
Interactive Visualization of Geographic Vector Big Data Based on Viewport Generalization Model


Abstract
:1. Introduction
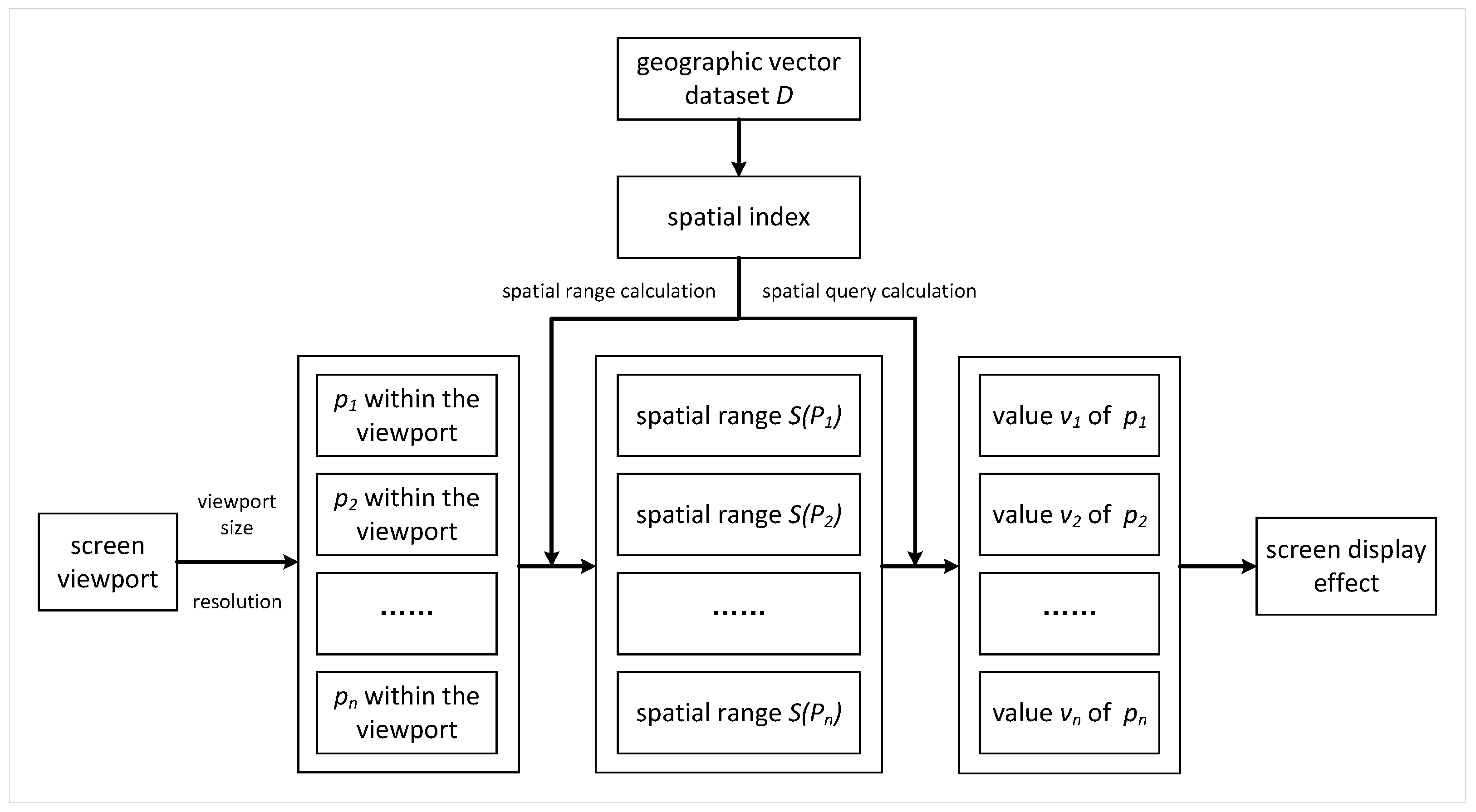
- A visualization model based on the viewport generalization strategy is proposed. The method takes the display pixels in the viewport area as processing units and analyzes the distribution of geographic vector data within the spatial range mapped by each unit; the analysis results are used to generate the display values of the unit. This model completely changes the traditional processing idea that geographical vector elements are treated as processing units. In the model, the computational problem of drawing geographic vector data is transformed into a spatial analysis problem of judging the distribution of geographic features in a spatial range mapped by the pixel unit. Furthermore, the computational complexity dependent on vector feature size is transformed such that it is instead dependent on the viewport display pixel size. When the pixel size of the viewport is much smaller than that of the geographic vector data, the visualization efficiency is greatly improved.
- The index structure supporting the viewport generalization visualization model—viewport pixel quadtree (VPQ)—is designed. The structure takes viewports and their display pixels as index objects, records the distribution of geographic vector data in the pixel-mapping space, and accelerates the analysis and calculation of the display values of each pixel in the viewport region by a pruning strategy. The structure takes the viewport display pixel containing vector elements in the mapping spatial range as the index object, records the distribution of geographic vector data in the mapping spatial range of the pixel, and accelerates the analysis and calculation of the display value of each pixel in the viewport region by a pruning strategy.
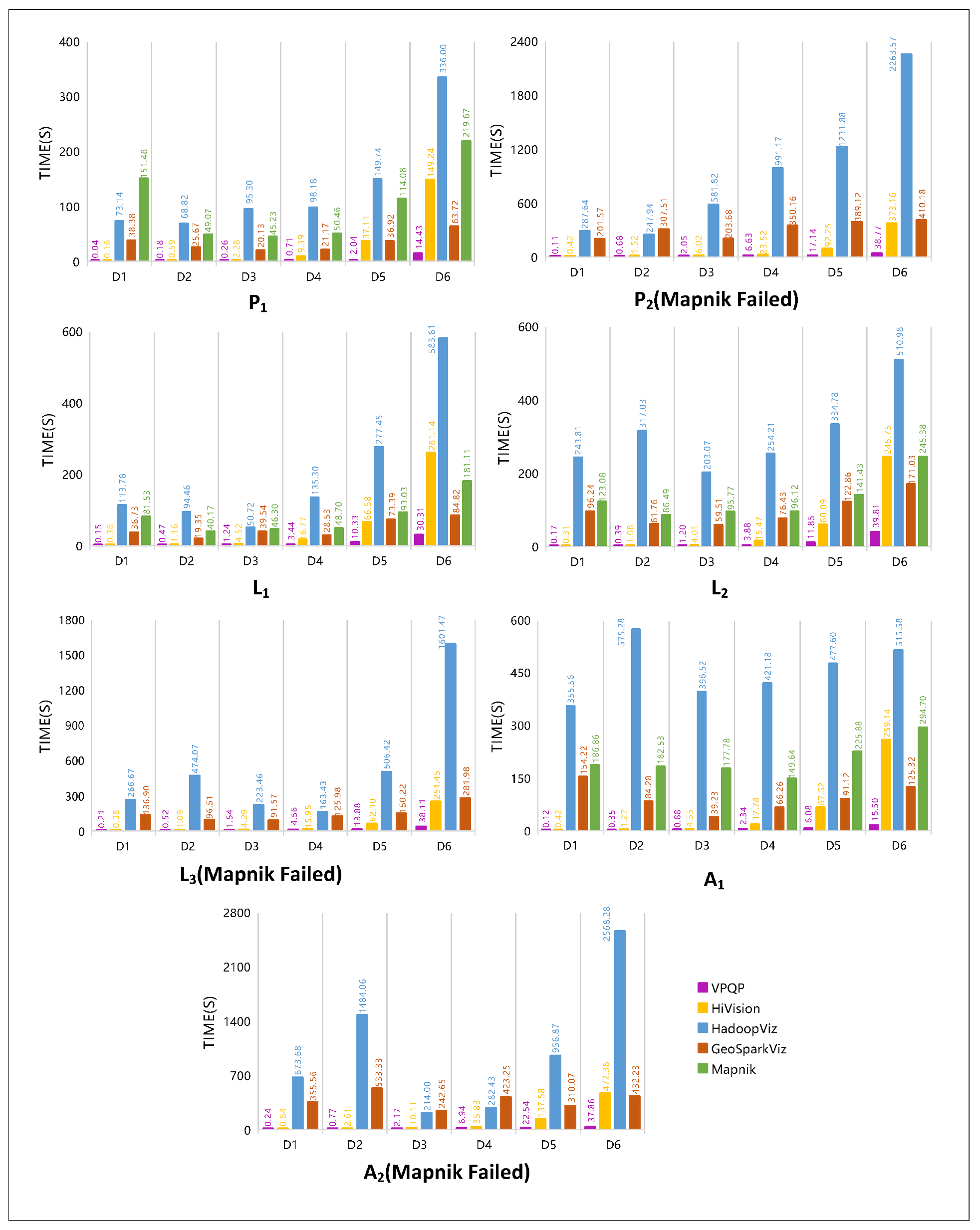
- Based on the computational characteristics of the viewport generalization model, a parallel algorithm for the online interactive visualization of geographic vector data based on the VPQ index is proposed. Compared with the existing methods, it has an obvious speed advantage and can better support the needs of BGVD interactive visualization in the network environment. At the same time, due to the high computational speed of the proposed method, the visualization results of geographic vector data at all scales can be calculated in real time, without the need to generate a cache picture through predictive calculation. Therefore, compared with the existing visualization methods based on the physical tile cache, it has the obvious advantage of saving cache storage space.
2. Related Work
3. Materials and Methods
3.1. Viewport Generalization Visualization Model
3.2. Viewport Pixel Quadtree Index Structure
3.2.1. Structure Design of VPQ
- (1)
- : The unique identification coding of the node. In order to speed up the spatial intersection calculation efficiency, the node coding adopts Geohash coding.
- (2)
- : The spatial range of the node.
- (3)
- : The number of geographical vector features contained in the node.
- (4)
- : Pointers to the four children of the node.
- (5)
- : The depth of the node in VPQ.
3.2.2. Construction Method of VPQ
| Algorithm 1: BBOXIntersectedGeometry: determine the intersection relationship between spatial range and geographic vector features. |
| input: spatial range rectangle , geographic vector feature p. output: True: intersection; False: non-intersection 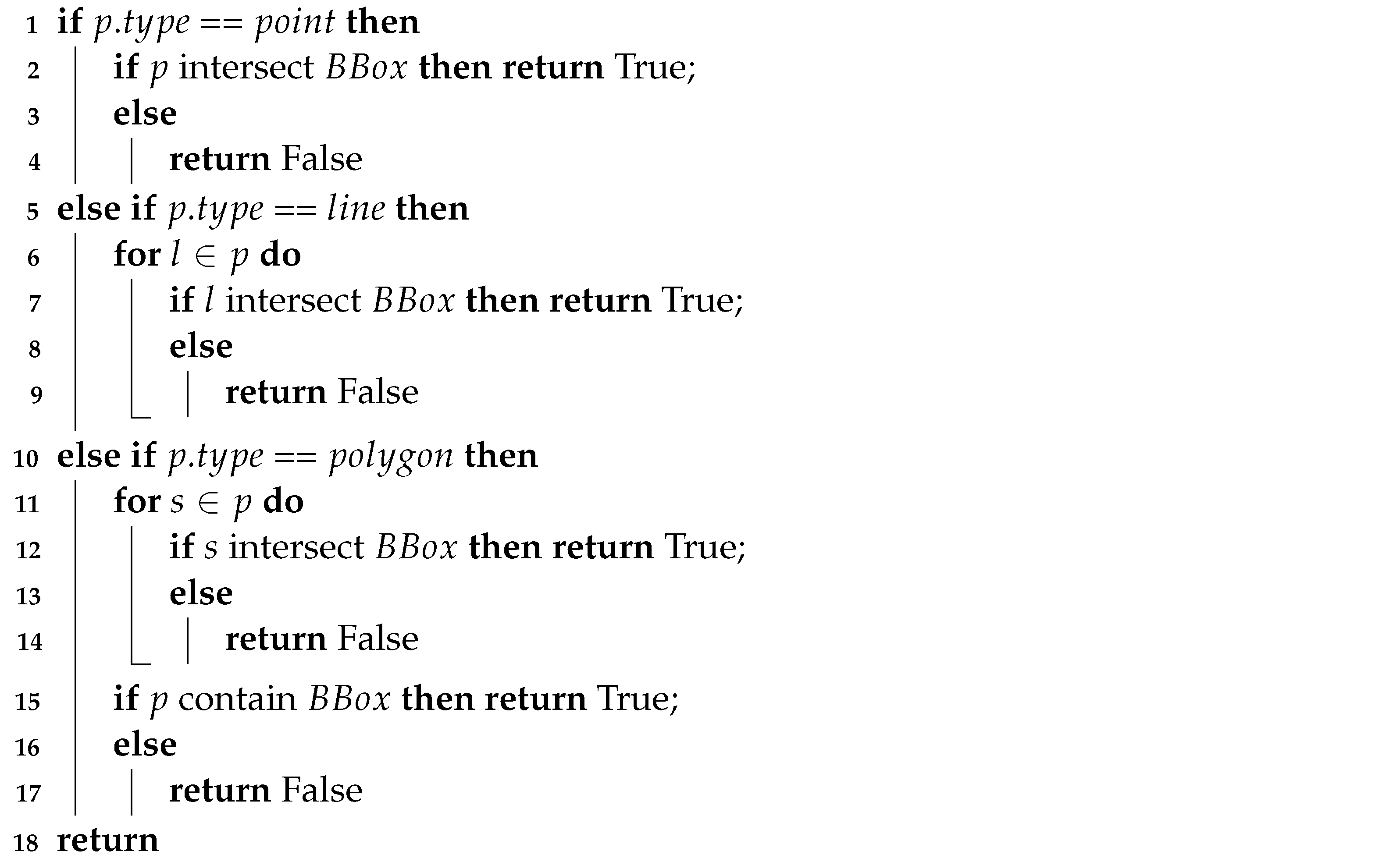 |
- (1)
- Create the root node of the VPQ index according to the global spatial range and set the maximum depth of the VPQ index.
- (2)
- Perform the necessary coordinate transformation and perform the following Steps 3 to 6 for each feature in the input geographic vector data.
- (3)
- Take the VPQ root node as the current index node R.
- (4)
- The counter, , of the R increases by 1. If the level, , does not reach the maximum depth, the spatial range, , of R is divided into four spatial subranges, (upper left), (upper right), (lower left), and (lower right), and algorithm 1 is adopted to test the intersection between the current geographic vector feature p and the four subregions one by one. If it intersects, the pointer will be positioned at the child node. If the child node does not exist, the child node of the corresponding region will be generated.
- (5)
- For each newly positioned child node, take it as the new current node R and skip to Step 4 to continue the execution.
- (6)
- Continue until there are no new positioning nodes.
3.3. VPQTree-Based Preview Algorithm of BGVD
- (1)
- Calculate the corresponding spatial range of the pixel according to the pixel number.
- (2)
- Encode the spatial range of the pixel, and set the number of encoding times to 8 at the tile level to which the pixel belongs, so as to obtain the Geohash encoding of the pixel.
- (3)
- Start the query from the root node of VPQ index, and take the root node as the current query node S.
- (4)
- Match the Geohash encoding of the pixel with the encoding of the child node of query node S.
- (5)
- If the two encodings exhibit “partial matching”, the last two digits of the matching result are used: if they are“00”, the pointer is positioned to the lower left child node; if they are “10”, the pointer is positioned to the lower right child node; if they are “01”, the pointer is positioned to the upper left child node; and if they are “11”, the pointer is positioned to the upper right child node. Otherwise, the pixel value does not need to be generated and the process ends.
- (6)
- Take the newly positioned index node as the new current query node S and skip to Step 4 to continue the execution.
- (7)
- The pixel value is generated until the encoding of the child node of query node S and the encoding of the pixel exhibit “equal matching”.
| Algorithm 2: The VPQP algorithm of geographic vector data. |
| input: VPQ index , pixel P, tile level z, threshold of vector features . output: True: the value of pixel P is generated; False: the value of pixel P is not generated.  |
4. Experiment
4.1. Experiment Settings
4.2. Comparative Analysis of Geographic Vector Data Visualization Performance
4.3. Analysis of Real-Time Preview Performance
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| GIS | geographic information system |
| VPQ | viewport pixel quadtree |
| VGVM | viewport generalization visualization model |
References
- Zhou, C. Prospects on pan-spatial information ssystem. Prog. Geogr. 2015, 34, 129–131. [Google Scholar] [CrossRef]
- Robinson, A.C.; Demšar, U.; Moore, A.B.; Buckley, A.; Jiang, B.; Field, K.; Kraak, M.J.; Camboim, S.P.; Sluter, C.R. Geospatial big data and cartography: Research challenges and opportunities for making maps that matter. Int. J. Cartogr. 2017, 3, 32–60. [Google Scholar] [CrossRef] [Green Version]
- OPENSTREETMAP. Openstreetmap. Available online: https://www.openstreetmap.org/ (accessed on 25 June 2022).
- Natural Resources Ministry of China. Bulletin of the Third National Land Survey. Available online: http://www.mnr.gov.cn/dt/ywbb/202108/t20210826_2678340.html (accessed on 25 June 2022).
- Monmonier, M. Strategies for the Visualization of Geographic Time-Series Data. In Classics in Cartography; Wiley: Hoboken, NJ, USA, 2011; pp. 55–72. [Google Scholar] [CrossRef]
- Ghosh, S. Interactive Visualization for Big Spatial Data. In Proceedings of the 2019 International Conference on Management of Data, Amsterdam, The Netherlands, 30 June–5 July 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 1826–1828. [Google Scholar] [CrossRef]
- Li, S.; Dragicevic, S.; Castro, F.A.; Sester, M.; Winter, S.; Coltekin, A.; Pettit, C.; Jiang, B.; Haworth, J.; Stein, A.; et al. Geospatial big data handling theory and methods: A review and research challenges. ISPRS J. Photogramm. Remote. Sens. 2016, 115, 119–133. [Google Scholar] [CrossRef] [Green Version]
- Çoltekin, A.; Griffin, A.L.; Slingsby, A.; Robinson, A.C.; Christophe, S.; Rautenbach, V.; Chen, M.; Pettit, C.; Klippel, A. Geospatial information visualization and extended reality displays. In Manual of Digital Earth; Springer: Singapore, 2020; pp. 229–277. [Google Scholar]
- Zhu, Q.; Fu, X. The Review of Visual Analysis Methods of Multi-modal Spatio-temporal Big Data. Acta Geod. Cartogr. Sin. 2017, 46, 1672–1677. [Google Scholar] [CrossRef]
- Cruz, I.F.; Ganesh, V.R.; Caletti, C.; Reddy, P. GIVA: A Semantic Framework for Geospatial and Temporal Data Integration, Visualization, and Analytics. In Proceedings of the 21st ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Orlando, FL, USA, 5–8 November 2013; Association for Computing Machinery: New York, NY, USA, 2013; pp. 544–547. [Google Scholar] [CrossRef]
- Yao, X.; Li, G. Big spatial vector data management: A review. Big Earth Data 2018, 2, 108–129. [Google Scholar] [CrossRef]
- Wan, L.; Huang, Z.; Peng, X. An Effective NoSQL-Based Vector Map Tile Management Approach. ISPRS Int. J. -Geo-Inf. 2016, 5, 215. [Google Scholar] [CrossRef] [Green Version]
- Guo, M.; Guan, Q.; Xie, Z.; Wu, L.; Luo, X.; Huang, Y. A spatially adaptive decomposition approach for parallel vector data visualization of polylines and polygons. Int. J. Geogr. Inf. Sci. 2015, 29, 1419–1440. [Google Scholar] [CrossRef]
- Li, J.; Wu, H.; Yang, C.; Wong, D.W.; Xie, J. Visualizing dynamic geosciences phenomena using an octree-based view-dependent LOD strategy within virtual globes. Comput. Geosci. 2011, 37, 1295–1302. [Google Scholar] [CrossRef]
- Laura, J.; Rey, S.J. Improved Parallel Optimal Choropleth Map Classification. In Modern Accelerator Technologies for Geographic Information Science; Shi, X., Kindratenko, V., Yang, C., Eds.; Springer: Boston, MA, USA, 2013; pp. 197–212. [Google Scholar] [CrossRef]
- Tang, W. Parallel construction of large circular cartograms using graphics processing units. Int. J. Geogr. Inf. Sci. 2013, 27, 2182–2206. [Google Scholar] [CrossRef]
- Eldawy, A.; Mokbel, M.F.; Alharthi, S.; Alzaidy, A.; Tarek, K.; Ghani, S. SHAHED: A MapReduce-based system for querying and visualizing spatio-temporal satellite data. In Proceedings of the 31st International Conference on Data Engineering, Seoul, Korea, 13–17 April 2015; pp. 1585–1596. [Google Scholar] [CrossRef] [Green Version]
- Eldawy, A.; Mokbel, M.F.; Jonathan, C. HadoopViz: A MapReduce framework for extensible visualization of big spatial data. In Proceedings of the 32nd International Conference on Data Engineering (ICDE), Helsinki, Finland, 16–20 May 2016; pp. 601–612. [Google Scholar] [CrossRef]
- Yu, J.; Sarwat, M. GeoSparkViz: A cluster computing system for visualizing massive-scale geospatial data. VLDB J. 2021, 30, 237–258. [Google Scholar] [CrossRef]
- Yu, J.; Tahir, A.; Sarwat, M. GeoSparkViz in Action: A Data System with Built-in Support for Geospatial Visualization. In Proceedings of the 35th International Conference on Data Engineering (ICDE), Macao, China, 8–11 April 2019; pp. 1992–1995. [Google Scholar] [CrossRef]
- Ma, M.; Wu, Y.; Ouyang, X.; Chen, L.; Li, J.; Jing, N. HiVision: Rapid visualization of large-scale spatial vector data. Comput. Geosci. 2021, 147, 104665. [Google Scholar] [CrossRef]
- Ma, M.; Yang, A.; Wu, Y.; Chen, L.; Li, J.; Jing, N. DiSA: A Display-driven Spatial Analysis Framework for Large-Scale Vector Data. In Proceedings of the 28th International Conference on Advances in Geographic Information Systems, Seattle, WA, USA, 3–6 November 2020; pp. 147–150. [Google Scholar] [CrossRef]
- Liu, Z.; Chen, L.; Yang, A.; Ma, M.; Cao, J. HiIndex: An Efficient Spatial Index for Rapid Visualization of Large-Scale Geographic Vector Data. ISPRS Int. J. -Geo-Inf. 2021, 10, 647. [Google Scholar] [CrossRef]
- Chen, L.; Liu, Z.; Ma, M. HiVecMap: A parallel tool for real-time geovisualization of massive geographic vector data. SoftwareX 2022, 19, 101144. [Google Scholar] [CrossRef]
- Samet, H. The quadtree and related hierarchical data structures. ACM Comput. Surv. 1984, 16, 187–260. [Google Scholar] [CrossRef] [Green Version]
- Battersby, S.E.; Finn, M.P.; Usery, E.L.; Yamamoto, K.H. Implications of web Mercator and its use in online mapping. Cartogr. Int. J. Geogr. Inf. Geovis. 2014, 49, 85–101. [Google Scholar] [CrossRef]
- OPENCELLID. OpenCellID. Available online: https://opencellid.org/ (accessed on 25 June 2022).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Type | Records | Size |
|---|---|---|---|
| : OpenCeilliD cell tower locations | point | 40,719,478 | 40,719,478 points |
| : OSM all points on the planet | point | 2,682,401,763 | 2,682,401,763 points |
| : OSM water areas boundaries | linestring | 9,211,000 | 376,208,235 segments |
| : OSM roads | linestring | 72,336,396 | 717,048,198 segments |
| : OSM all linestrings on the planet | linestring | 106,268,554 | 1,573,469,984 segments |
| : OSM buildings | polygon | 114,839,692 | 804,028,282 edges |
| : OSM all polygons on the planet | polygon | 181,772,692 | 2,077,524,465 edges |
| Scene ID | Pixel Size |
|---|---|
| 4096 × 4096 | |
| 8192 × 8192 | |
| 16,384 × 16,384 | |
| 32,768 × 32,768 | |
| 65,536 × 65,536 | |
| 131,072 × 131,072 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, L.; Liu, Z.; Ma, M. Interactive Visualization of Geographic Vector Big Data Based on Viewport Generalization Model. Appl. Sci. 2022, 12, 7710. https://doi.org/10.3390/app12157710
Chen L, Liu Z, Ma M. Interactive Visualization of Geographic Vector Big Data Based on Viewport Generalization Model. Applied Sciences. 2022; 12(15):7710. https://doi.org/10.3390/app12157710
Chicago/Turabian StyleChen, Luo, Zebang Liu, and Mengyu Ma. 2022. "Interactive Visualization of Geographic Vector Big Data Based on Viewport Generalization Model" Applied Sciences 12, no. 15: 7710. https://doi.org/10.3390/app12157710
APA StyleChen, L., Liu, Z., & Ma, M. (2022). Interactive Visualization of Geographic Vector Big Data Based on Viewport Generalization Model. Applied Sciences, 12(15), 7710. https://doi.org/10.3390/app12157710