1. Introduction
Energy conservation and emission reduction have become a global development consensus [
1,
2]. Construction machinery is widely used, but it has the shortcomings of low energy efficiency and poor emissions [
3]. Taking the traditional 20 t excavator as an example, the energy efficiency of the power system and the hydraulic system are only about 35% [
4]. It is urgent to carry out research on energy conservation and emission reduction technologies for construction machinery [
5,
6].
At present, energy-saving research is mainly focus on the power system and the hydraulic system [
7]. The research on power system energy-saving technologies can be divided into energy-saving technologies based on the traditional engine, hybrid power technologies and pure electric technologies. The energy-saving technology based on the traditional engine mainly improves the fuel injection characteristics of the engine through electronic control, so as to improve the diesel combustion efficiency. While, energy-saving technologies based on the traditional engine can be further divided into working condition division control, automatic idle control, constant power control [
8,
9,
10] and cylinder deactivation control [
11]. However, due to the bottleneck of engine development, it is difficult to further improve the energy efficiency. The hybrid power system mainly uses the auxiliary power source to drive the load together with the engine and stabilize the engine working point, to improve the energy efficiency of the engine. However, the configuration and control of the hybrid power system are complicated. Moreover, the engine is employed in hybrid power technologies. The improvement in energy efficiency and emission are still unsatisfactory [
12,
13]. Electric construction machinery uses a motor to replace the engine, in which high energy efficiency and zero emission can be achieved. It is considered to be one of the important trends in the development of construction machinery [
14,
15,
16].
At present, some research has been carried out on electric construction machinery. Some machine manufacturers, including Komatsu, Doosan, Sunward, XCMG, SANY, Liebherr, and Caterpillar, have launched electric construction machinery. However, the electrification technology for construction machinery is still in its infancy. Most electric construction machineries use motors to replace engines and simulate the working mode of engines. The working characteristics of the hydraulic system are not fully considered, which leads to the limited comprehensive matching characteristics of the motor and hydraulic system. At present, many scholars have carried out research on the electrification of construction machinery.
Quan et al. used a variable speed motor to drive the pump in a hydraulic system for flow matching. The energy consumption of the power system was reduced from 2.05 to 0.7 kW. The energy-saving efficiency was up to 33%. Compared with traditional excavators, the energy consumption of the whole machine could be saved by more than 30% [
17,
18]. Lin et al. used a motor to replace the engine and proposed a two-stage idle speed control system for an electric excavator with an accumulator [
19]. The results showed that the fast response during mode switching could be realized. Moreover, the energy-saving efficiency of the system was about 36.06% [
20]. Yoon et al. carried out research on the electric excavator based on the electro-hydraulic actuator. The integrations of driving and regeneration for the potential energy and the kinetic energy of the excavator boom and swing were achieved, respectively. A 5 t excavator test prototype was developed [
21]. Similar research was carried out by Minav et al. as well. Three independent motor pumps were used for the boom, arm, and bucket of a 1 t excavator. The results showed that in the selected typical working condition, the efficiency of the system was 71.3% [
22].
At present, electrification technologies have been widely used in the field of automobile, but their applications to construction machinery are still in their infancy. Because of significant differences between construction machinery and automobile in structure, working condition, load and working environment, the research on electrification technology of construction machinery needs to be reconsidered.
Based on the LUDV system, to give full play to the excellent speed regulation characteristics of the motor, the research on the flow matching technology through variable speed motor-variable displacement pump for excavator is studied. Meanwhile, the flow prediction for multi-actuators pilot signals is realized, so as to further improve the system efficiency and the controllability.
2. Preliminary Consideration
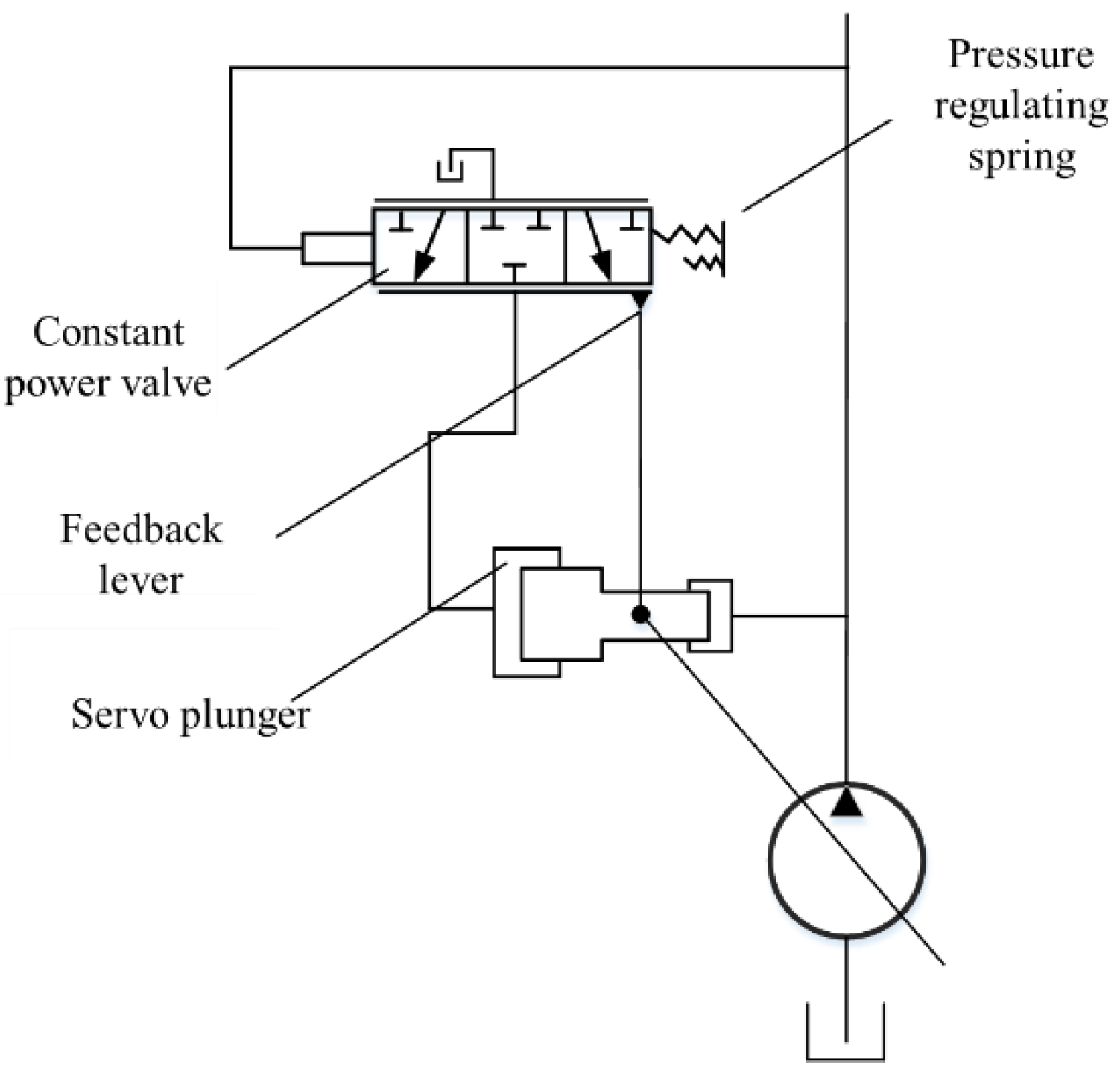
In the traditional excavator based on engine, the speed of engine is preset and fixed during operation. To match the operation requirements of different working conditions and improve the absorption rate of the hydraulic pump from the engine output power, the constant power control is employed to limit the hydraulic system output power and match the output power of power source. The constant power control is adjusted through the displacement regulation mechanism of pump. The structural principle diagram of the constant power regulation system is given in
Figure 1.
The constant power valve is a three-position and three-way directional valve. The valve sleeve is connected with the piston of the pump displacement variable mechanism. The left end of the constant pressure valve core is connected with the pump outlet pressure signal Pp. Two springs are equipped at the right end, with lengths of L1 and L2, respectively, where L1 > L2 and elastic coefficients are k1 and k2, respectively. The initial state of spring 1 is compressed. The initial set pressure of spring 1 is P1. The spring 2 is naturally extended without pressure.
When Pp < P1, the constant power valve spool moves to the left. The constant power valve works in the right position. The oil chamber at the left end of the variable piston returns to the oil tank. The variable piston moves to the left. The variable pump works at the maximum displacement.
When Pp = P1, the constant power valve works in the middle position. The oil chamber at the left end of the variable piston is closed. The piston displacement remains unchanged, and the variable pump still works at the maximum displacement.
When
Pp >
P1, the constant power valve core moves to the right. The constant power valve works in the left position. The oil chamber at the left end of the variable piston is connected to the pump outlet. Suppose the left end cross-sectional area of the variable piston is
S1 and the right end cross-sectional area of the variable piston is
S2, and
S1 >
S2. The forces on the left and right ends of the variable piston can be expressed as
where
T1 is the force of the variable piston left end.
T2 is the force of the variable piston right end.
Pp is the output pressure of the pump.
S1 is the left end cross-sectional area.
S2 is the right end cross-sectional area.
The variable displacement piston moves to the right to reduce the displacement of the pump. Meanwhile, the variable piston moving to the right drives the constant power valve sleeve to the right through the connecting rod so that the constant power valve works in the middle position again. The variable pump maintains the current displacement. The compression displacement of spring 1 is ∆
x1, and the cross-sectional area of the left end of the valve core is
S3. At this time, the balance formula of the constant power valve core can be given as
where
S3 is the area of the left end of the constant power valve core.
P1 is the initial set pressure of spring 1.
k1 is the elastic coefficients of spring 1. ∆
x1 is the compression displacement of spring 1.
When the load pressure continues to rise, causing the rise of pump outlet pressure
Pp. The constant power valve continues to repeat the above steps. The displacement of the variable pump decreases with the increase in the pump outlet pressure until the valve core of the constant power valve contacts the spring 2. The compression displacement of spring 2 is ∆
x2. At this time, spring 1 and spring 2 act together on the right side of the constant power valve spool. The elastic coefficient of these two springs is
k1 +
k2. The above changes continually with the pump outlet pressure at the left end of the constant power valve spool. The displacement of the variable pump decreases with the increase in the pump outlet pressure. At this time, the balance formula of the spool can be deduced as
where
k2 is the elastic coefficients of spring 2. ∆
x2 is the compression displacement of spring 2.
Until the displacement of variable displacement pump is adjusted to the minimum displacement. Because the pump displacement changes with the pump outlet pressure, the constant power valve spool works in the process from one spring to two springs, and the spring elasticity coefficient changes, which affects the slope of the pump displacement changing with the pump outlet pressure. When the input speed of the pump is constant. The variation curve of the pump outlet flow with the pump outlet pressure is shown in
Figure 2.
As can be seen, the approximate constant power control is realized by changing the spring stiffness. The pump enters the constant power mode from point
A. The pressure at point
A depends on the starting pressure set by the spring 1. Starting from point
B, the constant power enters the second stage, which is adjusted by the springs 1 and 2. The fitting curve of approximate constant power can be obtained by the joint action of two springs. After entering the constant power point of the pump, the displacement of the variable pump varies linearly with the displacement of the valve core of the constant power valve, which can be expressed as
where ∆
V is the variation of the displacement of the pump.
λ is the scale factor. ∆
x is the displacement of the valve core of the constant pressure valve.
When the pump operates in the section
AB, the flow of the pump can be given as
where
Q is the output flow of the pump.
Qmax is the maximum flow of the pump. Δ
Q is the reduced flow of the pump due to the reduction in displacement of the pump.
Vmax is the maximum displacement of the pump. Δ
V is the reduction in displacement of the pump.
n is the speed of the pump.
Combined Equations (2) and (5), the relationship between outlet flow
Q and pressure
Pp of the pump in section AB can be deduced as
The constant value in Equation (6) is defined as
Combined Equations (6) and (7), the relationship between outlet flow
Q and pressure
Pp of pump in section AB can be re-expressed as
Through Equation (6), when the hydraulic pump enters the AB stage of constant power operation of the pump from point A, the pump outlet flow Q has a negative linear relationship with the pressure Pp, and the slope is −K1.
In the section
BC, the displacement of the core valve of the constant pressure valve is ∆x
1. The further movement displacement of the core valve of the constant pressure valve is ∆x
2. Combine Equation (4), the outlet flow of the pump can be given as
Combine Equations (3) and (5), the relationship between outlet flow
Q and pressure
Pp of pump in section
AB can be deduced as
The constant value in Equation (10) is defined as
Combined Equations (10) and (11), the relationship between outlet flow
Q and pressure
Pp of pump in section
AB can be re-expressed as
According to Equation (12), when the hydraulic pump enters the BC stage of constant power operation of the pump from point B, the pump outlet flow Q has a negative linear relationship with the pressure Pp, and the slope is −K2. Because |K1| > |K2|, the curve of section AB has a greater inclination than that of section BC.
Therefore, the constant power valve is fed back through the pump outlet pressure and compared with the starting pressure set by the spring at the right end of the constant power valve spool to determine the initial system pressure of the variable pump entering the constant power operation stage. By connecting the constant power valve sleeve with the variable piston of the variable pump, balancing the spring force with the pump outlet pressure, and cooperating with the spring variable stiffness structure, the approximate constant power control can be realized.
5. Simulation Research
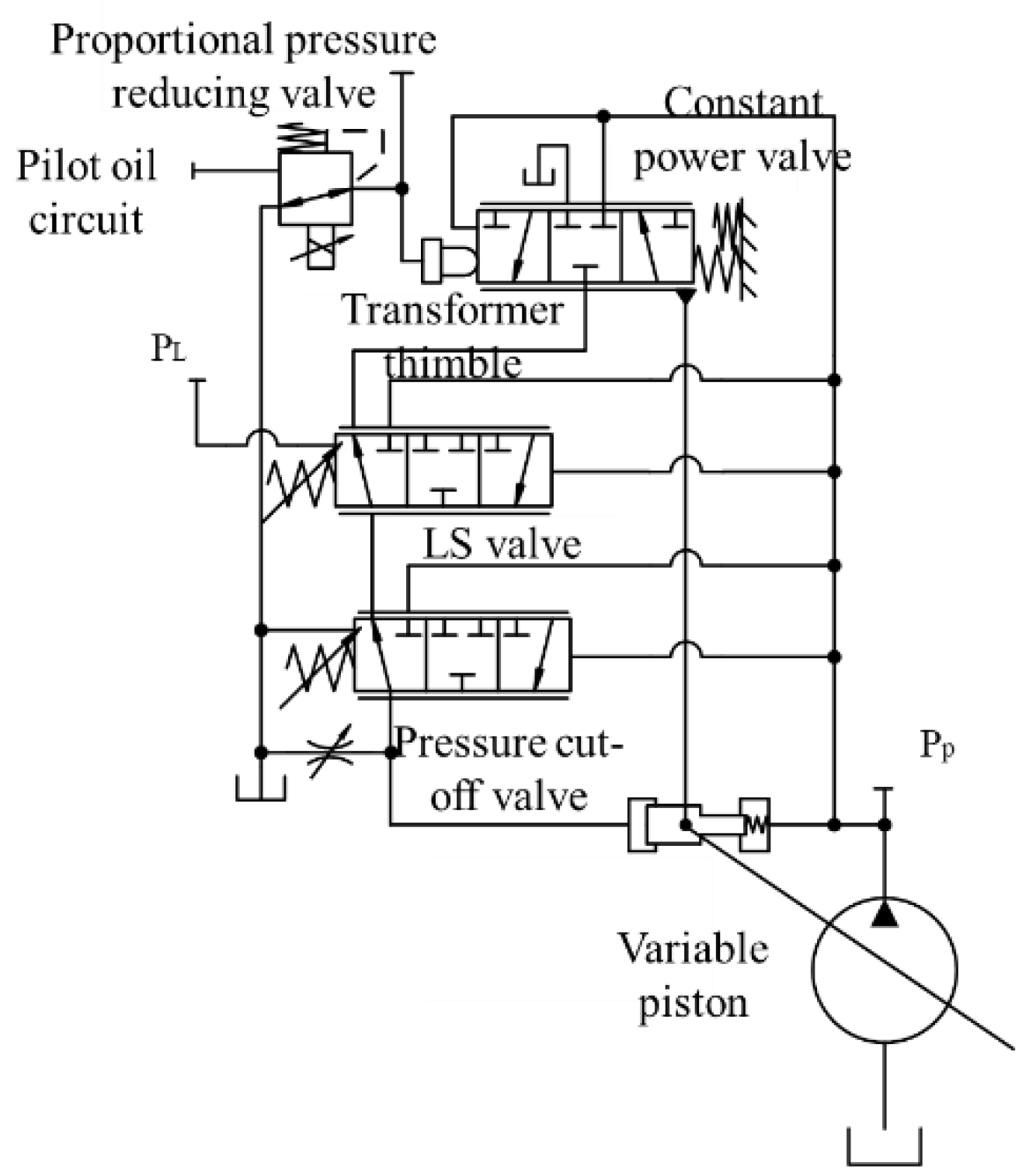
The simulation research is studied. The system model is established in AMESim and given in
Figure 7.
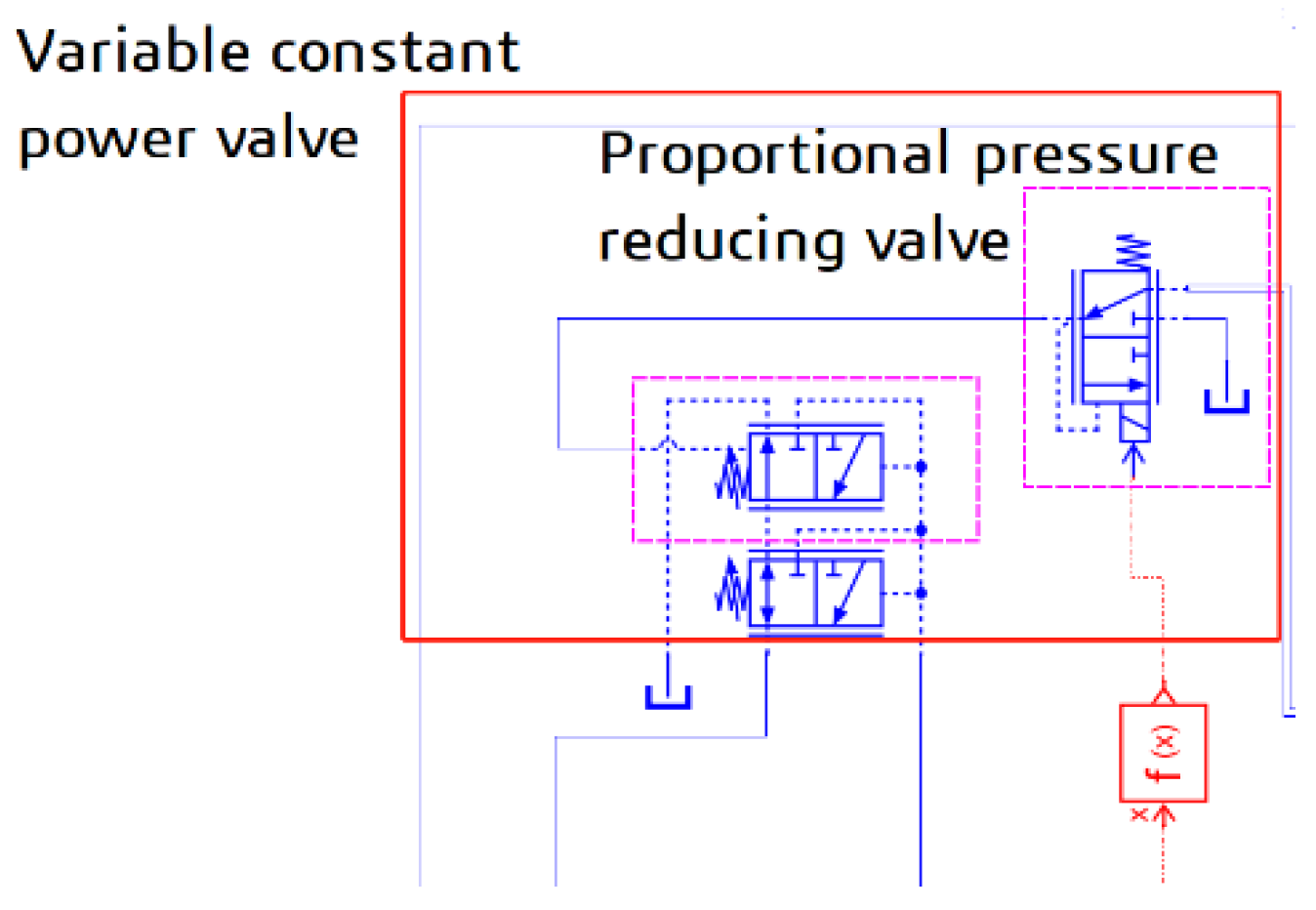
To simplify the simulation model, AMESim module HYDCONLSPC0 is used as the variable constant power valve, as shown in
Figure 8. The key parameters of components in the system are given in
Table 2.
5.1. Speed Segmented Flow Control Simulation
For the speed segmented flow control simulation, the action simulation of the single actuator and multi-actuator is carried out to explore the control performance. The upper and lower limits of electric motor speed are set between 500 and 2000 rpm, which is divided into four speed levels: 500 rpm, 1000 rpm, 1500 rpm, and 2000 rpm.
5.1.1. Flow Control Simulation of Single Actuator
The handle 1 acts alone. Set the maximum flow of the main oil circuit to 160 L/min. Set the pressure of the load proportional overflow valve to 1 MPa. The ratio of target flow to maximum flow is shown in
Figure 9.
During 0–5 s, the handle is in the middle position, and ratio of target flow to maximum flow is 0.
During 5–7 s, the ratio of target flow to maximum flow of the handle increases linearly from 0 to 0.25.
During 7–17 s, the ratio of target flow to maximum flow increases linearly from 0.25 to 1.
During 17–22 s, the ratio of target flow to maximum flow remains 1.
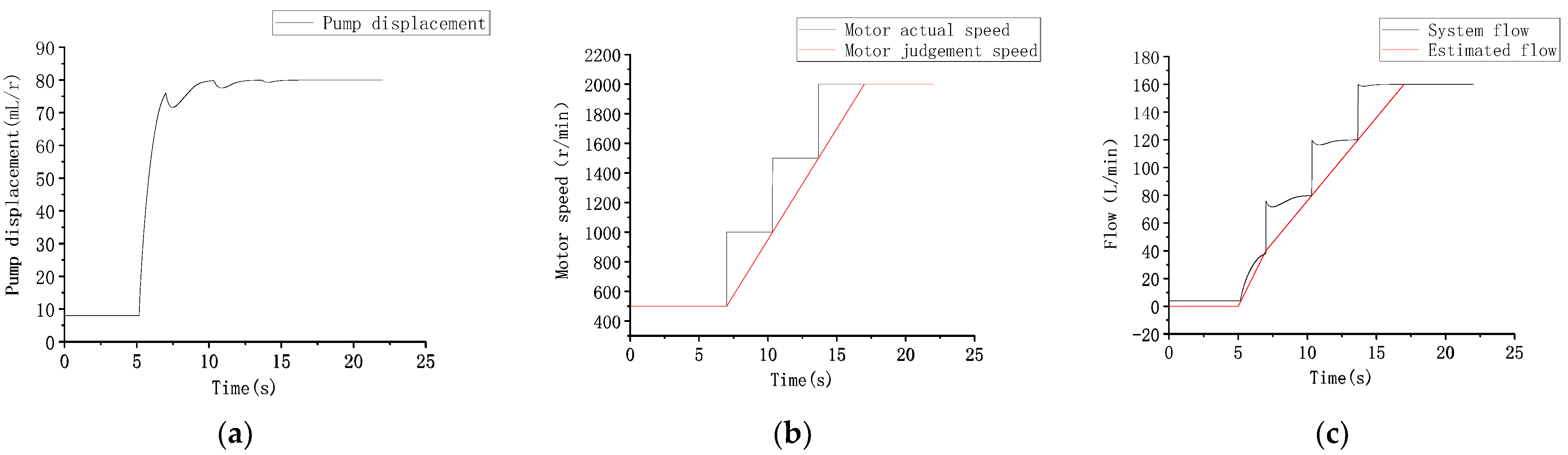
The displacement of variable displacement pump, electric motor speed, and hydraulic system flow can be obtained in
Figure 10.
As can be seen, during 0–5 s, the ratio of target flow to the maximum flow of the pilot handle is 0. The target flow of the system is 0 L/min. The electric motor is in the idle stage, and the speed is 500 rpm. The pump works at the minimum displacement of 8 mL/r, so the actual hydraulic system overflows with the minimum flow.
During 5–7 s, the ratio of target flow to the maximum flow of the handle increases from 0 to 0.25. At this time, the target flow of the system increases from 0 to 40 L/min. This stage is in the variable displacement pump stage. The pump displacement increases from 8 to 80 mL/r, which can meet the system flow demand. Therefore, the electric motor keeps running at 500 rpm, the actual flow of the system is 40 L/min, and all flow into the actuator oil circuit.
During 7 to 17 s, the ratio of target flow to maximum flow increases from 0.25 to 1, and the pump displacement remains near the maximum displacement of 80 mL/r. The estimated flow of the system increases with the increase in handle pilot pressure. The electric motor enters the variable speed stage. The system adjusts the electric motor speed step by step according to the speed segmented control strategy. The electric motor speed runs from 500 to 1000 rpm and 1500 to 2000 rpm with the increase in the pilot pressure of the handle. The actual flow of the system also starts from 40 L/min and then at 80 L/min, 120 L/min, and 160 L/min.
During 17 to 22 s, the ratio of target flow to the maximum flow of the handle is maintained at 1. The estimated flow of the system is maintained at 160 L/min. The electric motor is maintained at 2000 rpm. The hydraulic system is maintained at the maximum flow stage.
5.1.2. Flow Control Simulation of Multi-Actuators
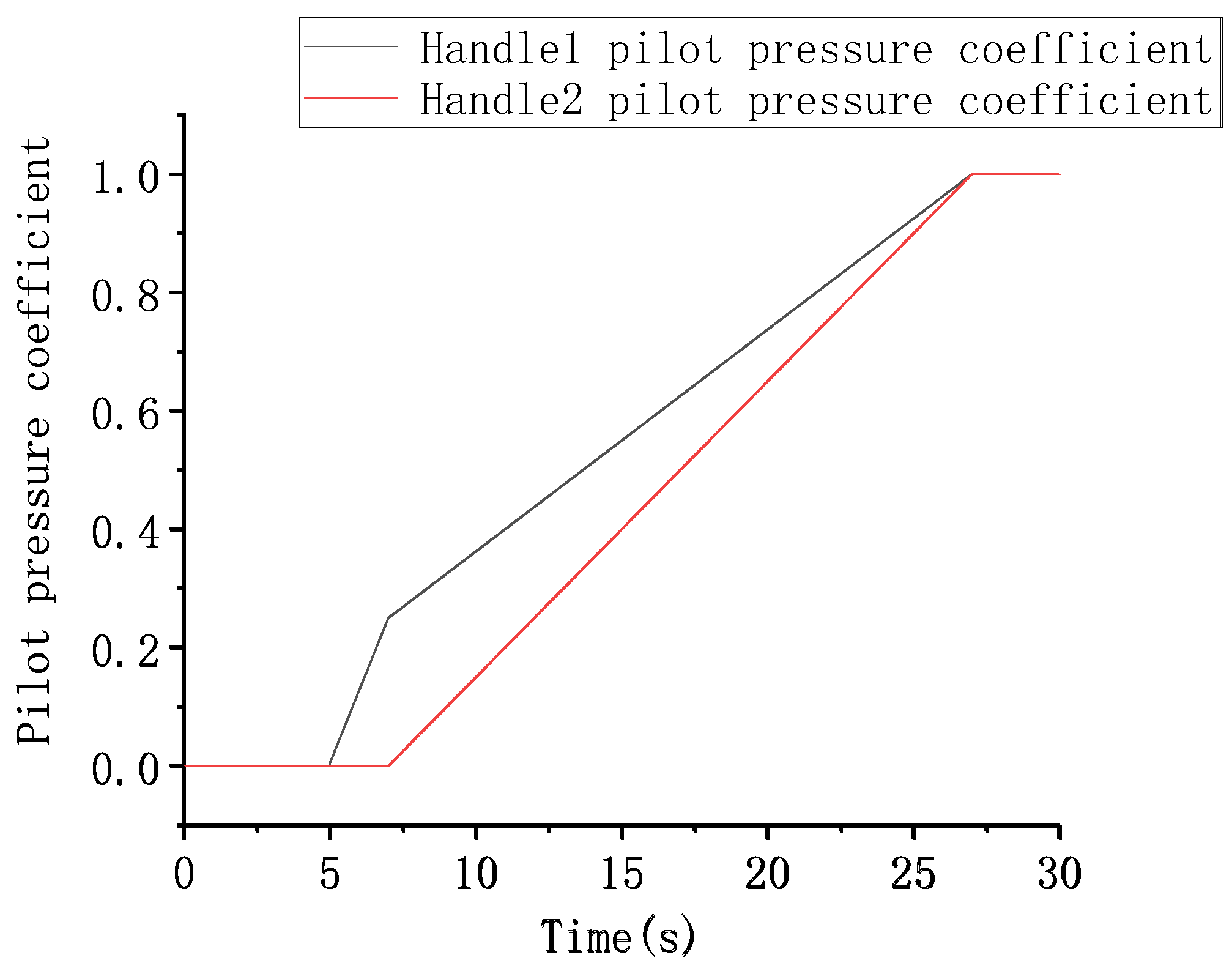
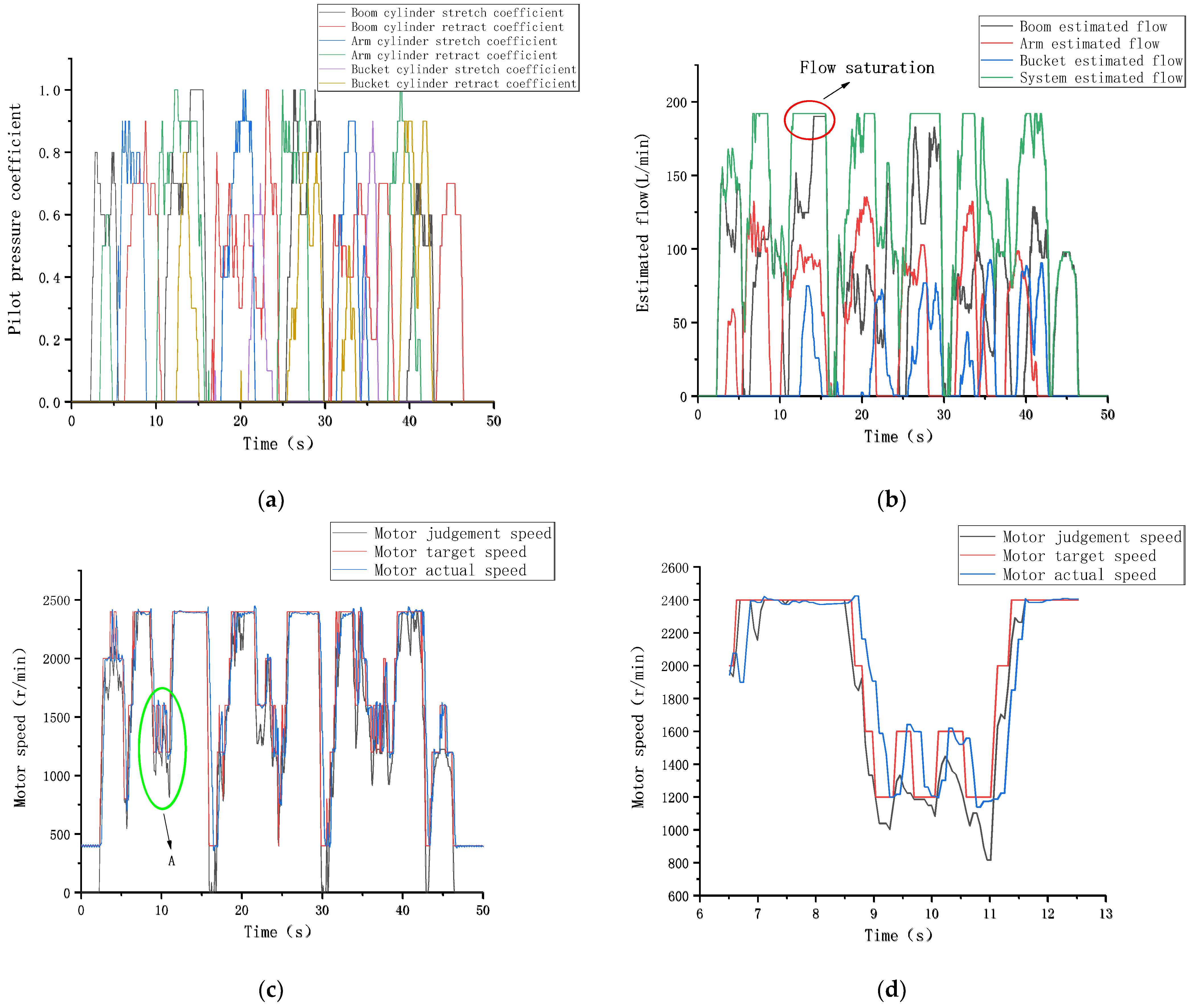
Handle 1 controls the maximum flow of the oil circuit at 160 L/min, and handle 2 controls the maximum flow of the oil circuit at 80 L/min. A 1 MPa load is added to oil circuit 1 and oil circuit 2, respectively. To analyze the flow matching of the electric motor-variable speed control system when multiple actuators move and the flow saturation when the target flow is higher than the maximum flow of the system, the multi-actuators flow control simulation of the system is carried out. The input curve of ratios of target flow to a maximum flow of handle 1 and handle 2 is shown in
Figure 11.
During 0–5 s, handle 1 and handle 2 remain in the middle position, and the ratios of target flow to maximum flow are 0.
During 5–7 s, the ratio of target flow to the maximum flow of handle 1 increases linearly from 0 to 0.25, and the ratio of target flow to the maximum flow of handle 2 remains 0.
During 7–27 s, the ratio of target flow to the maximum flow of handle 1 increases linearly from 0.25 to 1, and the ratio of target flow to the maximum flow of handle 2 increases from 0 to 1.
During 27 to 30 s, the ratios of target flow to the maximum flow of handle 1 and handle 2 remain 1.
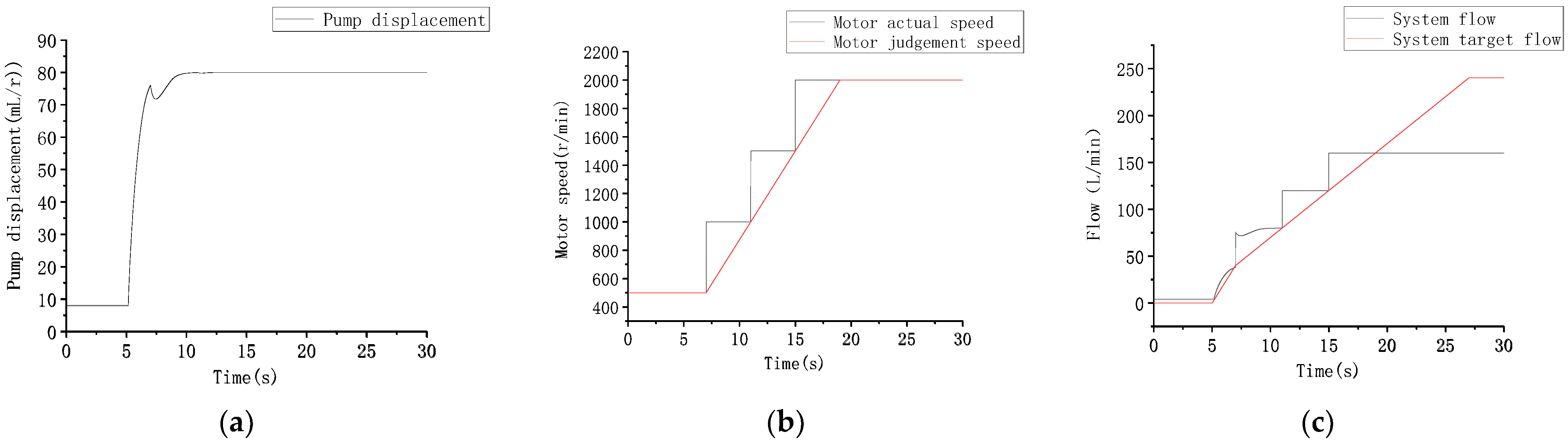
The displacement of the variable displacement pump, electric motor speed, and hydraulic system flow is obtained and given in
Figure 12.
During 0–5 s, the ratios of target flow to the maximum flow of handle 1 and handle 2 are 0. The estimated flow of the system is 0 L/min. The electric motor is 500 rpm. The pump is at the minimum displacement of 8 mL/r. Therefore, the actual hydraulic system overflows with a minimum flow of 40 L/min.
During 5–7 s, the ratio of target flow to the maximum flow of handle 1 increases linearly from 0 to 0.25. The ratios of target flow to the maximum flow of handle 2 remain 0. At this time, the estimated flow of the system increases from 0 to 40 L/min. This stage is in the variable displacement stage of the variable displacement pump. The pump displacement increases from 8 to 80 mL/r, which can meet the flow demand of the system. Therefore, the electric motor keeps running at 500 rpm, and the actual flow of the system is 40 L/min, all of which flows into the oil circuit of the actuator.
During 7–19 s, the ratio of target flow to the maximum flow of handle 1 increases linearly from 0.25. The ratio of target flow to the maximum flow of handle 2 increases linearly from 0, and the estimated flow increases linearly from 40 to 160 L/min. The target speed of the electric motor increases from 500 to 2000 rpm. According to the speed segmented control strategy of electric motor speed, the electric motor speed starts from 500 rpm and runs at 1000 rpm, 1500 rpm, and 2000 rpm successively, and the system flow from 40 to 80 L/min, 120 L/min, and 160 L/min successively. The pump displacement shall be kept at the maximum displacement of 80 mL/r.
During 19–27 s, the estimated flow of the system at 19 s reaches the maximum flow of the system, which is 160 L/min. At this time, the motor speed reaches and remains at the maximum speed of 2000 rpm, the variable displacement pump remains at the maximum displacement of 80 mL/r, and the system is in the flow saturation stage. The ratio of target flow to the maximum flow of pilot handle 1 and pilot handle 2 continues to increase linearly to 1, the estimated flow increases linearly to 240 L/min, and the actual system flow remains at 160 L/min.
During 27 to 30 s, the ratios of target flow to the maximum flow of both handles are kept at 1. The pump displacement is kept at the maximum displacement of 80 mL/r. The electric motor speed is kept at the maximum speed of 2000 rpm. The actual system flow is kept at the maximum flow of 160 L/min.
5.2. Speed Segmented Variable Constant Power Control Simulation
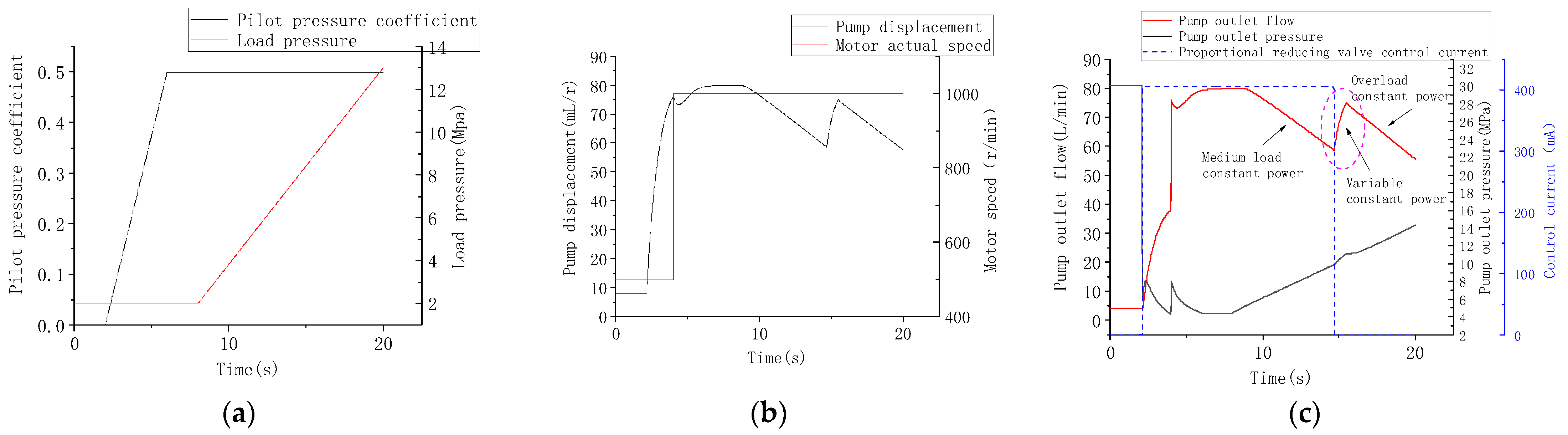
Under the constant power condition, the pump is at a constant speed, and the pump outlet flow changes with the pump outlet pressure. Therefore, the variable constant power control function of the hydraulic pump is realized by making the electric motor at a certain speed level through the speed segmented control strategy. To verify the reliability of the speed segmented variable constant power control system, the electric motor speed stages of 1000 and 2000 rpm are simulated, respectively. The working condition switching is set from medium load to heavy load mode. Set the starting pressure of the medium load constant power valve to 5.1 MPa and that of the heavy load constant power valve to 9.9 MPa. The purpose of this experiment is mainly to verify the function of variable constant power, so the test can be carried out with the movement of a single actuator. The maximum flow of the actuator is 160 L/min. The proportional overflow valve is used to load the oil circuit. The simulation results of test 1 and test 2 are given in
Figure 13 and
Figure 14, which are the main parameter curves of variable constant power control in the 1000 rpm speed stage and variable power control in the 2000 rpm speed stage, respectively.
As can be seen, the speed segmented control strategy can realize the variable constant power operation in a certain speed range. The time when the two groups of simulation test electric motors reach the fixed speed range is the same. Moreover, the load application is the same. The simulation of variable constant power control under the condition of speed classification is analyzed.
During 0–2 s, the ratio of target flow to the maximum flow of the pilot handle is kept at 0. The pump displacement is the minimum, and the electric motor is kept at an idle speed of 500 rpm. The system is in the minimum flow overflow stage.
During 2–4 s, the ratio of target flow to the maximum flow of the pilot handle increases from 0 to 0.25. The pump displacement increases to 80 mL/r, the motor operates at 500 rpm, the system is in the variable displacement flow control stage, the hydraulic oil flows into the actuator, and the pump outlet pressure decreases.
During 4–6 s, the ratio of target flow to the maximum flow of test I (1000 rpm) and test II (2000 rpm) handle increases from 0.25 to 0.5 and 1, respectively. The pump displacement remains at the maximum value of 80 mL/r. The system is in the variable speed flow control stage. Through the speed segmented control strategy, the system increases to 1000 and 2000 rpm, respectively. The system flow increases to 80 L/min and 160 L/min, respectively.
During 6–9 s, the ratio of target flow to the maximum flow of the handle remains unchanged. Test 1 and test 2 maintain electric motor speed and system flow unchanged; the load gradually increases from 8 s, and the pump outlet pressure also increases. At this time, by monitoring the pump outlet pressure, it is recognized that the working condition is under medium load condition, and the control current of the electric proportional reducing valve is 405 mA.
When the outlet pressure of the pump exceeds the constant load at 15 s, the outlet pressure of the pump increases, and the displacement of the pump decreases.
During 15–20 s, as the load increases, the pump outlet pressure exceeds 9.9 MPa, and the system identifies the working condition as heavy load working condition. The control current of the electric proportional reducing valve changes to 0 mA. The starting regulating pressure of the variable constant power valve changes so that the system works under heavy load working conditions. The pump displacement increases from 58 to 75 mL/ at 15 s so as to realize the adaptive function of working conditions and make the hydraulic pump operate in the heavy load constant power stage. The pump outlet flow continues to decrease as the pump outlet pressure increases.
Based on the above analysis, the speed segmented variable constant power c strategy can enable the hydraulic system to realize the working condition identification at each speed stage and adjust the starting pressure of the variable constant power valve by changing the current of the electric proportional relief valve to realize the working condition adaptation. The simulation results show that the speed segmented variable constant power control is feasible and reliable, which can meet the requirements of variable constant power matching.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}