
Electrification of a Class 8 Heavy-Duty Truck Considering Battery Pack Sizing and Cargo Capacity



Abstract
1. Introduction
2. Methodology
2.1. Battery Electric Powertrain Modelling
2.2. Parametric Analysis
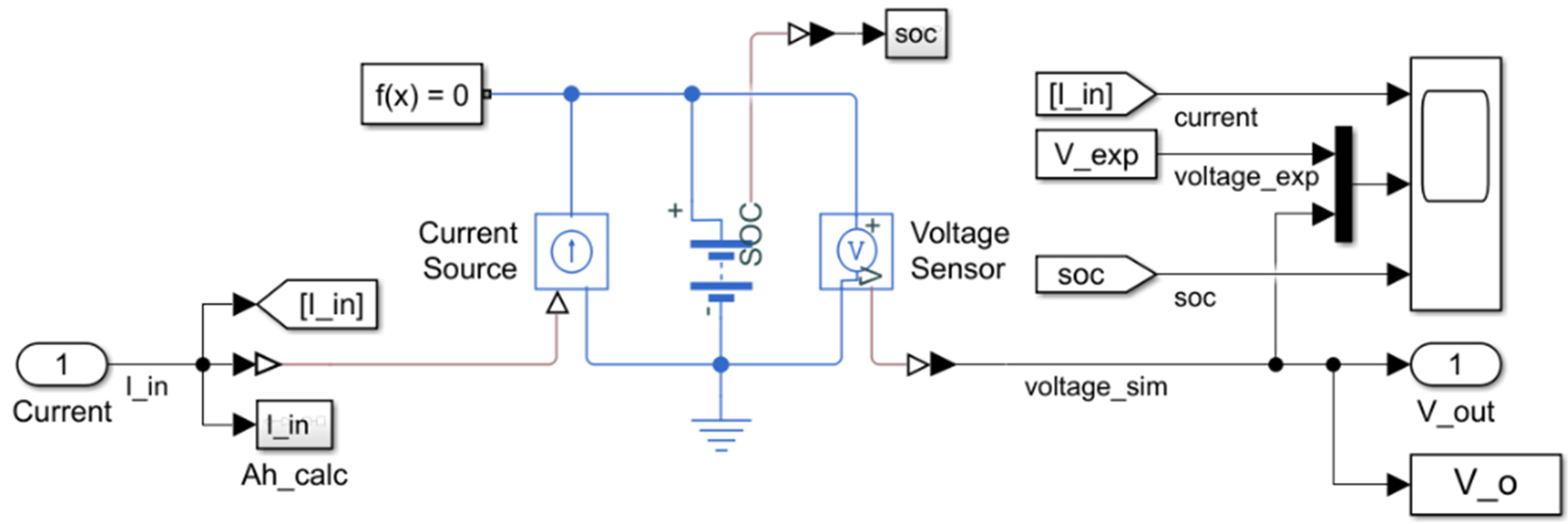
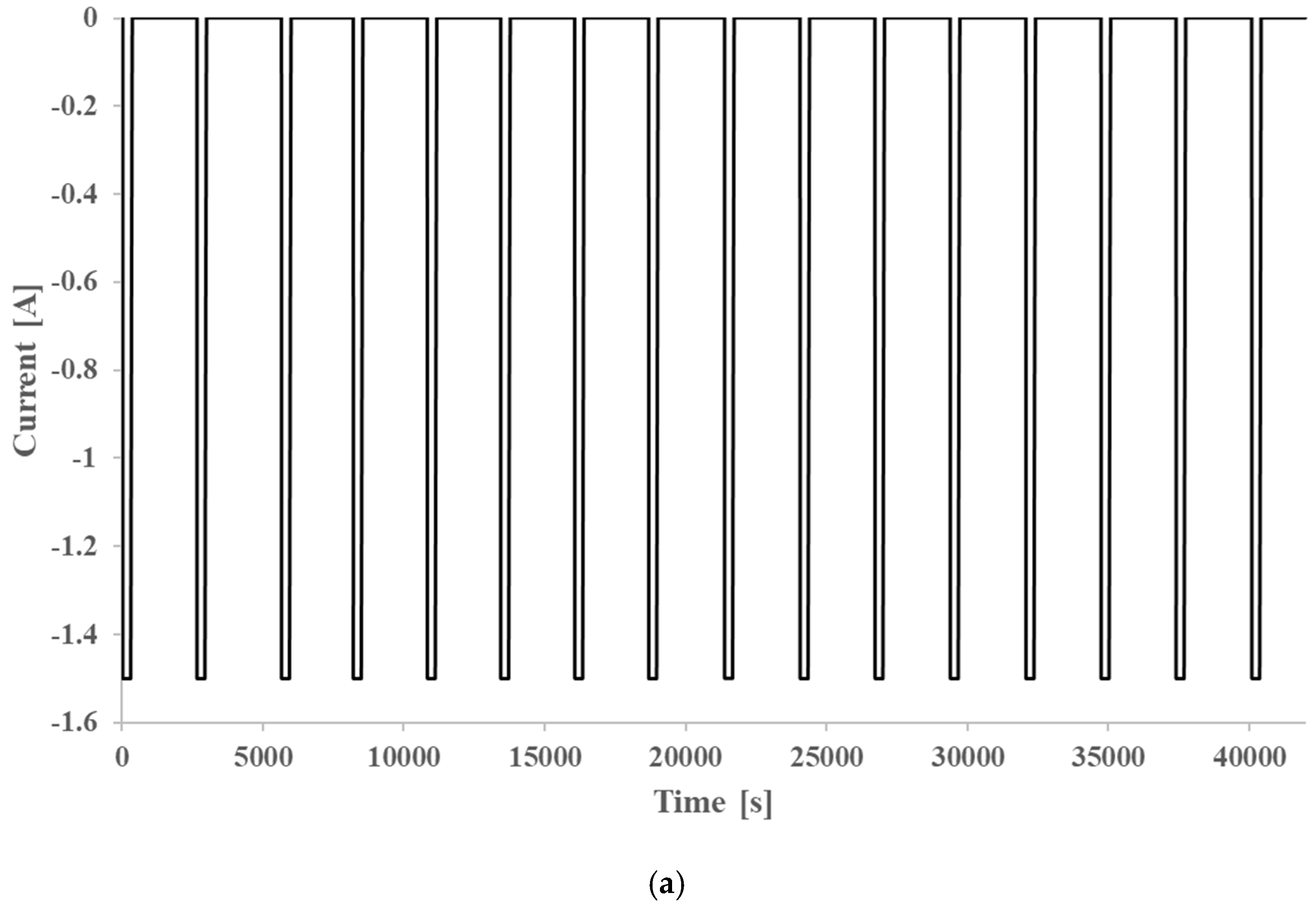
2.3. Battery Cell Characterization
3. Result and Discussion
3.1. Experimental Tests Results
3.2. Parametric Analysis
4. Conclusions
- -
- Electrification of the Mercedes–Benz Actros 41-ton truck resulted in decreasing of its cargo capacity from 13.5 tons to 12.27 tons, 11.86 tons, and 11.46 tons by increasing battery pack size from 399 kWh to 456 kWh and 513 kWh, respectively.
- -
- Employment of dual electric motors in the powertrain resulted in gaining desired torque at various speeds during travel in long haul driving cycle.
- -
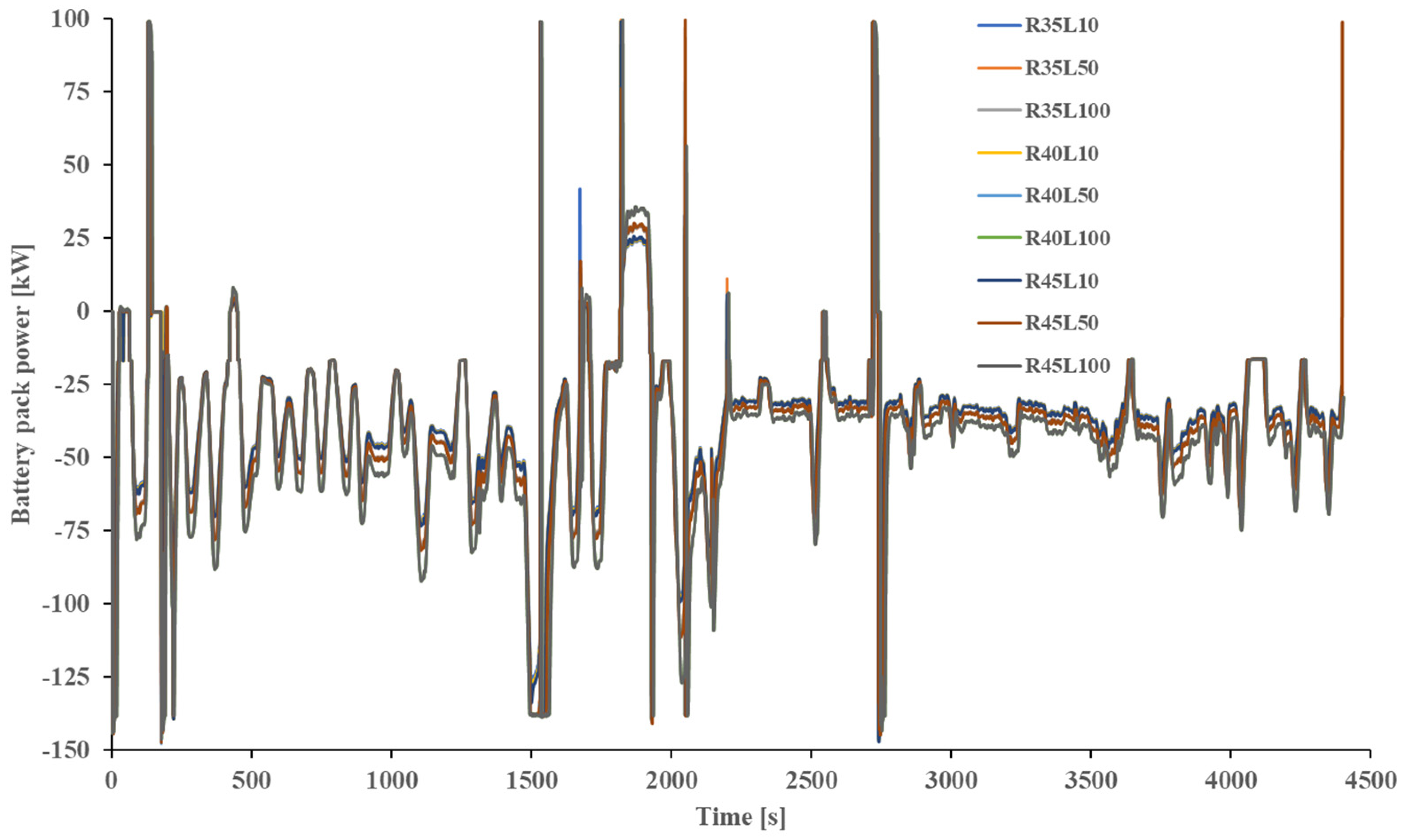
- Increasing the battery size boosted the overall voltage of the pack, while an increment in occupied cargo capacity resulted in a decreased battery pack voltage due to faster discharging of the pack, leading to a sharp decrease in voltage.
- -
- The greatest decrease in voltage was achieved in battery packs when the cargo capacity was equal to 100% and the lowest size of battery pack was used. This leads to a sharper decrease in the battery pack voltage due to high power demand, resulting in a lower SOC at the end of travel compared to other scenarios.
- -
- The highest charging peaks were achieved for the scenario with the biggest battery pack size and full cargo capacity due to recovering higher values of regenerative brake energy.
- -
- Regenerative brake energy increased from 6.94 kWh to approximately 9.87 kWh by incrementing the truck occupied cargo capacity up to 100%.
- -
- Increase of total battery packs size from 399 kWh to 456 kWh and 513 kWh resulted in energy recovery increases of 1.73% and 3.46% for 10% load, 0.98% and 2.2% for 50% load and 0.41% and 0.74% for 100% load, respectively.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| EV | Electric Vehicle |
| ECM | Equivalent Circuit Model |
| SOC | State of Charge |
| HPPC | Hybrid Pulse Power Characterization |
| ICE | Internal Combustion Engine |
References
- Ding, S.; Li, R. Forecasting the sales and stock of electric vehicles using a novel self-adaptive optimized grey model. Eng. Appl. Artif. Intell. 2021, 100, 104148. [Google Scholar] [CrossRef]
- Borlaug, B.; Muratori, M.; Gilleran, M.; Woody, D.; Muston, W.; Canada, T.; Ingram, A.; Gresham, H.; McQueen, C. Heavy-duty truck electrification and the impacts of depot charging on electricity distribution systems. Nat. Energy 2021, 6, 673–682. [Google Scholar] [CrossRef]
- Machado, P.G.; Teixeira, A.C.; Collaço, F.M.; Mouette, D. Review of life cycle greenhouse gases, air pollutant emissions and costs of road medium and heavy-duty trucks. Wiley Interdiscip. Rev. Energy Environ. 2021, 10, e395. [Google Scholar] [CrossRef]
- Fenton, D.; Kailas, A. Redefining Goods Movement: Building an Ecosystem for the Introduction of Heavy-Duty Battery-Electric Vehicles. World Electr. Veh. J. 2021, 12, 147. [Google Scholar] [CrossRef]
- IEA. Trucks and Buses; IEA: Paris, France, 2022. Available online: https://www.iea.org/reports/trucks-and-buses (accessed on 1 August 2022).
- Borlaug, B.; Moniot, M.; Birky, A.; Alexander, M.; Muratori, M. Charging Needs for Electric Semi-Trailer Trucks. SSRN Electron. J. 2022. [Google Scholar] [CrossRef]
- Giuliano, G.; Dessouky, M.; Dexter, S.; Fang, J.; Hu, S.; Miller, M. Heavy-duty trucks: The challenge of getting to zero. Transp. Res. Part D Transp. Environ. 2021, 93, 102742. [Google Scholar] [CrossRef]
- Kyle, P.; Kim, S.H. Long-term implications of alternative light-duty vehicle technologies for global greenhouse gas emissions and primary energy demands. Energy Policy 2011, 39, 3012–3024. [Google Scholar] [CrossRef]
- Mauler, L.; Dahrendorf, L.; Duffner, F.; Winter, M.; Leker, J. Cost-effective technology choice in a decarbonized and diversified long-haul truck transportation sector: A US case study. J. Energy Storage 2022, 46, 103891. [Google Scholar] [CrossRef]
- Xie, S.; Lang, K.; Qi, S. Aerodynamic-aware coordinated control of following speed and power distribution for hybrid electric trucks. Energy 2020, 209, 118496. [Google Scholar] [CrossRef]
- Mareev, I.; Becker, J.; Sauer, D.U. Battery dimensioning and life cycle costs analysis for a heavy-duty truck considering the requirements of long-haul transportation. Energies 2018, 11, 55. [Google Scholar] [CrossRef]
- Cunanan, C.; Tran, M.-K.; Lee, Y.; Kwok, S.; Leung, V.; Fowler, M. A Review of Heavy-Duty Vehicle Powertrain Technologies: Diesel Engine Vehicles, Battery Electric Vehicles, and Hydrogen Fuel Cell Electric Vehicles. Clean Technol. 2021, 3, 474–489. [Google Scholar] [CrossRef]
- Coban, H.H.; Rehman, A.; Mohamed, A. Analyzing the Societal Cost of Electric Roads Compared to Batteries and Oil for All Forms of Road Transport. Energies 2022, 15, 1925. [Google Scholar] [CrossRef]
- Vijayagopal, R.; Rousseau, A. Electric truck economic feasibility analysis. World Electr. Veh. J. 2021, 12, 75. [Google Scholar] [CrossRef]
- Mareev, I.; Sauer, D.U. Energy Consumption and Life Cycle Costs of Overhead Catenary Heavy-Duty Trucks for Long-Haul Transportation. Energies 2018, 11, 3446. [Google Scholar] [CrossRef]
- Tanco, M.; Cat, L.; Garat, S. A break-even analysis for battery electric trucks in Latin America. J. Clean. Prod. 2019, 228, 1354–1367. [Google Scholar] [CrossRef]
- Nykvist, B.; Olsson, O. The feasibility of heavy battery electric trucks. Joule 2021, 5, 901–913. [Google Scholar] [CrossRef]
- Baek, D.; Chen, Y.; Chang, N.; Macii, E.; Poncino, M. Optimal Battery Sizing for Electric Truck Delivery. Energies 2020, 13, 709. [Google Scholar] [CrossRef]
- Available online: https://www.avl.com/cruise-m (accessed on 1 August 2022).
- Mantriota, G.; Reina, G. Dual-Motor Planetary Transmission to Improve Efficiency in Electric Vehicles. Machines 2021, 9, 58. [Google Scholar] [CrossRef]
- Agamloh, E.; von Jouanne, A.; Yokochi, A. An Overview of Electric Machine Trends in Modern Electric Vehicles. Machines 2020, 8, 20. [Google Scholar] [CrossRef]
- Dixit, M.; Parejiya, A.; Essehli, R.; Muralidharan, N.; Haq, S.U.; Amin, R.; Belharouak, I. SolidPAC is an interactive battery-on-demand energy density estimator for solid-state batteries. Cell Rep. Phys. Sci. 2022, 3, 100756. [Google Scholar] [CrossRef]
- Sankaran, G.; Venkatesan, S. Standardization of electric vehicle battery pack geometry form factors for passenger car segments in India. J. Power Sources 2021, 502, 230008. [Google Scholar] [CrossRef]
- Yang, C. Running battery electric vehicles with extended range: Coupling cost and energy analysis. Appl. Energy 2022, 306, 118116. [Google Scholar] [CrossRef]
- Li, J.; Du, Z.; Ruther, R.E.; An, S.J.; David, L.A.; Hays, K.; Wood, M.; Phillip, N.D.; Sheng, Y.; Mao, C. Toward low-cost, high-energy density, and high-power density lithium-ion batteries. JOM 2017, 69, 1484–1496. [Google Scholar] [CrossRef]
- Pell, J.; Schörghuber, C.; Schubert, T.; Ozli, S. Energy and Lifetime Management for Fuel Cell Powered Trucks. ATZheavy Duty Worldw. 2020, 13, 42–47. [Google Scholar] [CrossRef]
- Basma, H.; Beys, Y.; Rodríguez, F. Battery Electric Tractor-Trailers in the European Union: A Vehicle Technology Analysis. Retrieved from the International Council on Clean Transportation. 2021. Available online: https://theicct.org/publications/eu-tractor-trailers-analysis-aug21 (accessed on 1 August 2022).
- Hales, A.; Brouillet, E.; Wang, Z.; Edwards, B.; Samieian, M.A.; Kay, J.; Mores, S.; Auger, D.; Patel, Y.; Offer, G. Isothermal Temperature Control for Battery Testing and Battery Model Parameterization. SAE Int. J. Electrified Veh. 2021, 10, 105–122. [Google Scholar] [CrossRef]
- Ramesh Babu, A.; Andric, J.; Minovski, B.; Sebben, S. System-Level Modeling and Thermal Simulations of Large Battery Packs for Electric Trucks. Energies 2021, 14, 4796. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Parameter | Value |
|---|---|---|
| Truck body dimensions | Distance from hitch to front axle [mm] | 3450 |
| support point height, bench test [mm] | 1050 | |
| Wheel base [mm] | 3900 | |
| Trailer body dimensions | Distance from hitch to axle [m] | 7.7 |
| Pitching moment coefficient | 1 | |
| Truck nominal weight | Curb weight [kg] | 8000 |
| Gross weight [kg] | 8500 | |
| Trailer nominal weight | Curb weight [kg] | 19,000 |
| Gross weight [kg] | 32,500 | |
| Total carrying capacity | Truck [kg] | 500 |
| Trailer [kg] | 13,500 | |
| Aerodynamic Properties | Frontal Area [m²] | 8.48 |
| Drag coefficient | 0.6 |
| Component | Parameter | Value |
|---|---|---|
| Cell | Nominal voltage [V] | 3.6 |
| Current capacity [Ah] | 3 | |
| Energy capacity [Wh] | 10.8 | |
| Average weight [g] | 46.6 | |
| Estimated energy density [Wh/kg] | 232 | |
| Pack | Cells in series | 176 |
| Cells in parallel | 35 | |
| Module energy capacity [kWh] | 66.5 | |
| Number of Packs | 6 | |
| Packs total energy capacity [kWh] | 399 |
| Component | Parameter | Value |
|---|---|---|
| Diesel | Engine Weight [kg] | 1240 |
| Max engine power [kW] | 460 | |
| Fuel tank weight at 50% capacity [kg] | 382 | |
| Electric | Weight of two motors [kg] | 680 |
| Combined motor power [kW] | 500 | |
| Total battery pack weight [tons] | 1.73–2.54 | |
| Inverter weight [kg] | 72 | |
| DC/DC converter weight [kg] | 35 | |
| Total electric powertrain weight [tons] | 3.64–6.49 |
| Case | Number of Cell Rows | Cargo Capacity [%] |
|---|---|---|
| R35L10 | 35 | 10 |
| R40L10 | 40 | 10 |
| R45L10 | 45 | 10 |
| R35L50 | 35 | 50 |
| R40L50 | 40 | 50 |
| R45L50 | 45 | 50 |
| R35L100 | 35 | 100 |
| R40L100 | 40 | 100 |
| R45L100 | 45 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Leonard, A.T.; Salek, F.; Azizi, A.; Resalati, S. Electrification of a Class 8 Heavy-Duty Truck Considering Battery Pack Sizing and Cargo Capacity. Appl. Sci. 2022, 12, 9683. https://doi.org/10.3390/app12199683
Leonard AT, Salek F, Azizi A, Resalati S. Electrification of a Class 8 Heavy-Duty Truck Considering Battery Pack Sizing and Cargo Capacity. Applied Sciences. 2022; 12(19):9683. https://doi.org/10.3390/app12199683
Chicago/Turabian StyleLeonard, Aiden Thomas, Farhad Salek, Aydin Azizi, and Shahaboddin Resalati. 2022. "Electrification of a Class 8 Heavy-Duty Truck Considering Battery Pack Sizing and Cargo Capacity" Applied Sciences 12, no. 19: 9683. https://doi.org/10.3390/app12199683
APA StyleLeonard, A. T., Salek, F., Azizi, A., & Resalati, S. (2022). Electrification of a Class 8 Heavy-Duty Truck Considering Battery Pack Sizing and Cargo Capacity. Applied Sciences, 12(19), 9683. https://doi.org/10.3390/app12199683