1. Introduction
Networking vehicles via vehicle-to-everything (V2X) communications facilitates connection among vehicles, edge servers, and cloud services. Edge servers for V2X communications play a key role in the coordination of vehicle traveling, communication quality control, and the perception of road conditions [
1,
2]. Furthermore, the trends of autonomous driving brings out more challenging issues in sensing, perception, and cooperation in V2X networks. With the advances in sensing technologies, a vehicle can be equipped with various sensors, such as LiDARs, radars, cameras, and wireless RF sensors. The integration of V2X communications and the distributed sensing at vehicles is important to improve awareness and driving safety, as well as the communication quality for vehicle-to-infrastructure (V2I), vehicle-to-vehicle (V2V), and vehicle-to-network (V2N) communications [
3].
Extending sensing-perception is desired due to the limited capacity of one sensor and one vehicle. The collective perception among vehicles allows vehicles to share sensing information and increase the awareness of other vehicles and obstacles [
4]. In order to enable the efficiency of communication and computing in collective perception, a number of studies have been carried out, including congestion control and redundancy mitigation [
5,
6].
Besides collective perception in V2X, there are also other efforts in extending sensing and perception in information and communication technology (ICT) systems to increase sensing recognition accuracy and spectrum sensing coverage. For instance, the clustering method has been examined in cognitive radio to increase the reliability and accuracy in identifying the existence of primary users [
7,
8]. Furthermore, station-based multi-band sensing has been utilized in a WLAN to improve the spatial-and-spectrum coverage of wireless sensing in a Basic Service Set (BSS) [
9]. On the other hand, the specified cooperation structure, such as cluster and WLAN BSS, is not available and may be not practical for cooperation among vehicles due to the management cost and the lack of information of nearby vehicles, such as their IP addresses.
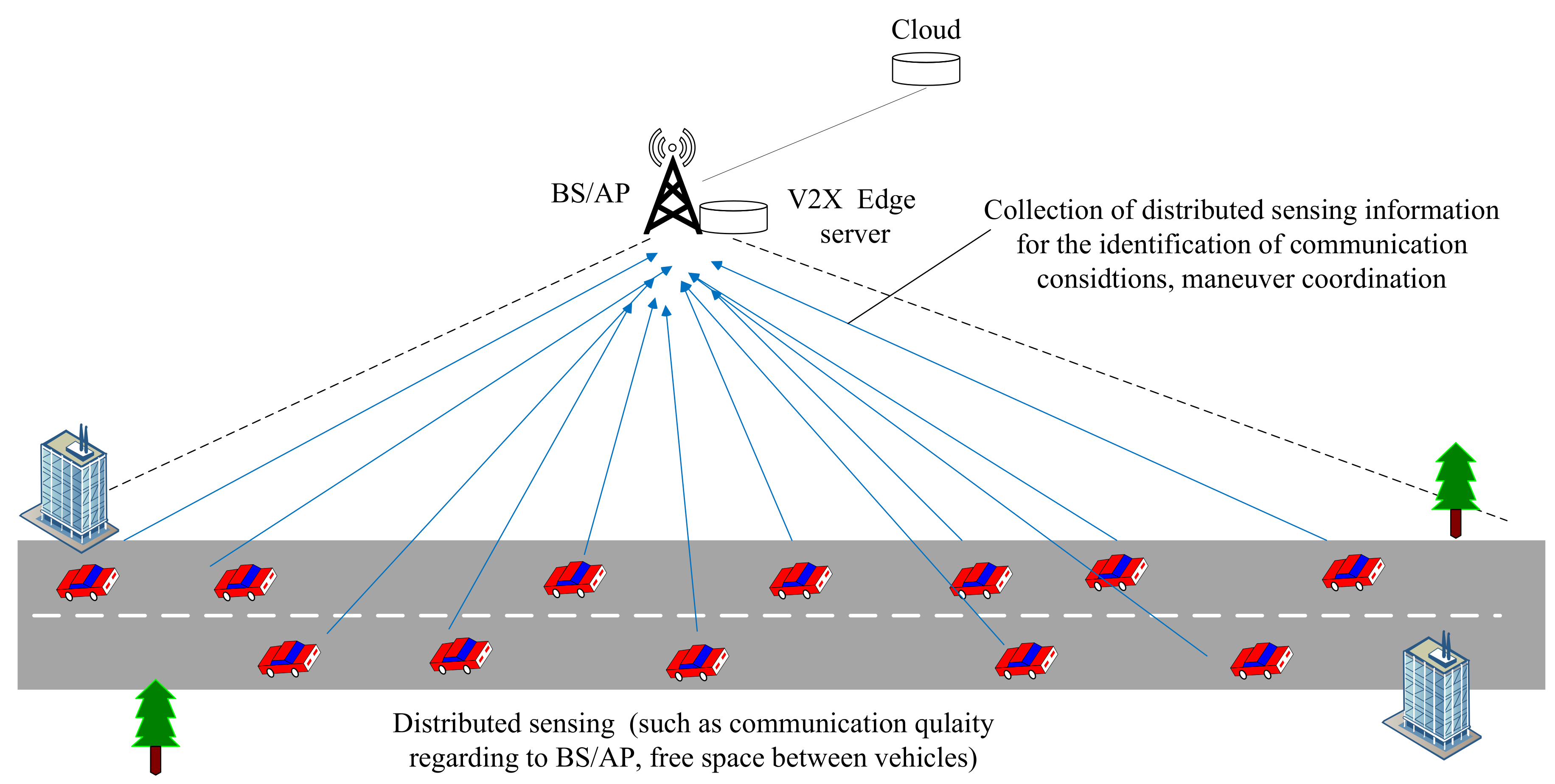
In this paper, we attempt to examine the functionality of extended sensing-perception at V2X edge servers, which are expected to support reliable communications to vehicles and maneuver coordination. The general sensing information at vehicles refers to the numerical sensing results that indicate the communication quality, free space size, or distance between vehicles. For instance, the sensing information to collect and extract from vehicles can be a received signal strength indicator (RSSI) of a vehicle, or the free space size in a certain direction towards a vehicle [
10,
11,
12]. An edge server increases its sensing-perception capacity by collecting and extracting sensing information from vehicles. The object information that needs to be extracted from vehicles to an edge server is the summary or statistical feature of the distributed sensing results of vehicles, such as the minimum or maximum of the sensing values among vehicles. These extracted sensing results is expected to facilitate the broadcast reliability, maneuver cooperation, and improve the awareness of road traffic conditions.
We illustrate the application examples of the extended sensing-perception at a server based on distributed sensing information of communication quality and free space at vehicles. The first example is a reliable broadcast at a base station or access point (BS/AP) of an edge server. A broadcast is an important communication method in V2X and involves a number of unspecified destinations. Each vehicle monitors the communication quality, e.g., of the RSSI or the Reference Signal Received Power (RSRP), when receiving broadcast packets from the BS/AP of the edge server. By retrieving the distributed sensing results from vehicles, such as the minimum RSSI or RSRP, the edge server makes appropriate adjustments for a reliable broadcast. That is, based on the collection and summary of the distributed sensing data of different vehicles, the edge server selects a suitable data rate for the broadcast and makes an appropriate decision regarding broadcast time or channel selection. The second example is an edge server that collects the sensing information of free space between vehicles, which carries out a sensing of free space for other vehicles. Based on the collection and extraction of the sensing information of free space, the edge server assesses and predicts the safety status and performs maneuver coordination by an adjustment of vehicle speed and the distance between vehicles [
11,
13].
However, the functionality of the extended sensing-perception is accompanied by a high consumption of wireless resources and computing resources, especially at the edge server. With the increase in the number of vehicles, there is a scalability problem when the edge server collects sensing data from many vehicles that may put a large traffic load on edge servers.
In order to reduce the consumption of network resources and traffic load at the edge server when extracting sensing information, this paper employs a two-step method for the extraction of sensing information from vehicles at the edge server. The proposed method involves the local sharing and extraction of sensing information among vehicles and the global extraction of sensing information from edge servers. When combining local cooperation among vehicles and the global extraction of sensing information from an edge server, only a few reports need to be sent to the edge server, leading to a significant decrease in network resource consumption and a small traffic load at the edge server. In the proposed method, a set of broadcast-based information exchange among vehicles is carried out to locally share and extract the sensing information. The broadcast-based exchange of sensing data allows for the practical operation of vehicles without the necessity of knowing and specifying the destination of other vehicles before exchanging sensing data with nearby vehicles.
Performance evaluation of the proposed method is carried out by computer simulation and mathematical analysis. The evaluation results show that the proposed method highly reduces the number of reports from vehicles at the edge server in the extraction of sensing information from vehicles. Furthermore, the results show that the total amount of wireless resource consumption is highly reduced for the local sharing of sensing information among vehicles and the extraction of sensing information from the edge server. We find that only a few rounds of local exchange of sensing results with each vehicle are needed to improve the scalability of the reports sent to the edge servers. The general property of scalability of the proposed method is examined by mathematical analysis.
The contributions of the paper are as follows.
(1) From a functionality perspective, this paper examines the extraction of sensing information from vehicles at the edge server to extend sensing-perception. To enable the effective extraction of sensing-information from vehicles with a low traffic load at the edge server, we transform the extraction procedure into a two-level process that involves (a) the local sharing and extraction of sensing information among vehicles and (b) the global extraction of sensing information at edge servers.
(II) From the perspective of communication efficiency, hybrid communication is utilized in the proposed method for the extraction of sensing information from vehicles. First, long-range wireless communication is utilized for communication between the edge server and vehicles in queries and reports of sensing information. Second, short-range wireless communication is utilized for the local exchange of sensing information among vehicles in order to reduce the consumption of wireless resources.
(III) From the perspective of practical applications, a broadcast is employed at the vehicles for the sharing of sensing information between them. To increase the scope of the local sharing of sensing data among vehicles, the multiple-round exchange of sensing data is investigated. Meanwhile, the proposed method employs the constraint of maximum scope for the sharing of sensing data among vehicles and avoids the duplicated transmission of the same sensing data at each vehicle.
(IV) We investigate and verify the efficiency of multi-round sharing and the extraction of sensing information among vehicles for the edge server to efficiently collect and extract the object sensing information. Furthermore, the general property of scalability of the proposed method is examined and verified via mathematical analysis.
The remainder of this paper is organized as follows.
Section 2 introduces the related work.
Section 3 introduces the system model and motivation of the paper.
Section 4 describes the proposed scheme.
Section 5 describes the evaluation and numerical results of the proposed scheme.
Section 6 introduces the discussion and future work, and
Section 7 concludes the article.
2. Related Work
Collective perception in V2X increases the awareness of other vehicles and obstacles by allowing vehicles to share the sensing information with other vehicles [
3]. Cooperative awareness is enabled by dissemination of the vehicle state, such as the current position and speed. The typical messages in collective perception involves the a cooperative awareness message (CAM) or a basic safety message (BSM). The transmission frequency of these messages affects the traffic load generated in the collective perception. In [
5], the authors examined the congestion control in collective perception. In [
14], the authors examined the efficiency of CAM and BSM dissemination among vehicles based on different mechanisms of collective perception. Redundancy migration in collective perception was investigated in [
6].
In [
3], the authors examined the performance of collective perception with different metrics, including environmental perception, the effect on communication channels, and safety metrics. To asses the impact on the safety improvement by utilizing collective perception, new metrics were introduced to measure the environmental risk awareness of the traffic participants. Cooperative driving with free space awareness was examined in [
15] using interdisciplinary approaches. Platooning or cooperative automated driving is an intelligent transport system that forms groups of vehicles together on roads. Vehicles in a group follow each other at a close distance in an autonomous manner and with a common shared leader.
Extending the sensing accuracy and capacity by the collection of sensing results from different users in wireless networks has been discussed. With an aim to improve sensing reliability and accuracy in a cognitive ratio, clustering sensing entities has been studied for the reliable collection of sensing results at different positions, so as to correctly detect the primary users [
7,
8]. In [
9], the authors proposed a cooperative sensing method for a multi-band wireless LAN (WLAN). To overcome the constraint of channel sensing at the AP of a WLAN, a number of STAs were utilized to perform channel sensing, leading to an increase in spatial coverage and spectrum coverage in channel sensing.
A broadcast is an important communication method in message dissemination in vehicle networks. Four types of broadcast are categorized in [
16] in terms of reliability, priority, and the scope of broadcast. In [
17], the authors introduced a framework of safety message dissemination in V2X communications. V2I and V2V resource allocation methods for safety messages were proposed. The objective was to reduce the delay and increase the reliability of safety message dissemination. A priority difference was assigned to various applications, and a high priority was assigned to safety message dissemination and a low priority was assigned to applications such as video downloads. In [
18], the authors provided a review of emergency message dissemination in vehicle networks and introduced the studies that have aimed to reduce communication delay and improve the packet delivery ratio. In [
19], the authors studied the reliable and efficient dissemination of traffic events among vehicles. The proposed method involved relay control, duplicate dissemination control, and vehicle clustering control to increase the event dissemination rate and reduce the event duplication rate.
Conventional studies have shown that the utilization of multiple communication interfaces is one approach to reducing the consumption of wireless resources and increasing communication reliability. In [
10], the authors proposed a method of sharing map information among robots that have a low speed of movement. A large communication range was utilized for communications to the map server, while short-range communication was utilized for the sharing of map information in a robot cluster. The cluster leader downloaded the map information, which was disseminated to other robots in its cluster to reduce wireless resource consumption. Clustering robots is feasible considering the slow movement of robots. Multi-connectivity management for V2X was proposed in [
20]. To increase the reliability of message delivery, multi-path delivery was considered. The combined utilization of dedicated short-range communications (DSRC) and cellular V2X was examined in [
21] for the fast and reliable dissemination of traffic information. The proposed method allowed each vehicle to transmit its message through two communication modules for both speed and reliability.
However, few studies have explicitly examined the functionality of sensing-information extraction from vehicles for extended sensing-perception at the edge server, along with sensing information sharing among vehicles. Furthermore, few studies have explicitly addressed the cooperation mechanism among vehicles for the efficient extraction of sensing information in the V2X network, which suffers from the information constraints of nearby vehicles and lacks the cooperation structure among vehicles.
3. System Functionality and Motivation
3.1. System Model
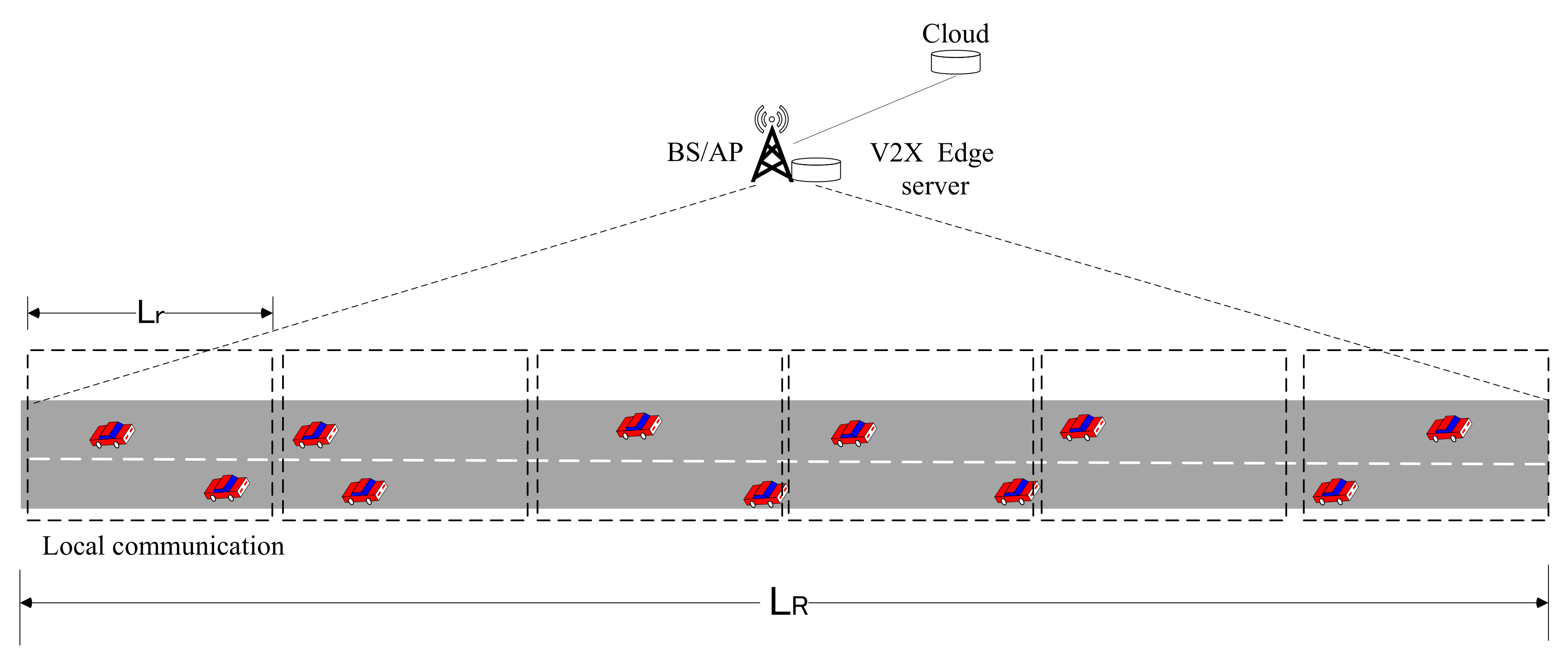
The system considered in this paper consists of a set of vehicles and a BS/AP at the edge server. Each vehicle employs two kinds of wireless-communication interfaces. One is a communication interface for connection with the BS/AP. The other wireless interface is for connection with nearby vehicles. The edge servers can be a mobile edge server, such as that utilized for LTE-based wireless communication, or an RSU-based edge server.
In the system that we studied, the communication between BS/AP and the vehicles had a longer communication range than that of the communication between the vehicles. We refer to the wireless links between the vehicle and edge servers as global links and refer to the wireless links between vehicles as local links. For example, the global link can be a 5G- or LTE-based wireless link with a long communication range [
22]. Meanwhile, there are several optional methods for the wireless communication between vehicles, including PC5, DSRC, and Wi-Fi (ad hoc mode). This paper considers short-range and low-cost communication, such as DSRC or Wi-Fi (ad hoc mode), for the local exchange of sensing information among vehicles.
The V2X network system is represented as a graph , where V is the vertex set of object vehicles, the BS/AP at the edge server. The object vehicles in V are considered to be a group of vehicles in a region that is in the service scope of an edge server. Let denote the edge set of those between one vehicle and another. Let refer to the edges between vehicles and the BS/AP. In the system graph , E is the edge set that consists of . Let the graph be a subgraph of G, where consists of the set of vehicles, and represents the local links between vehicles. Due to the relative short communication range between vehicles, may have multiple components.
3.2. System Functionality
The functionality at an edge server involves the query, collection, and extraction of distributed sensing information at vehicles for extending the capacity of sensing and perception. We call the system the extended sensing-perception information system. By overcoming the sensing and recognition constraints of an edge server and individual vehicles, the extended sensing-perception information system facilitates the identification and perception of conditions, and the status of a V2X network to enable, for example, the appropriate broadcast configuration, dynamic channel selection, and maneuver coordination.
An application example of the extended sensing-perception information system is to establish an appropriate data rate or transmission time in a broadcast according to the collection of RSSI information at various vehicles. Broadcasting is an important activity in V2X. However, a broadcast lacks reliability, since there is no specified individual destination, and packet delivery can fail. Since the broadcast destination is a number of vehicles, it is important to know the RSSI features of the object vehicles. One coordination method at the BS/AP is to select an appropriate data rate or a suitable broadcast time according to the minimum RSSI (MinRSSI) among the sensing results of vehicles. This method allows the BS/AP to take account of the worst case for a reliable broadcast transmission.
3.3. Problem and Motivation
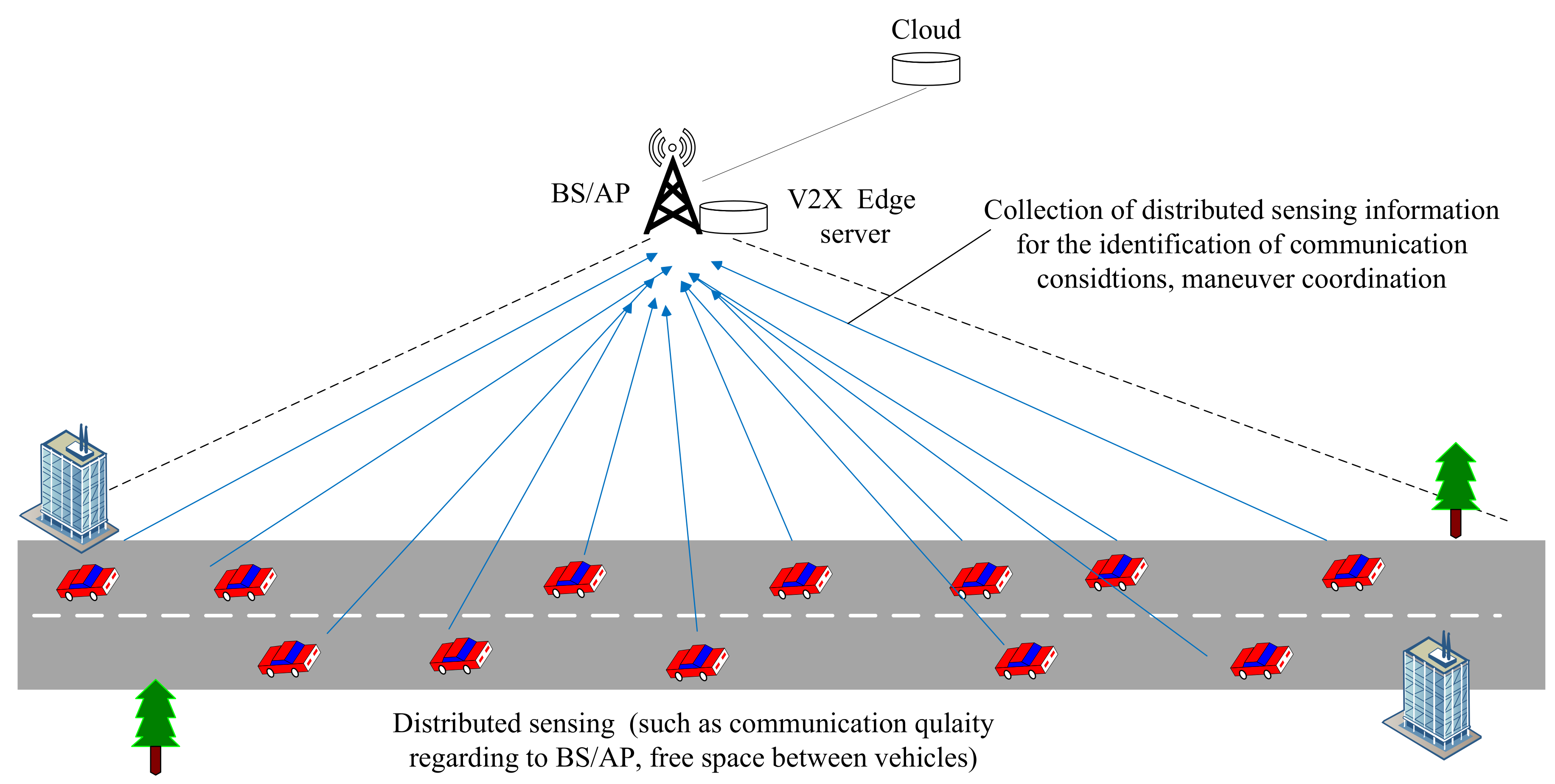
The collection and extraction of distributed sensing information from vehicles must confront the problem of network resource consumption. The collection of sensing data from individual vehicles that is sent to the BS/AP incurs a high amount of traffic load, especially when the number of vehicles is large, as illustrated in
Figure 1. This causes the scalability problem of extended sensing-perception functionality.
In this paper, we address the problem of how sensing information can be extracted in an efficient manner to, at the edge server, avoid high traffic and alleviate the resource consumption caused by data collection and extraction. Furthermore, we attempt to examine the functionality of combining the local sharing of sensing information among vehicles and the global extraction of sensing information from the edge server in order to extend the sensing-perception capability of both vehicles and edge servers.
Our target is to enable an extended sensing-perception function ability with a low consumption of wireless resources and a low traffic load at the edge server in data collection and extraction. We aim to design a set of local cooperation among vehicles to enable the local extraction of sensing information and reduce the global reports of sensing data. In order to improve the system scalability and reduce the traffic load of sensing-perception at the edge server, the desired method is to extract the object sensing information, for example, a min RSSI, with only a few reports from the vehicle to the BS/AP. To enable such a target, a set of cooperation steps are desired to locally extract the object sensing information, before the vehicle starts to report to the edge server.
4. Two-Level Sharing and Extraction of Sensing Information with Local Cooperation among Vehicles
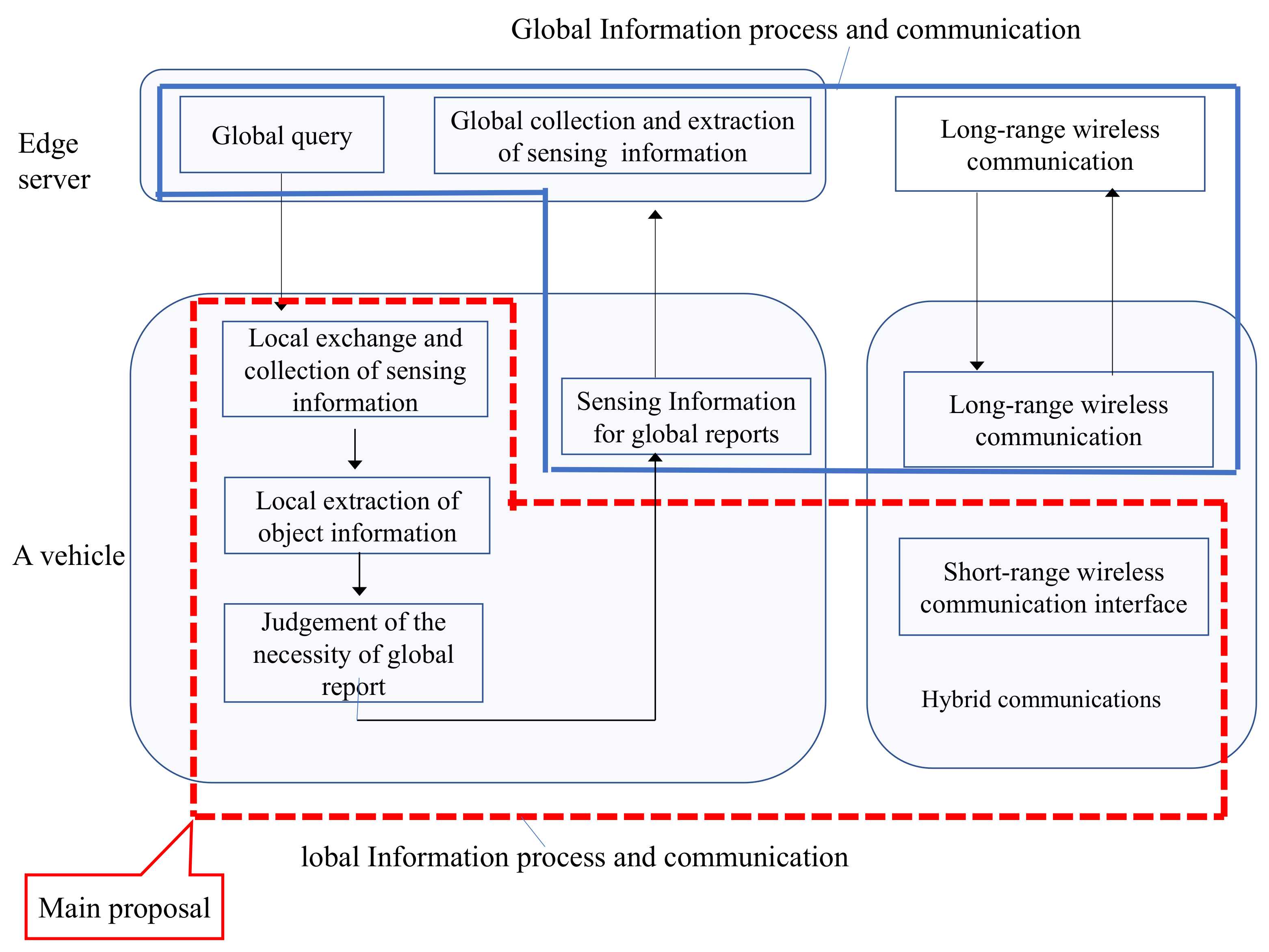
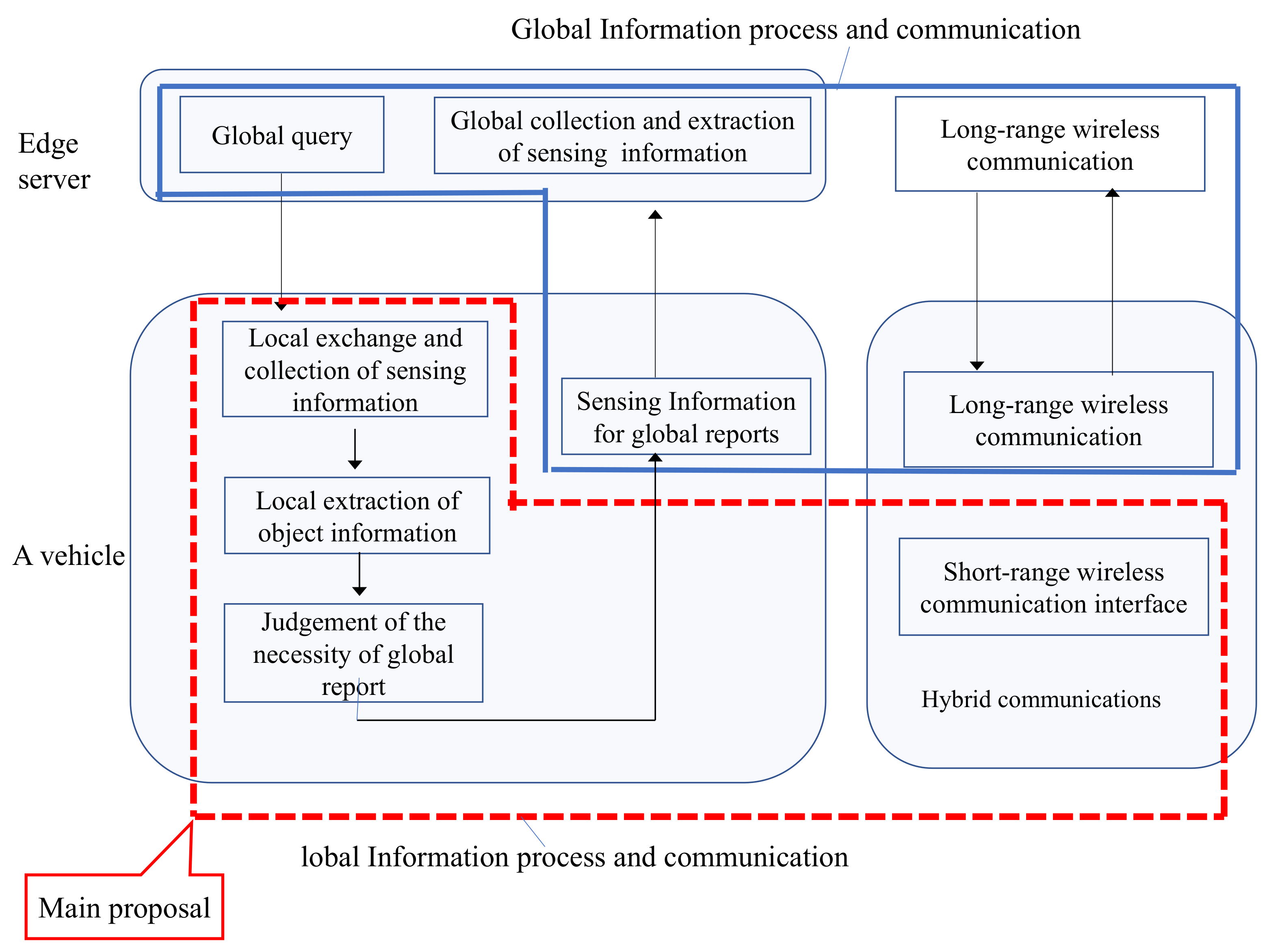
The overview of the proposed method is illustrated in
Figure 2. The proposed procedure of the extraction of object information is a two-level process. The first-level process is called the global collection-extraction process. In this process, the edge server queries and collects sensing information from vehicles to extract the object sensing information, such as the minimum sensing value among vehicles. The second-level process is the local sharing and extraction of sensing information. In this process, vehicles locally share, collect, and extract the object sensing information. After the local extraction of object sensing information, such as the minimum value of the sensing data among vehicles, each vehicle makes a judgement of whether to transmit a report message to the edge server. Only the vehicles that are self-judged to be necessary to report sends its report to the edge server.
Moreover, hybrid communication is utilized in the extraction of the sensing information from vehicles. First, long-range communication is utilized for the global collection and extraction of sensing information between the edge server and vehicles. This communication activity involves a broadcast from the edge server and a unicast for reports from vehicles to the edge server. Second, short-range wireless communication is utilized for the local sharing of sensing information among vehicles via a local broadcast.
We specify the minimum value of the sensing data among vehicles as the object sensing information of the extraction. Such a minimum value is called MinFactor in this paper. We refer to the reports from vehicles to the edge server as the global reports at vehicles. The edge server starts to extract sensing information at vehicles by sending a query message to the vehicles within a limited region. After that, the edge server waits for the reports from vehicles. On receiving the query message from the edge server, the vehicles begin the local sharing and extraction of sensing information.
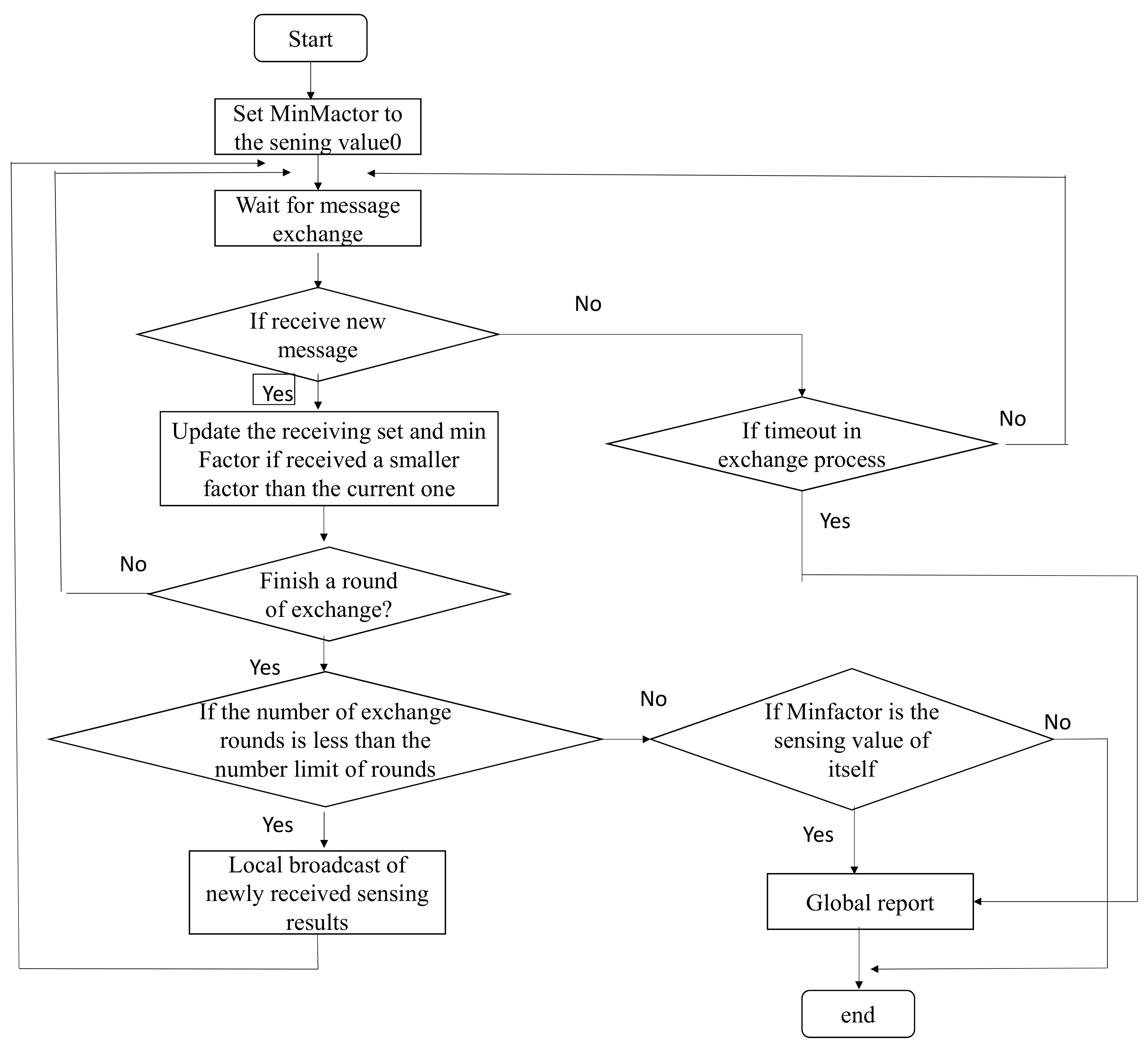
The flowchart of the proposed scheme is shown in
Figure 3. A vehicle at first sets its local record of the MinFactor with a sensing value on its own, denoted by a sensing value of 0. A vehicle starts to exchange the sensing data via the local broadcast. The edge server defines the length of the period for an exchange round. Each vehicle counts the number of rounds during the sensing information exchange. Repetition of the local broadcast of the sensing data allows for the spreading of sensing information among vehicles that are not directly connected in the local communication range.
After the first round of exchange, each vehicle collects its received sensing results and then broadcasts the new received information if the number of exchange rounds is less than the threshold. Let the set of received message at a vehicle be denoted by , where i is the vehicle ID, k is the round number, and n is the number of messages received. The information to exchange at an exchange round k at a vehicle is hence denoted by , which is the set difference of and . If the number of exchange rounds reaches the threshold, the vehicle stops the exchange procedure of sensing data. Each vehicle then locally extracts the object sensing information. For instance, given a set of collected sensing results of RSSIs obtained from other vehicles, a vehicle searches the minimum RSSI and judges whether its own RSSI value is the minimum RSSI compared with other RSSI values obtained from the exchanges. A vehicle refrains from reporting its sensing result to the edge server if its sensing result is not the MinFactor, such as the minimum RSSI or the minimum free space between vehicles.
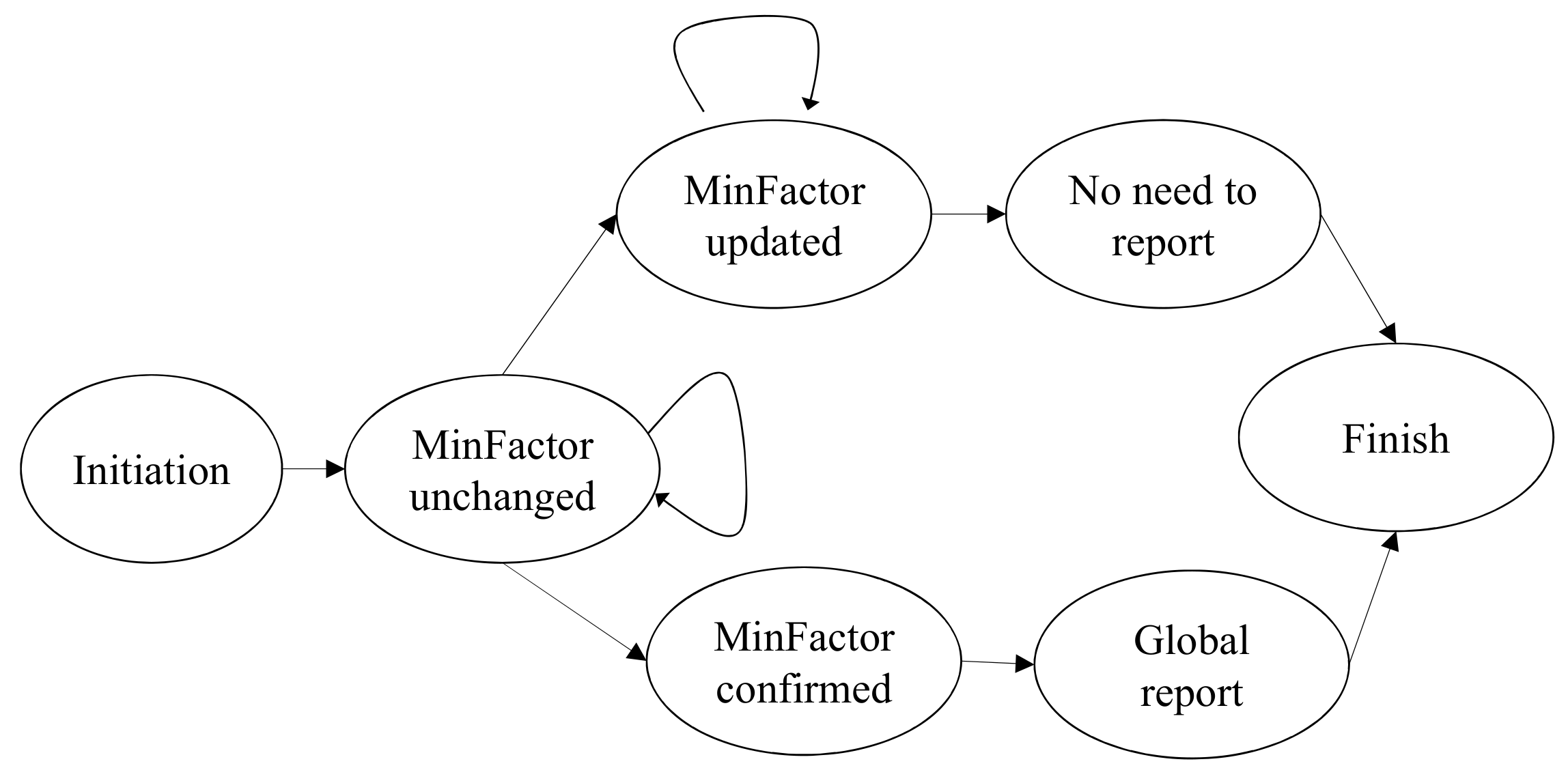
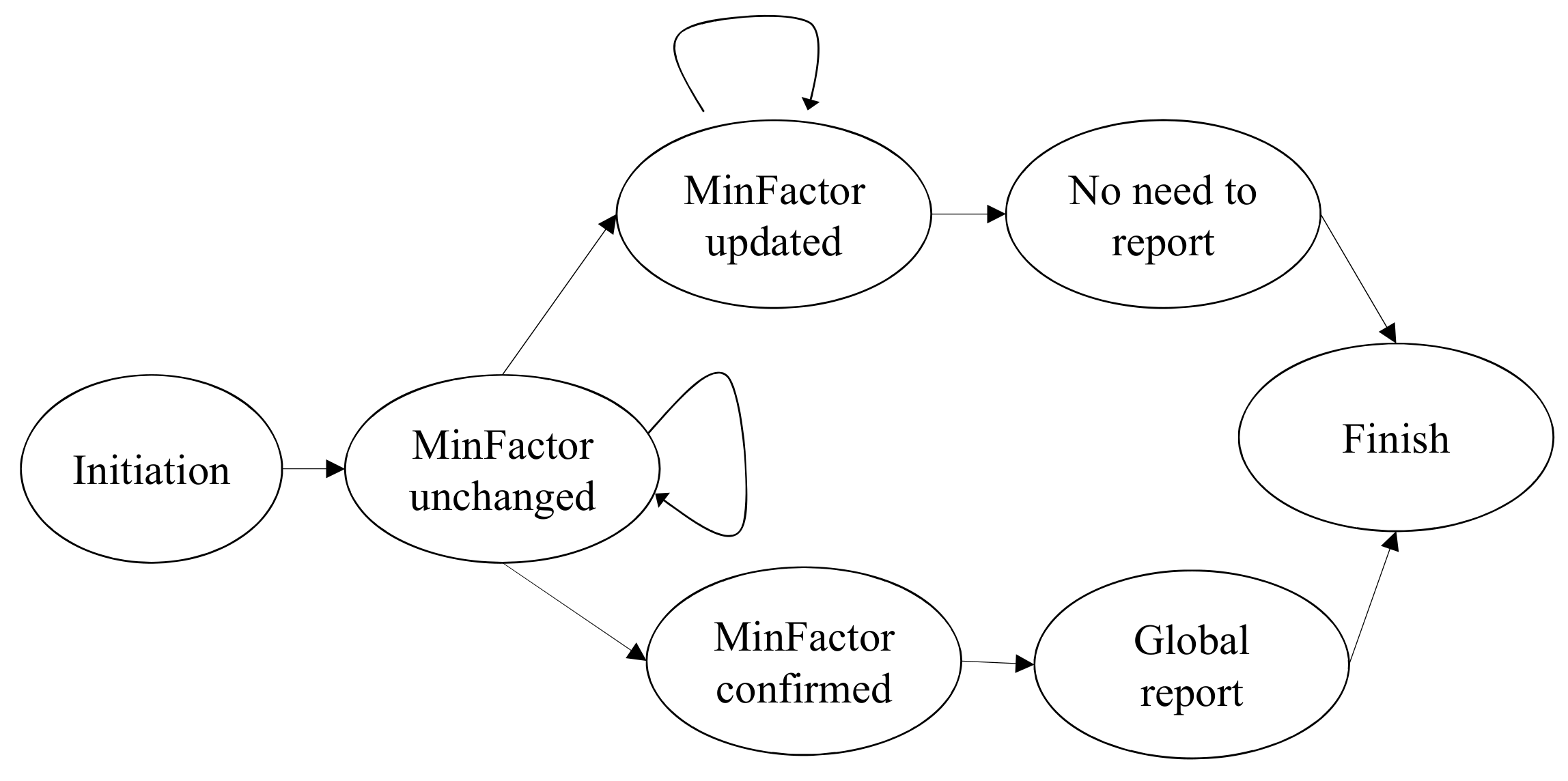
The state machine at a vehicle is illustrated in
Figure 4. The set of states includes the Initiation state, the MinFactor unchanged state, the MinFactor updated state, and the Global report state. The condition of transition from the MinFactor unchanged state to the MinFactor updated state is that the MinFactor at a vehicle is updated due to the reception of a new message in the exchange of sensing information. The vehicle has a state of a global report when it confirms that it has a sensing value less than all received sensing values after all rounds of sensing-data exchange.
When the edge server has collected the report(s) of sensing information from vehicles, the edge server carries out a new extraction procedure of sensing information if there are multiple reports from the vehicles. The edge server searches for the MinFactor from the reported sensing values as the final result of extraction. The final extraction result at the edge server, such as the minimum RSSI among vehicles, will be utilized in the network management, e.g., for reliable communications and the coordination of the maneuver of vehicles.
5. Performance Evaluation
5.1. Simulation Setup
We carried out a computer simulation to assess the performance of the proposed scheme by a C++ program on a Linux system (Ubuntu 18.04). The objective of the simulation is to examine the efficiency of sensing-information extraction regarding the traffic load at the edge server and the effectiveness of local cooperation among vehicles.
In the evaluation, the main evaluation metrics are as follows.
(1) The number of global reports
We measured the main traffic load in sensing information extraction at the edge server by the number of global reports of sensing data from the vehicles to the edge servers. We measured the necessary number of global reports after each round of local exchanges of sensing information among vehicles.
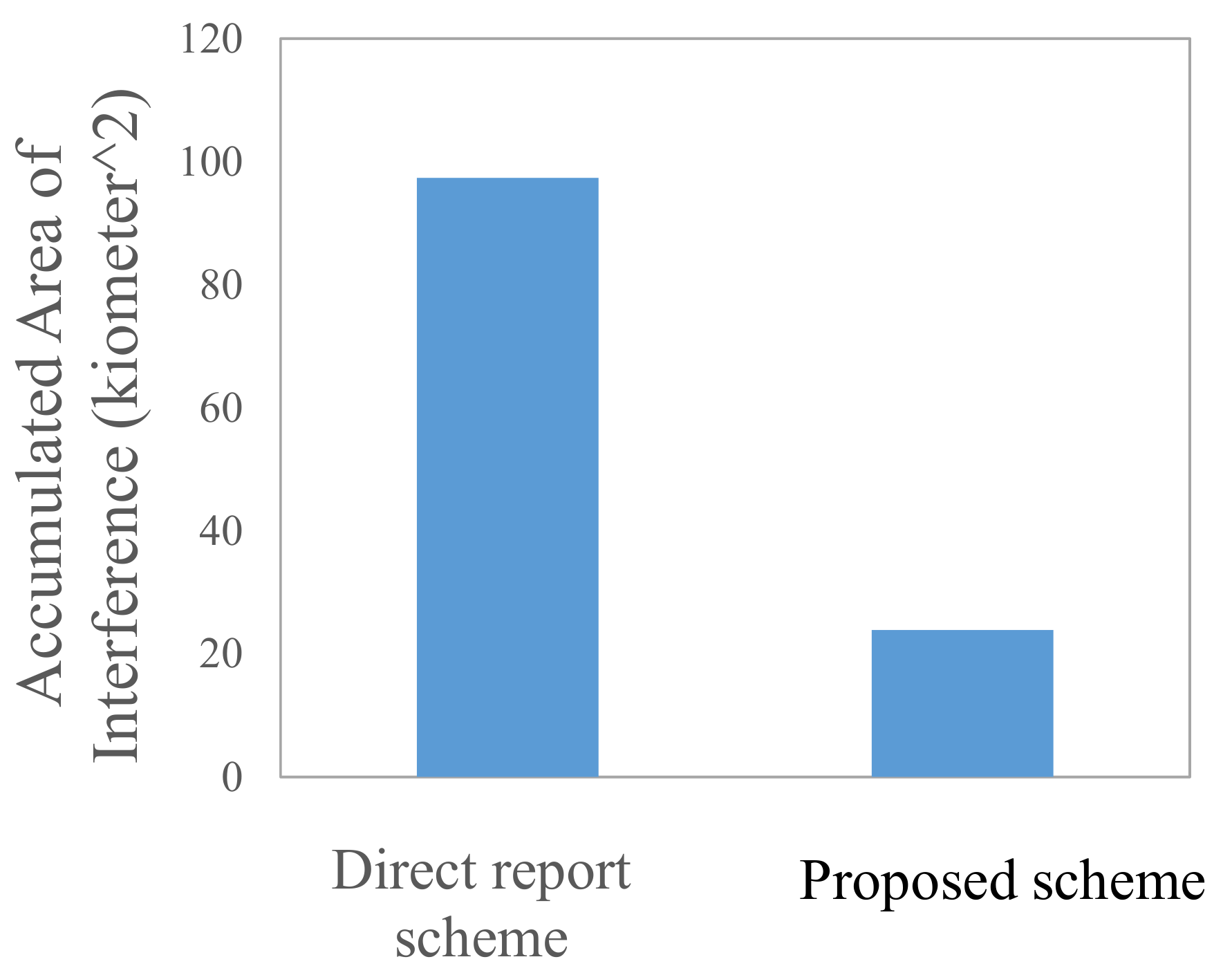
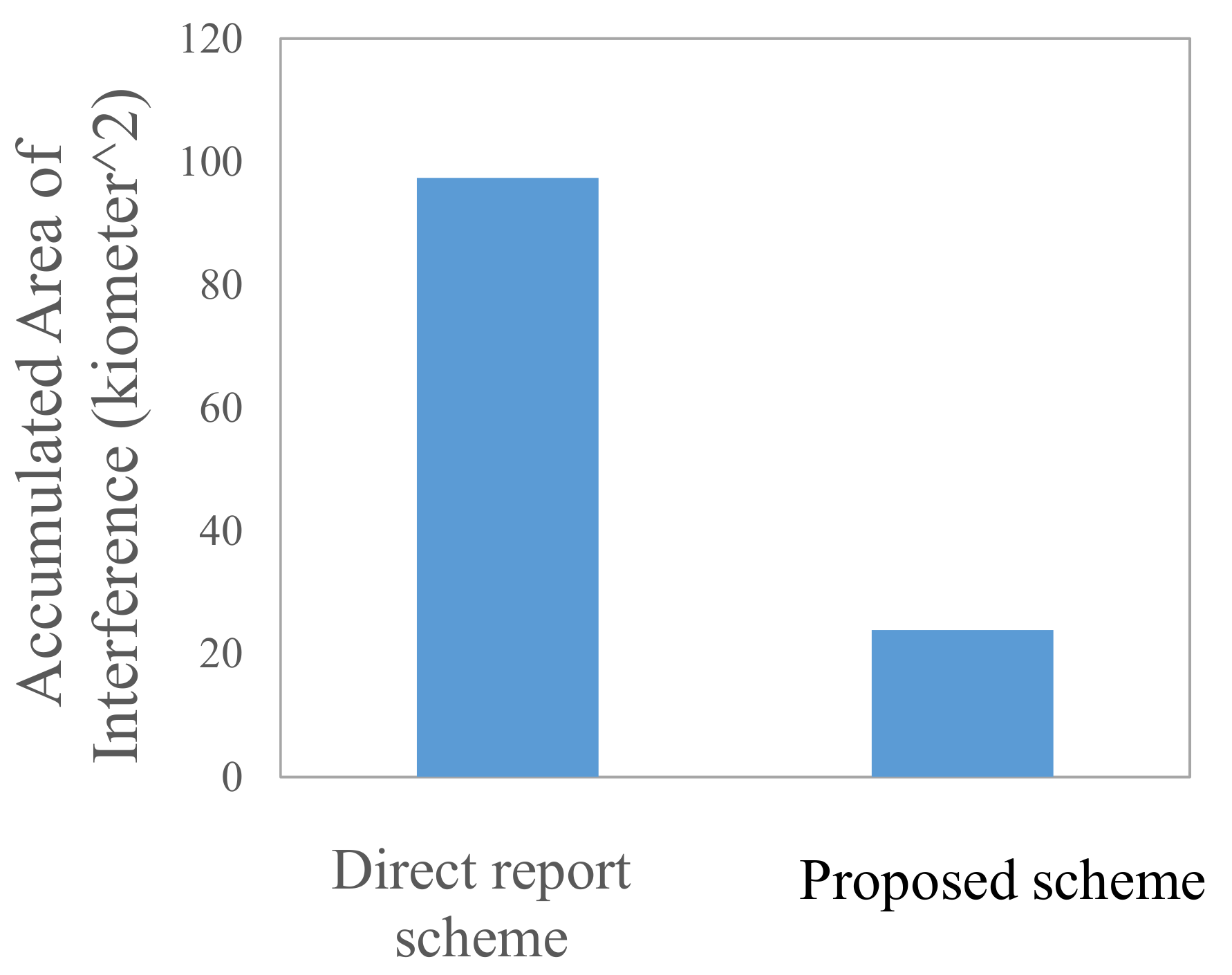
(2) The consumption of wireless resources in terms of accumulated interference area
Interference area is a key factor that is associated with the consumption of spectrum resources, the power of transmission, and the potential contention status in using the wireless resources.
Let the local transmission range for the data exchange between vehicles be
r. Let the global transmission range between a vehicles and the edge server be
R. Suppose that there are in total
n local broadcasts at vehicles, and
N global reports from vehicles to the edge server. We measure the accumulated interference area by
(3) The MinFactor extracted at each round of exchange
This metric shows the results of local extraction of object information that needs to be extracted.
Two schemes are evaluated: (1) a direct report scheme, i.e., the fundamental scheme of sensing information extraction in which each vehicle reports its sensing results to the edge server, and (2) the proposed scheme of sensing information extraction.
The parameter setup in the simulation is shown in
Table 1. One edge server and 30 vehicles were employed in the evaluation. The communication range between a vehicle and the edge server was set to 1000 m. Two local communication ranges, 300 m and 100 m, were employed. Such local communication ranges were regarded as two typical examples, referring to the communication ranges of DSRC and Wi-Fi. The local communication range affects the connectivity of vehicles and scope of the local exchanges of sensing information. The vehicles were randomly distributed in two lanes. The object sensing results at the vehicles were random integer values in between −50 and −100. The object information in the extraction of sensing information is the MinFactor, which is the minimum value of sensing results among the vehicles. The maximum number of exchange rounds was set to 3. In the evaluation, to concentrate on the mechanism of the sharing and extraction of sensing information, we supposed that there was reliable communication between vehicles and between the edge server and the vehicles.
Four scenarios were employed in the evaluation. In Scenario 1, one case of network topology is employed, the communication range between vehicles is set to 100 m, and vehicle positions are randomly generated. Scenario 2 involves 10 cases of network topology that are randomly generated. The communication range between vehicles is set to 100 m. In Scenario 3, one case of network topology is employed, the communication range between vehicles is set to 300 m, and vehicle positions are randomly generated. Scenario 4 involves 10 cases of network topology that are randomly generated, and the communication range between vehicles is set to 300 m.
5.2. Evaluation Results
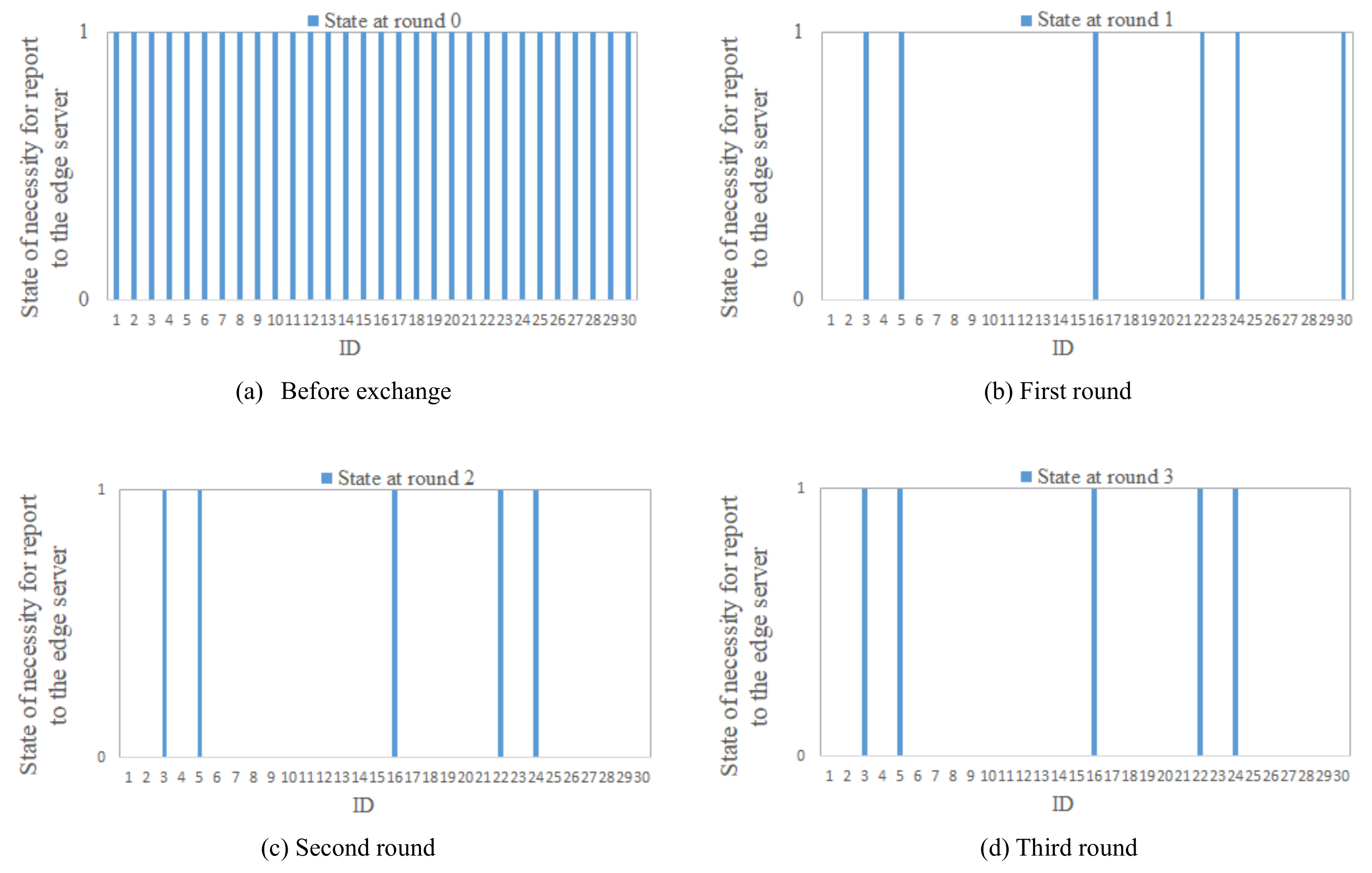
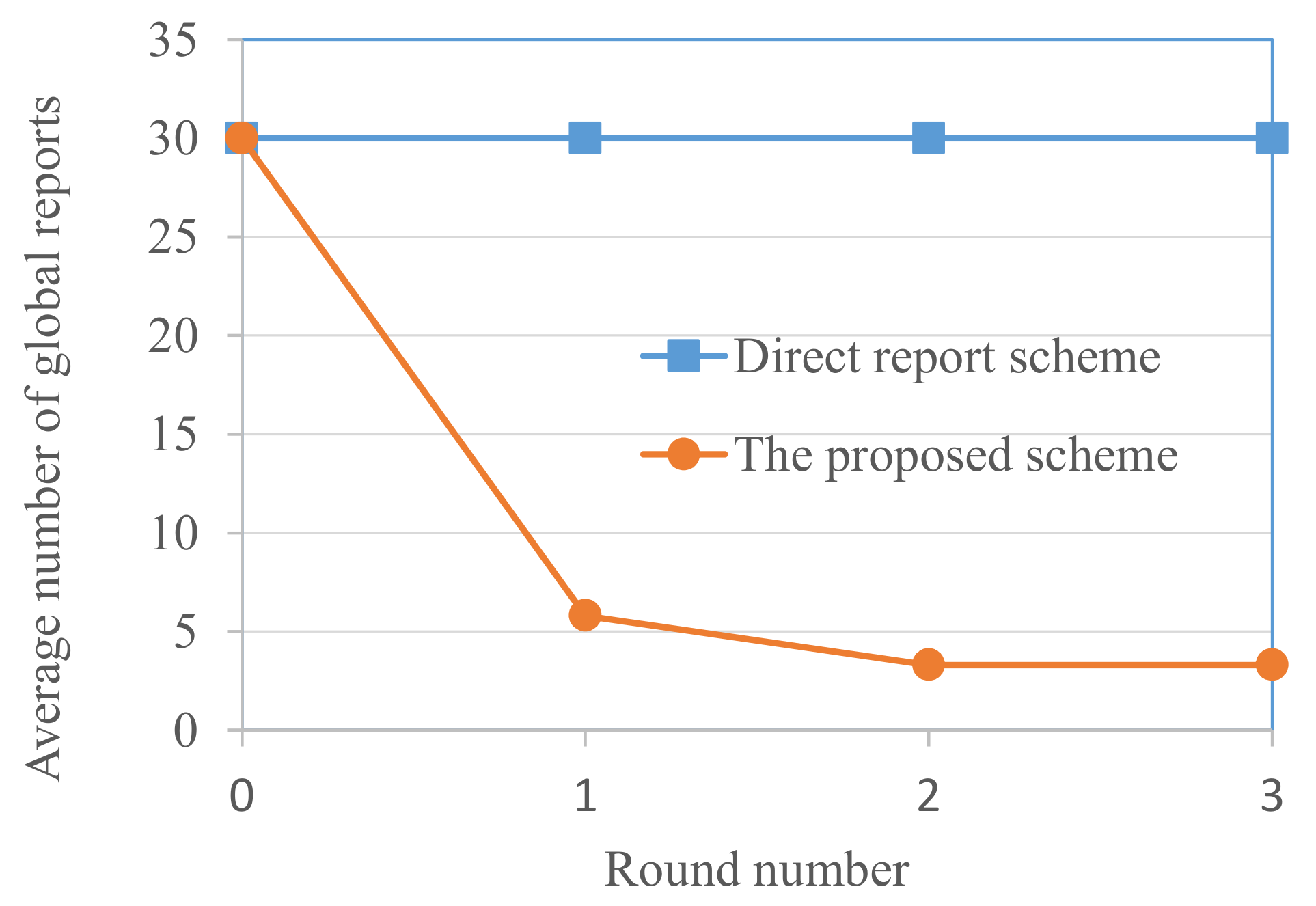
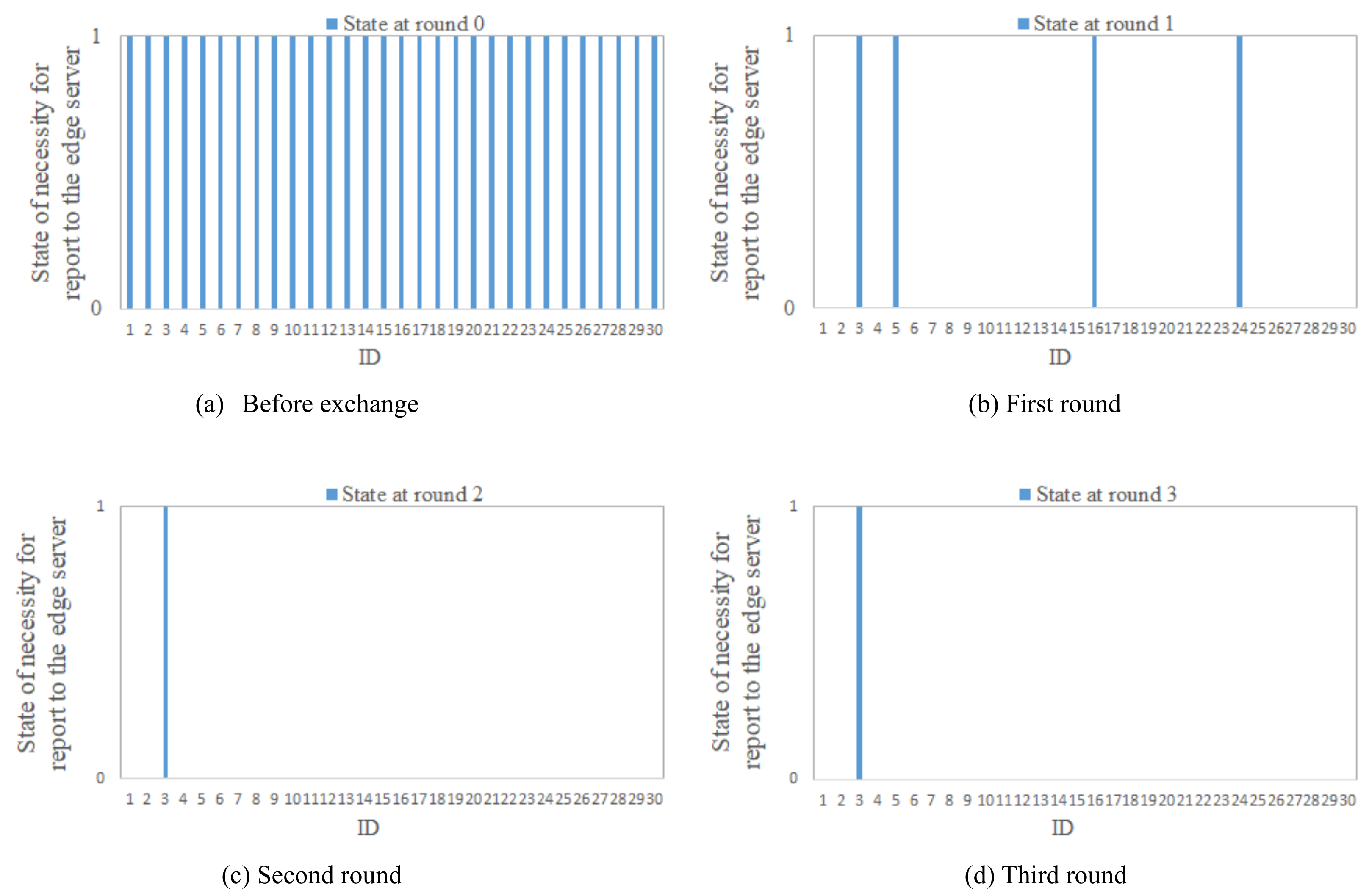
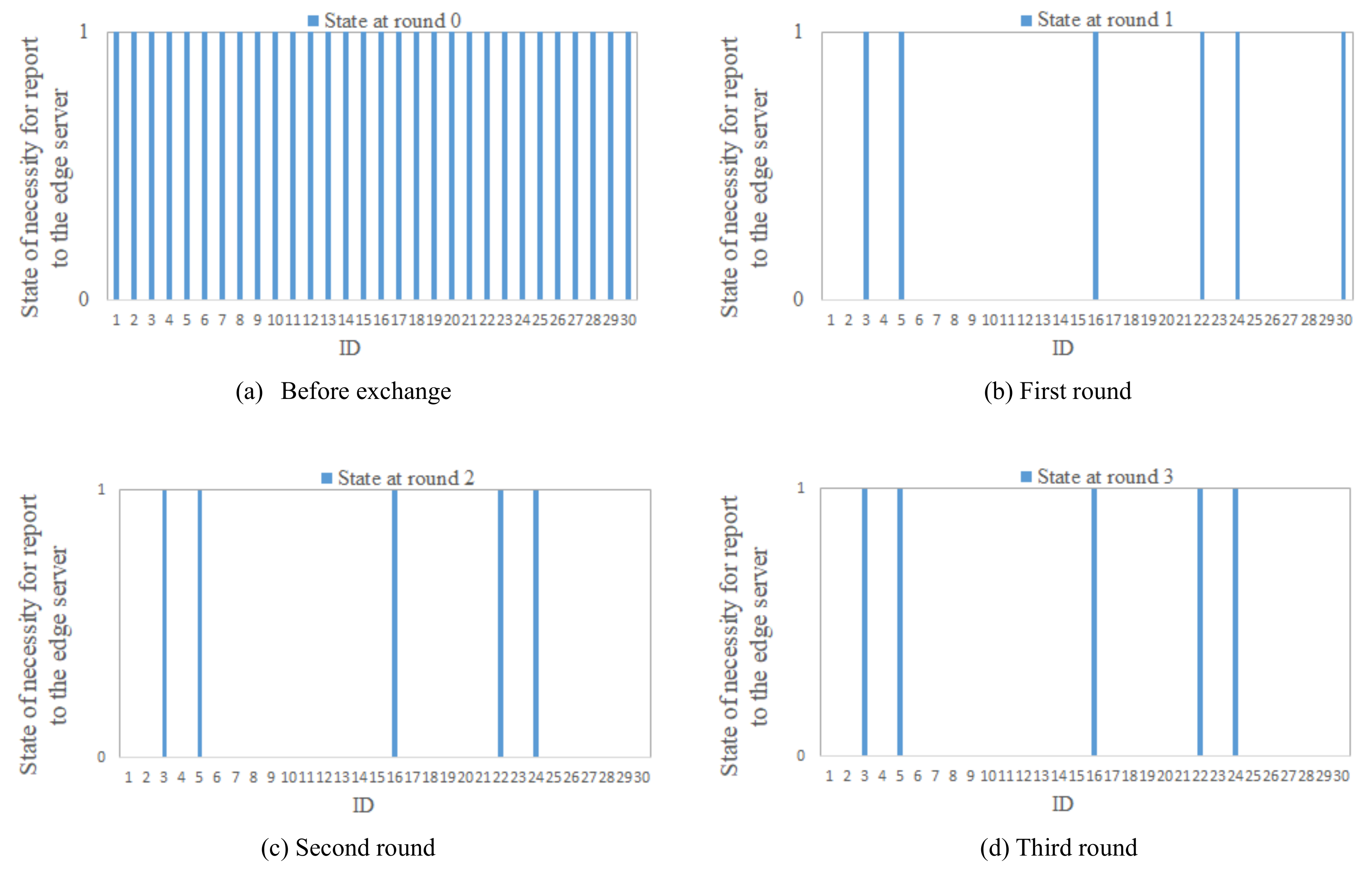
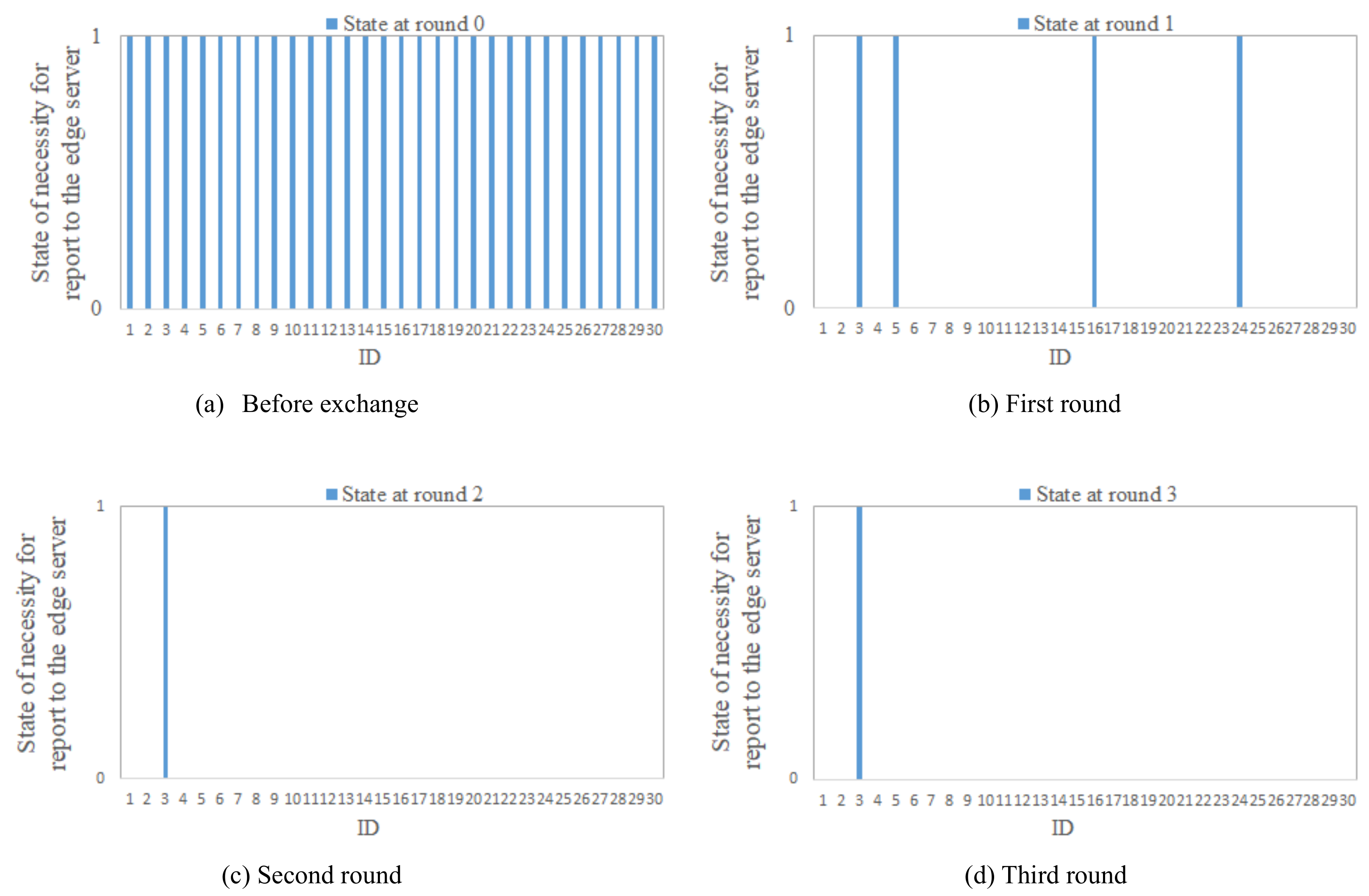
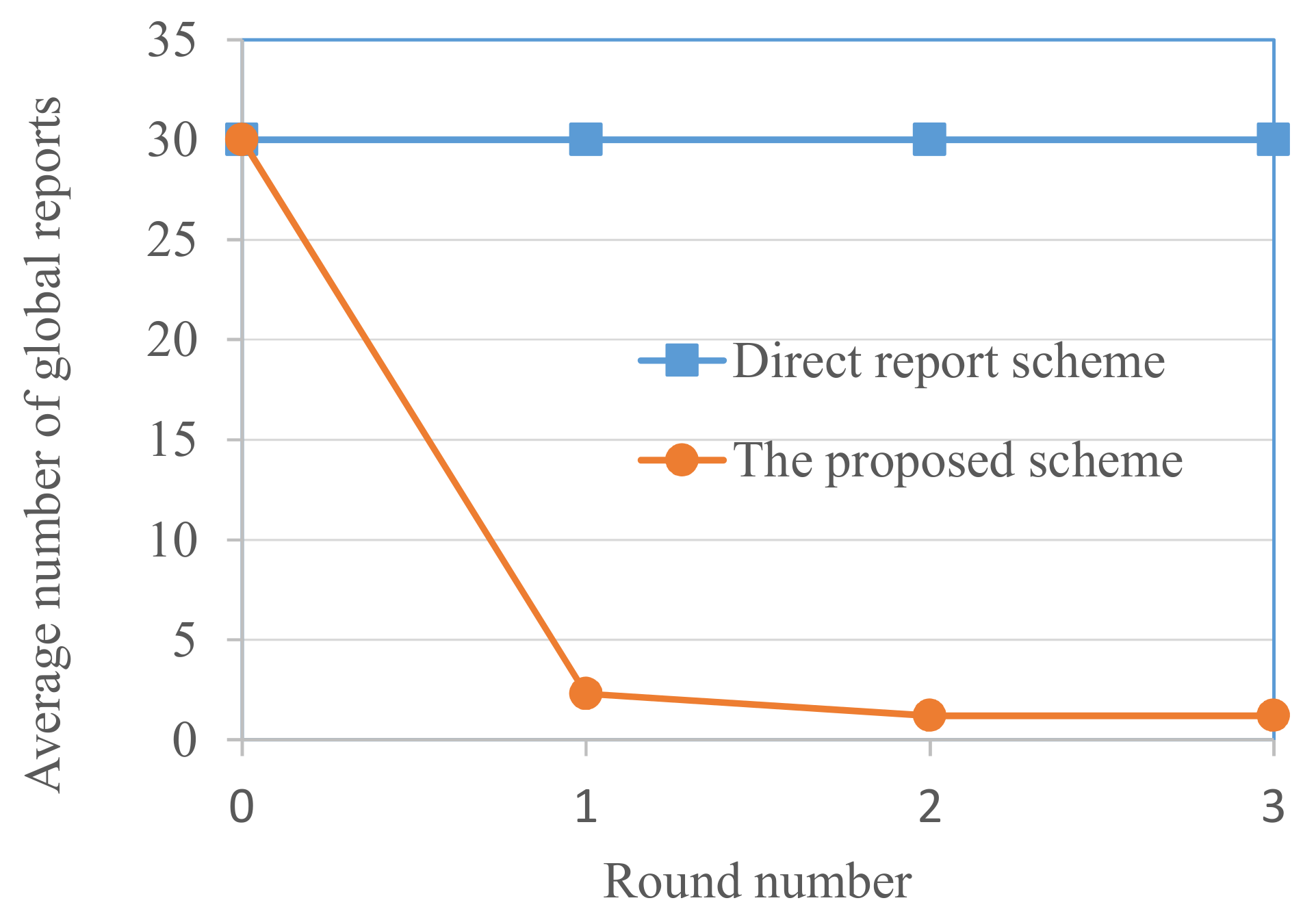
Figure 5 shows the necessary number of vehicles that need a global report of results to the edge server in Scenario 1 regarding the proposed scheme. The number of global reports before the local exchange of sensing information is 30. After the first round of local exchange, there are 6 vehicles that need to report its sensing results to the edge server. After the second round of local exchange, there are 5 vehicles that need to report to the server, and this number of necessary reports does not change after the third round of exchange.
We believe that the decrease in global report number is caused by the local extraction of object sensing information and the prohibition of unnecessary reports at each vehicle. We further believe that the information exchange already brings about this effect after the second round of exchange, leading to little change in the number of necessary global reports after the second round of exchange.
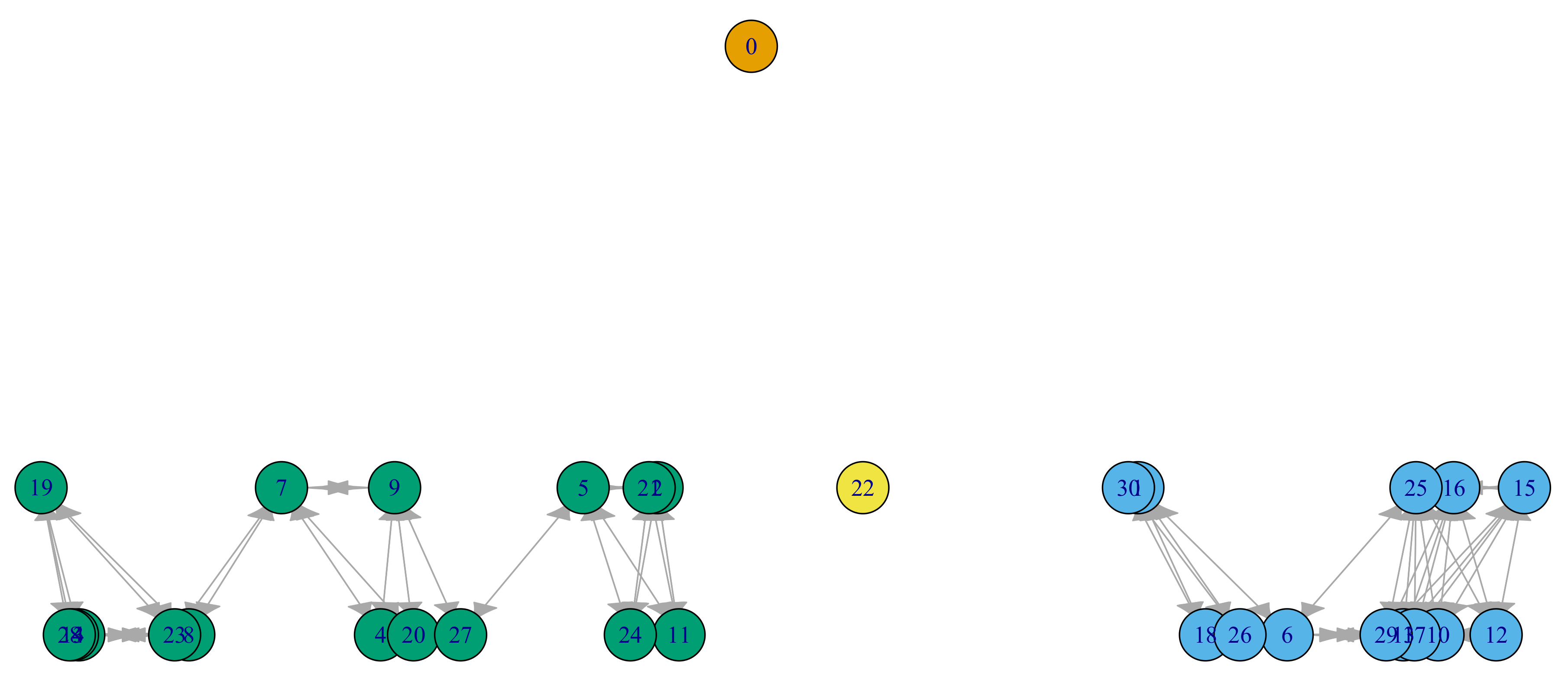
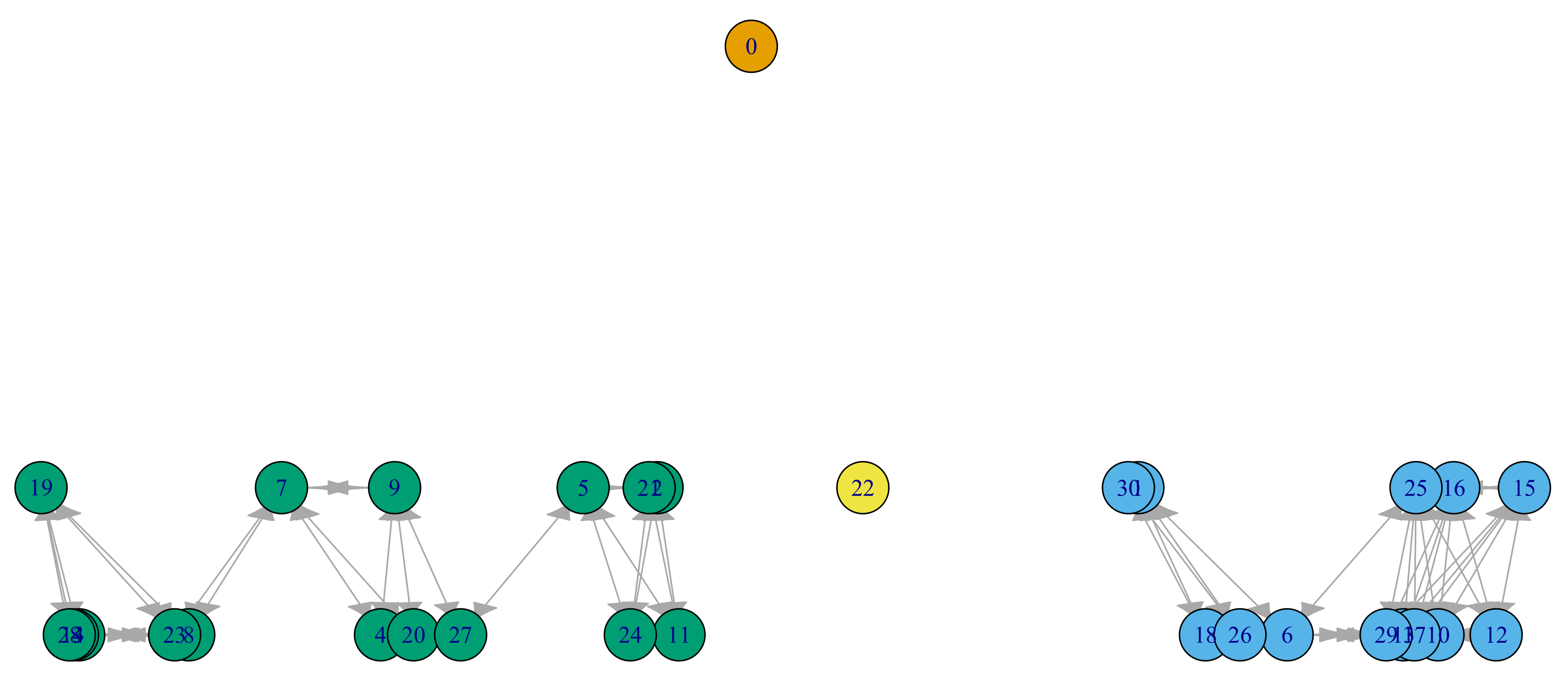
Moreover, the disconnectivity of the V2V network is considered to cause multiple reports form the vehicles to the edge server. It is impossible to exchange sensing information between vehicles in different V2V graph components. To confirm the connectivity among vehicles, we examined the graph features of the vehicles.
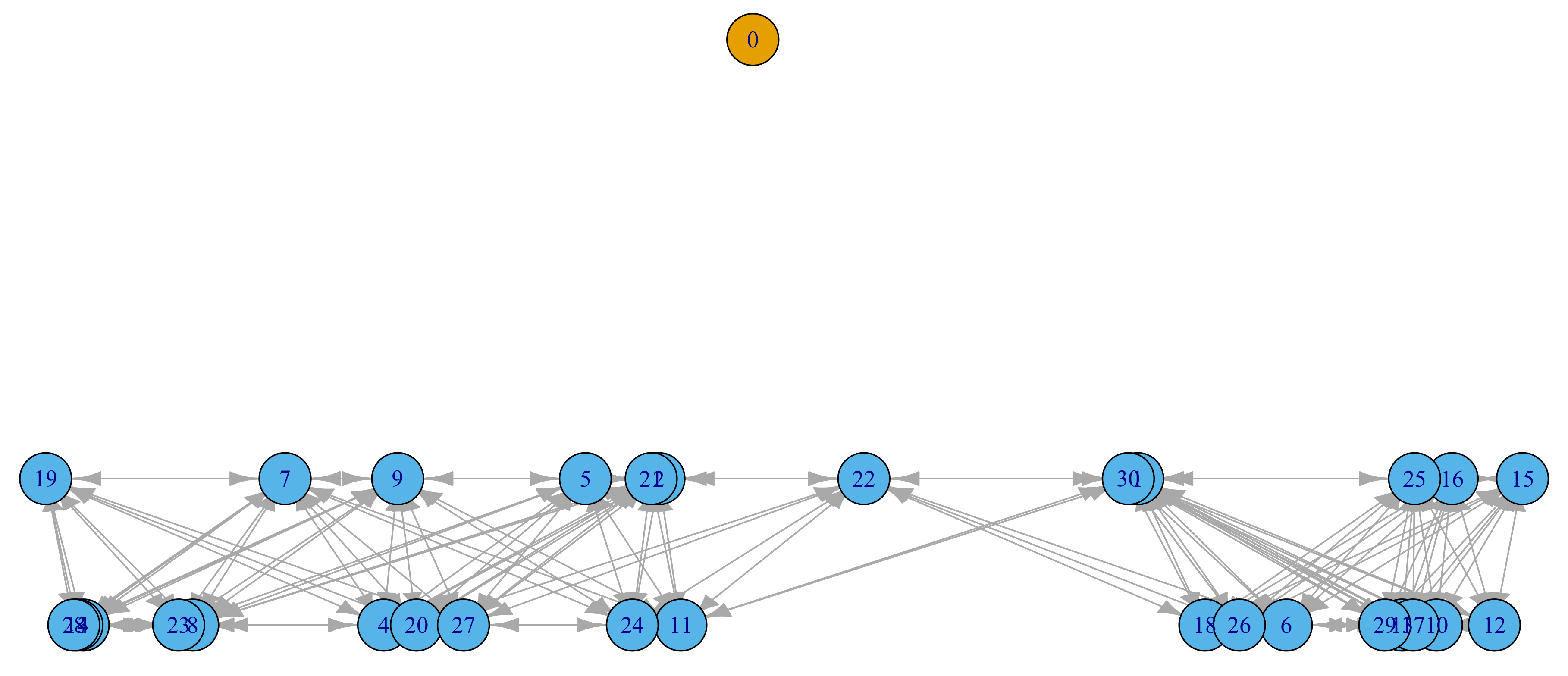
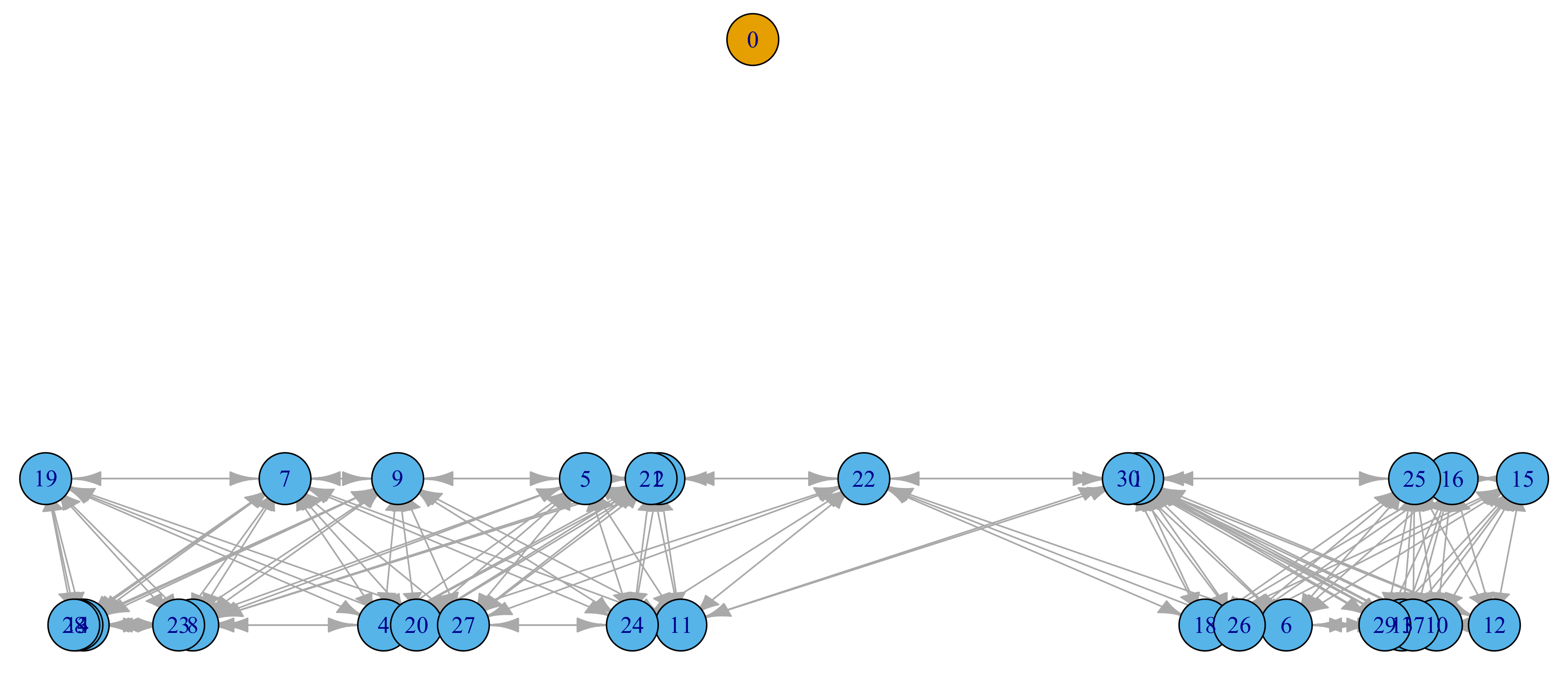
Figure 6 shows the graph topology of the corresponding vehicles examined in Scenario 1. There are three components in the graph of vehicles that utilize a local communication range between them. Since each graph component requires at least one report after the local extraction of sensing information, the total number of global reports will be no less than 3 and cannot be further decreased by the increase in exchange rounds.
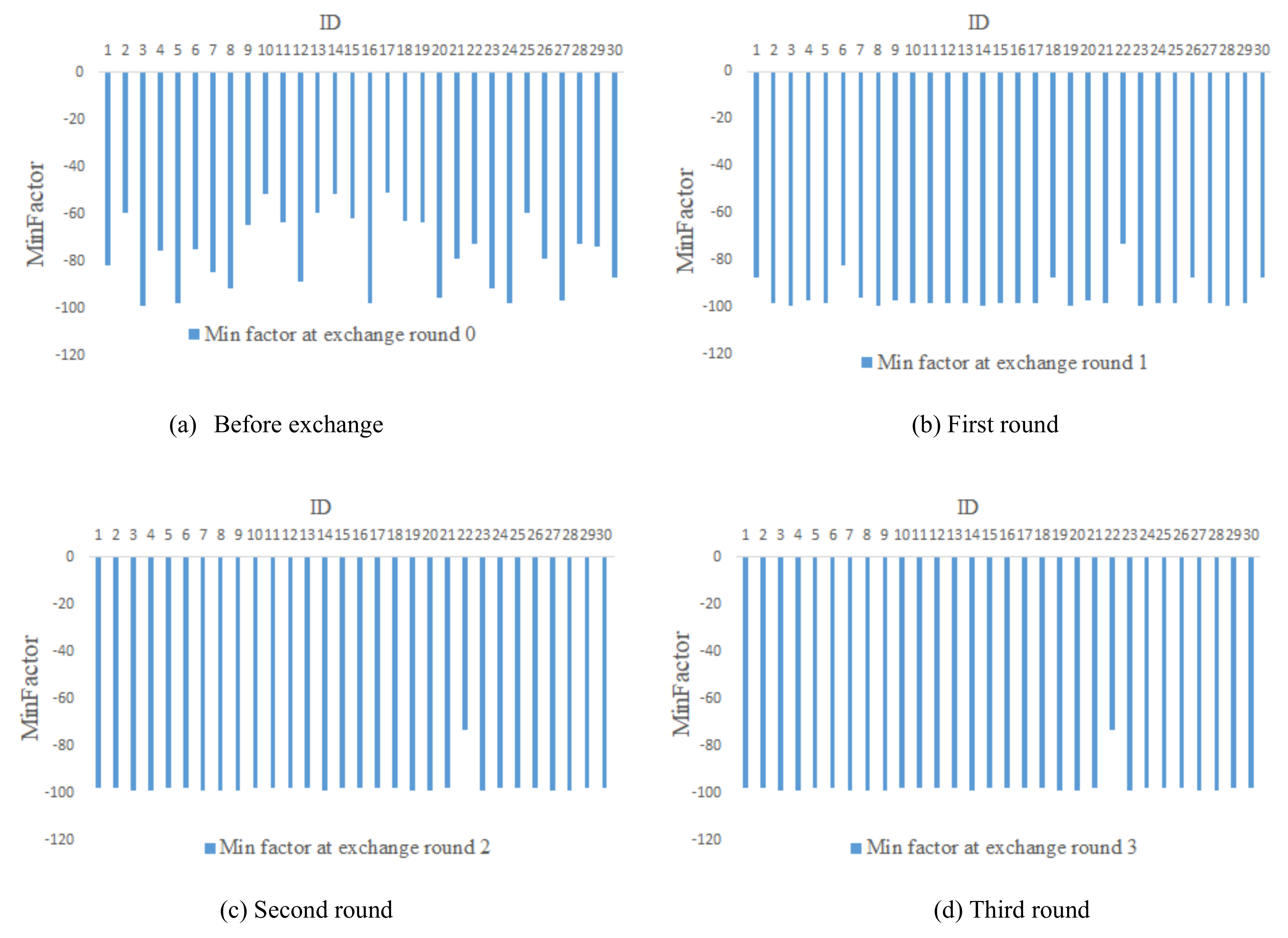
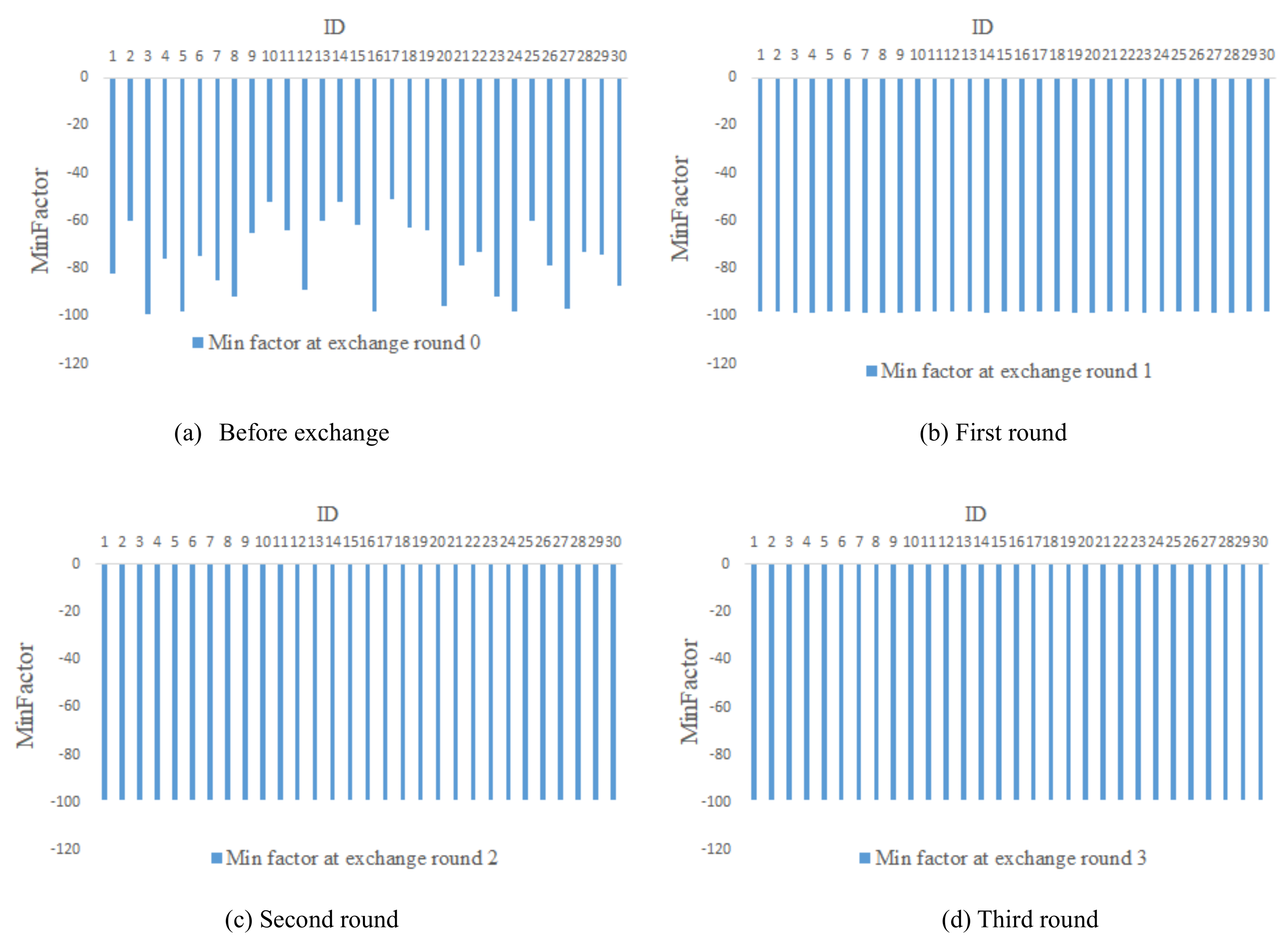
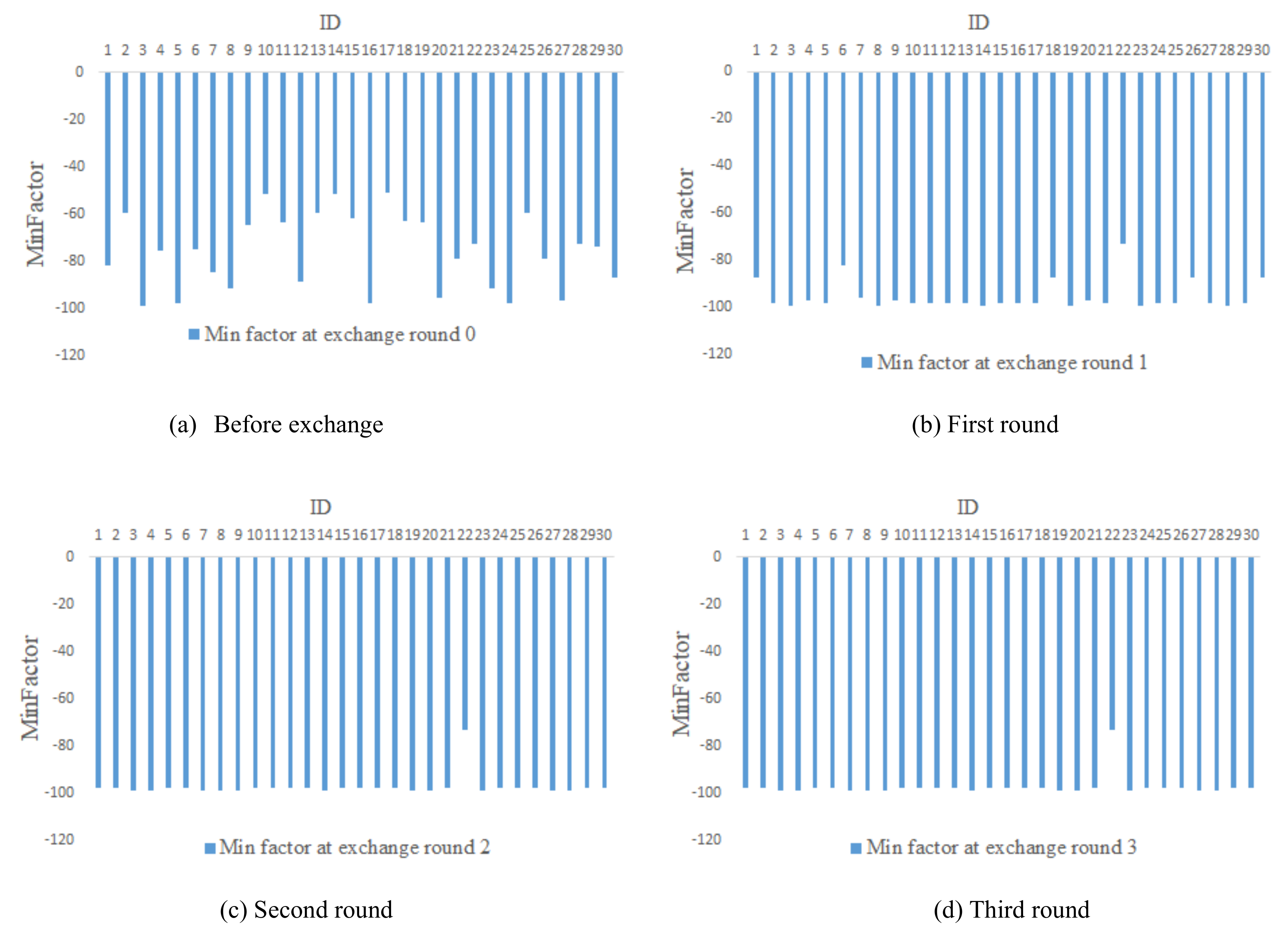
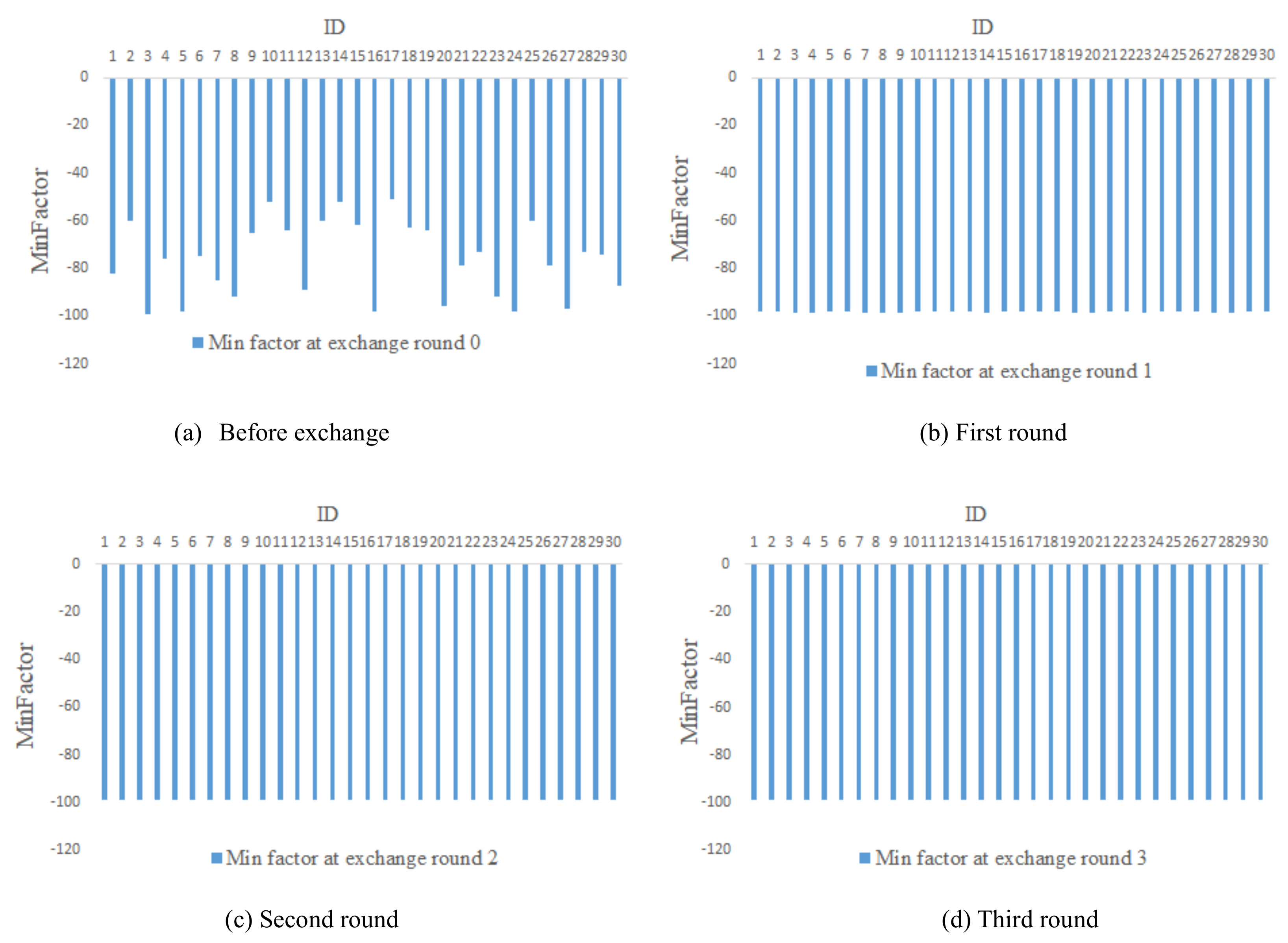
Figure 7 shows the result of MinFactor, which was extracted at each vehicle during the exchange of sensing results among vehicles in Scenario 1 regarding the proposed scheme. Although the MinFactor at the vehicles were initially diverse before the exchange of sensing results, there was a significant decrease in the diversity of MinFactor values among vehicles after the first round of exchange. There were less than 10 different MinFactors. After the second round of exchange of sensing results, there were less than five different MinFactors among vehicles. As the number of rounds increased, the diversity of MinFactor information came to a stable number, without further decreases in the third round of exchange.
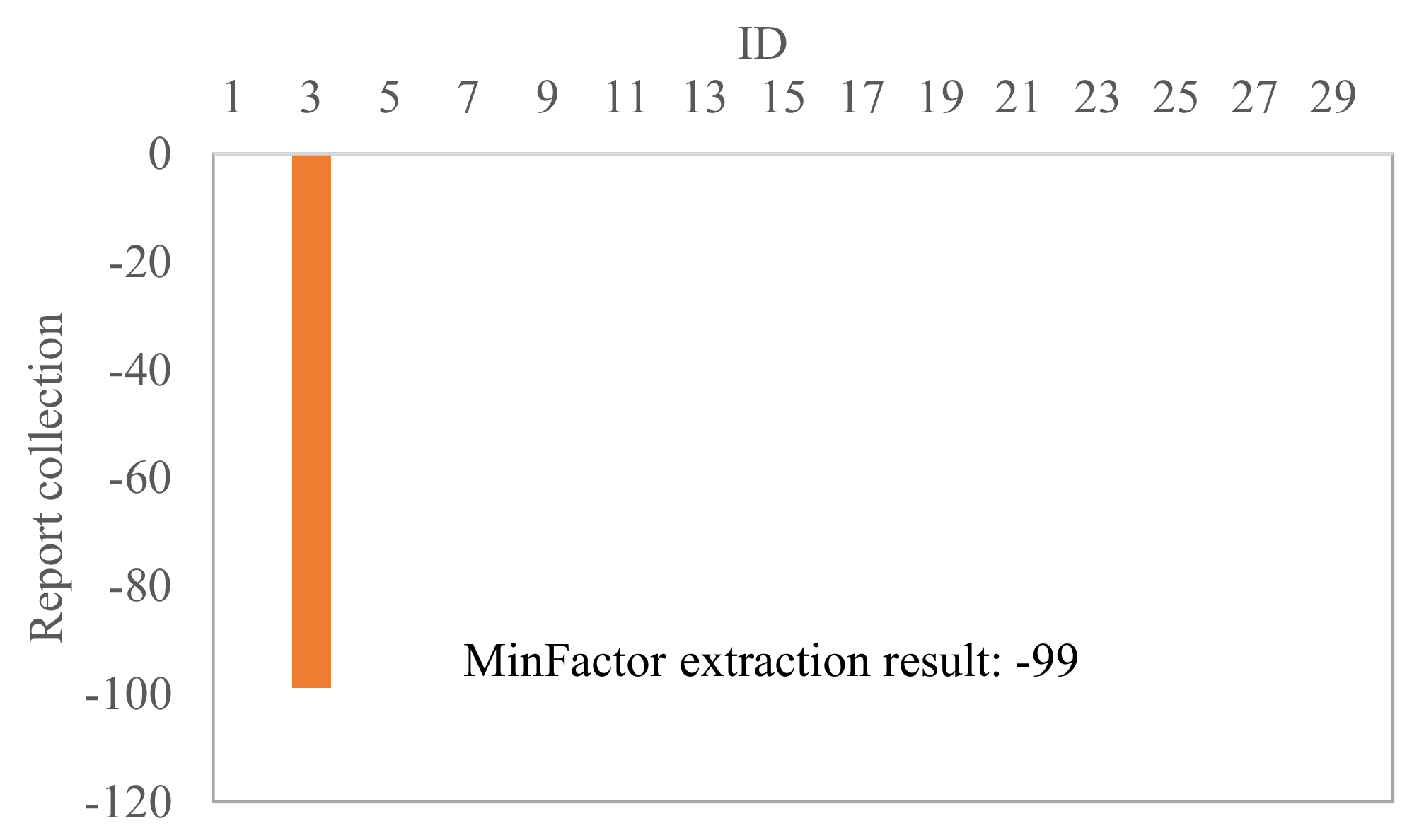
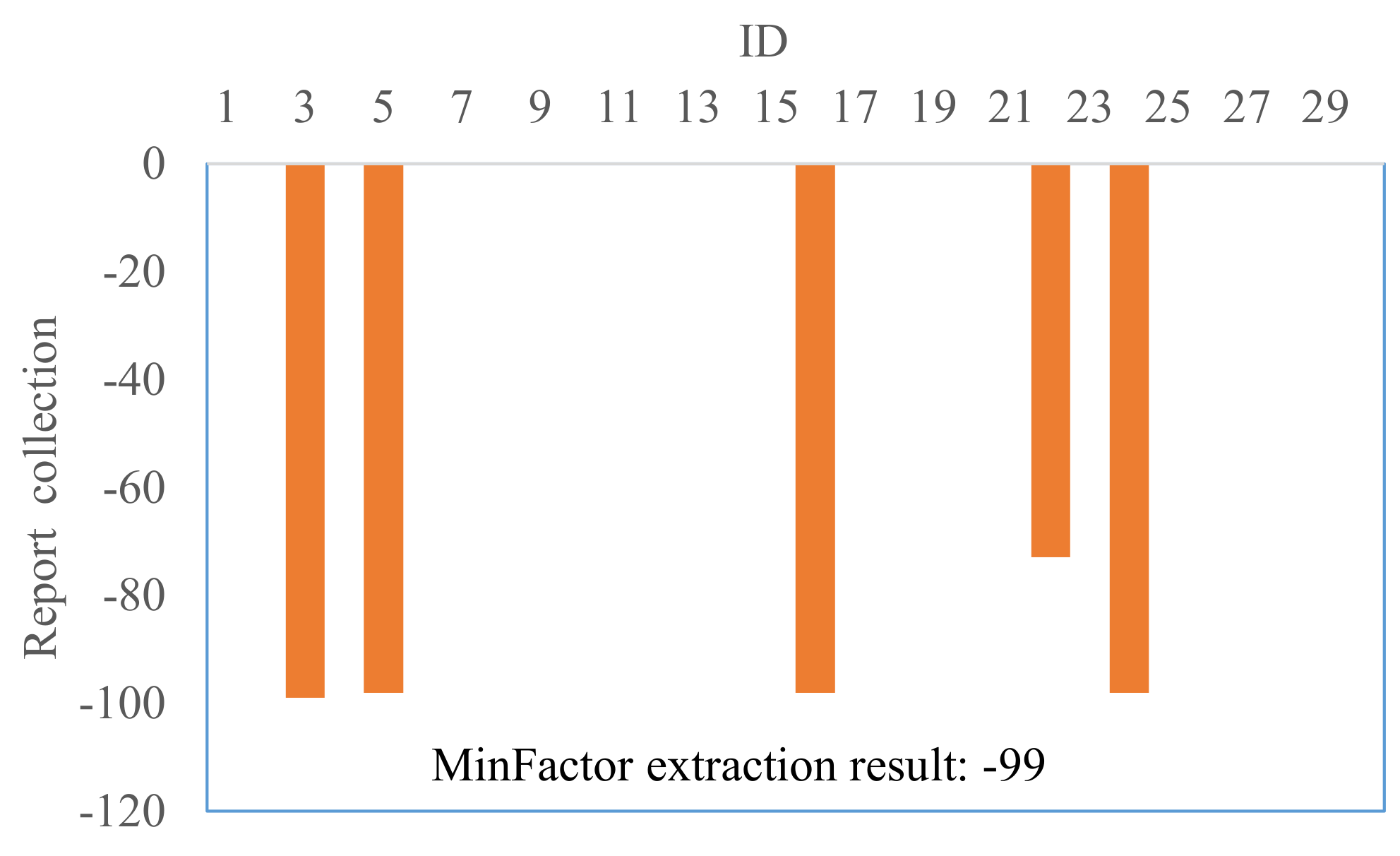
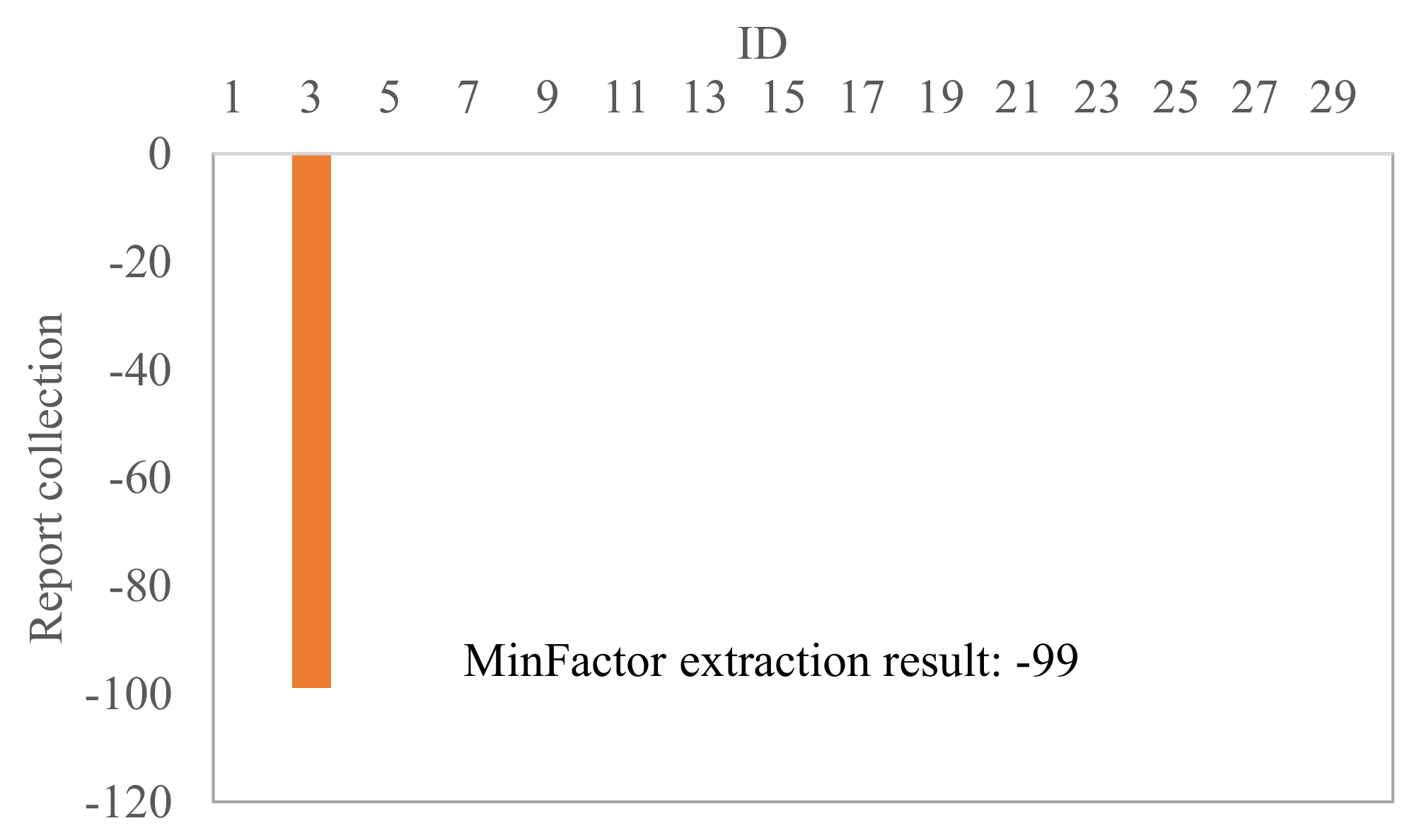
Figure 8 illustrates the collection of reports at the edge server in Scenario 1. There were five reports collected at the edge server after the local extraction of sensing information. The final result of MinFactor was −99.
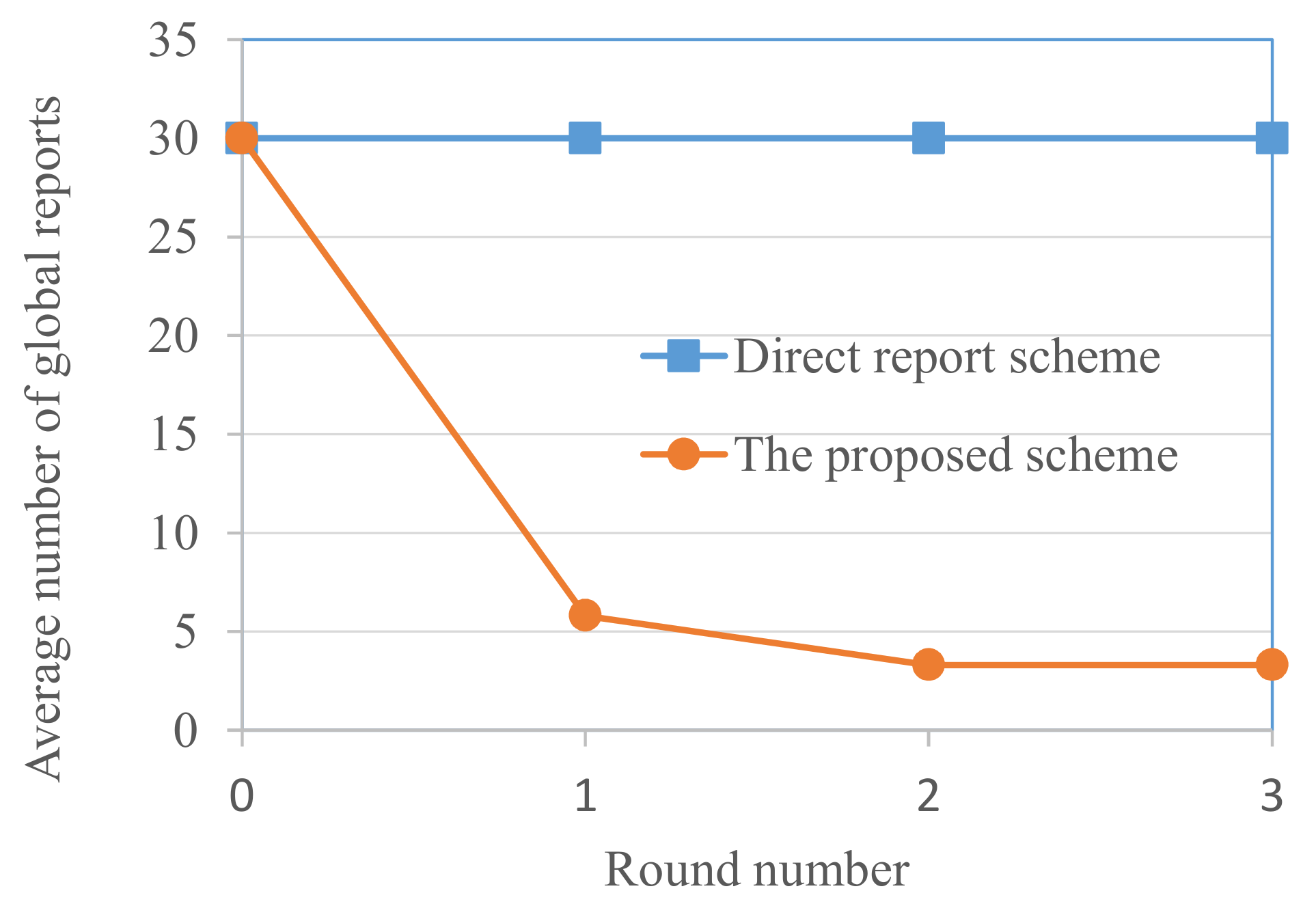
Figure 9 shows the average number of global results corresponding to each round of local exchange among vehicles in Scenario 2. After the first round exchange, the proposed scheme resulted in 5.8 vehicles that needed to report their sensing results to the edge server. After the second round exchange, the number of vehicles that needed to make a global report was reduced to 3.3. After the third round exchange, the number of vehicles that needed to make global report did not change.
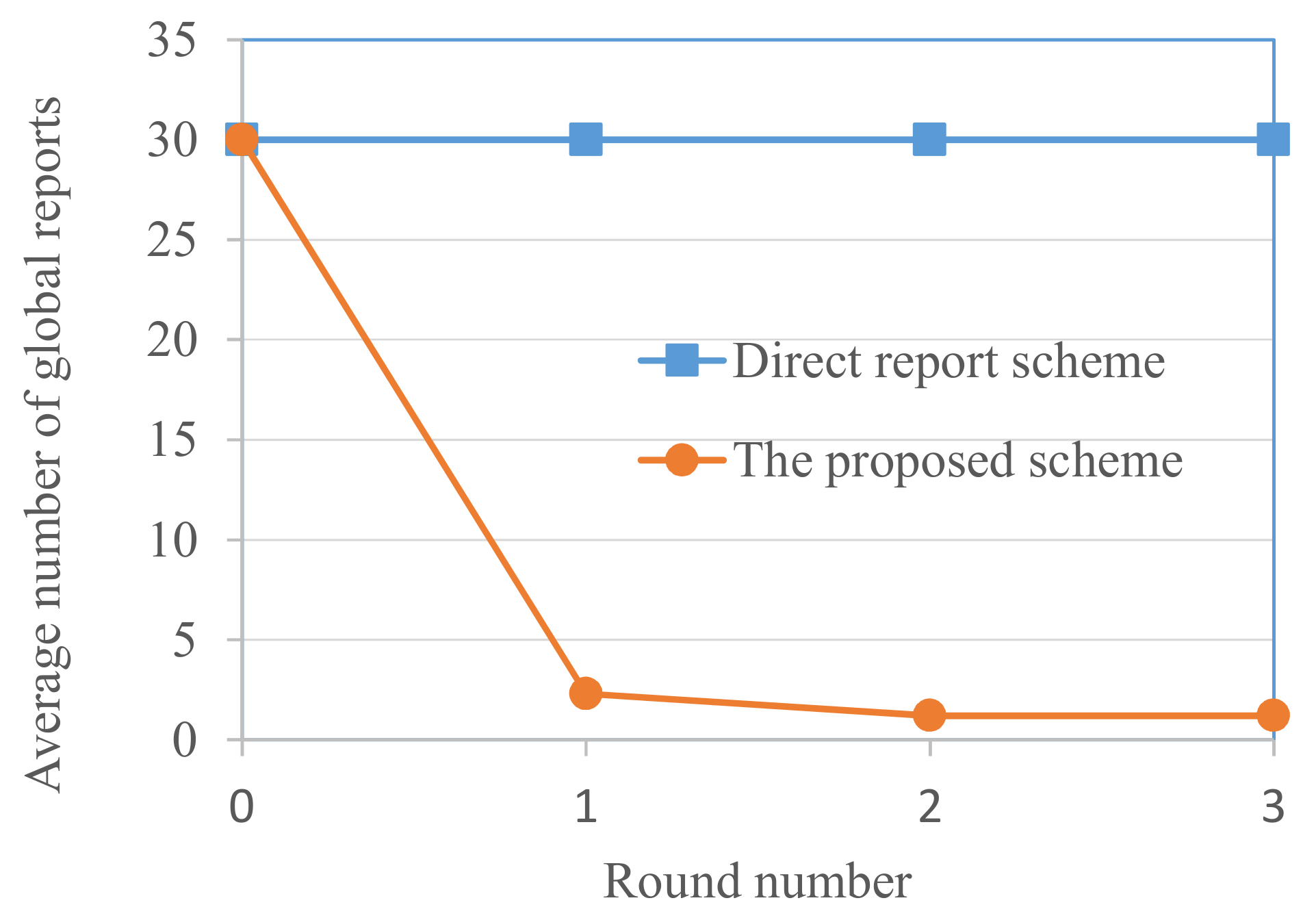
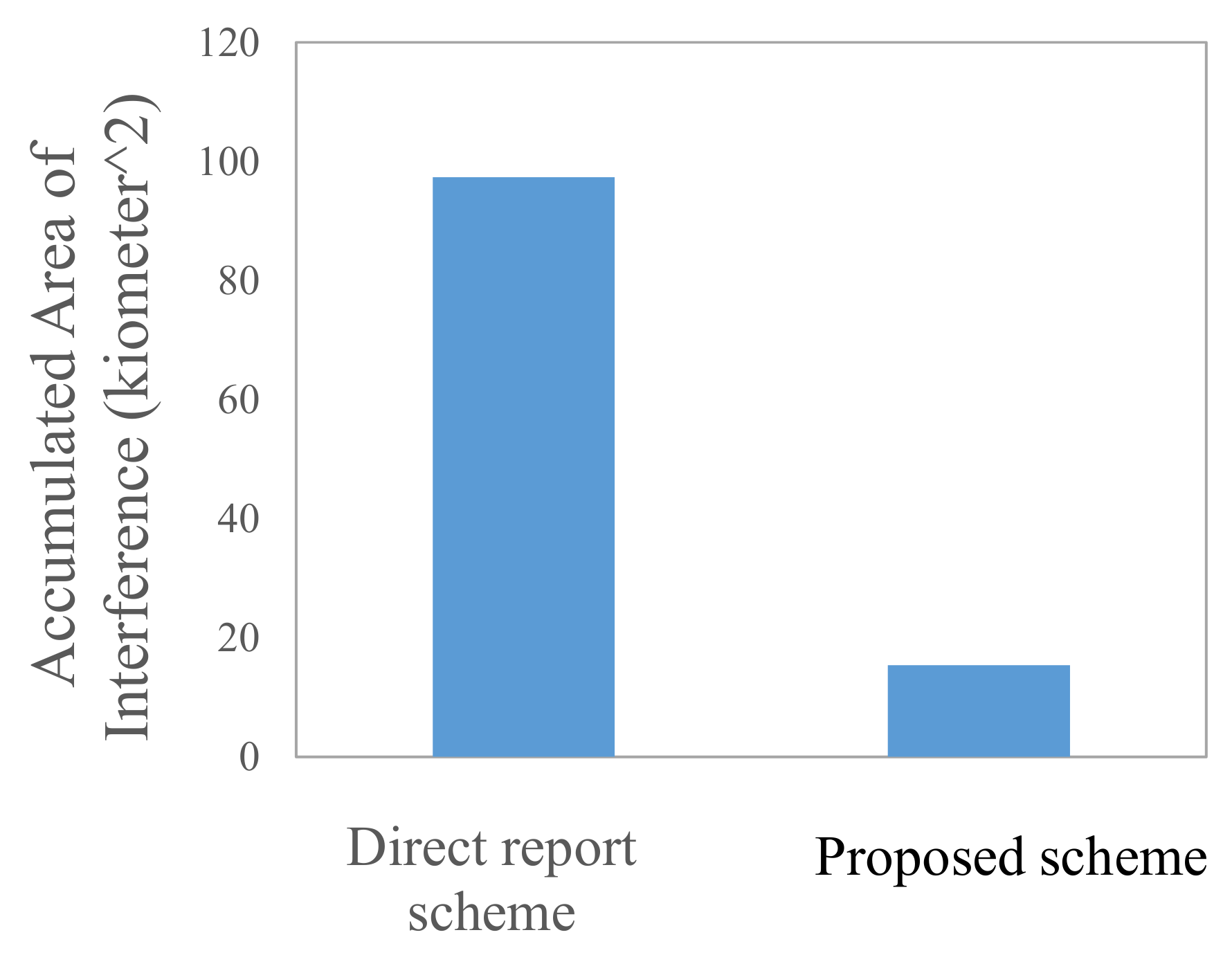
Figure 10 illustrates the result of the average amount of consumption of wireless resources in terms of accumulated interference area in the extraction of sensing information with local cooperation among vehicles in Scenario 1. The proposed scheme resulted in a more than 80 percent reduction of wireless resource consumption compared with the direct report scheme. This is because the short communication range is utilized in the local exchange between vehicles and the unnecessary global reports are restrained.
Figure 11 shows the necessary number of vehicles that needed the global report of results to the edge server in Scenario 3 regarding the proposed scheme. The number of global reports before the local exchange of sensing information was 30. After the first round of local exchange, there were only 4 vehicles that needed to report its sensing results to the edge server. After the second round of local exchange, there was only 1 vehicle that needed to report its sensing results to the edge server. We think that the decrease in the global report number was caused by the local extraction of object sensing information and the prohibition of unnecessary reports at each vehicle.
To confirm the connectivity among vehicles, we examined the graph features of vehicles.
Figure 12 shows the graph topology of the corresponding vehicles examined in Scenario 3. There is only one component in the graph of vehicles that utilized a local communication range between them.
Figure 13 shows the result of MinFactor, which was extracted at each vehicle during the exchange of sensing results among vehicles in Scenario 3 regarding the proposed scheme. Although the MinFactor at the vehicles were initially diverse before the exchange of sensing results, there was a significant decrease in the diversity of MinFactor among vehicles after the first round of exchange, and the diversity of MinFactor information came to a consensus.
Figure 14 illustrates the collection of reports at the edge server in Scenario 3 regarding the proposed scheme. There was one report collected at the edge server after the local extraction of sensing information. The final result of MinFactor was −99.
Figure 15 shows the average number of global results corresponding to each round of local exchange among vehicles in Scenario 4. After the first round exchange, the proposed scheme resulted in 2.3 vehicles that needed to report their sensing results to the edge server. After the second round exchange, the number of vehicles that needed to make a global report was reduced to 1.2. After the third round exchange, the number of vehicles that needed to make global report did not change.
Figure 16 illustrates the result of the average amount of consumption of wireless resources in terms of accumulated interference area in the extraction of sensing information with local cooperation among vehicles in Scenario 4. The proposed scheme results in a more than 70 percent reduction of wireless resource consumption compared with the direct report scheme. This is because the short communication range are utilized in the local exchange between vehicles and the unnecessary global reports were restrained.
Appendix A further examines the general property of scalability of the proposed scheme, regarding the reports to the edge server. Based on mathematical modeling analysis, we find that the proposed scheme enables the number of necessary reports to the edge server to be scalable with the number of vehicles.
6. Discussion and Future Work
As shown in the evaluation results, multiple rounds of sensing-data exchanges among vehicles result in a small number of reports from vehicles to the edge server. On the other hand, a large number of exchange rounds incurs a longer time for the edge server to extract the object sensing information.
Some object sensing information may need to be quickly shared among vehicles and the edge server, such as the results of obstacle detection and emergency-related information. On the other hand, there is also other sensing information that is considered to be tolerant to a small delay within a few hundreds of milliseconds. In this paper, we suppose that the object information such as communication quality, or the free space between vehicles, is not quickly changed within a few hundreds of milliseconds.
From the evaluation results, we find that even a small number of rounds of sensing-data exchanges are effective to reduce the traffic load at the edge server. Hence, we can select a small number of exchange rounds in case the object sensing information varies quickly.
The proposed method has a low level of computing complexity at both vehicles and the edge server. First, in the local extraction of the minimum factor of sensing results, a vehicle mainly needs to find and update the minimum sensing value in a collection of sensing results obtained in the exchange sensing information among nearby vehicles. The maximum number of sensing results collected at a vehicle is not larger than the number vehicles in the road region, in which a BS/AP collects sensing information. Second, for an edge server to enable the global extraction of the minimum factor of the sensing results, the edge server only needs to find the minimum sensing value in a collection of sensing reports obtained in the exchange sensing information among nearby vehicles. The maximum number of sensing reports to the edge server is also not larger than the number of vehicles in the road region, to which a BS/AP collects sensing information.
In this paper, the study topic focuses more on the cooperation mechanism of information sharing and extraction among vehicles and the edge server. We suppose that the sensing data at each vehicle are reliable. As for future work, we will examine the reliability issue of the information sharing and extraction from vehicles.
7. Conclusions
This paper examines the extraction of sensing information from vehicles for the extended sensing-perception at V2X edge servers. The proposed method enables the combination of local cooperation among vehicles and vehicle-edge communications in the extraction of sensing information to reduce wireless resource consumption and the traffic load at the V2X edge server. We employed the MinFactor of the sensing results as the main example of target information extraction. The MinFactor extraction can be applied to assess the appropriate broadcast time, channel condition, and driving safety. The evaluation results reveal that the number of global reports and the wireless resources consumption are significantly reduced by utilizing the proposed scheme in the extraction of sensing information from vehicles. The proposed method reduces the report traffic at the BS/AP by utilizing the local exchange and extraction of sensing results among vehicles before the global collection and extraction of sensing information at the edge server. This procedure allows the system to avoid the unnecessary reports to the edge server and highly reduces the traffic of sensing information reports. The proposed method is expected to be applied to reliable broadcasts in V2X and to maneuver coordination among vehicles. For instance, utilization of the proposed method facilitates the setup of the transmission power in broadcasts at the BS/AP according to the extracted RSSI or RSRP information of vehicles.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}