
Hybrid Adaptive Dynamic Inverse Compensation for Hypersonic Vehicles with Inertia Uncertainty and Disturbance


Abstract
1. Introduction
2. Model and Nominal NDI Control
2.1. Longitudinal Model
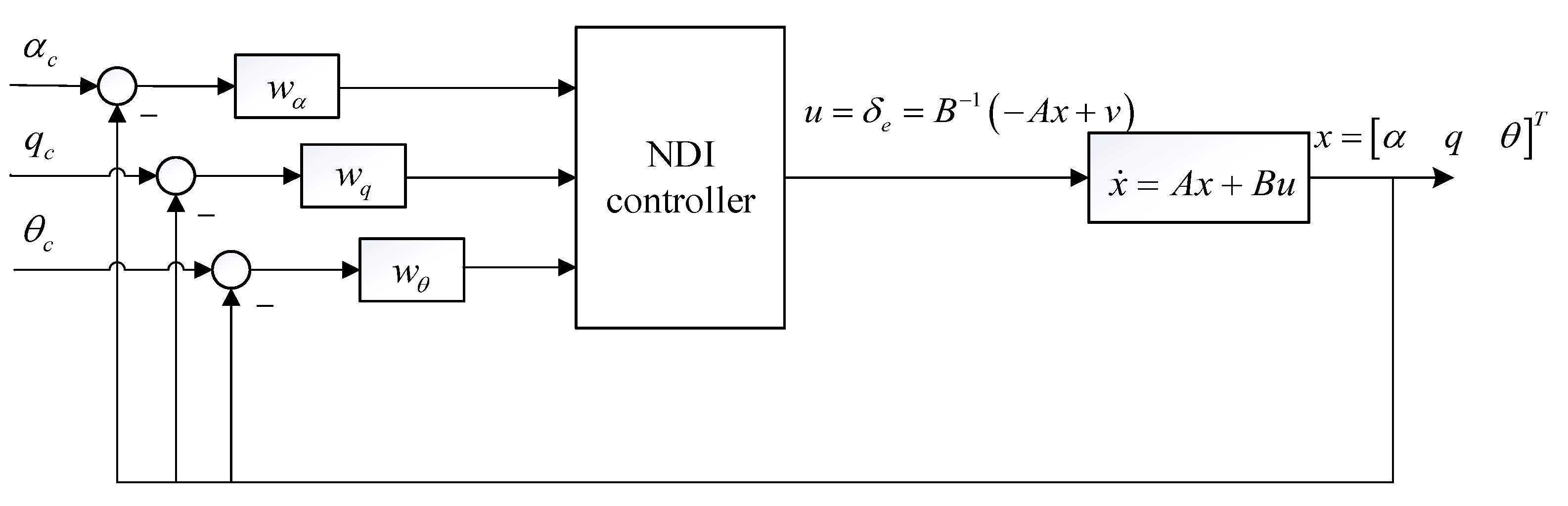
2.2. Nominal NDI Controller Design
3. Hybrid Compensation Scheme
- (1)
- Considering the longitudinal two-degree-of-freedom small perturbation model, how to deal with the nonlinear term in the linearized system, and how to apply the nonlinear control method to design the nonlinear control law in the model;
- (2)
- Considering the parameter uncertainty of the moment of inertia in the system, how to design a suitable Lyapunov function for the state quantity and error of the system to obtain the adaptive law.
3.1. Adaptive NDI Controller for Inertia Uncertainty
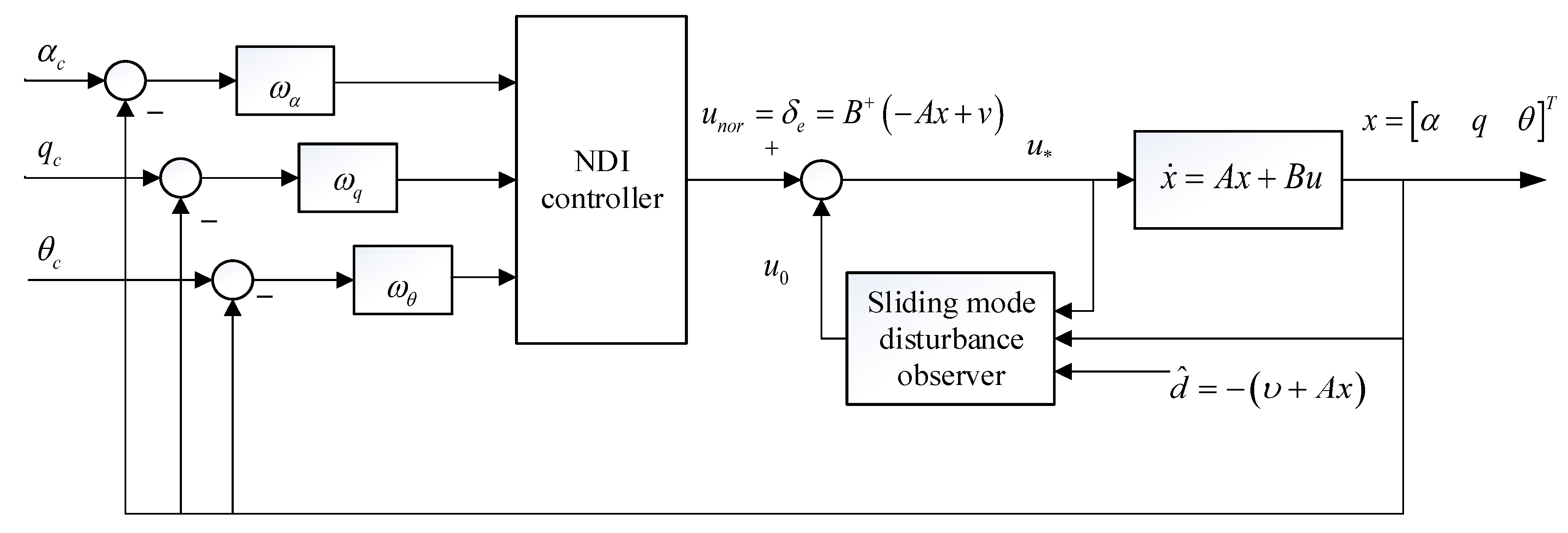
3.2. Active Sliding Mode NDI Controller for Disturbance
4. Simulation Results and Analysis
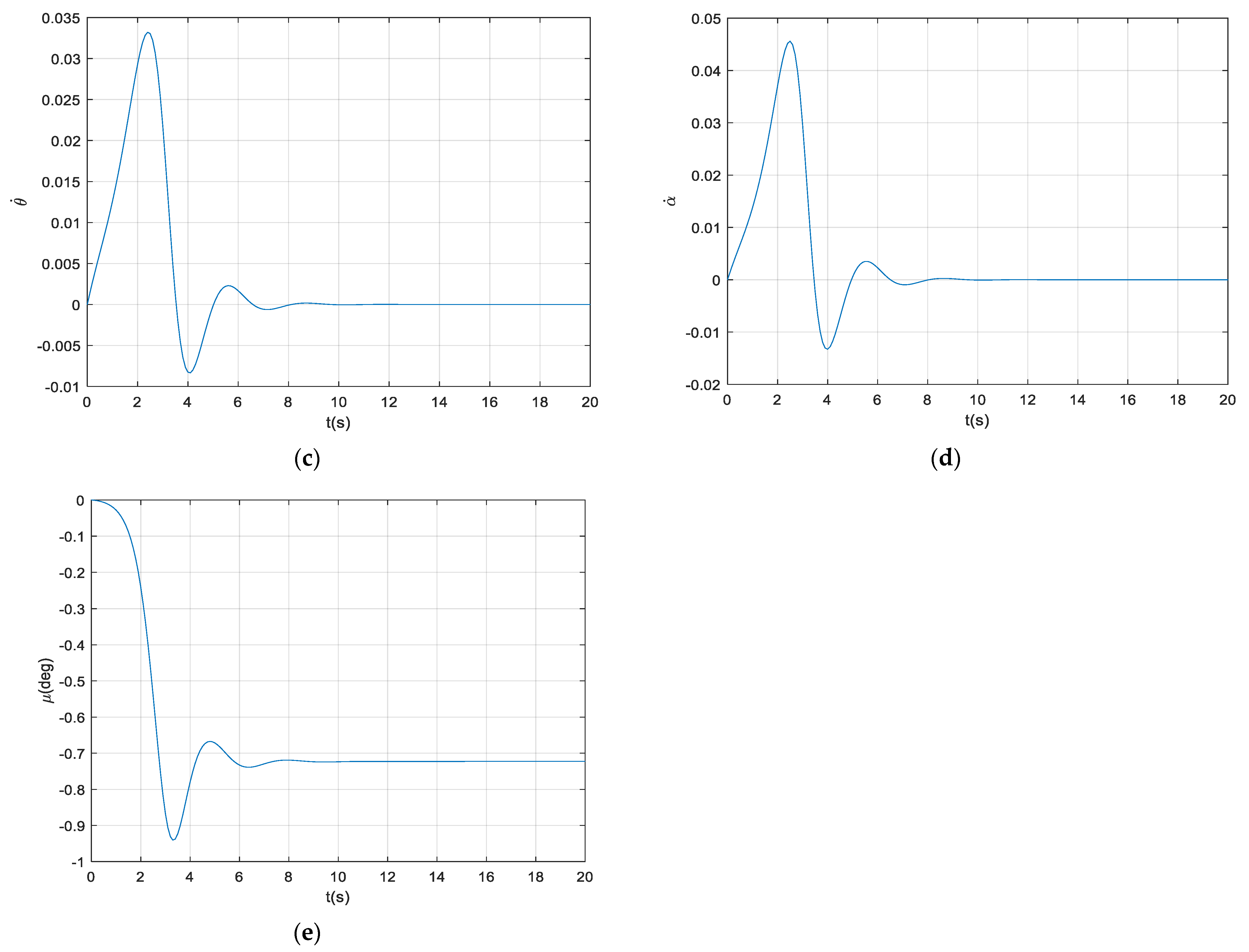
4.1. Nominal NDI Controller Simulation
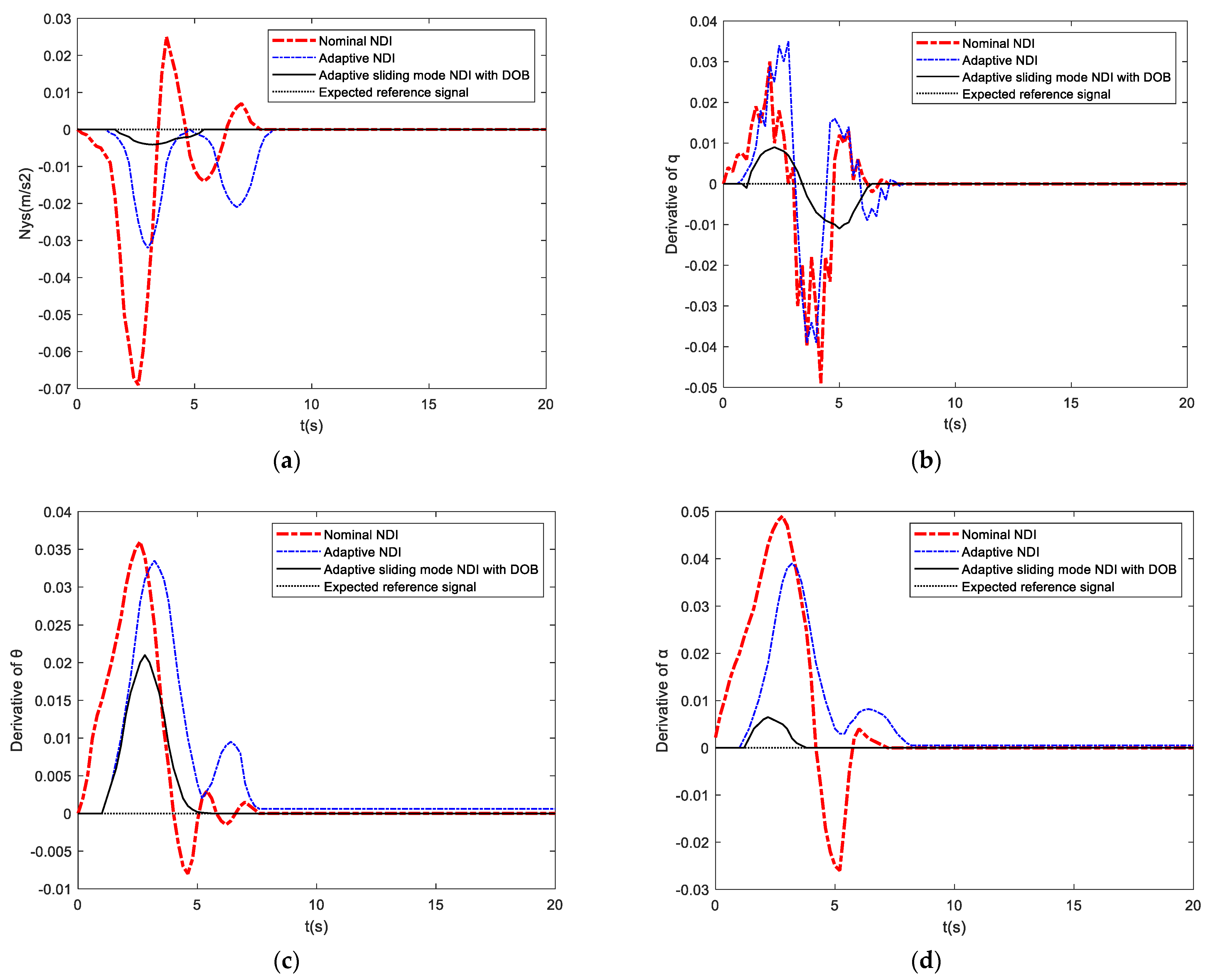
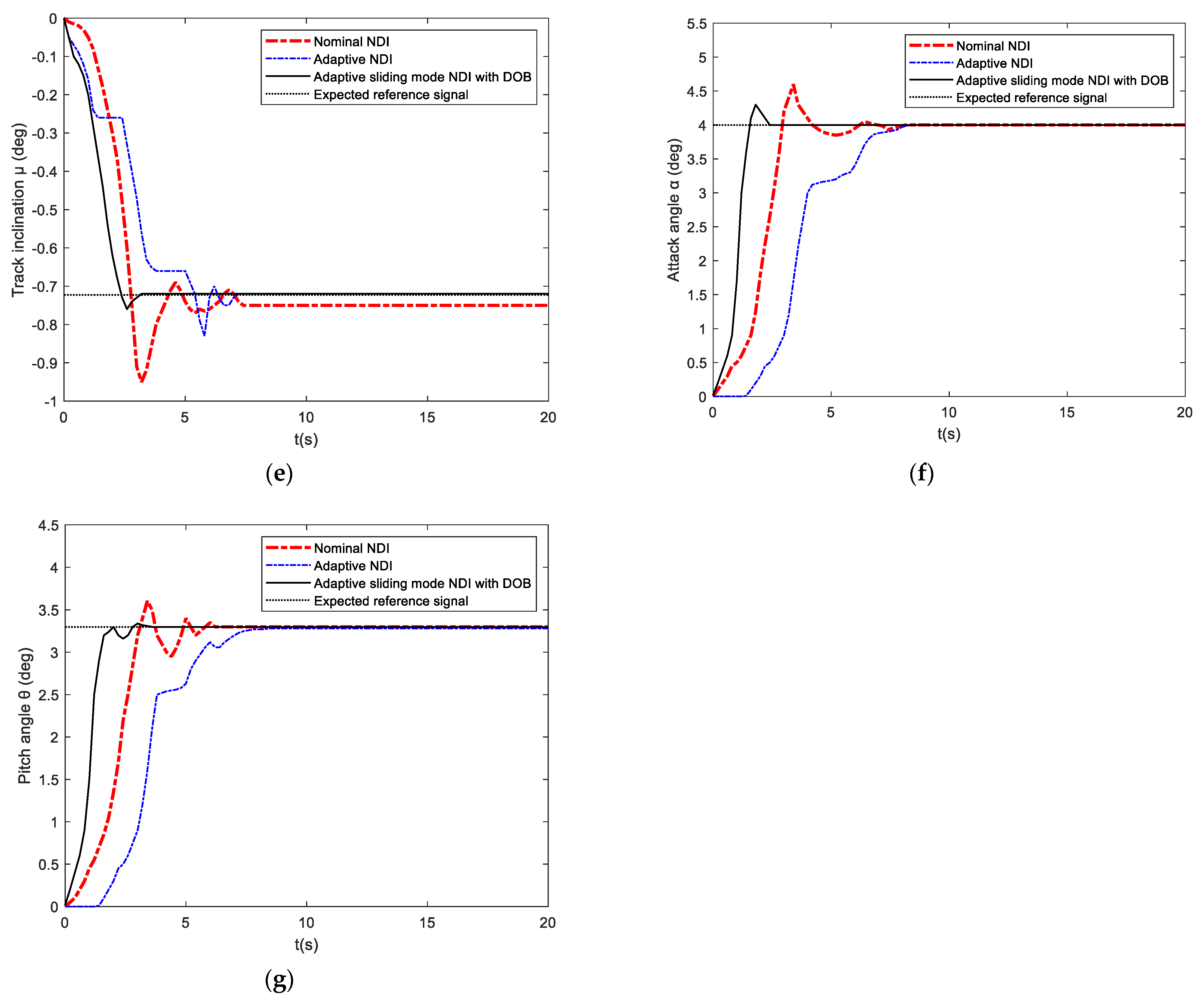
4.2. Hybrid Adaptive Compensation Simulation of Sliding Mode NDI
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Han, T.; Hu, Q.; Shin, H.; Tsourdos, A.; Xin, M. Incremental twisting fault tolerant control for hypersonic vehicles with partial model knowledge. IEEE Trans. Ind. Inform. 2022, 18, 1050–1060. [Google Scholar] [CrossRef]
- Xu, B.; Shi, Z.; Sun, F.; He, W. Barrier lyapunov function based learning control of hypersonic flight vehicle with AOA constraint and actuator faults. IEEE Trans. Cybern. 2019, 49, 1047–1057. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Yang, X.; Yan, H. Reliable fuzzy tracking control of near-space hypersonic vehicle using aperiodic measurement information. IEEE Trans. Ind. Electron. 2019, 66, 9439–9447. [Google Scholar] [CrossRef]
- Bu, X.; Xiao, Y.; Lei, H. An adaptive critic design-based fuzzy neural controller for hypersonic vehicles: Predefined behavioral nonaffine control. IEEE/ASME Trans. Mechatron. 2019, 24, 1871–1881. [Google Scholar] [CrossRef]
- Sun, J.; Yi, J.; Pu, Z.; Tan, X. Fixed-time sliding mode disturbance observer-based nonsmooth backstepping control for hypersonic vehicles. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4377–5386. [Google Scholar] [CrossRef]
- Ren, W.; Jiang, B.; Yang, H. Singular perturbation-based fault-tolerant control of the air-breathing hypersonic vehicle. IEEE ASME Trans. Mechatron. 2019, 24, 2562–2571. [Google Scholar] [CrossRef]
- Li, F.; Xiong, J.; Lan, X.; Bi, H.; Chen, X. NSHV trajectory prediction algorithm based on aerodynamic acceleration EMD decomposition. J. Syst. Eng. Electron. 2021, 32, 103–117. [Google Scholar]
- Sun, J.; Yi, J.; Pu, Z.; Liu, Z. Adaptive fuzzy nonsmooth backstepping output-feedback control for hypersonic vehicles with finite-time convergence. IEEE Trans. Fuzzy Syst. 2020, 28, 2320–2334. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Nasim, U. Neuroadaptive control of saturated nonlinear systems with disturbance compensation. ISA Trans. 2022, 122, 49–62. [Google Scholar] [CrossRef]
- Yang, G.; Yao, J.; Dong, Z. Neuroadaptive learning algorithm for constrained nonlinear systems with disturbance rejection. Int. J. Robust Nonlinear Control 2022, 32, 6127–6147. [Google Scholar] [CrossRef]
- Guo, Z.; Guo, J.; Zhou, J.; Chang, J. Robust tracking for hypersonic reentry vehicles via disturbance estimation-triggered control. IEEE Trans. Aerosp. Electron. Syst. 2020, 56, 1279–1289. [Google Scholar] [CrossRef]
- Hu, Y.; Geng, Y.; Wu, B.; Wang, D. Model-free prescribed performance control for spacecraft attitude tracking. IEEE Trans. Control Syst. Technol. 2021, 29, 165–179. [Google Scholar] [CrossRef]
- Sun, J.; Pu, Z.; Yi, J.; Liu, Z. Fixed-time control with uncertainty and measurement noise suppression for hypersonic vehicles via augmented sliding mode observers. IEEE Trans. Ind. Inform. 2020, 16, 1192–1203. [Google Scholar] [CrossRef]
- Mu, C.; Ni, Z.; Sun, C.; He, H. Air-breathing hypersonic vehicle tracking control based on adaptive dynamic programming. IEEE Trans. Neural Netw. Learn. Syst. 2017, 28, 584–598. [Google Scholar] [CrossRef]
- Zhang, M.; Ali, N.; Gao, Q. Winding inductance and performance prediction of a switched reluctance motor with an exterior-rotor considering the magnetic saturation. CES Trans. Electr. Mach. Syst. 2021, 5, 212–223. [Google Scholar] [CrossRef]
- Ma, G.; Chen, C.; Lyu, Y.; Guo, Y. Adaptive backstepping-based neural network control for hypersonic reentry vehicle with input constraints. IEEE Access 2018, 6, 1954–1966. [Google Scholar] [CrossRef]
- Chen, L.; Wang, Q.; Ye, H.; He, G. Low-complexity adaptive tracking control for unknown pure feedback nonlinear systems with multiple constraints. IEEE Access 2019, 7, 27615–27627. [Google Scholar] [CrossRef]
- Meng, F.; Tian, K.; Wu, C. Deep reinforcement learning-based radar network target assignment. IEEE Sens. J. 2021, 21, 16315–16327. [Google Scholar] [CrossRef]
- An, H.; Liu, J.; Wang, C.; Wu, L. Disturbance observer-based antiwindup control for air-breathing hypersonic vehicles. IEEE Trans. Ind. Electron. 2016, 63, 3038–3049. [Google Scholar] [CrossRef]
- Yu, X.; Li, P.; Zhang, Y. Fixed-time actuator fault accommodation applied to hypersonic gliding vehicles. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1429–1440. [Google Scholar] [CrossRef]
- Gao, K.; Song, J.; Wang, X.; Li, H. Fractional-order proportional-integral-derivative linear active disturbance rejection control design and parameter optimization for hypersonic vehicles with actuator faults. Tsinghua Sci. Technol. 2021, 26, 9–23. [Google Scholar] [CrossRef]
- Cui, B.; Xia, Y.; Liu, K.; Zhang, J.; Wang, Y.; Shen, G. Truly distributed finite-time attitude formation-containment control for networked uncertain rigid spacecraft. IEEE Trans. Cybern. 2022, 52, 5882–5896. [Google Scholar] [CrossRef] [PubMed]
- Ai, S.; Song, J.; Cai, G. Diagnosis of sensor faults in hypersonic vehicles using wavelet packet translation based support vector regressive classifier. IEEE Trans. Reliab. 2021, 70, 901–915. [Google Scholar] [CrossRef]
- Li, J.; Chen, S.; Li, C.; Wang, F. Distributed game strategy for formation flying of multiple spacecraft with disturbance rejection. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 119–128. [Google Scholar] [CrossRef]
- Li, Y. Finite time command filtered adaptive fault tolerant control for a class of uncertain nonlinear systems. Automatica 2019, 106, 117–123. [Google Scholar] [CrossRef]
- Hu, K.; Li, W.; Cheng, Z. Fuzzy adaptive fault diagnosis and compensation for variable structure hypersonic vehicle with multiple faults. PLoS ONE 2021, 16, e0256200. [Google Scholar] [CrossRef] [PubMed]
- Hu, K.; Chen, F.; Cheng, Z. Fuzzy adaptive hybrid compensation for compound faults of hypersonic flight vehicle. Int. J. Control Autom. Syst. 2021, 19, 2269–2283. [Google Scholar] [CrossRef]
- Du, Y.; Jiang, B.; Ma, Y.; Cheng, Y. Robust ADP-based sliding-mode fault-tolerant control for nonlinear systems with application to spacecraft. Appl. Sci. 2022, 12, 1673. [Google Scholar] [CrossRef]
- Xiao, B.; Hu, Q.; Wang, D.; Eng, K. Attitude tracking control of rigid spacecraft with actuator misalignment and fault. IEEE Trans. Control Syst. Technol. 2013, 21, 2360–2366. [Google Scholar] [CrossRef]
- Su, J.; Chen, W. Model-based fault diagnosis system verification using reachability analysis. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 742–751. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Meaning | Unit | |
|---|---|---|
| α | Attack angle | rad |
| q | Pitch rate | rad/s |
| θ | Pitch angle | rad |
| Attack angle derivative | rad/s | |
| Pitch rate derivative | rad/s2 | |
| Pitch rate | rad/s | |
| δe | Elevator deflection angle | rad |
| μ* | Track inclination | deg |
| V* | Flight speed | m/s |
| m | Aircraft mass | kg |
| S | Wing area | m2 |
| b | Span | m |
| Iy | Pitch inertia | kg·m2 |
| Cz,α | Attack angle lift coefficient | n.d. |
| Lift coefficient due to elevator deflection angle | n.d. | |
| Pitching moment coefficient due to attack angle | n.d. | |
| Pitching moment coefficient due to elevator deflection angle | n.d. | |
| Pitching moment coefficient due to attack angle rate | n.d. | |
| Pitch moment coefficient due to pitch rate | n.d. | |
| Derivative of lift coefficient with respect to attack angle | n.d. | |
| Derivative of lift coefficient with respect to elevator deflection angle | n.d. | |
| Mzα | Longitudinal static stability derivative | n.d. |
| Derivative of pitch moment coefficient to elevator deflection angle | n.d. | |
| Derivative of pitch moment coefficient with respect to attack angle rate | n.d. | |
| Mzq | Derivative of pitch moment coefficient with respect to pitch rate | n.d. |
| Parameter Meaning | Symbol | Parameter Value |
|---|---|---|
| HFV mass | m | 9295.44 kg |
| Pitch moment of inertia | Iy | 75,673.8 kg·m2 |
| Reference wing area | S | 28.87 m2 |
| Span | b | 9.144 m2 |
| Air density | ρ | 1.22 kg/m3 |
| Flight speed | V | 5104.41 m/s |
| Track inclination angle | μ | 0 deg (°) |
| Acceleration due to gravity | g | 9.806 m/s2 |
| Nominal NDI | Adaptive NDI | Adaptive Sliding Mode NDI | |
|---|---|---|---|
| ts,max | 7.95 | 7.99 | 5.28 |
| ts,min | 5.01 | 5.10 | 1.61 |
| ess,max | 0.03 | 0.001 | 0.0004 |
| ess,min | 0.0003 | 0.0002 | 0.0001 |
| ov,max | 30.56% | 13.89% | 7.50% |
| ov,min | 18.18% | 0.005% | 0.03% |
| HFV without Uncertainty, Disturbance, and Model Error | HFV in This Paper | |
|---|---|---|
| ts,max | 5.15 | 5.28 |
| ts,min | 2.51 | 1.61 |
| ess,max | 0.0003 | 0.0004 |
| ess,min | 0.0001 | 0.0001 |
| ov,max | 3.96% | 7.50% |
| ov,min | 0.001% | 0.03% |
| State-of-Art Method | Proposed Method | |
|---|---|---|
| ts,max | 27.27 | 5.28 |
| ts,min | 10.01 | 1.61 |
| ess,max | 12.29 | 0.0004 |
| ess,min | 1.3 | 0.0001 |
| ov,max | 166.76% | 7.50% |
| ov,min | 38.63% | 0.03% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, K.-Y.; Wang, X.; Yang, C. Hybrid Adaptive Dynamic Inverse Compensation for Hypersonic Vehicles with Inertia Uncertainty and Disturbance. Appl. Sci. 2022, 12, 11032. https://doi.org/10.3390/app122111032
Hu K-Y, Wang X, Yang C. Hybrid Adaptive Dynamic Inverse Compensation for Hypersonic Vehicles with Inertia Uncertainty and Disturbance. Applied Sciences. 2022; 12(21):11032. https://doi.org/10.3390/app122111032
Chicago/Turabian StyleHu, Kai-Yu, Xiaochen Wang, and Chunxia Yang. 2022. "Hybrid Adaptive Dynamic Inverse Compensation for Hypersonic Vehicles with Inertia Uncertainty and Disturbance" Applied Sciences 12, no. 21: 11032. https://doi.org/10.3390/app122111032
APA StyleHu, K.-Y., Wang, X., & Yang, C. (2022). Hybrid Adaptive Dynamic Inverse Compensation for Hypersonic Vehicles with Inertia Uncertainty and Disturbance. Applied Sciences, 12(21), 11032. https://doi.org/10.3390/app122111032