2244 |
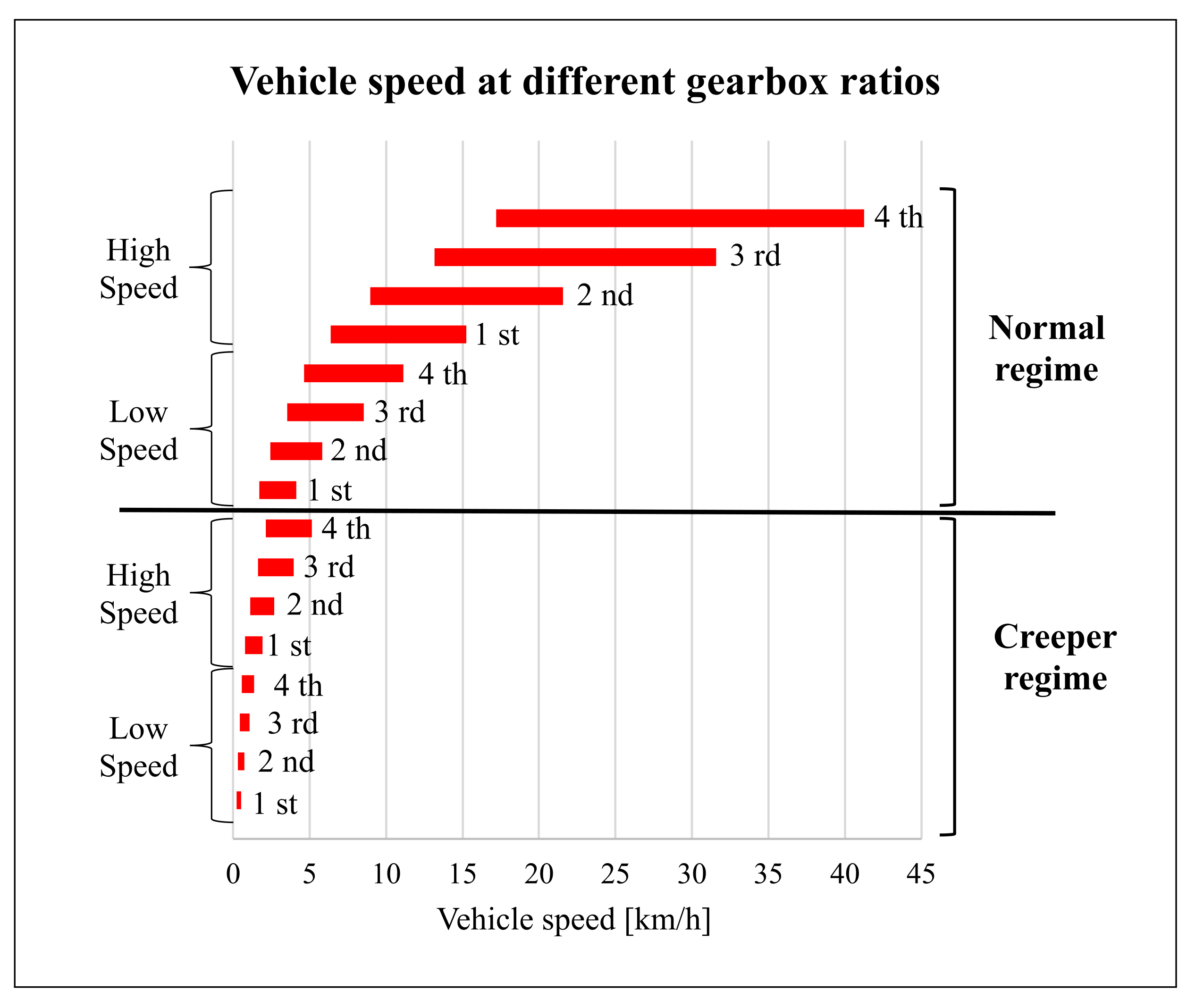
| Low speed ratio at gearbox | 22.56 |
| High speed ratio at gearbox | 8.45 |
| First-stage ring to sun teeth ratio | 2 |
| Second-stage ring to sun teeth ratio | 2 |
| HeCVT | HeCVT | Conventional | |
|---|---|---|---|
| with GS | High Speed | ||
| 0–15 km/h | |||
| No trailer | 1.2 s | 2.1 s | 2.2 s |
| 6000 kg trailer | 2.5 s | 6.7 s | 3.4 s |
| 10,000 kg trailer | 3.6 s | 11.3 s | 4.3 s |
| 0–40 km/h | |||
| No trailer | 4.8 s | 4.9 s | 5.6 s |
| 6000 kg trailer | 14.5 s | 17.8 s | 14.7 s |
| 10,000 kg trailer | 23.1 s | 30.3 s | 24.4 s |
| HeCVT | Conventional | |
|---|---|---|
| 40 km/h, no trailer | 25% | 22% |
| 5 km/h, 10,000 kg trailer | 18% * | 40% |
| 15 km/h, 5000 kg trailer | 20% | 15% |
| Max speed 45% slope, no trailer | 19.4 km/h | 20.3 km/h |
| CD Mode | CS Mode | |
|---|---|---|
| [%] | [%] | |
| Shredder | 14 | 13 |
| Atomizer | 10 | 9 |
| Rotary harrow | 10 | 8 |
| Handling at 40 km/h a 1400 kg trailer | 30 | 25 |
| Handling at 40 km/h a 6000 kg trailer | 21 | 16 |
| Handling at 40 km/h a 10,000 kg trailer | 19 | 14 |
| HeCVT | |
|---|---|
| [%] | |
| Shredder cycle | 13 |
| Atomizer cycle | 10 |
| Rotary harrow cycle | 9 |
| Handling trailer cycle | 21 |
| 0–15 km/h no trailer | 1.2 s |
| 0–40 km/h no trailer | 7 s |
| 0–15 km/h 6000 kg trailer | 3.7 s |
| 0–40 km/h 6000 kg trailer | 28.9 s |
| 0-15 km/h 10,000 kg trailer | 5.6 s |
| 0–40 km/h 10,000 kg trailer | 63.2 s |
| Max slope at 40 km/h no trailer | 36% |
| Max slope at 15 km/h no trailer | 10% |
| No trailer | 66 min |
| 6000 kg trailer | 28 min |
| 10,000 kg trailer | 19 min |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mocera, F.; Martini, V. Numerical Performance Investigation of a Hybrid eCVT Specialized Agricultural Tractor. Appl. Sci. 2022, 12, 2438. https://doi.org/10.3390/app12052438
Mocera F, Martini V. Numerical Performance Investigation of a Hybrid eCVT Specialized Agricultural Tractor. Applied Sciences. 2022; 12(5):2438. https://doi.org/10.3390/app12052438
Chicago/Turabian StyleMocera, Francesco, and Valerio Martini. 2022. "Numerical Performance Investigation of a Hybrid eCVT Specialized Agricultural Tractor" Applied Sciences 12, no. 5: 2438. https://doi.org/10.3390/app12052438
APA StyleMocera, F., & Martini, V. (2022). Numerical Performance Investigation of a Hybrid eCVT Specialized Agricultural Tractor. Applied Sciences, 12(5), 2438. https://doi.org/10.3390/app12052438