
AnyPlace: Automatic Gaze Alignment of the Teleported Avatar for MR Collaborative Environments



Abstract
:1. Introduction
2. Related Works
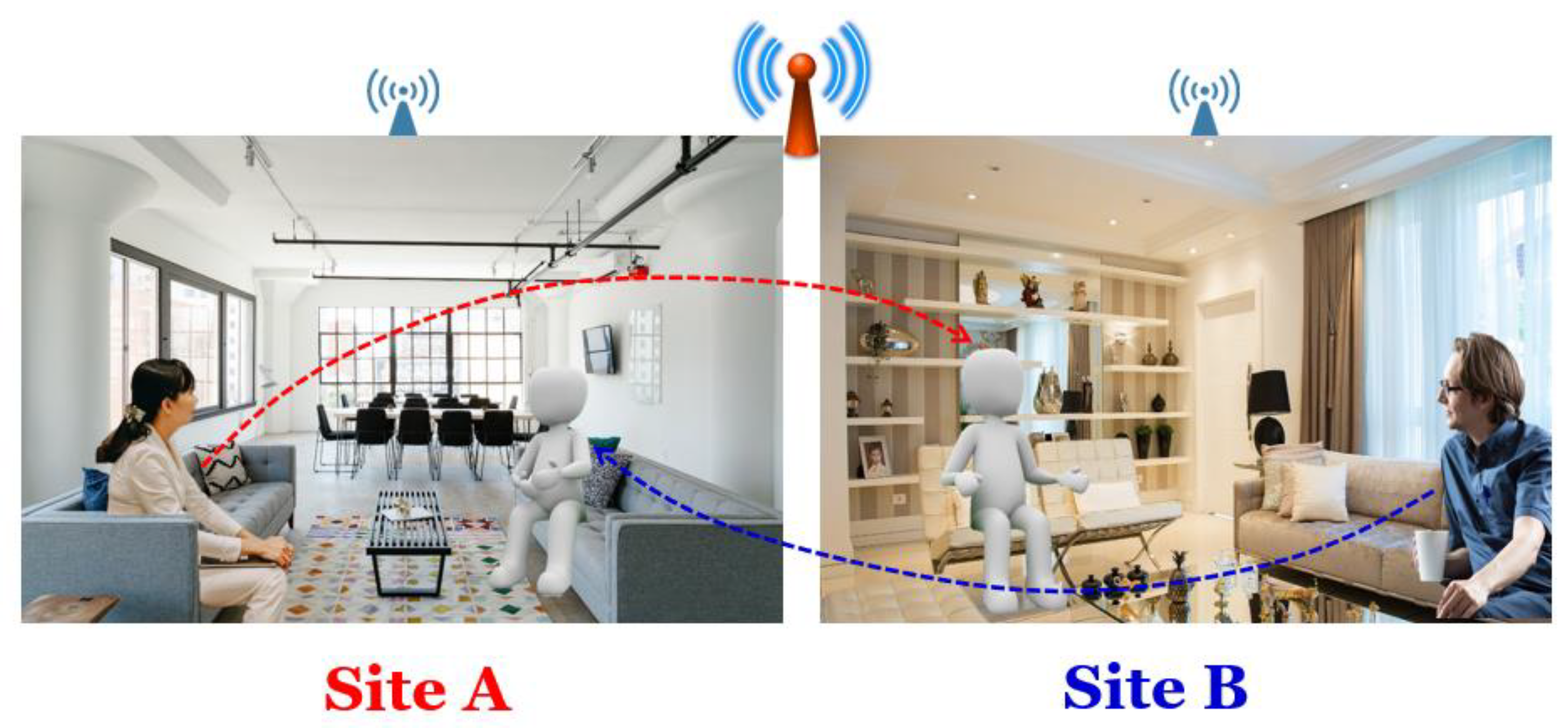
2.1. Realistic Tele-Conference Systems
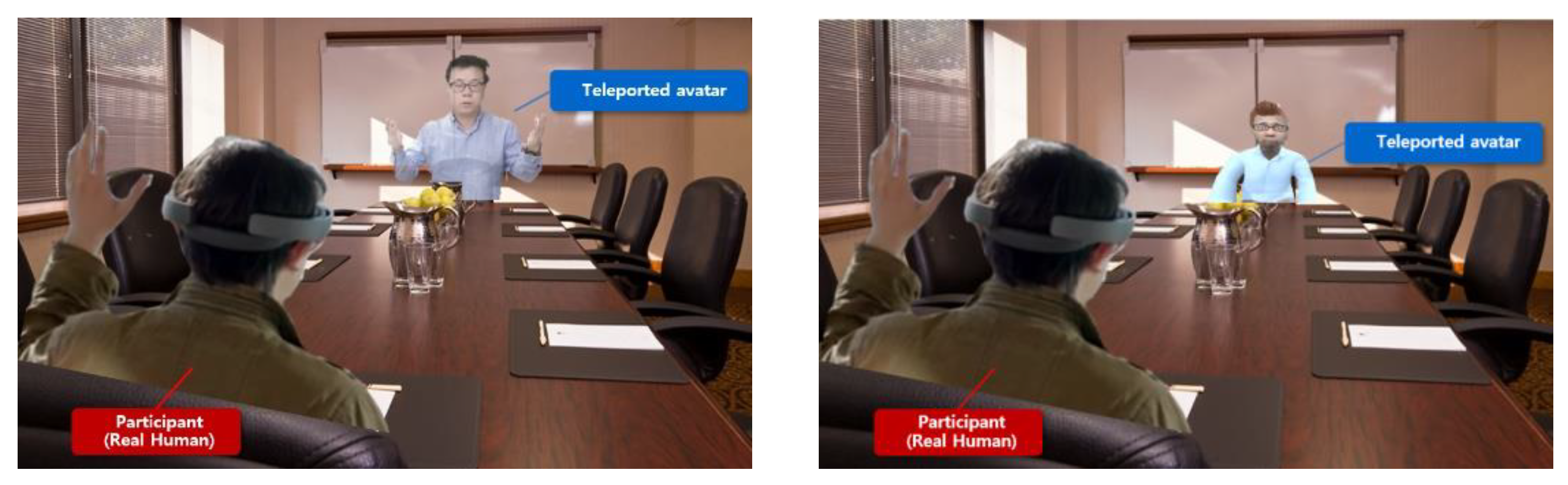
2.2. Mixed Reality (MR) Teleported Avatars
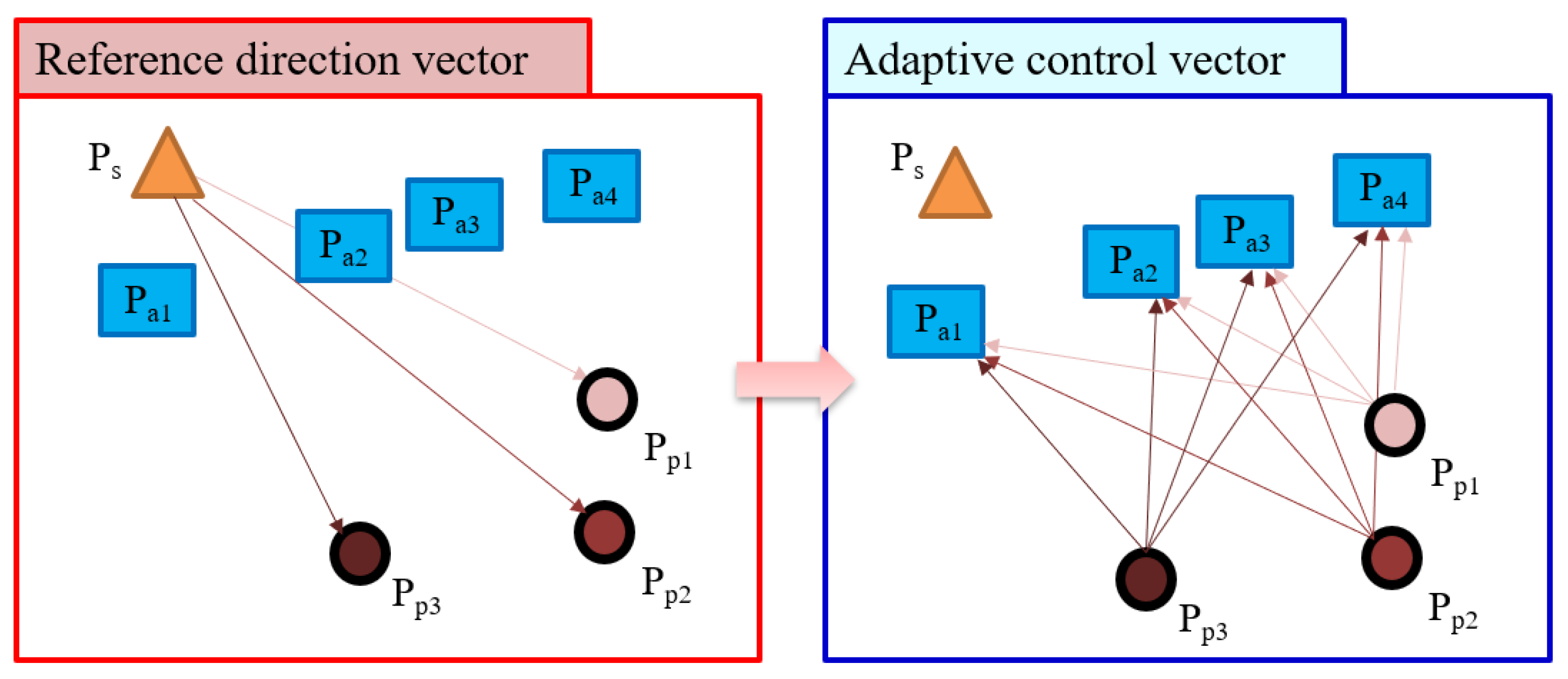
2.3. Adaptive Control in Collaborative Environments
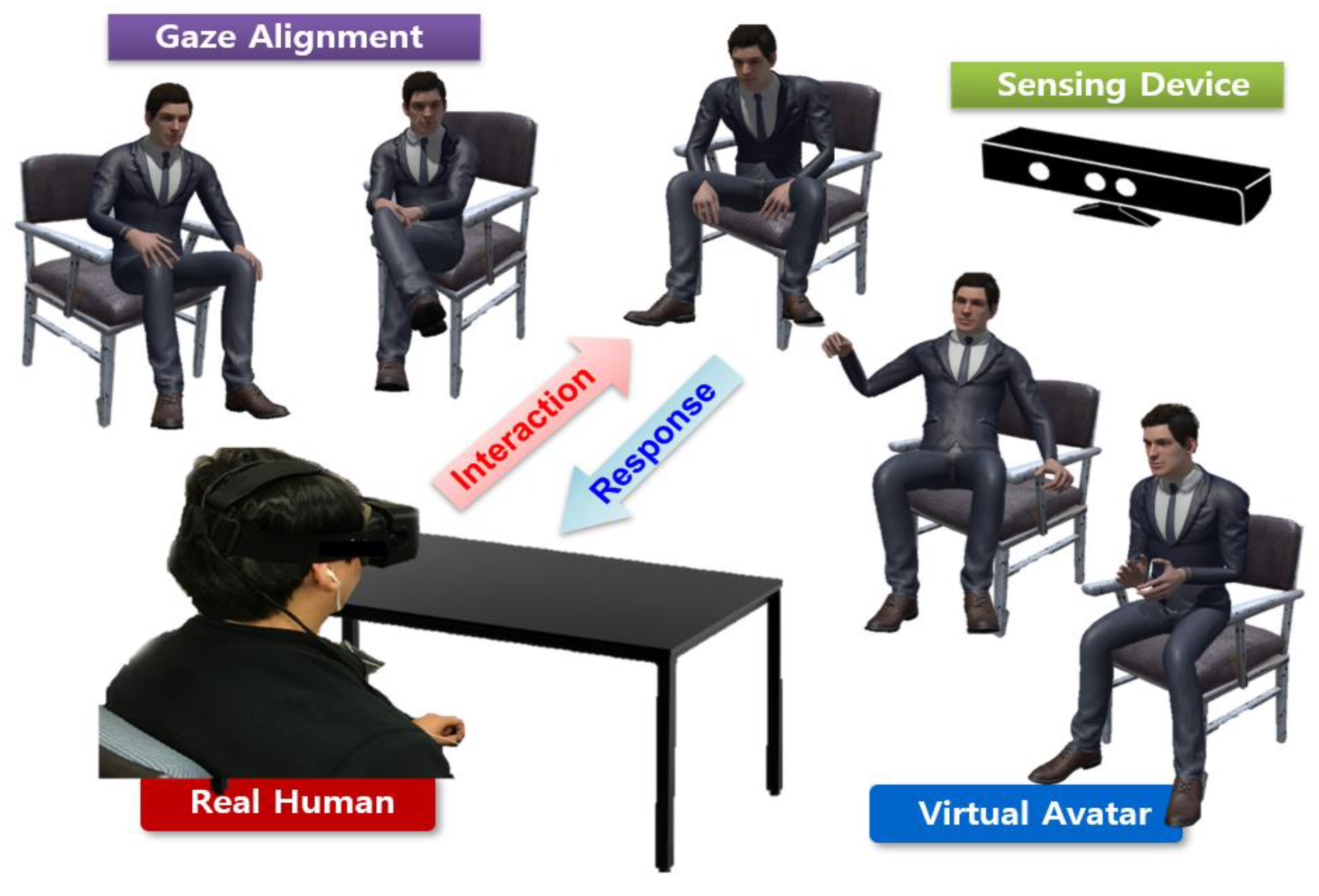
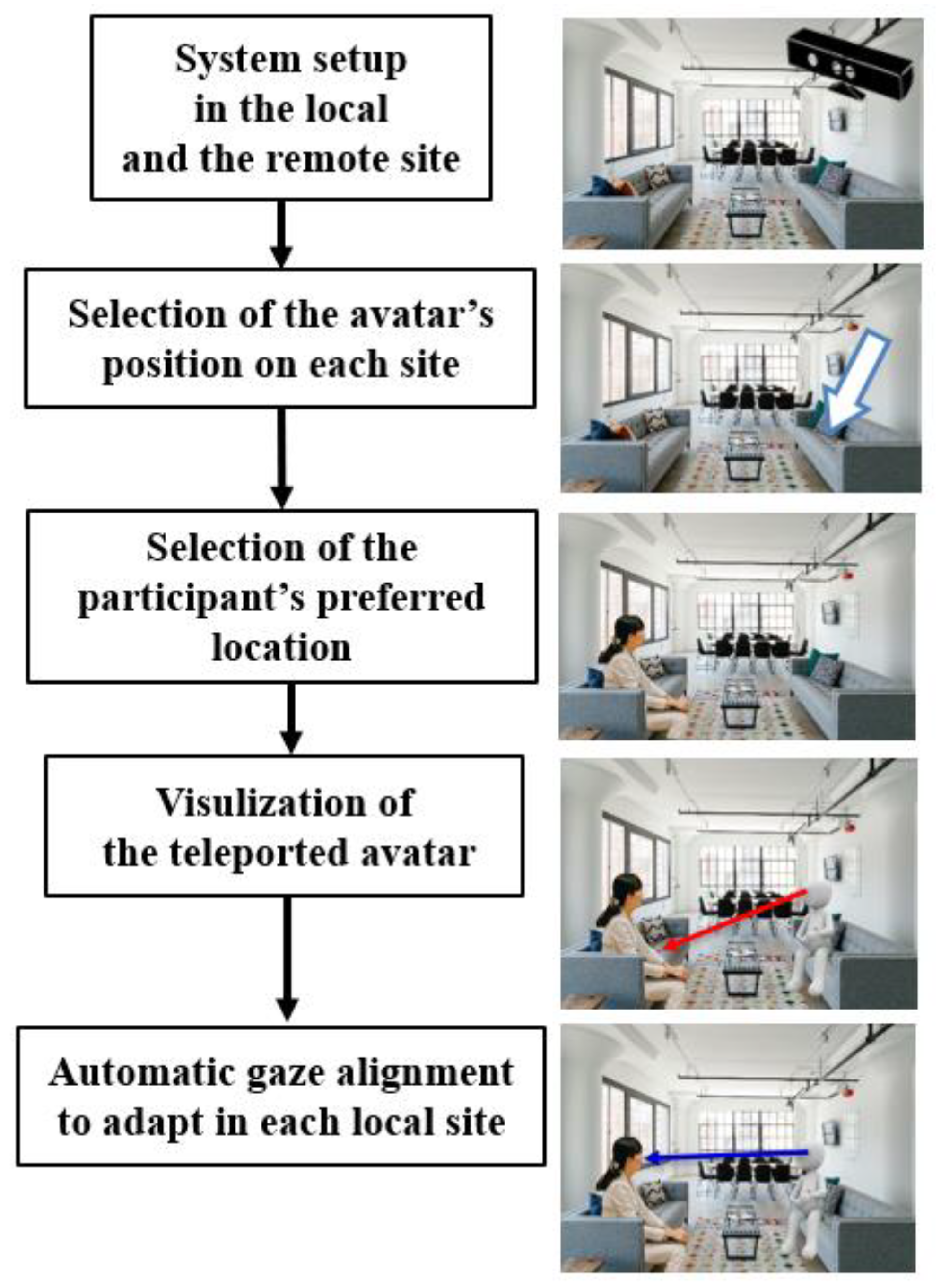
3. System Overview and Approach
4. Implementation
5. Experiments and Results
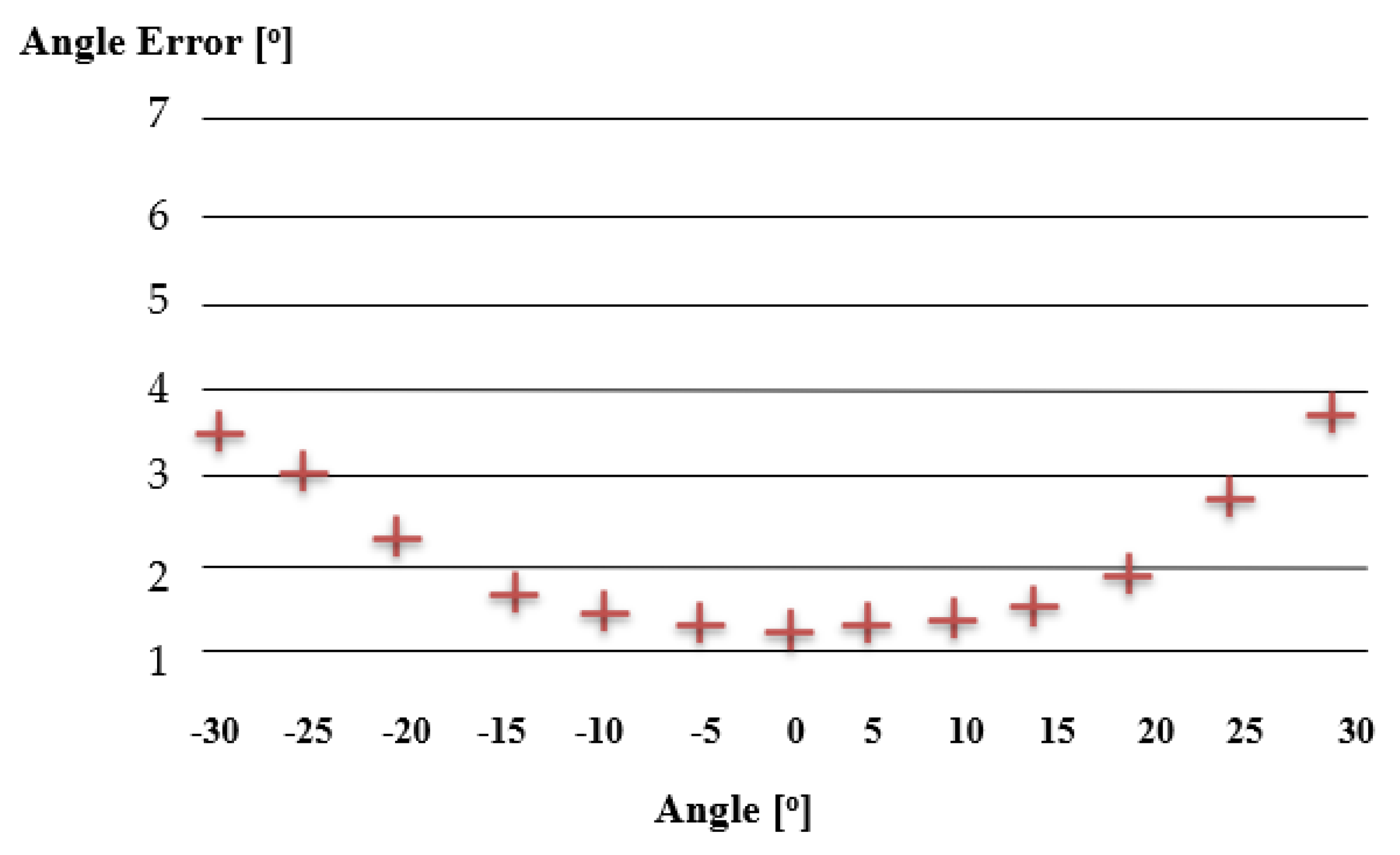
5.1. Experiments 1: Spatial Accuracy of Gaze
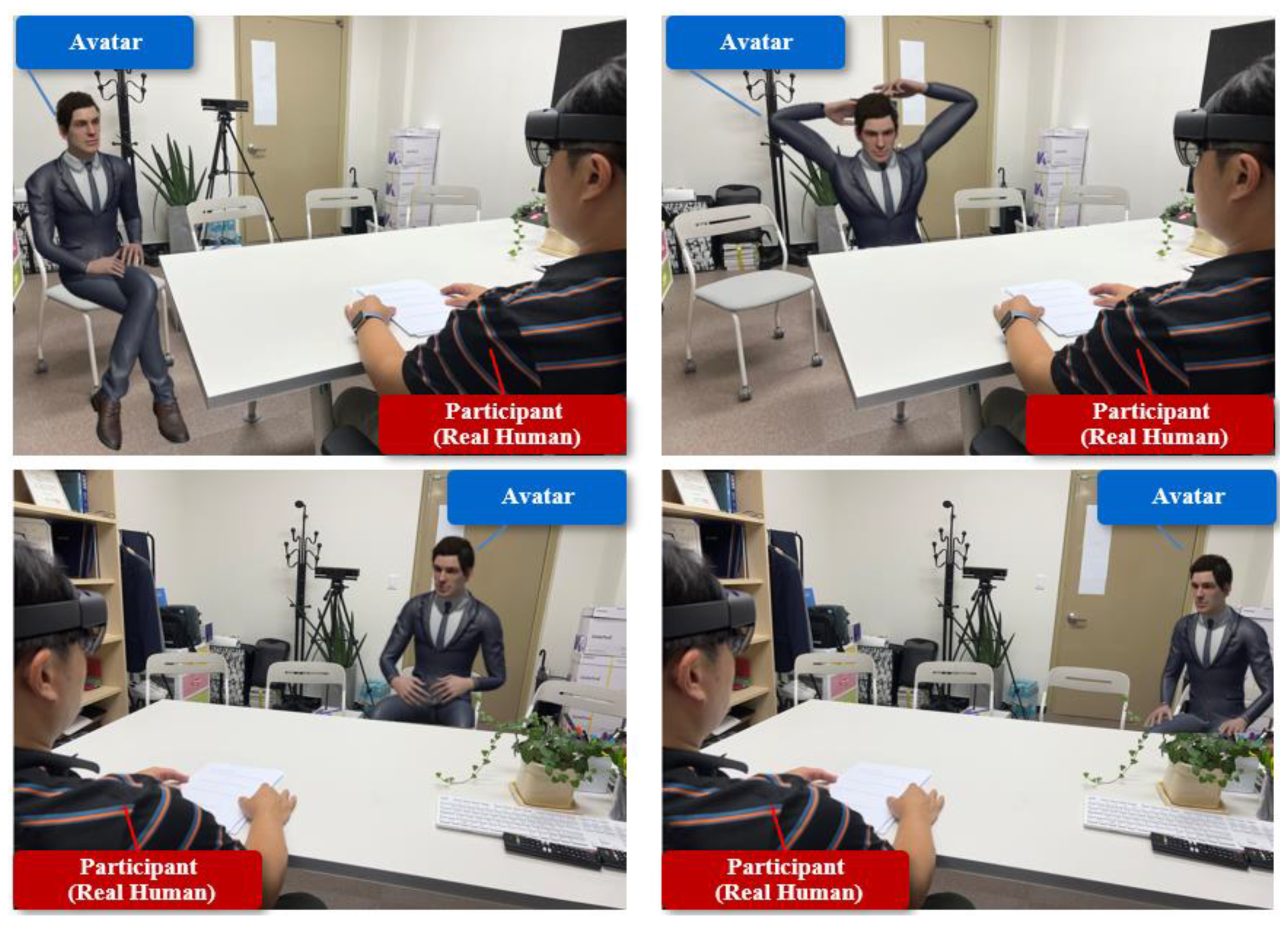
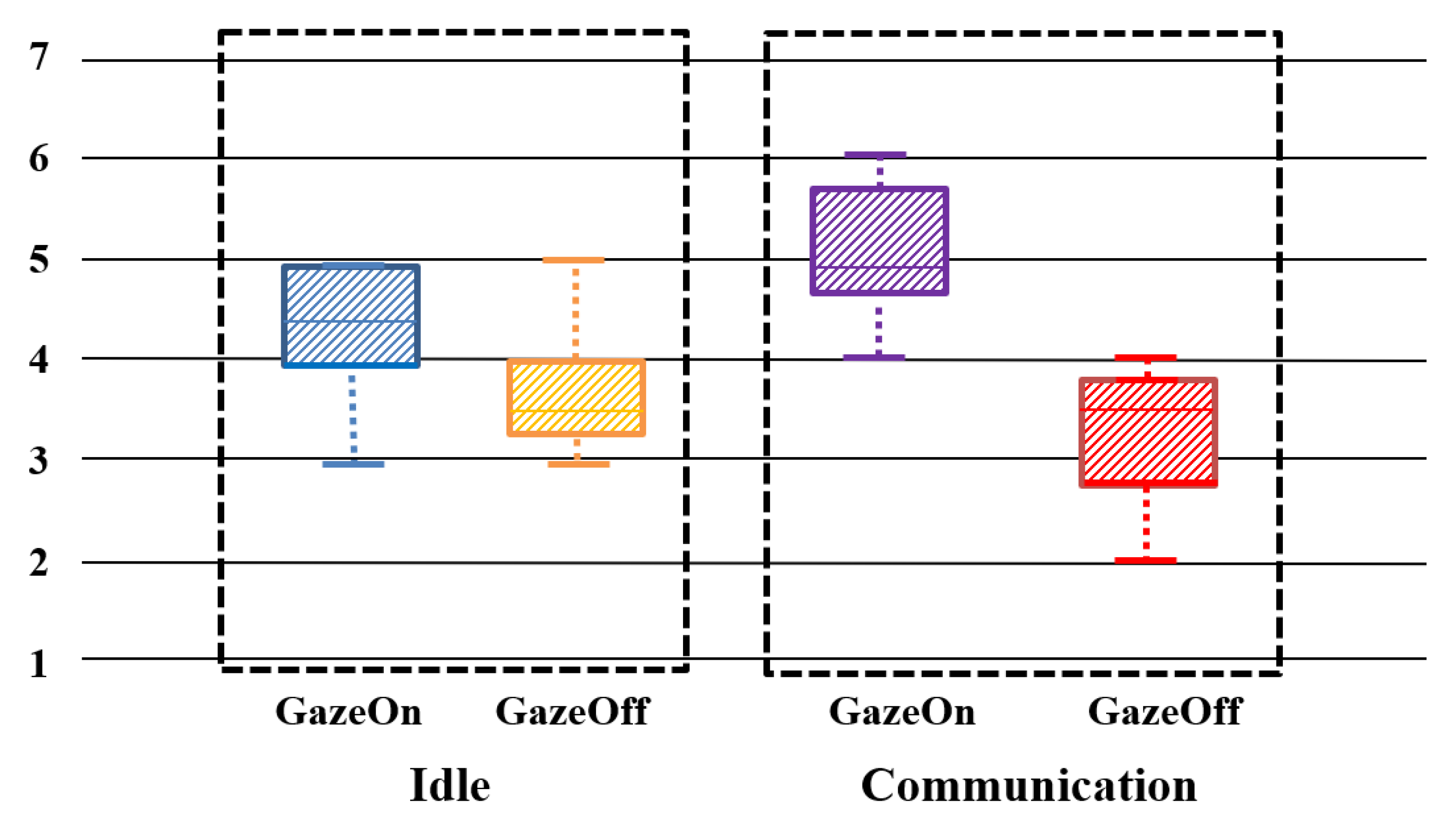
5.2. Experiments 2: Qualitative Co-Presence Comparison
5.3. Limitations
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jo, D.; Kim, K.-H.; Kim, G.J. Spacetime: Adaptive control of the teleported avatar for improved AR tele-conference experience. Comput. Animat. Virtual Worlds 2015, 26, 259–269. [Google Scholar] [CrossRef]
- Jo, D.; Kim, K.-H.; Kim, G.J. Effects of avatar and background types on users’ co-presence and trust for mixed reality-based teleconference systems. In Proceedings of the 30th Conference on Computer Animation and Social Agents (CASA), Seoul, Korea, 22–24 May 2017. [Google Scholar]
- Desilva, L.; Tahara, M.; Aizawa, K.; Hatori, M. A multiple person eye contact (MPEC) teleconferencing system. In Proceedings of the International Conference on Image Processing (ICIP), Washington, DC, USA, 23–26 October 1995. [Google Scholar]
- Gu, J.-Y.; Lee, J.-G. Augmented reality technology-based dental radiography simulator for preclinical training and education on dental anatomy. J. Inf. Commun. Converg. Eng. 2019, 17, 274–278. [Google Scholar]
- Rokhsaritalemi, S.; Niaraki, A.; Choi, S. A review on mixed reality: Current trends, challenges, and prospects. Appl. Sci. 2020, 10, 636. [Google Scholar] [CrossRef]
- Beck, S.; Kunert, A.; Kulik, A.; Froehlich, B. Immersive group-to-group telepresence. IEEE Trans. Vis. Comput. Graph. 2013, 19, 616–625. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S. Toward a taxonomy of copresence. Presence Teleoperators Virtual Environ. 2003, 12, 445–455. [Google Scholar] [CrossRef]
- Maimone, A.; Yang, X.; Dierk, N.; State, A.; Dou, M.; Fuchs, H. General-purpose telepresence with head-worn optical see-through displays and projector-based lighting. In Proceedings of the IEEE Virtual Reality, Orlando, FL, USA, 16–20 March 2013. [Google Scholar]
- Raskar, R.; Welch, G.; Cutts, M.; Lake, A.; Stesin, L.; Fuchs, H. The office of the future: A unified approach to image-based modeling and spatially immersive displays. In Proceedings of the SIGGRAPH, Orlando, FL, USA, 19–24 July 1998. [Google Scholar]
- Thalmann, N.M.; Yumak, Z.; Beck, A. Autonomous virtual humans and social robots in telepresence. In Proceedings of the 16th International Workshop on Multimedia Signal Processing (MMSP), Jakarta, Indonesia, 22–24 September 2014. [Google Scholar]
- Pluess, C.; Ranieri, N.; Bazin, J.-C.; Martin, T.; Laffont, P.-Y.; Popa, T.; Gross, M. An immersive bidirectional system for life-size 3D communication. In Proceedings of the 29th Computer Animation and Social Agents (CASA), Geneva, Switzerland, 23–25 May 2016. [Google Scholar]
- Pejsa, T.; Kantor, J.; Benko, H.; Ofek, E.; Wilson, A. Room2Room: Enabling life-size telepresence in a projected augmented reality environment. In Proceedings of the 19th ACM Conference on Computer-Supported Cooperative Work and Social Computing (CSCW), San Francisco, CA, USA, 27 February–2 March 2016. [Google Scholar]
- Jones, A.; Lang, M.; Fyffe, G.; Yu, X.; Busch, J.; Mcdowall, I.; Debevec, P. Achieving eye contact in a one-to-many 3D video teleconferencing system. ACM Trans. Graph. 2009, 28, 64. [Google Scholar] [CrossRef]
- Escolano, S.-O.; Rhemann, C.; Fanello, S.; Chang, W.; Kowdle, A.; Degtyarev, Y.; Kim, D.; Davidson, P.; Khamis, S.; Dou, M.; et al. Holoportation: Virtual 3D teleportation in real-time. In Proceedings of the ACM UIST, 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016. [Google Scholar]
- Feng, A.; Shapiro, A.; Ruizhe, W.; Bolas, M.; Medioni, G.; Suma, E. Rapid avatar capture and simulation using commodity depth sensors. In Proceedings of the SIGGRAPH, Vancouver, BC, Canada, 10–14 August 2014. [Google Scholar]
- Feng, A.; Casas, D.; Shapiro, A. Avatar reshaping and automatic rigging using a deformable model. In Proceedings of the 8th ACM SIGGRAPH Conference on Motion in Games (MIG), Paris, France, 16–18 November 2015. [Google Scholar]
- Kim, K.; Boelling, L.; Haesler, S.; Bailenson, J.N.; Bruder, G.; Welch, G.F. Does a Digital Assistant Need a Body? The Influence of Visual Embodiment and Social Behavior on the Perception of Intelligent Virtual Agents in AR. In Proceedings of the 17th IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Munich, Germany, 16–20 October 2018. [Google Scholar]
- Rolland, J.P.; Henri, F. Optical versus video see-through head-mounted displays in medical visualization. Presence Teleoperators Virtual Environ. 2000, 9, 287–309. [Google Scholar] [CrossRef]
- Lehment, N.; Merget, D.; Rigoll, G. Creating automatically aligned consensus realities for AR videoconferencing. In Proceedings of the IEEE International Symposium on Mixed and Augmented Reality (ISMAR), Munich, Germany, 10–12 September 2014. [Google Scholar]
- Taylor, M.; Itier, R.; Allison, T.; Edmonds, G. Direction of gaze effects on early face processing: Eyes-only versus full faces. Cogn. Brain Res. 2001, 10, 333–340. [Google Scholar] [CrossRef]
- Pan, Y.; Steptoe, W.; Steed, A. Comparing flat and spherical displays in a trust scenario in avatar-mediated interaction. In Proceedings of the SIGCHI Conference on Human Factors in Computing System, Toronto, Canada, 26 April–1 May 2014. [Google Scholar]
- Erickson, A.; Norouzi, N.; Kim, K.; Bruder, G.; Welch, G. Effects of depth information on visual target identification task performance in shared gaze environments. IEEE Trans. Vis. Comput. Graph. 2020, 26, 1934–1944. [Google Scholar] [CrossRef] [PubMed]
- Zeng, W. Microsoft Kinect sensor and its effect. IEEE Multimed. 2012, 19, 4–10. [Google Scholar] [CrossRef]
- Soares, I.; Sousa, R.; Petry, M.; Moreira, A. Accuracy and repeatability tests on HoloLens 2 and HTC Vive. Multimodal Technol. Interact. 2021, 5, 47. [Google Scholar] [CrossRef]
- Xianwen, Z. Behavior tree design of intelligent behavior of non-player character (NPC) based on Unity3D. J. Intell. Fuzzy Syst. 2019, 37, 6071–6079. [Google Scholar]
- Choi, C. A case study of short animation production using third party program in university animation curriculum. Int. J. Internet Broadcast. Commun. 2021, 13, 97–102. [Google Scholar]
- Tolgyessy, M.; Dekan, M.; Chovanec, L.; Hubinsky, P. Evaluation of the Azure Kinect and its comparison to Kinect V1 and Kinect V2. Sensors 2021, 21, 413. [Google Scholar] [CrossRef]
- Kurillo, G.; Hemingway, E.; Cheng, M.; Cheng, L. Evaluating the accuracy of the Azure Kinect and Kinect V2. Sensor 2022, 22, 2469. [Google Scholar] [CrossRef] [PubMed]
- Paludan, A.; Elbaek, J.; Mortensen, M.; Zobbe, M. Disquising rotational gain for redirected walking in virtual reality: Effect of visual density. In Proceedings of the IEEE Virtual Reality, Greenville, SC, USA, 19–23 March 2016. [Google Scholar]
- Kim, D.; Jo, D. Effects on co-presence of a virtual human: A comparison of display and interaction types. Electronics 2022, 11, 367. [Google Scholar] [CrossRef]
- Shin, K.-S.; Kim, H.; Jo, D. Exploring the effects of the virtual human and physicality on co-presence and emotional response. J. Korea Soc. Comput. Inf. 2019, 24, 67–71. [Google Scholar]
- Joshi, A.; Kale, S.; Chandel, S.; Pal, D. Likert scale: Explored and explained. Curr. J. Appl. Sci. Technol. 2015, 7, 396–403. [Google Scholar] [CrossRef]
- Slater, M. Measuring presence: A response to the Witmer and Singer presence questionnaire. Presence Teleoperators Virtual Environ. 1999, 8, 560–565. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Conditions | Gaze Matching | Scenario |
|---|---|---|
| GazeOn_Idle | Consistency | No conversation |
| GazeOff_Idle | Inconsistency | No conversation |
| GazeOn_Communication | Consistency | Have a conversation |
| GazeOff_Communication | Inconsistency | Have a conversation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, J.-H.; Jo, D. AnyPlace: Automatic Gaze Alignment of the Teleported Avatar for MR Collaborative Environments. Appl. Sci. 2022, 12, 9154. https://doi.org/10.3390/app12189154
Chung J-H, Jo D. AnyPlace: Automatic Gaze Alignment of the Teleported Avatar for MR Collaborative Environments. Applied Sciences. 2022; 12(18):9154. https://doi.org/10.3390/app12189154
Chicago/Turabian StyleChung, Jin-Ho, and Dongsik Jo. 2022. "AnyPlace: Automatic Gaze Alignment of the Teleported Avatar for MR Collaborative Environments" Applied Sciences 12, no. 18: 9154. https://doi.org/10.3390/app12189154
APA StyleChung, J.-H., & Jo, D. (2022). AnyPlace: Automatic Gaze Alignment of the Teleported Avatar for MR Collaborative Environments. Applied Sciences, 12(18), 9154. https://doi.org/10.3390/app12189154