
Displacement Monitoring Requirements and Laser Displacement Monitoring Technology of Bridges with Short and Medium Spans


Abstract
1. Introduction
2. Analysis of the Requirements for Displacement Monitoring Indicators of Short and Medium Span Bridges
3. Development of Wireless Laser Displacement Monitoring Equipment
3.1. The Principle of Laser Ranging Measurement
3.1.1. Phase Laser Ranging
3.1.2. Pulsed Laser Ranging
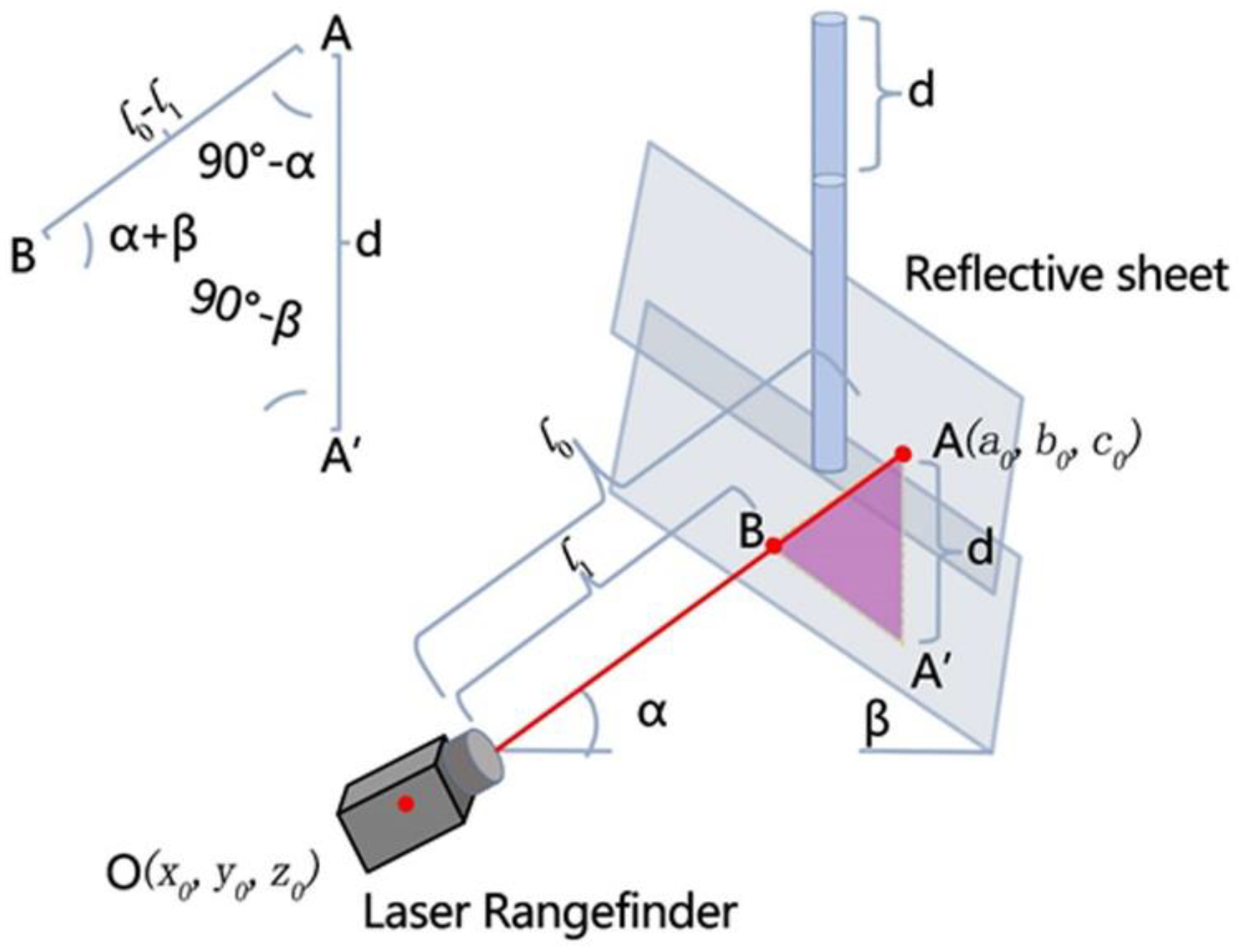
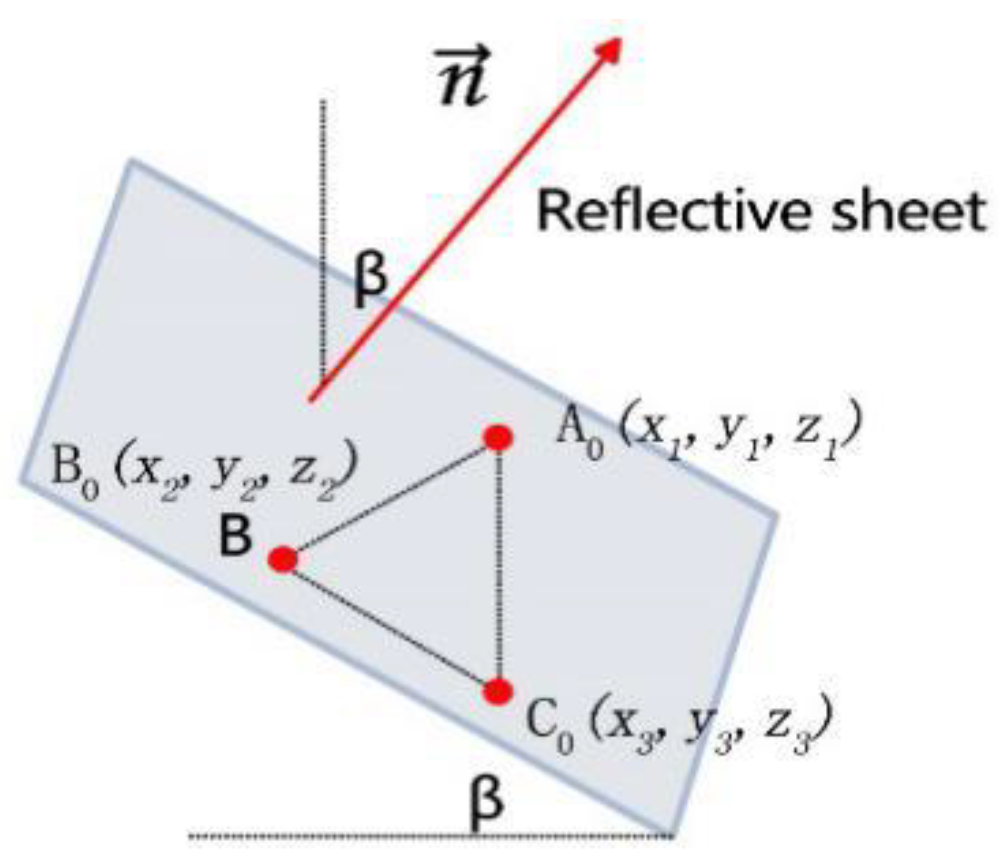
3.2. Measurement Principle of Wireless Laser Displacement Monitoring Equipment
3.3. Indoor Static Loading Test for Verification
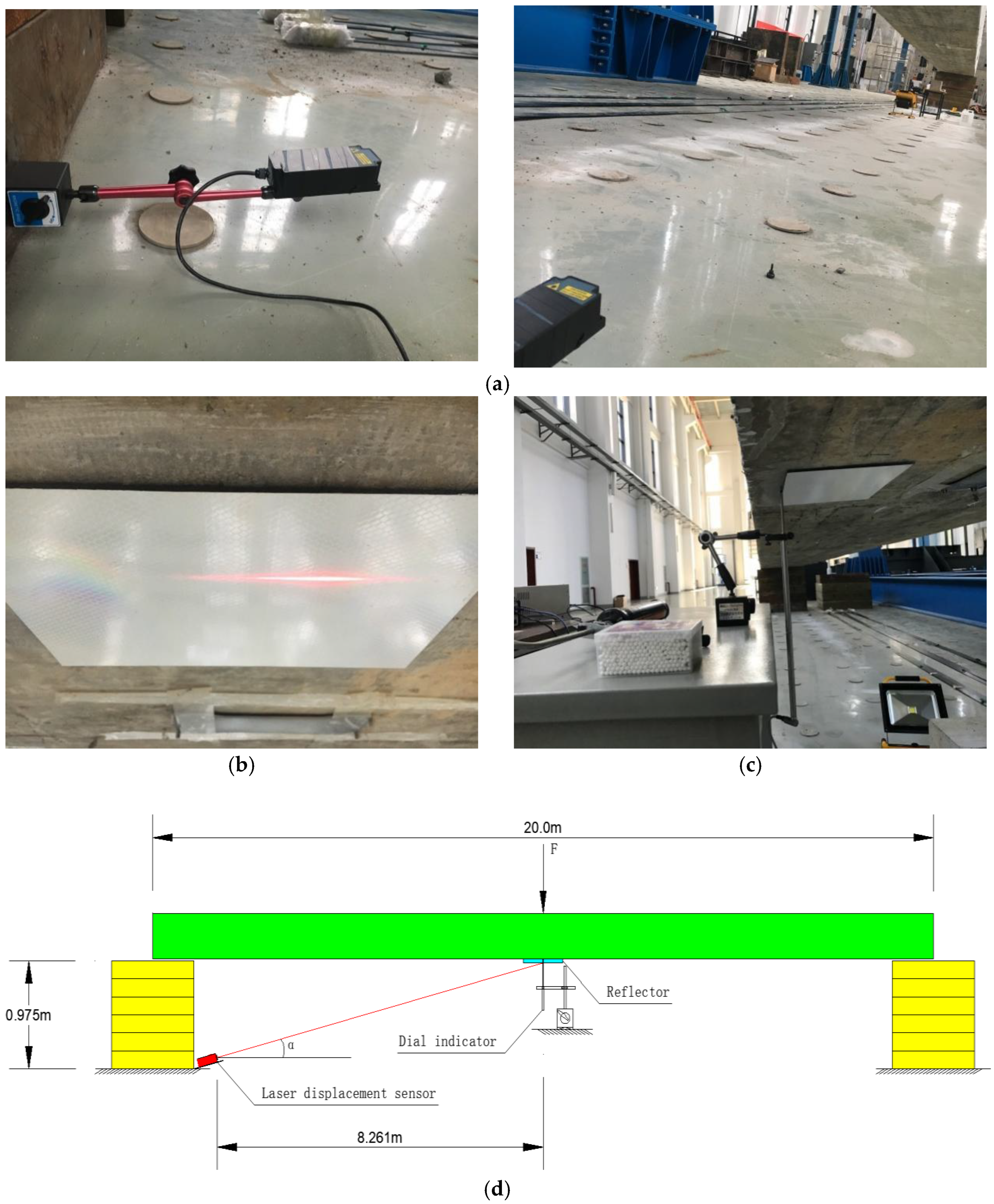
3.3.1. Experimental Setup
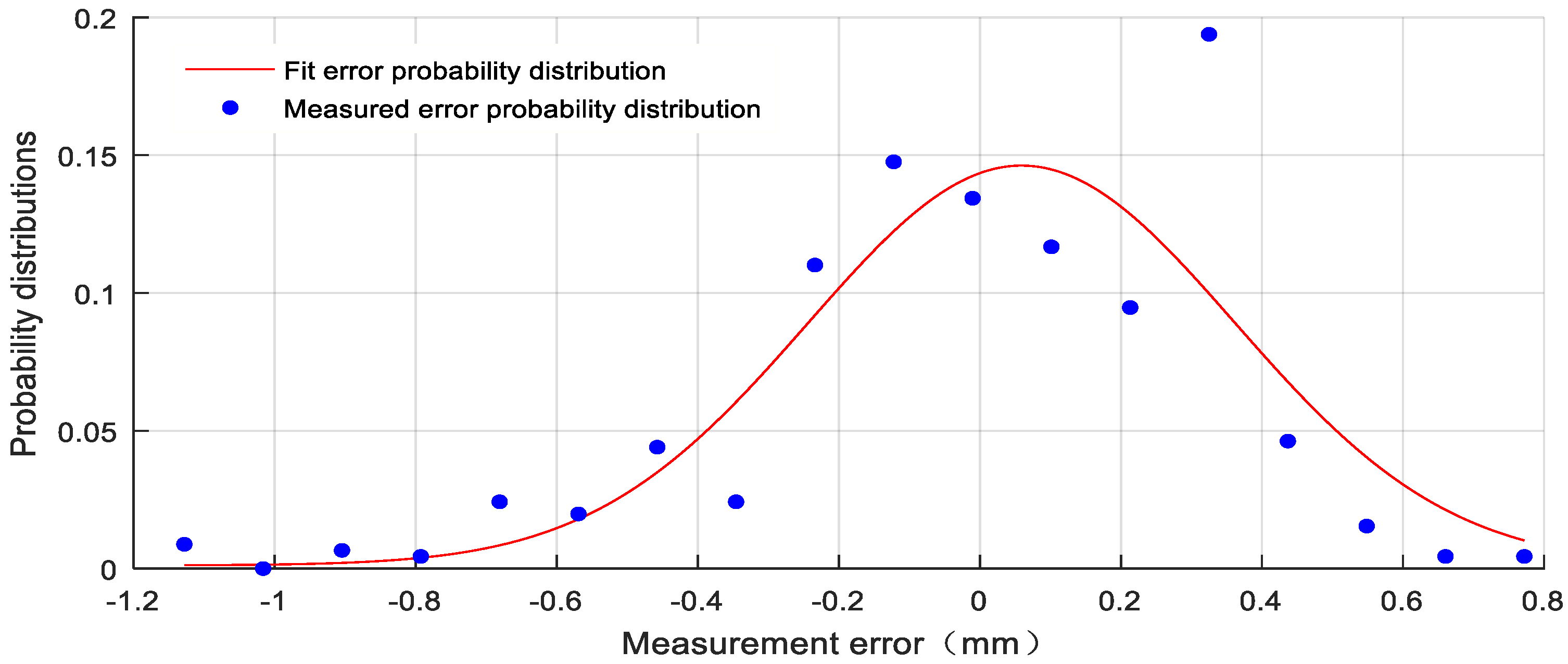
3.3.2. Analysis of Experimental Data
4. Economic and Application Discussion
4.1. Economic Analysis
4.2. Typical Case Analysis
- (1)
- The use of the plan developed in this paper for short and medium-span bridge health monitoring systems saves 43,500 Yuan RMB compared to the plan configured by commercial products, which has certain economic advantages.
- (2)
- Commercial sensor manufacturers in the current market generally only provide sensor equipment, installation and data receiving software, while the design of the bridge health monitoring system, the selection of measuring points, and the further analysis and structural evaluation of the data all need to be carried out by bridge professionals. Completed by a technical unit, only the cost of data analysis software is included in the commercialized system, and the cost incurred in actual operation may not be limited to this. The whole system independently developed by the research group has fully been integrated into the health monitoring system from the initial system design to the final structural state analysis with other methods. The bridge management unit no longer needs the participation of a third party, which can save communication costs and labor costs.
- (3)
- Since the whole system adopts the method of independent research and development, if there is any problem during the operation period of the system, it can be solved by a set of system maintenance controls. Therefore, in actual operation, it is possible to avoid the complicated problems of communication and coordination between the owner, the system design and executing company, and the hardware equipment manufacturer in the current bridge health monitoring system, and it is possible to reduce three-party communication to two-party communication, which significantly improves work efficiency.
- (4)
- The corresponding data receiving and analysis software can be shared by multiple bridges; if the displacement monitor and data acquisition instrument in the monitoring system can be mass-produced, the cost can be further reduced.
5. Conclusions
- (1)
- Short and medium-span bridges, which account for 90% of all bridges, need specific equipment to promote their long-term monitoring. The specific and economical monitoring system based on mid-span displacement developed here is a feasible method to help improve the monitoring system for these bridges.
- (2)
- For concrete, simply supported, girder bridges whose span is within 30 m, the proportion of vehicle live load in all loads decreases as the span increases, the vehicle passing time is approximately 1 s, and the mid-span deflection is approximately 15 mm.
- (3)
- For a span within 30 m, cheap sensors including the displacement is ± 30 mm, the accuracy is ± 0.3 mm, the resolution is 0.1 mm, and the sampling frequency is 10 Hz, with specific specifications to monitor mid-span, which can enrich the monitoring system data and improve the evaluation efficiency.
- (4)
- For the laser displacement sensor that integrates the principles of laser pulse ranging and phase ranging, the maximum theoretical error is calculated to be 0.18 mm, and the maximum error of the measured value is relatively close to the maximum error of the theoretical value.
- (5)
- Because of the intelligent data acquisition method with variable frequency, these monitoring results have strong applicability and are suitable for promotion in the displacement monitoring of short and medium-span bridges as one factor with other methods for health monitoring.
- (6)
- The self-developed data receiving and analysis software can be shared by multiple bridges; if the displacement monitor and data acquisition instrument in the monitoring system can be mass-produced, the cost can be further reduced.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- De Domenico, D.; Messina, D.; Recupero, A. Quality control and safety assessment of prestressed concrete bridge decks through combined field tests and numerical simulation. Structures 2022, 39, 1135–1157. [Google Scholar] [CrossRef]
- Lantsoght, E.O.; van der Veen, C.; de Boer, A.; Hordijk, D.A. State-of-the-art on load testing of concrete bridges. Eng. Struct. 2017, 150, 231–241. [Google Scholar] [CrossRef]
- Han, C.; Luo, X.; Li, X.; Fu, X.; Gu, L.; Ouyang, Z. Study on Bridge Structure Damage and Health Diagnosis Method Based on Health Monitoring. Teh. Vjesn.-Tech. Gaz. 2021, 28, 746–753. [Google Scholar]
- Miyamoto, A.; Kiviluoma, R.; Yabe, A. Frontier of continuous structural health monitoring system for short & medium span bridges and condition assessment. Front. Struct. Civ. Eng. 2019, 13, 569–604. [Google Scholar]
- Miyamoto, A. Development and Practical Application of a Long Term Health Monitoring System for Short and Medium Span Bridges. IABSE Symp. Rep. 2015, 103, 270–279. [Google Scholar]
- Zhang, J.D.; Li, X.Y.; Tian, H.; Chen, X.Y. A Summary of the Application of Structure Health Monitoring Systems for Long-span Bridges. J. Zhejiang Inst. Commun. 2014, 15, 3–7. [Google Scholar]
- Sony, S.; LaVenture, S.; Sadhu, A. A literature review of next-generation smart sensing technology in structural health monitoring. Struct. Control. Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Zhou, J.; Li, X.; Xia, R.; Yang, J.; Zhang, H. Health Monitoring and Evaluation of Long-Span Bridges Based on Sensing and Data Analysis: A Survey. Sensors 2017, 17, 603. [Google Scholar] [CrossRef] [PubMed]
- Chen, Z.; Zhou, X.; Wang, X.; Dong, L.; Qian, Y. Deployment of a Smart Structural Health Monitoring System for Long-Span Arch Bridges: A Review and a Case Study. Sensors 2017, 17, 2151. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Wang, Z.; Wang, Y.; Wang, T.; Luo, Z. Reliability Assessment for PSC Box-Girder Bridges Based on SHM Strain Measurements. J. Sens. 2017, 2017, 8613659. [Google Scholar] [CrossRef]
- Rizzo, P.; Enshaeian, A. Challenges in Bridge Health Monitoring: A Review. Sensors 2021, 21, 4336. [Google Scholar] [CrossRef] [PubMed]
- Solla, M.; Pérez-Gracia, V.; Fontul, S. A Review of GPR Application on Transport Infrastructures: Troubleshooting and Best Practices. Remote Sens. 2021, 13, 672. [Google Scholar] [CrossRef]
- Liu, Y.; Bao, Y. Review of electromagnetic waves-based distance measurement technologies for remote monitoring of civil engineering structures. Measurement 2021, 176, 109193. [Google Scholar] [CrossRef]
- Ye, X.W.; Dong, C.Z.; Liu, T. A Review of Machine Vision-Based Structural Health Monitoring: Methodologies and Applications. J. Sens. 2016, 2016, 7103039. [Google Scholar] [CrossRef]
- Zhou, G.-D.; Yi, T.-H. Recent Developments on Wireless Sensor Networks Technology for Bridge Health Monitoring. Math. Probl. Eng. 2013, 2013, 947867. [Google Scholar] [CrossRef]
- Miyamoto, A.; Yabe, A.; Brühwiler, E. A Vehicle-based Health Monitoring System for Short and Medium Span Bridges and Damage Detection Sensitivity. In Proceedings of the X International Conference on Structural Dynamics (EURODYN 2017), Rome, Italy, 10–13 September 2017; pp. 1955–1963. [Google Scholar]
- Zhang, B.; Zhu, D.; Xu, J.; Tian, H. Overall Situation and Typical Diseases of Medium and Small Span Concrete Bridges in Zhejiang Province. J. Chongqing Jiaotong Univ. (Nat. Sci.) 2013, 32, 742–745. [Google Scholar]
- CCCC Highway Consultants Co., Ltd. General Specifications for Design of Highway Bridges and Culverts; China Communications Press Col., Ltd.: Beijing, China, 2015. [Google Scholar]
- CCCC Highway Consultants Co., Ltd. Code for Design of Highway Reinforced Concrete and Prestressed Concrete Bridge and Culverts; China Communications Press: Beijing, China, 2018. [Google Scholar]
- Zhang, L.; Liu, P.; Yan, X.; Zhao, X. Middle displacement monitoring of medium-small span bridges based on laser technology. Struct. Control. Health Monit. 2020, 27, e2509. [Google Scholar] [CrossRef]
- Martini, A.; Tronci, E.M.; Feng, M.Q.; Leung, R.Y. A computer vision-based method for bridge model updating using displacement influence lines. Eng. Struct. 2022, 259, 114129. [Google Scholar] [CrossRef]
- Park, H.S.; Kim, J.M.; Choi, S.W.; Kim, Y. A Wireless Laser Displacement Sensor Node for Structural Health Monitoring. Sensors 2013, 13, 13204–13216. [Google Scholar] [CrossRef] [PubMed]
- Vicente, M.A.; Gonzalez, D.C.; Minguez, J.; Schumacher, T. A Novel Laser and Video-Based Displacement Transducer to Monitor Bridge Deflections. Sensors 2018, 18, 970. [Google Scholar] [CrossRef] [PubMed]
- Zhao, X.; Liu, H.; Yu, Y.; Xu, X.; Hu, W.; Li, M.; Ou, J. Bridge Displacement Monitoring Method Based on Laser Projection-Sensing Technology. Sensors 2015, 15, 8444–8463. [Google Scholar] [CrossRef] [PubMed]
- Tao, M.; Gong, X.; Hou, Y.; Li, B.; Song, J.; Chen, J.; Gao, F. Time-of-flight ranging method by measuring pulse laser phase based on field-programmable gate array digital mixing. Meas. Sci. Technol. 2021, 32, 025004. [Google Scholar] [CrossRef]
- Ke, J.-Y.; Song, Z.-Q.; Wang, P.-S.; Cui, Z.-M.; Mo, D.; Lin, M.; Wang, R.; Wu, J. Long distance high resolution FMCW laser ranging with phase noise compensation and 2D signal processing. Appl. Opt. 2022, 61, 3443–3454. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID | Method | Accuracy | Scope of Application | Number of Points | Benchmark | Results Representation | Application |
|---|---|---|---|---|---|---|---|
| 1 | dial indicator | um | SD | single or multiple points/each time | GD | changes relative to the earth | commonly |
| 2 | level | mm | SD | single point/each time | GD | changes from horizontal line of sight | commonly |
| 3 | theodolite | cm | SD | single point/each time | GD | changes from horizontal line of sight | commonly |
| 4 | total station | mm | SD | single point/each time | IP | changes from the initial line of sight | commonly |
| 5 | inclinometer | cm | SD/DD | single or multiple points/each time | IR | change from initial state | not much |
| 6 | photo-electric imaging | mm~cm | SD/DD | single point/each time | OA | change from initial position | commonly |
| 7 | connecting pipe | mm | SD | single or multiple points/each time | HP | change from initial state | commonly |
| 8 | differential GPS method | cm | SD/DD | single or multiple points/each time | GD | variation with respect to geodetic coordinates | commonly |
| 9 | laser method | mm | SD/DD | single point/each time | CL | variation relative to collimated laser beam | not much |
| Structure Type | Sectional Form | Span (m) | Beam Height (m) | Board Width (m) | Number of Single Bridge Pieces |
|---|---|---|---|---|---|
| rebar concrete |  | 8 | 0.4 | 1.25 | 9 10 |
| 10 | 0.45 | 1.25 | |||
| prestressed concrete |  | 13 | 0.55 | 1 | 9 11 13 |
| 16 | 0.80 | 1 | |||
| 20 | 0.90 | 1 | |||
| 25 | 1.10 | 1 | |||
| 30 | 1.20 | 1 | |||
| 29.60 30.20 | 1.40 | 1 | 13 | ||
| 33.95 | 1.40 | 1 |
| Structural Properties | Maximum Mid-Span Bending Moment of Main Beam (kN·m) | η1 (%) | η2 (%) | |||||
|---|---|---|---|---|---|---|---|---|
| Structure Type | Span (m) | Beam Plate Quantity (pieces) | Dead Load | Live Load | Standard Combination | Bearing Capacity Limit State Combination | ||
| Middle Beam | Middle Beam | Middle Beam | Middle Beam | |||||
| ordinary reinforced concrete bridge | 8 | 9 | 72.3 | 240.3 | 312.6 | 423.2 | 76.9 | 79.5 |
| 10 | 72.3 | 240.2 | 312.5 | 423.0 | 76.9 | 79.5 | ||
| prestressed concrete bridge | 13 | 9 | 181.2 | 263.0 | 443.1 | 584.4 | 59.4 | 62.8 |
| 11 | 181.2 | 256.0 | 436.2 | 574.6 | 58.7 | 62.2 | ||
| 13 | 181.3 | 253.2 | 433.3 | 570.6 | 58.4 | 61.9 | ||
| 16 | 9 | 344.3 | 353.0 | 695.8 | 905.3 | 50.7 | 54.4 | |
| 11 | 344.4 | 339.3 | 683.3 | 887.7 | 49.7 | 53.5 | ||
| 13 | 344.4 | 333.9 | 678.3 | 880.8 | 49.2 | 53.1 | ||
| 20 | 9 | 617.2 | 456.3 | 1066.8 | 1371.4 | 42.8 | 46.0 | |
| 11 | 617.5 | 450.5 | 1066.8 | 1370.0 | 42.2 | 45.9 | ||
| 13 | 617.7 | 437.7 | 1054.6 | 1352.9 | 41.5 | 45.2 | ||
| 25 | 9 | 1117.5 | 646.4 | 1762.1 | 2243.8 | 36.7 | 40.2 | |
| 11 | 1118.1 | 597.5 | 1713.6 | 2175.8 | 34.9 | 38.3 | ||
| 13 | 1118.5 | 573.9 | 1690.4 | 2143.2 | 34.0 | 37.4 | ||
| 30 | 9 | 1728.8 | 611.8 | 2340.6 | 2931.1 | 26.1 | 29.2 | |
| 11 | 1730.0 | 738.0 | 2467.5 | 3108.5 | 29.9 | 33.2 | ||
| 13 pieces | 1730.8 | 686.1 | 2416.9 | 3037.5 | 28.4 | 31.6 | ||
| Span | Vehicle Passing Time | Span | Vehicle Passing Time |
|---|---|---|---|
| 8 m | 0.48 s | 20 m | 1.2 s |
| 10 m | 0.6 s | 25 m | 1.5 s |
| 13 m | 0.78 s | 30 m | 1.8 s |
| 16 m | 0.96 s | / | / |
| Structure Type | Span (m) | Beam Plate Quantity (pieces) | Mid-Span Deformation of Side Beam (mm) |
|---|---|---|---|
| ordinary reinforced concrete bridge | 8 | 9 | 5.74 |
| 10 | 5.69 | ||
| prestressed concrete bridge | 13 | 9 | 7.25 |
| 11 | 6.85 | ||
| 13 | 6.29 | ||
| 16 | 9 | 5.80 | |
| 11 | 5.64 | ||
| 13 | 4.94 | ||
| 20 | 9 | 9.30 | |
| 11 | 9.21 | ||
| 13 | 8.17 | ||
| 25 | 9 | 11.90 | |
| 11 | 11.62 | ||
| 13 | 10.22 | ||
| 30 | 9 | 12.60 | |
| 11 | 16.36 | ||
| 13 | 14.27 |
| Precision | Resolution (mm) | Range (mm) | Protection Class | Sampling Frequency (Hz) |
|---|---|---|---|---|
| ±0.3 mm | 0.1 | ±30 | IP67 | 10 Hz |
| Serial Number | Laser Ranging Accuracy Δl (mm) | Displacement Measurement Accuracy Δd (mm) | α (°C) |
|---|---|---|---|
| 1 | 1.0 | 0.10 | 5.7 |
| 2 | 1.0 | 0.16 | 9 |
| 3 | 1.0 | 0.20 | 11.5 |
| 4 | 1.0 | 0.21 | 12 |
| 5 | 1.0 | 0.26 | 15 |
| 6 | 1.0 | 0.30 | 17.5 |
| 7 | 1.0 | 0.40 | 23.6 |
| 8 | 1.0 | 0.50 | 30 |
| 9 | 1.0 | 0.71 | 45 |
| 10 | 1.0 | 0.87 | 60 |
| 11 | 1.0 | 1.0 | 90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Li, F. Displacement Monitoring Requirements and Laser Displacement Monitoring Technology of Bridges with Short and Medium Spans. Appl. Sci. 2022, 12, 9663. https://doi.org/10.3390/app12199663
Li X, Li F. Displacement Monitoring Requirements and Laser Displacement Monitoring Technology of Bridges with Short and Medium Spans. Applied Sciences. 2022; 12(19):9663. https://doi.org/10.3390/app12199663
Chicago/Turabian StyleLi, Xiaoya, and Fangyuan Li. 2022. "Displacement Monitoring Requirements and Laser Displacement Monitoring Technology of Bridges with Short and Medium Spans" Applied Sciences 12, no. 19: 9663. https://doi.org/10.3390/app12199663
APA StyleLi, X., & Li, F. (2022). Displacement Monitoring Requirements and Laser Displacement Monitoring Technology of Bridges with Short and Medium Spans. Applied Sciences, 12(19), 9663. https://doi.org/10.3390/app12199663