
SMC-CPHD Filter with Adaptive Survival Probability for Multiple Frequency Tracking



Abstract
1. Introduction
2. Processing Steps of the SMC-CPHD Filter
| Algorithm 1: SMC-CPHD filter |
| Inputs: cardinality distribution: |
| intensity function (case , Equation (1) |
| intensity function (case , Equation (2) |
| measurement set: |
| predicted cardinality distribution: , Equation (3) |
| input particle sets: , Equation (5) |
| predicted intensity function (case , Equation (6) |
| fordo |
| , Equation (7) |
| , Equation (8) |
| end for |
| number of newborn target particles: |
| predicted intensity function (case , Equation (9) |
| fordo |
| for do |
| , Equation (10) |
| , Equation (11) |
| end for |
| end for |
| updated cardinality distribution: , Equation (12) |
| fordo |
| , Equation (14) |
| , Equations (14) and (15) |
| end for |
| updated intensity function: , Equations (16) and (18) |
| updated weights (case , Equation (17) |
| updated weights (case , Equation (19) |
| estimated number of persistent and newborn targets: |
| number of particles for resampling: |
| Outputs: updated cardinality distribution: |
| updated intensity function: , Equation (21) |
3. SMC-CPHD Filter with Adaptive Survival Probability
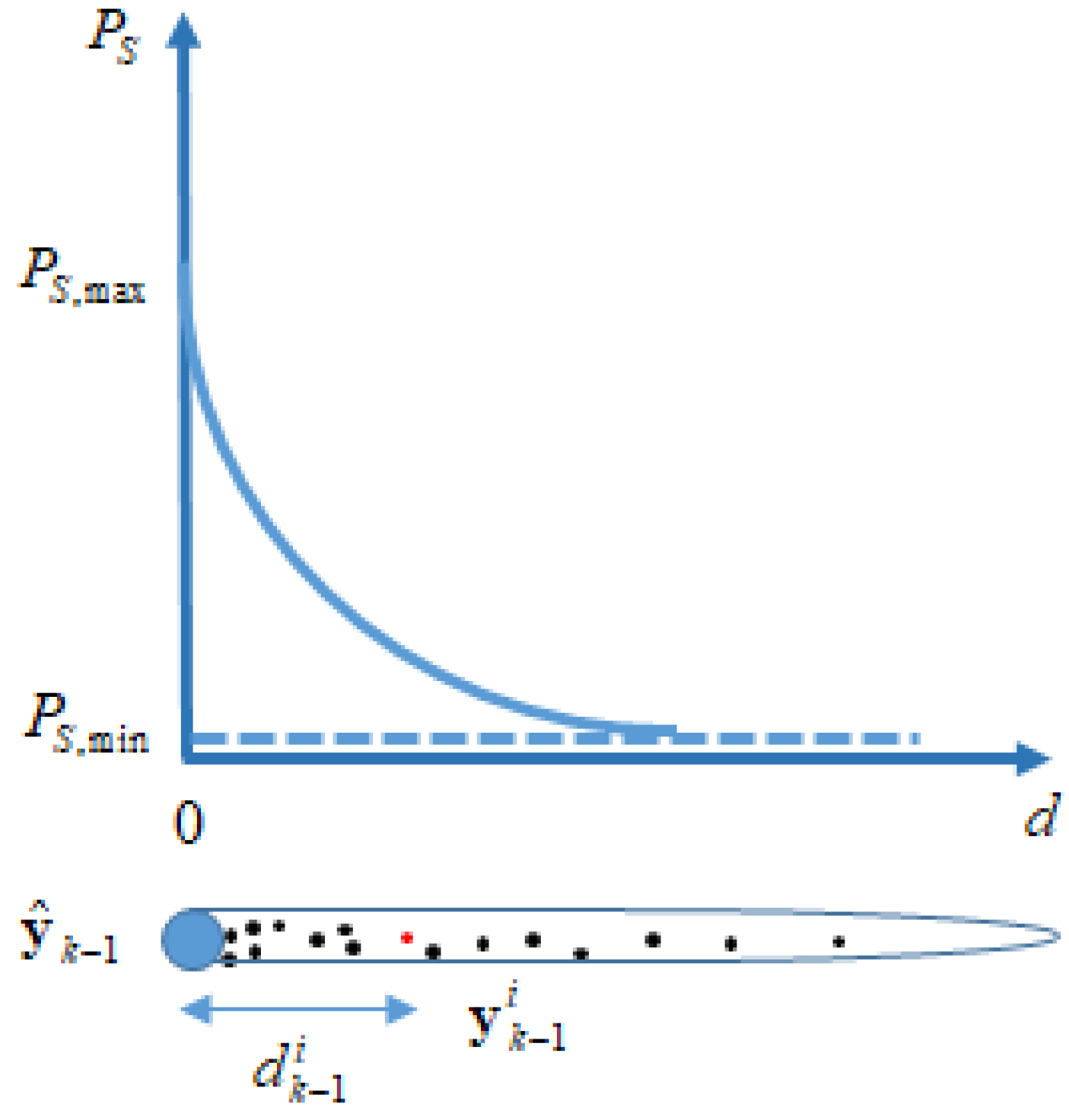
3.1. New Adaptive Survival Probability
3.2. Convergence Analysis
4. Cardinality Compensation with ICI
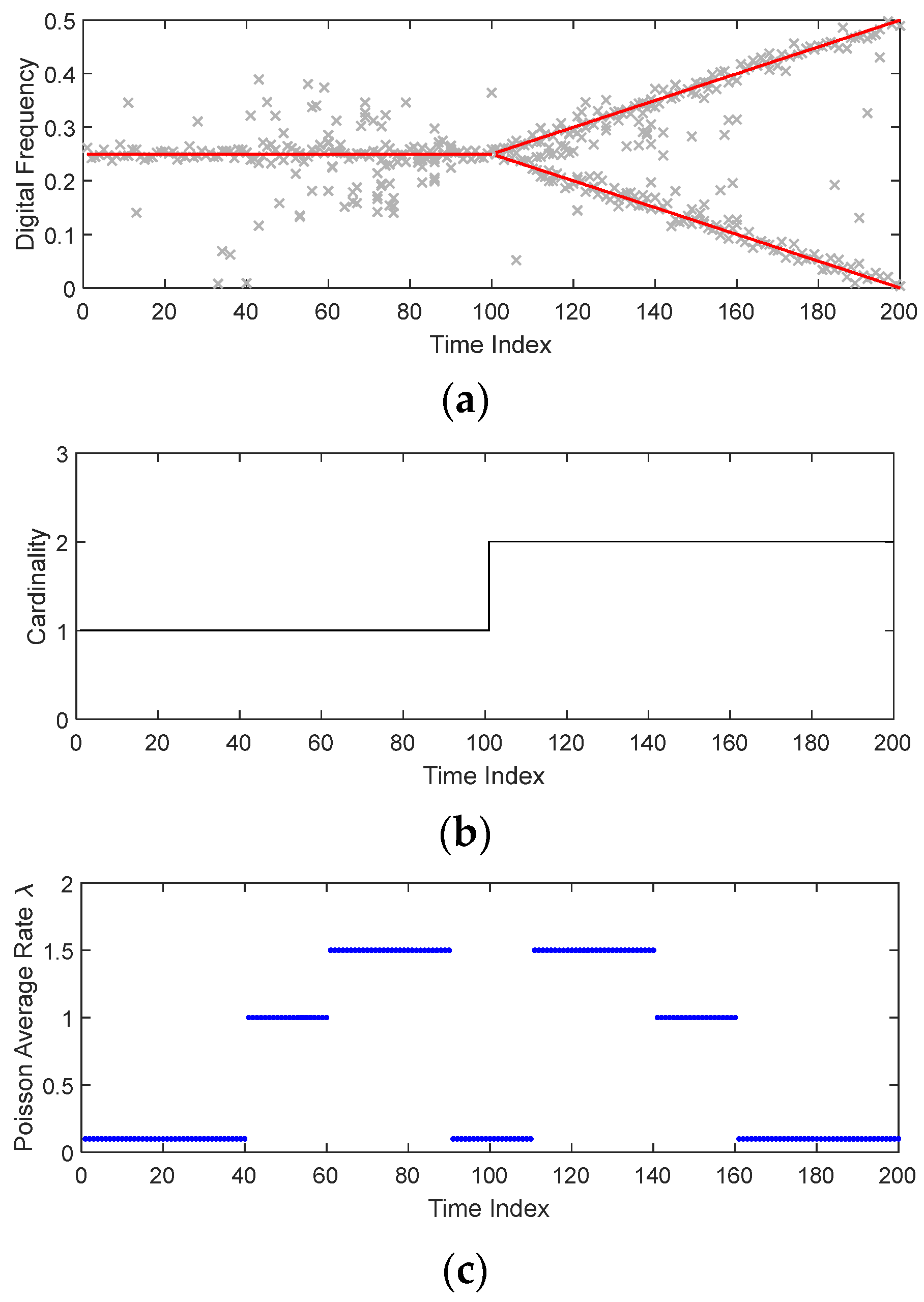
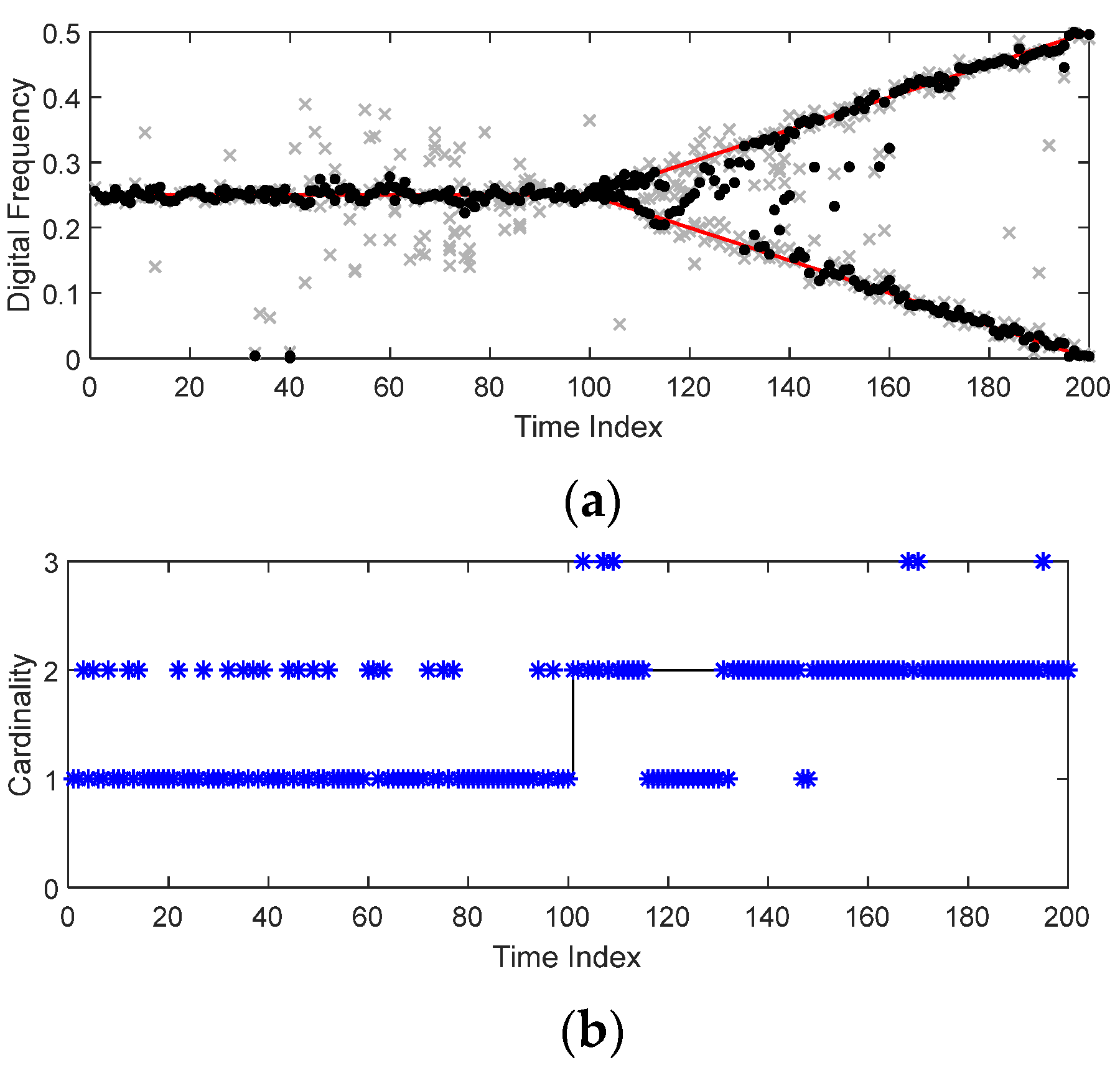
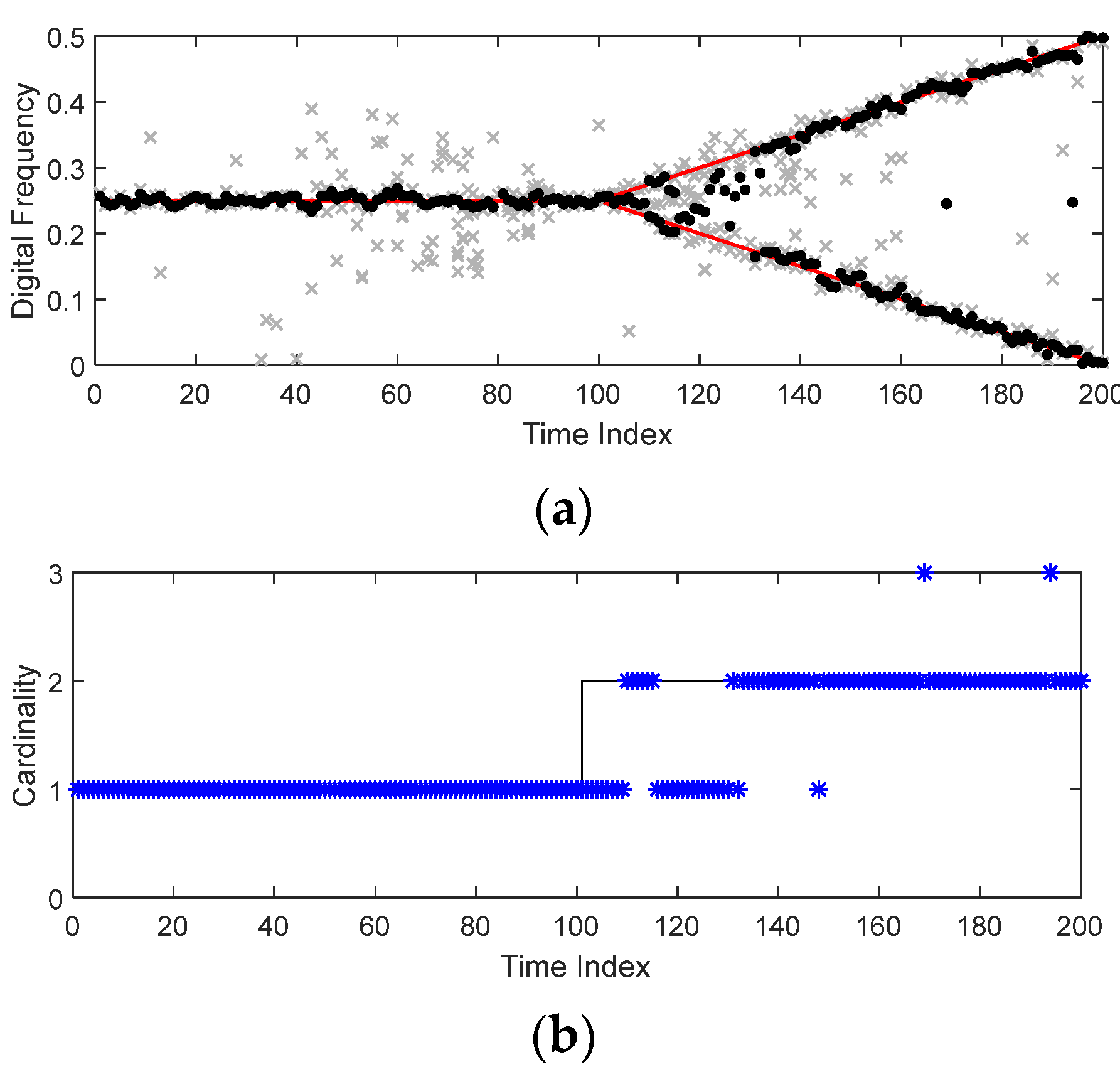
5. Simulations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Fortmann, T.; Bar-Shalom, Y.; Scheffe, M. Sonar tracking of multiple targets using joint probabilistic data association. IEEE J. Ocean. Eng. 1983, 8, 173–184. [Google Scholar]
- Bar-Shalom, Y.; Fortmann, T. Tracking and Data Association; Academic Press: Boston, MA, USA, 1988. [Google Scholar]
- Blackman, S.; Popoli, R. Design and Analysis of Modern Tracking Systems; Artech House: Boston, MA, USA, 1999. [Google Scholar]
- Mahler, R.P. Multitarget Bayes filtering via first-order multitarget moments. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 1152–1178. [Google Scholar] [CrossRef]
- Blackman, S.S. Multiple hypothesis tracking for multiple target tracking. IEEE Aerosp. Electron. Syst. Mag. 2004, 19, 5–18. [Google Scholar]
- Vo, B.N.; Singh, S.; Doucet, A. Sequential Monte Carlo methods for multitarget filtering with random finite sets. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1224–1245. [Google Scholar]
- Vo, B.N.; Ma, W.K. The Gaussian mixture probability hypothesis density filter. IEEE Trans. Signal Process. 2006, 54, 4091–4104. [Google Scholar] [CrossRef]
- Mahler, R.P. Statistical Multisource-Multitarget Information Fusion; Artech House: Boston, MA, USA, 2007. [Google Scholar]
- Mahler, R. PHD filters of higher order in target number. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1523–1543. [Google Scholar] [CrossRef]
- Vo, B.T.; Vo, B.N.; Cantoni, A. Analytic implementations of the cardinalized probability hypothesis density filter. IEEE Trans. Signal Process. 2007, 55, 3553–3567. [Google Scholar]
- Fu, Z.; Feng, P.; Angelini, F.; Chambers, J.; Naqvi, S.M. Particle PHD filter based multiple human tracking using online group-structured dictionary learning. IEEE Access 2018, 6, 14764–14778. [Google Scholar] [CrossRef]
- Hosseini, S.S.; Jamali, M.M.; Särkkä, S. Variational Bayesian adaptation of noise covariances in multiple target tracking problems. Measurement 2018, 122, 14–19. [Google Scholar]
- Bao, Z.; Jiang, Q.; Liu, F. A PHD Based Particle Filter for Detecting and Tracking Multiple Weak Targets. IEEE Access 2019, 7, 145843–145850. [Google Scholar] [CrossRef]
- Clark, D.; Ruiz, I.T.; Petillot, Y.; Bell, J. Particle PHD filter multiple target tracking in sonar image. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 409–416. [Google Scholar] [CrossRef]
- Pham, N.T.; Huang, W.; Ong, S.H. Tracking multiple objects using probability hypothesis density filter and color measurements. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007; pp. 1511–1514. [Google Scholar]
- Maggio, E.; Taj, M.; Cavallaro, A. Efficient multitarget visual tracking using random finite sets. IEEE Trans. Circuits Syst. Video Technol. 2008, 18, 1016–1027. [Google Scholar] [CrossRef]
- Battistelli, G.; Chisci, L.; Morrocchi, S.; Papi, F.; Benavoli, A.; Farina, A.; Graziano, A. Traffic intensity estimation via PHD filtering. In Proceedings of the 2008 European Radar Conference, Amsterdam, The Netherlands, 30–31 October 2008; pp. 340–343. [Google Scholar]
- Juang, R.R.; Levchenko, A.; Burlina, P. Tracking cell motion using GM-PHD. In Proceedings of the 2009 IEEE International Symposium on Biomedical Imaging: From Nano to Macro, Boston, MA, USA, 28 June–1 July 2009; pp. 1154–1157. [Google Scholar]
- Pollard, E.; Plyer, A.; Pannetier, B.; Champagnat, F.; Le Besnerais, G. GM-PHD filters for multi-object tracking in uncalibrated aerial videos. In Proceedings of the 12th International Conference on Information Fusion, Seattle, WA, USA, 6–9 July 2009; pp. 1171–1178. [Google Scholar]
- Ulmke, M.; Erdinc, O.; Willett, P. GMTI tracking via the Gaussian mixture cardinalized probability hypothesis density filter. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1821–1833. [Google Scholar] [CrossRef]
- Mullane, J.; Vo, B.N.; Adams, M.D.; Vo, B.T. A random-finite-set approach to Bayesian SLAM. IEEE Trans. Robot. 2011, 27, 268–282. [Google Scholar] [CrossRef]
- Kim, S.Y. Multiple frequency tracking method based on the cardinalised probability hypothesis density filter with cardinality compensation. In Proceedings of the 31st International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS+ 2018), Miami, FL, USA, 24–28 September 2018; pp. 3504–3517. [Google Scholar]
- Ristic, B.; Clark, D.; Vo, B.N.; Vo, B.T. Adaptive target birth intensity for PHD and CPHD filters. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 1656–1668. [Google Scholar] [CrossRef]
- Yazdian-Dehkordi, M.; Azimifar, Z. Refined GM-PHD tracker for tracking targets in possible subsequent missed detections. Signal Process. 2015, 116, 112–126. [Google Scholar] [CrossRef]
- Chen, X.; Li, Y.; Yu, J. PHD and CPHD Algorithms Based on a Novel Detection Probability Applied in an Active Sonar Tracking System. Appl. Sci. 2018, 8, 36. [Google Scholar] [CrossRef]
- Sijs, J.; Lazar, M. State fusion with unknown correlation: Ellipsoidal intersection. Automatica 2012, 48, 1874–1878. [Google Scholar] [CrossRef]
- Noack, B.; Sijs, J.; Reinhardt, M.; Hanebeck, U.D. Decentralized data fusion with inverse covariance intersection. Automatica 2017, 79, 35–41. [Google Scholar] [CrossRef]
- Gordon, N.; Ristic, B.; Arulampalam, S. Beyond the Kalman Filter: Particle Filters for Tracking Applications; Artech House: London, UK, 2004. [Google Scholar]
- Zhang, H.; Jing, Z.; Hu, S. Gaussian mixture CPHD filter with gating technique. Signal Process. 2009, 89, 1521–1530. [Google Scholar] [CrossRef]
- Macagnano, D.; de Abreu, G.T.F. Adaptive gating for multitarget tracking with Gaussian mixture filters. IEEE Trans. Signal Process. 2012, 60, 1533–1538. [Google Scholar] [CrossRef]
- Cheng, T.; Li, X.R.; He, Z. Comparison of gating techniques for maneuvering target tracking in clutter. In Proceedings of the 17th International Conference on Information Fusion, Salamanca, Spain, 7–10 July 2014; pp. 1–8. [Google Scholar]
- Si, W.; Wang, L.; Qu, Z. Multi-target tracking using an improved Gaussian mixture CPHD Filter. Sensors 2016, 16, 1964. [Google Scholar] [CrossRef] [PubMed]
- Clark, D.E.; Bell, J. Convergence results for the particle PHD filter. IEEE Trans. Signal Process. 2006, 54, 2652–2661. [Google Scholar]
- Johansen, A.M.; Singh, S.S.; Doucet, A.; Vo, B.N. Convergence of the SMC Implementation of the PHD Filte. Methodol. Comput. Appl. Probab. 2006, 8, 265–291. [Google Scholar] [CrossRef]
- Zarei-Jalalabadi, M.; Malaek, S.M.B. Practical method to predict an upper bound for minimum variance track-to-track fusion. IET Signal Process. 2017, 11, 961–968. [Google Scholar] [CrossRef]
- Niehsen, W. Information fusion based on fast covariance intersection filtering. In Proceedings of the 5th International Conference on Information Fusion, Annapolis, MD, USA, 8–11 July 2002; pp. 901–904. [Google Scholar]
- Deng, Z.; Zhang, P.; Qi, W.; Liu, J.; Gao, Y. Sequential covariance intersection fusion Kalman filter. Inf. Sci. 2012, 189, 293–309. [Google Scholar] [CrossRef]
- Li, W.; Wang, Z.; Wei, G.; Ma, L.; Hu, J.; Ding, D. A survey on multisensor fusion and consensus filtering for sensor networks. Discret. Dyn. Nat. Soc. 2015, 2015, 683701. [Google Scholar] [CrossRef]
- Kim, S.; Kang, C.; Park, C. Cardinality compensation method based on information-weighted consensus filter using data clustering for multi-target tracking. Chin. J. Aeronaut. 2019, 32, 2164–2173. [Google Scholar] [CrossRef]
- Mitch, R.H.; Dougherty, R.C.; Psiaki, M.L.; Powell, S.P.; O’Hanlon, B.W.; Bhatti, J.A.; Humphreys, T.E. Signal Characteristics of Civil GPS Jammers. In Proceedings of the 24th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2011), Portland, Oregon, 19–23 September 2001; pp. 1907–1919. [Google Scholar]
- Mitch, R.H.; Psiaki, M.L.; O’Hanlon, B.W.; Powell, S.P.; Bhatti, J.A. Civilian GPS Jammer Signal Tracking and Geolocation. In Proceedings of the 25th International Technical Meeting of the Satellite Division of the Institute of Navigation (ION GNSS 2012), Nashville, TN, USA, 17–21 September 2012; pp. 2901–2920. [Google Scholar]
- Schuhmacher, D.; Vo, B.T.; Vo, B.N. A consistent metric for performance evaluation of multi-object filters. IEEE Trans. Signal Process. 2008, 56, 3447–3457. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | OSPA | Computation Time [sec.] |
|---|---|---|
| C_CPHD | 16.2388 | 2.6815 |
| FCM_CPHD | 12.7585 | 2.7087 |
| CC_CPHD (without adaptation) | 6.6667 | 4.7724 |
| A_CPHD (Proposed) | 6.5437 | 4.7032 |
| Algorithm | OSPA | Computation Time [sec.] |
|---|---|---|
| C_CPHD | 17.2284 | 3.5796 |
| FCM_CPHD | 16.9158 | 3.7380 |
| CC_CPHD (without adaptation) | 7.1634 | 9.8984 |
| A_CPHD (Proposed) | 6.9683 | 9.4285 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, S.Y.; Kang, C.H.; Park, C.G. SMC-CPHD Filter with Adaptive Survival Probability for Multiple Frequency Tracking. Appl. Sci. 2022, 12, 1369. https://doi.org/10.3390/app12031369
Kim SY, Kang CH, Park CG. SMC-CPHD Filter with Adaptive Survival Probability for Multiple Frequency Tracking. Applied Sciences. 2022; 12(3):1369. https://doi.org/10.3390/app12031369
Chicago/Turabian StyleKim, Sun Young, Chang Ho Kang, and Chan Gook Park. 2022. "SMC-CPHD Filter with Adaptive Survival Probability for Multiple Frequency Tracking" Applied Sciences 12, no. 3: 1369. https://doi.org/10.3390/app12031369
APA StyleKim, S. Y., Kang, C. H., & Park, C. G. (2022). SMC-CPHD Filter with Adaptive Survival Probability for Multiple Frequency Tracking. Applied Sciences, 12(3), 1369. https://doi.org/10.3390/app12031369