

Combining Knowledge and a Data Driven Method for Identifying the Gas Kick Type in a Fractured Formation


Abstract
:1. Introduction
2. Materials and Methods
2.1. Physical Modeling and Characterization of the Gas Kick in Fractured Reservoirs
2.1.1. Physical Model and Basic Assumptions
2.1.2. Wellbore Two-Phase Flow Model under Well Surge Conditions
2.1.3. Gas Kick Model
2.1.4. Model Solution
2.1.5. Model Initialization
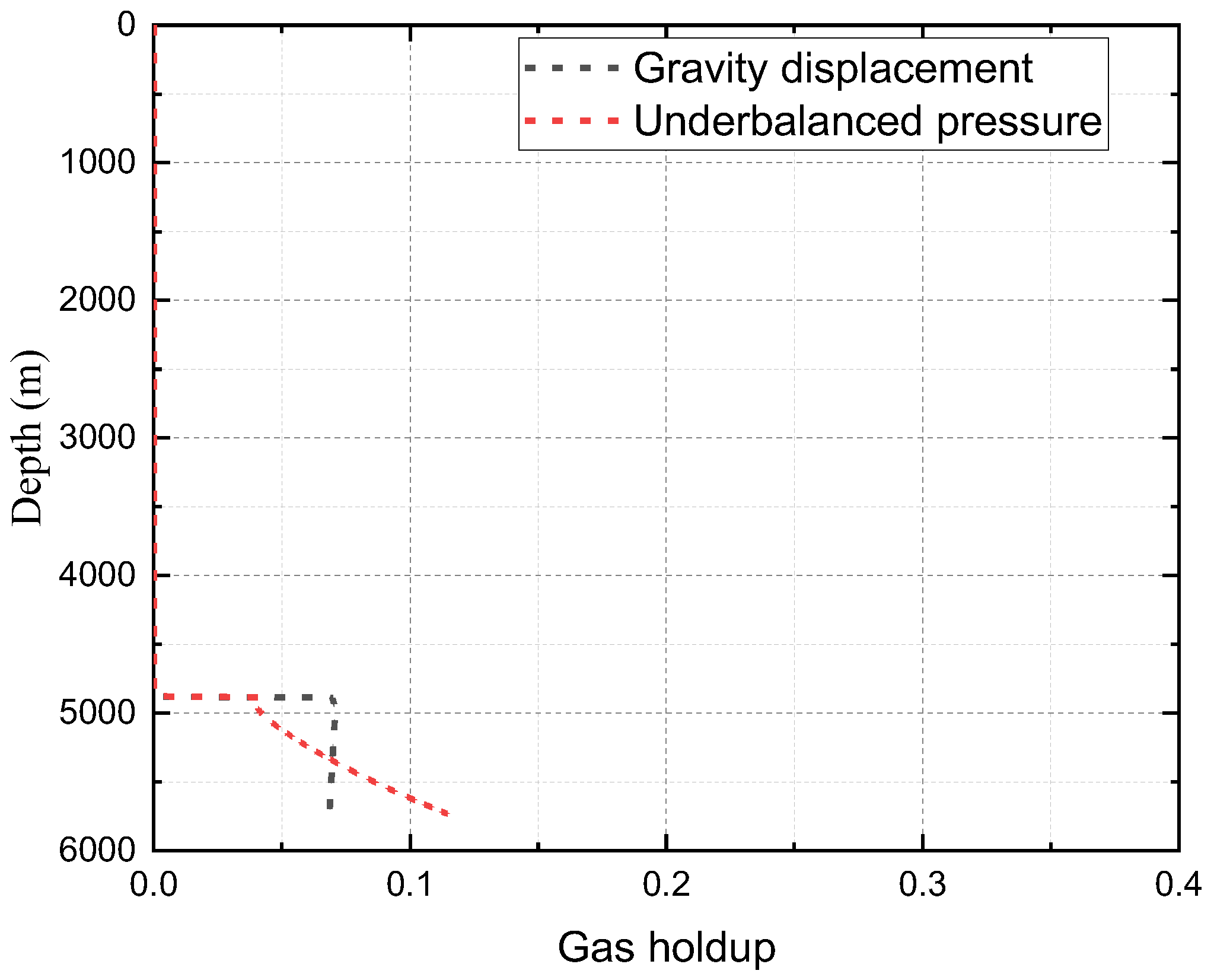
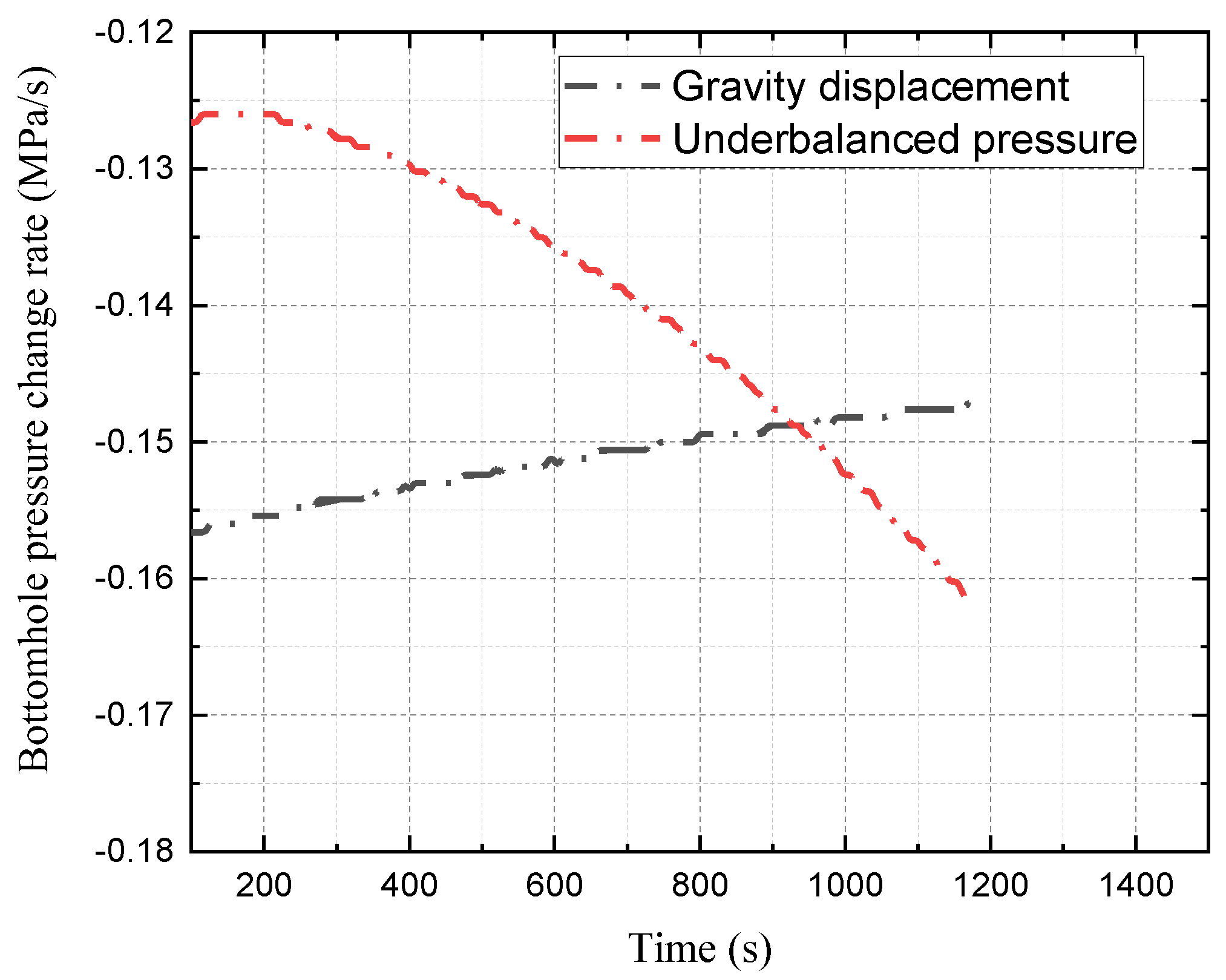
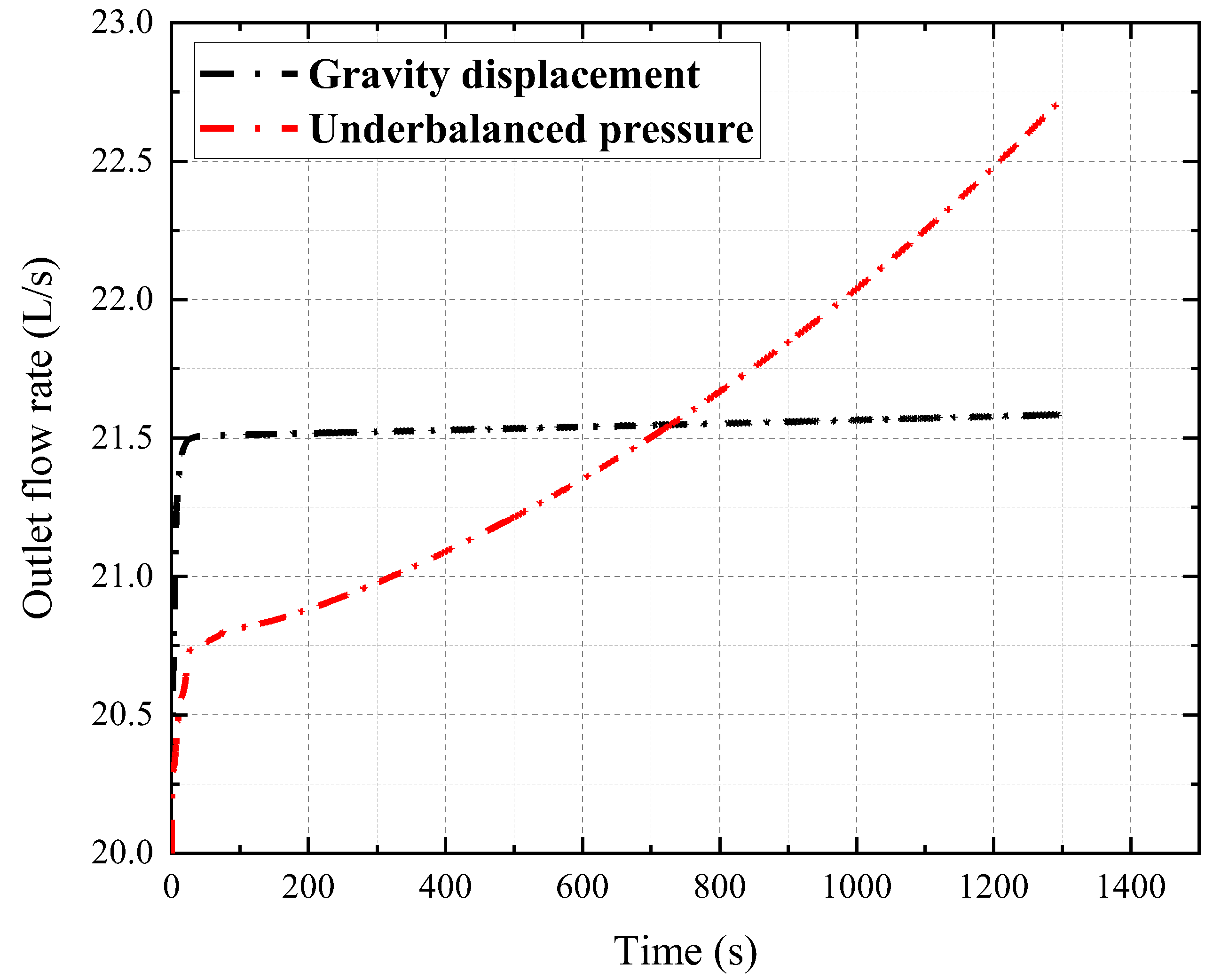
2.1.6. Characteristics Comparison of the Gas Kicks
2.2. Data-Driven Modeling of the Gas Kick Type Identification
2.2.1. DTW Algorithm
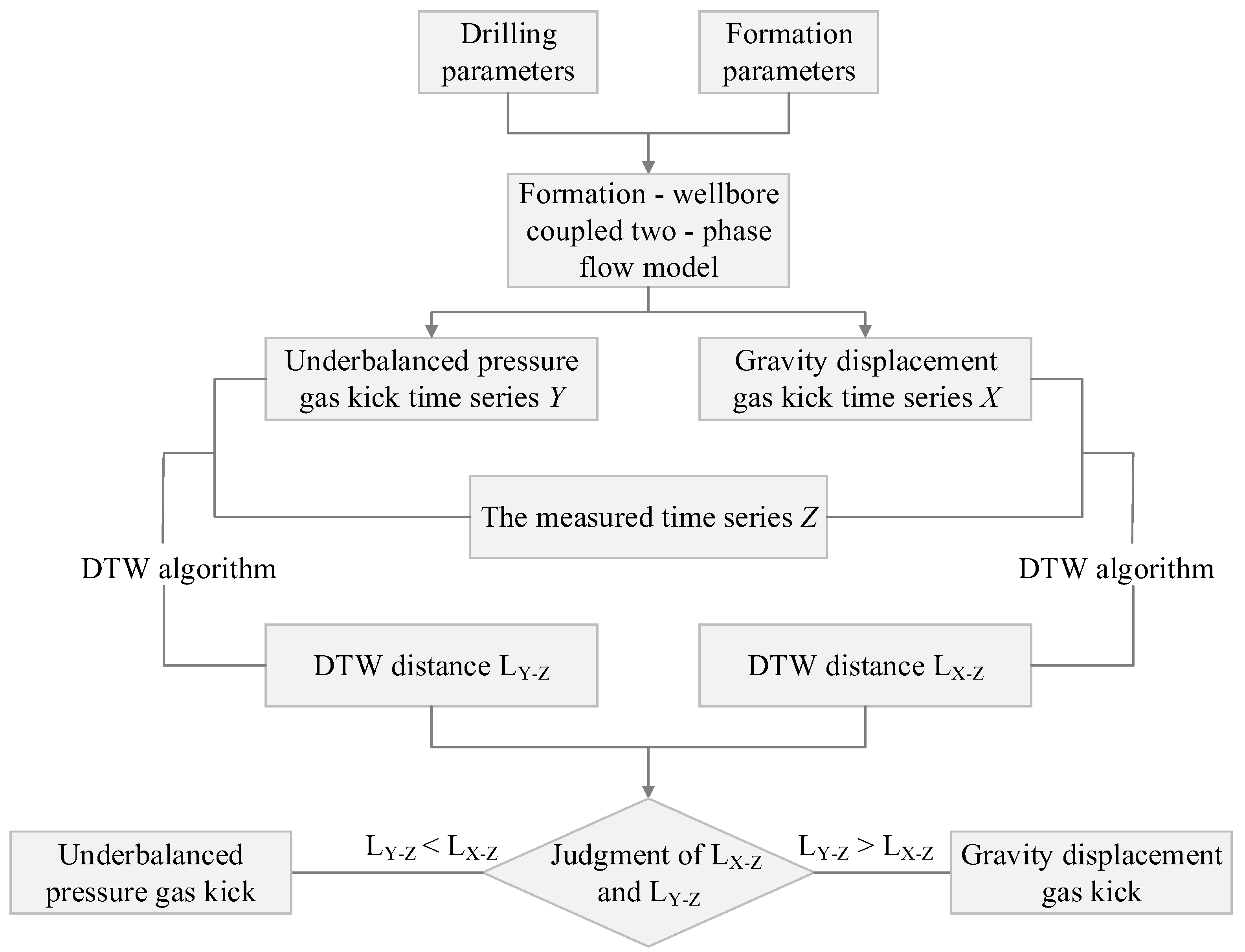
2.2.2. DTW Based Identification Process of the Gas Kick Type
3. Results and Discussions
3.1. Results
- (1)
- The calculation period is 0 to 600 s
- (2)
- The calculation period is 0 to 1000 s
- (3)
- The calculation period is 0 to 1300 s
3.2. Discussions
- (1)
- Comparison with the current method
- (2)
- DTW Computational Feature Analysis
4. Conclusions
- (1)
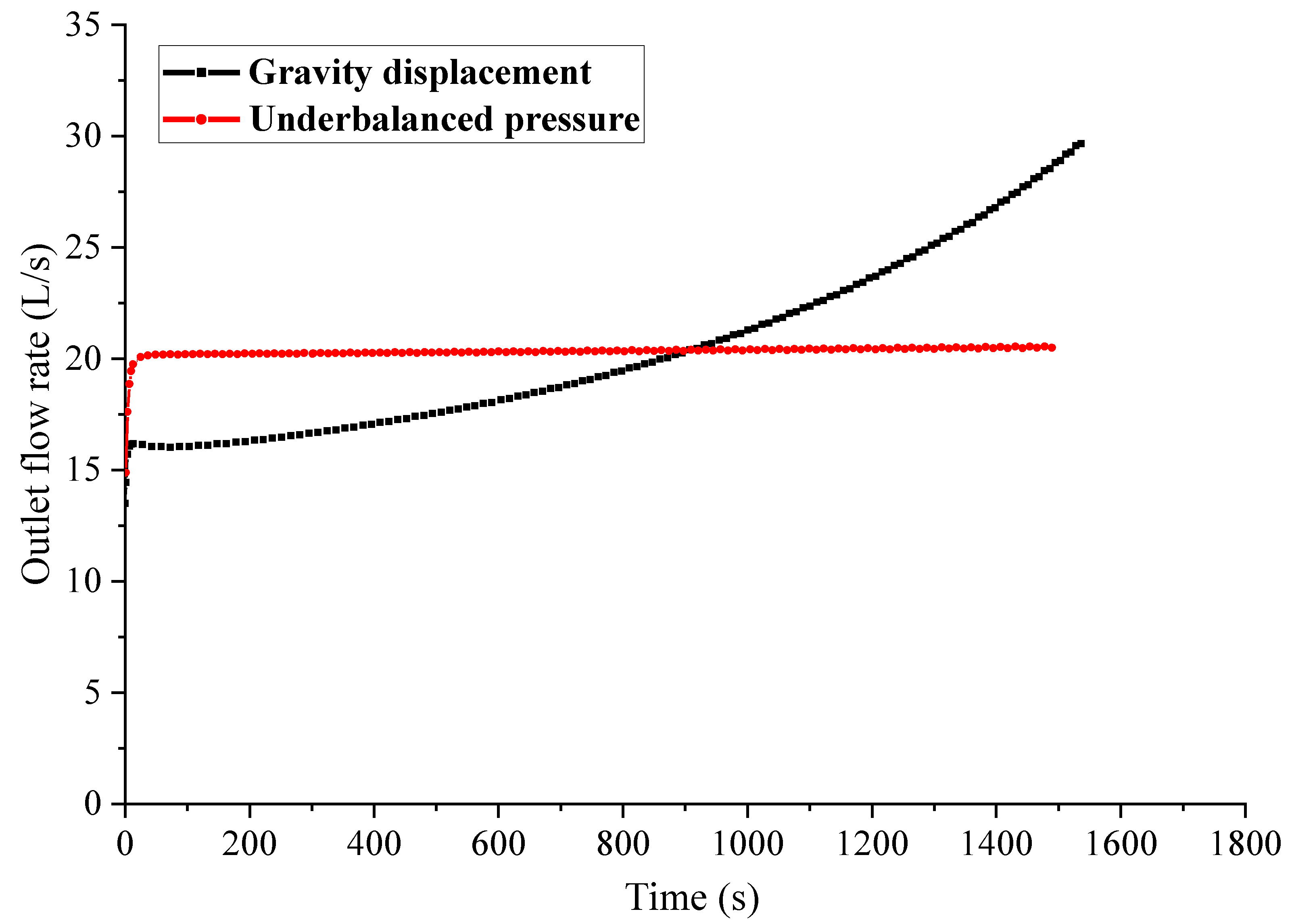
- Based on the transient two-phase drift flow model with wellbore-formation coupling, the changes of the bottomhole pressure, gas holdup distribution and wellhead flow parameters during an underbalanced pressure gas kick and gravity displacement gas kick, are simulated and analyzed. Although both exhibit an increase in pit gain and a decrease in bottomhole pressure, there is a difference in the rate of change in the bottomhole pressure and pit gain.
- (2)
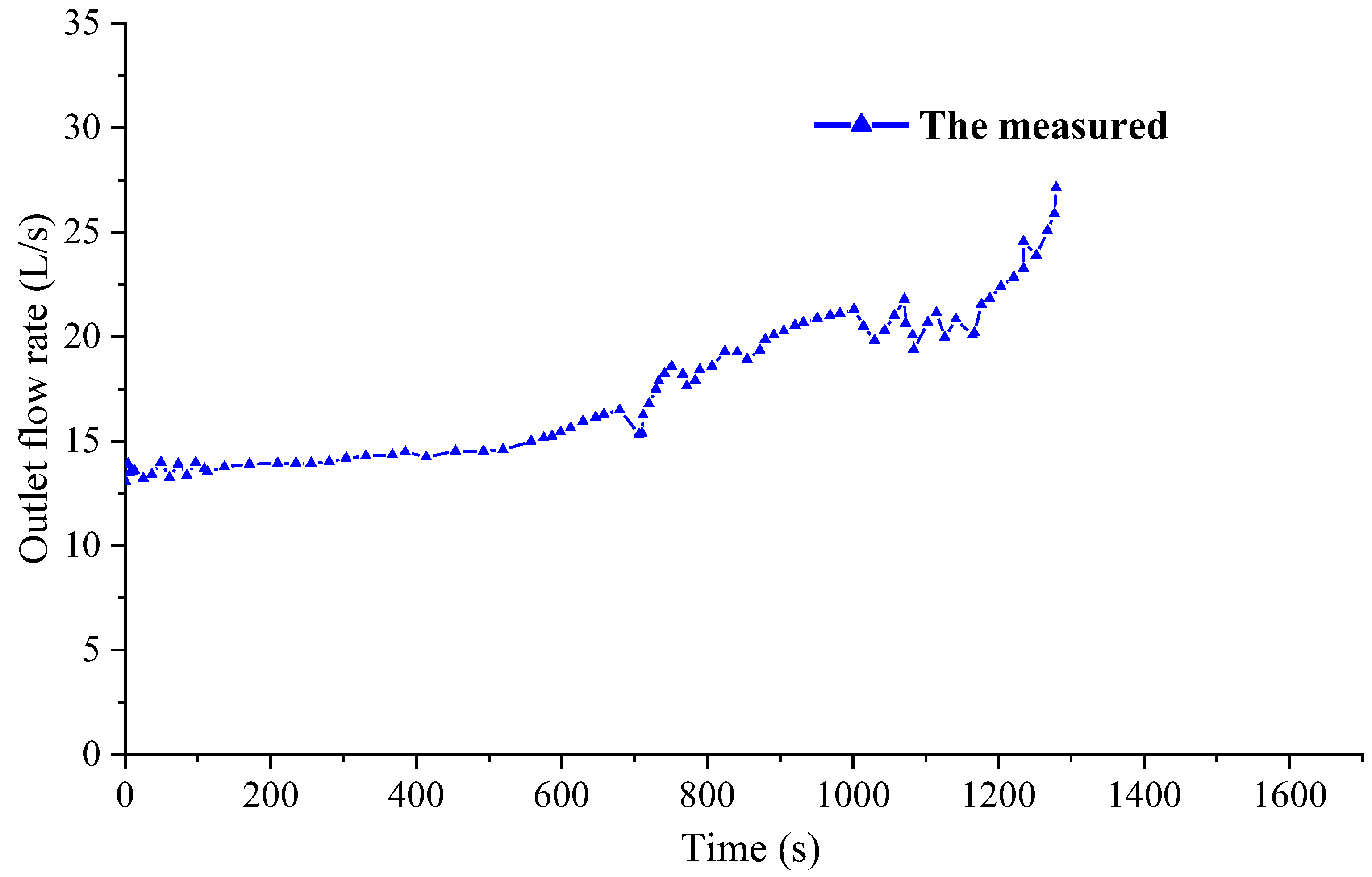
- The DTW algorithm is used to calculate the DTW distance between the measured outlet flow curve and the simulated curve, and the degree of similarity between them can be obtained. Then, the similarity between the curves is used to identify the type of gas kick. By using the feature, is it understood that the underbalanced pressure gas kick and gravity displacement gas kick present different characteristics on the outlet flow curve. With the increase of time series data, the judgment effect is better.
- (3)
- The method proposed in this paper can greatly reduce the identification time, and the dependence on drilling equipment is not high, which is not only suitable for managed pressure drilling but also for conventional drilling.
- (4)
- Using the dual drive of knowledge and data, can effectively improve the efficiency of the model identification. Field example simulations show that this method can identify the type of gas kick, based on real-time surface measurement parameters and provide a basis for taking targeted well control measures.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, S.; Yang, X.; Zhou, Y.; Li, H.; Wang, Y. Application of China-made precise managed pressure drilling equipment in the Tarim Basin. Nat. Gas Ind. 2012, 8, 6–10. [Google Scholar]
- Zhou, Y.; Liu, W. New progress on PCDS precise pressure management drilling technology. Pet. Drill. Tech. 2019, 47, 68–74. [Google Scholar]
- Shu, G.; Meng, Y.; Li, G.; Wei, N.; Zhao, X.; Yang, M. Mechanism of Mud Loss and Well Kick due to Gravity Displacement. Pet. Drill. Tech. 2011, 39, 6–11. [Google Scholar]
- Li, J.; Liu, G.; Zhou, L.; Tang, G.; Xu, Z.; Wang, T.; Kong, W. Gas-liquid gravity displacement experiment of fractured carbonate formation. Acta Pet. Sin. 2018, 39, 1186–1192. [Google Scholar]
- Dai, C.; Li, G.; Xiao, D.; Li, Y.; Lin, T.; Li, Z. Experiment and simulation of gravity displacement flow in fracture. Chin. J. Appl. Mech. 2020, 37, 195–199. [Google Scholar]
- Yang, S. Development and Application of Lab Simulation Devices for Visualized Gravity Displacement. China Pet. Mach. 2015, 43, 96–99. [Google Scholar]
- Tang, W.; Wang, C.; Jin, J.; Yang, F.; Xue, Y.; Chen, X.; Li, T.; Song, Z. Experimental Research on Dynamic Replacement of Asphalt and Drilling Fluid in Drilling Engineering. Sci. Technol. Eng. 2016, 16, 20–25. [Google Scholar]
- Zhao, X.; Meng, Y.; Hou, X.; Yang, S.; Bao, H.; Li, G. Pattern and control of gravity displacement between asphaltic heavy oil and drilling fluid. Oil Drill. Prod. Technol. 2016, 38, 622–627. [Google Scholar]
- Lu, B.; Zhao, X.; Xiao, D. Experimental study on gravity displacement mechanism of asphalt-drilling fluid on dimensional analysis. Drill. Prod. Technol. 2019, 42, 90–93. [Google Scholar]
- Xiao, D.; Meng, Y.; Zhao, X.; Li, G.; Xu, J. Liquid–liquid gravity displacement in a vertical fracture during drilling: Experimental study and mathematical model. Energy Explor. Exploit. 2020, 38, 533–554. [Google Scholar] [CrossRef]
- Zhang, X.; Zhou, Y.; Liu, W.; Guo, Q.; Cui, T. Characters of gravity replacement gas kick in carbonate formation. Acta Pet. Sin. 2014, 35, 958–962. [Google Scholar]
- Zhang, X.; Zhou, Y.; Liu, W. A method for characterization and identification of gas kicks caused by underbalanced pressure and gravity displacement. J. China Univ. Pet. 2015, 39, 95–102. [Google Scholar]
- Kong, X.; Lin, Y.; Qiu, Y. Research of mechanism for the gas invasion and gravity replacement in drilling operations. Chin. J. Appl. Mech. 2015, 32, 317–322. [Google Scholar]
- Xia, A.; Sun, B. Determination of the Type of Kick and Formation Information Based on Gas Kick Response Parameters. In Proceedings of the 2019 International Petroleum and Petrochemical Technology Conference, Beijing, China, 27–29 March 2019. [Google Scholar]
- Sakoe, H.; Chiba, S. Dynamic programming algorithm optimization for spoken word recognition. IEEE Trans. Acoust. Speech Signal Processing 1978, 26, 43–49. [Google Scholar] [CrossRef] [Green Version]
- Juang, B.H. On the hidden Markov model and dynamic time warping for speech recognition—A unified view. Bell Labs Tech. J. 1984, 63, 1213–1243. [Google Scholar] [CrossRef]
- Reyes, M.; Domínguez, G.; Escalera, S. Featureweighting in dynamic timewarping for gesture recognition in depth data. In Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 6–13 November 2011. [Google Scholar]
- Han, T.; Liu, X.; Tan, A. Fault diagnosis of rolling element bearings based on Multiscale Dynamic Time Warping. Measurement 2017, 95, 355–366. [Google Scholar] [CrossRef]
- Jun, B.H. Fault detection using dynamic time warping (DTW) algorithm and discriminant analysis for swine wastewater treatment. J. Hazard. Mater. 2011, 185, 262–268. [Google Scholar] [CrossRef]
- Forestier, G.; Lalys, F.; Riffaud, L.; Trelhu, B.; Jannin, P. Classification of surgical processes using dynamic time warping. J. Biomed. Inform. 2012, 45, 255–264. [Google Scholar] [CrossRef]
- Aach, J.; Church, G.M. Aligning gene expression time series with time warping algorithms. Bioinformatics 2001, 17, 495–508. [Google Scholar] [CrossRef] [Green Version]
- Wu, X.; Li, Q.; Yin, H.; Li, Z.; Jiang, J.; Si, M.; Zhang, Y. Real-Time Intelligent Recognition Method for Horizontal Well Marker Bed. Math. Probl. Eng. 2020, 1, 8583943. [Google Scholar] [CrossRef]
- Sun, B. Multiphase Flow in Oil and Gas Well Drilling; John Wiley & Sons: New York, NY, USA, 2016; pp. 75–90. [Google Scholar]
- Ding, S.; Zhang, Q.; Zhang, L.; Sun, L. Study on Classification of Ground Vehicles Based on Dynamic Time Warping. Fire Control. Command. Control. 2016, 41, 15–20. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Depth (m) | Bit Size (mm) | Casing Size (mm) |
|---|---|---|---|
| The 1st section | 350 | 660.4 | 508 |
| The 2nd section | 2200 | 444.5 | 365.13 |
| The 3rd section | 4616 | 333.38 | 273.05 |
| The 4th section (open hole) | 5740 | 241.3 | |
| BHA: 127 mm Drill pipe + 165.1 mm Drill collar + Non-magnetic Drill collar + Stabilizer + 203.2 mm Drill Collar + 241.3 mm PDC bit | |||
| Mud Weight (g/cm3) | φ3 | φ100 | φ300 | φ600 | Flow Rate (L/s) |
|---|---|---|---|---|---|
| 1.95 | 3 | 27 | 61 | 101 | 20 |
| Section | Depth (m) | Bit Size (mm) | Casing Size (mm) |
|---|---|---|---|
| The 1st section | 1500 | 406.4 | 273.05 |
| The 2nd section | 4953 | 241.3 | 200.3 |
| The 3rd section (open hole) | 6139.86 | 168.3 |
| Mud Weight (g/cm3) | ϕ300 | ϕ600 | Viscosity (mPa∙s) |
|---|---|---|---|
| 1.1 | 24 | 38 | 11 |
| Time Series | The Measured C | The Simulated A | The Simulated B |
|---|---|---|---|
| The measured C | 0 | 7.3 | 7.53 |
| The simulated A | 7.3 | 0 | 10.32 |
| The simulated B | 7.53 | 10.32 | 0 |
| Time Series | The Measured C | The Simulated A | The Simulated B |
|---|---|---|---|
| The measured C | 0 | 7.68 | 11.62 |
| The simulated A | 7.68 | 0 | 42.5 |
| The simulated B | 11.62 | 42.5 | 0 |
| Time Series | The Measured C | The Simulated A | The Simulated B |
|---|---|---|---|
| The measured C | 0 | 8.25 | 20.66 |
| The simulated A | 8.25 | 0 | 88.1 |
| The simulated B | 20.66 | 88.1 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yin, H.; Si, M.; Cui, H.; Li, Q.; Liu, W. Combining Knowledge and a Data Driven Method for Identifying the Gas Kick Type in a Fractured Formation. Appl. Sci. 2022, 12, 10912. https://doi.org/10.3390/app122110912
Yin H, Si M, Cui H, Li Q, Liu W. Combining Knowledge and a Data Driven Method for Identifying the Gas Kick Type in a Fractured Formation. Applied Sciences. 2022; 12(21):10912. https://doi.org/10.3390/app122110912
Chicago/Turabian StyleYin, Hu, Menghan Si, Hongwei Cui, Qian Li, and Wei Liu. 2022. "Combining Knowledge and a Data Driven Method for Identifying the Gas Kick Type in a Fractured Formation" Applied Sciences 12, no. 21: 10912. https://doi.org/10.3390/app122110912
APA StyleYin, H., Si, M., Cui, H., Li, Q., & Liu, W. (2022). Combining Knowledge and a Data Driven Method for Identifying the Gas Kick Type in a Fractured Formation. Applied Sciences, 12(21), 10912. https://doi.org/10.3390/app122110912