
Establishing the True Dynamic Bending Moment of Propeller Shaft Using a Single Bridge of Strain Gauge

 ,
,  , , ,
, , , 
Abstract
:Featured Application
Abstract
1. Introduction
2. Methodology
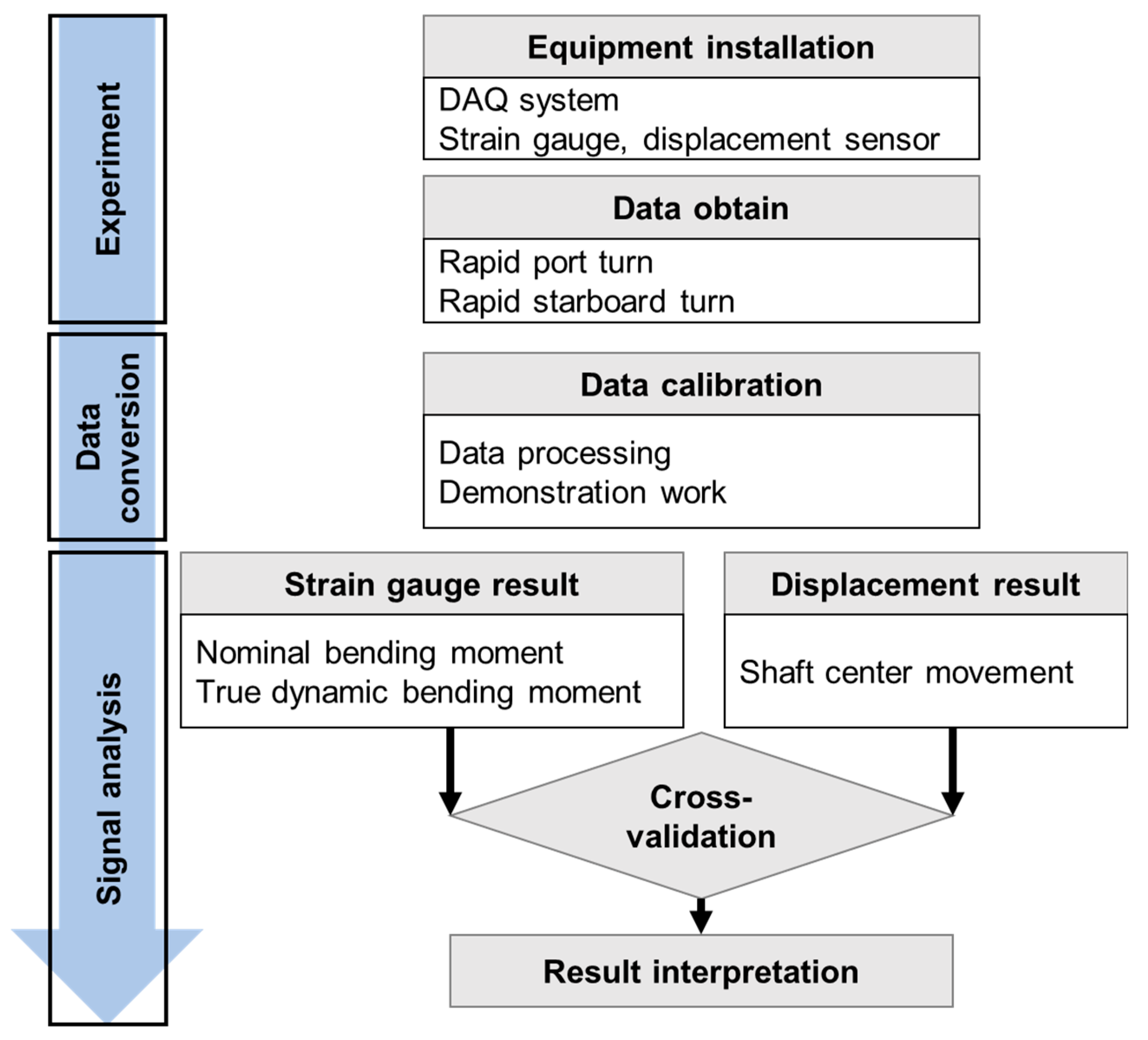
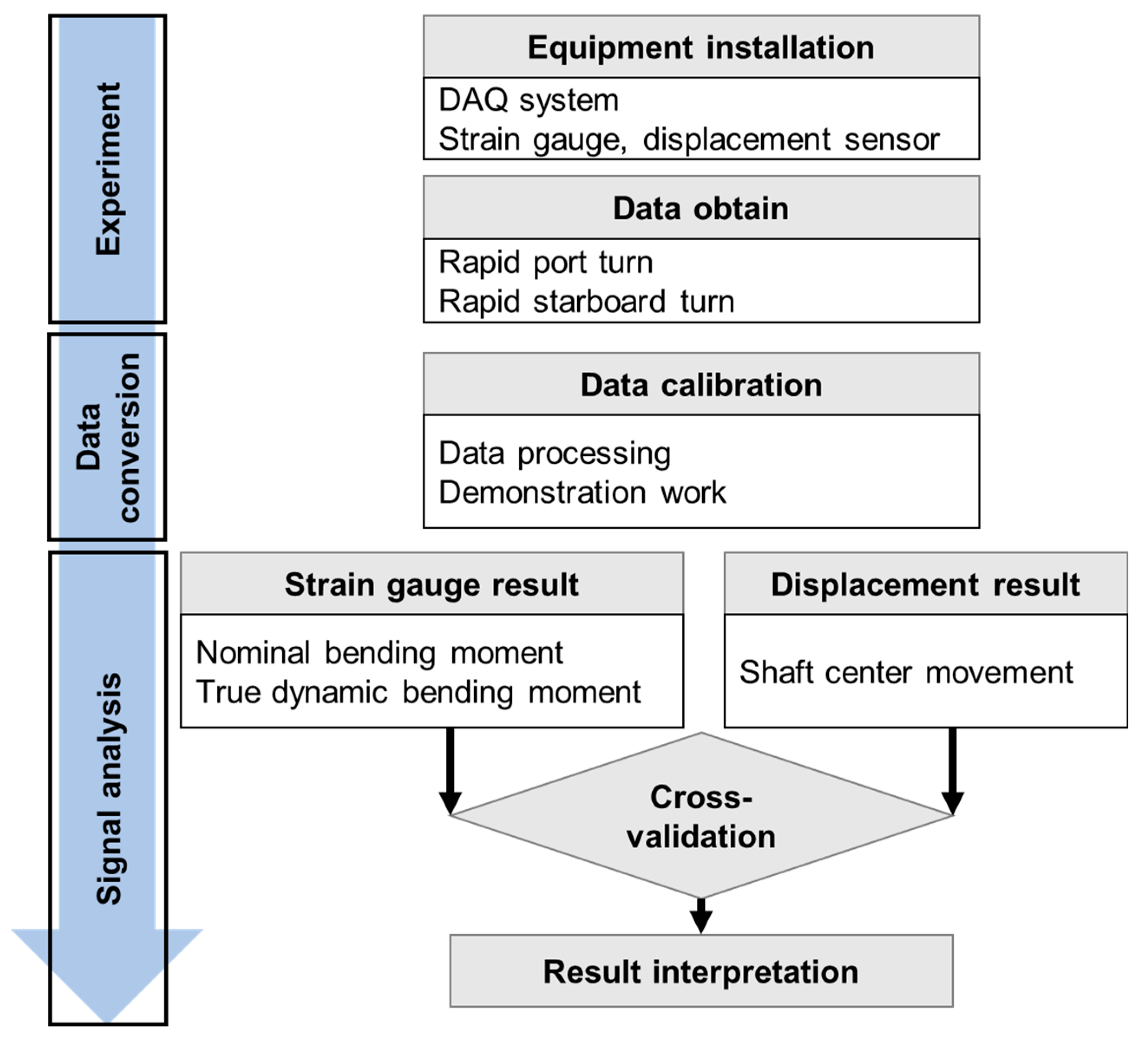
2.1. Research Approach
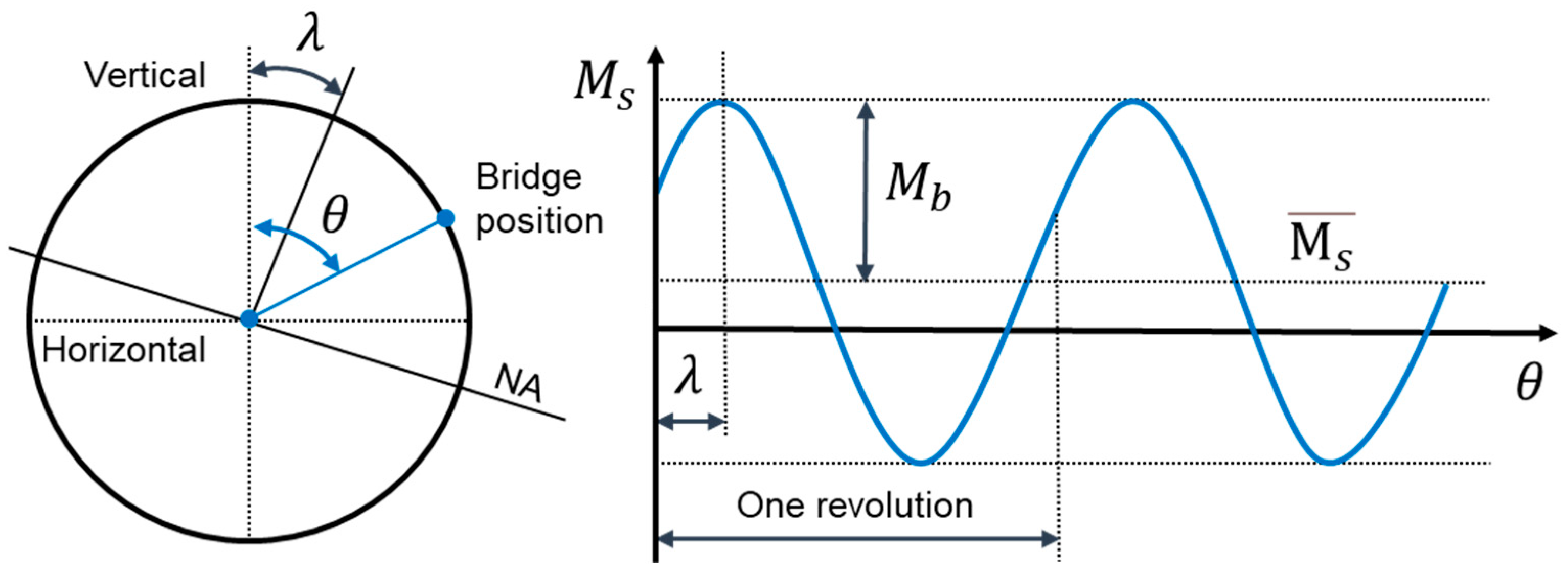
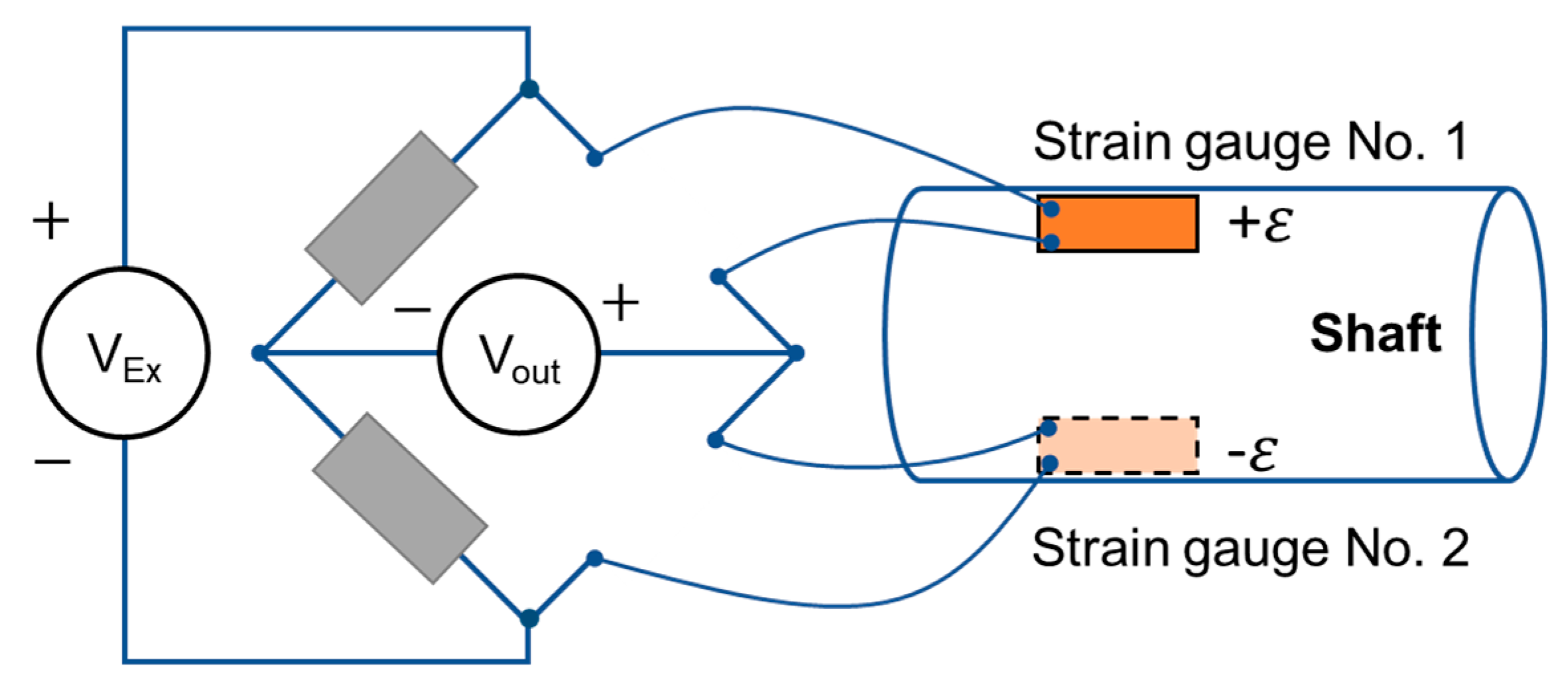
2.2. Bending Moment Measurement Using Strain Gauges
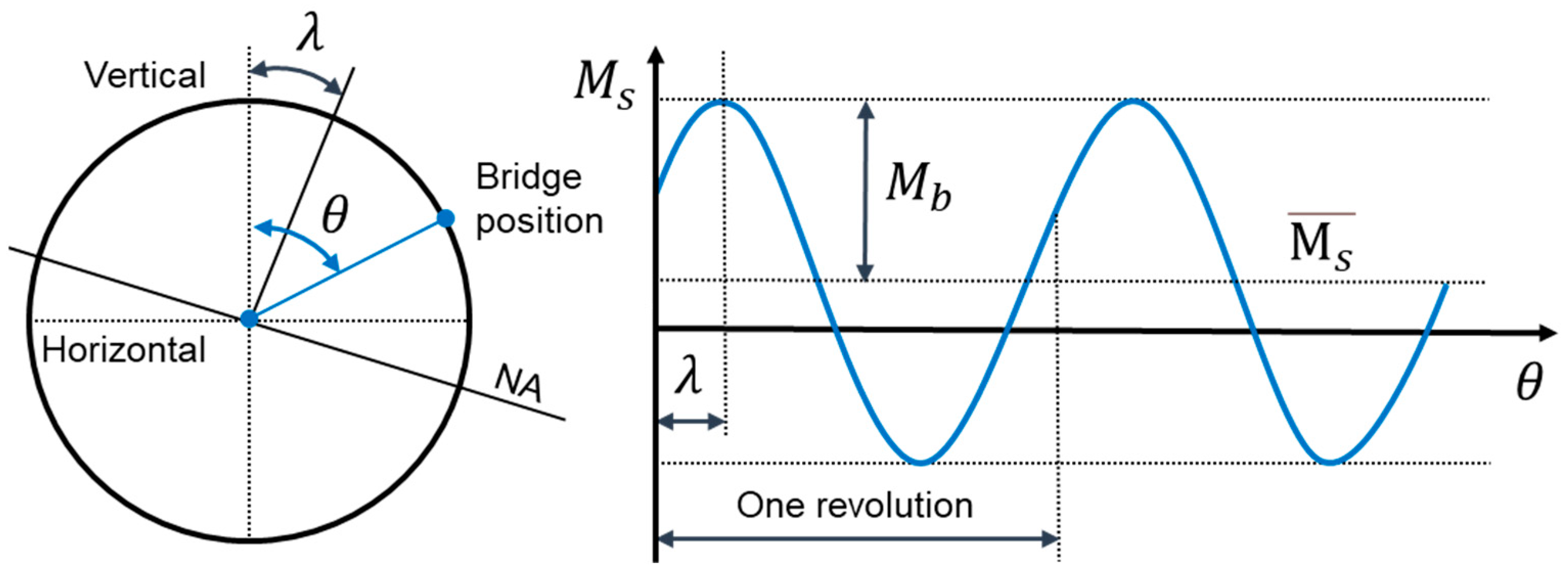
2.3. Bending Moment Calculation Using Frequency Domain
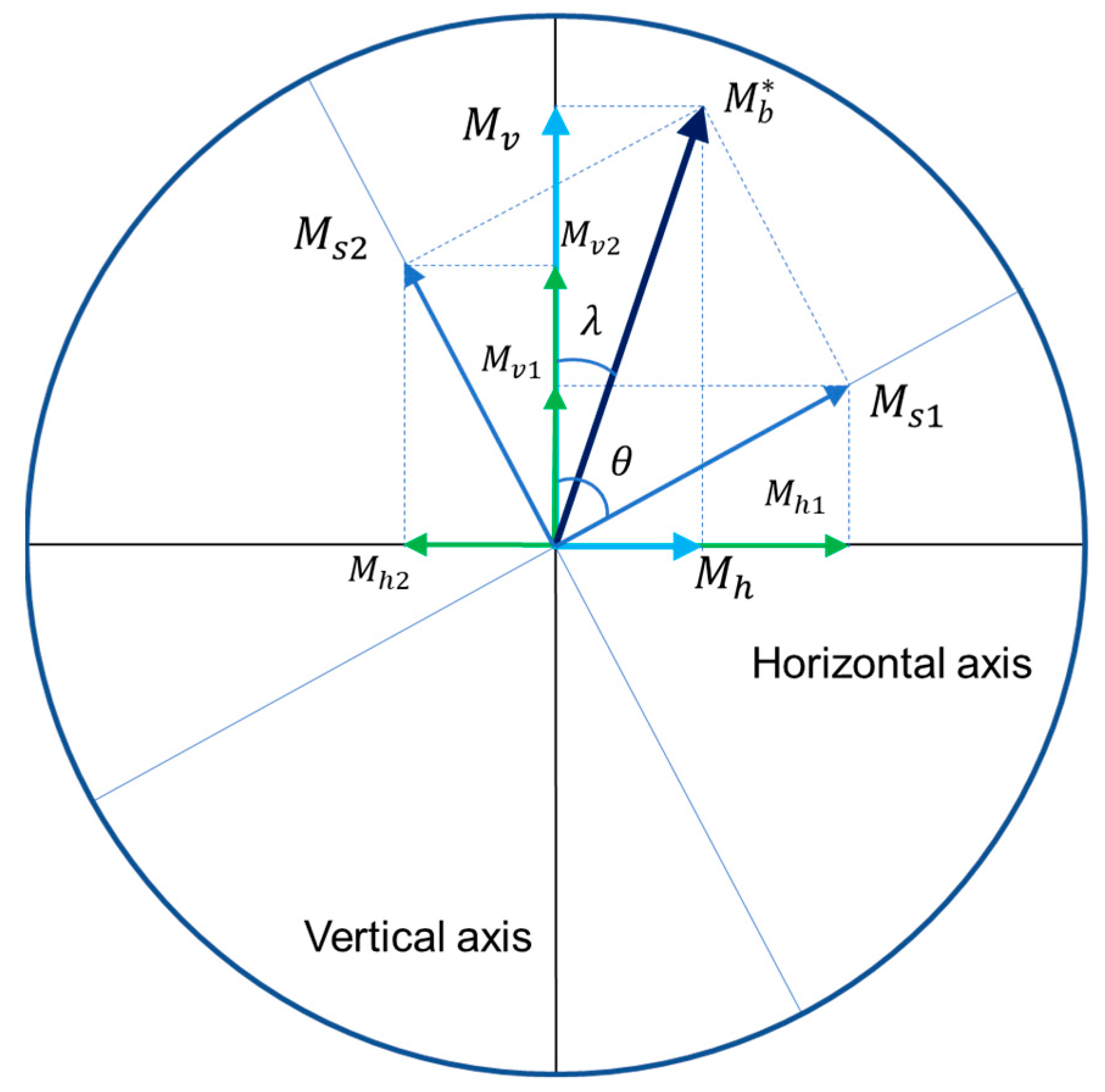
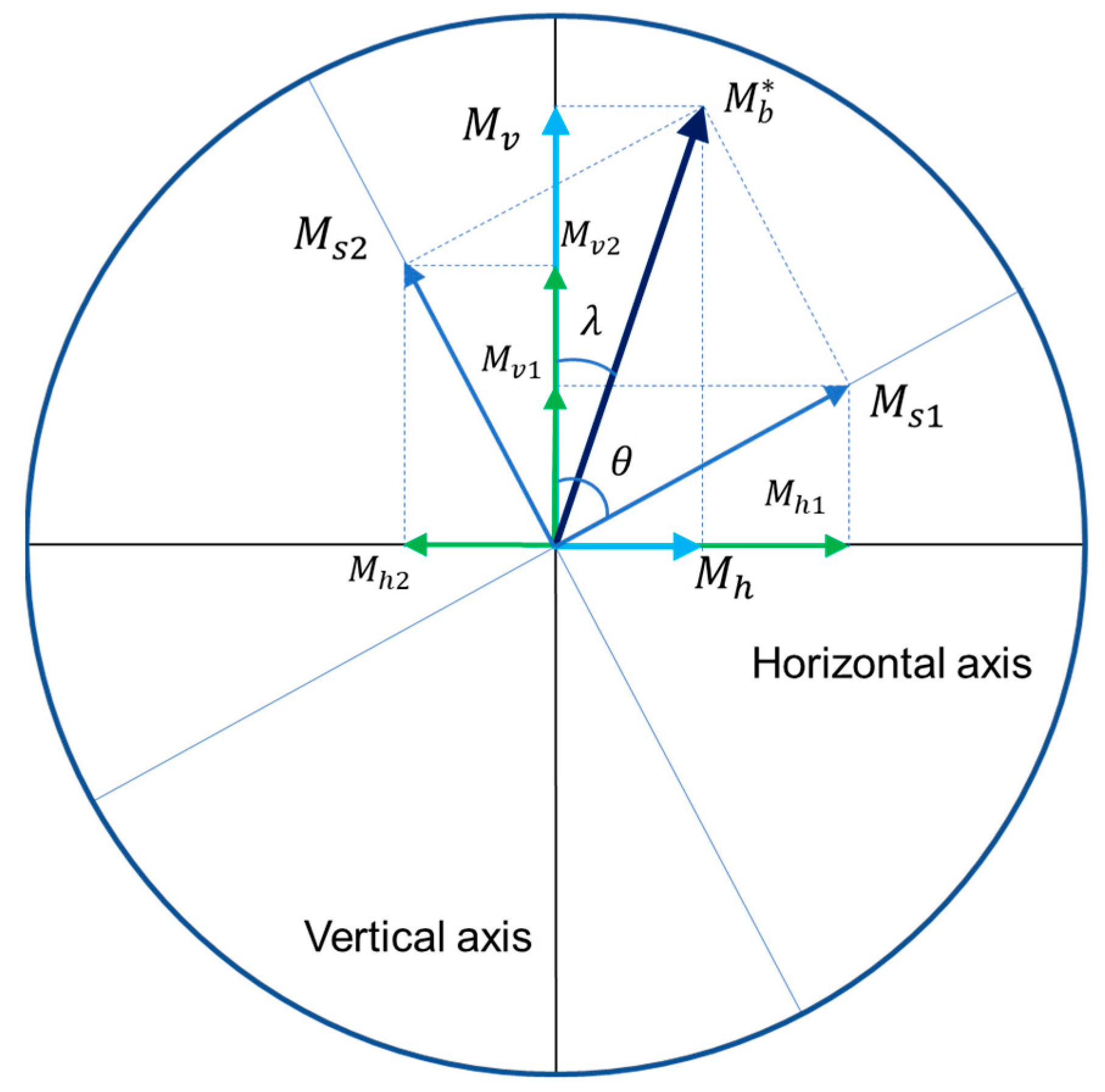
2.4. True Dynamic Bending Moment Establishment
3. Experiment and Results
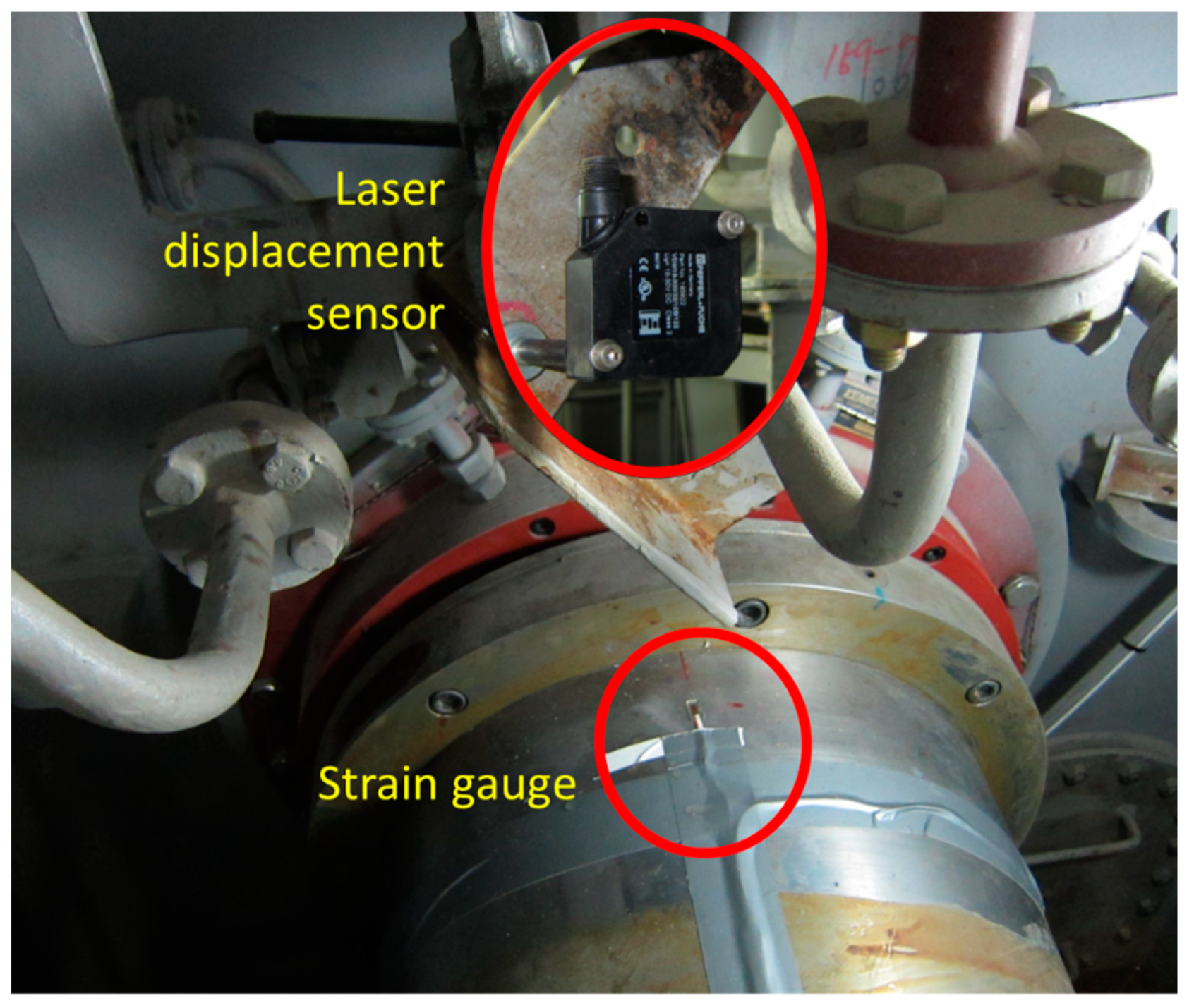
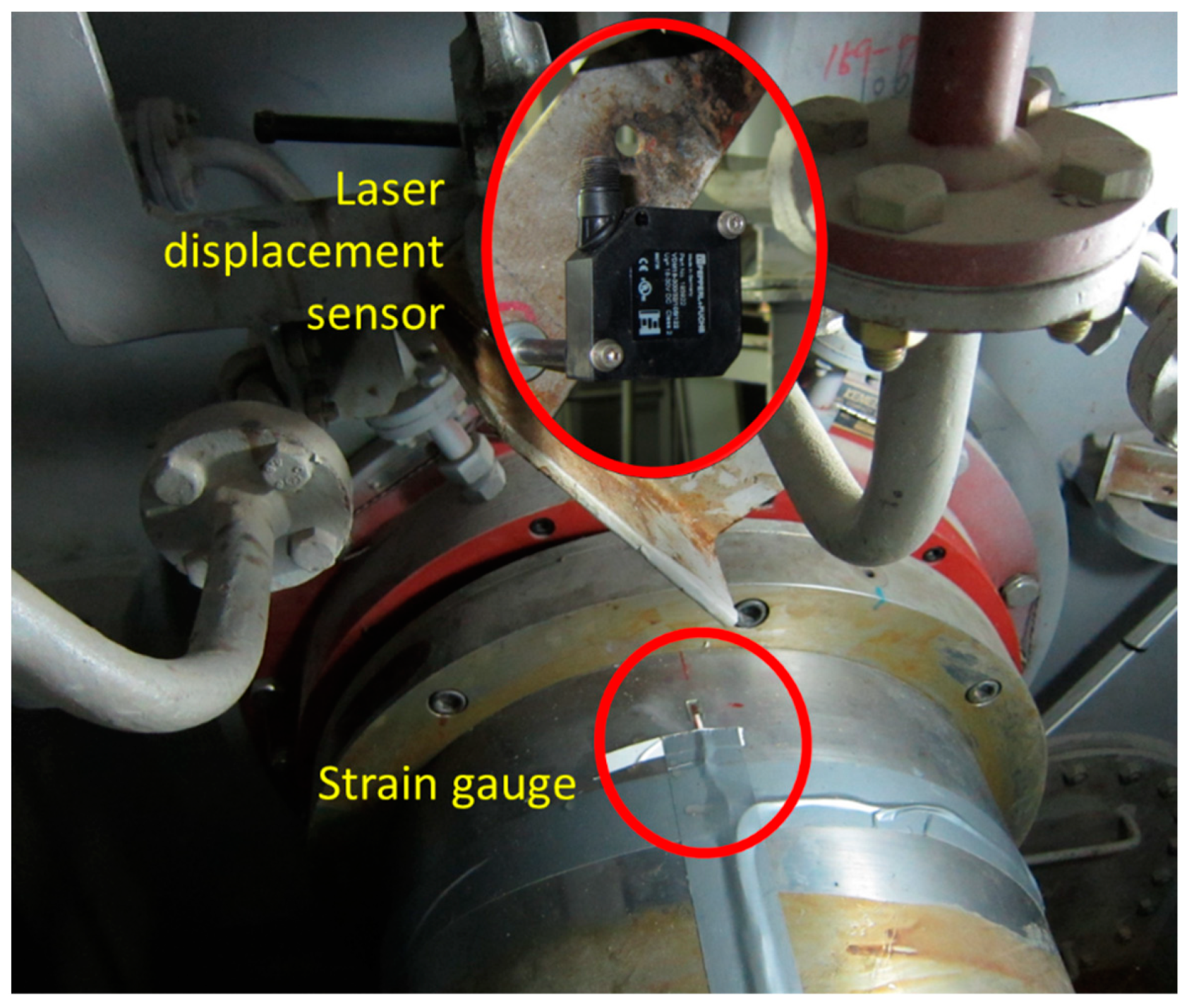
3.1. Experiment Setup
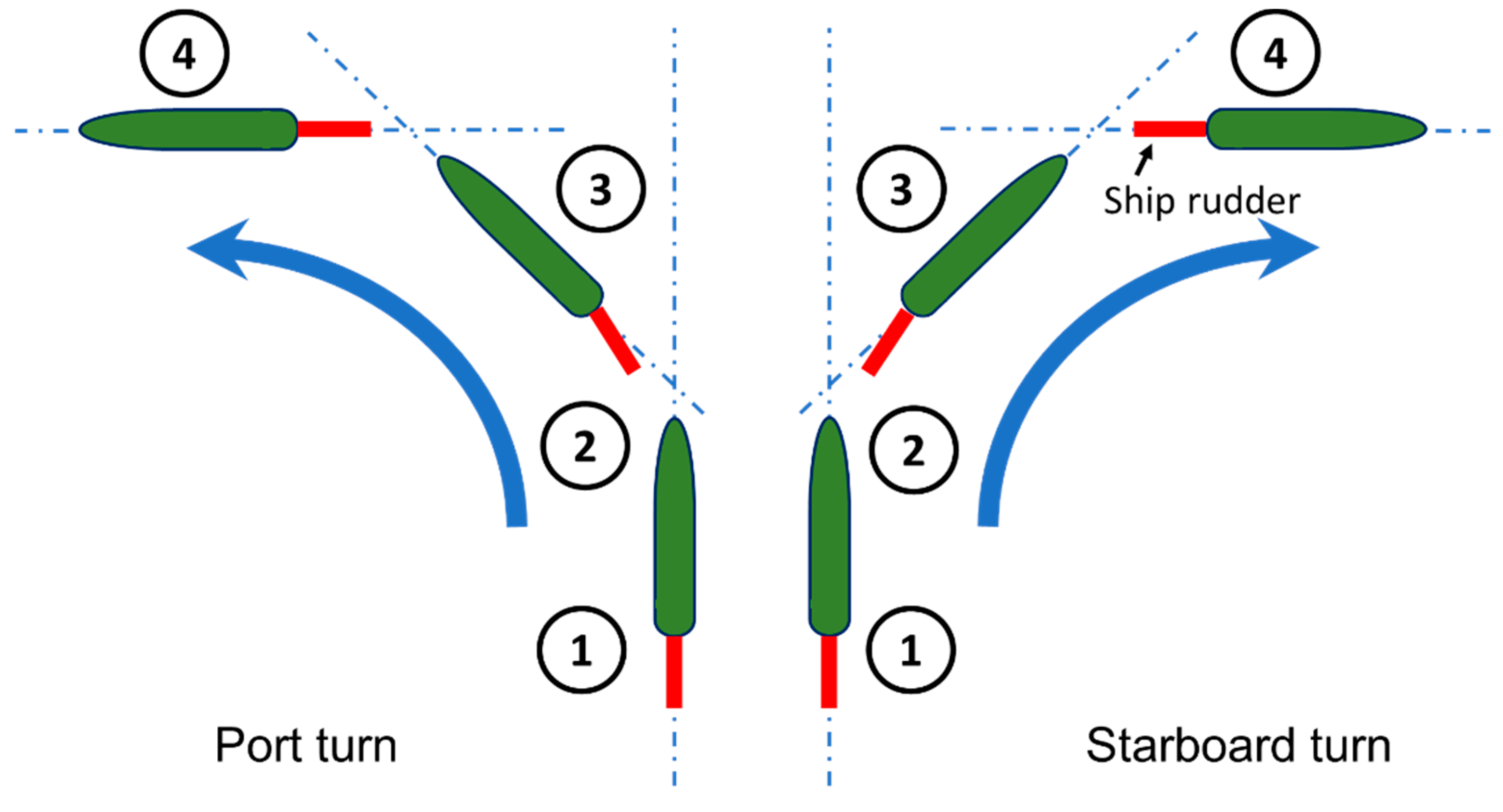
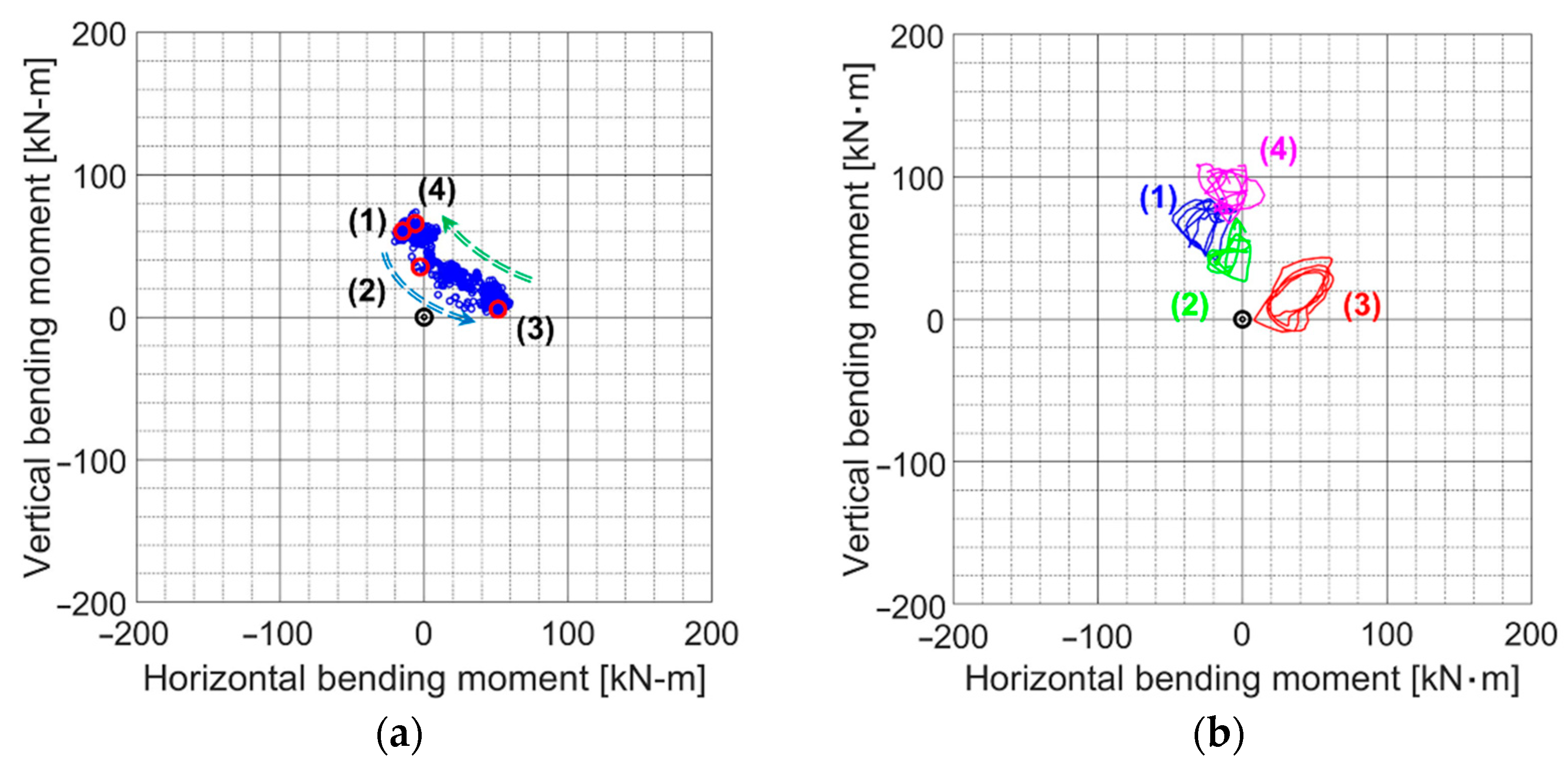
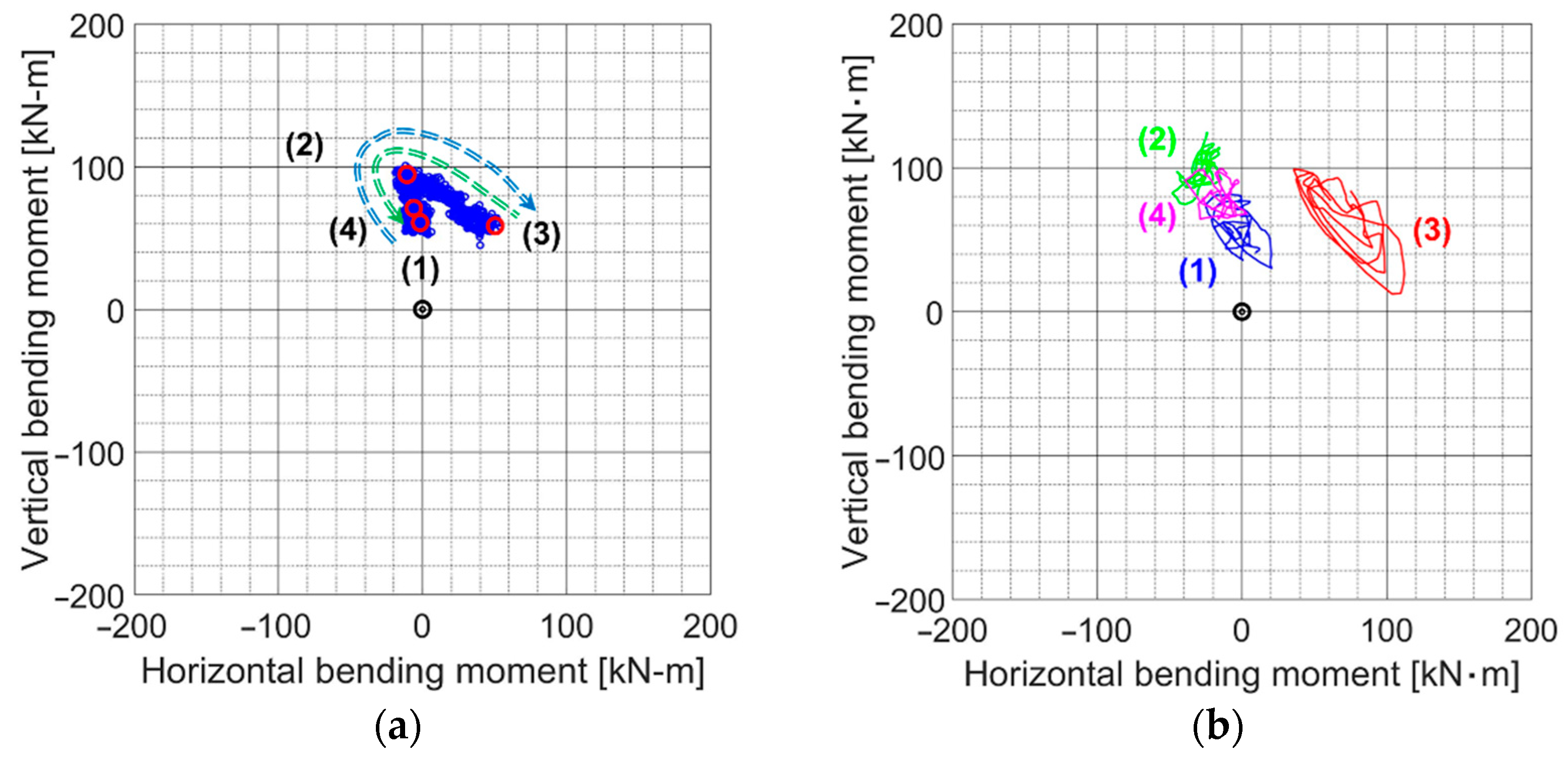
- Stage (1): Rudder angle 0 degrees: NCR straight going (begin);
- Stage (2): Rudder angle changes from 0 to 12 degrees (port or starboard);
- Stage (3): Rudder angle 12 degrees: ship’s heading is gradually changing;
- Stage (4): Rudder angle 0 degrees: NCR straight going (end).
3.2. Results and Discussion
4. Conclusions
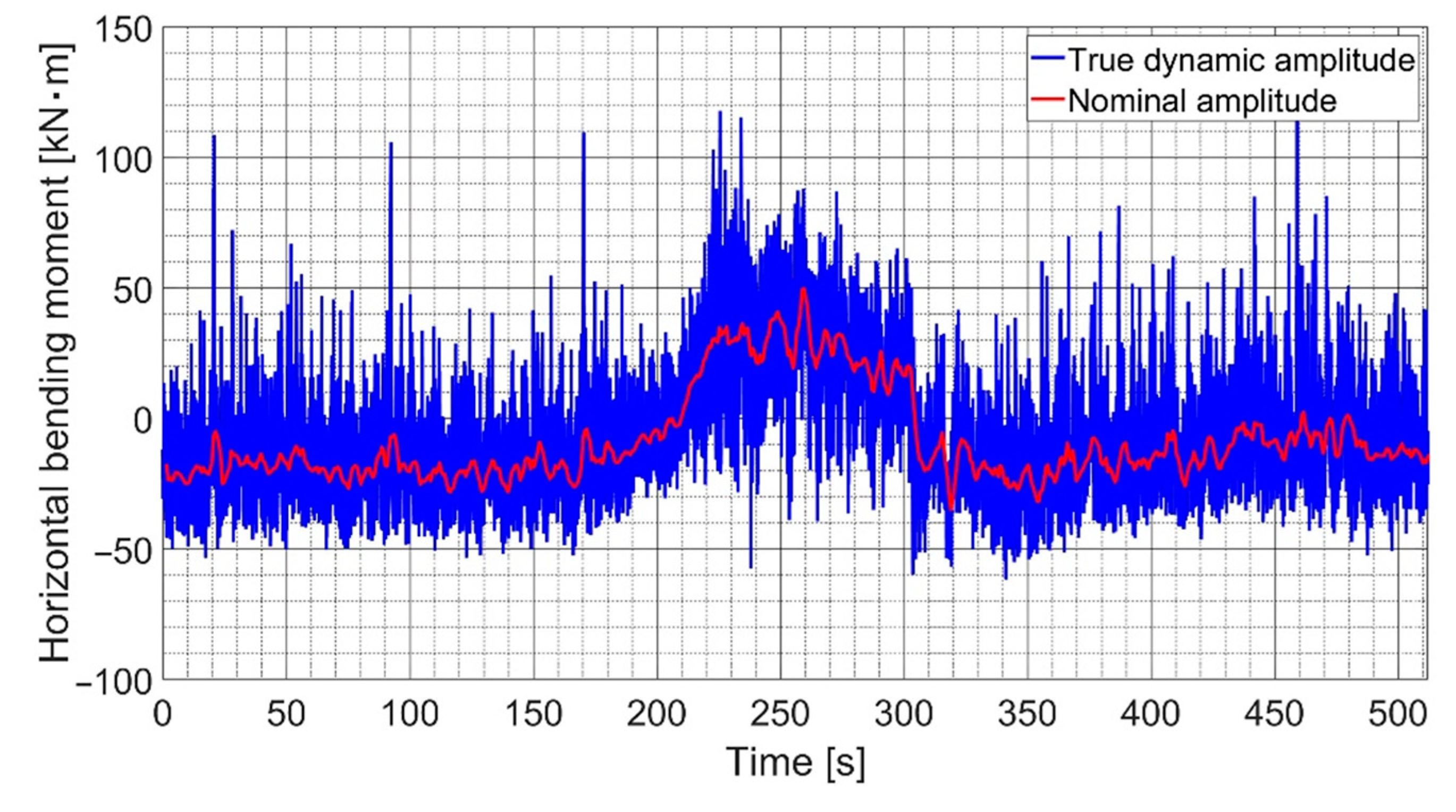
- The strain gauge method is a high-precision technique for measuring the bending moment vibration. The nominal bending moment during one revolution can be determined by the zero-to-peak value in the time domain or the first-order vibration in the frequency domain. To identify the effect of forces induced by the propeller on the vertical and horizontal positions for each angle of rotation, it is recommended to evaluate the true dynamic bending moment by installing two strain gauge bridges positioned 90 degrees to each other.
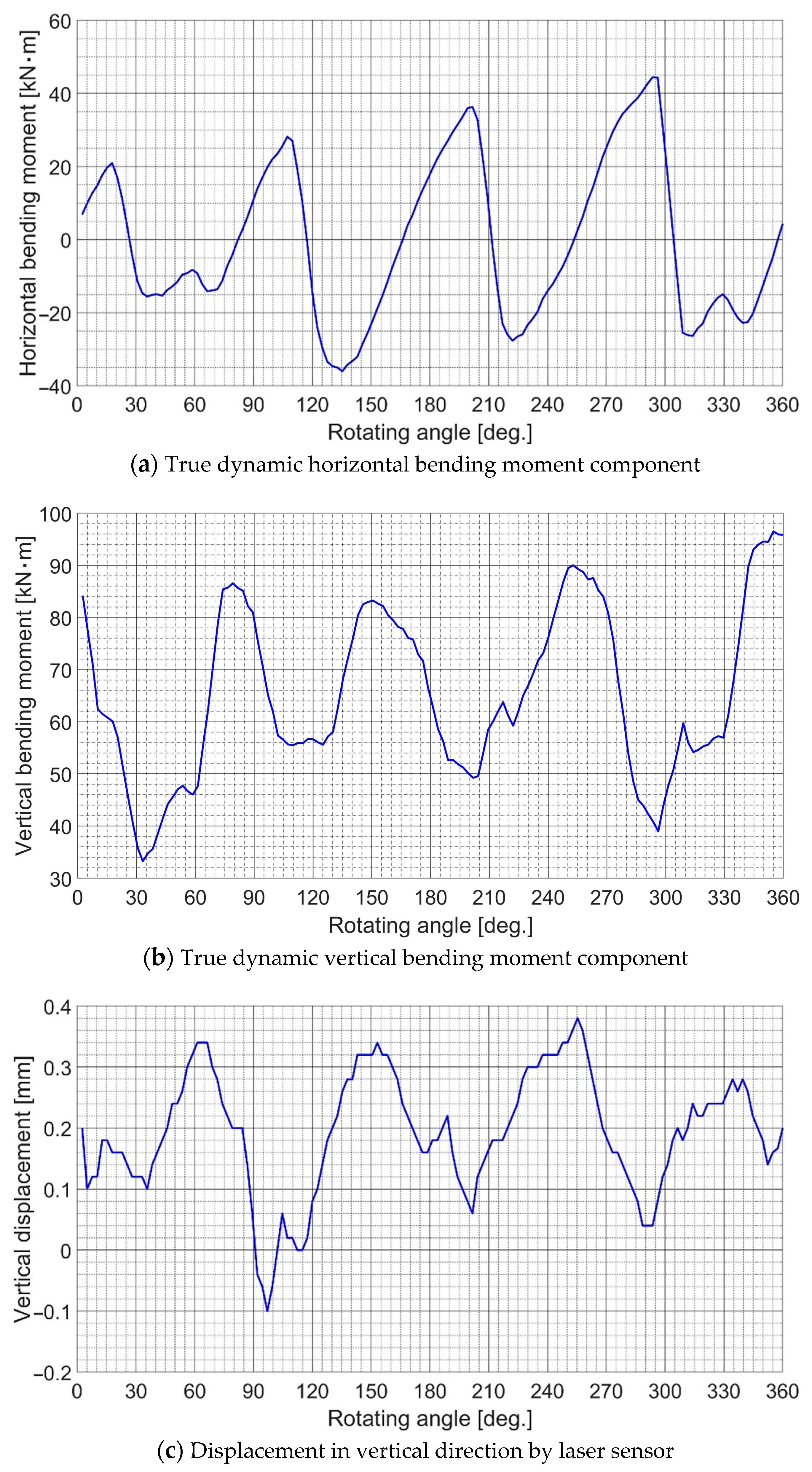
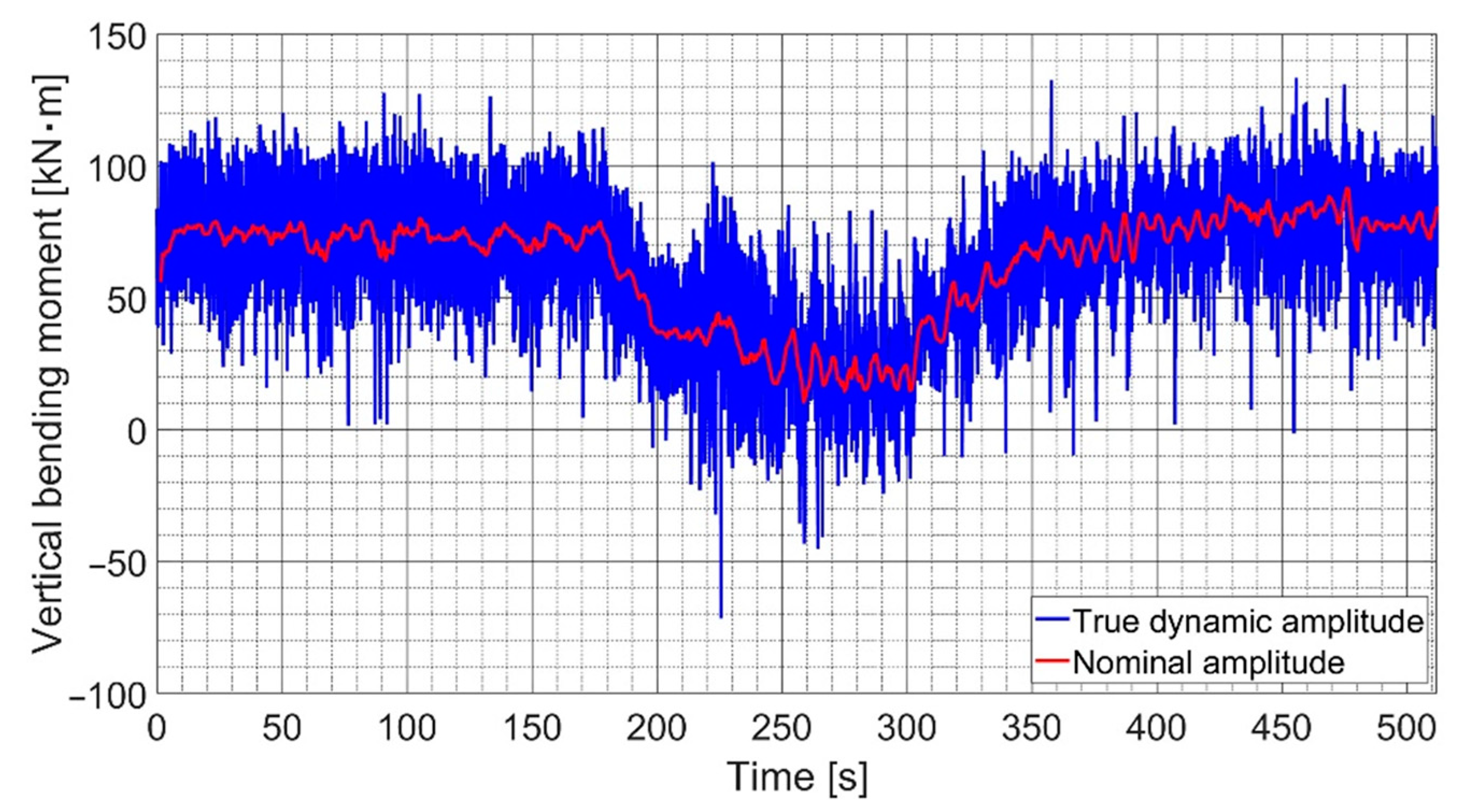
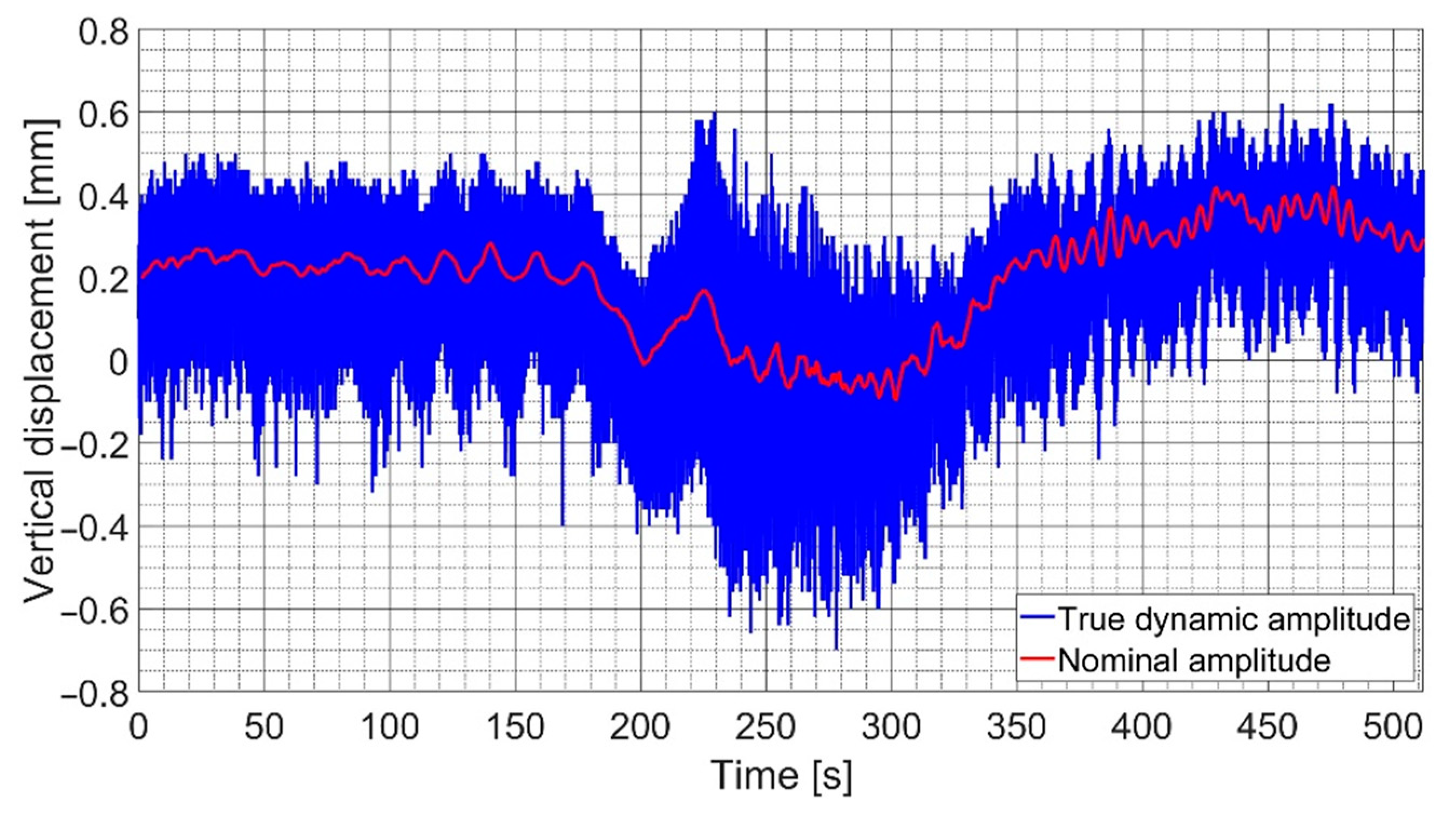
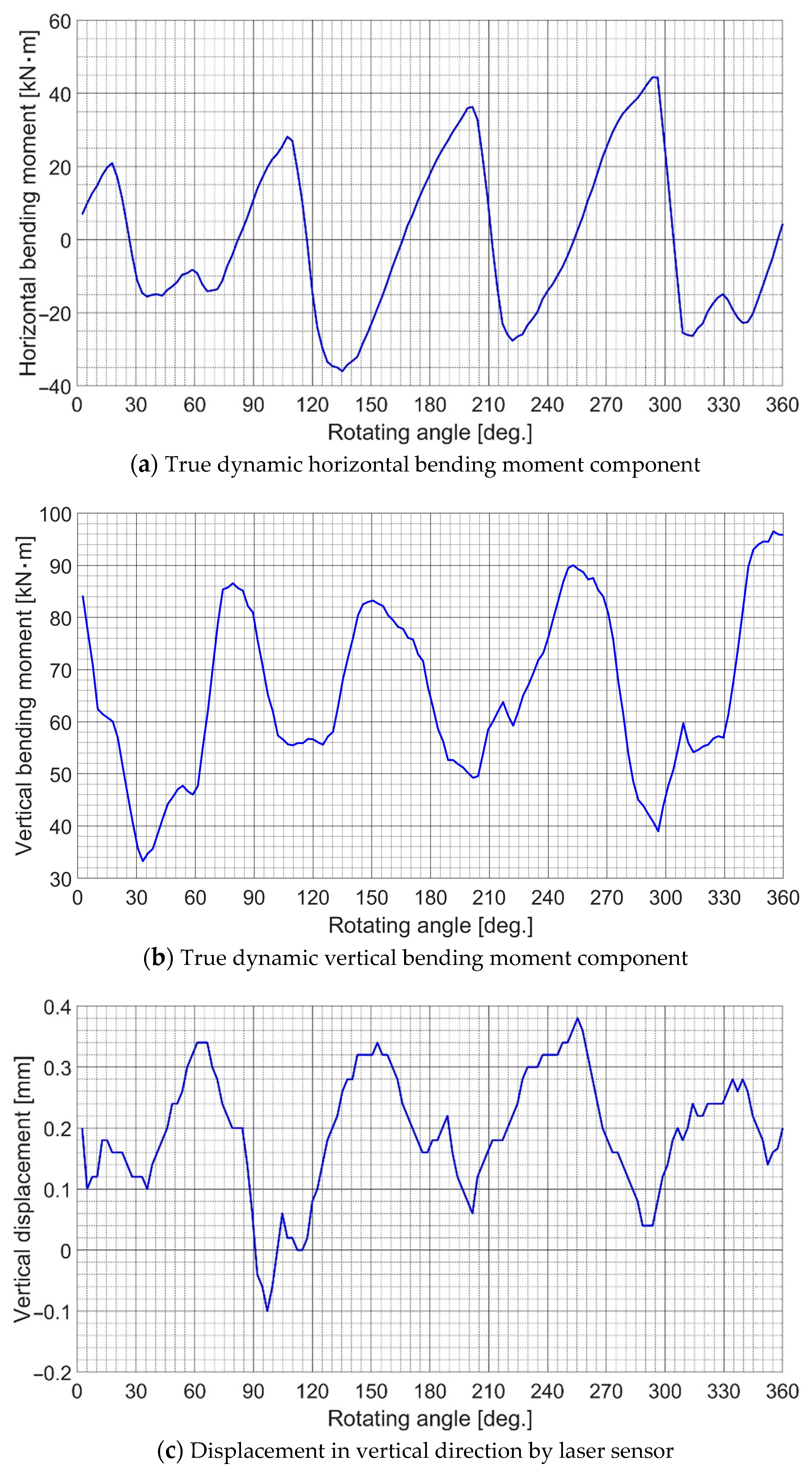
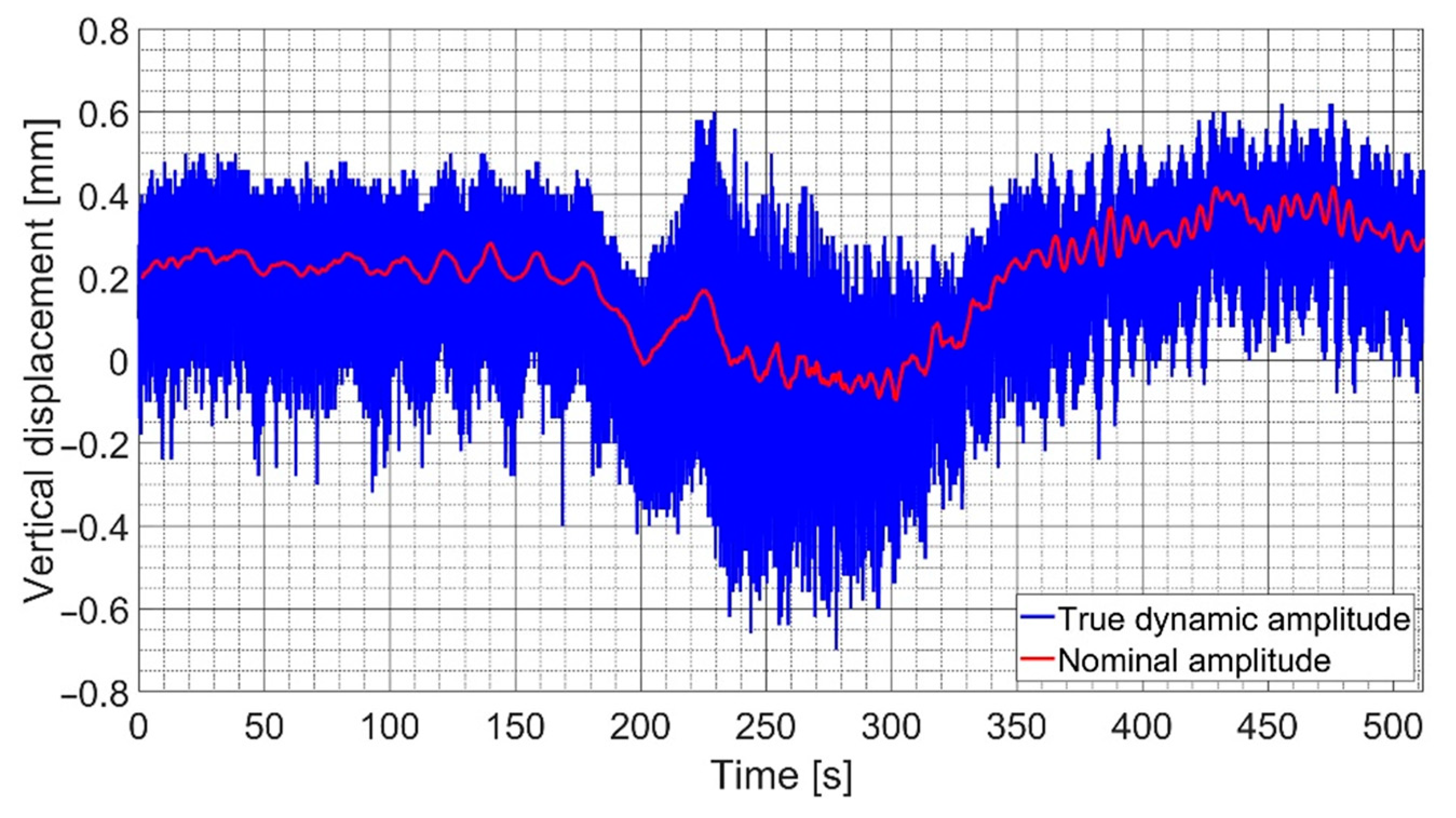
- In case the second bridge, S2, is not available, the true dynamic bending moment can be measured by using the actual bending stress combined with the phase lag stress of the only one bridge of strain gauge at an angle of 90°. The waveform of the established true bending moment was similar to the waveform of the measured displacement. The mean values (average values) of the established true dynamic bending moment were the same as the values of the nominal bending moment obtained by the conventional method. Both waveforms and amplitudes were validated. These confirmed the accuracy of the suggested method.
- The rapid change in the ship’s heading caused a sudden change in the wake-field, which temporarily applied excessive load to the propeller blades and then transmitted to the shaft and bearings. The bending moment of the propeller shaft had moved upward clockwise at the beginning, then returned in the same trajectory at the end of the starboard turn. The propeller operated as a seesaw, which confirmed the increased load on the ASTB. The phenomenon occurred in the opposite direction during the port turn.
- The moment orbit when the rudder angle was 12 degrees is larger than the other stages with respect to the greater propeller force fluctuation. This occurred more clearly in the case of the starboard turn, resulting in a non-uniform oil film on the bearings. This instability can be referred to as an oil whirl. When the oil whirl becomes intense, it becomes an oil whip, which possibly leads to bearing wear and premature failure. The fluctuation behavior was not significant, but early detection of instability is essential for the safe operation of bearings.
- In further work, the displacement sensors should be installed on both vertical and horizontal directions to fully cross-verify the behavior of the bending moment. Additionally, the establishing method presented in this research can be applied in the case of a four-blade propeller. In other cases, it is recommended to install two bridges of strain gauge for each shaft cross-section in order to directly establish the true dynamic bending moment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lehr, W.; Parker, E. Considerations in the design of marine propulsion shaft systems. Soc. Nav. Archit. Mar. Eng. 1961, 67, 555. [Google Scholar]
- Mann, G. Design of propulsion shaft systems using fair curve alignment theory. Nav. Eng. J. 1964, 76, 851–862. [Google Scholar]
- Mann, G. Analysis of shafting problems using fair curve alignment theory. Nav. Eng. J. 1965, 77, 117–133. [Google Scholar] [CrossRef]
- Mann, G. Shipyard alignment of propulsion shafting using fair curve alignment theory. Nav. Eng. J. 1965, 77, 651–659. [Google Scholar] [CrossRef]
- Larsen, O. Some considerations of marine shafting design. Ind. Lubr. Tribol. 1981, 33, 204–237. [Google Scholar] [CrossRef]
- Kuroiwa, R.; Oshima, A.; Nishioka, T.; Tateishi, T.; Ohyama, K.; Ishijima, T. Reliability Improvement of Stern Tube Bearing Considering Propeller Shaft Forces during Ship Turning; Technical Review; Mitshbishi Heavy Industries, Ltd.: Tokyo, Japan, 2007; Volume 44, pp. 1–3. [Google Scholar]
- Vartdal, B.J.; Gjestland, T.; Arvidsen, T.I. Lateral propeller forces and their effects on shaft bearings. In Proceedings of the First International Symposium on Marine Propulsors, Trondheim, Norway, 22–24 June 2009; pp. 475–481. [Google Scholar]
- Dubbioso, G.; Muscari, R.; Ortolani, F.; Di Mascio, A. Analysis of propeller bearing loads by CFD. Part I: Straight ahead and steady turning maneuvers. Ocean Eng. 2017, 130, 241–259. [Google Scholar] [CrossRef]
- Muscari, R.; Dubbioso, G.; Ortolani, F.; Di Mascio, A. Analysis of propeller bearing loads by CFD. Part II: Transient maneuvers. Ocean Eng. 2017, 146, 217–233. [Google Scholar] [CrossRef]
- Lee, J.-U. Application of strain gauge method for investigating influence of ship shaft movement by hydrodynamic propeller forces on shaft alignment. Measurement 2018, 121, 261–275. [Google Scholar] [CrossRef]
- Choi, S.-P.; Lee, J.-U.; Park, J.-B. Application of Deep Reinforcement Learning to Predict Shaft Deformation Considering Hull Deformation of Medium-Sized Oil/Chemical Tanker. J. Mar. Sci. Eng. 2021, 9, 767. [Google Scholar] [CrossRef]
- Song, G.; Park, H.; Lee, T. The Effect of Rudder Existence on Propeller Eccentric Force. J. Mar. Sci. Eng. 2019, 7, 455. [Google Scholar] [CrossRef]
- Class, N.K. Guidelines on Shafting Alignment; Class NK: Tokyo, Japan, 2006. [Google Scholar]
- MAN Energy Solutions. Final Alignment of Engine on Board; MAN Energy Solutions: Augsburg, Germany, 2014; p. 5. [Google Scholar]
- MAN Energy Solutions. Bearing Load Measurement by Jacking Up; MAN Energy Solutions: Augsburg, Germany, 2012; p. 23. [Google Scholar]
- MAN B&W G-Engines. Available online: https://www.mandieselturbo.com/docs/default-source/shopwaredocuments/man-b-w-g-engines-green-ultra-long-stroke-engines15fbf9a55cda459c8d405548eea8e7e1.pdf?sfvrsn=3 (accessed on 20 July 2022).
- Ultra Long Stroke Engine. Available online: https://www.wartsila.com/encyclopedia/term/ultra-long-stroke-engine (accessed on 20 July 2022).
- Wake-Field. Available online: https://www.wartsila.com/encyclopedia/term/wake-field (accessed on 20 July 2022).
- Mikkelsen, H.; Shao, Y.; Walther, J.H. Numerical study of nominal wake fields of a container ship in oblique regular waves. Appl. Ocean Res. 2022, 119, 102968. [Google Scholar] [CrossRef]
- Sprenger, F.; Maron, A.; Delefortrie, G.; Cura-Hochbaum, A.; Papanikolaou, A. Experimental studies on seakeeping and manoeuvrability in adverse weather conditions. J. Ship Res. 2016, 61, 131–152. [Google Scholar] [CrossRef] [Green Version]
- Valanto, P.; Hong, Y. Experimental investigation on ship wave added resistance in regular head, oblique, beam, and following waves. In Proceedings of the Twenty-fifth International Ocean and Polar Engineering Conference, Kona, HI, USA, 21–26 June 2015. [Google Scholar]
- Wu, T.C.; Deng, R.; Luo, W.Z.; Sun, P.N.; Dai, S.S.; Li, Y.L. 3D-3C wake field measurement, reconstruction and spatial distribution of a Panamax Bulk using towed underwater 2D-3C SPIV. Appl. Ocean Res. 2020, 105, 102437. [Google Scholar] [CrossRef]
- Sun, S.; Chang, X.; Wang, W.; Guo, C.; Zhang, H. Numerical simulation of wake field and propulsion performance in a four-screw ship. Ocean Eng. 2019, 186, 106092. [Google Scholar] [CrossRef]
- Sadat-Hosseini, H.; Toxopeus, S.; Kim, D.H.; Castiglione, T.; Sanada, Y.; Stocker, M.; Simonsen, C.; Otzen, J.F.; Toda, Y.; Stern, F. Experiments and computations for KCS added resistance for variable heading. In Proceedings of the SNAME Maritime Convention and 5th World Maritime Technology Conference, Providence, RI, USA, 3–7 November 2015. [Google Scholar]
- Lee, J.-W.; Vuong, Q.D.; Jeong, B.; Lee, J.-U. Changes in Propeller Shaft Behavior by Fluctuating Propeller Forces during Ship Turning. Appl. Sci. 2022, 12, 5041. [Google Scholar] [CrossRef]
- Grant, R.B. Shaft Alignment Methods with Strain Gages and Load Cells. Mar. Technol. 1980, 17, 8–15. [Google Scholar] [CrossRef]
- Forrest, A.W.; Labasky, R.F. Shaft alignment using strain gages. Mar. Technol. 1981, 18, 276–284. [Google Scholar] [CrossRef]
- Cdr Amit Batra, L.; Shankar, K.; Swarnamani, S. Propulsion shaft alignment measurements on warships afloat and alignment solution using multi-objective optimisation. J. Mar. Eng. Technol. 2007, 6, 39–49. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, J.; Li, Y.; Li, J. Identification of bearing load by three section strain gauge method: Theoretical and experimental research. Measurement 2013, 46, 3968–3975. [Google Scholar] [CrossRef]
- Avgouleas, K.; Sarris, E.; Gougoulidis, G. Practical Aspects of Propulsion Shaft Alignment. In Proceedings of the SNAME 7th International Symposium on Ship Operations, Management and Economics, Virtual, 6–7 April 2021. [Google Scholar]
- Batrak, Y.; Batrak, R.; Berin, D.; Mikhno, A. Propulsion shafting whirling vibration: Case studies and perspective. In Proceedings of the SNAME 14th Propeller and Shafting Symposium, Norfolk, VA, USA, 15–16 September 2015. [Google Scholar]
- Zhang, W.; Yang, J.; Li, C.; Dai, R.; Yang, A. Theoretical and experimental research on turbo-generator shaft alignment using strain gauge method. J. Vib. Control 2017, 23, 1183–1192. [Google Scholar] [CrossRef]
- Ho, W.H.; Tsai, J.T.; Chou, J.H.; Yue, J.B. Intelligent hybrid Taguchi-genetic algorithm for multi-criteria optimization of shaft alignment in marine vessels. IEEE Access 2016, 4, 2304–2313. [Google Scholar] [CrossRef]
- Iriarte, X.; Aginaga, J.; Gainza, G.; Ros, J.; Bacaicoa, J. Optimal strain-gauge placement for mechanical load estimation in circular cross-section shafts. Measurement 2021, 174, 108938. [Google Scholar] [CrossRef]
- ISO 20283-4:2012; Mechanical Vibration—Measurement of Vibration on Ships—Part 4: Measurement and Evaluation of Vibration of the Ship Propulsion Machinery. International Organization for Standardization: Geneva, Switzerland, 2012.
- Measuring Strain with Strain Gages—NI. Available online: https://www.ni.com/en-us/innovations/white-papers/07/measuring-strain-with-strain-gages.html (accessed on 20 July 2022).
- Hoffmann, K. An Introduction to Measurements Using Strain Gages; Hottinger Baldwin: Darmstadt, Germany, 1989. [Google Scholar]
- Wheatstone Bridge. Working, Examples, Applications. Available online: https://www.electronicshub.org/wheatstone-bridge/ (accessed on 20 July 2022).
- Lee, T.G.; Song, G.S.; Kim, J.N.; Lee, J.S.; Park, H.G. Effect of propeller eccentric forces on the bearing loads of the complicated shafting system for large container ships. In Proceedings of the Fifth International Symposium on Marine Propulsors, Espoo, Finland, 12–15 June 2017. [Google Scholar]
- Soares, C. (Ed.) Chapter 3—Gas Turbine Configurations and Heat Cycles. In Gas Turbines, 2nd ed.; Butterworth-Heinemann: Oxford, UK, 2015; pp. 93–171. [Google Scholar]
- Boyce, M.P. (Ed.) 5—Rotor Dynamics. In Gas Turbine Engineering Handbook, 4th ed.; Butterworth-Heinemann: Oxford, UK, 2012; pp. 215–250. [Google Scholar]
- Mobley, R.K. (Ed.) 60—Bearings. In Plant Engineer’s Handbook; Butterworth-Heinemann: Oxford, UK, 2001; pp. 1081–1100. [Google Scholar]
- Mishra, P.C.; Rahnejat, H. 20—Tribology of big-end bearings. In Tribology and Dynamics of Engine and Powertrain; Woodhead Publishing: Cambridge, UK, 2010; pp. 635–659. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ship | Propeller | ||
|---|---|---|---|
| Type | Oil/chemical tanker | Manufacturer | HMD |
| Deadweight | 50,000 DWT | Type | Fixed pitch propeller |
| Dimension | 174.0 m × 32.2 m × 19.1 m | Number of blades | 4 |
| Diameter | 6600 mm | ||
| Main engine | Material | Ni-Al-Bronze | |
| Manufacturer | MAN B&W | Mass | 18,200 kg |
| Type | 6G50ME-B | Cap and nut mass | 1538 kg |
| MCR | 7700 kW × 93.4 rpm | ||
| NCR | 5344 kW × 82.7 rpm | Propeller shaft | |
| Material | Forged steel | ||
| Flywheel | Diameter | 500 mm | |
| Mass | 11,207 kg | Tensile strength | 600 N/mm2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vuong, Q.D.; Lee, J.-w.; Lee, W.-J.; Choi, H.; Seo, K.; Kim, Y.; Jeong, J.H.; Song, M.-h.; Lee, J.-u. Establishing the True Dynamic Bending Moment of Propeller Shaft Using a Single Bridge of Strain Gauge. Appl. Sci. 2022, 12, 9235. https://doi.org/10.3390/app12189235
Vuong QD, Lee J-w, Lee W-J, Choi H, Seo K, Kim Y, Jeong JH, Song M-h, Lee J-u. Establishing the True Dynamic Bending Moment of Propeller Shaft Using a Single Bridge of Strain Gauge. Applied Sciences. 2022; 12(18):9235. https://doi.org/10.3390/app12189235
Chicago/Turabian StyleVuong, Quang Dao, Ji-woong Lee, Won-Ju Lee, Hyejin Choi, Kanghyun Seo, Youngmin Kim, Jin Hui Jeong, Myeong-ho Song, and Jae-ung Lee. 2022. "Establishing the True Dynamic Bending Moment of Propeller Shaft Using a Single Bridge of Strain Gauge" Applied Sciences 12, no. 18: 9235. https://doi.org/10.3390/app12189235
APA StyleVuong, Q. D., Lee, J.-w., Lee, W.-J., Choi, H., Seo, K., Kim, Y., Jeong, J. H., Song, M.-h., & Lee, J.-u. (2022). Establishing the True Dynamic Bending Moment of Propeller Shaft Using a Single Bridge of Strain Gauge. Applied Sciences, 12(18), 9235. https://doi.org/10.3390/app12189235