
Sliding-Mode Control of a Photovoltaic System Based on a Flyback Converter for Microinverter Applications

 ,
,  and
and
Featured Application
Abstract
1. Introduction
2. Description of the PV System
- Changes in the solar irradiance modify the current vs. voltage (I–V) and power vs. voltage (P–V) relations of the PV panel, thus changing the current (and power) delivered by the panel as it is reported in [2].
- Inverters inject ac power to the grid, but the PV panel produces dc power; thus, the voltage at the inverter input (), which is also the voltage at the first stage output, exhibits voltage oscillations at twice the grid frequency, as reported in [2].
3. Basic Concept of Sliding-Mode Control for Power Converters
3.1. Transversality Test
3.2. Reachability Test
3.3. Equivalent Control Test
4. Design of the Sliding-Mode Controller
4.1. Establishing the Switching Function
4.2. Transversality Test
4.3. Reachability Test
4.4. Equivalent Control Test
4.5. Closed-Loop Dynamics of the PV Voltage
5. Design of the PV System Dynamics
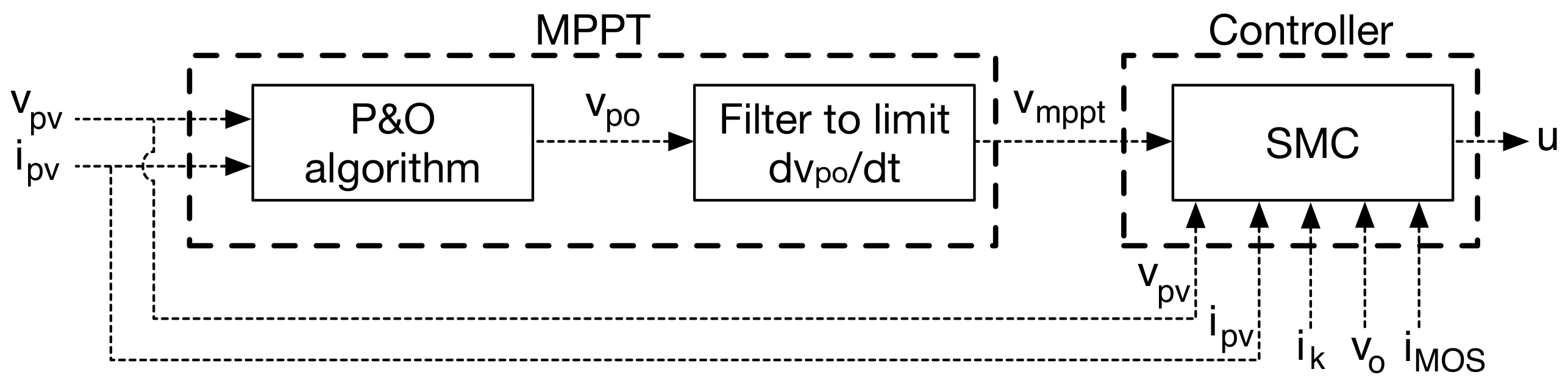
5.1. The P&O Algorithm
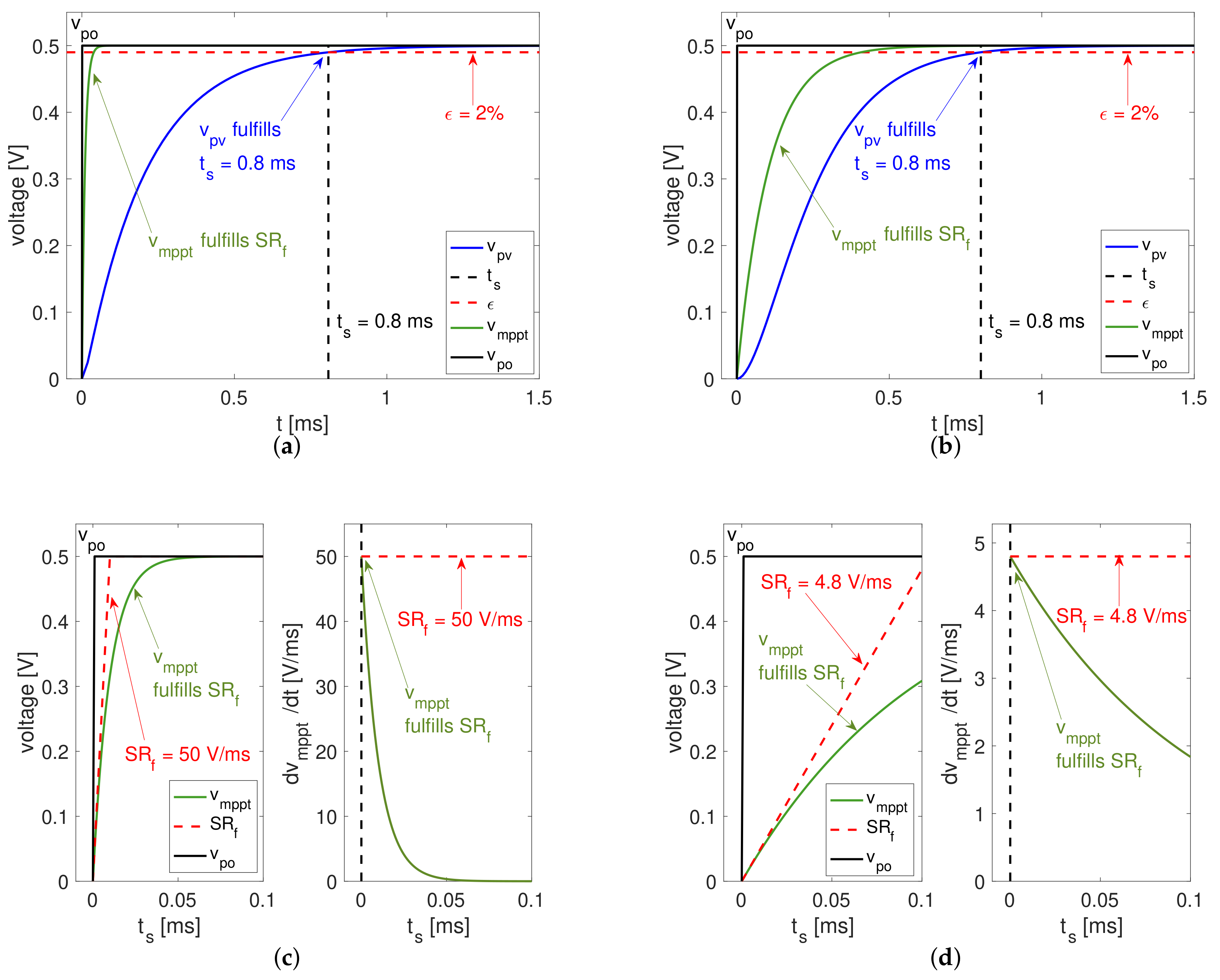
5.2. Reference Filter Design
5.3. Calculation of
6. Implementation of the SMC and the MPPT Algorithm
- Limit the switching frequency to avoid MOSFET saturation and reduce switching losses;
- Derive a practical control law for the SMC;
- Calculate both the switching function and the output signal in real-time.
6.1. Limiting the Switching Frequency
6.2. Control Law
- Condition 1: (MOSFET on, Diode off) imposes a negative switching function derivative , as given in (14); hence, the switching function is decreasing. Moreover, from Figure 1, it is observed that imposes . When reaches the lower limit , must increase to remain inside the hysteresis band. Therefore, the switching function derivative must be changed to a positive value , which requires changing according to (23).
- Condition 0: (MOSFET off, Diode on) imposes a positive , as given in (14); hence, is increasing. Moreover, from Figure 1, it is observed that imposes . When reaches the upper limit , must be reduced to remain inside the hysteresis band; thus, the switching function derivative must be changed to a negative value , which requires changing according to (25).
6.3. Summary of the Design Process
7. Design Example and Simulation Results
7.1. Numerical Analysis and Design
7.2. Circuital Simulations
- W/m: the MPP voltage is V, the MPP current is 4.63 A, and the MPP power is 85 W.
- W/m: the MPP voltage is 17.7 V, the MPP current is 2.77 A, and the MPP power is 49 W.
- W/m: the MPP voltage is 16.2 V, the MPP current is 0.92 A, and the MPP power is 15 W.
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IEA. Snapshot of Global PV Markets 2021; Technical Report; International Energy Agency: Rheine, Germany, 2021. [Google Scholar]
- Petrone, G.; Ramos-Paja, C.A.; Spagnuolo, G. Photovoltaic Sources Modeling; John Wiley & Sons Ltd.: Chichester, UK, 2017. [Google Scholar] [CrossRef]
- Mehedi, I.M.; Salam, Z.; Ramli, M.Z.; Chin, V.J.; Bassi, H.; Rawa, M.J.; Abdullah, M.P. Critical evaluation and review of partial shading mitigation methods for grid-connected PV system using hardware solutions: The module-level and array-level approaches. Renew. Sustain. Energy Rev. 2021, 146, 111138. [Google Scholar] [CrossRef]
- Çelik, Ö.; Teke, A.; Tan, A. Overview of micro-inverters as a challenging technology in photovoltaic applications. Renew. Sustain. Energy Rev. 2018, 82, 3191–3206. [Google Scholar] [CrossRef]
- Enphase. 2021. Comparing Inverters: Make the Smartest Choice in Solar. Available online: https://www4.enphase.com/en-au/products-and-services/microinverters/vs-string-inverter (accessed on 26 November 2021).
- Microchip. Grid-Connected Solar Microinverter Reference Design Using a dsPIC® Digital Signal Controller-AN1338; Technical Report; Microchip: Chandler, AZ, USA, 2011. [Google Scholar]
- Manoharan, M.S.; Ahmed, A.; Seo, J.W.; Park, J.H. Power conditioning for a small-scale PV system with charge-balancing integrated micro-inverter. J. Power Electron. 2015, 15, 1318–1328. [Google Scholar] [CrossRef]
- Ahmed, M.E.S.; Orabi, M.; AbdelRahim, O.M. Two-stage micro-grid inverter with high-voltage gain for photovoltaic applications. IET Power Electron. 2013, 6, 1812–1821. [Google Scholar] [CrossRef]
- Trujillo, C.L.; Santamaría, F.; Gaona, E.E. Modeling and testing of two-stage grid-connected photovoltaic micro-inverters. Renew. Energy 2016, 99, 533–542. [Google Scholar] [CrossRef]
- Evran, F. Plug-in repetitive control of single-phase grid-connected inverter for AC module applications. IET Power Electron. 2017, 10, 47–58. [Google Scholar] [CrossRef]
- BP Solar. 2003. Datasheet BP 585. Available online: https://atlantasolar.com/pdf/BPSolar/BP585U.pdf (accessed on 26 November 2021).
- Trina Solar. Residential Module: Multi-Busbar Mono PERC Module. 2020. Available online: https://static.trinasolar.com/sites/default/files/Datasheet_DE06\X.05%28II%29_NA_2021_A.pdf (accessed on 26 November 2021).
- Garcerá, G.; González-Medina, R.; Figueres, E.; Sandia, J. Dynamic modeling of DC—DC converters with peak current control in double-stage photovoltaic grid-connected inverters. Int. J. Circuit Theory Appl. 2012, 40, 793–813. [Google Scholar] [CrossRef]
- Bagheri, F.; Guler, N.; Komurcugil, H. Sliding Mode Current Observer for a Bidirectional Dual Active Bridge Converter. In Proceedings of the IECON 2021—47th Annual Conference of the IEEE Industrial Electronics Society, Toronto, ON, Canada, 13–16 October 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Jayalaksmi, N.S.; Gaonkar, D.N.; Naik, A. Design and analysis of dual output flyback converter for standalone PV/battery system. Int. J. Renew. Energy Res. 2017, 7, 1032–1040. [Google Scholar]
- Feng, J.; Wang, H.; Xu, J.; Su, M.; Gui, W.; Li, X. A Three-Phase Grid-Connected Microinverter for AC Photovoltaic Module Applications. IEEE Trans. Power Electron. 2018, 33, 7721–7732. [Google Scholar] [CrossRef]
- Raj, P.J.; Prabhu, V.V.; Premkumar, K. Fuzzy Logic-based Battery Management System for Solar-Powered Li-Ion Battery in Electric Vehicle Applications. J. Circuits Syst. Comput. 2021, 30, 2150043. [Google Scholar] [CrossRef]
- Dhiman, S.; Nijhawan, P. An improved PV system with auto-protection to inject active power into the power grid of marine ships. Indian J. Geo-Mar. Sci. 2020, 49, 1132–1142. [Google Scholar]
- Lopes Filho, G.; Franco, R.A.P.; Vieira, F.H.T. Maximum Power Point Tracking for Photovoltaic Panels Using Model Predictive Control and Incremental Conductance. Electr. Power Components Syst. 2021, 49, 345–360. [Google Scholar] [CrossRef]
- Dhiman, S.; Nijhawan, P. Design & analysis of improved bus-tied photovoltaic system for marine ships. Indian J. Geo-Mar. Sci. 2019, 48, 1963–1970. [Google Scholar]
- Loukriz, A.; Haddadi, M.; Messalti, S. Simulation and experimental design of a new advanced variable step size Incremental Conductance MPPT algorithm for PV systems. ISA Trans. 2016, 62, 30–38. [Google Scholar] [CrossRef]
- Messalti, S.; Harrag, A.; Loukriz, A. A new variable step size neural networks MPPT controller: Review, simulation and hardware implementation. Renew. Sustain. Energy Rev. 2017, 68, 221–233. [Google Scholar] [CrossRef]
- Komurcugil, H.; Biricik, S.; Bayhan, S.; Zhang, Z. Sliding Mode Control: Overview of Its Applications in Power Converters. IEEE Ind. Electron. Mag. 2021, 15, 40–49. [Google Scholar] [CrossRef]
- Babes, B.; Mekhilef, S.; Boutaghane, A.; Rahmani, L. Fuzzy Approximation-Based Fractional-Order Nonsingular Terminal Sliding Mode Controller for DC-DC Buck Converters. IEEE Trans. Power Electron. 2022, 37, 2749–2760. [Google Scholar] [CrossRef]
- Liu, J.; Laghrouche, S.; Harmouche, M.; Wack, M. Adaptive-gain second-order sliding mode observer design for switching power converters. Control. Eng. Pract. 2014, 30, 124–131. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. Optimization of Perturb and Observe Maximum Power Point Tracking Method. IEEE Trans. Power Electron. 2005, 20, 963–973. [Google Scholar] [CrossRef]
- Femia, N.; Petrone, G.; Spagnuolo, G.; Vitelli, M. A technique for improving P&O MPPT performances of double-stage grid-connected photovoltaic systems. IEEE Trans. Ind. Electron. 2009, 56, 4473–4482. [Google Scholar] [CrossRef]
- Corless, R.M.; Gonnet, G.H.; Hare, D.E.G.; Jeffrey, D.J.; Knuth, D.E. On the LambertW function. Adv. Comput. Math. 1996, 5, 329–359. [Google Scholar] [CrossRef]
- Tan, S.C.; Lai, Y.M.; Tse, C.K. Sliding Mode Control of Switching Power Converters; CRC Press: Boca Raton, FL, USA, 2011; p. 368. [Google Scholar] [CrossRef]
- González Montoya, D.; Ramos-Paja, C.A.; Giral, R. Improved Design of Sliding-Mode Controllers Based on the Requirements of MPPT Techniques. IEEE Trans. Power Electron. 2016, 31, 235–247. [Google Scholar] [CrossRef]
- NASCENTechnology. LTCC High Voltage Flyback Transformer 95073, 95073-STX; NASCENTechnology Inc.: Watertown, SD, USA, 2013. [Google Scholar]
- PSIM. PSIM: The Ultimate Simulation Environment for Power Conversion and Motor Control; PSIM: Rockville, MD, USA, 2021; Available online: https://powersimtech.com/products/psim/capabilities-applications/ (accessed on 26 November 2021).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| PV Panel | |
|---|---|
| MPP voltage () | 18.5 V |
| MPP power () | 85.5 W |
| Short-circuit current () | 5.0 A |
| Open-circuit voltage () | 22.1 V |
| Flyback Converter | |
| Input capacitor () | F |
| Magnetizing inductor () | H |
| Leakage inductor () | H |
| Turn-ratio (n) | |
| Average output voltage () | 220 V |
| P&O Algorithm | |
| Perturbation amplitude () | 0.5 V |
| Perturbation period () | 1 ms |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramos-Paja, C.A.; Bastidas-Rodriguez, J.D.; Saavedra-Montes, A.J. Sliding-Mode Control of a Photovoltaic System Based on a Flyback Converter for Microinverter Applications. Appl. Sci. 2022, 12, 1399. https://doi.org/10.3390/app12031399
Ramos-Paja CA, Bastidas-Rodriguez JD, Saavedra-Montes AJ. Sliding-Mode Control of a Photovoltaic System Based on a Flyback Converter for Microinverter Applications. Applied Sciences. 2022; 12(3):1399. https://doi.org/10.3390/app12031399
Chicago/Turabian StyleRamos-Paja, Carlos Andres, Juan David Bastidas-Rodriguez, and Andres Julian Saavedra-Montes. 2022. "Sliding-Mode Control of a Photovoltaic System Based on a Flyback Converter for Microinverter Applications" Applied Sciences 12, no. 3: 1399. https://doi.org/10.3390/app12031399
APA StyleRamos-Paja, C. A., Bastidas-Rodriguez, J. D., & Saavedra-Montes, A. J. (2022). Sliding-Mode Control of a Photovoltaic System Based on a Flyback Converter for Microinverter Applications. Applied Sciences, 12(3), 1399. https://doi.org/10.3390/app12031399