
Safe, Smooth, and Fair Rule-Based Cooperative Lane Change Control for Sudden Obstacle Avoidance on a Multi-Lane Road †



Abstract
:1. Introduction
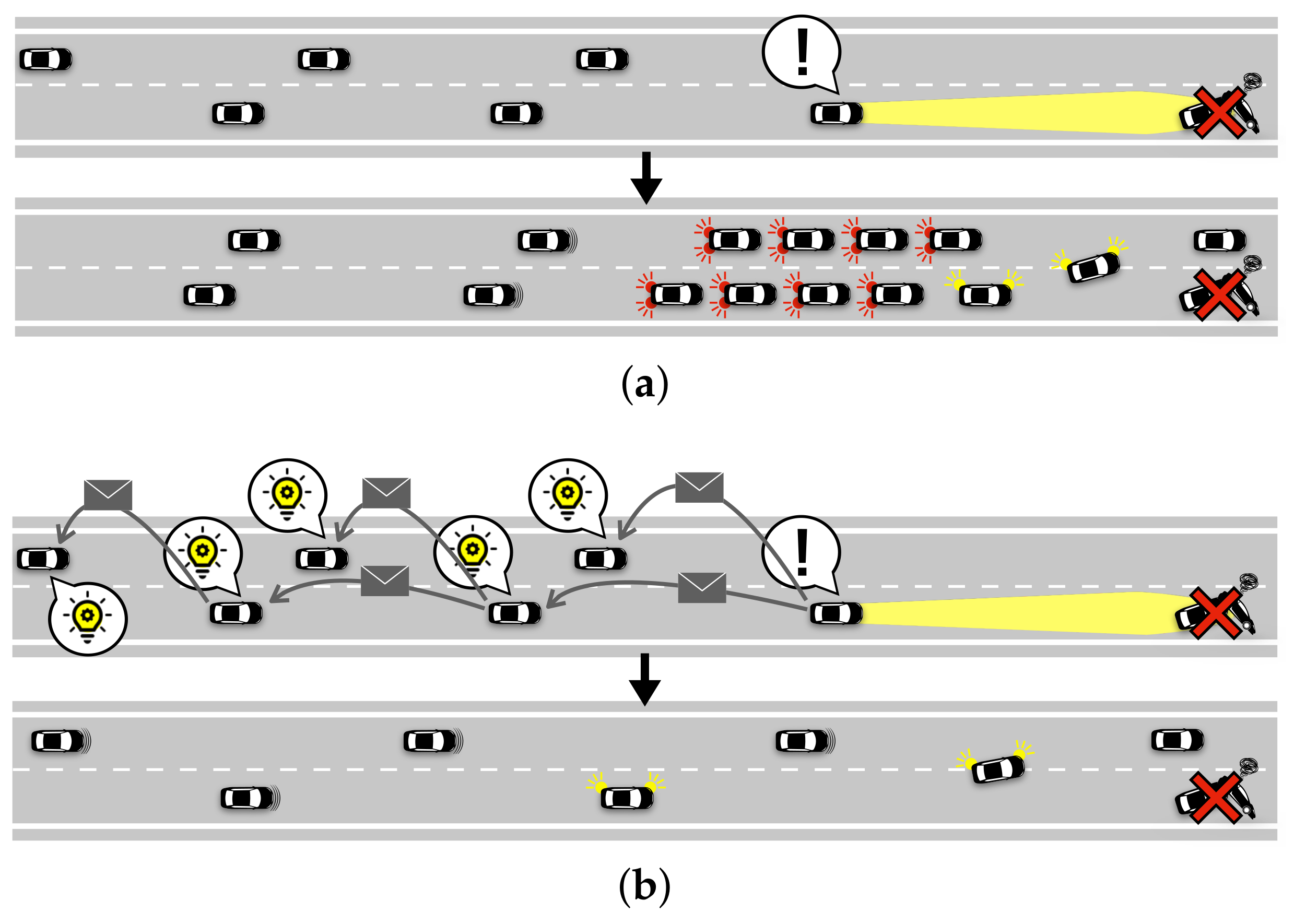
- We propose a method to realize safe, smooth, and fair wide-range cooperative lane changing, reacting to a suddenly appearing obstacle on the road. In this strategy, a CV that detects the obstacle immediately notifies the following vehicles of the obstacle by using V2V communication. In turn, the following vehicles can take action to avoid the obstacle smoothly using a wide range behind the obstacle without sacrificing safety and ride comfort. To the authors’ knowledge, existing studies focus on microscopic control around obstacles and do not discuss the control of traffic in a wide range, a few kilometers, as addressed in this study. The microscopic operation for lane-changing trajectory planning is out of this paper’s scope.
- The proposed method works when one lane is obstructed on a three- or more lane road. On three- or more lane roads, vehicles can have multiple choices to change lanes. Thus, we develop a method to select a suitable lane that will not cause unfairness among lanes and deteriorate ride comfort.
- We confirm the effectiveness of the proposed method in realizing fairness among lanes, safety, ride comfort, and traffic throughput through simulations of a two-lane road and a three-lane road with various traffic scenarios, assuming that the vehicles’ microscopic operation depends on the lane change model of SUMO.
- The road length in the simulation environment is increased from to in order to provide sufficient free space before vehicles encounter an obstacle.
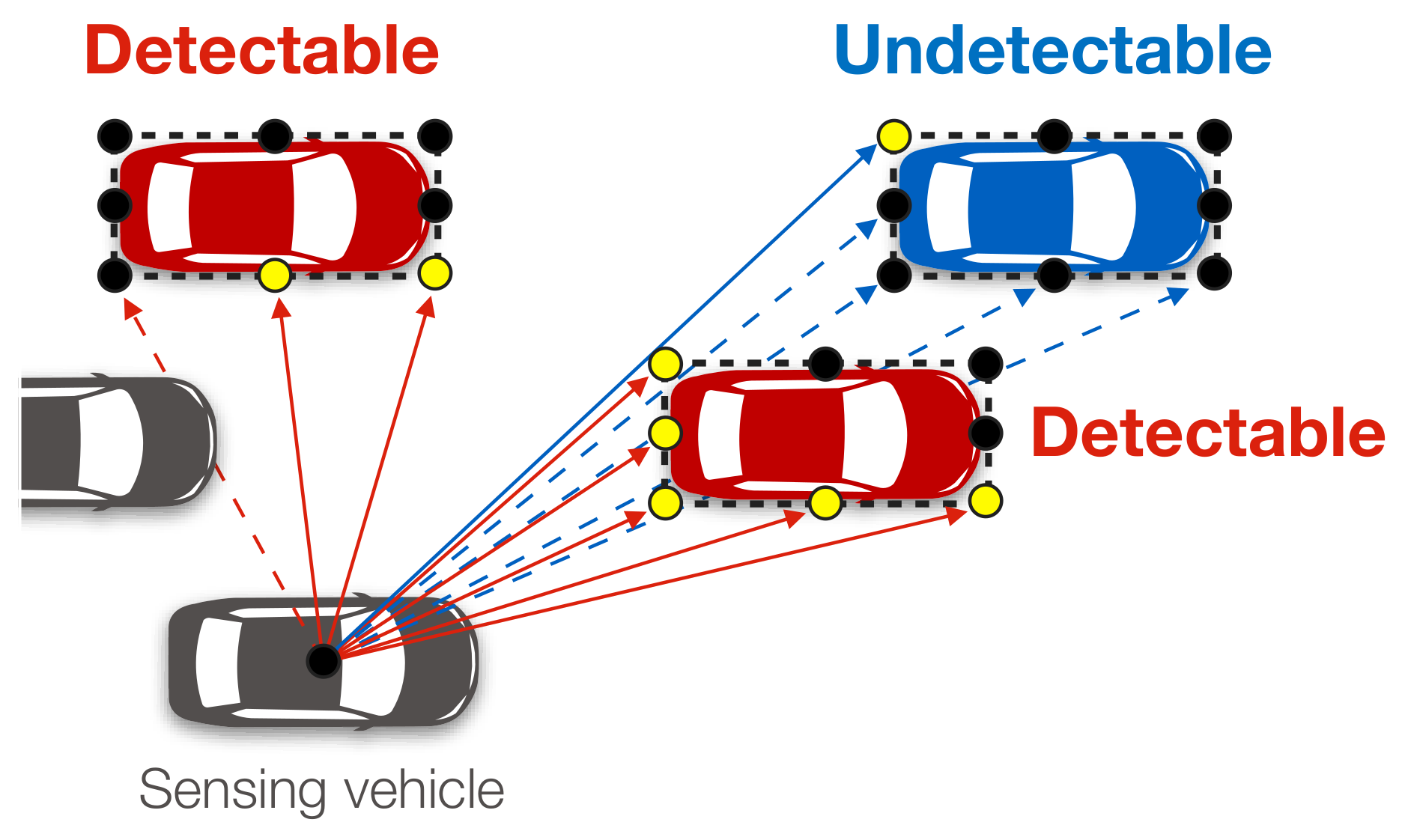
- The simulations consider occlusion in a vehicle detection model.
- Two vehicle behavior models (Proposed_NoPrelim and Proposed_NoAdaptive) are introduced to confirm the effectiveness of the proposed scheme.
- A fairness equation is introduced to quantitatively evaluate the fairness level in the simulation evaluation.
- A safety metric is introduced in the simulation evaluation.
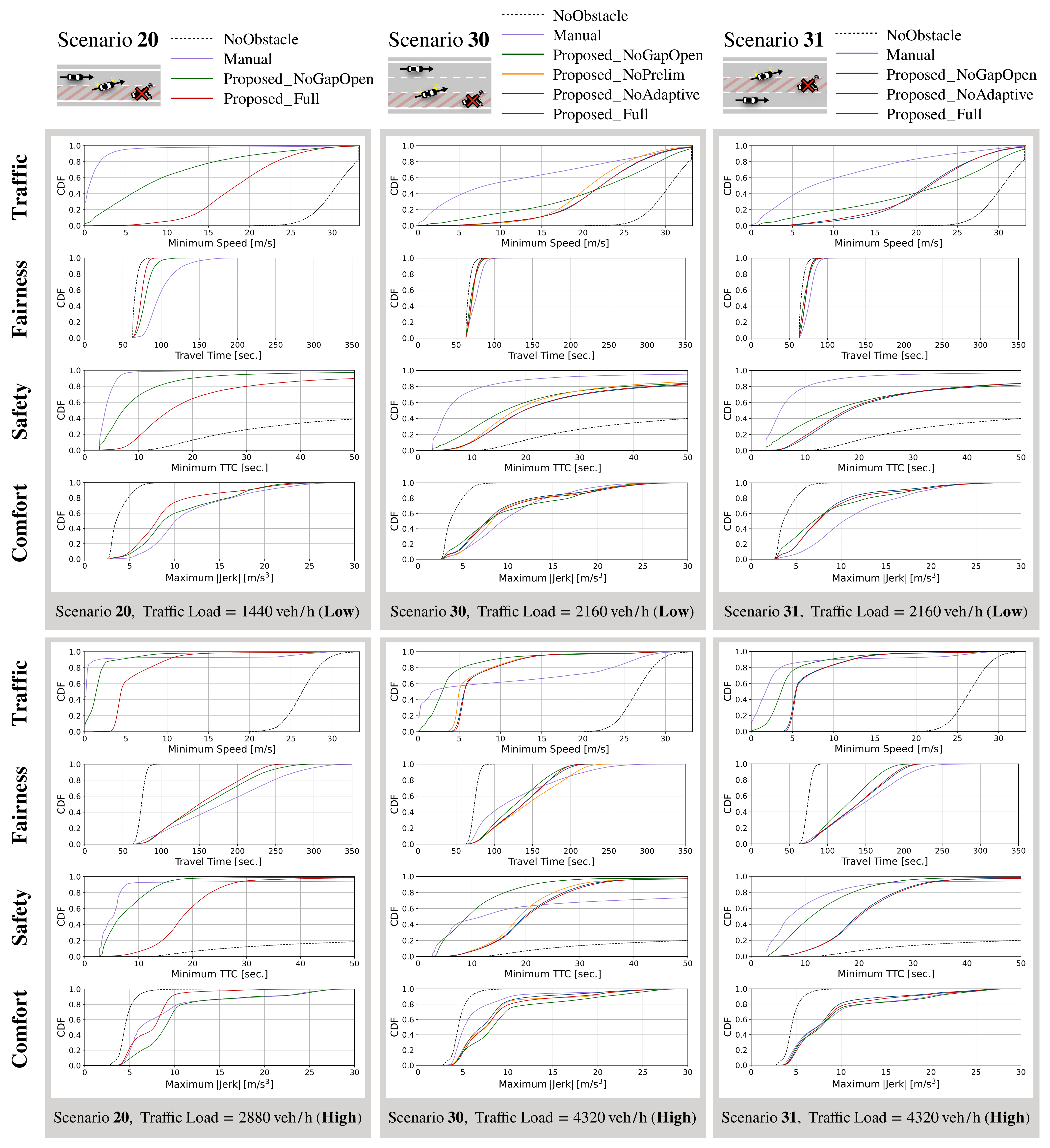
- Cumulative distribution function (CDF) graphs are created for each performance metric to analyze the simulation results in more detail.
- Simulations are conducted with various traffic loads to evaluate the performance of the proposed method comprehensively and with various zone sizes of the proposed scheme to investigate the impact of the zone sizes.
2. Related Work
3. Proposed Scheme
3.1. Assumed Environment
- Vehicles are equipped with sensors such as cameras and LiDAR, which can detect vehicles, road structures, and obstacles.
- Vehicles are equipped with a V2V communication function and are operated by an automatic driving system or a human driver who follows instructions given by a driving assistant system.
- The position, speed, and acceleration of the vehicle are shared among the vehicles within the wireless communication range. Vehicles periodically broadcast messages that include such driving information.
- Each vehicle changes lanes safely when it enters a zone where it is allowed to change. This paper does not specify the detailed trajectory planning technique on lane changing. We assume that the lane changing model used SUMO in the simulations. The actual timing of starting the lane change maneuver of each vehicle depends on the model.
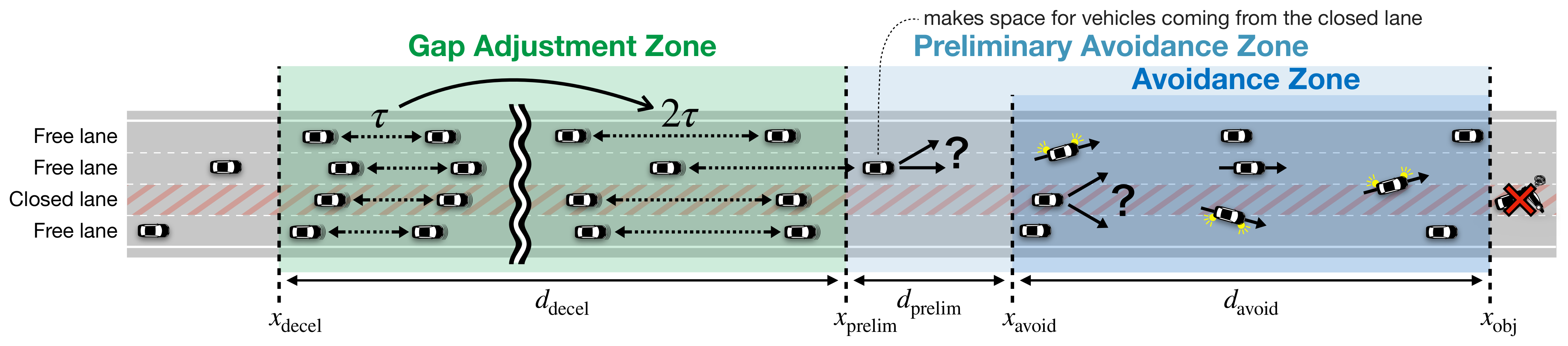
3.2. Basic Strategy
3.3. Obstacle Detection Notification
3.4. Adjusting Time Headway
3.5. Adaptive Lane Change
4. Simulation Model
4.1. Environment Settings

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Simulation time | |
| Time step length | |
| (avoidance zone size) | 10–500 m |
| (preliminary avoidance zone size) | 0–300 m |
| (gap adjustment zone size) | 0–1000 m |
| for adjusting time headway | () [25] |
| Threshold L for avoiding congested lanes | 0.6 |
| Available sensing range | [26] |
| V2V communication range | [24] |
| Traffic load input value for 2-lane scenario | 720–3600 vehicles/h |
| Traffic load input value for 3-lane scenario | 720–5400 vehicles/h |
| CV penetration ratio | 0.0–1.0 |
| Broadcast interval | |
| Validity period of the obstacle information | |
| Vehicle length, vehicle width | , |
| Min. inter-vehicular distance | |
| Regular inter-vehicular gap () | |
| Gap open ratio | 2.0 |
| Lane change duration | |
| LC2013 lane change mode | 1621 |
| Initial speed, road speed limit | , |
| Max. acceleration, max. deceleration | , |
4.2. Lane-Changing Model
- Strategic change: Changing lanes to reach a destination (e.g., moving to the left lane to make a left turn).
- Cooperative change: Changing lanes to help another vehicle change lanes (e.g., changing lanes to make space for merging vehicles at a merge point).
- Tactical change: Changing lanes to move faster (e.g., overtaking).
- Regulatory change: Changing lanes to comply with regulations and laws (e.g., changing lanes to avoid driving continuously in an overtaking lane).
4.3. Vehicle Detection Model
4.4. Vehicle Behavior Models
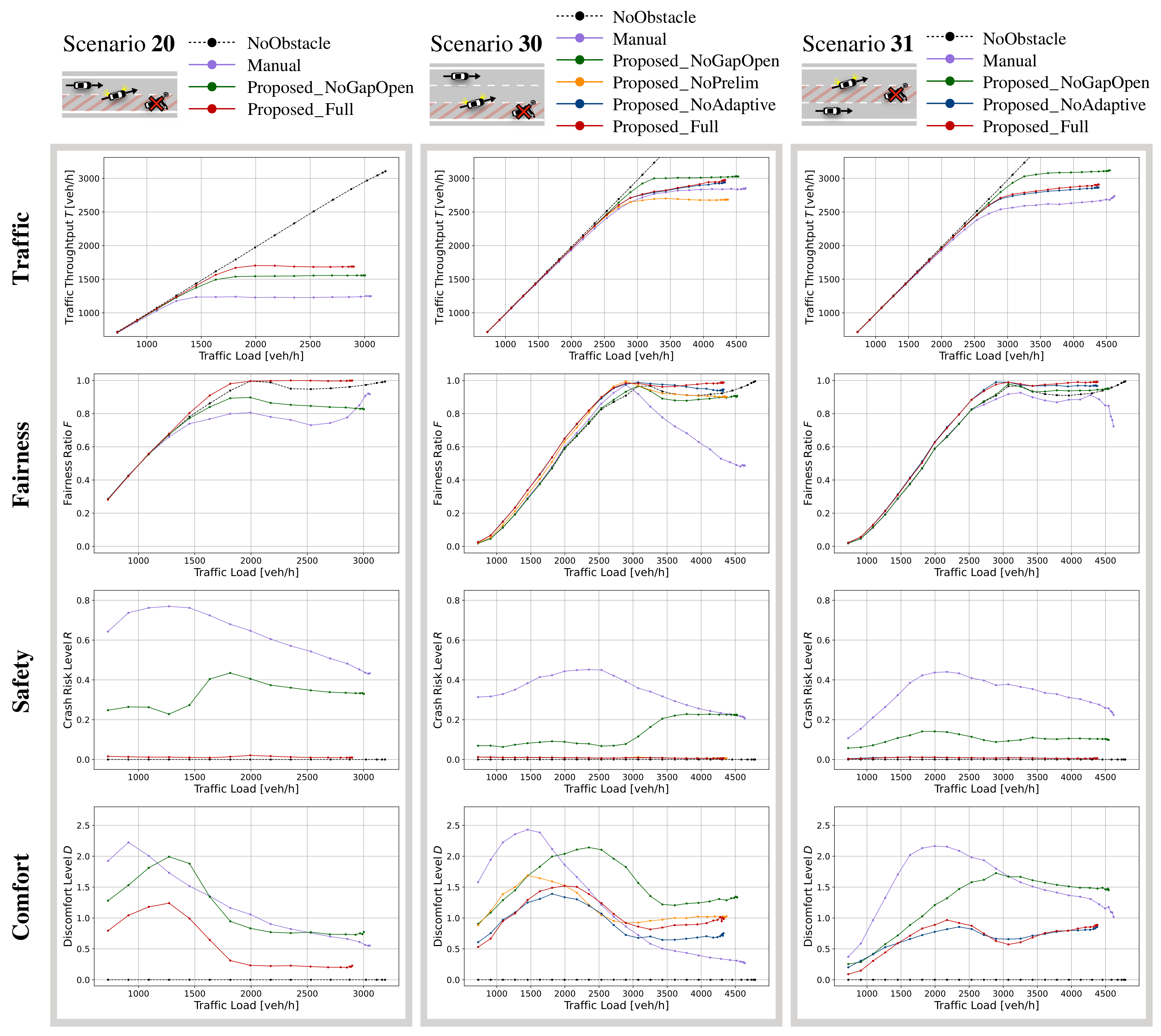
- Proposed_Full: CVs follow the proposed scheme.
- Proposed_NoAdaptive: Simplified version of Proposed_Full. Vehicles randomly select a destination lane from two destination lane candidates.
- Proposed_NoPrelim: Simplified version of Proposed_Full. .
- Proposed_NoGapOpen: Simplified version of Proposed_Full. The function of adjusting time headway is disabled.
- Manual: Human-driven vehicle (i.e., NCV) model. Vehicles change lanes to avoid obstacles only when they directly detect an obstacle. If there are lanes on both sides, vehicles in the closed lane randomly select a destination lane.
4.5. Performance Metrics
4.5.1. Traffic
4.5.2. Fairness
4.5.3. Safety
4.5.4. Comfort
5. Simulation Results and Discussion
5.1. Effect of Cooperative Lane Change
- Sharing information about the obstacle through V2V communication allows vehicles to adjust their speed and change lanes in advance, preventing rapid deceleration.
- Adjusting the time headway of vehicles in advance is effective at significantly improving safety and comfort level in obstacle avoidance.
- Shifting the lane change timing between vehicles in the closed lane and vehicles in the free lane by introducing a preliminary avoidance zone is effective in facilitating obstacle avoidance.
- The proposed scheme achieves sufficiently high traffic throughput without degrading fairness, safety, or comfort level in the most balanced way. Note that we assume that vehicles’ microscopic operation depends on the lane change model of SUMO. Therefore, the performance of the proposed scheme may vary depending on trajectory planning.
5.2. Impact of the CV Penetration Ratio
5.3. Impact of the Zone Sizes
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- National Highway Traffic Safety Administration, Vehicle-to-Vehicle Communication. Available online: https://www.nhtsa.gov/technology-innovation/vehicle-vehicle-communication (accessed on 16 August 2022).
- Persaud, B.; Yagar, S.; Brownlee, R. Exploration of the Breakdown Phenomenon in Freeway Traffic. J. Transp. Res. Rec. 1998, 1634, 64–69. [Google Scholar] [CrossRef]
- Sugiyama, Y.; Fukui, M.; Kikuchi, M.; Hasebe, K.; Nakayama, A.; Nishinari, K.; Tadaki, S.; Yukawa, S. Traffic jams without bottlenecks-experimental evidence for the physical mechanism of the formation of a jam. New J. Phys. 2008, 10, 033001. [Google Scholar] [CrossRef]
- Google Maps. Available online: https://www.google.com/maps/ (accessed on 16 August 2022).
- Waze: Driving Directions, Live Traffic & Road Conditions Updates. Available online: https://www.waze.com/ja/live-map/ (accessed on 16 August 2022).
- Vehicle Information and Communication System. Available online: https://www.vics.or.jp/en/ (accessed on 16 August 2022).
- Ishihara, S. Cooperative Lane Change Control for Sudden Obstacle Avoidance on a Multilane Road. In Proceedings of the ITS Symposium, Ishikawa, Japan, 12–13 December 2019. [Google Scholar]
- Simulation of Urban Mobility (SUMO). Available online: http://sumo.dlr.de/wiki/ (accessed on 16 August 2022).
- Asano, S.; Ishihara, S. Rule-Based Cooperative Lane Change Control to Avoid a Sudden Obstacle in a Multi-Lane Road. In Proceedings of the 2022 IEEE 95th Vehicular Technology Conference, Helsinki, Finland, 19–22 June 2022. [Google Scholar]
- Desiraju, D.; Chantem, T.; Heaslip, K. Minimizing the Disruption of Traffic Flow of Automated Vehicles During Lane Changes. IEEE Trans. Intell. Transp. Syst. 2016, 16, 1249–1258. [Google Scholar] [CrossRef]
- Wang, D.; Hu, M.; Wang, Y.; Wang, J.; Qin, H.; Bian, Y. Model predictive control-based cooperative lane change strategy for improving traffic flow. Adv. Mech. Eng. 2016, 8, 1–17. [Google Scholar] [CrossRef]
- Luo, Y.; Yang, G.; Xu, M.; Qin, Z.; Li, K. Cooperative Lane-Change Maneuver for Multiple Automated Vehicles on a Highway. Automot. Innov. 2019, 2, 157–168. [Google Scholar] [CrossRef]
- Li, T.; Wu, J.; Chan, C.Y.; Liu, M.; Zhu, C.; Lu, W.; Hu, K. A Cooperative Lane Change Model for Connected and Automated Vehicles. IEEE Access 2020, 8, 54940–54951. [Google Scholar] [CrossRef]
- CAR 2 CAR Communication Consortium (C2C-CC), Guidance for Day 2 and Beyond Roadmap. Available online: https://www.car-2-car.org/fileadmin/documents/General_Documents/C2CCC_WP_2072_RoadmapDay2AndBeyond.pdf (accessed on 16 August 2022).
- Gunther, H.; Trauer, O.; Wolf, L. The Potential of Collective Perception in Vehicular Ad-Hoc Networks. In Proceedings of the 2015 14th International Conference on ITS Telecommunications, Copenhagen, Denmark, 2–4 December 2015. [Google Scholar]
- Federal Highway Administration (FHWA), CARMA Program Overview. Available online: https://highways.dot.gov/research/operations/CARMA (accessed on 16 August 2022).
- Tiernan, T.; Bujanovic, P.; Azeredo, P.; Najm, W.G.; Lochrane, T. CARMA Testing and Evaluation of Research Mobility Applications; U.S. Department of Transportation, Federal Highway Administration: San Francisco, CA, USA, 2019.
- Ding, J.; Li, L.; Peng, H.; Zhang, Y. A Rule-Based Cooperative Merging Strategy for Connected and Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2020, 21, 3436–3446. [Google Scholar] [CrossRef]
- Jing, S.; Hui, F.; Zhao, X.; Rios-Torres, J.; Khattak, A.J. Cooperative Game Approach to Optimal Merging Sequence and on-Ramp Merging Control of Connected and Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2019, 20, 4234–4244. [Google Scholar] [CrossRef]
- Multi-Car Collision Avoidance (MuCCA). Available online: https://mucca-project.co.uk (accessed on 16 August 2022).
- Wartnaby, C.; Bellan, D. Decentralised Cooperative Collision Avoidance with Reference-Free Model Predictive Control and Desired Versus Planned Trajectories. arXiv 2019, arXiv:1904.07053. [Google Scholar]
- Bae, S.Y.; Saxena, D.M.; Nakhaei, A.; Choi, C.; Fujimura, K.; Moura, S.J. Cooperation-Aware Lane Change Maneuver in Dense Traffic based on Model Predictive Control with Recurrent Neural Network. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020. [Google Scholar]
- Wegener, A.; Piorkowski, M.; Raya, M.; Hellbruck, H.; Fischer, S.; Hubaux, J. TraCI: An Interface for Coupling Road Traffic and Network Simulators. In Proceedings of the 11th Communications and Networking Simulation Symposium (CNS), Ottawa, ON, Canada, 14–17 April 2008. [Google Scholar]
- Xu, Q.; Mak, T.; Ko, J.; Sengupta, R. Vehicle-to-vehicle safety messaging in DSRC. In Proceedings of the 1st ACM International Workshop on Vehicular Ad Hoc Networks, Philadelphia, PA, USA, 1 October 2004. [Google Scholar]
- Deligianni, S.; Quddus, M.; Morris, A.; Anvuur, A.; Reed, S. Analyzing and Modeling Drivers’ Deceleration Behavior from Normal Driving. Transp. Res. Rec. J. Transp. Res. Board 2017, 2663, 134–141. [Google Scholar] [CrossRef]
- Texas Instruments. An Introduction to Automotive LIDAR. Available online: https://www.ti.com/lit/wp/slyy150a/slyy150a.pdf (accessed on 16 August 2022).
- Krauss, S.; Wagner, P.; Gawron, C. Metastable States in a Microscopic Model of Traffic Flow. Phys. Rev. E 1997, 55, 5597–5602. [Google Scholar] [CrossRef]
- Erdmann, J. SUMO’s Lane-Changing Model. In Modeling Mobility with Open Data; Lecture Notes in Mobility; Springer: Berlin/Heidelberg, Germany, 2015; pp. 105–123. [Google Scholar]
- Minderhoud, M.M.; Bovy, P.H.L. Extended Time-To-Collision Measures for Road Traffic Safety Assessment. Accid. Anal. Prev. 2001, 33, 89–97. [Google Scholar] [CrossRef]
- Vogel, K. A Comparison of Headway and Time to Collision as Safety Indicators. Accid. Anal. Prev. 2003, 35, 427–433. [Google Scholar] [CrossRef]
- Wang, F.; Segawa, K.; Inooka, H. A Study of the Relationship between the Longitudinal Acceleration/Deceleration of Automobiles and Ride Comfort. Jpn. J. Ergon. 2000, 36, 191–200. [Google Scholar]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1638. [Google Scholar] [CrossRef]










| Lane Type | Index | No. of Vehicles | Ideal No. of Vehicles | Move to the Next Lane to the Right | Move to the Next Lane to the Left | Continue Straight Ahead |
|---|---|---|---|---|---|---|
| Free (left edge) | ||||||
| Free | ||||||
| Free | ||||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| Free | ||||||
| Closed | c | 0 | ||||
| Free | ||||||
| ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ | ⋮ |
| Free | 2 | |||||
| Free | 1 | |||||
| Free (right edge) | 0 |
| Lane Type | Index | No. of Vehicles | Ideal No. of Vehicles | Move to the Next Lane to the Right | Move to the Next Lane to the Left | Continue Straight Ahead |
|---|---|---|---|---|---|---|
| Free (left edge) | 2 | |||||
| Free | 1 | |||||
| Closed (right edge) | 0 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Asano, S.; Ishihara, S. Safe, Smooth, and Fair Rule-Based Cooperative Lane Change Control for Sudden Obstacle Avoidance on a Multi-Lane Road. Appl. Sci. 2022, 12, 8528. https://doi.org/10.3390/app12178528
Asano S, Ishihara S. Safe, Smooth, and Fair Rule-Based Cooperative Lane Change Control for Sudden Obstacle Avoidance on a Multi-Lane Road. Applied Sciences. 2022; 12(17):8528. https://doi.org/10.3390/app12178528
Chicago/Turabian StyleAsano, Shinka, and Susumu Ishihara. 2022. "Safe, Smooth, and Fair Rule-Based Cooperative Lane Change Control for Sudden Obstacle Avoidance on a Multi-Lane Road" Applied Sciences 12, no. 17: 8528. https://doi.org/10.3390/app12178528
APA StyleAsano, S., & Ishihara, S. (2022). Safe, Smooth, and Fair Rule-Based Cooperative Lane Change Control for Sudden Obstacle Avoidance on a Multi-Lane Road. Applied Sciences, 12(17), 8528. https://doi.org/10.3390/app12178528