
Computer Vision System: Measuring Displacement and Bending Angle of Ionic Polymer-Metal Composites




Abstract
:Featured Application
Abstract
1. Introduction
2. Computer Vision System
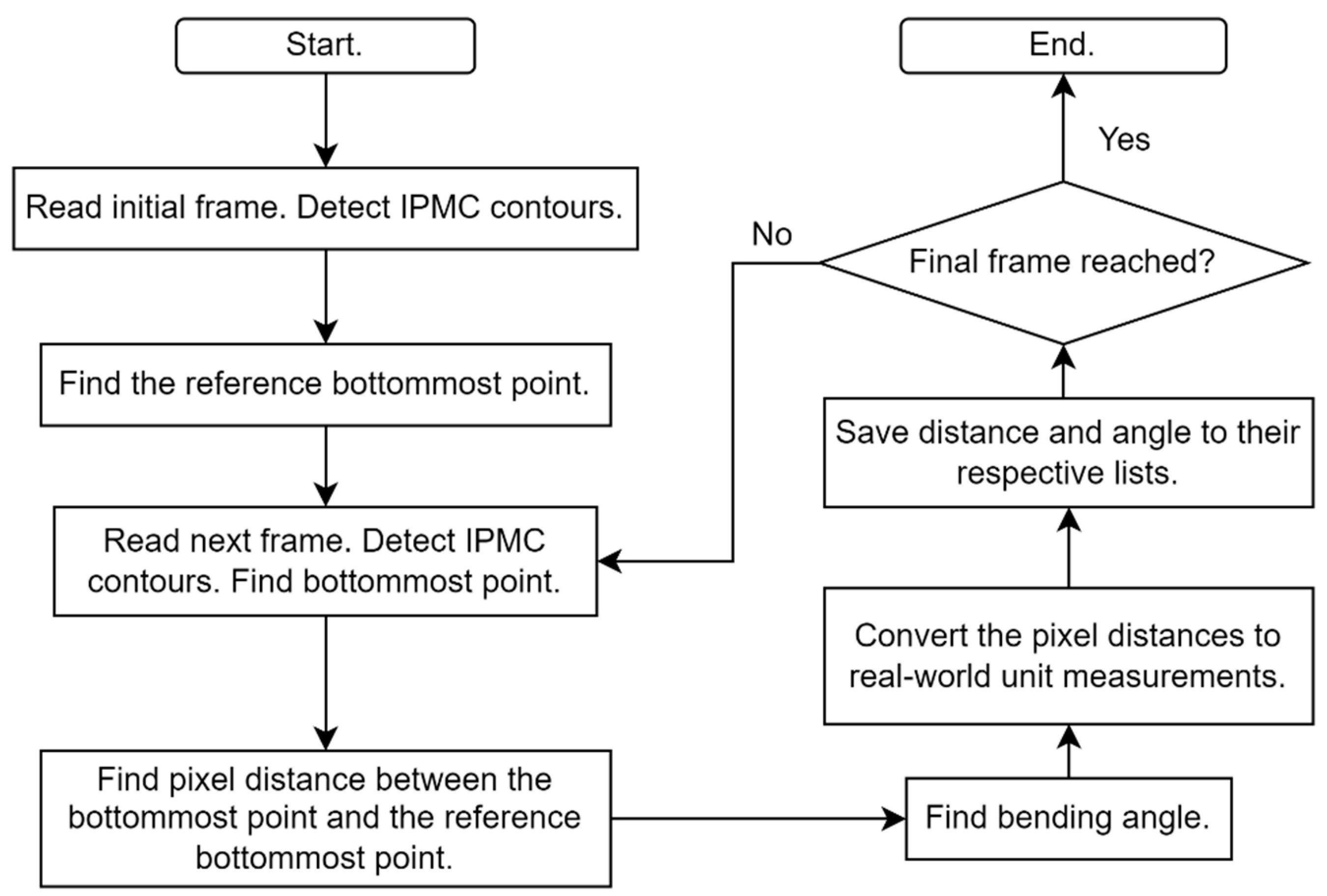
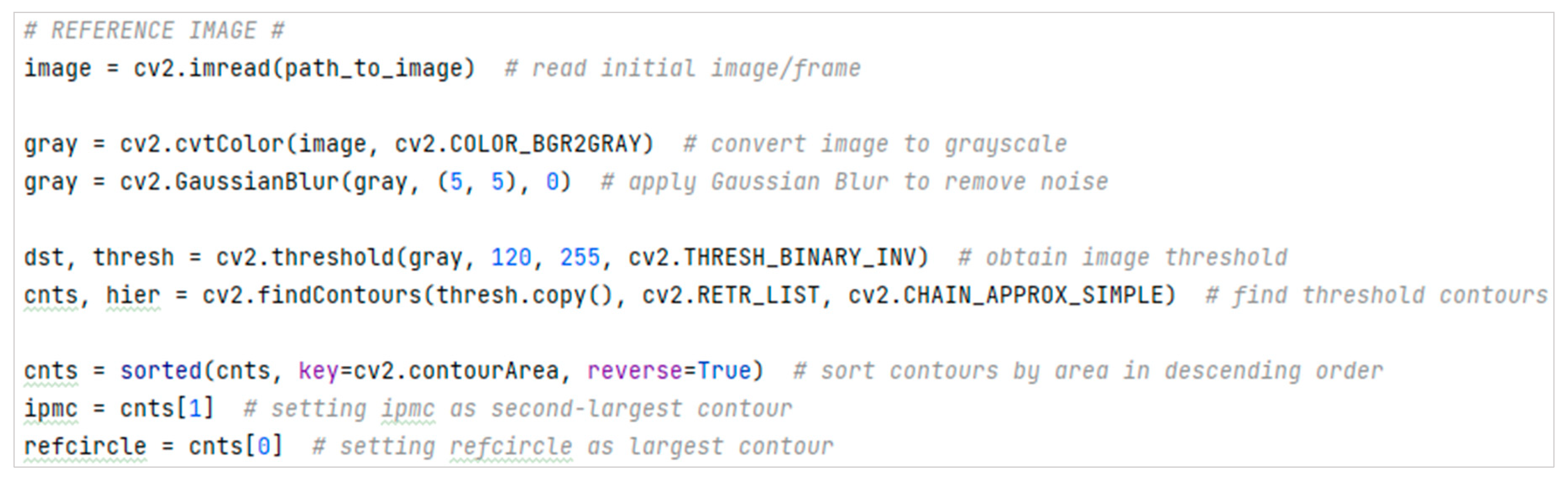
2.1. Code Overview
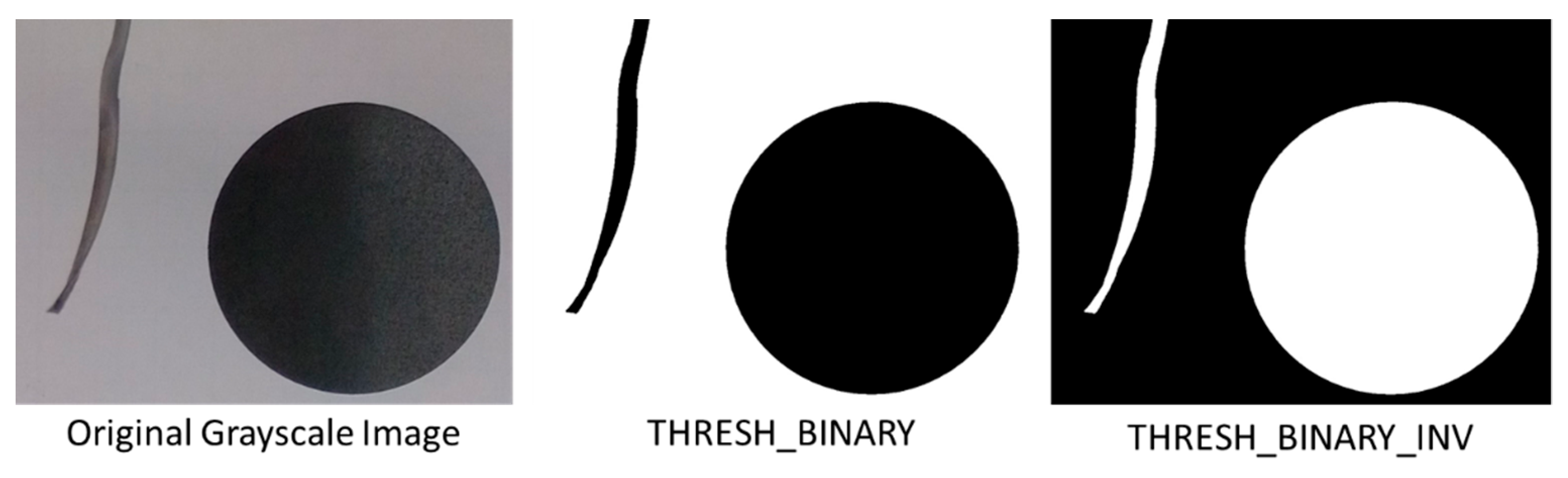
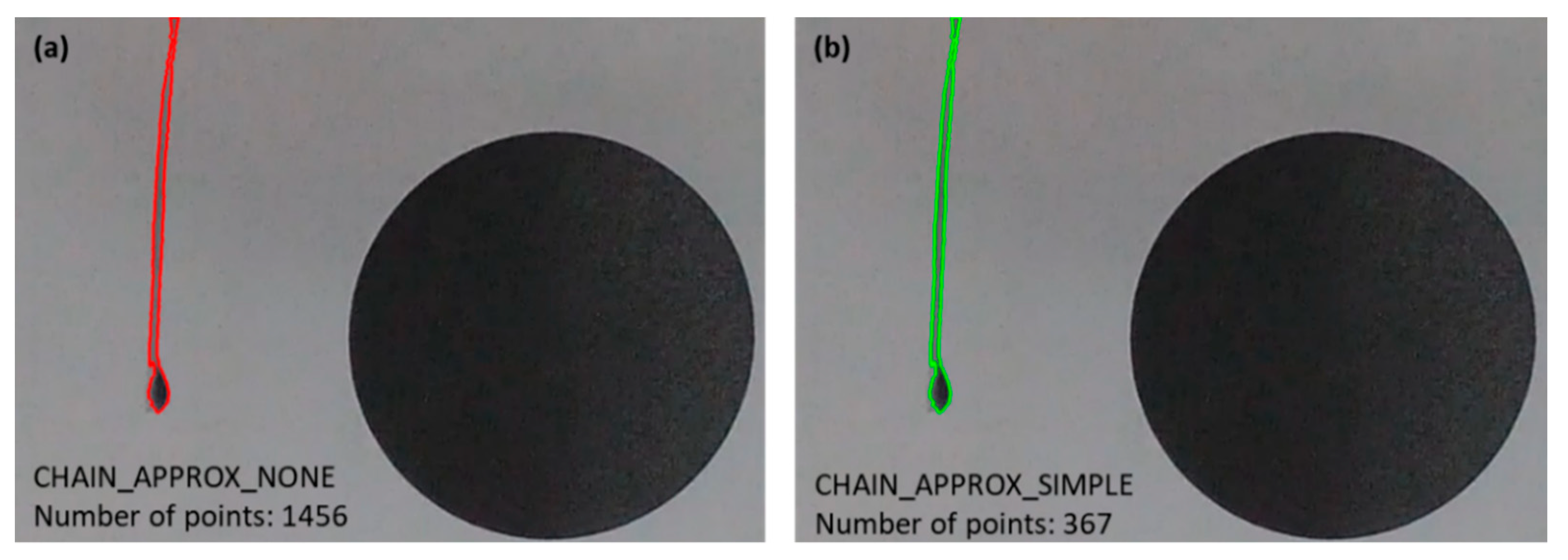
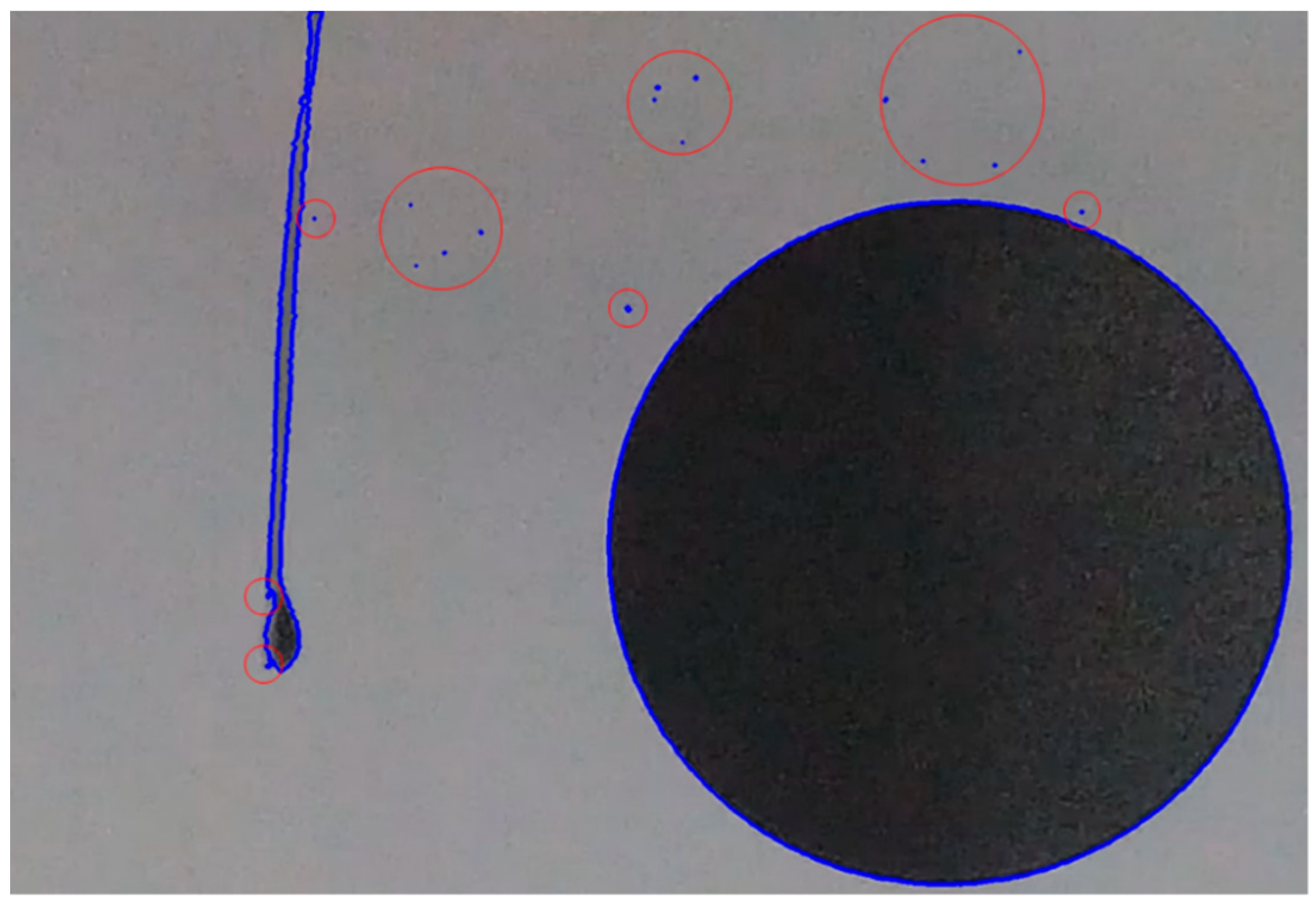
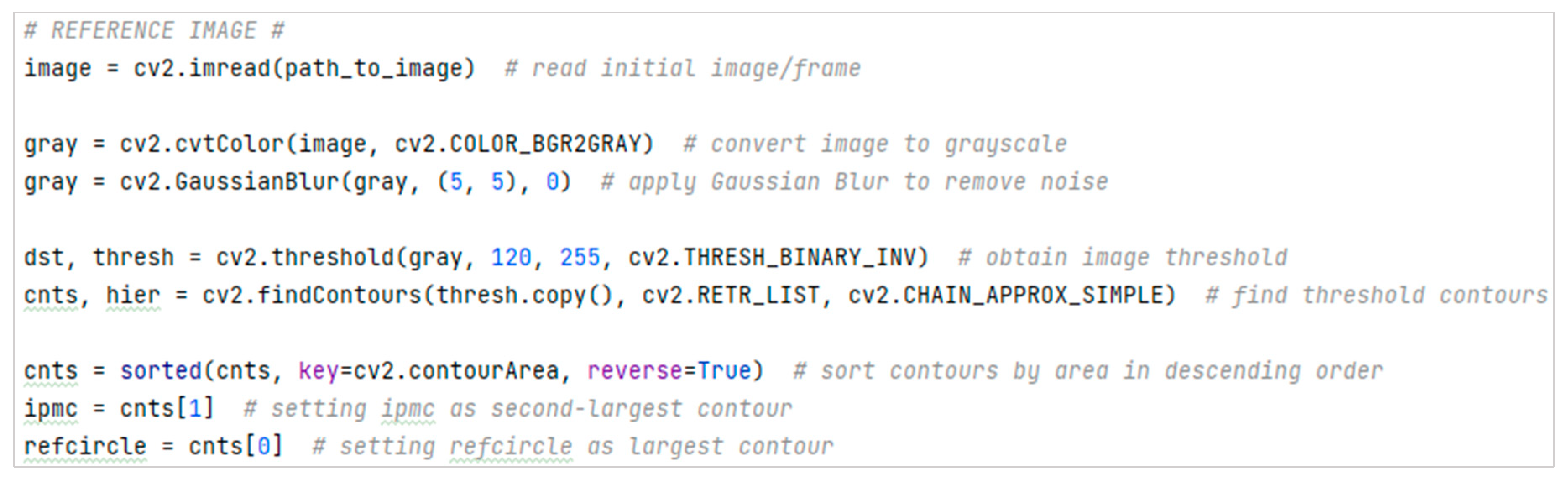
2.2. Contour Detection of IPMC
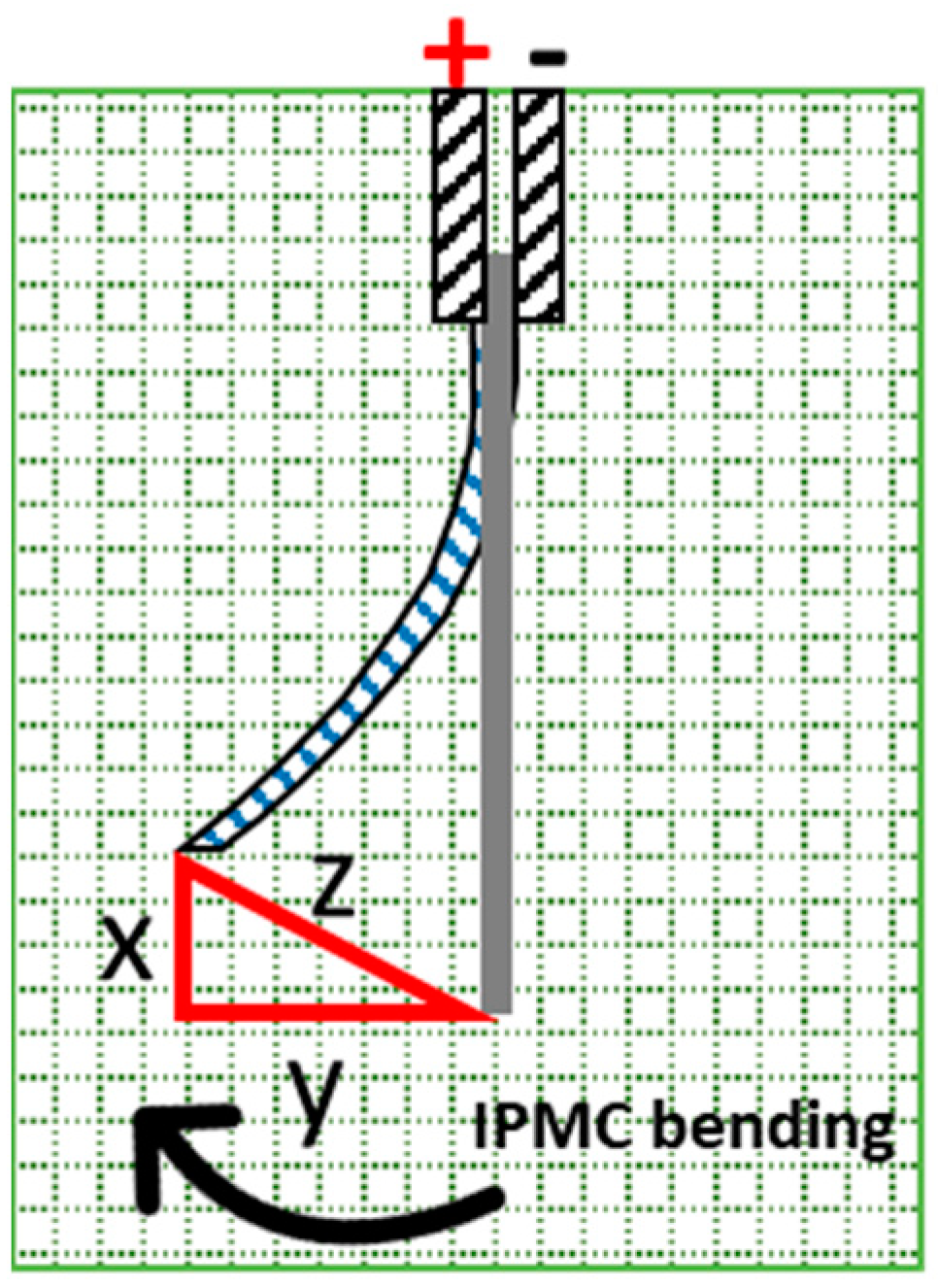
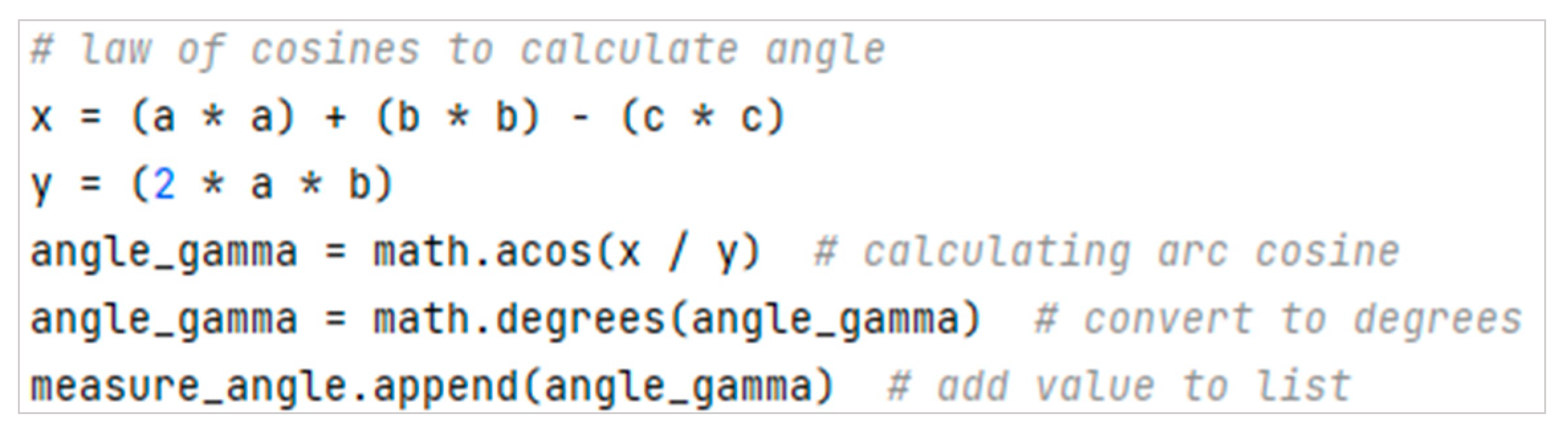
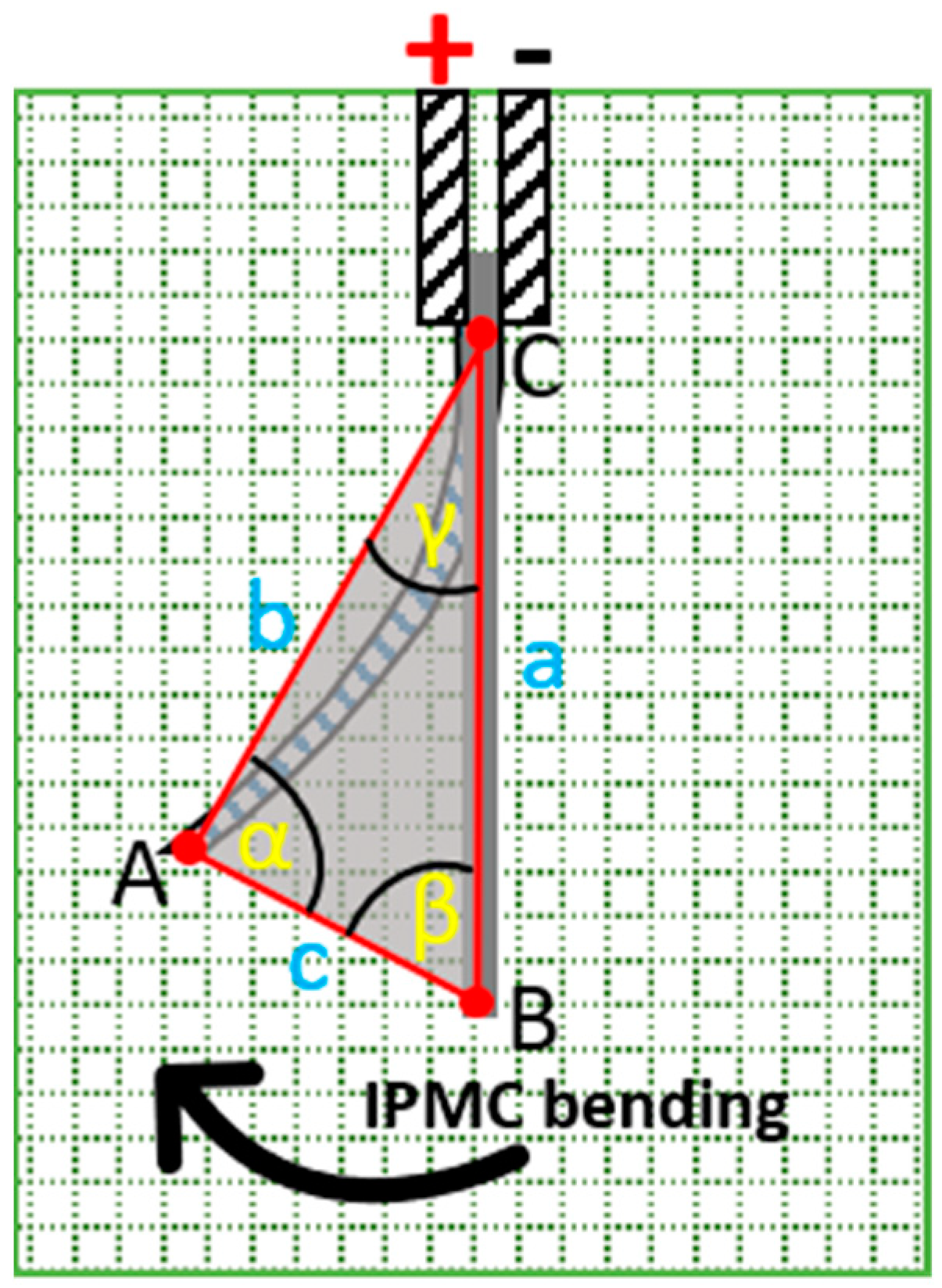
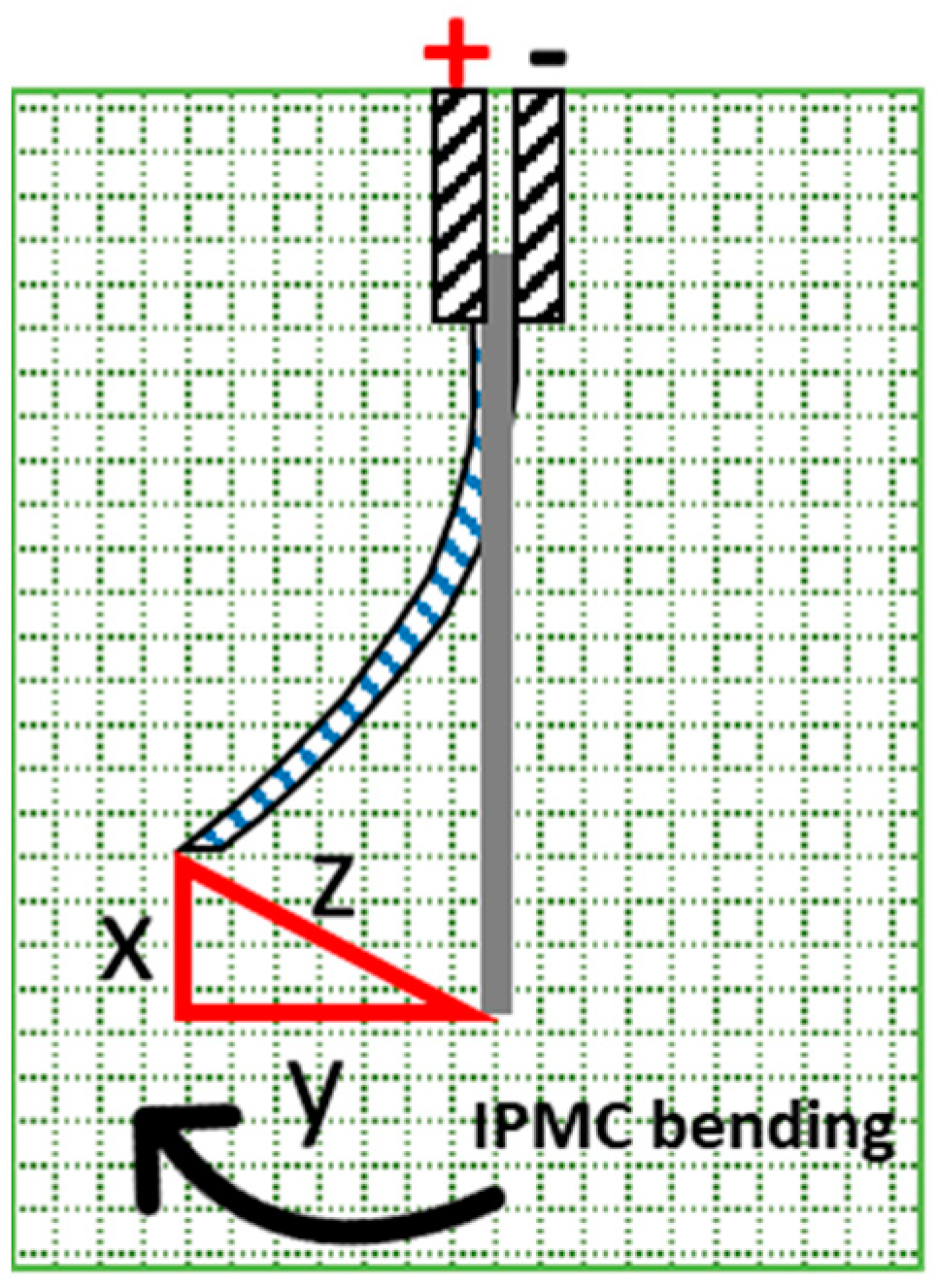
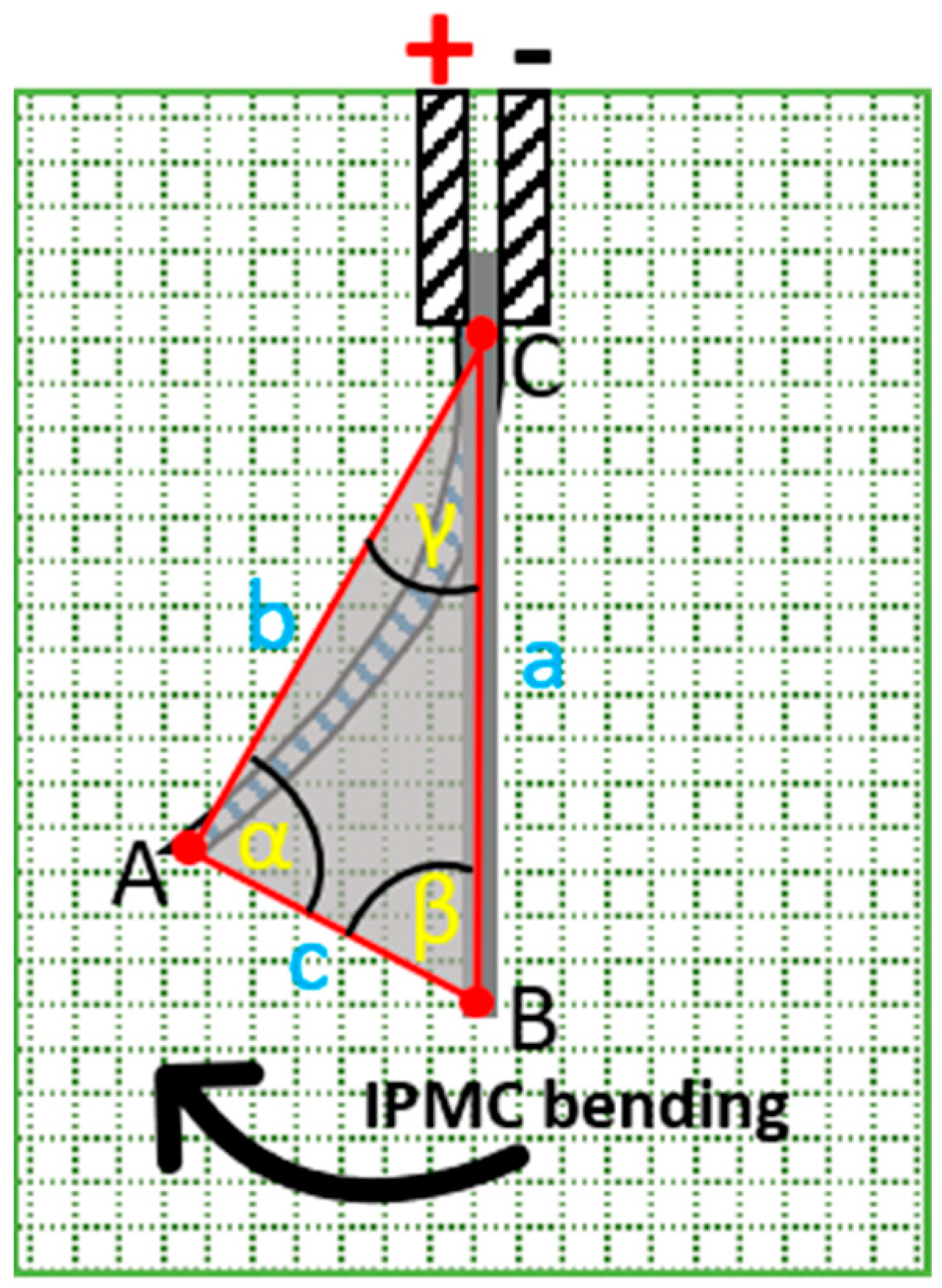
2.3. Contour Extreme Points: Finding Displacement and Bending Angle
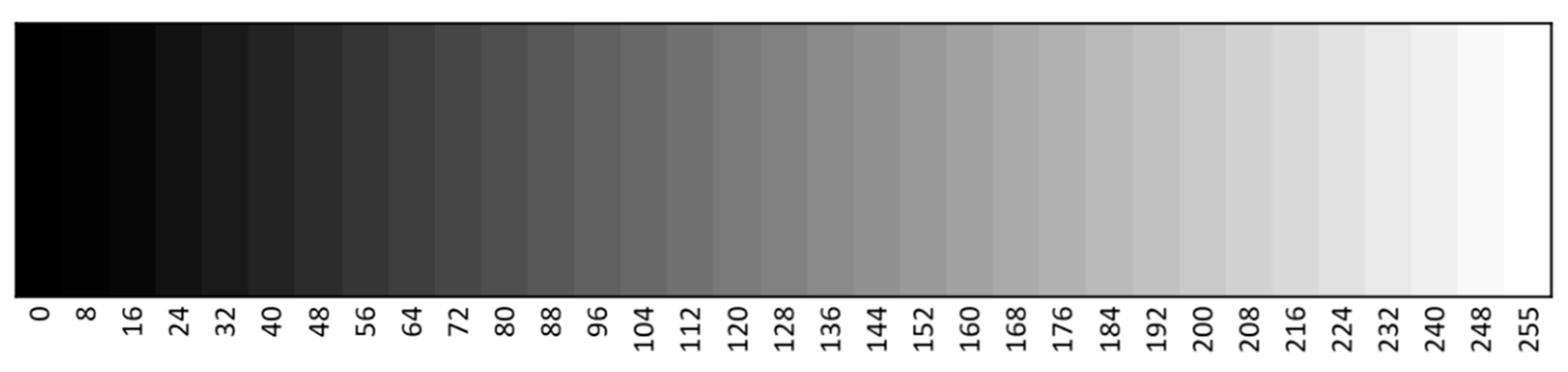
2.4. Converting Pixel Distance to Real-World Units
2.5. Lights, Camera and Actuation
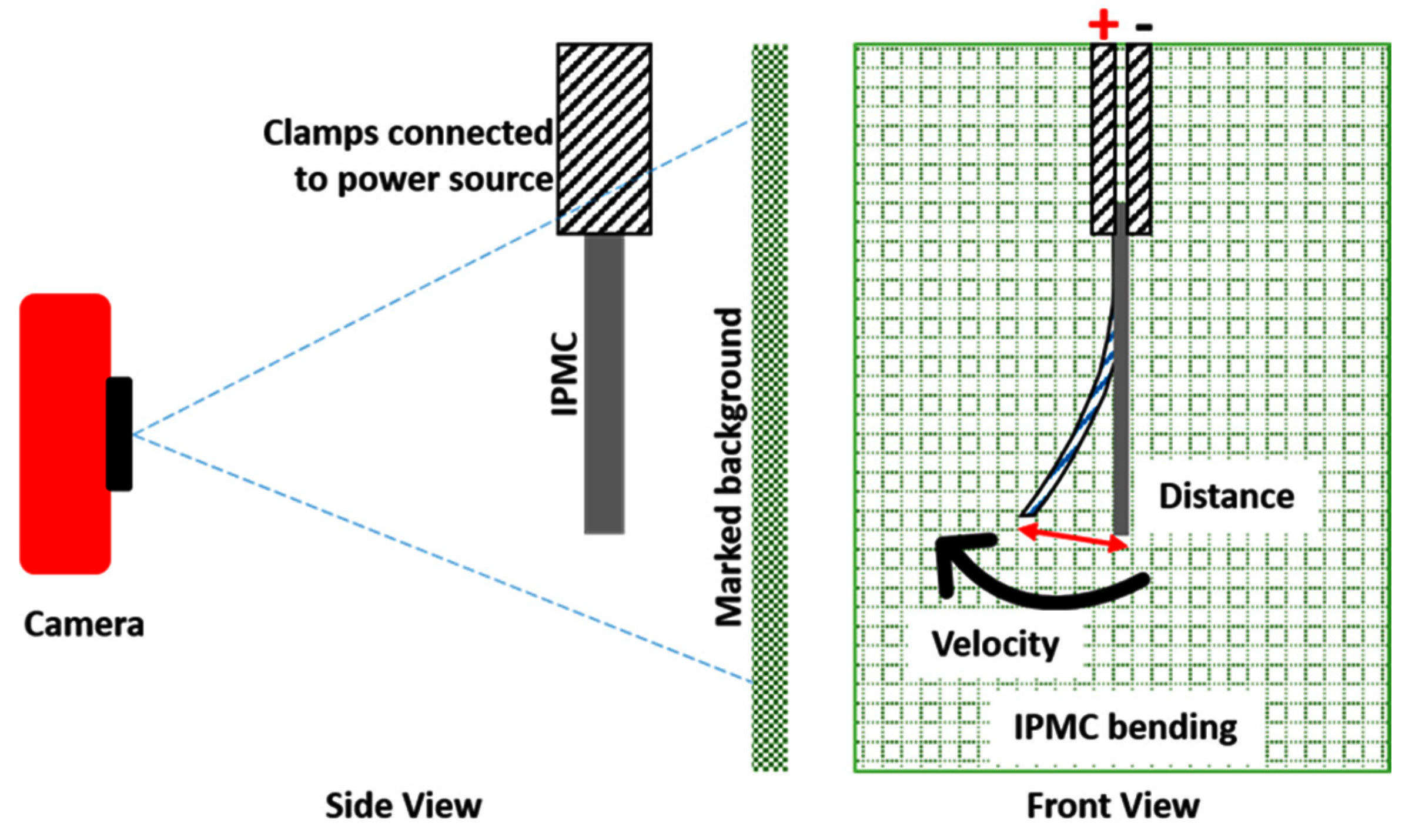
3. Experimental Setup
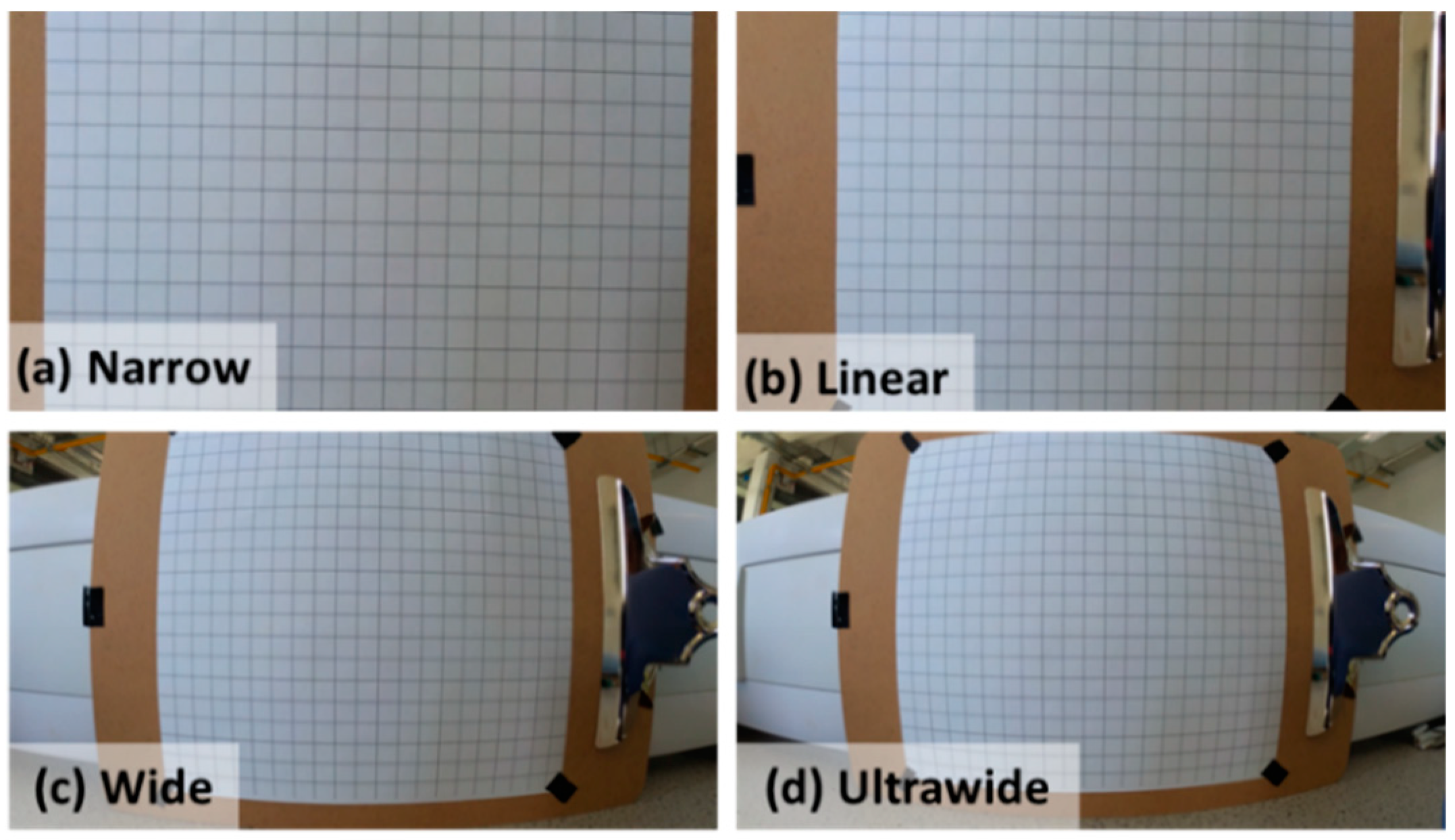
3.1. Camera & Lighting Setup
3.2. Sample Preparation
3.3. Clamping, Voltage and Frame Extraction
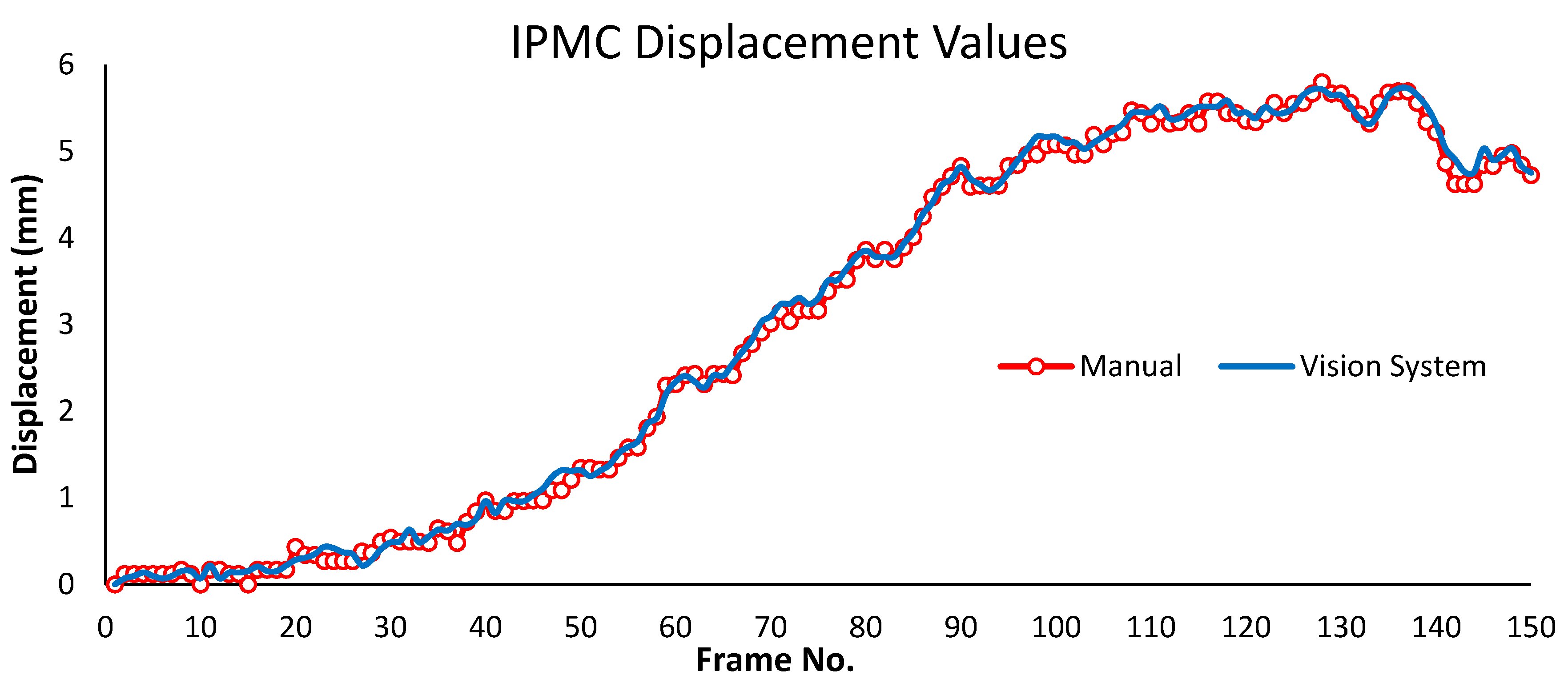
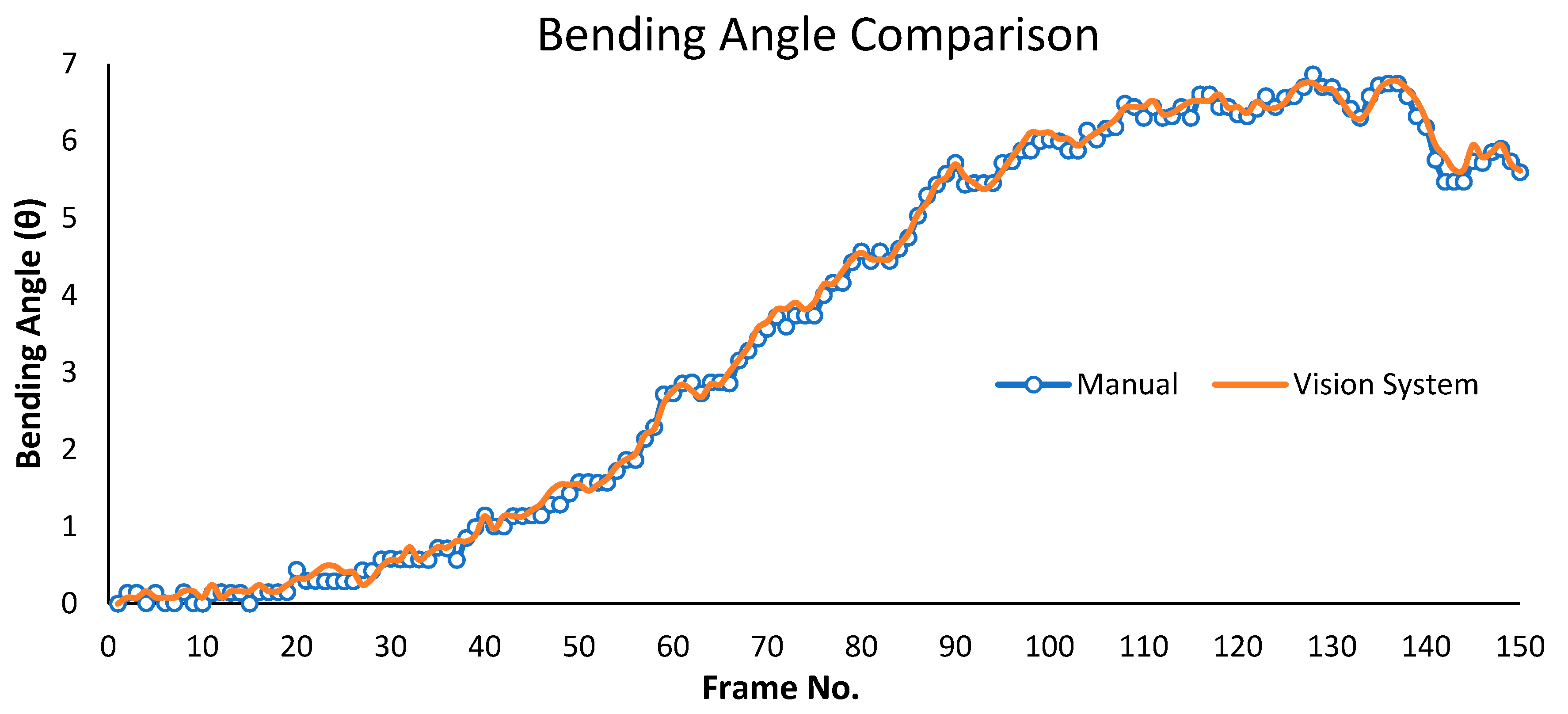
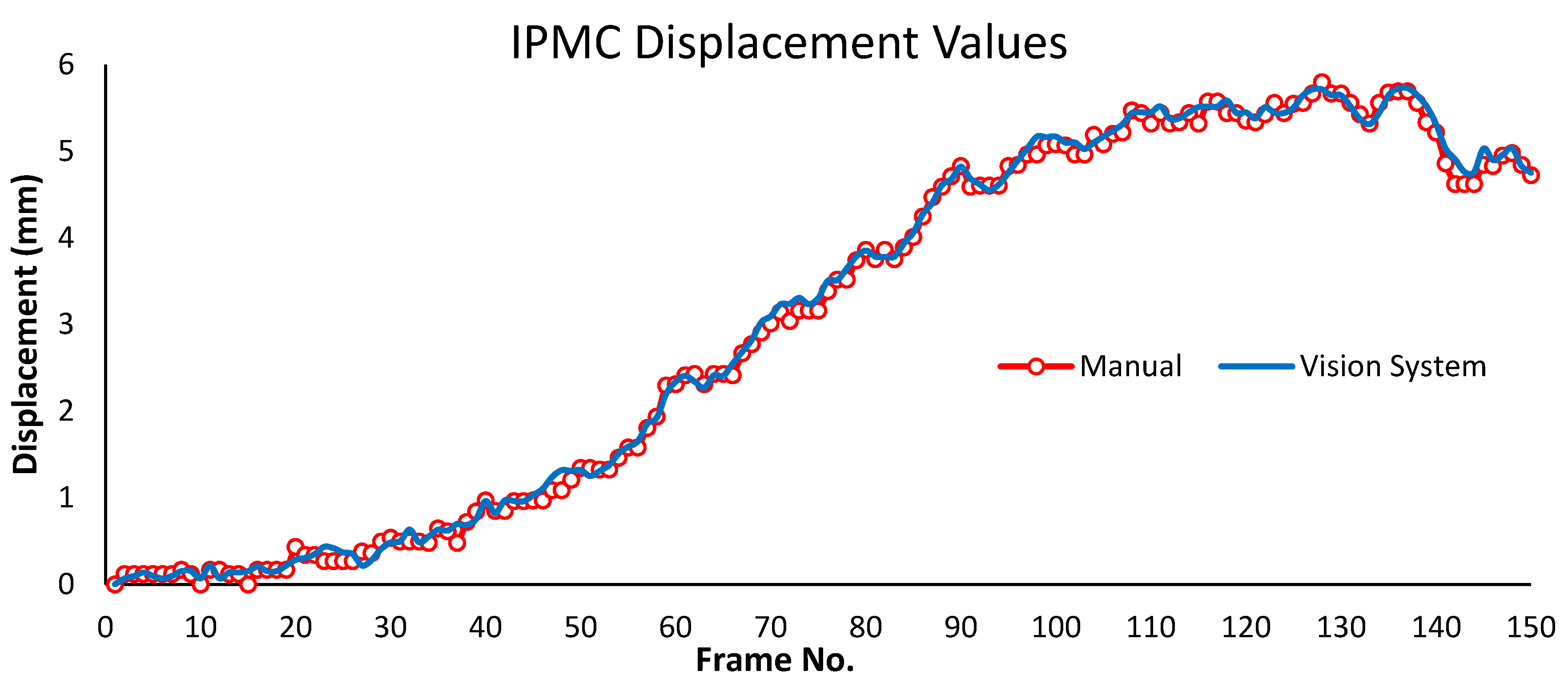
4. Results and Discussion
Limitations and Recommendations
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bar-Cohen, Y.; Cardoso, V.F.; Ribeiro, C.; Lanceros-Méndez, S. Chapter 8—Electroactive Polymers as Actuators. In Advanced Piezoelectric Materials, 2nd ed.; Uchino, K., Ed.; Woodhead Publishing: Sawston, UK, 2017; pp. 319–352. [Google Scholar] [CrossRef]
- He, C.; Gu, Y.; Zhang, J.; Ma, L.; Yan, M.; Mou, J.; Ren, Y. Preparation and Modification Technology Analysis of Ionic Polymer-Metal Composites (IPMCs). Int. J. Mol. Sci. 2022, 23, 3522. [Google Scholar] [CrossRef] [PubMed]
- He, Q.; Yin, G.; Vokoun, D.; Shen, Q.; Lu, J.; Liu, X.; Xu, X.; Yu, M.; Dai, Z. Review on Improvement, Modeling, and Application of Ionic Polymer Metal Composite Artificial Muscle. J. Bionic Eng. 2022, 19, 279–298. [Google Scholar] [CrossRef]
- Luqman, M.; Shaikh, H.; Anis, A.; Al-Zahrani, S.M.; Hamidi, A. Platinum-coated silicotungstic acid-sulfonated polyvinyl alcohol-polyaniline based hybrid ionic polymer metal composite membrane for bending actuation applications. Sci. Rep. 2022, 12, 4467. [Google Scholar] [CrossRef]
- Yılmaz, O.C.; Sen, I.; Gurses, B.O.; Ozdemir, O.; Cetin, L.; Sarıkanat, M.; Seki, Y.; Sever, K.; Altinkaya, E. The effect of gold electrode thicknesses on electromechanical performance of Nafion-based Ionic Polymer Metal Composite actuators. Compos. Part B Eng. 2019, 165, 747–753. [Google Scholar] [CrossRef]
- Asaka, K.; Oguro, K.; Nishimura, Y.; Mizuhata, M.; Takenaka, H. Bending of Polyelectrolyte Membrane–Platinum Composites by Electric Stimuli I. Response Characteristics to Various Waveforms. Polym. J. 1995, 27, 436–440. [Google Scholar] [CrossRef] [Green Version]
- Asaka, K.; Oguro, K. Bending of polyelectrolyte membrane platinum composites by electric stimuli: Part II. Response kinetics. J. Electroanal. Chem. 2000, 480, 186–198. [Google Scholar] [CrossRef]
- Asaka, K.; Oguro, K. Bending of polyelectrolyte membrane-platinum composite by electric stimuli. III: Self-oscillation. Electrochim. Acta 2000, 45, 4517–4523. [Google Scholar] [CrossRef]
- Tripathi, A.; Chattopadhyay, B.; Das, S. Actuation behavior of ionic polymer-metal composite based actuator in blood analogue fluid environment. Polym.-Plast. Technol. Mater. 2020, 59, 1268–1276. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, D.; Zhang, X.; Tian, A.; Ding, Y. “Surface roughening of Nafion membranes using different route planning for IPMCs. Int. J. Smart Nano Mater. 2020, 11, 117–128. [Google Scholar] [CrossRef]
- Tsiakmakis, K.; Brufau, J.; Puig-Vidal, M.; Laopoulos, T. Measuring Motion Parameters of Ionic Polymer-Metal Composites (IPMC) Actuators with a CCD Camera. In Proceedings of the 2007 IEEE Instrumentation Measurement Technology Conference IMTC, Warsaw, Poland, 1–3 May 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Tsiakmakis, K.; Brufau-Penella, J.; Puig-Vidal, M.; Laopoulos, T. A Camera Based Method for the Measurement of Motion Parameters of IPMC Actuators. IEEE Trans. Instrum. Meas. 2009, 58, 2626–2633. [Google Scholar] [CrossRef]
- Bar-Cohen, Y.; Bao, X.; Sherrit, S.; Lih, S.-S. Characterization of the Electromechanical Properties of Ionomeric Polymer-Metal Composite (IPMC). Proc. SPIE—Int. Soc. Opt. Eng. 2002, 4695, 286–293. [Google Scholar] [CrossRef]
- Bar-Cohen, Y.; Sherrit, S. Characterization of the Electromechanical Properties of EAP materials. Proc. SPIE—Int. Soc. Opt. Eng. 2001, 4329, 319–327. [Google Scholar] [CrossRef] [Green Version]
- Li, S.; Yip, J. Characterization and Actuation of Ionic Polymer Metal Composites with Various Thicknesses and Lengths. Polymers 2019, 11, 91. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nemat-Nasser, S.; Wu, Y. Comparative experimental study of ionic polymer–metal composites with different backbone ionomers and in various cation forms. J. Appl. Phys. 2003, 93, 5255. [Google Scholar] [CrossRef] [Green Version]
- Ma, S.; Zhang, Y.; Liang, Y.; Ren, L.; Tian, W.; Ren, L. High-Performance Ionic-Polymer–Metal Composite: Toward Large-Deformation Fast-Response Artificial Muscles. Adv. Funct. Mater. 2020, 30, 1908508. [Google Scholar] [CrossRef]
- Pulli, K.; Baksheev, A.; Kornyakov, K.; Eruhimov, V. Realtime Computer Vision with OpenCV: Mobile computer-vision technology will soon become as ubiquitous as touch interfaces. Queue 2012, 10, 40–56. [Google Scholar] [CrossRef]
- Brownlee, J. Deep Learning for Computer Vision: Image Classification, Object Detection, and Face Recognition in Python; Machine Learning Mastery: San Juan, Puerto Rico, 2019. [Google Scholar]
- Rosebrock, A. OpenCV Thresholding (cv2.threshold). PyImageSearch. 2021. Available online: https://www.pyimagesearch.com/2021/04/28/opencv-thresholding-cv2-threshold/ (accessed on 4 May 2022).
- Blackledge, J.M. Digital Image Processing: Mathematical and Computational Methods; Woodhead Publishing: Oxford, UK, 2005. [Google Scholar]
- Joram, N. Converting RGB image to the Grayscale image in Java. Javarevisited. 2021. Available online: https://medium.com/javarevisited/converting-rgb-image-to-the-grayscale-image-in-java-9e1edc5bd6e7 (accessed on 8 April 2022).
- Kimball, S.; Mattis, P. GIMP. 2021. Available online: https://www.gimp.org/ (accessed on 11 April 2022).
- Chakraborty, D. OpenCV Contour Approximation. PyImageSearch. 2021. Available online: https://www.pyimagesearch.com/2021/10/06/opencv-contour-approximation/ (accessed on 6 May 2022).
- Teh, C.-H.; Chin, R.T. On the detection of dominant points on digital curves. IEEE Trans. Pattern Anal. Mach. Intell. 1989, 11, 859–872. [Google Scholar] [CrossRef] [Green Version]
- Mallick, S. Contour Detection using OpenCV (Python/C++). LearnOpenCV. 2021. Available online: https://learnopencv.com/contour-detection-using-opencv-python-c/ (accessed on 12 April 2022).
- Rosebrock, A. OpenCV Getting and Setting Pixels. PyImageSearch. 2021. Available online: https://www.pyimagesearch.com/2021/01/20/opencv-getting-and-setting-pixels/ (accessed on 3 May 2022).
- Rosebrock, A. Finding extreme points in contours with OpenCV. PyImageSearch. 2016. Available online: https://www.pyimagesearch.com/2016/04/11/finding-extreme-points-in-contours-with-opencv/ (accessed on 5 May 2022).
- Weisman, D. Triangle with Notations for Sides and Angles. 2006. Available online: https://commons.wikimedia.org/wiki/File:Triangle_with_notations_2.svg (accessed on 13 April 2022).
- Catoy, K. The Basics of Video Resolution. Video4Change. 2020. Available online: https://video4change.org/the-basics-of-video-resolution/ (accessed on 4 May 2022).
- Surana, N. A Complete List of Video Resolutions and their Pixel Size. Typito. 2020. Available online: https://typito.com/blog/video-resolutions/ (accessed on 6 May 2022).
- Kurniawan, M.; Hara, H. A Beginner’s guide to frame rates in films | Adobe. Adobe. 2020. Available online: https://www.adobe.com/ie/creativecloud/video/discover/frame-rate.html (accessed on 17 May 2022).
- Mansurov, N. Understanding Shutter Speed for Beginners—Photography Basics. Photography Life. 2018. Available online: https://photographylife.com/what-is-shutter-speed-in-photography (accessed on 4 May 2022).
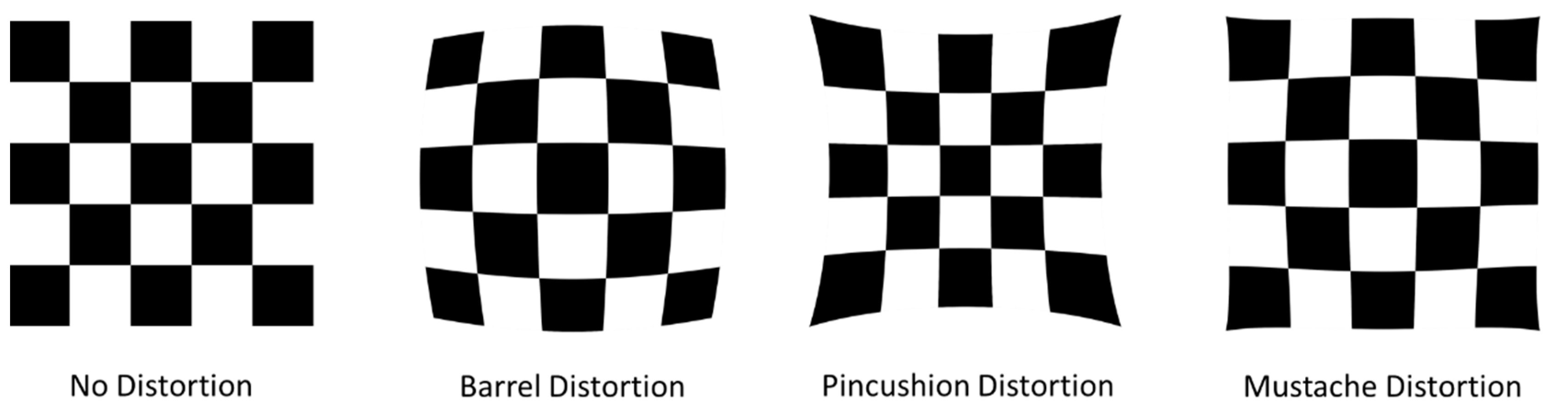
- Gray, D. Distortion 101—Lens vs. Perspective. Drew Gray Photography—Interior/Architectural/Landscaping. 2014. Available online: http://www.drewgrayphoto.com/learn/distortion101 (accessed on 25 February 2022).
- Kim, K.J.; Shahinpoor, M. Ionic polymer metal composites: II. Manufacturing techniques. Smart Mater. Struct. 2003, 12, 65–79. [Google Scholar] [CrossRef]
- Yang, L.; Zhang, D.; Wang, H.; Zhang, X. Actuation Modeling of Ionic–Polymer Metal Composite Actuators Using Micromechanics Approach. Adv. Eng. Mater. 2020, 22, 2000537. [Google Scholar] [CrossRef]
- Rosebrock, A. Sorting Contours using Python and OpenCV. PyImageSearch. 2015. Available online: https://www.pyimagesearch.com/2015/04/20/sorting-contours-using-python-and-opencv/ (accessed on 4 May 2022).
- Sadekar, K.; Mallick, S. Camera Calibration using OpenCV | LearnOpenCV #. LearnOpenCV. 2020. Available online: https://learnopencv.com/camera-calibration-using-opencv/ (accessed on 17 May 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Enumerator | Mathematical Notation |
|---|---|
| THRESH_BINARY | |
| THRESH_BINARY_INV |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Manaf, E.; Fitzgerald, K.; Higginbotham, C.L.; Lyons, J.G. Computer Vision System: Measuring Displacement and Bending Angle of Ionic Polymer-Metal Composites. Appl. Sci. 2022, 12, 6744. https://doi.org/10.3390/app12136744
Manaf E, Fitzgerald K, Higginbotham CL, Lyons JG. Computer Vision System: Measuring Displacement and Bending Angle of Ionic Polymer-Metal Composites. Applied Sciences. 2022; 12(13):6744. https://doi.org/10.3390/app12136744
Chicago/Turabian StyleManaf, Eyman, Karol Fitzgerald, Clement L. Higginbotham, and John G. Lyons. 2022. "Computer Vision System: Measuring Displacement and Bending Angle of Ionic Polymer-Metal Composites" Applied Sciences 12, no. 13: 6744. https://doi.org/10.3390/app12136744
APA StyleManaf, E., Fitzgerald, K., Higginbotham, C. L., & Lyons, J. G. (2022). Computer Vision System: Measuring Displacement and Bending Angle of Ionic Polymer-Metal Composites. Applied Sciences, 12(13), 6744. https://doi.org/10.3390/app12136744