

The Development of Rubber Tapping Machines in Intelligent Agriculture: A Review



Abstract
:1. Introduction
2. Materials and Methods
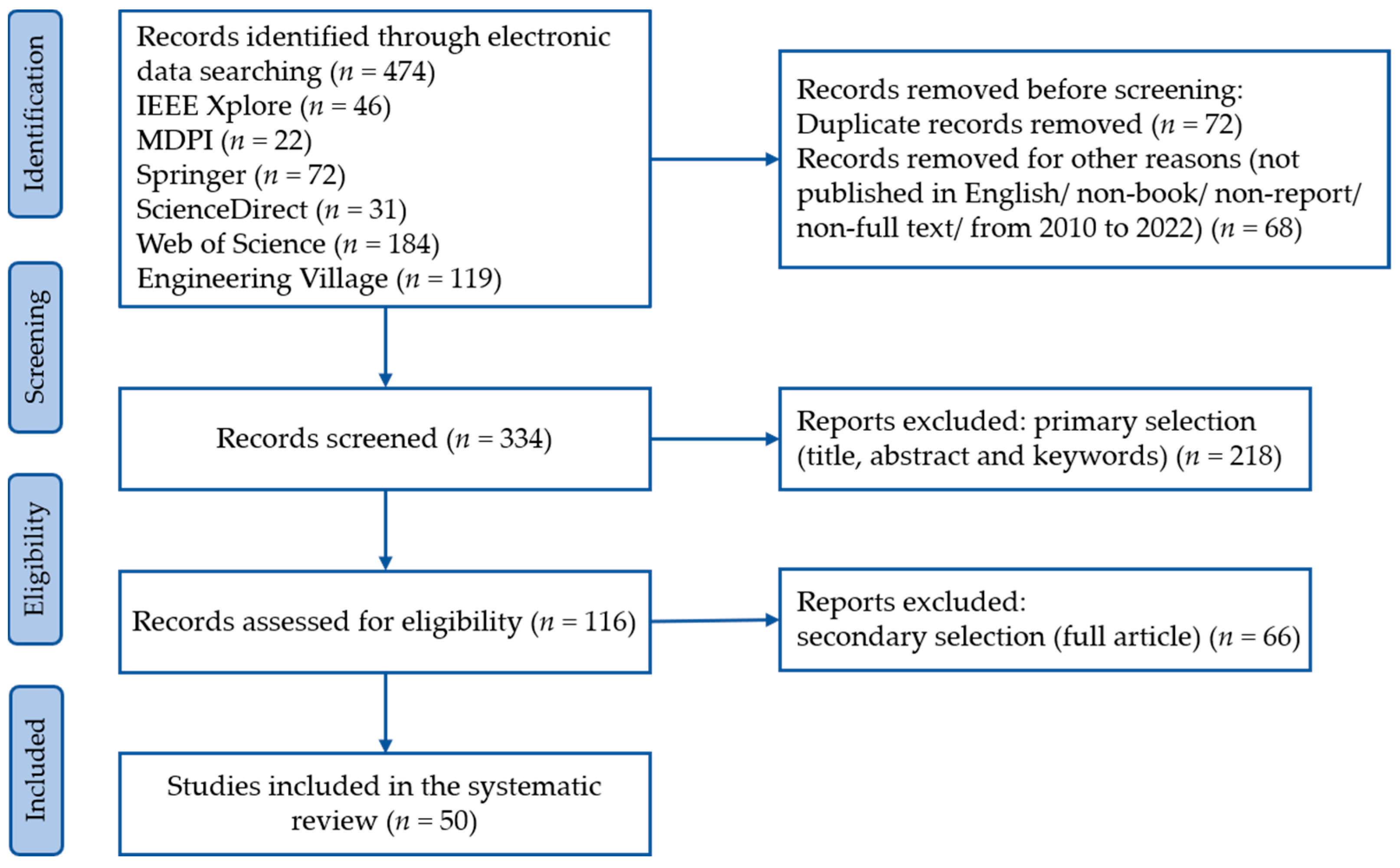
2.1. Search Strategy
2.2. Search Criteria
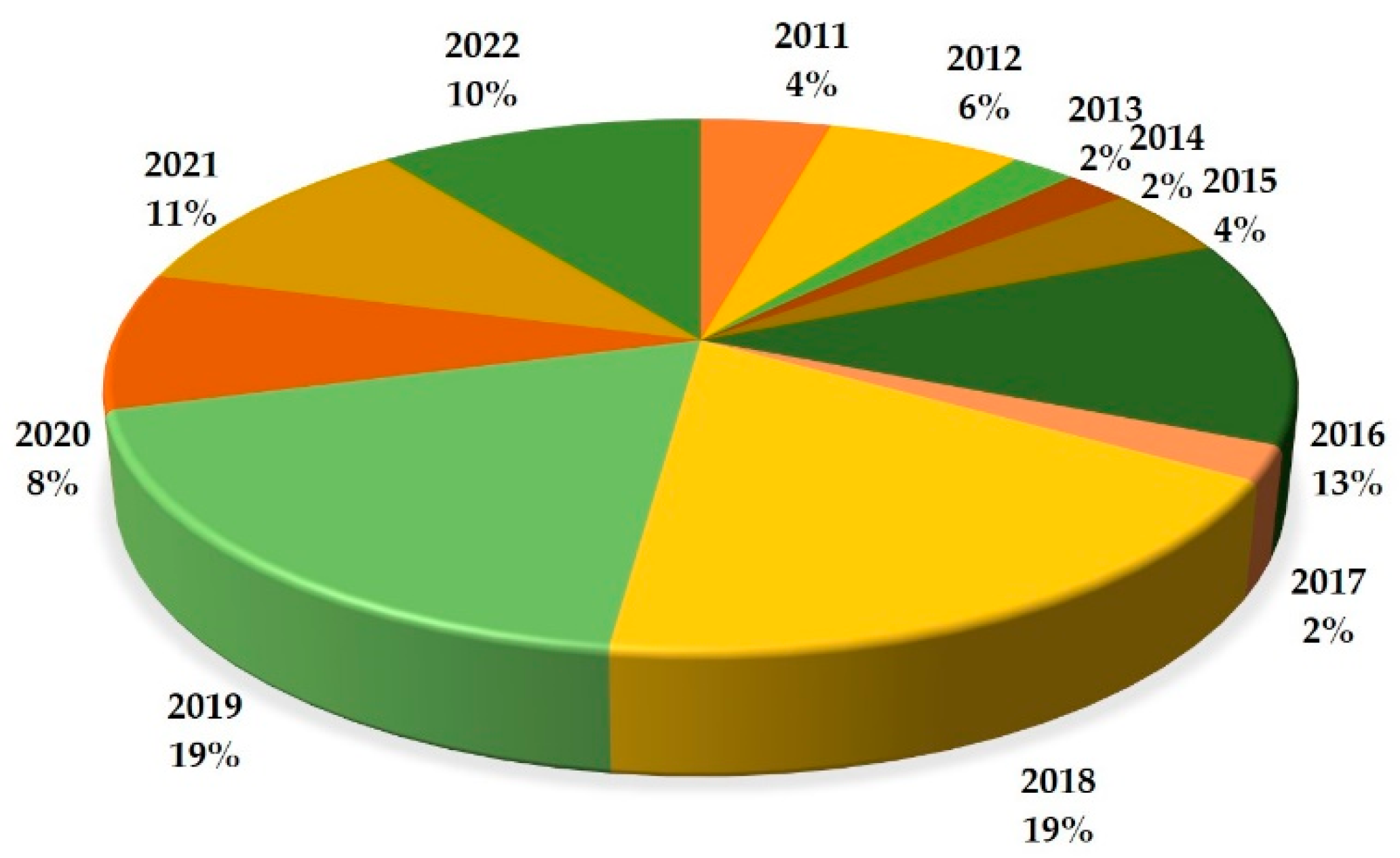
2.3. Data Extraction
3. Development of Rubber Tapping Machines
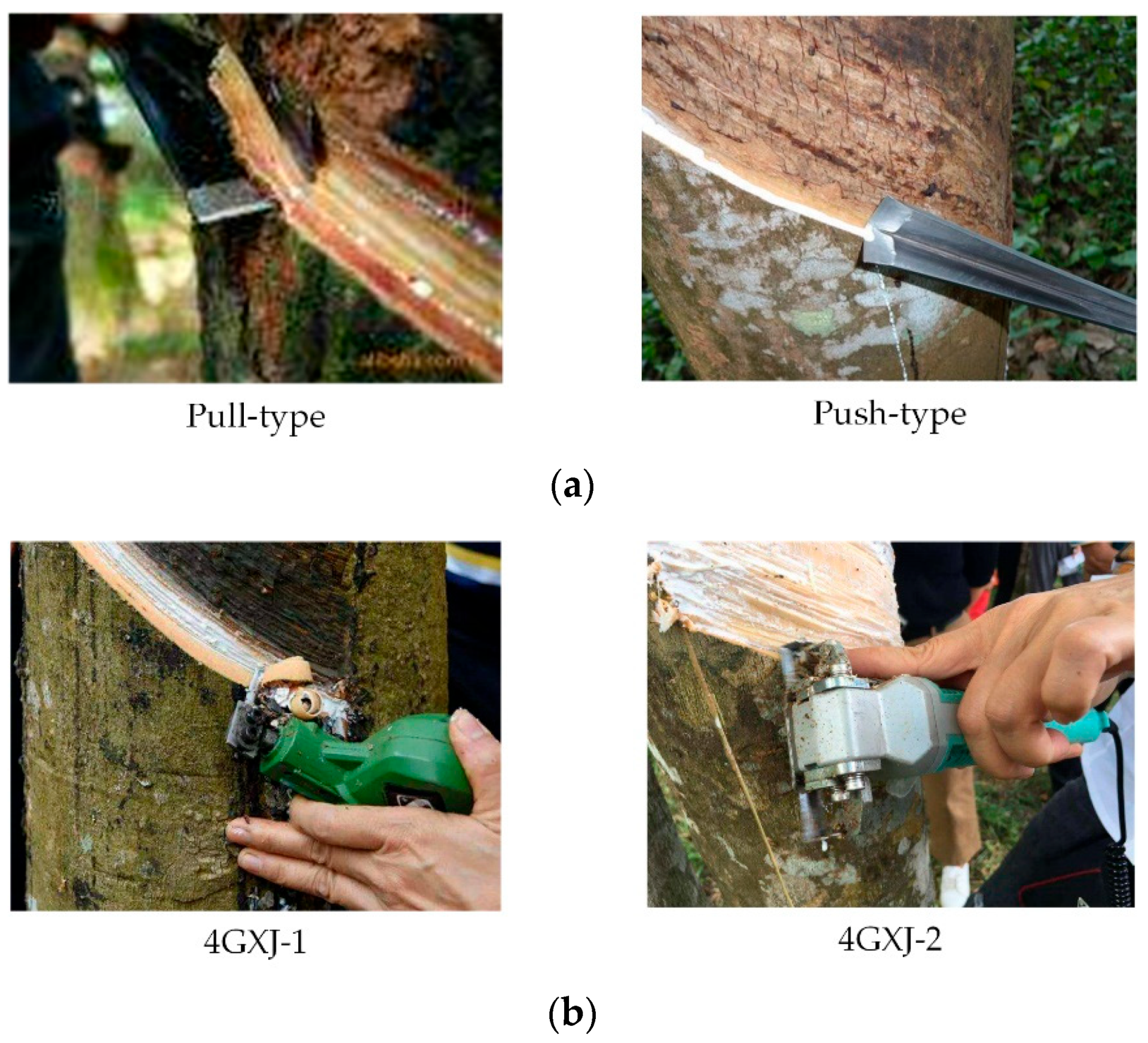
3.1. Manual Tapping Machine
3.2. Fixed Tapping Machine
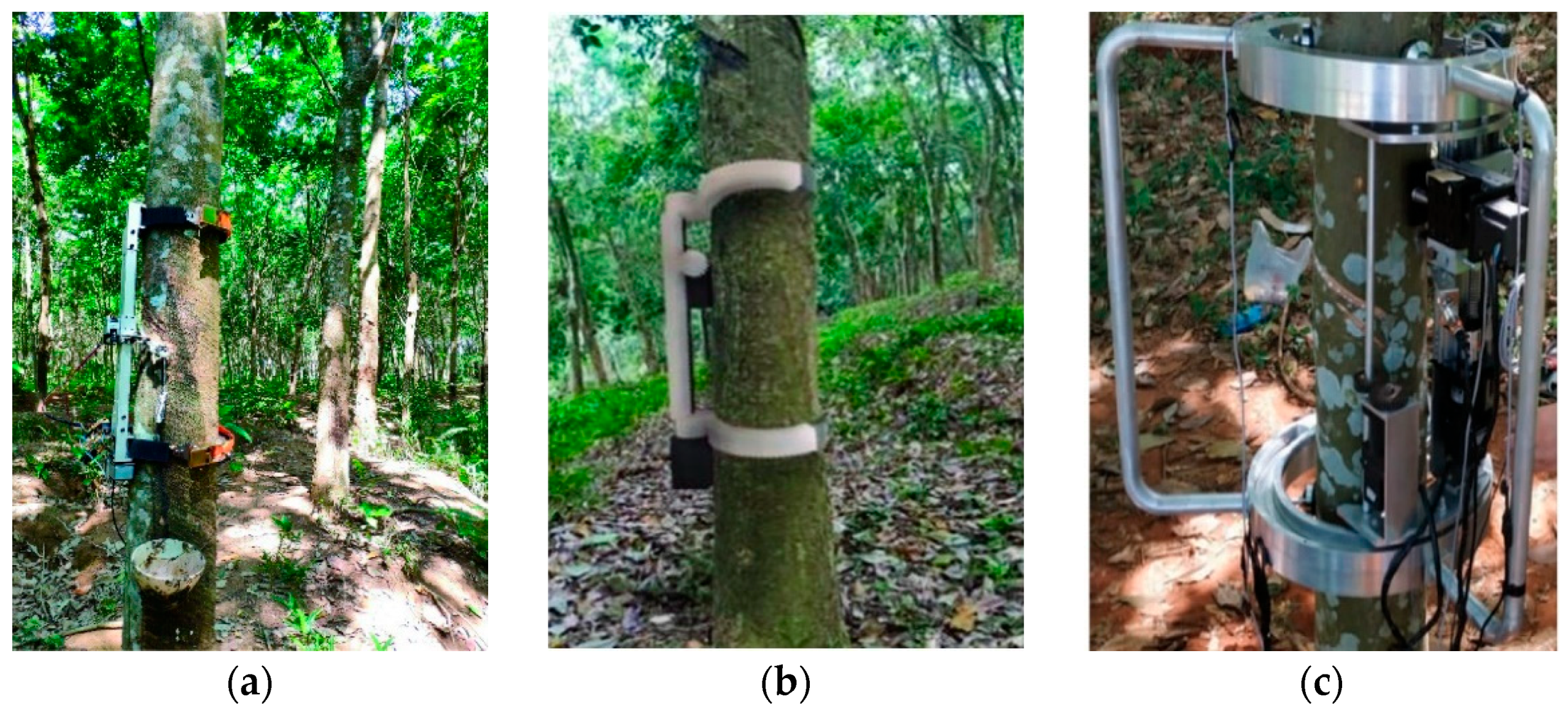
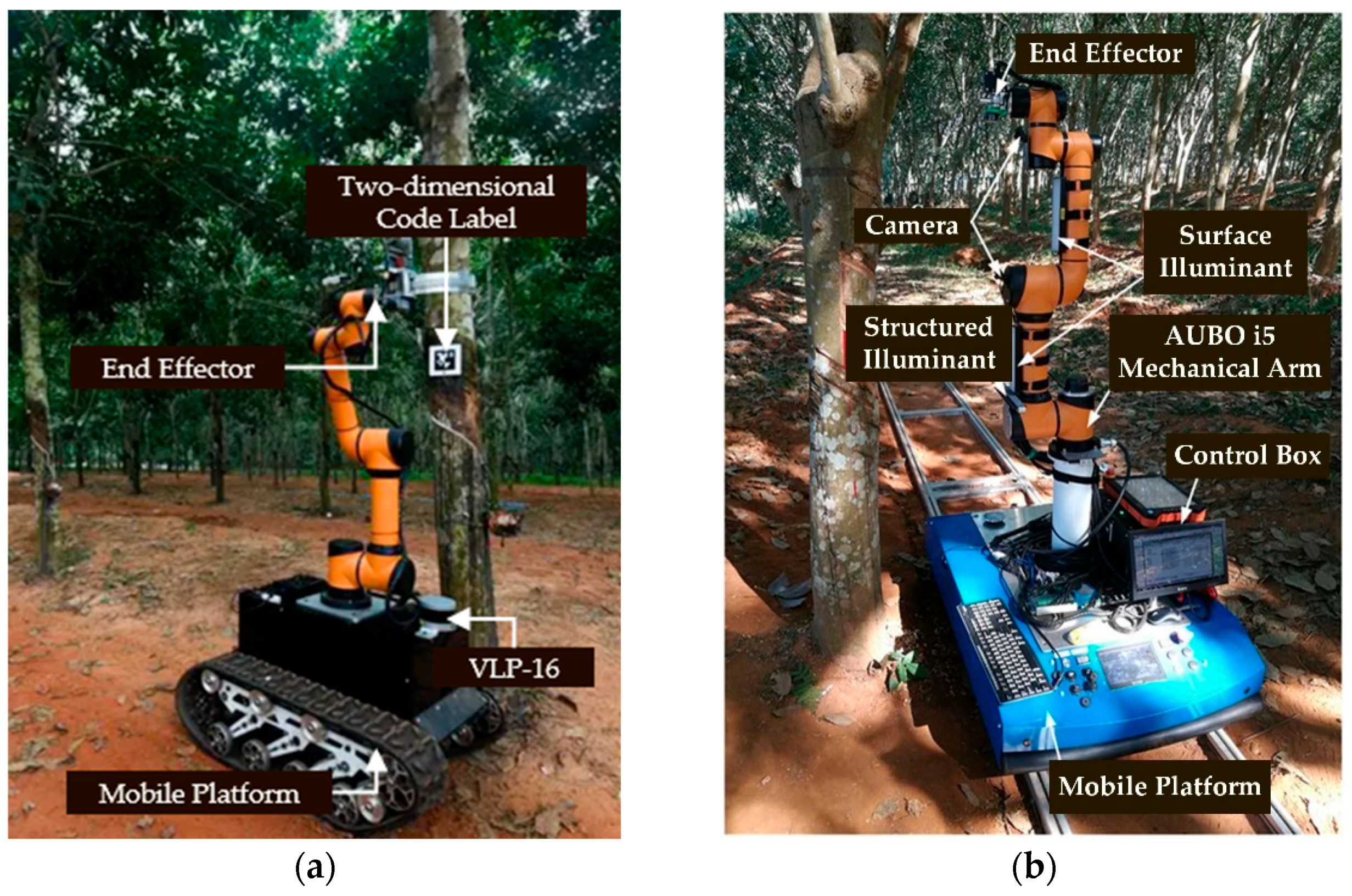
3.3. Self-Propelled Rubber Tapping Robot
4. Rubber Tapping Technology
- (1)
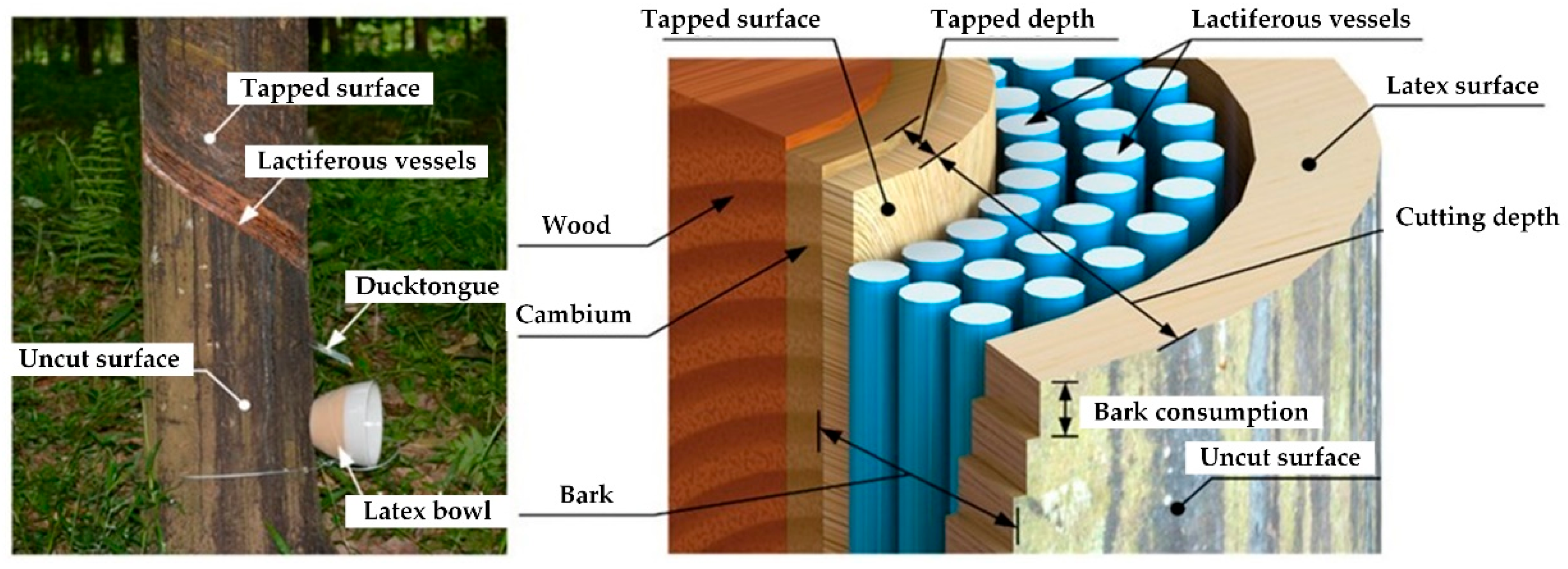
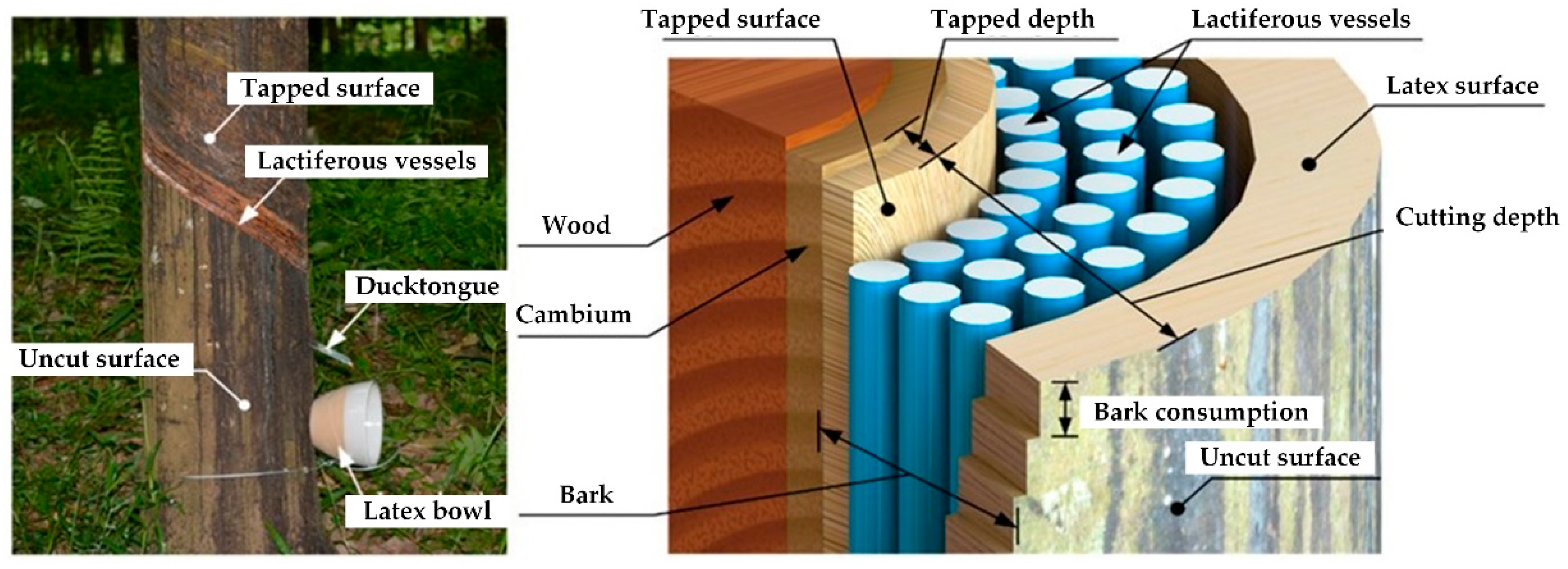
- An accurate tapping track: because of the spiral shape used, it is necessary that the tapping tool can move according to the specified precise track. Moreover, to realize automatic rubber tapping and save cost, the mechanical parts for rubber tapping should be simplified.
- (2)
- A controllable tapping depth: excessively deep rubber tapping will cause damage to the tree body, and excessively shallow tapping will affect the yield of rubber, so it is necessary to design a device that can ensure that a uniform detection and limit depth are maintained each time rubber tapping is carried out.
- (3)
- Reasonable bark consumption: too much consumption of bark will shorten the total tapping cycle, and too little will reduce the latex yield. Therefore, on the premise of ensuring the lactation tube, the amount of skin consumed in a single tap should be reduced as far as possible.
- (4)
- A stable profiling mechanism: as a rubber tree is not an ideal ellipse, it is necessary to design a copying device to make the laticifer partition more even.
4.1. Manual Tapping
4.2. Semi-Automatic Tapping with Fixed Machine
4.3. Automatic Tapping with Self-Propelled Robot
4.3.1. Obstacle Information Perception and Path Planning
4.3.2. Recognition of Natural Rubber Trees and Tapping Lines
5. Conclusions and Future Trends
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper ID | Information Extraction and Future Work | Category | Year |
|---|---|---|---|
| S01 [72] | The topic of a machine which can autonomously navigate rubber plantations with obstacle detection capabilities was raised in the conference. | Navigation in rubber plantations | 2010 |
| S02 [50] | Based on different methods and principles, stability analyses of 25 superior rubber genotypes showed agreement, indicating stable genotypes. The study was backed up by ample data. | Protective research in traditional manual tapping period | 2011 |
| S03 [32] | An innovative tapping system, the double-cut alternative, to improve the yield of Hevea brasiliensis. | Innovative rubber tapping method | 2011 |
| S04 [49] | In this study, a two-stage field experiment was conducted to evaluate a wide range of low-intensity harvesting systems based on ethephon stimulation and the extension and application of this method was proposed. | Innovative rubber tapping method | 2012 |
| S05 [96] | In this paper, a self-supervised sensing approach was introduced in an attempt to robustly identify a drivable terrain surface for robots operating in forested terrain. The sensing system employed both Lidar and vision sensor data. | Tree trunk detection for navigation | 2012 |
| S06 [54] | This study showed that tapping panel diagnosis, used as a decision support tool, can increase remaining tapping years. The method formalized here will be a useful support for the innovating tapping management schemes. | Protective research in traditional manual tapping period | 2012 |
| S07 [13] | In this paper, ergonomic factors related to low back pain in rubber tappers was defined. The study aimed to evaluate the prevalence of musculoskeletal disorders. | Protective research in traditional manual tapping period | 2012 |
| S08 [55] | This work proved that the use of ultrasound technology, an innovative stimulation technique, as a preprocess on the tapping cut surface of the rubber trees could increase latex and dry rubber yields. | Innovative rubber tapping method | 2013 |
| S09 [98] | Compared the difference between tapped and untapped trees to find whether tapping operations had an influence on hevea rubber trees. | Protective research in traditional manual tapping period | 2013 |
| S10 [99] | Identifying pathogenicity genes in the rubber tree anthracnose fungus colletotrichum gloeosporioides through random insertional mutagenesis. | Protective research of plant disease control | 2013 |
| S11 [100] | Studied the regulation of MIR genes during latex harvesting and TPD. | Protective research | 2013 |
| S12 [53] | The authors of this study selected Hevea brasiliensis as their research object. The low-frequency tapping experiment proved that, compared with the standard tapping technique, low-frequency tapping technology could make up for the shortage of tapping labor in rubber cultivation. | Optimized latex harvesting technologies | 2014 |
| S13 [101] | Reviewed and collected the problem of stem and root-rot disease problems in rubber plantations. Obtained management strategies based on successes and failures. | Rubber-tapping-related work | 2014 |
| S14 [48] | This study set out to assess biochemical and histological changes, as well as changes in gene expression, in latex and phloem tissues from trees grown under various harvesting systems. The predicted function for some ethylene response factor genes suggested that some candidate genes play an important role in regulating susceptibility to TPD. | Protective research in tapping operations | 2015 |
| S15 [52] | This paper discussed a semi-automatic rubber tapping machine which was a battery-powered tool with a specially designed cutting blade and guide mechanism, supported by a sensory system which assisted the operator in performing tapping of the required quality and standards on all trees in a plantation. | Portable electrical tapping device | 2016 |
| S16 [5] | Questionnaires were administered to rubber tappers to measure musculoskeletal disorders (MSDs) and potential associated factors. The tests showed that MSDs were common among rubber tappers. | Protective research for rubber tappers | 2016 |
| S17 [71] | This paper presented a novel tree trunk detection algorithm that used the Viola and Jones detector, along with a proposed preprocessing method, combined with tree trunk detection using depth information. | Tree trunk detection for a self-propelled rubber tapping robot | 2016 |
| S18 [94] | This paper described a method of monocular visual recognition to help small vehicles navigate between narrow rows. | Navigation technology | 2016 |
| S19 [69] | This paper merged fuzzy visual serving and GPS-based planning to obtain the proper navigation behavior for a small crop-inspection robot. | Navigation technology | 2016 |
| S20 [102] | Annual growth increment and stability of rubber yields in the tapping phase in rubber tree clones. The results showed that annual girth growth occurred at the expense of rubber yields. | Protective research for rubber trees | 2016 |
| S21 [33] | This paper presented the design of an intelligent rubber tapping technology evaluation equipment based on a cloud model. | Assessment of tapping level | 2017 |
| S22 [103] | Bacillus subtilis B1 was shown to have potential biological control ability against various mildew, decay, and stain fungi in rubber trees. | Protective research of plant disease control | 2018 |
| S23 [51] | A portable electrical tapping device was designed in this paper. The method of image processing was used to verify the bark consumption of the electric tapping machine. | Portable electrical tapping device | 2018 |
| S24 [76] | This study aimed to develop a model of a vision mapping system which was suitable for rubber tree plantations based on a common farming platform in Thailand. | Tree trunk detection for a self-propelled rubber tapping robot | 2018 |
| S25 [86] | The authors developed a simple tapped line detection algorithm using the wood color for segmentation and the shape of the tapped area on a rubber tree as the features for recognition via a linear SVM classifier model. | Tapping path detection for a self-propelled rubber tapping robot | 2018 |
| S26 [97] | In this paper, image processing technology was used to separate the secant and latex to avoid interference factors, and obtain the exact secant and latex binary image. By calculating the area ratio of the corresponding binary images, the grade of TPD could be classified accurately. | Tree trunk detection for a self-propelled rubber tapping robot | 2018 |
| S27 [93] | By focusing on the tree canopy and sky of an orchard row, an unmanned ground vehicle was able to extract features that could be used to autonomously navigate through the center of the tree rows. The machine vision algorithm developed in this study showed the potential to guide small utility vehicles in orchards in the future. | Navigation technology for a self-propelled rubber tapping robot | 2018 |
| S28 [104] | The authors observed a correlation between DNA methylation status and rubber yield and related characteristics in Hevea brasiliensis tapped at different heights. They evaluated the effects of tapping-cut heights on rubber yield and related traits. | Protective research of rubber trees | 2018 |
| S29 [87] | This paper presented the detection of rubber tree (Hevea brasiliensis) tapping positions (tapping-paths) and trunk-mounted harvesting cups in RGB-D images, representing the machine vision part of an automatic rubber tapping system. | Tapping path detection for self-propelled tapping robot | 2019 |
| S30 [105] | Using an image segmentation methodology, the ratio of the tapping area to the latex area was calculated to analyze the degree of TPD. | Protective research of rubber trees | 2019 |
| S31 [61] | The design of a flexible rubber tapping tool with settings regalted to depth and thickness control was carried out to increase the productivity of rubber crops in the study region. The treatment was carried out as follows: controlling the depth between 1–1.5 mm of the cambium, keeping the thickness tapping at 1.5–2 mm, and using tilting angles of 35°–60°. | Fixed tapping machine | 2019 |
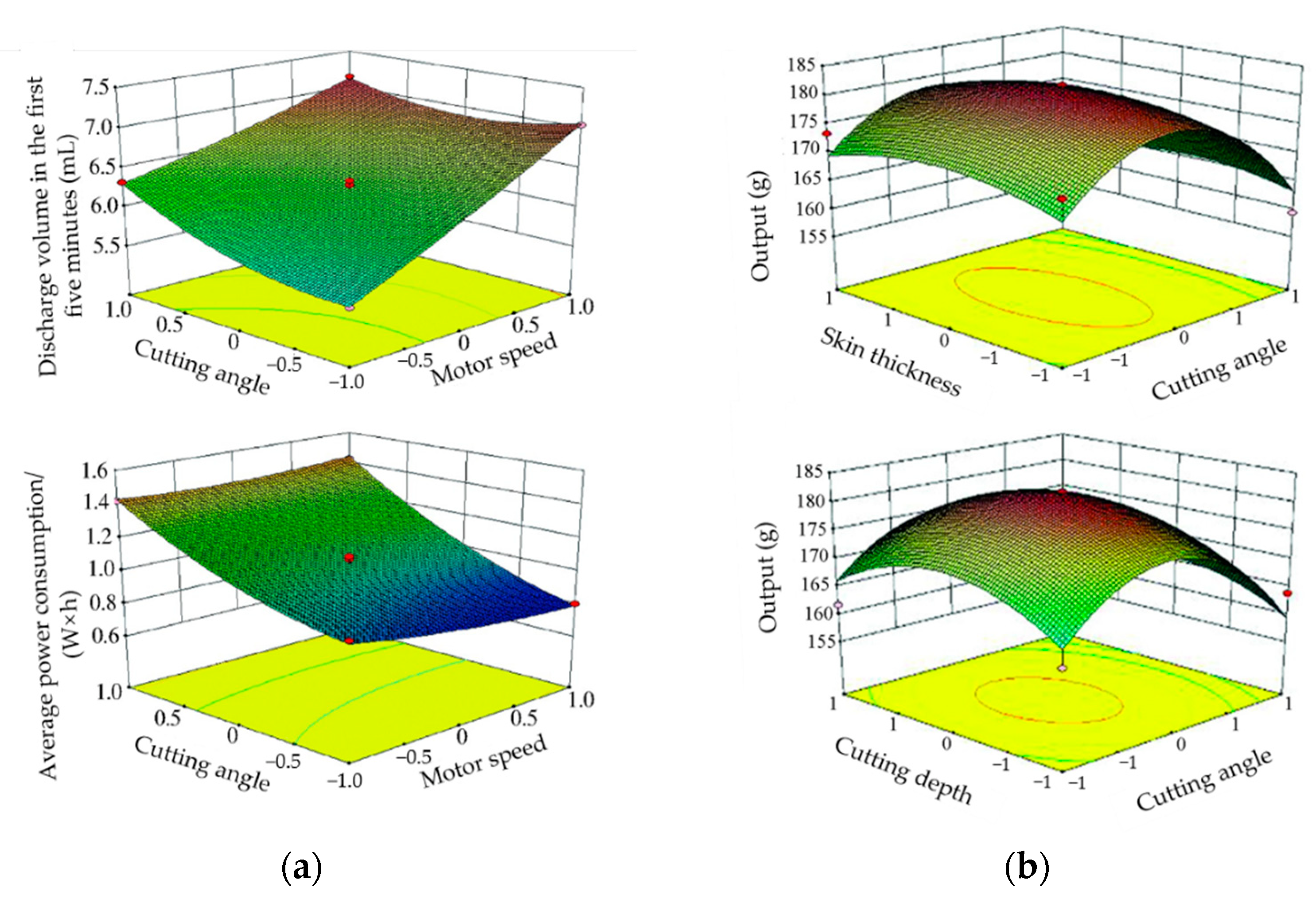
| S32 [68] | A three-coordinate linkage rubber tapping device was designed and tested, and a motion path planning method based on a short tapping cut was proposed. The planning process for the cutting path fused the information of the tapping cut and the cutting depth. Test results showed that the cutting depth was well controlled, with no damage to rubber trees and the error in terms of bark consumption was about 5%. | Fixed tapping machine | 2019 |
| S33 [106] | This paper introduced the progress and frontiers related to tapping technology, and analyzed and summarized the research on semi-automatic tapping machinery and automatic tapping machinery. The 4GXJ-I tapping knife, which is more suitable for industrial markets, was also designed by this team. | Portable electrical tapping device | 2019 |
| S34 [3] | This study summarized the achievements of the past two decades in understanding the biosynthesis of natural rubber. | Protective research for rubber trees | 2019 |
| S35 [73] | The authors made a robot walk along one row at a fixed lateral distance, stop at a fixed point, and turn from one row into another. They discussed a method using a low-cost two-dimensional (2D) Lidar and a gyroscope. | Navigation in rubber plantations | 2019 |
| S36 [74] | The authors investigated an autonomously guided robotic vehicle platform moving along a rubber tree orchard row. The navigation of the autonomous vehicle in a rubber tree orchard was successfully evaluated in terms of the magnitude of errors. | Navigation in rubber plantations | 2019 |
| S37 [56] | The authors proposed an automated rubber tree tapping and latex mixing machine for the high-quality production of natural rubber. During the tapping process, a tapping tool was used to make a depth of 4.0–4.5 mm. | Self-propelled rubber tapping robot | 2020 |
| S38 [17] | This study examined the effect of a high-frequency tapping system on latex yield, biochemistry, and tapping panel dryness (TPD). After conducting experiments in three locations, the results of latex diagnosis showed relatively unhealthy rubber trees as they were impacted by the high-frequency tapping system. The farmer should consider high-frequency tapping and ensure good decision-making in regard to tapping system applications. | Protective work | 2020 |
| S39 [107] | The authors confirmed that there is a correlation between the tapper height, the tapping postures of tappers, and the occurrence of musculoskeletal disorders among tapping workers. | Rubber tapping related work | 2021 |
| S40 [66] | Transmission structure design and motion simulation analysis of a 4GXJ-2 electric rubber cutter. Test results showed that the cutting depth was well controlled, with no damage to rubber trees and the error in terms of bark consumption was about 5%. | Portable electrical tapping device | 2021 |
| S41 [88] | This article presented a near-range machine vision technique for rubber tapping automation that detected the tapping line in near-range images. The authors conducted nighttime rubber tapping line detection in near-range images. Their acquisition tool integrated an RGB-D camera with assisting lights in order to capture images under low-light conditions. | Tapping path detection for a self-propelled tapping robot | 2021 |
| S42 [62] | The authors presented a novel 3-D Lidar SLAM system for rubber tapping robots. The system achieved the same real-time performance as state-of-the-art algorithms even without IMU information. | Navigation in rubber plantations | 2021 |
| S43 [90] | As a representative case, the autonomous mobile robot considered in this work was used to determine the working area and to detect obstacles simultaneously, which was a key feature for its efficient and safe operation. | Obstacle detection for navigation | 2021 |
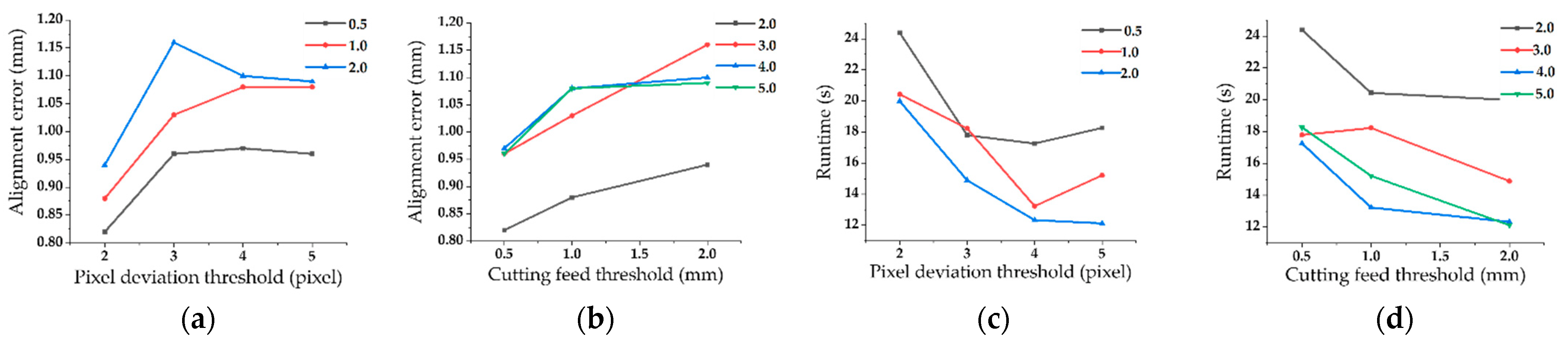
| S44 [108] | The authors recognized the tapped area and untapped area using an improved YOLOv5-based tapping trajectory detection method. | Tapping path detection | 2022 |
| S45 [109] | Leaf hyperspectral reflectance was combined with machine learning algorithms to detect and classify the level of South American Leaf Blight, as well as predicted disease-induced photosynthetic changes in rubber trees. | Rubber-tapping-related work | 2022 |
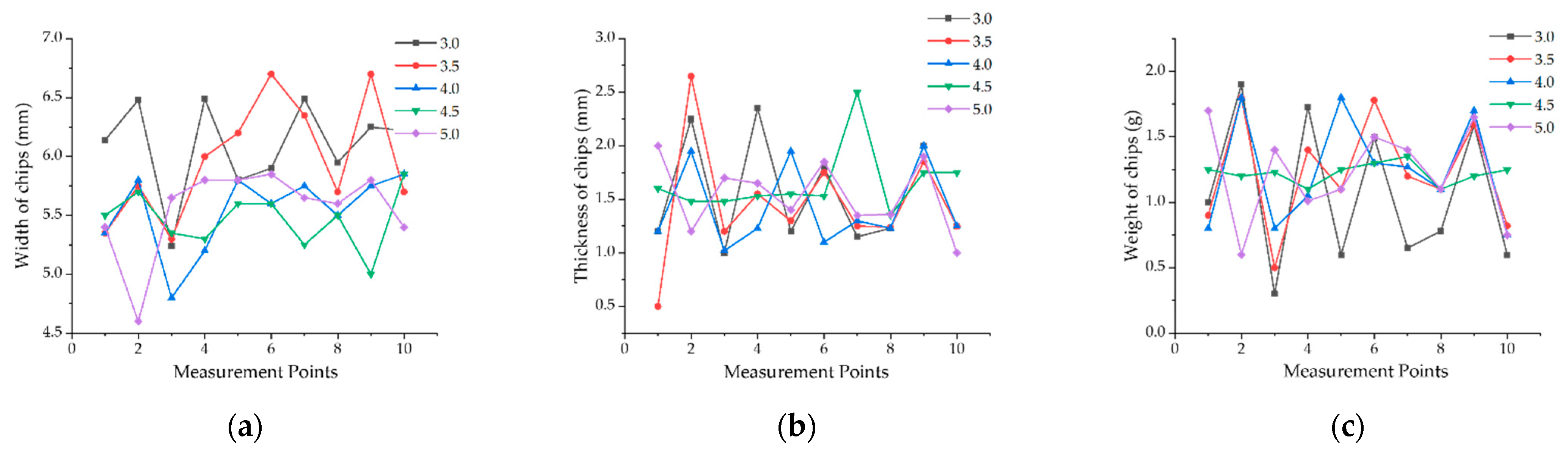
| S46 [18] | The authors presented a rubber tapping robot with a six-axis tandem robot arm and a compact binocular stereo vision system. The bark consumption-cutting depth settings of 2.0 and 5.0 mm were more appropriate for the rubber tapping robot. The authors suggested that future work could include improvements in system stiffness and robustness. | Self-propelled rubber tapping robot | 2022 |
| S47 [110] | The authors designed an intelligent rubber tapping machine (RTM), and investigated whether the structural vibration level was suitable for the real tapping process. | Rubber tapping machine | 2022 |
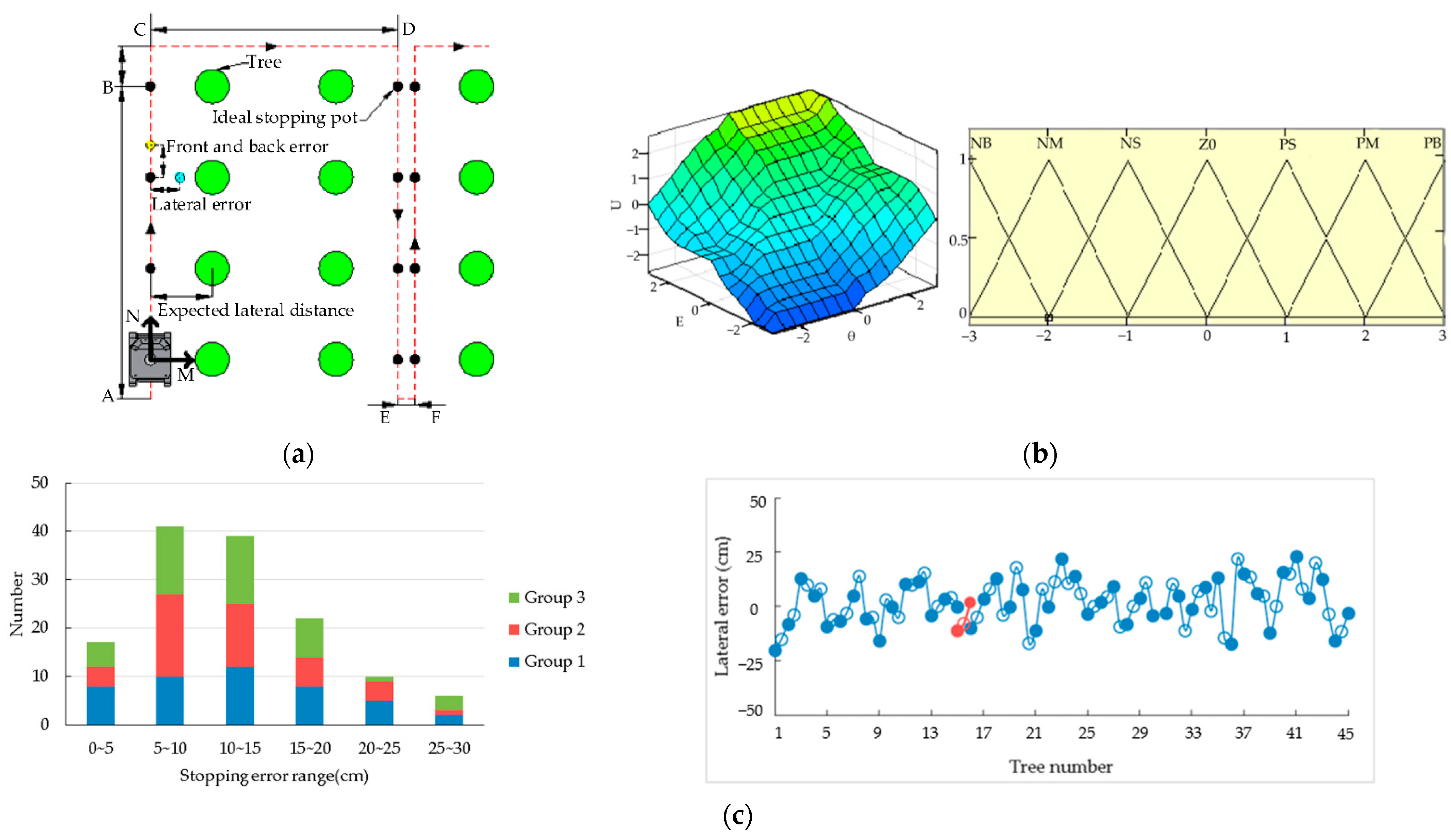
| S48 [111] | A self-propelled rubber tapping robot was proposed that could move along a row of trees according to a predetermined path and tap each rubber tree. | Self-propelled rubber tapping robot | 2022 |
| S49 [112] | This paper used two-dimensional light detection and ranging (Lidar) and a ranging sensor to locate a space position. In the field tests, the lateral error of positioning was less than 8.86 mm, the height error was less than 0.72 mm, and the average harvest rate was 98.18%. | Self-propelled rubber harvesting robot | 2022 |
| S50 [37] | The existing problems and perspectives related to pesticide application sprayers and physical control equipment were summarized in this study. | Protective research of plant disease control | 2022 |
References
- Mikhaylov, I.A.; Sukhareva, K.V.; Andriasyan, Y.O.; Popov, A.A.; Vorontsov, N.V. Mechanochemical Modification of Natural Rubber. In Proceedings of the International Conference on Advanced Materials with Hierarchical Structure for New Technologies and Reliable Structures, Tomsk, Russia, 19–26 September 2016. [Google Scholar]
- Wongsorat, W.; Suppakarn, N.; Jarukumjorn, K. Effects of compatibilizer type and fiber loading on mechanical properties and cure characteristics of sisal fiber/natural rubber composites. J. Compos. Mater. 2014, 48, 2401–2411. [Google Scholar] [CrossRef]
- Men, X.; Wang, F.; Chen, G.Q.; Zhang, H.B.; Xian, M. Biosynthesis of Natural Rubber: Current State and Perspectives. Int. J. Mol. Sci. 2019, 20, 50. [Google Scholar] [CrossRef] [PubMed]
- Ye, S.; Rogan, J.; Sangermano, F. Monitoring rubber plantation expansion using Landsat data time series and a Shapelet-based approach. ISPRS J. Photogramm. Remote Sens. 2018, 136, 134–143. [Google Scholar] [CrossRef]
- Stankevitz, K.; Schoenfisch, A.; de Silva, V.; Tharindra, H.; Stroo, M.; Ostbye, T. Prevalence and risk factors of musculoskeletal disorders among Sri Lankan rubber tappers. Int. J. Occup. Environ. Health 2016, 22, 91–98. [Google Scholar] [CrossRef] [PubMed]
- Deng, X.M.; Guo, D.; Yang, S.G.; Shi, M.J.; Chao, J.Q.; Li, H.L.; Peng, S.Q.; Tian, W.M. Jasmonate signalling in the regulation of rubber biosynthesis in laticifer cells of rubber tree, Hevea brasiliensis. J. Exp. Bot. 2018, 69, 3559–3571. [Google Scholar] [CrossRef]
- Qi, D.; Zhou, J.; Xie, G.; Wu, Z.X. Optimizing Tapping-Tree Density of Rubber (Hevea brasiliensis) Plantations in South China. Small-Scale For. 2016, 15, 61–72. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, C.; Zhang, J.; Yuan, T.; Li, W.; Wang, D.; Zhang, F. Design and experiment of suspension-typed rubber tapping device. Int. Agric. Eng. J. 2018, 27, 110–118. [Google Scholar]
- Ali, H.; Davies, D.R. The effects of age, sex and tenure on the job performance of rubber tappers. J. Occup. Organ. Psychol. 2003, 76, 381–391. [Google Scholar] [CrossRef]
- Ali, M.F.; Abdul Aziz, A.; Williams, A. Assessing Yield and Yield Stability of Hevea clones in the Southern and Central Regions of Malaysia. Agronomy 2020, 10, 643. [Google Scholar] [CrossRef]
- Yu, H.Y.; Hammond, J.; Ling, S.H.; Zhou, S.X.; Mortimer, P.E.; Xu, J.C. Greater diurnal temperature difference, an overlooked but important climatic driver of rubber yield. Ind. Crops Prod. 2014, 62, 14–21. [Google Scholar] [CrossRef]
- An, F.; Lin, W.F.; Cahill, D.; Rookes, J.; Kong, L.X. Variation of phloem turgor pressure in Hevea brasiliensis: An implication for latex yield and tapping system optimization. Ind. Crops Prod. 2014, 58, 182–187. [Google Scholar] [CrossRef]
- Meksawi, S.; Tangtrakulwanich, B.; Chongsuvivatwong, V. Musculoskeletal problems and ergonomic risk assessment in rubber tappers: A community-based study in southern Thailand. Int. J. Ind. Ergon. 2012, 42, 129–135. [Google Scholar] [CrossRef]
- Turjanmaa, K.; Alenius, H.; Reunala, T.; Palosuo, T. Recent developments in latex allergy. Curr. Opin. Allergy Clin. Immunol. 2002, 2, 407–412. [Google Scholar] [CrossRef]
- Han, P.P.; Chen, J.S.; Han, Y.; Yi, L.; Zhang, Y.N.; Jiang, X.L. Monitoring rubber plantation distribution on Hainan Island using Landsat OLI imagery. Int. J. Remote Sens. 2018, 39, 2189–2206. [Google Scholar] [CrossRef]
- Varghese, A.; Panicker, V. Effect of MSDs and scope of ergonomic interventions among rubber processing workers: A systematic review. Med. Lavoro. 2022, 68, e2022032. [Google Scholar] [CrossRef]
- Rukkhun, R.; Iamsaard, K.; Sdoodee, S.; Mawan, N.; Khongdee, N. Effect of high-frequency tapping system on latex yield, tapping panel dryness, and biochemistry of young hillside tapping rubber. Not. Bot. Horti Agrobot. Cluj-Napoca 2020, 48, 2359–2367. [Google Scholar] [CrossRef]
- Zhou, H.; Zhang, S.; Zhang, J.; Zhang, C.; Wang, S.; Zhai, Y.; Li, W. Design, development, and field evaluation of a rubber tapping robot. J. Field Robot. 2022, 39, 28–54. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, D.; Zhu, D.; Zhang, L.; Zan, X.; Tong, L. Advances and prospects in fine recognition and automatic mapping of crops by remote sensing. Trans. Chin. Soc. Agric. Mach. 2018, 49, 1–12. [Google Scholar] [CrossRef]
- Said, M.E.; Belal, A.; Kotb, A.-E.S.; El-Shirbeny, M.A.; Gad, A.; Zahran, M.B. Smart farming for improving agricultural management. Egypt. J. Remote Sens. Space Sci. 2021, 24, 971–981. [Google Scholar] [CrossRef]
- Boursianis, A.D.; Papadopoulou, M.S.; Diamantoulakis, P.; Liopa-Tsakalidi, A.; Barouchas, P.; Salahas, G.; Karagiannidis, G.; Wan, S.; Goudos, S.K. Internet of Things (IoT) and Agricultural Unmanned Aerial Vehicles (UAVs) in smart farming: A comprehensive review. Internet Things 2020, 18, 100187. [Google Scholar] [CrossRef]
- He, B.; Bai, K.J. Digital twin-based sustainable intelligent manufacturing: A review. Adv. Manuf. 2021, 9, 1–21. [Google Scholar] [CrossRef]
- Zhou, G.H.; Zhang, C.; Li, Z.; Ding, K.; Wang, C. Knowledge-driven digital twin manufacturing cell towards intelligent manufacturing. Int. J. Prod. Res. 2020, 58, 1034–1051. [Google Scholar] [CrossRef]
- Ningbo CIHEVEA Technology Co., Ltd. Available online: http://www.cihevea.com/ (accessed on 2 July 2022).
- Lan, Y.; Zhao, D.; Zhang, Y.; Zhu, J. Exploration and development prospect of ecological unmanned farm model. Trans. Chin. Soc. Agric. Eng. 2021, 37, 312–327. [Google Scholar]
- McMullen, A.I. Extraction of latex of Hevea brasiliensis under sterile conditions. Nature 1949, 164, 715. [Google Scholar] [CrossRef] [PubMed]
- Gouvea, L.R.L.; Silva, G.A.P.; Verardi, C.K.; Silva, J.Q.; Scaloppi, E.J.; Goncalves, P.D. Temporal stability of vigor in rubber tree genotypes in the pre- and post-tapping phases using different methods. Euphytica 2012, 186, 625–634. [Google Scholar] [CrossRef]
- Ramachandran, P.; Mathur, S.; Francis, L.; Varma, A.; Mathew, J.; Mathew, N.M.; Sethuraj, M.R. Evidence for Association of a Viroid with Tapping Panel Dryness Syndrome of Rubber (Hevea brasiliensis). Plant Dis. 2000, 84, 1155. [Google Scholar] [CrossRef]
- Ru, S.; Li, Z.; Liang, D.; Zhang, Y. Design and analysis of track type rubber tapping machine based on Pro/Mechanica. Manuf. Autom. 2019, 41, 48–52. [Google Scholar]
- Wang, X.; Geng, G.; Li, F.; Zhou, X.; Guan, Z. Design of fixed automatic intelligent control rubber tapping machine. Agric. Eng. 2020, 10, 79–84. [Google Scholar]
- Pramchoo, W.; Geater, A.F.; Harris-Adamson, C.; Tangtrakulwanich, B. Ergonomic rubber tapping knife relieves symptoms of carpal tunnel syndrome among rubber tappers. Int. J. Ind. Ergon. 2018, 68, 65–72. [Google Scholar] [CrossRef]
- Chantuma, P.; Lacote, R.; Leconte, A.; Gohet, E. An innovative tapping system, the double cut alternative, to improve the yield of Hevea brasiliensis in Thai rubber plantations. Field Crops Res. 2011, 121, 416–422. [Google Scholar] [CrossRef]
- Cheng, J.R.; Cai, K.Q.; Liu, B.Y.; Tang, X.Y. Design and Test of the Intelligent Rubber Tapping Technology Evaluation Equipment Based on Cloud Model. In Cloud Computing and Security; Springer: Cham, Switzerland, 2017; Volume 10602. [Google Scholar] [CrossRef]
- Mitchell, S.; Weersink, A.; Erickson, B. Adoption of precision agriculture technologies in Ontario crop production. Can. J. Plant Sci. 2018, 98, 1384–1388. [Google Scholar] [CrossRef]
- Monaghan, J.M.; Daccache, A.; Vickers, L.H.; Hess, T.M.; Weatherhead, E.K.; Grove, I.G.; Knox, J.W. More ‘crop per drop’: Constraints and opportunities for precision irrigation in European agriculture. J. Sci. Food Agric. 2013, 93, 977–980. [Google Scholar] [CrossRef] [PubMed]
- Gebbers, R.; Adamchuk, V.I. Precision Agriculture and Food Security. Science 2010, 327, 828–831. [Google Scholar] [CrossRef]
- Wang, S.L.; Xu, T.; Li, X. Development Status and Perspectives of Crop Protection Machinery and Techniques for Vegetables. Horticulturae 2022, 8, 166. [Google Scholar] [CrossRef]
- Yang, J.; Chen, S.-W.; Zhang, B.; Tu, Q.; Wang, J.; Yuan, M.-S. Non-biological fluorescent chemosensors for pesticides detection. Talanta 2022, 240, 123200. [Google Scholar] [CrossRef]
- Zhang, C.L.; Valente, J.; Kooistra, L.; Guo, L.F.; Wang, W.S. Orchard management with small unmanned aerial vehicles: A survey of sensing and analysis approaches. Precis. Agric. 2021, 22, 2007–2052. [Google Scholar] [CrossRef]
- Farber, C.; Mahnke, M.; Sanchez, L.; Kurouski, D. Advanced spectroscopic techniques for plant disease diagnostics. A review. Trac-Trends Anal. Chem. 2019, 118, 43–49. [Google Scholar] [CrossRef]
- Huang, Y.B.; Chen, Z.X.; Yu, T.; Huang, X.Z.; Gu, X.F. Agricultural remote sensing big data: Management and applications. J. Integr. Agric. 2018, 17, 1915–1931. [Google Scholar] [CrossRef]
- Carrow, R.N.; Krum, J.M.; Flitcroft, I.; Cline, V. Precision turfgrass management: Challenges and field applications for mapping turfgrass soil and stress. Precis. Agric. 2010, 11, 115–134. [Google Scholar] [CrossRef]
- Huang, Y.B.; Reddy, K.N.; Fletcher, R.S.; Pennington, D. UAV Low-Altitude Remote Sensing for Precision Weed Management. Weed Technol. 2018, 32, 2–6. [Google Scholar] [CrossRef]
- Afsah-Hejri, L.; Akbari, E.; Toudeshki, A.; Homayouni, T.; Alizadeh, A.; Ehsani, R. Terahertz spectroscopy and imaging: A review on agricultural applications. Comput. Electron. Agric. 2020, 177, 105628. [Google Scholar] [CrossRef]
- Quy, V.K.; Hau, N.V.; Anh, D.V.; Quy, N.M.; Ban, N.T.; Lanza, S.; Randazzo, G.; Muzirafuti, A. IoT-Enabled Smart Agriculture: Architecture, Applications, and Challenges. Appl. Sci. 2022, 12, 3396. [Google Scholar] [CrossRef]
- Moher, D.; Liberati, A.; Tetzlaff, J.; Altman, D.G.; Grp, P. Preferred Reporting Items for Systematic Reviews and Meta-Analyses: The PRISMA Statement (Reprinted from Annals of Internal Medicine). Phys. Ther. 2009, 89, 873–880. [Google Scholar] [CrossRef]
- Pavel, M.I.; Tan, S.Y.; Abdullah, A. Vision-Based Autonomous Vehicle Systems Based on Deep Learning: A Systematic Literature Review. Appl. Sci. 2022, 12, 6831. [Google Scholar] [CrossRef]
- Putranto, R.A.; Herlinawati, E.; Rio, M.; Leclercq, J.; Piyatrakul, P.; Gohet, E.; Sanier, C.; Oktavia, F.; Pirrello, J.; Montoro, P. Involvement of Ethylene in the Latex Metabolism and Tapping Panel Dryness of Hevea brasiliensis. Int. J. Mol. Sci. 2015, 16, 17885–17908. [Google Scholar] [CrossRef]
- Rodrigo, V.H.L.; Kudaligama, K.; Fernando, K.; Yapa, P.A.J. Replacing traditional half spiral cut by a quarter cut with Ethephon; a simple approach to solve current issues related to latex harvesting in rubber industry. J. Natl. Sci. Found. Sri Lanka 2012, 40, 283–291. [Google Scholar] [CrossRef]
- Gouvea, L.R.L.; Silva, G.A.P.; Scaloppi, E.J.; Goncalves, P.D. Different methods to assess yield temporal stability in rubber. Pesqui. Agropecu. Bras. 2011, 46, 491–498. [Google Scholar] [CrossRef]
- Zhang, C.; Sheng, X.; Zhang, S.; Zhang, F.; Zhang, W.; Zhang, J.; Yuan, T.; Zhang, S.; Yong, L.; Li, W. Design and experiment of portable electric tapping machine. In Proceedings of the ASABE 2018 Annual International Meeting, Detroit, MI, USA, 29 July–1 August 2018; American Society of Agricultural and Biological Engineers (ASABE): St. Joseph, MI, USA, 2018. [Google Scholar] [CrossRef]
- Arjun, R.N.; Soumya, S.J.; Vishnu, R.S.; Bhavani, R.R. Semi Automatic Rubber Tree Tapping Machine. In Proceedings of the 2016 International Conference on Robotics and Automation for Humanitarian Applications (RAHA), Amritapuri, India, 18–20 December 2016; pp. 92–96. [Google Scholar]
- Atsin, G.J.O.; Soumahin, E.F.; Kouakou, H.T.; Coulibaly, L.F.; Traore, S.M.; Alle, J.Y.; N’Guessan, A.E.B.; Kouame, C.; Obouayeba, S. Impact of Reduced Tapping Frequency on Agronomic, Physiological and Biochemical Aspects of Clone PB 260 of Hevea brasiliensis in the Centre West of Cote D’Ivoire. J. Rubber Res. 2014, 17, 45–56. [Google Scholar]
- Michels, T.; Eschbach, J.M.; Lacote, R.; Benneveau, A.; Papy, F. Tapping panel diagnosis, an innovative on-farm decision support system for rubber tree tapping. Agron. Sustain. Dev. 2012, 32, 791–801. [Google Scholar] [CrossRef]
- She, F.H.; Zhu, D.M.; Kong, L.X.; Wang, J.; An, F.; Lin, W.F. Ultrasound-assisted tapping of latex from Para rubber tree Hevea brasiliensis. Ind. Crops Prod. 2013, 50, 803–808. [Google Scholar] [CrossRef]
- Deepthi, S.R.; Dsouza, R.M.D.; Shri, K.A. Automated Rubber tree tapping and latex mixing machine for quality production of natural rubber. In Proceedings of the 2020 IEEE-HYDCON International Conference on Engineering in the 4th Industrial Revolution, Hyderabad, India, 11–12 September 2020. [Google Scholar] [CrossRef]
- Gao, K.; Sun, J.; Gao, F.; Jiao, J. Tapping error analysis and precision control of fixed tapping robot. Nongye Gongcheng Xuebao Trans. Chin. Soc. Agric. Eng. 2021, 37, 44–50. [Google Scholar] [CrossRef]
- Ning, T.; Liang, D.; Zhang, Y.; Fu, W.; Ru, S. Design and experimental research of fixed compound motion track rubber tapping machine. J. Southwest Univ. 2022, 44, 100–109. [Google Scholar] [CrossRef]
- Zhang, X.; Cao, C.; Zhang, L.; Xing, J.; Liu, J.; Dong, X. Design and experiment of copying advanced natural rubber tapping machine. Trans. Chin. Soc. Agric. Mach. 2022, 53, 99–108. [Google Scholar] [CrossRef]
- The Solution of Intelligent Tapping System. Available online: http://www.haribit.com/index.php?c=show&m=view&id=64 (accessed on 10 August 2022).
- Susanto, H.; Hanif, S.A. The Design of Flexible Rubber Tapping Tool with Settings the Depth and Thickness Control. In Proceedings of the 1st South Aceh International Conference on Engineering and Technology (SAICOET), Politeknik Aceh Selatan, Tapak Tuan, Indonesia, 8–9 December 2018. [Google Scholar]
- Nie, F.; Zhang, W.Y.; Wang, Y.; Shi, Q.H. A Forest 3-D Lidar SLAM System for Rubber-Tapping Robot Based on Trunk Center Atlas. IEEE ASME Trans. Mechatron. 2021. [Google Scholar] [CrossRef]
- Chantuma, P.; Lacointe, A.; Kasemsap, P.; Thanisawanyangkura, S.; Gohet, E.; Clement, A.; Guilliot, A.; Ameglio, T.; Thaler, P. Carbohydrate storage in wood and bark of rubber trees submitted to different level of C demand induced by latex tapping. Tree Physiol. 2009, 29, 1021–1031. [Google Scholar] [CrossRef] [PubMed]
- Kanpanon, N.; Kasemsap, P.; Thaler, P.; Kositsup, B.; Gay, F.; Lacote, R.; Epron, D. Carbon isotope composition of latex does not reflect temporal variations of photosynthetic carbon isotope discrimination in rubber trees (Hevea brasiliensis). Tree Physiol. 2015, 35, 1166–1175. [Google Scholar] [CrossRef] [PubMed]
- Gebelin, V.; Leclercq, J.; Kuswanhadi; Argout, X.; Chaidamsari, T.; Hu, S.N.A.; Tang, C.R.; Sarah, G.; Yang, M.; Montoro, P. The small RNA profile in latex from Hevea brasiliensis trees is affected by tapping panel dryness. Tree Physiol. 2013, 33, 1084–1098. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Xiao, S.; Jia, Q.; Deng, X.; Huang, C.; Zheng, Y. Transmission structure design and motion simulation analysis of 4GXJ-2 Electric rubber cutter. J. Yancheng Inst. Technol. (JCR-SCI) 2021, 34, 24–31. [Google Scholar] [CrossRef]
- Cao, J.; Zhang, Y.; Wang, W.; Xiao, S.; Wu, S.; Xiao, H. Research on portable tapping machine for natural rubber harvesting. J. Chin. Agric. Mech. 2020, 41, 20–27. [Google Scholar] [CrossRef]
- Zhang, C.; Li, D.; Zhang, S.; Shui, Y.; Tan, Y.; Li, W. Design and experiment of 3-coordinate linkage rubber cutting device based on laser ranging. Trans. Chin. Soc. Agric. Mach. 2019, 50, 121–127. [Google Scholar]
- Bengochea-Guevara, J.M.; Conesa-Munoz, J.; Andujar, D.; Ribeiro, A. Merge Fuzzy Visual Servoing and GPS-Based Planning to Obtain a Proper Navigation Behavior for a Small Crop-Inspection Robot. Sensors 2016, 16, 276. [Google Scholar] [CrossRef] [PubMed]
- He, W.; Li, Z.J.; Chen, C.L.P. A Survey of Human-centered Intelligent Robots: Issues and Challenges. IEEE-CAA J. Autom. Sin. 2017, 4, 602–609. [Google Scholar] [CrossRef]
- Juman, M.A.; Wong, Y.W.; Rajkumar, R.K.; Goh, L.J. A novel tree trunk detection method for oil-palm plantation navigation. Comput. Electron. Agric. 2016, 128, 172–180. [Google Scholar] [CrossRef]
- Simon, S. Autonomous navigation in rubber plantations. In Proceedings of the ICMLC 2010—The 2nd International Conference on Machine Learning and Computing, Bangalore, India, 9–11 February 2010; pp. 309–312. [Google Scholar] [CrossRef]
- Zhang, C.L.; Yong, L.Y.; Chen, Y.; Zhang, S.L.; Ge, L.Z.; Wang, S.; Li, W. A Rubber-Tapping Robot Forest Navigation and Information Collection System Based on 2D LiDAR and a Gyroscope. Sensors 2019, 19, 2136. [Google Scholar] [CrossRef] [PubMed]
- Kunghun, W.; Tantrapiwat, A.; Chaidilokpattanakul, P. Navigation of autonomous vehicle for rubber tree orchard. In Proceedings of the 5th International Conference on Engineering, Applied Sciences and Technology (ICEAST), Luang Prabang, Laos, 2–5 July 2019. [Google Scholar]
- Terentev, A.; Dolzhenko, V.; Fedotov, A.; Eremenko, D. Current State of Hyperspectral Remote Sensing for Early Plant Disease Detection: A Review. Sensors 2022, 22, 757. [Google Scholar] [CrossRef]
- Kunghun, W.; Tantrapiwat, A. Development of a vision based mapping in rubber tree orchard. In Proceedings of the ICEAST 2018—4th International Conference on Engineering, Applied Sciences and Technology: Exploring Innovative Solutions for Smart Society, Phuket, Thailand, 4–7 July 2018. [Google Scholar] [CrossRef]
- Tsai, C.-C.; Huang, H.-C.; Chan, C.-K. Parallel Elite Genetic Algorithm and Its Application to Global Path Planning for Autonomous Robot Navigation. IEEE Trans. Ind. Electron. 2011, 58, 4813–4821. [Google Scholar] [CrossRef]
- Liu, L.; Yao, J.; He, D.; Chen, J.; Huang, J.; Xu, H.; Wang, B.; Guo, J. Global Dynamic Path Planning Fusion Algorithm Combining Jump-A* Algorithm and Dynamic Window Approach. IEEE Access 2021, 9, 19632–19638. [Google Scholar] [CrossRef]
- Kobayashi, M.; Motoi, N. Local Path Planning Method Based on Virtual Manipulators and Dynamic Window Approach for a Wheeled Mobile Robot. In Proceedings of the 2021 IEEE/SICE International Symposium on System Integration (SII), Iwaki, Japan, 11–14 January 2021; pp. 499–504. [Google Scholar] [CrossRef]
- Ling, F.; Du, C.; Chen, J.; Yuan, Z. An Improved Geometrical Path Planning Algorithm for UAV in Irregular-obstacle Environment. In Proceedings of the 2019 IEEE 8th Joint International Information Technology and Artificial Intelligence Conference (ITAIC 2019), Chongqing, China, 24–26 May 2019; pp. 972–976. [Google Scholar]
- Lin, P.; Choi, W.Y.; Chung, C.C. Local Path Planning Using Artificial Potential Field for Waypoint Tracking with Collision Avoidance. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020. [Google Scholar]
- Wang, N.; Xu, H. Dynamics-Constrained Global-Local Hybrid Path Planning of an Autonomous Surface Vehicle. IEEE Trans. Veh. Technol. 2020, 69, 6928–6942. [Google Scholar] [CrossRef]
- Tafreshi, F.A.; Fatahi, Z.; Ghasemi, S.F.; Taherian, A.; Esfandiari, N. Ultrasensitive fluorescent detection of pesticides in real sample by using green carbon dots. PLoS ONE 2020, 15, e0230646. [Google Scholar] [CrossRef]
- Khudri, N.A.F.R.; Mohd Masri, M.M.; Maidin, M.S.T.; Kamarudin, N.; Hussain, M.H.; Abd Ghani, I.; Jalinas, J. Preliminary evaluation of acoustic sensors for early detection of red palm weevil, Rhynchophorus ferrugineus incidence on oil palm and coconut in Malaysia. Intern. J. Trop. Insect Sci. 2021, 41, 3287–3292. [Google Scholar] [CrossRef]
- Liu, S.; Atia, M.M.; Karamat, T.B.; Noureldin, A. A LiDAR-Aided Indoor Navigation System for UGVs. J. Navig. 2015, 68, 253–273. [Google Scholar] [CrossRef]
- Wongtanawijit, R.; Kaorapapong, T. Rubber Tapped Path Detection using K-means Color Segmentation and Distance to Boundary Feature. In Proceedings of the 2018 15th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-Con), Chiang Rai, Thailand, 18–21 July 2018; pp. 130–133. [Google Scholar]
- Wongtanawijit, R.; Khaorapapong, T. Rubber Tapping Position and Harvesting Cup Detection Using Faster-RCNN with MobileNetV2. In Proceedings of the ICSEC 2019—23rd International Computer Science and Engineering Conference, Phuket, Thailand, 30 October–1 November 2019; pp. 335–339. [Google Scholar] [CrossRef]
- Wongtanawijit, R.; Khaorapapong, T. Nighttime rubber tapping line detection in near-range images Near-Range tapping line shadow acquisition technique with tapping line detection algorithm for automatic rubber tapping robot in nighttime. Multimed. Tools Appl. 2021, 80, 29401–29422. [Google Scholar] [CrossRef]
- Nissimov, S.; Goldberger, J.; Alchanatis, V. Obstacle detection in a greenhouse environment using the Kinect sensor. Comput. Electron. Agric. 2015, 113, 104–115. [Google Scholar] [CrossRef]
- Skoczen, M.; Ochman, M.; Spyra, K.; Nikodem, M.; Krata, D.; Panek, M.; Pawlowski, A. Obstacle Detection System for Agricultural Mobile Robot Application Using RGB-D Cameras. Sensors 2021, 21, 5292. [Google Scholar] [CrossRef] [PubMed]
- Al-Kaff, A.; Garcia, F.; Martin, D.; De la Escalera, A.; Maria Armingol, J. Obstacle Detection and Avoidance System Based on Monocular Camera and Size Expansion Algorithm for UAVs. Sensors 2017, 17, 1061. [Google Scholar] [CrossRef]
- Zhang, L.; Li, D. Research on Mobile Robot Target Recognition and Obstacle Avoidance Based on Vision. J. Internet Technol. 2018, 19, 1879–1892. [Google Scholar] [CrossRef]
- Radcliffe, J.; Cox, J.; Bulanon, D.M. Machine vision for orchard navigation. Comput. Ind. 2018, 98, 165–171. [Google Scholar] [CrossRef]
- Liu, L.; Mei, T.; Niu, R.X.; Wang, J.; Liu, Y.B.; Chu, S. RBF-Based Monocular Vision Navigation for Small Vehicles in Narrow Space below Maize Canopy. Appl. Sci. 2016, 6, 182. [Google Scholar] [CrossRef]
- Zhou, B.; He, Y.; Huang, W.C.; Yu, X.; Fang, F.; Li, X.M. Place recognition and navigation of outdoor mobile robots based on random Forest learning with a 3D LiDAR. J. Intell. Robot. Syst. 2022, 104, 72. [Google Scholar] [CrossRef]
- Zhou, S.Y.; Xi, J.Q.; McDaniel, M.W.; Nishihata, T.; Salesses, P.; Iagnemma, K. Self-Supervised Learning to Visually Detect Terrain Surfaces for Autonomous Robots Operating in Forested Terrain. J. Field Robot. 2012, 29, 277–297. [Google Scholar] [CrossRef]
- Li, S.T.; Zhang, J.; Sun, L.; Liu, Y.N. Study on the Secant Segmentation Algorithm of Rubber Tree. In Proceedings of the 2nd International Conference on Machine Vision and Information Technology (CMVIT), Hong Kong, China, 23–25 February 2018. [Google Scholar]
- Severo, E.T.D.; Oliveira, E.F.; Sansigolo, C.A.; Rocha, C.D.; Calonego, F.W. Properties of juvenile and mature woods of Hevea brasiliensis untapped and with tapping panels. Eur. J. Wood Wood Prod. 2013, 71, 815–818. [Google Scholar] [CrossRef]
- Cai, Z.Y.; Li, G.H.; Lin, C.H.; Shi, T.; Zhai, L.G.; Chen, Y.P.; Huang, G.X. Identifying pathogenicity genes in the rubber tree anthracnose fungus Colletotrichum gloeosporioides through random insertional mutagenesis. Microbiol. Res. 2013, 168, 340–350. [Google Scholar] [CrossRef] [PubMed]
- Gebelin, V.; Leclercq, J.; Hu, S.N.; Tang, C.R.; Montoro, P. Regulation of MIR Genes in Response to Abiotic Stress in Hevea brasiliensis. Int. J. Mol. Sci. 2013, 14, 19587–19604. [Google Scholar] [CrossRef] [PubMed]
- Mohammed, C.L.; Rimbawanto, A.; Page, D.E. Management of basidiomycete root- and stem-rot diseases in oil palm, rubber and tropical hardwood plantation crops. For. Pathol. 2014, 44, 428–446. [Google Scholar] [CrossRef]
- Silva, G.A.P.; Gouvea, L.R.L.; Verardi, C.K.; de Oliveira, A.L.B.; Goncalves, P.D. Annual growth increment and stability of rubber yield in the tapping phase in rubber tree clones: Implications for early selection. Ind. Crops Prod. 2014, 52, 801–808. [Google Scholar] [CrossRef]
- Sajitha, K.L.; Dev, S.A.; Florence, E.J. Biocontrol potential of Bacillus subtilis B1 against sapstain fungus in rubber wood. Eur. J. Plant Pathol. 2018, 150, 237–244. [Google Scholar] [CrossRef]
- Wu, C.T.; Ban, S.; Gao, X.S.; Li, W.G. Correlation between DNA methylation status and rubber yield and related characteristics in Hevea brasiliensis tapped at different heights. Ind. Crops Prod. 2018, 111, 563–572. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, Y.; Xing, H. Application of Improved 2-D Entropy Algorithm in Rubber Tree Image Segmentation. In proceeding of the International Conference of Safety Produce Informatization, Chongqing, China, 28–30 November 2019. [Google Scholar]
- Wang, L.; Cao, J.; Zheng, Y.; Huang, C.; Wu, S. The Theoretical Research on Technical Advance and Innovation Integration of Tapping Machinery. IOP Conf. Ser. Mater. Sci. Eng. 2019, 592, 012068. [Google Scholar] [CrossRef]
- Varghese, A.; Panicker, V.V. Computer-Aided Ergonomic Analysis for Rubber Tapping Workers. In Advanced Manufacturing Systems and Innovative Product Design; Deepak, B.B.V.L., Parhi, D.R.K., Biswal, B.B., Eds.; Springer: Singapore, 2021; pp. 293–302. [Google Scholar] [CrossRef]
- Sun, Z.; Yang, H.; Zhang, Z.; Liu, J.; Zhang, X. An Improved YOLOv5-Based Tapping Trajectory Detection Method for Natural Rubber Trees. Agriculture 2022, 12, 1309. [Google Scholar] [CrossRef]
- Sterling, A.; Di Rienzo, J.A. Prediction of South American Leaf Blight and Disease-Induced Photosynthetic Changes in Rubber Tree, Using Machine Learning Techniques on Leaf Hyperspectral Reflectance. Plants 2022, 11, 329. [Google Scholar] [CrossRef]
- Chong, Z.C.; Ali, W.M.A.; Mazlan, A.Z.A. Structural Vibration Study of a New Concept Intelligent Rubber Tapping Machine. In Symposium on Intelligent Manufacturing and Mechatronics; Ali Mokhtar, M.N., Jamaludin, Z., Abdul Aziz, M.S., Maslan, M.N., Razak, J.A., Eds.; Springer: Singapore, 2022; pp. 305–312. [Google Scholar] [CrossRef]
- Angel, T.S.; Amrithesh, K.; Krishna, K.; Ashok, S.; Vignesh, M. Artificial Intelligence-Based Rubber Tapping Robot. In Inventive Communication and Computational Technologies; Ranganathan, G., Fernando, X., Shi, F., Eds.; Springer: Singapore, 2022; Volume 311, pp. 427–438. [Google Scholar] [CrossRef]
- Wang, S.; Zhou, H.; Zhang, C.L.; Ge, L.Z.; Li, W.; Yuan, T.; Zhang, W.Q.; Zhang, J.X. Design, development and evaluation of latex harvesting robot based on flexible Toggle. Robot. Auton. Syst. 2022, 147, 103906. [Google Scholar] [CrossRef]


| Database | Search Terms |
|---|---|
| IEEE Xplore | Title, abstracts: “Abstract”: rubber tree protection OR rubber tapping AND “Document Title”: rubber tree protection OR rubber tapping. |
| MDPI | Title, keywords: rubber tapping OR rubber tree protection. |
| Web of Science | Title, abstracts: (((TS = (rubber tapping (robot OR machine))) OR TS = (rubber tree protection)) OR TI = (rubber tapping (robot OR machine))) OR TI = (rubber tree protection). |
| Engineering Village | Title, abstracts, keywords: (((rubber tapping) WN KY) OR ((tapping machine) OR (rubber tree protection) WN KY)) AND(({ja} OR {ca} OR {cp} OR {ds}) WN DT)). |
| ScienceDirect | Title, abstract or author-specified keywords: “tapping machine” OR “rubber protection”. |
| Springer | Find resources: “rubber tapping” AND (machine OR technique OR robot) OR “rubber tree protection” within (Article AND Chapter and Conference Paper). |
| References | Classification | Accurate Tapping Track | Tapping Depth | Bark Consumption | Profiling Mechanism | Year of Publication |
|---|---|---|---|---|---|---|
| [50] | Traditional cutting | ✖ | ✖ | ✖ | ✖ | 2011 |
| [61] | Optimized rubber tapping knife | ✖ | ✔ | ✔ | ✖ | 2018 |
| [51] | Electrical rubber tapping knife | ✖ | ✔ | ✔ | ✖ | 2018 |
| [56] | Fixed rubber tapping knife | ✔ | ✔ | ✔ | ✖ | 2020 |
| [18] | Self-propelled rubber tapping robot | ✔ | ✔ | ✔ | ✔ | 2021 |
| [59] | Fixed rubber tapping machine | ✖ | ✔ | ✔ | ✔ | 2022 |
| [62] | Self-propelled rubber tapping robot | ✔ | ✔ | ✔ | ✔ | 2022 |
| Parameter Type | Traditional Tapping Knife | Electrical Tapping Knife | ||
|---|---|---|---|---|
| Push-Type | Pull-Type | 4GXJ-1 | 4GXJ-2 | |
| Power | Manpower | Manpower | Brushless motor | Brushless motor |
| Cutting time per tree (s) | 12–18 | 12–18 | 10–16 | 5–10 |
| Bark consumption (mm/year) | 110–150 | 110–150 | 110–130 | 110–130 |
| Battery capacity (mAh) /Endurance (h) | - | - | 2000/1.5–2.0 | 4000/3.5–4.5 |
| Cost of training time for rubber tappers (d) | 25–30 | 25–30 | 3–5 | 3–5 |
| References | Sensors | Feedback | Path Planning Classification | Year of Publication |
|---|---|---|---|---|
| [72] | Camera, GPS, Odometric sensors | Visual | Local tracking path planning | 2010 |
| [76] | Single camera | Visual map | Local obstacle avoidance path planning | 2018 |
| [74] | Camera, Odometric sensors | Visual, Auto-steering | Follow-the-past path tracking planning | 2019 |
| [73] | Lidar, gyroscope | The point cloud map | Local tracking, global point-to-point path planning | 2019 |
| [62] | 3-D Lidar | Point cloud | Local tracking path planning | 2021 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Sun, Z.; Liu, J.; Zhang, Z.; Zhang, X. The Development of Rubber Tapping Machines in Intelligent Agriculture: A Review. Appl. Sci. 2022, 12, 9304. https://doi.org/10.3390/app12189304
Yang H, Sun Z, Liu J, Zhang Z, Zhang X. The Development of Rubber Tapping Machines in Intelligent Agriculture: A Review. Applied Sciences. 2022; 12(18):9304. https://doi.org/10.3390/app12189304
Chicago/Turabian StyleYang, Hui, Zejin Sun, Junxiao Liu, Zhifu Zhang, and Xirui Zhang. 2022. "The Development of Rubber Tapping Machines in Intelligent Agriculture: A Review" Applied Sciences 12, no. 18: 9304. https://doi.org/10.3390/app12189304
APA StyleYang, H., Sun, Z., Liu, J., Zhang, Z., & Zhang, X. (2022). The Development of Rubber Tapping Machines in Intelligent Agriculture: A Review. Applied Sciences, 12(18), 9304. https://doi.org/10.3390/app12189304