
Modified Uncertainty Error Aware Estimation Model for Tracking the Path of Unmanned Aerial Vehicles

 , ,
, ,  ,
,  and
and
Abstract
1. Introduction
2. Tracking of UAVs Using a Kalman Filter Algorithm with Error and Uncertainty Sensitivity
2.1. Kalman Filter Algorithm
2.2. Error and Uncertainty Aware Kalman Filter Algorithm
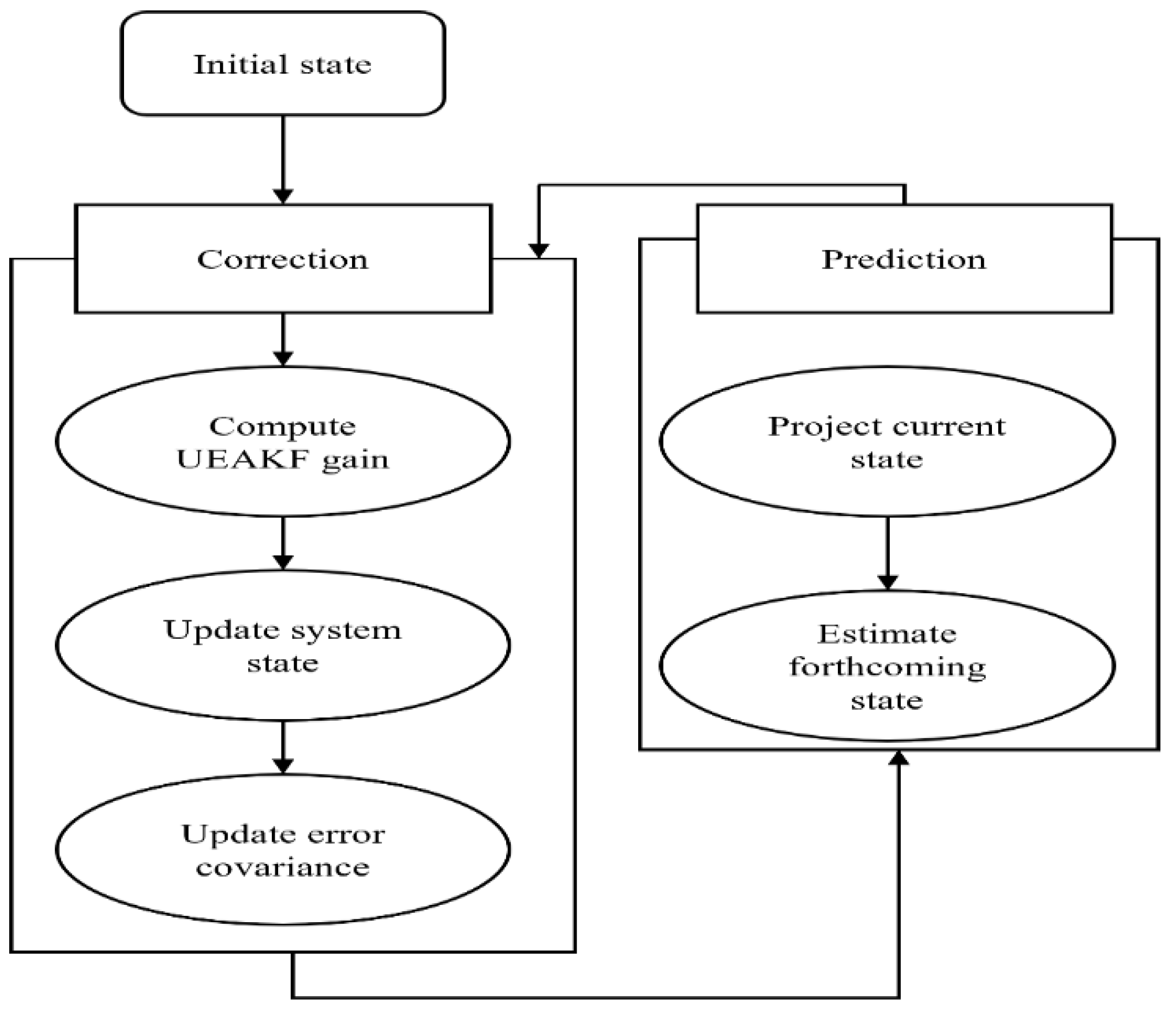
2.3. Prediction Phase
2.4. Updation Phase
2.5. Covariance Matrix
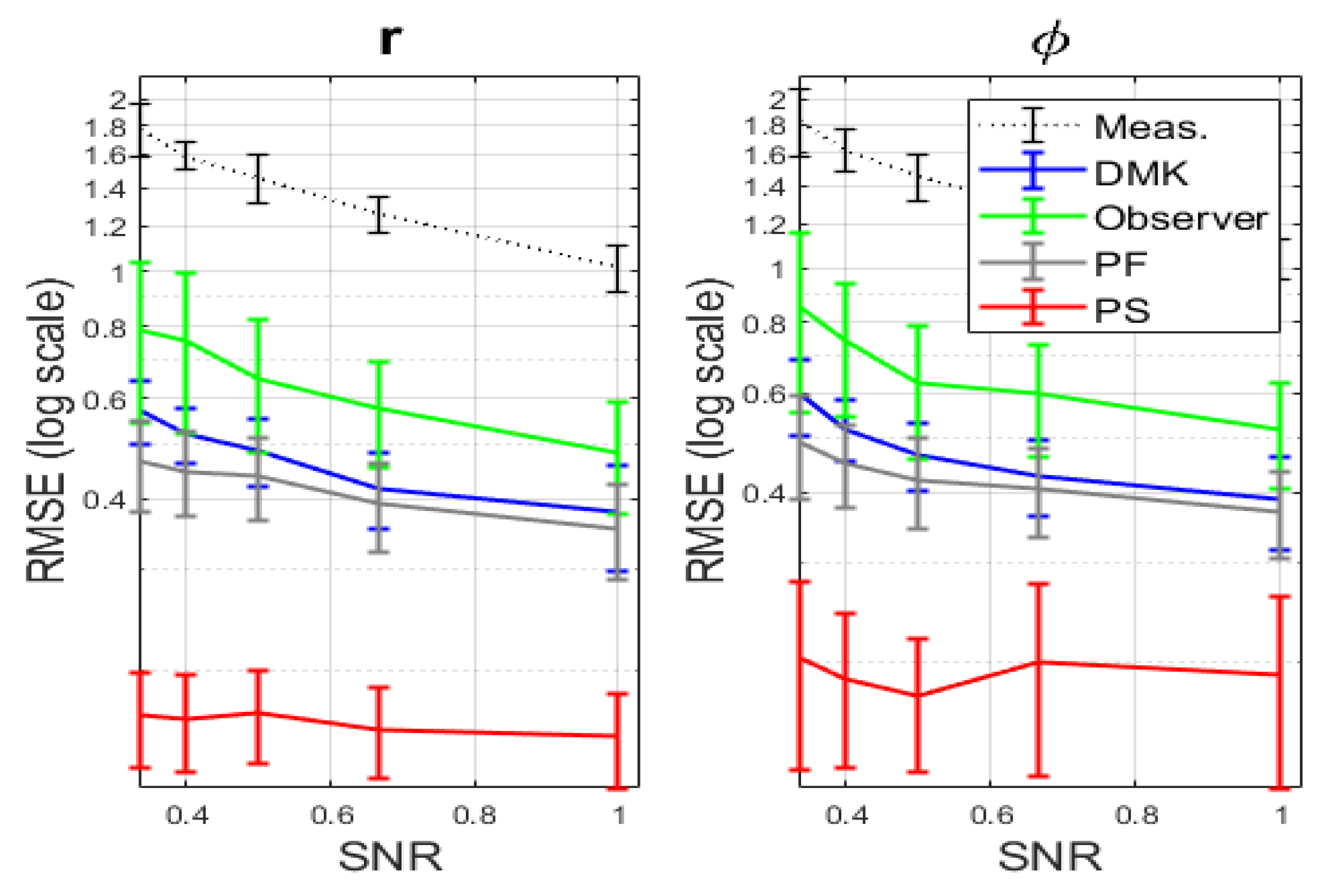
3. Simulation Analysis and Result
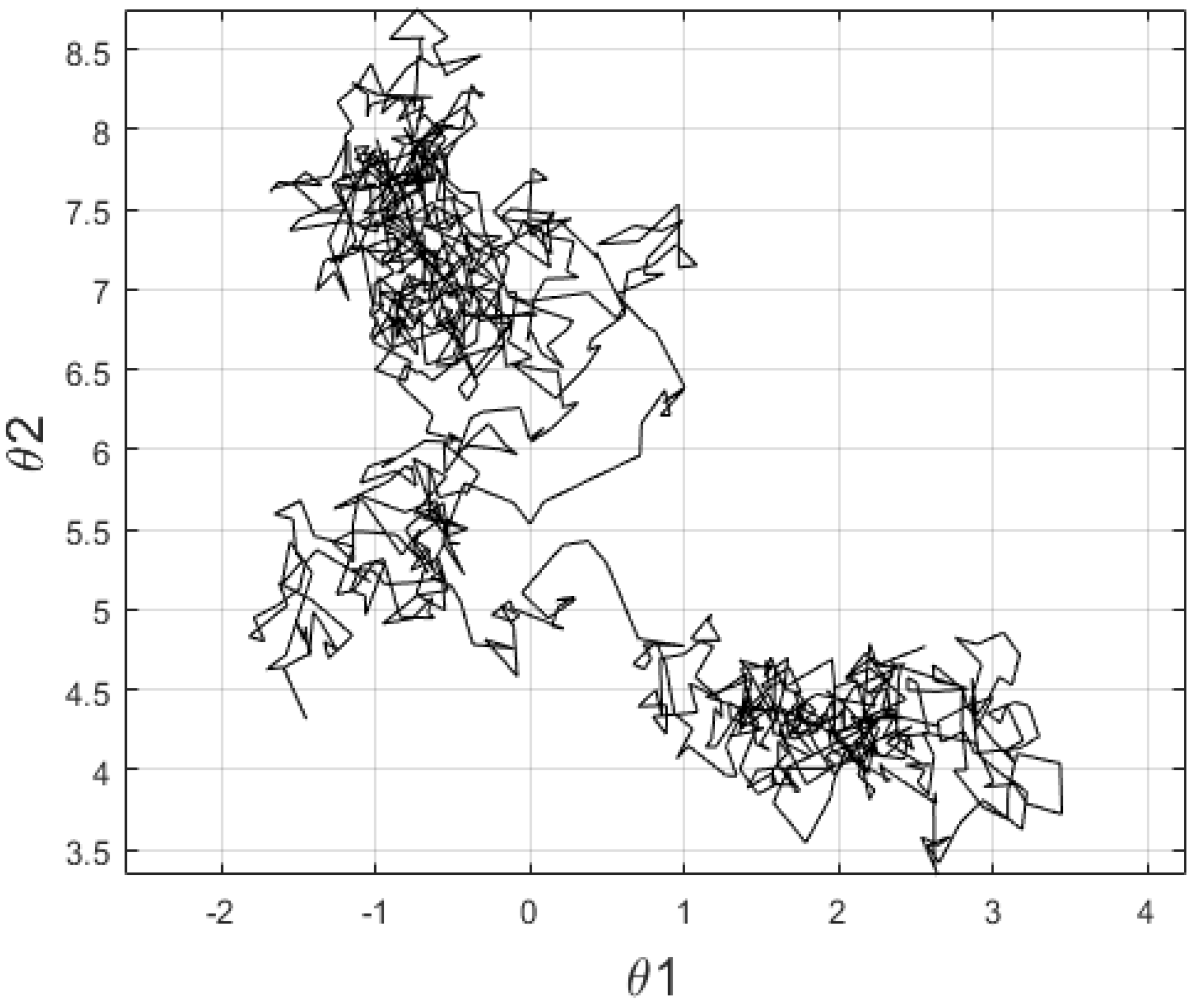
Nonlinear UAV Tracking Environment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hassanalian, M.; Rice, D.; Abdelkefi, A. Evolution of space drones for planetary exploration: A review. Prog. Aerosp. Sci. 2018, 97, 61–105. [Google Scholar] [CrossRef]
- Goldman Sachs Research. Drones Reporting for Work. 2017. Available online: http://www.goldmansachs.com/our-thinking/technology-driving-innovation/drones/ (accessed on 1 September 2020).
- Federal Aviation Administration. FAA Aerospace Forecast, FY 2016–2036. 2016. Available online: https://www.faa.gov/data_research/aviation/aerospace_forecasts/media/FY2016-36_FAA_Aerospace_Forecast.pdf (accessed on 17 August 2022).
- Wang, X.; Chowdhery, A.; Chiang, M. Skyeyes: Adaptive video streaming from UAVs. In Proceedings of the 3rd Workshop on Hot Topics in Wireless, New York, NY, USA, 3–7 October 2016; pp. 2–6. [Google Scholar]
- Haijun, W.; Haitao, Z.; Jiao, Z.; Dongtang, M.; Jiaxun, L.; Jibo, W. Survey on Unmanned Aerial Vehicle Networks: A Cyber Physical System Perspective. IEEE Commun. Surv. Tutor. 2020, 22, 1027–1070. [Google Scholar] [CrossRef]
- Jean-Paul, Y.; Hassan, N.; Ola, S.; Ali, C. Security analysis of drones systems: Attacks, limitations, and recommendations. Internet Things 2020, 11, 100218. [Google Scholar]
- Pietro, B.; Domenico, S.; Luigi, A.G. Internet of Drones: A Survey on Communications, Technologies, Protocols, Architectures and Services. arXiv 2020, arXiv:2007.12611. [Google Scholar]
- Naser, H.M.; Tarik, T.; Osama, A. Low-Altitude Unmanned Aerial Vehicles-Based Internet of Things Services: Comprehensive Survey and Future Perspectives. IEEE Internet Things J. 2016, 3, 899–922. [Google Scholar] [CrossRef]
- Riham, A.; Amr, M.Y. Security privacy and safety aspects of civilian drones: A survey. ACM Trans. Cyber-Phys. Syst. 2016, 1, 7. [Google Scholar]
- Ben, N.; Asaf, S.; Ryusuoke, M.; Yuval, E. SoK—Security and privacy in the age of drones: Threats challenges solution mechanisms and scientific gaps. arXiv 2019, arXiv:1903.05155. [Google Scholar]
- Matthew, R.; Francesco, F.; Herve, B. Micro UAV crime prevention: Can we help Princess Leia? In Crime Prevention in the 21st Century; LeClerc, B., Savona, E., Eds.; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Tamir, E. Mobile Radar Optimized to Detect UAVs, Precision Guided Weapons. Defense Update. 2013. Available online: https://defense-update.com/20130208_mobile-radar-optimized-to-detect-uavs-precision-guided-weapons.html (accessed on 22 July 2022).
- Zhang, D.X. Research on electromagnetic interference mechanism of main remote control data link of UAV. J. Microwave 2016, 32, 90–96. [Google Scholar]
- Jiang, Z.J.; Cheng, X.G.; Peng, Y.Q. Research on UAV identification algorithm based on deeplearning. App. Elec. Technol. 2017, 43, 84–87. [Google Scholar]
- Zhao, J.C.; Fu, X.R.; Yang, Z.K.; Xu, F.T. Radar-Assisted UAV Detection and Identification Based on 5G in the Internet of Things. Wirel. Commun. Mob. Comput. 2019, 2019, 2850263. [Google Scholar] [CrossRef]
- Schreiber, E.; Heinzel, A.; Peichl, M.; Engel, M.; Wiesbeck, W. Advanced buried object detection by multichannel, UAV/drone carried synthetic aperture radar. In Proceedings of the 2019 13th European Conference on Antennas and Propagation, Krakow, Poland, 31 March–5 April 2019; pp. 1–5. [Google Scholar]
- Dill, S.; Schreiber, E.; Engel, M.; Heinzel, A.; Peichl, M. A drone carried multichannel Synthetic Aperture Radar for advanced buried object detection. In Proceedings of the 2019 IEEE Radar Conference, Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar]
- Zhu, L.Z.; Zhao, H.C.; Xu, H.L.; Lu, X.Y.; Chen, S.; Zhang, S.N. Classification of Ground Vehicles Based on Micro-Doppler Effect and Singular Value Decomposition. In Proceedings of the 2019 IEEE Radar Conference, Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar]
- Harvey, A.C. Forecasting, Structural Time Series Models and the Kalman Filter; Cambridge University Press: Cambridge, UK, 1990. [Google Scholar]
- Liu, Z.X.; Xie, W.X.; Wang, P. Tracking a target using a cubature Kalman filter versus unbiased converted measurements. In Proceedings of the 2012 IEEE 11th International Conference on Signal Processing, Beijing, China, 21–25 October 2012; pp. 2130–2133. [Google Scholar]
- Zhang, X.C.; Guo, C.J. Cubature Kalman filters: Derivation and extension. Chin. Phys. B 2013, 22, 128401. [Google Scholar] [CrossRef]
- Chen, V.C.; Li, F.; Ho, S.S.; Wechsler, H. Micro-Doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Bordonaro, S.; Willett, P.; Bar-Shalom, Y. Decorrelated unbiased converted measurement Kalman filter. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 1431–1444. [Google Scholar] [CrossRef]
- Basso, G.F.; De Amorim, T.G.S.; Brito, A.V.; Nascimento, T.P. Kalman Filter with Dynamical Setting of Optimal Process Noise Covariance. IEEE Access 2017, 5, 8385–8393. [Google Scholar] [CrossRef]
- Mezi’c, I. Spectral properties of dynamical systems, model reduction and decompositions. Nonlin. Dyn. 2005, 41, 309–325. [Google Scholar] [CrossRef]
- Marko, B.; Ryan, M.; Igor, M. Applied koopmanism. Chaos Interdiscip. J. Nonlinear Sci. 2012, 22, 47510. [Google Scholar]
- Amit, S.; Andrzej, B. Linear observer synthesis for nonlinear systems using koopman operator framework. IFAC Pap. Online 2016, 49, 716–723. [Google Scholar]
- Williams, M.O.; Ioannis, G.K.; Clarence, W.R. A data-driven approximation of the koopman operator: Extending dynamic mode decomposition. J. Nonlinear Sci. 2015, 25, 1307–1346. [Google Scholar] [CrossRef]
- Klus, S.; Peter, K.; Christof, S. On the numerical approximation of the perron-frobenius and koopman operator. J. Comput. Dyn. 2016, 3, 51. [Google Scholar]
- Berry, T.; Dimitrios, G.; John, H. Nonparametric forecasting of low-dimensional dynamical systems. Phys. Rev. E 2015, 91, 32915. [Google Scholar] [CrossRef]
- Berry, T.; John, H. Nonparametric uncertainty quantification for stochastic gradient flows. SIAM/ASA J. Uncertain. Quantif. 2015, 3, 484–508. [Google Scholar] [CrossRef]
- Ronald, R.C.; Stephone, L. Diffusion maps. Appl. Comput. Harmon. Anal. 2006, 21, 5–30. [Google Scholar]
- Franz, H.; Tyrus, B.; Timothy, S. Ensemble kalman filtering without a model. Phys. Rev. X 2016, 6, 11021. [Google Scholar]
- Floris, T. Detecting strange attractors in fluid turbulence. In Dynamical Systems and Turbulence; Springer: Berlin/Heidelberg, Germany, 1981. [Google Scholar]
- Giannakis, D. Data-driven spectral decomposition and forecasting of ergodic dynamical systems. Appl. Comput. Harmon. Anal. 2017, 47, 338–396. [Google Scholar] [CrossRef]
- Shnitzer, T.; Talmon, R.; Slotine, J.-J. Diffusion Maps Kalman Filter for a Class of Systems with Gradient Flows. IEEE Trans. Signal Process. 2020, 68, 2739–2753. [Google Scholar] [CrossRef]
- Coifman, R.R.; Kevrekidis, I.G.; Lafon, S.; Maggioni, M.; Nadler, B. Diffusion maps, reduction coordinates, and low dimensional representation of stochastic systems. Multiscale Model. Simul. 2008, 7, 842–864. [Google Scholar] [CrossRef]
- Mahfouz, S.; Mourad-Chehade, F.; Honeine, P.; Farah, J.; Snoussi, H. Target Tracking Using Machine Learning and Kalman Filter in Wireless Sensor Networks. IEEE Sens. J. 2014, 14, 3715–3725. [Google Scholar] [CrossRef]
- Yunfeng, L.; Jidong, S.; Hamid, R.K.; Xiaoming, L. A Filtering Algorithm for Maneuvering Target Tracking Based on Smoothing Spline Fitting. Abstr. Appl. Anal. 2014, 2014, 127643. [Google Scholar]
- Papaiz, A.; Tonello, A.M. Azimuth and Elevation Dynamic Tracking of UAVs via 3-Axial ULA and Particle Filtering. Int. J. Aerosp. Eng. 2016, 2016, 7630950. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| State vector | |
| Environment matrices | |
| Added noise to the model | |
| States measurement | |
| Measurement matrices-Observed | |
| Estimation variance | |
| Zero mean Gaussian processes with uncorrelated covariance | |
| Zero mean Gaussian processes with optimized covariance | |
| Different state vectors | |
| Corresponding measurement | |
| Noise covariance matrix | |
| Dimensional matrices of state noise transition matrix | |
| Measurement covariance matrix | |
| Prior measurement of the covariance matrix | |
| Estimate difference | |
| State-transition matrix | |
| Equilibrium point | |
| Constraint used for measurement updates | |
| square diagonal matrix | |
| Expected trajectory | |
| Update this estimate as an argument | |
| Maximum added noise | |
| The minimum and the maximum noise can be added to the model | |
| Constraint parameter used for measuring the covariance matrix | |
| represent the Gaussian with zero mean and uniform covariance |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fu, R.; Al-Absi, M.A.; Lee, Y.-S.; Al-Absi, A.A.; Lee, H.J. Modified Uncertainty Error Aware Estimation Model for Tracking the Path of Unmanned Aerial Vehicles. Appl. Sci. 2022, 12, 11313. https://doi.org/10.3390/app122211313
Fu R, Al-Absi MA, Lee Y-S, Al-Absi AA, Lee HJ. Modified Uncertainty Error Aware Estimation Model for Tracking the Path of Unmanned Aerial Vehicles. Applied Sciences. 2022; 12(22):11313. https://doi.org/10.3390/app122211313
Chicago/Turabian StyleFu, Rui, Mohammed Abdulhakim Al-Absi, Young-Sil Lee, Ahmed Abdulhakim Al-Absi, and Hoon Jae Lee. 2022. "Modified Uncertainty Error Aware Estimation Model for Tracking the Path of Unmanned Aerial Vehicles" Applied Sciences 12, no. 22: 11313. https://doi.org/10.3390/app122211313
APA StyleFu, R., Al-Absi, M. A., Lee, Y.-S., Al-Absi, A. A., & Lee, H. J. (2022). Modified Uncertainty Error Aware Estimation Model for Tracking the Path of Unmanned Aerial Vehicles. Applied Sciences, 12(22), 11313. https://doi.org/10.3390/app122211313