This section simulates examples and compares the performance of PL-MMSE, PLKF, BC-PLKF, IVKF and the corresponding algorithms with state constraints for moving targets under linear or nonlinear constraints with Gaussian mixture noise. To clarify, the combination algorithm of PL-MMSE and the mean square method is defined as PL-MMSE-C . Similarly, PL-MMSE combined with the estimation projection method is set to PL-MMSE-C . PL-MMSE incorporated with the linear approximation and second-order approximation methods are defined as PL-MMSE-L and PL-MMSE-S, respectively. Other constrained algorithms are named in the same way as above. Each simulation result is generated in Monte Carlo experiments with sampling time scans for each run.
5.3. Simulation Scenarios
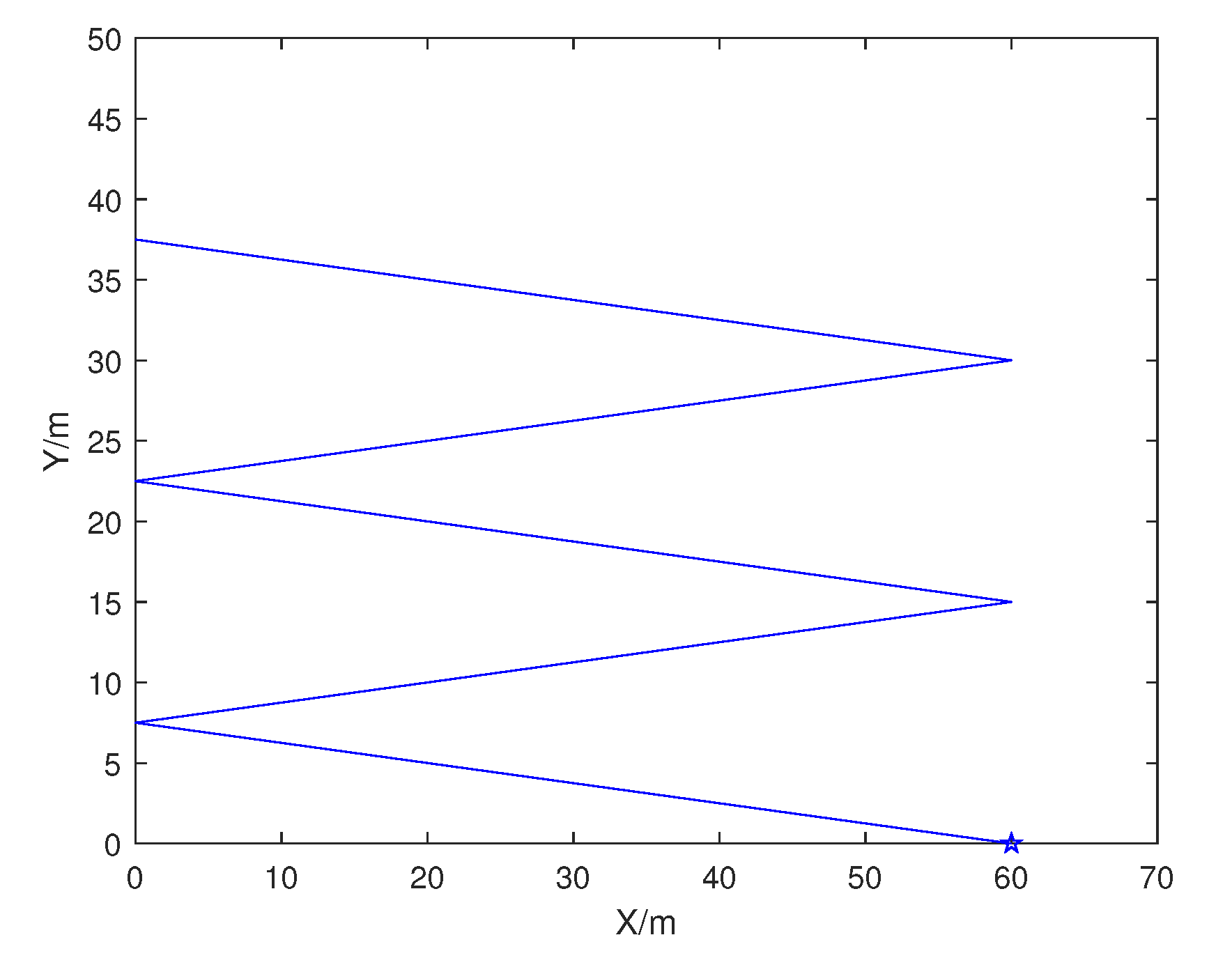
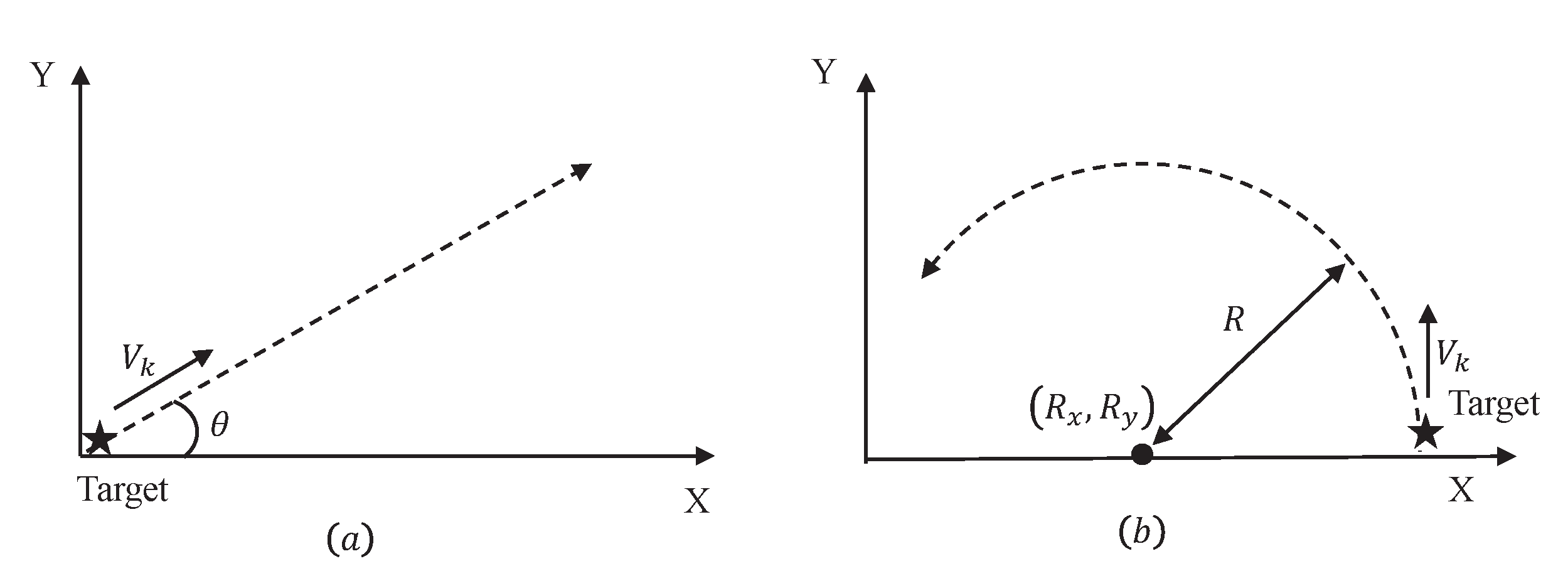
Designed algorithms are tested in two scenarios in this subsection. As can be observed in
Figure 3a, the target moves on a straight line in the first scenario while the target moves on an arc in the second scenario, as shown in
Figure 3b with nearly constant velocity magnitude
V.
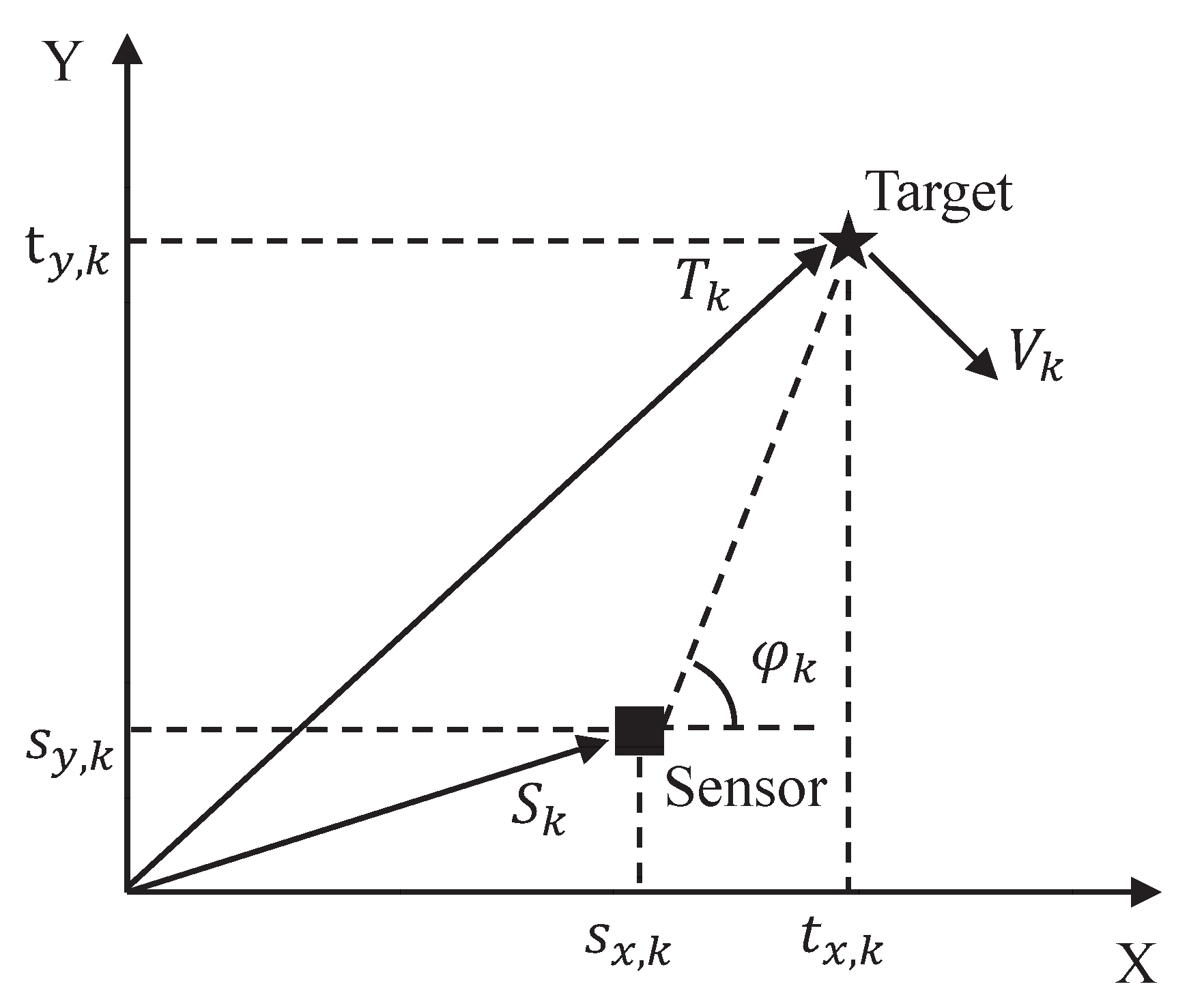
Under the known angle of the vehicle, the constrained matrix
G and the vector
g are governed by
The constrained estimate can be produced by setting
and
. In the simulation, the sampling interval T is set to 0.1 s. The total time span is the 20 s. The angle
is set to
. The velocity
V is set to 12 m/s. The target initial position is
m. The true initial state is set to
. The initial covariance matrix is
diag
. In addition, the covariances of process noise
and bearing noise
are given by
respectively, where
,
,
,
,
diag
,
diag
,
,
and
. The variable
controls the magnitude of bearing noise
. By setting
from 1 to 10 with the difference of 1,
Table 4 shows the standard deviation
of bearing noise for the corresponding
.
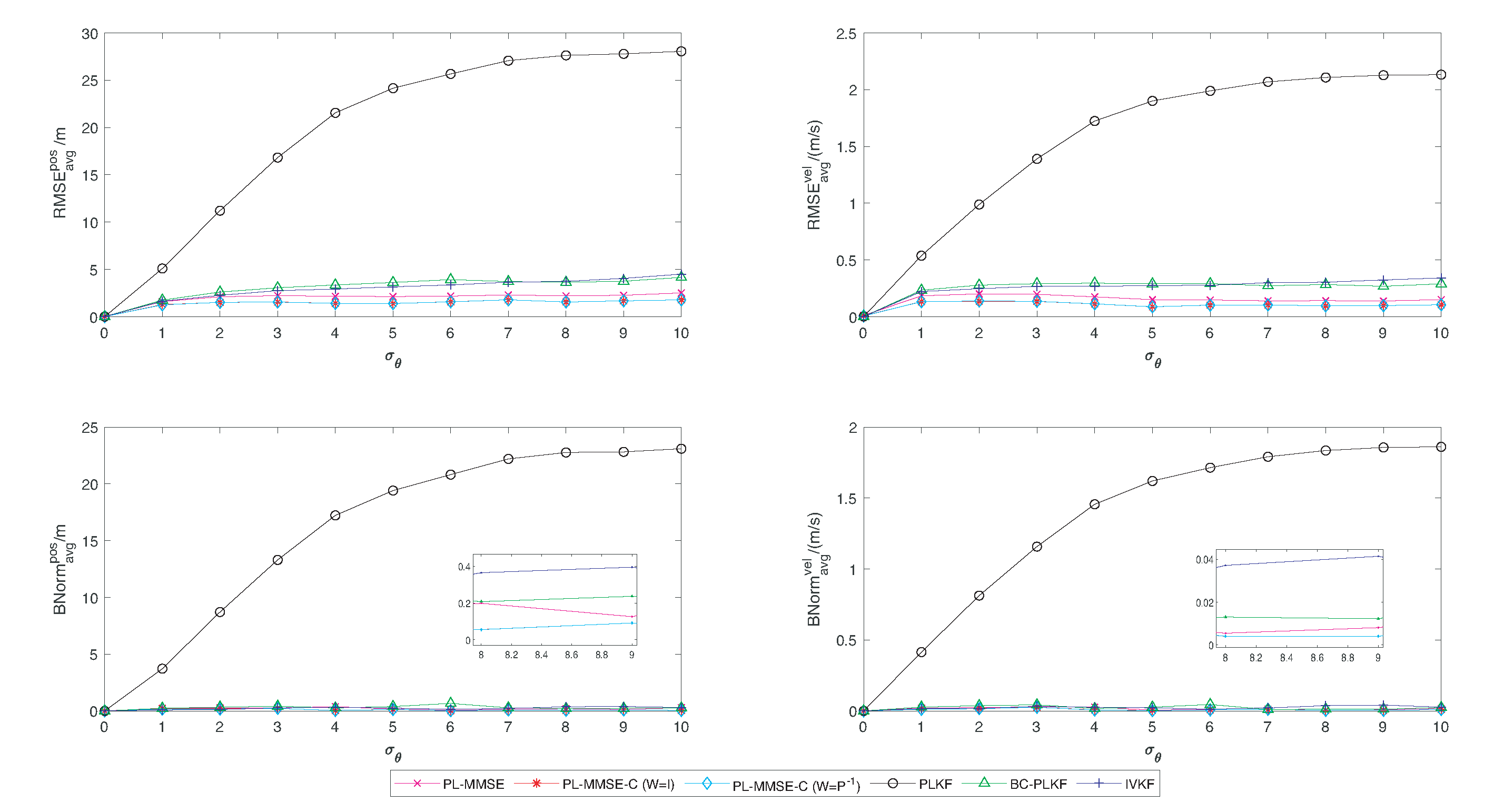
Simulation results of the mean RMSEs and BNorms of the target position and velocity estimates against
are presented in
Figure 4.
It is noticeable that the performance metric values of all algorithms increase and finally tend to be stable with
in
Figure 4, where the performance of PL-MMSE is always better than that of PLKF, BC-PLKF, and IVKF. The
of PL-MMSE is stable at
m at a large bearing noise level, which significantly outperforms other unconstrained algorithms. The evolution of RMSEs, BNorms of the target position and velocity estimates in time
(
) for
is shown in
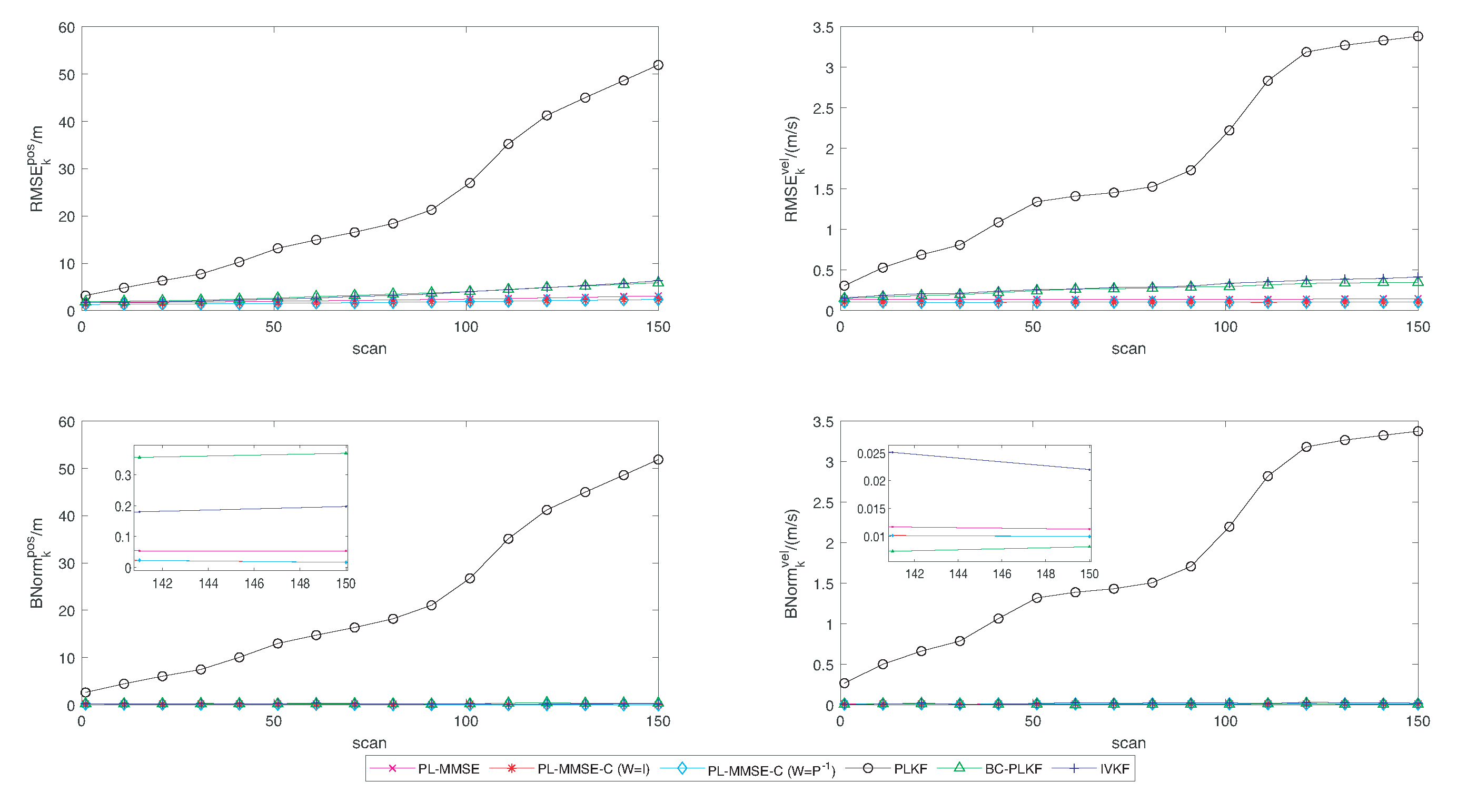
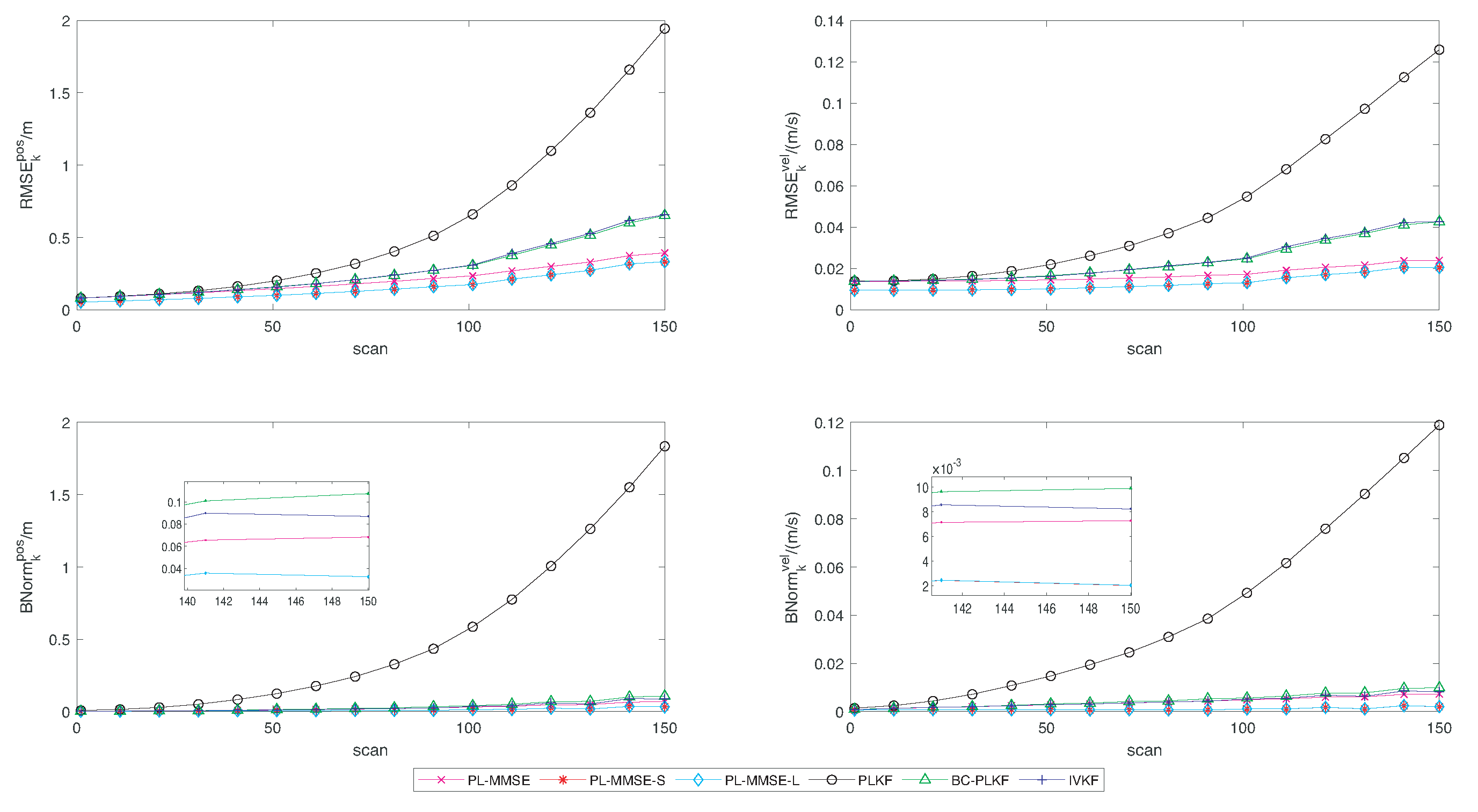
Figure 5.
The tracking performance of all algorithms gradually deteriorates with the rising scan under a large bearing noise level. The metric values of PL-MMSE gradually approach
m,
m/s,
m, and
m/s, which are remarkably lower than other unconstrained algorithms. It can also be observed that the constrained PL-MMSE is superior to the unconstrained PL-MMSE at all bearing noise levels in
Figure 4 and
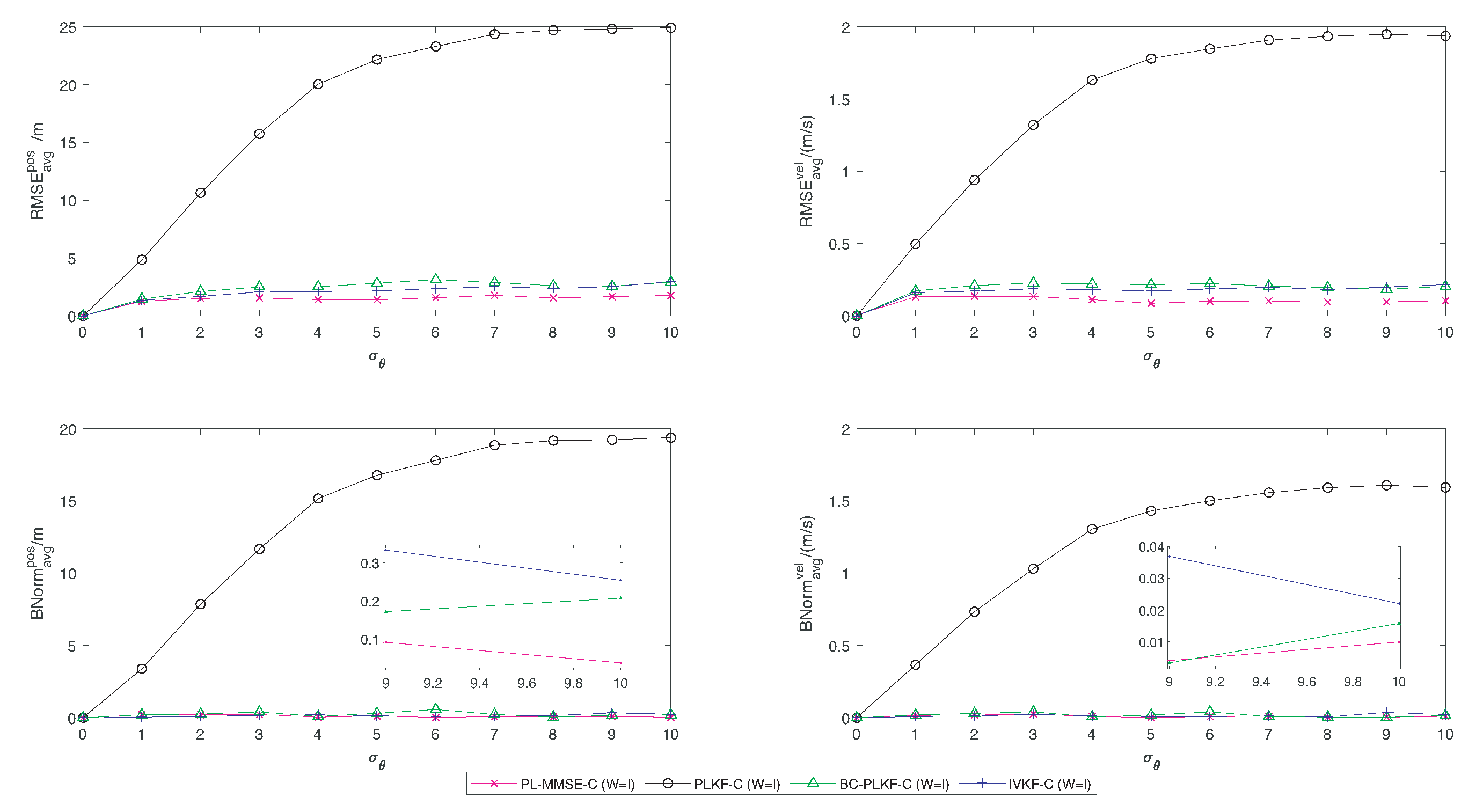
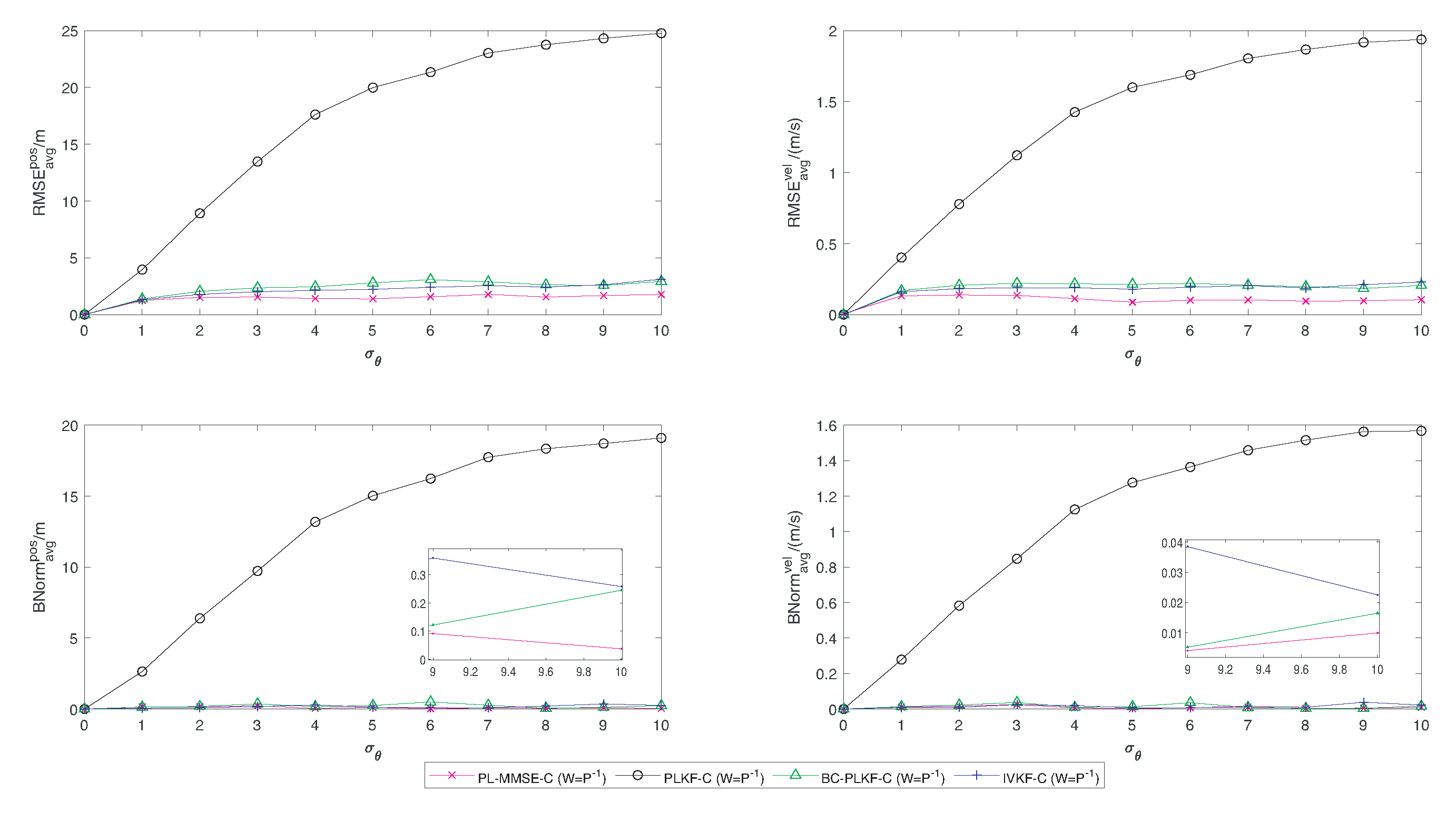
Figure 5, which indicates the constrained algorithm has a better robustness and tracking performance. Comparisons of four algorithms combined with the mean square method and the estimation projection method for
are presented in
Figure 6 and
Figure 7, respectively, which demonstrate that PL-MMSE-C
and PL-MMSE-C
have less errors than other corresponding constrained algorithms at a large bearing noise level.
Table 5 shows the mean RMSEs and BNorms of different filters for
.
The RMSE performance of PL-MMSE-C
is
m and
m/s at large bearing noise level
, which are less than other constrained algorithms. Similarly, the BNorm performance of PL-MMSE-C
has
m and
m/s at large bearing noise level
which are better than the others. The numerical results of PL-MMSE-C
are similar to that of PL-MMSE-C
, as observed from the table. The filters combined with constraints can achieve better performance from
Figure 6 and
Figure 7 and
Table 5. As shown in
Table 5, the constraint algorithms with
are not necessarily better than the corresponding filters with
, where
m of IVKF-C
is less than
m of IVKF-C
and
m of BC-PLKF-C
is greater than
m of BC-PLKF-C
. This difference is caused by the discrepancy between the actual distribution characteristics of the state estimate
and
P. When the distribution is close to
P, the constraint algorithms with
behave better than the corresponding constraint algorithms with
.
In the second scenario, the target moves on an arc, as shown in
Figure 3b, with a nearly constant velocity magnitude
V. The turning center is
with the radius
R. Hence, the constrained equation
, the vector
g, the constrained matrix
M, the vector
m and the variable
, are given by
In addition, the velocity constraint is introduced into the state estimation. The constrained velocity estimate
is
where the unconstrained velocity estimate
and constrained unit direction vector
are
with
.
In the simulation, the sampling interval T is set to 0.1 s. The total time scan is the 20 s. The turning center is set to m. The turning radius R is 100 m. The initial position for the target is m. To compare the linear approximation with the second-order approximation method, two experiments are carried out, where the magnitude of V is m/s and m/s, respectively.
For
m/s, the true initial state is
. The initial covariance matrix is
diag
. The process noise
and bearing noise
have the same composition as (
74) and (75) where
,
,
,
diag
,
diag
,
,
and
. The standard deviation
of bearing noise for the corresponding
is set as shown in
Table 6.
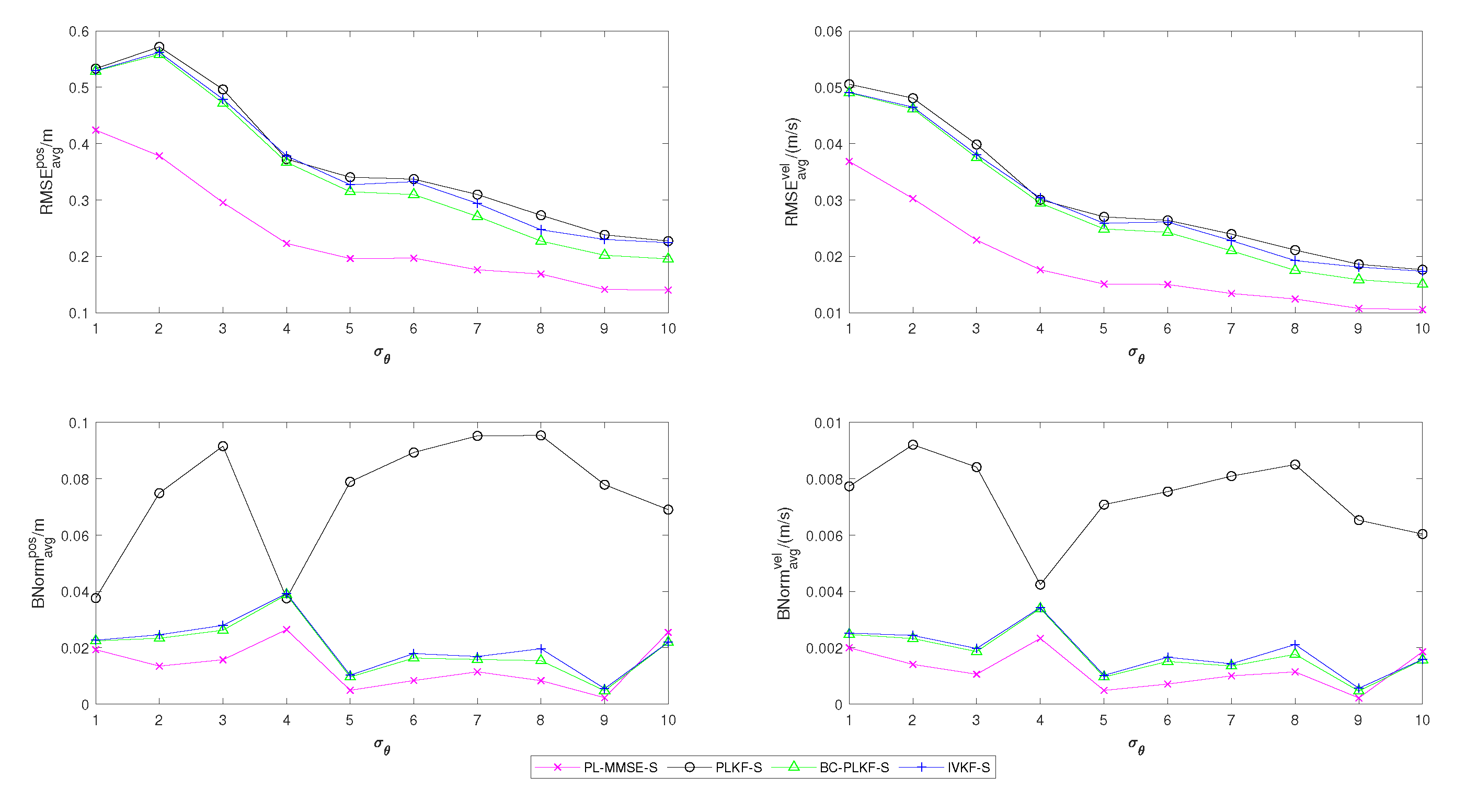
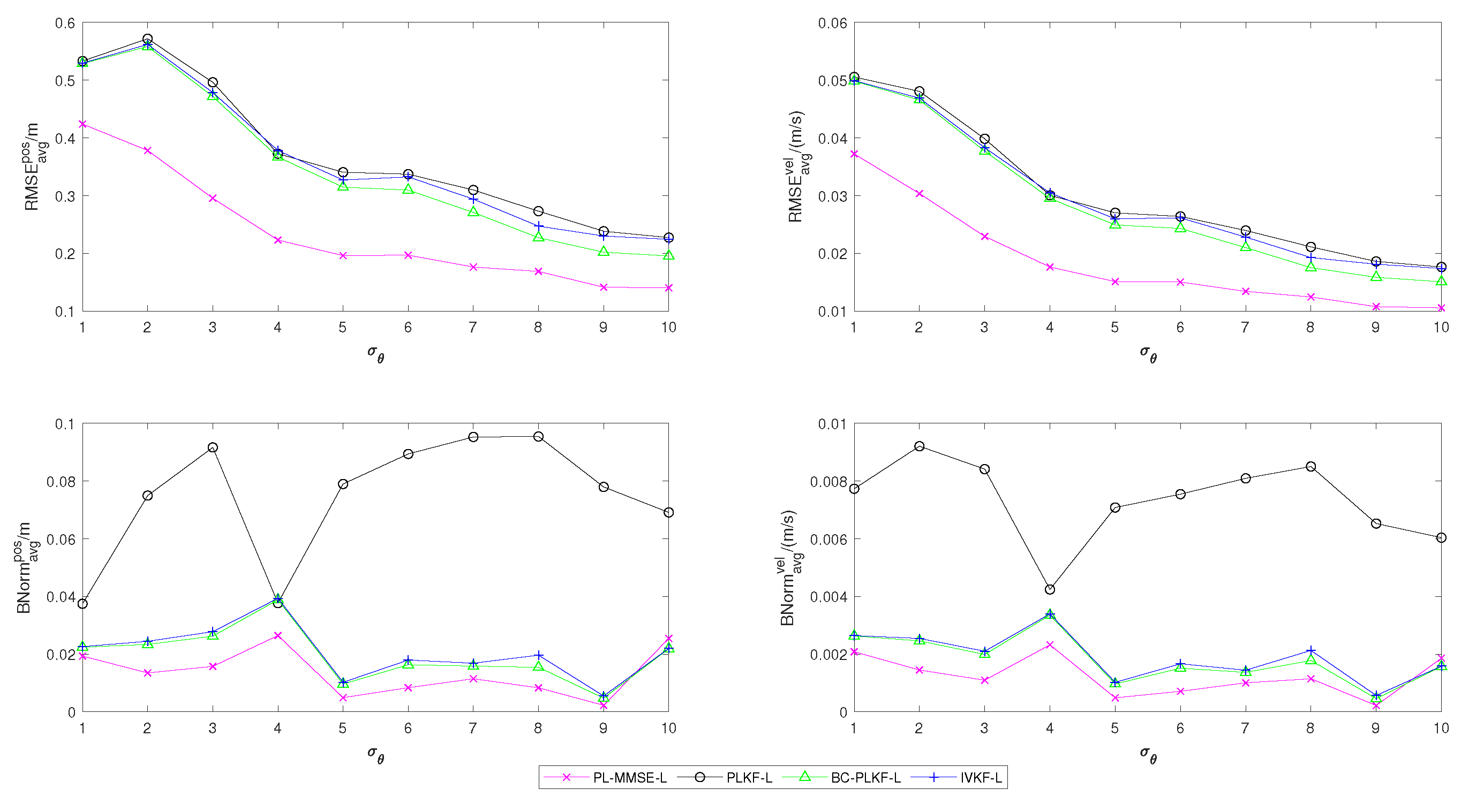
Simulation results of the time-averaged RMSEs and BNorms of the target position and velocity estimates and the bearing noise standard deviations is shown in
Figure 8 where PL-MMSE has lower errors in the RMSE performance with
m,
m/s.
The evolution of RMSEs, BNorms of the target position and velocity estimates in time
for
at
m/s is presented in
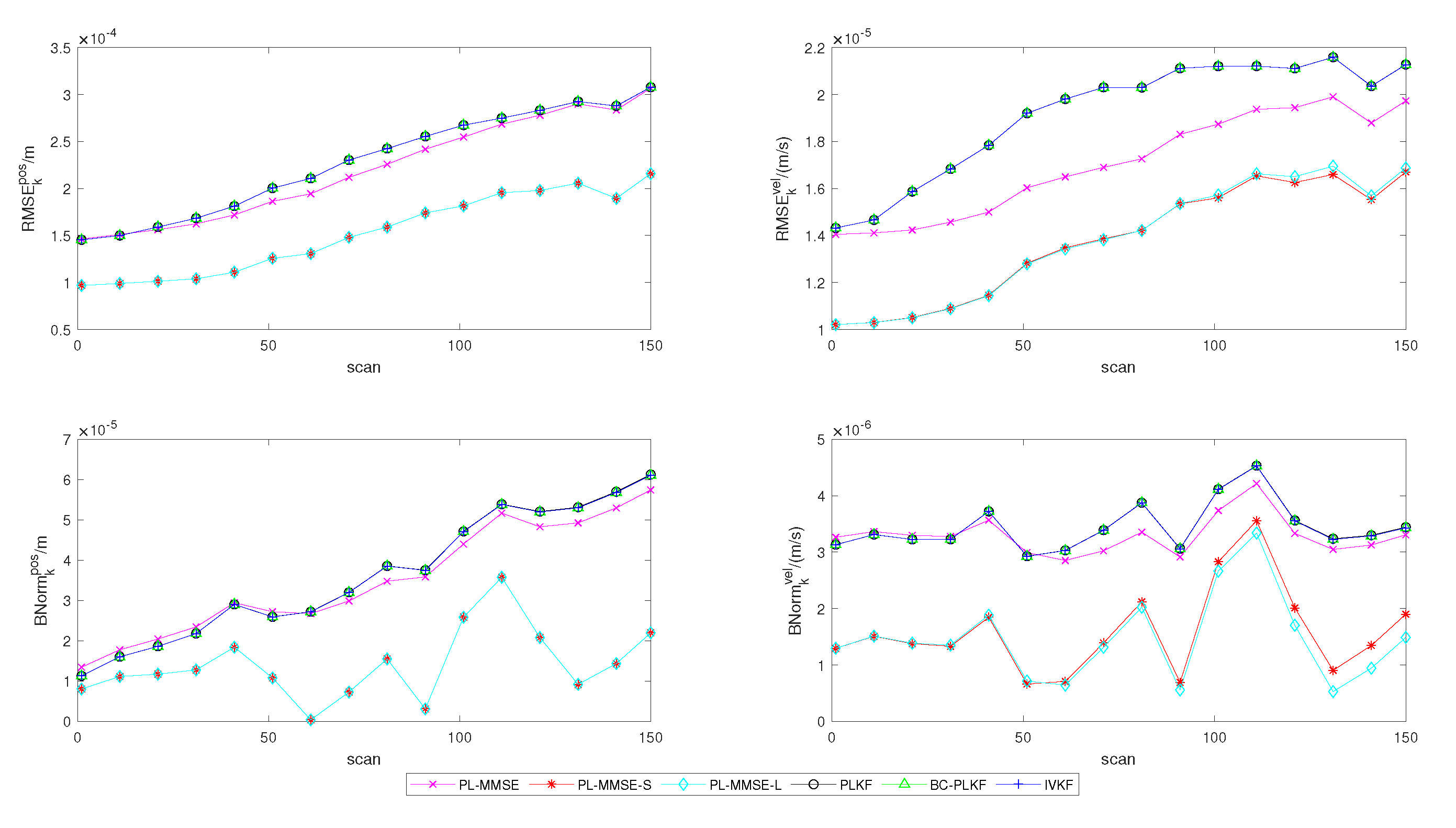
Figure 9.
It is noticeable that the curve trends in
Figure 8 and
Figure 9 are similar to
Figure 4 and
Figure 5 because of the weak model nonlinearity caused by small velocity. The performance metric values of PL-MMSE gradually approach
m,
m/s,
m and
m/s, which are superior to other unconstrained algorithms in
Figure 9. It is also demonstrated that the constrained PL-MMSE is better than the unconstrained PL-MMSE and other constrained filters at all bearing noise levels under the arc section in
Figure 8 and
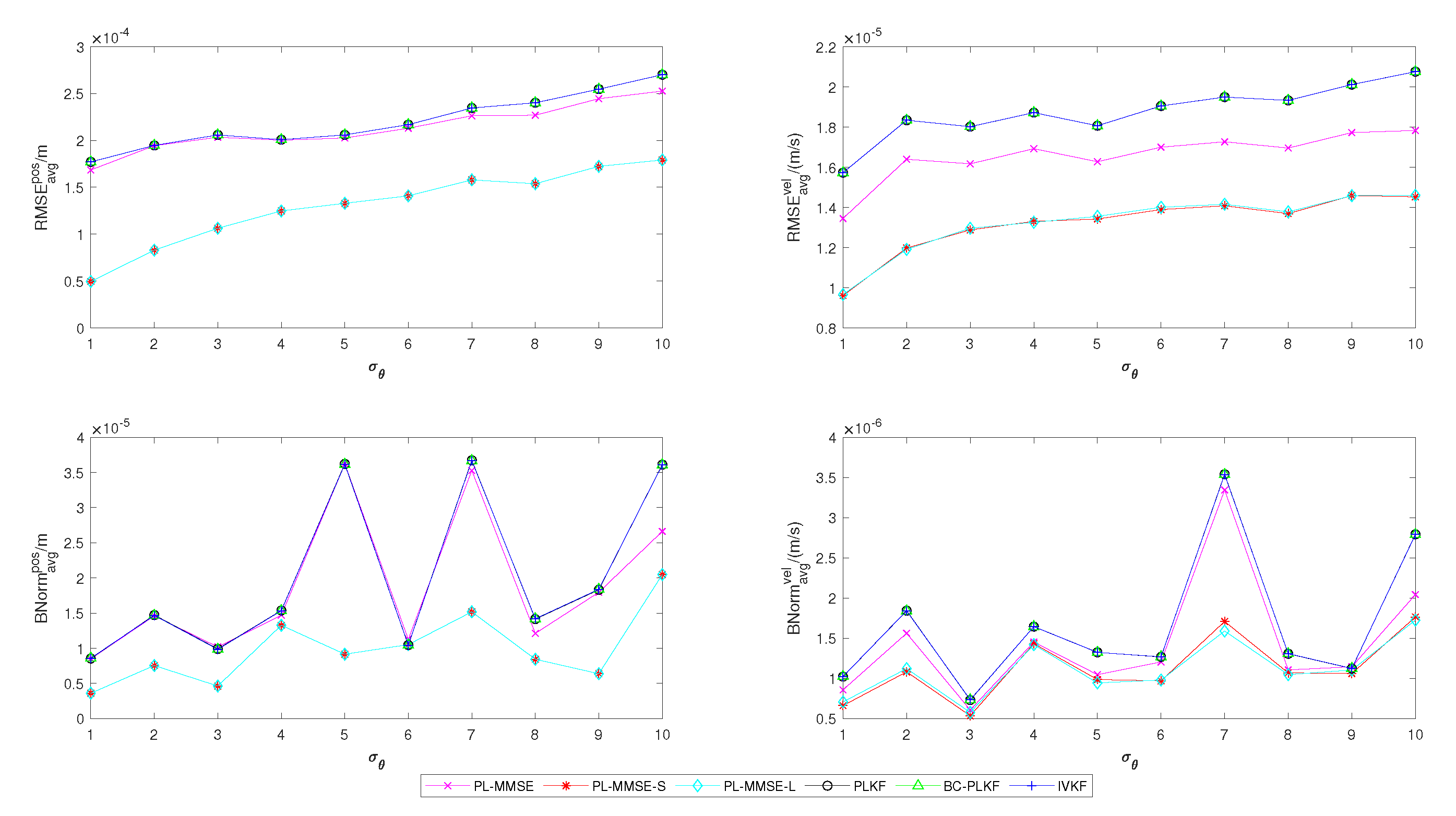
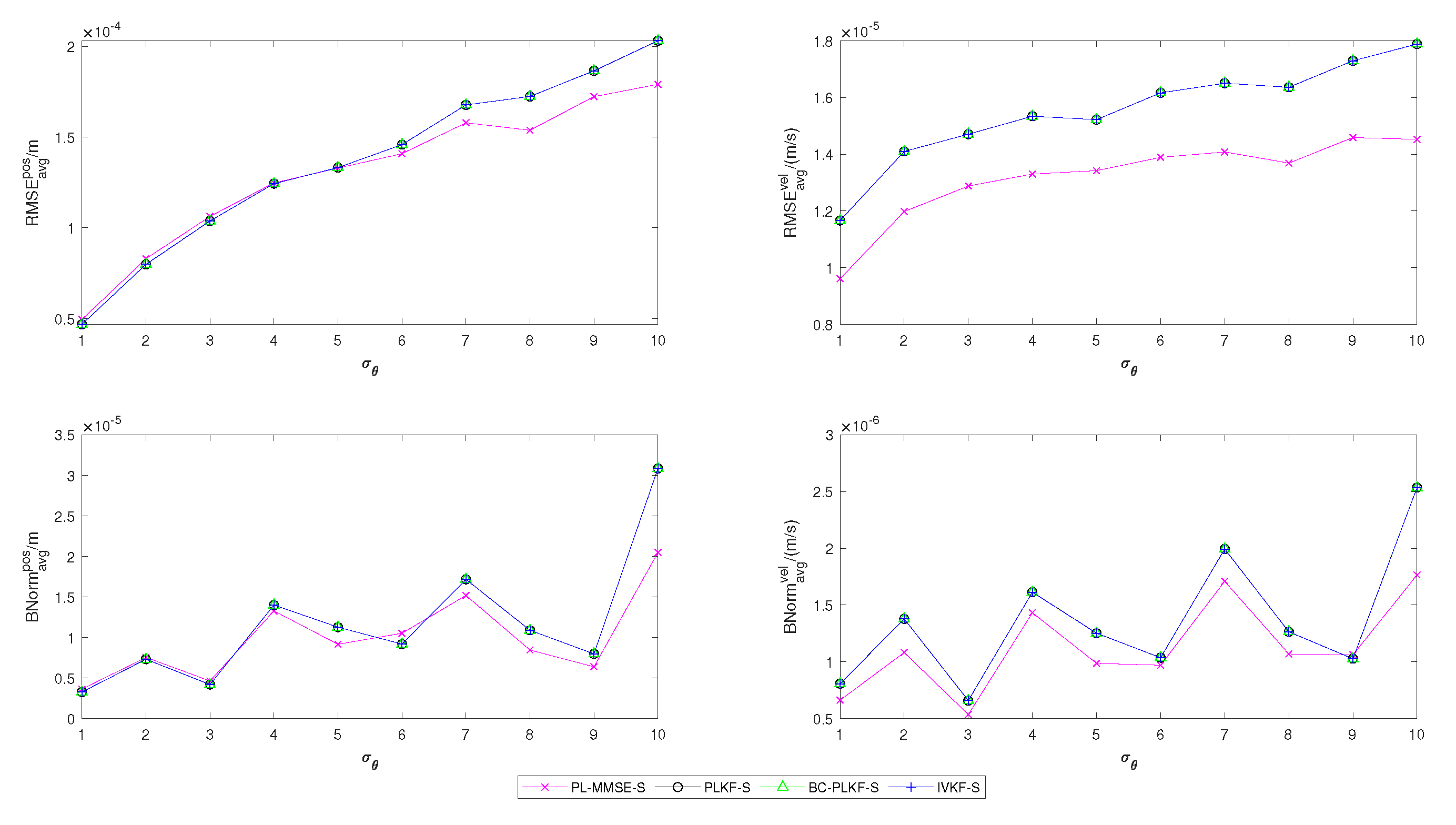
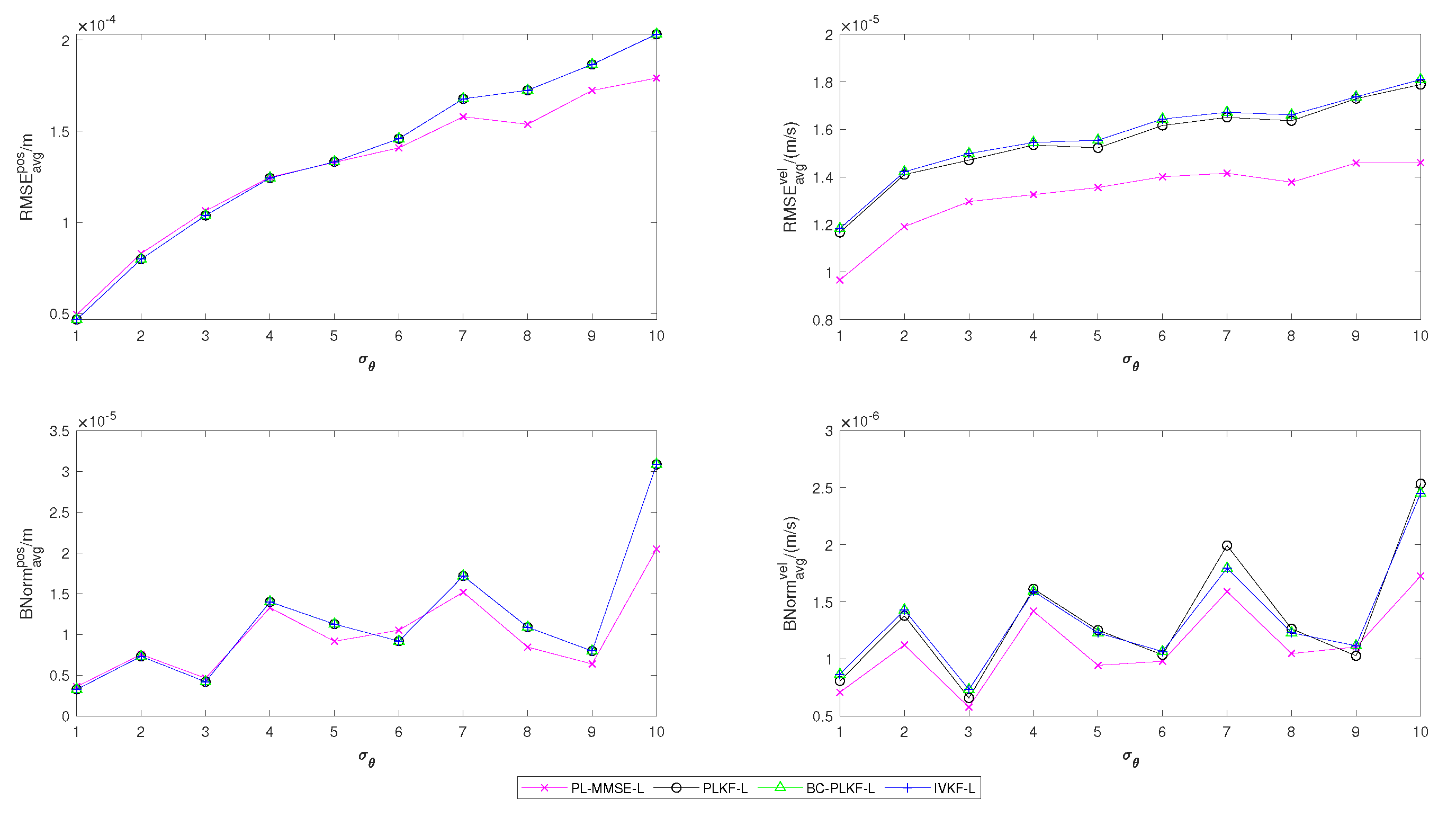
Figure 9. Performance comparisons of four algorithms combined with the linear approximation method and the second-order approximation method for
at
m/s are shown in
Figure 10 and
Figure 11, respectively, which present that PL-MMSE-L and PL-MMSE-S have fewer errors than other constrained algorithms at a large bearing noise level.
Table 7 presents the results of the time-averaged RMSEs and BNorms of different filters for
at
m/s. The RMSE and BNorm performance of PL-MMSE-L are
m,
m/s,
m and
m/s. The PL-MMSE algorithm combined with the linear approximation method is better than the second-order approximation method as
m/s of the PL-MMSE-S is greater than
m/s of the PL-MMSE-L in
Table 7 due to the weak nonlinearity.
For
m/s, we have the true initial state
and the initial covariance matrix
diag
. The composition of the process noise
, and the bearing noise
is the same as (
74) and (75), where
,
,
,
,
diag
,
diag
,
,
and
.
Table 8 presents the standard deviation
of the bearing noise for the corresponding
.
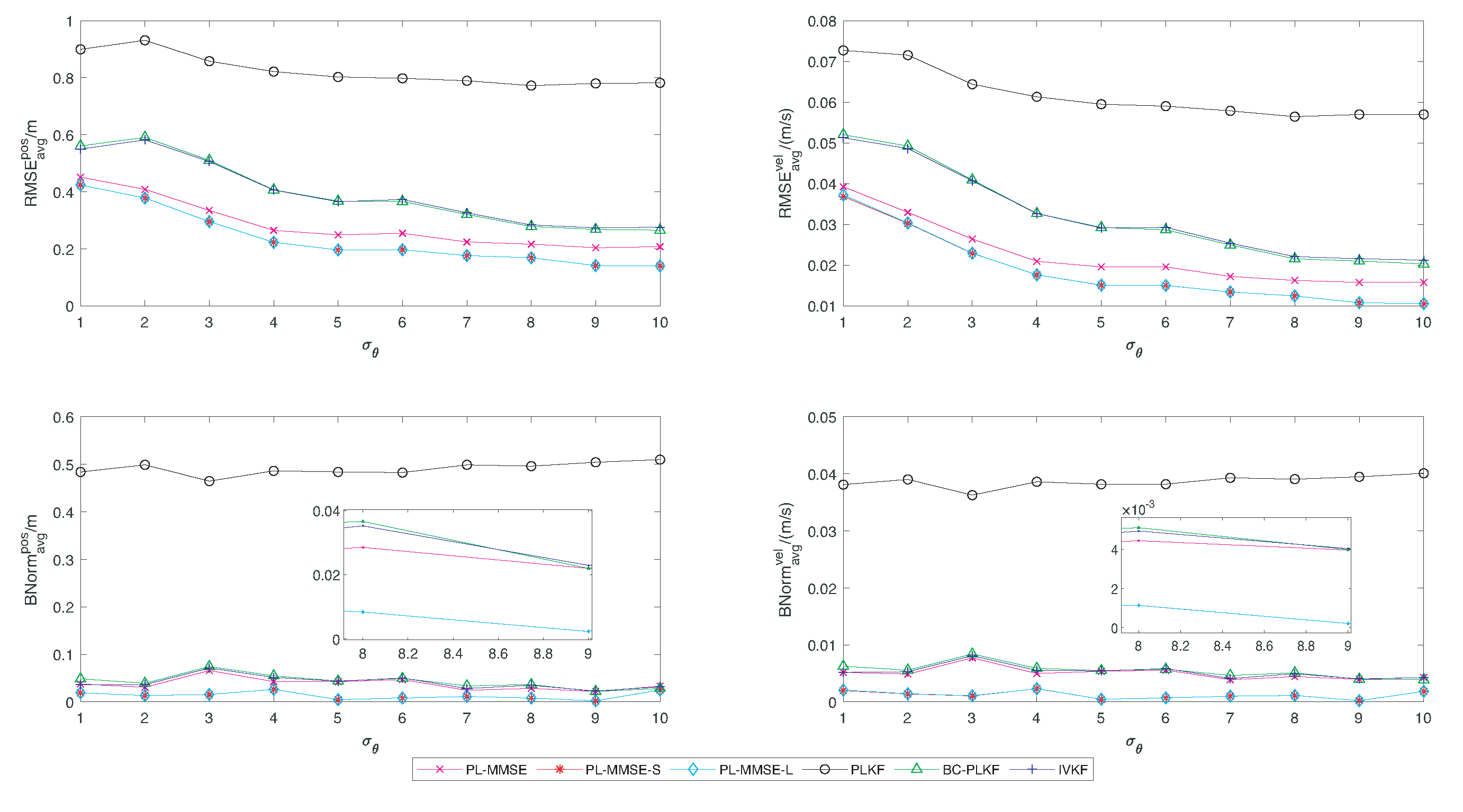
Simulation results of the time-averaged RMSEs and BNorms of the target position and velocity estimates against
are presented in
Figure 12.
The performance of PL-MMSE and PL-MMSE with constraints is better than other filters, where
m of PL-MMSE and
m of PL-MMSE-S are less than other algorithms for
. The evolution of RMSEs, BNorms of the target position and velocity estimates in time
for
at
m/s is shown in
Figure 13.
It is evident that the constrained PL-MMSE has more stable and accurate tracking performance at large bearing noise levels under the arc section. Comparisons of four algorithms combined with the linear approximation method and the second-order approximation method for
at
m/s are provided in
Figure 14 and
Figure 15, respectively. The time-averaged RMSEs and BNorms of different filters for
are presented in
Table 9. It is remarkable that the PL-MMSE with constraints has less errors than other filters, where
of PL-MMSE-L is 0.176 m and
of PL-MMSE-S is 0.176 m. On contrary to the first experiment with
m/s, the algorithms combined with the second-order approximation method perform better than the algorithms combined with the linear approximation method in
Table 9, where
of PL-MMSE-S is less than
of PL-MMSE-L for
at the scale of
because of strong nonlinearity.
It is worthwhile to point out that the errors of the filters are basically unchanged and slightly decrease as the noise level rises in
Figure 12 when the velocity is relatively large. The cause of this phenomenon is the error in the state update equation introduced by the linearization of the arc movement. When
m/s, the error from the state update equation becomes the main source of the filter estimate error, which relatively reduces the effect of the bearing noise and breaks the average algorithm performance trend.
Remark 2. It is noticeable that the magnitudes of the velocity in the second scenario are both small. There are two reasons for such a setting. Firstly, the PL-MMSE is still a linear Kalman filter under linear and nonlinear constraints. There is discrepancy between the TMA result from the linear motion model (9) and the actual arc trajectory in the circular section. The faster the target moves in an interval, the greater the discrepancy will be. Secondly, the sampling frequency of the sensor in reality is much higher than that in our experiment. For example, the sampling frequency of the radar is generally between 1 and 15 GHz. When the sampling frequency increases, the relative speed of the target also rises up proportionally to maintain the same traveling distance. Hence, if we set the sampling time s rather than s as in the simulation, the relative speed of the target becomes m/s and 2000 m/s, respectively, which are quite common in practice. The transformation of the sampling frequency and target velocity corresponding to a real radar demonstrates that the setting is meaningful.
Since the distance the target moves in an interval is small, the corresponding RMSEs are low. Nevertheless, simulation results show that the RMSEs of our constrained algorithms are much smaller than those of other filters.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}