
Use of Surface Acoustic Waves for Crack Detection on Railway Track Components—Laboratory Tests


Abstract
:1. Introduction
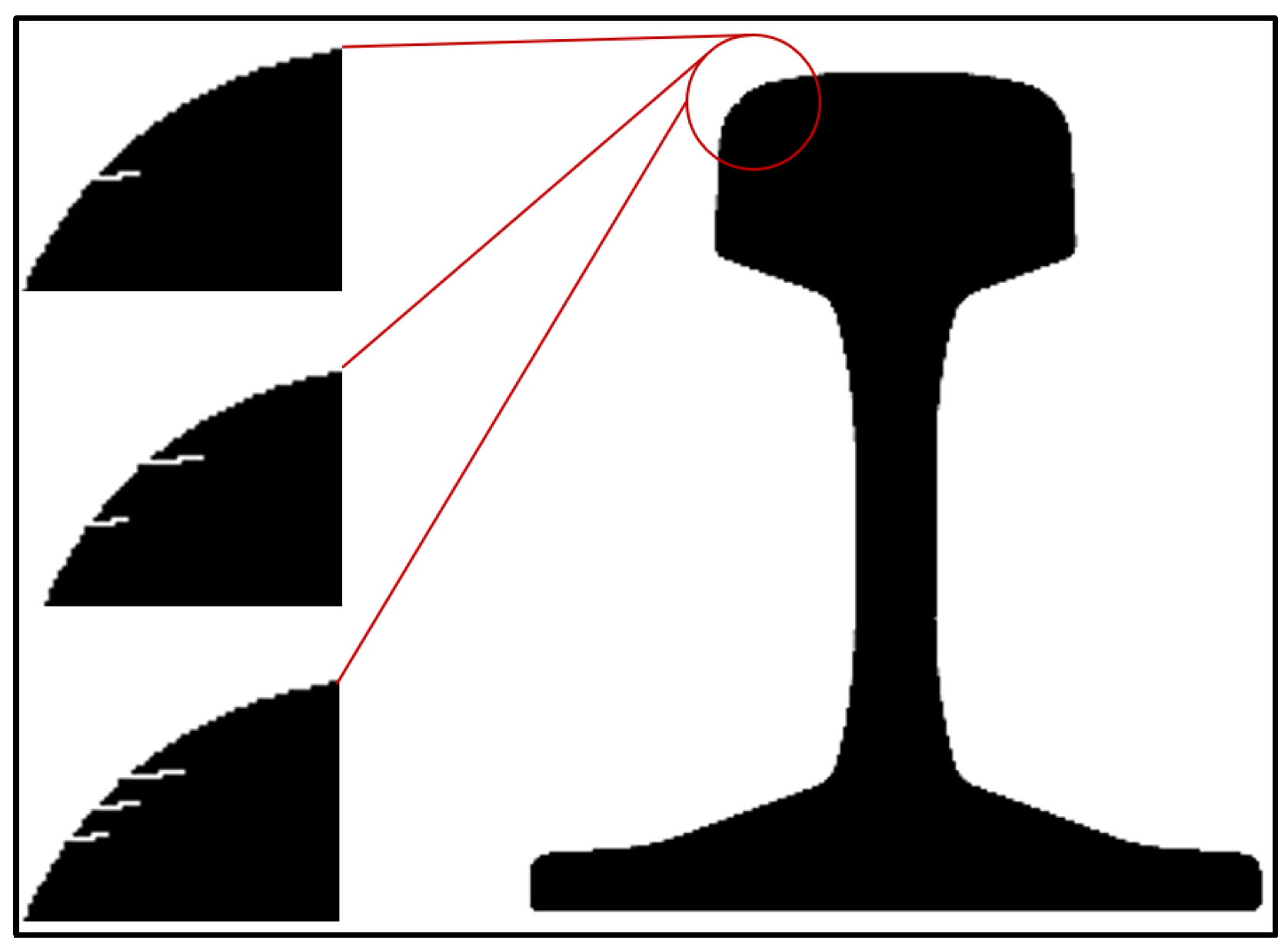
1.1. Head Checks—A Specific Type of Rail Damage
1.2. Current Technical Solutions for Condition Monitoring of Railway Tracks
1.3. Surface Acoustic Waves for Crack Detection
2. Test Specimen and Methods
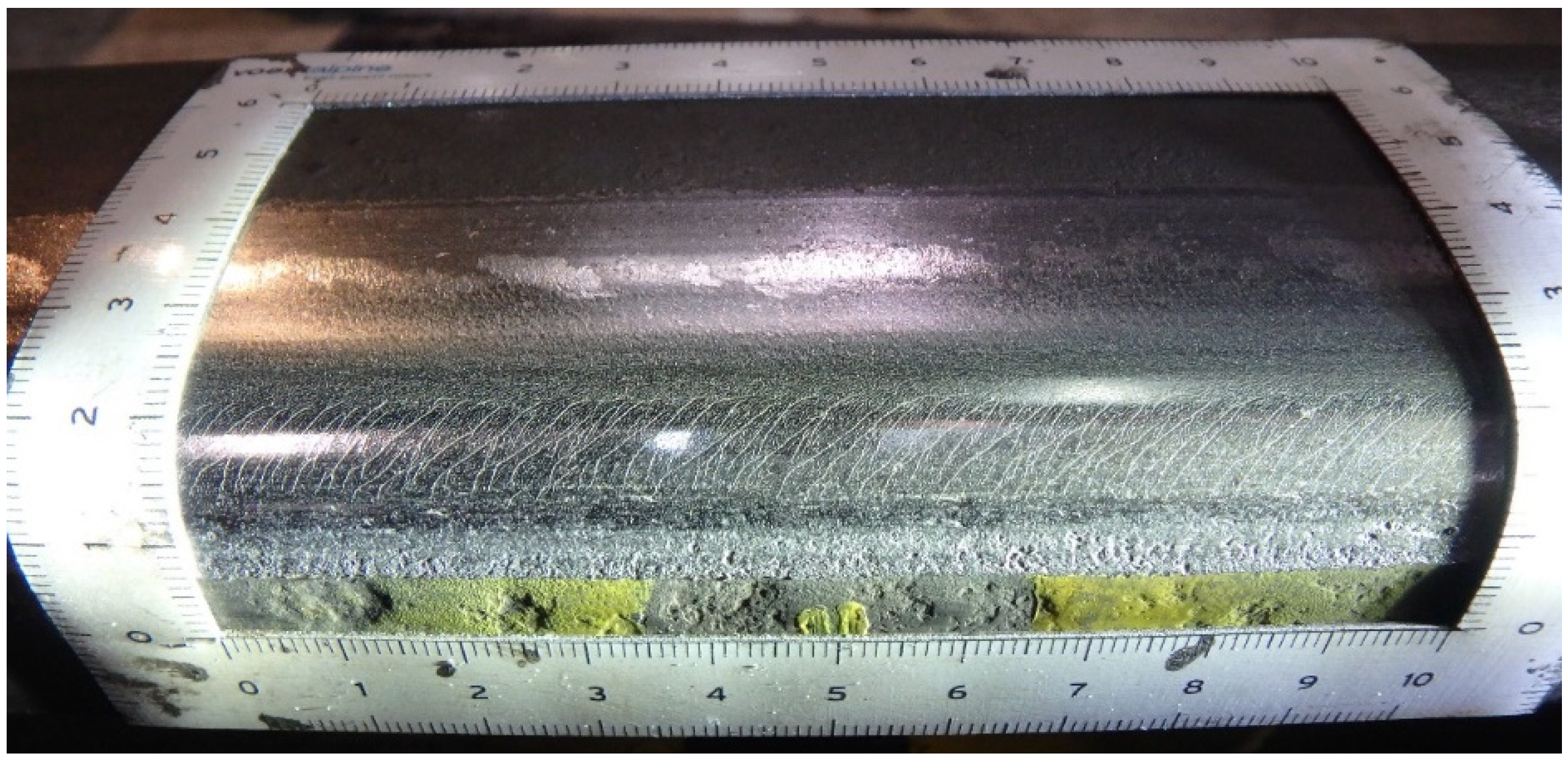
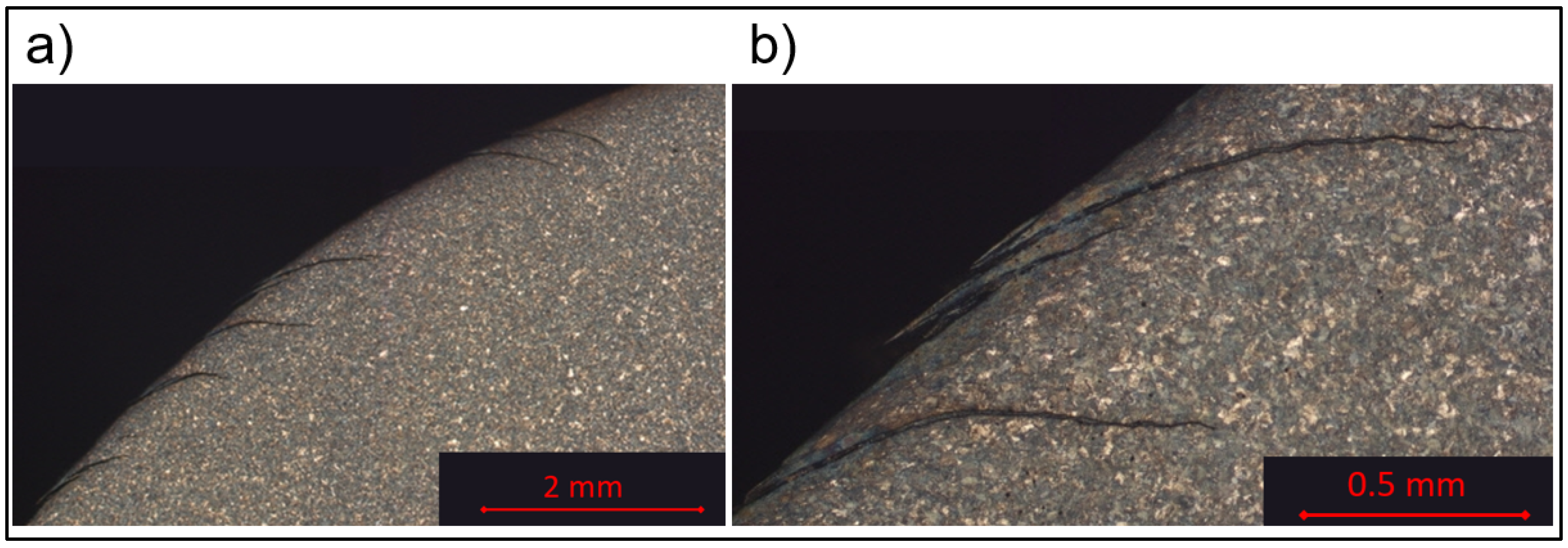
2.1. Generation of Head Checks in a 1:1 Wheel–Rail Test Setup
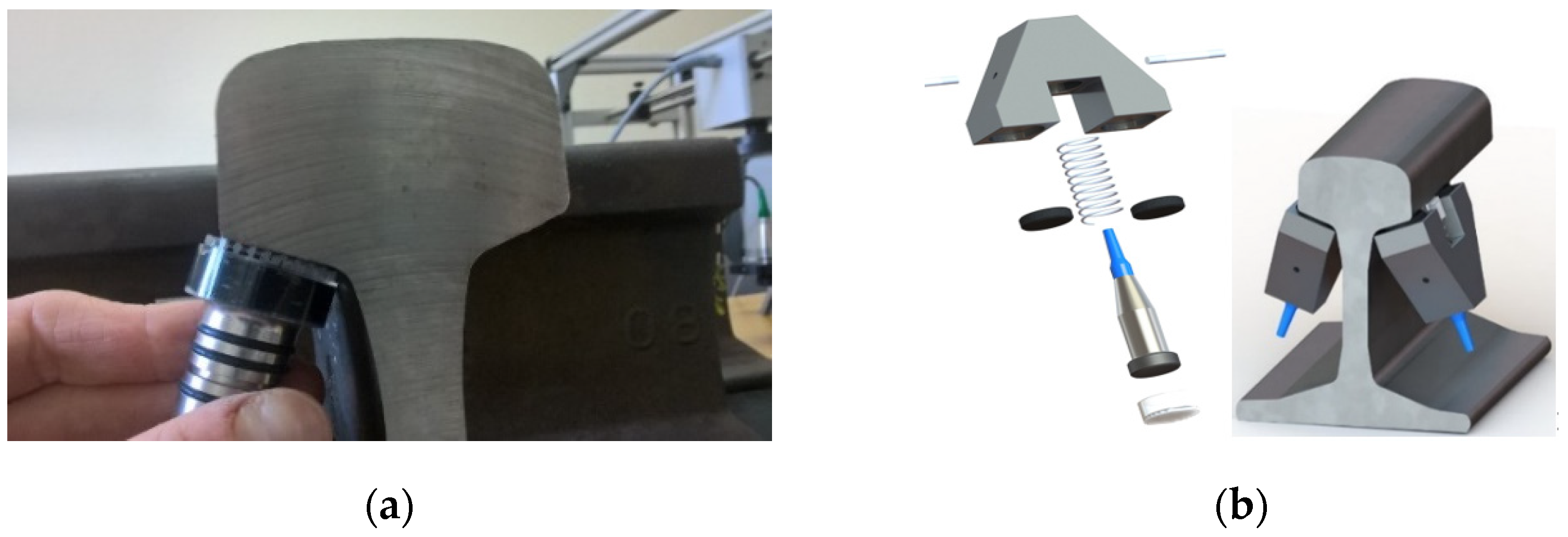
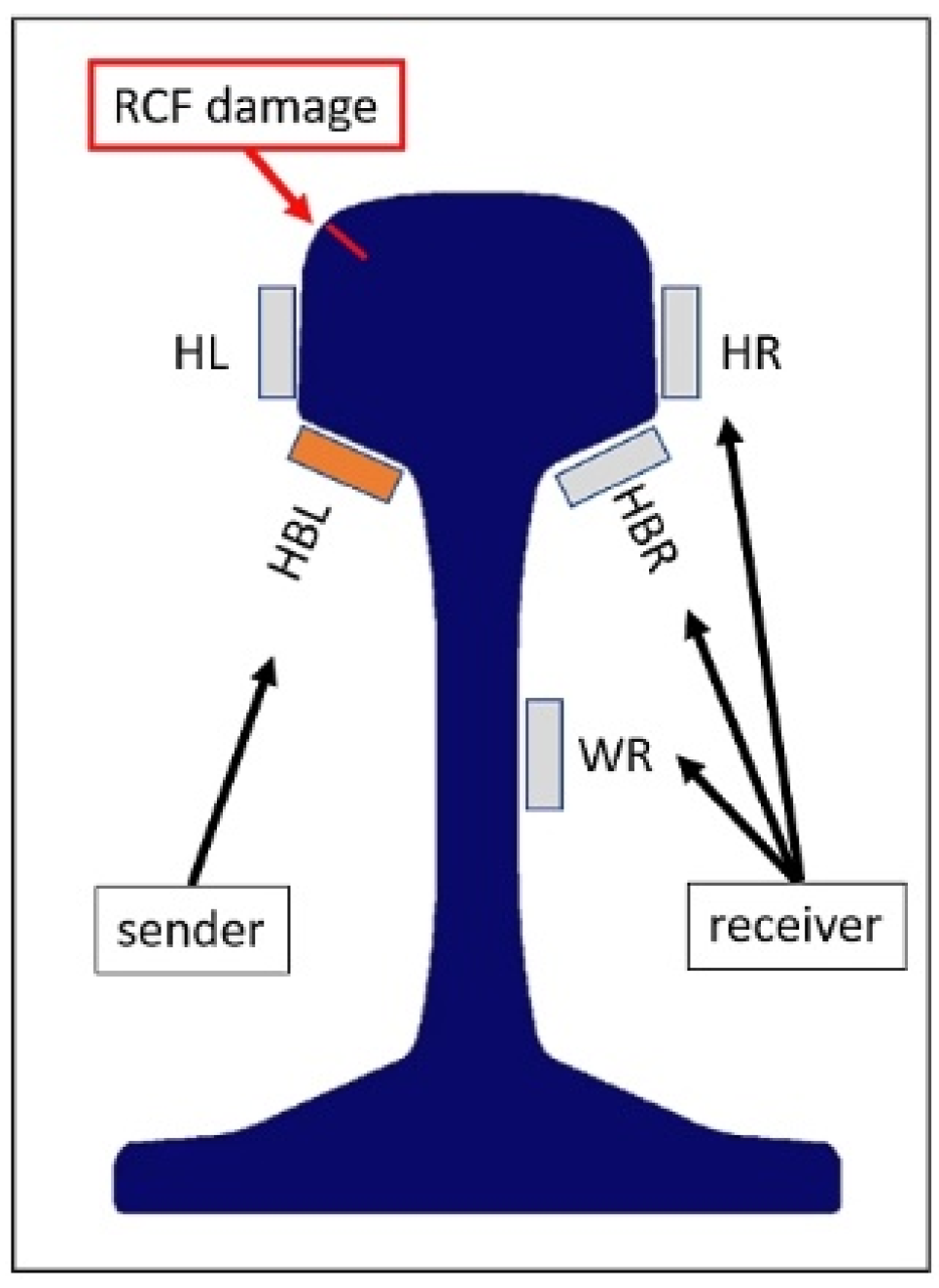
2.2. Pitch-Catch Setup for the Excitation and Measurement of Quasi-Rayleigh Waves with Contacting Transducers
2.3. Scattering of Rayleigh Waves at Surface Breaking Cracks—Theoretical Considerations
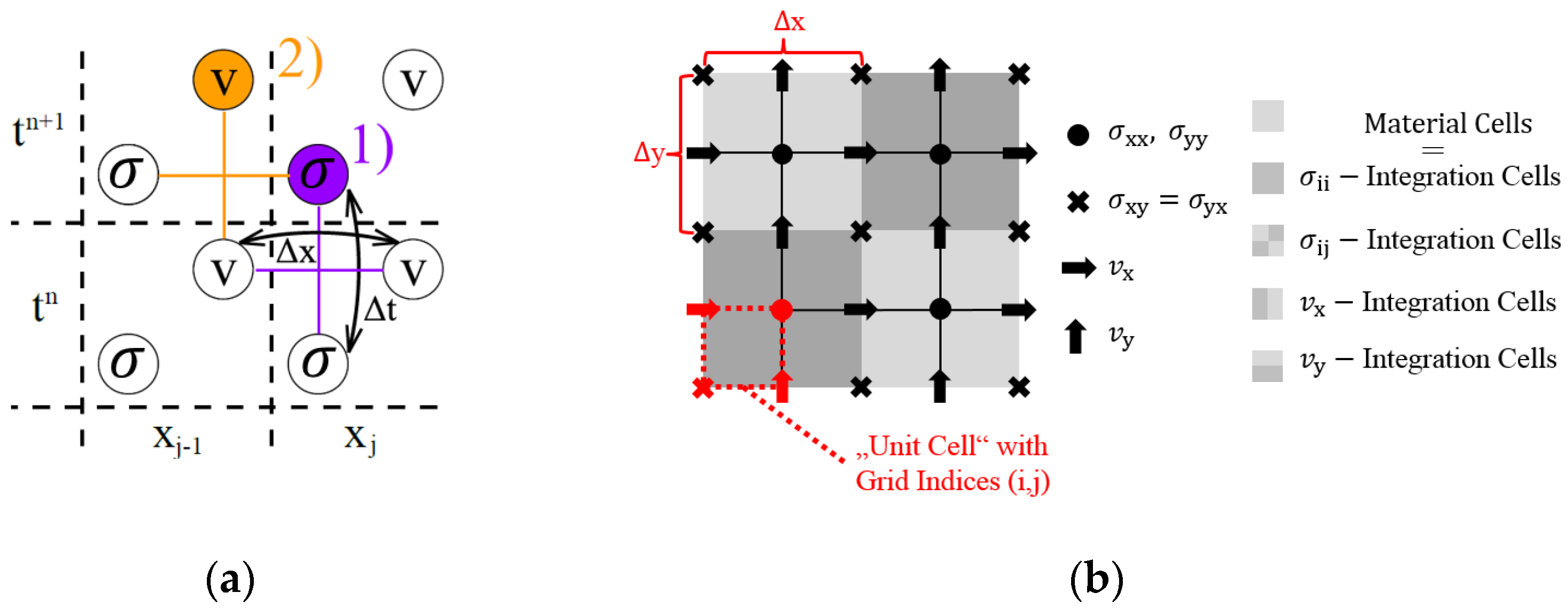
2.4. Simulation of Elastic Wave Propagation via EFIT
3. Results
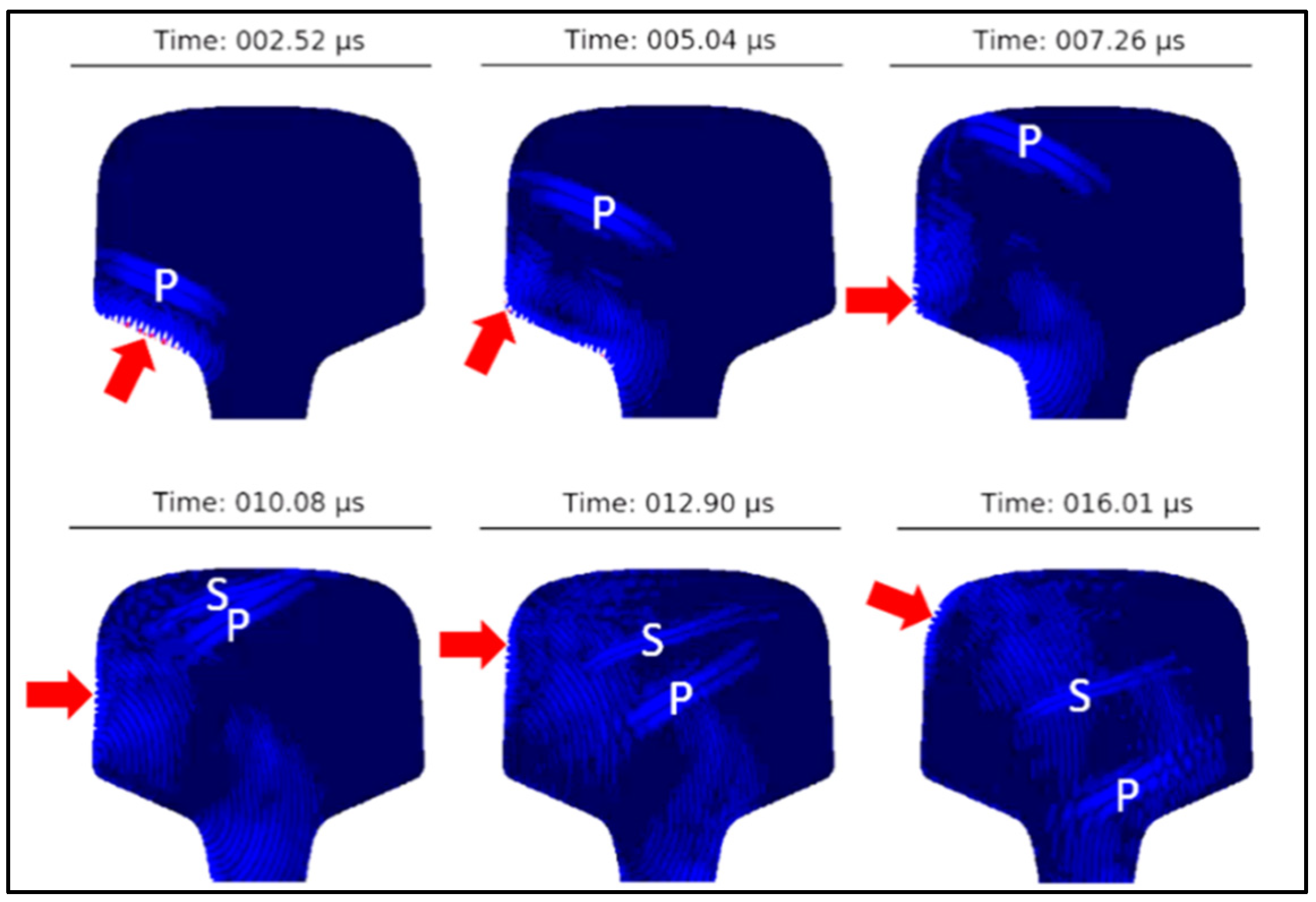
3.1. EFIT Visualization of Surface Wave Propagation in a Rail
3.2. EFIT Calculation of the Wave Signals Received at Specific Cirumferential Points of the Rail–Wave Reflection
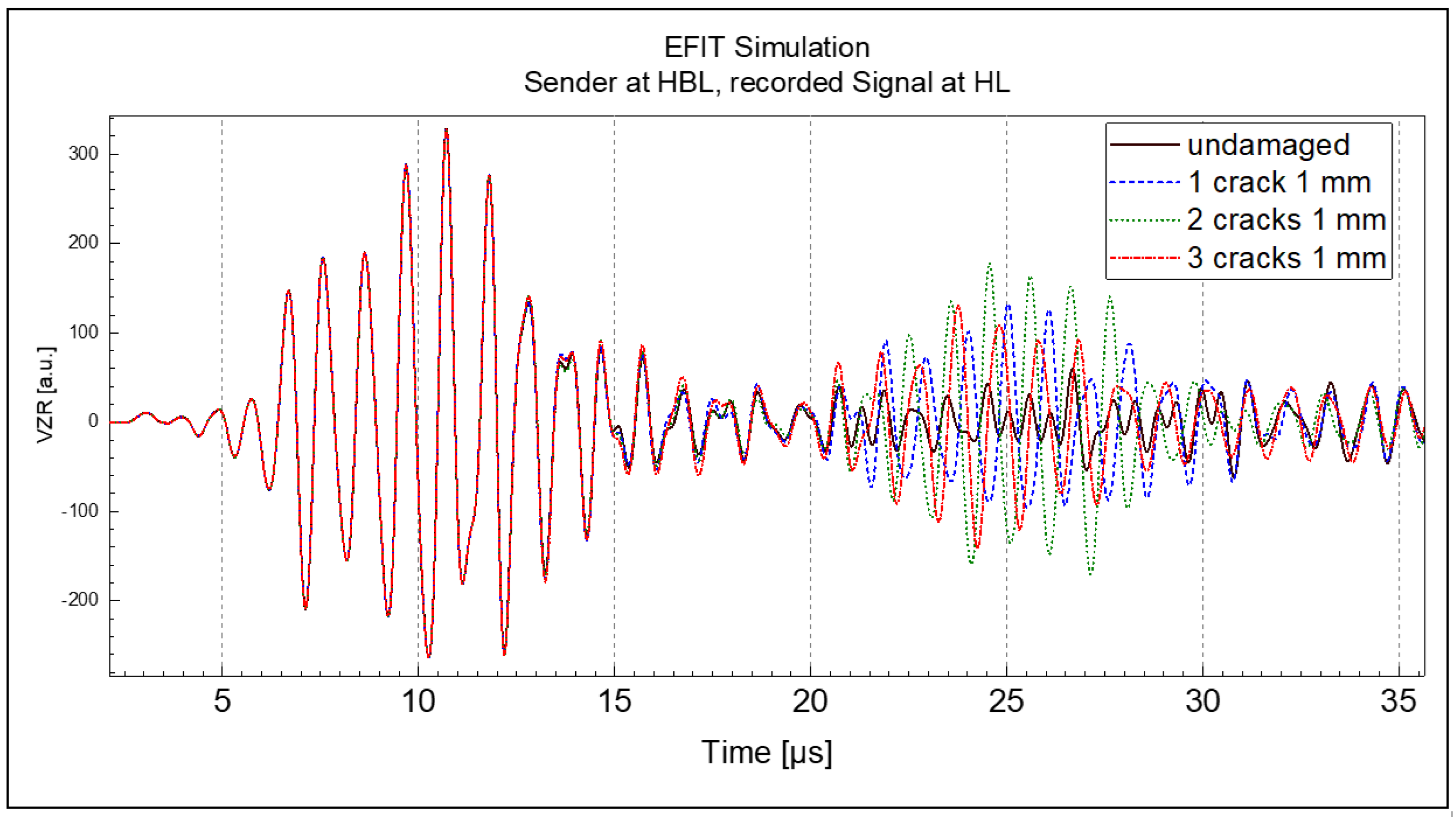
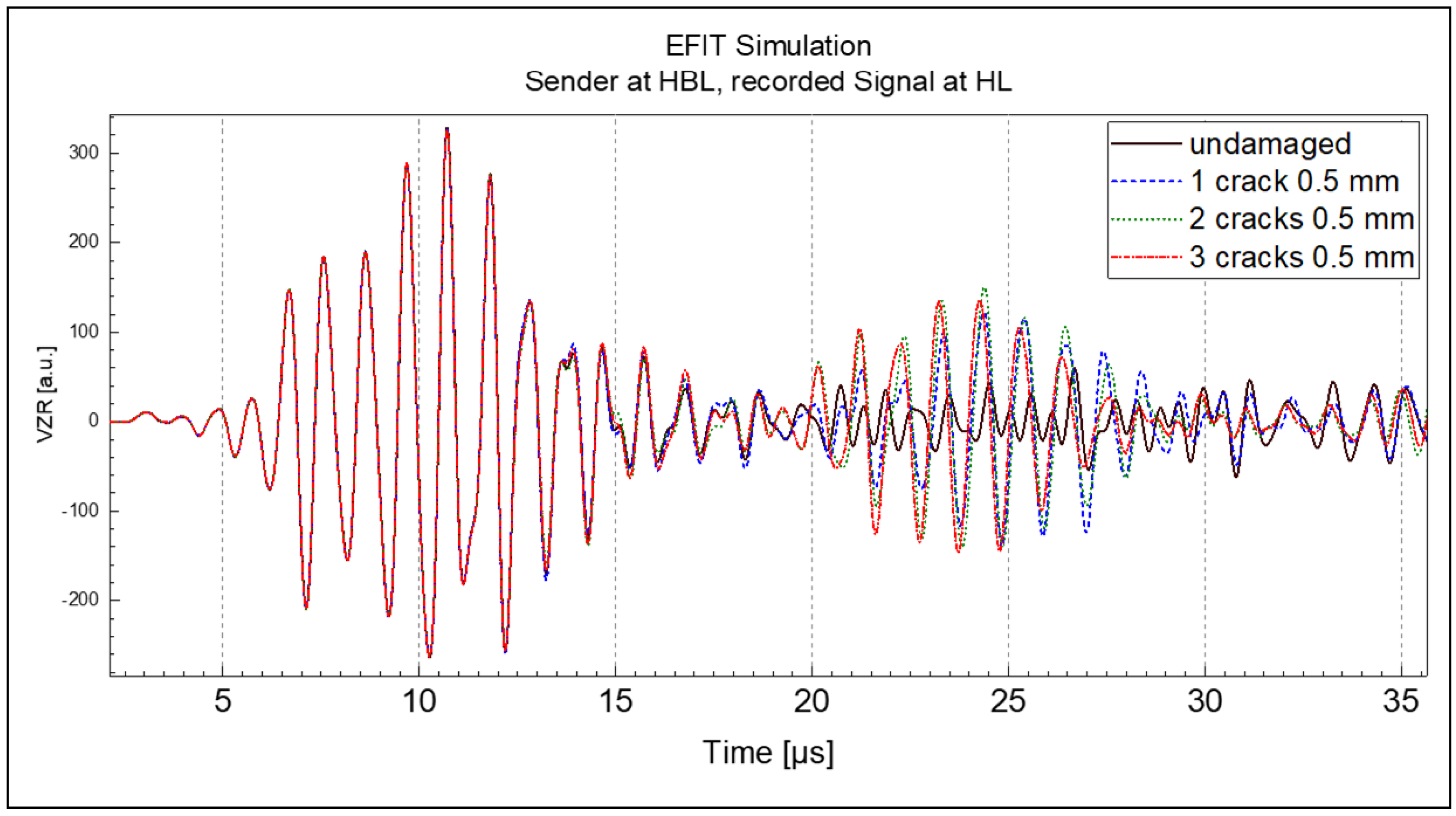
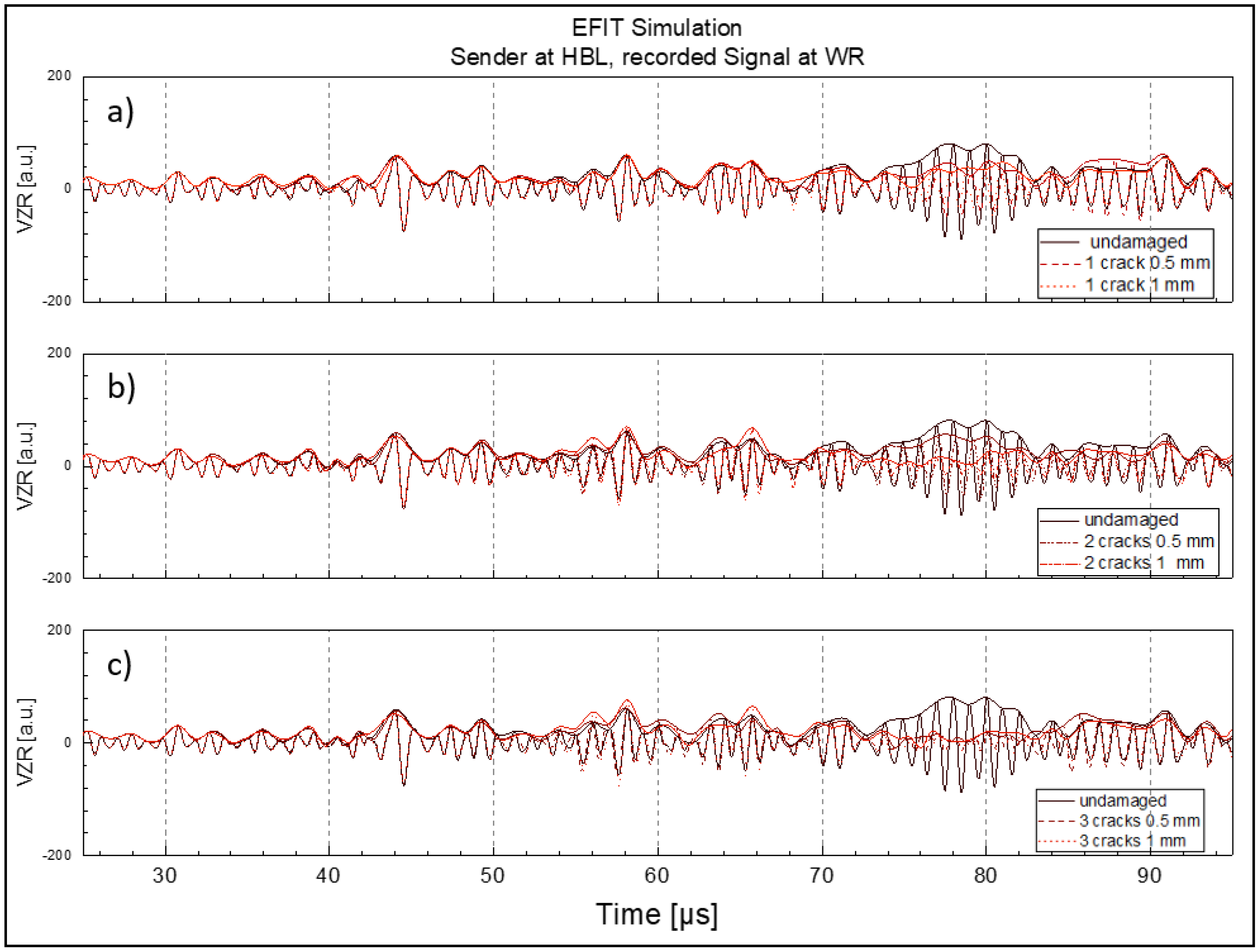
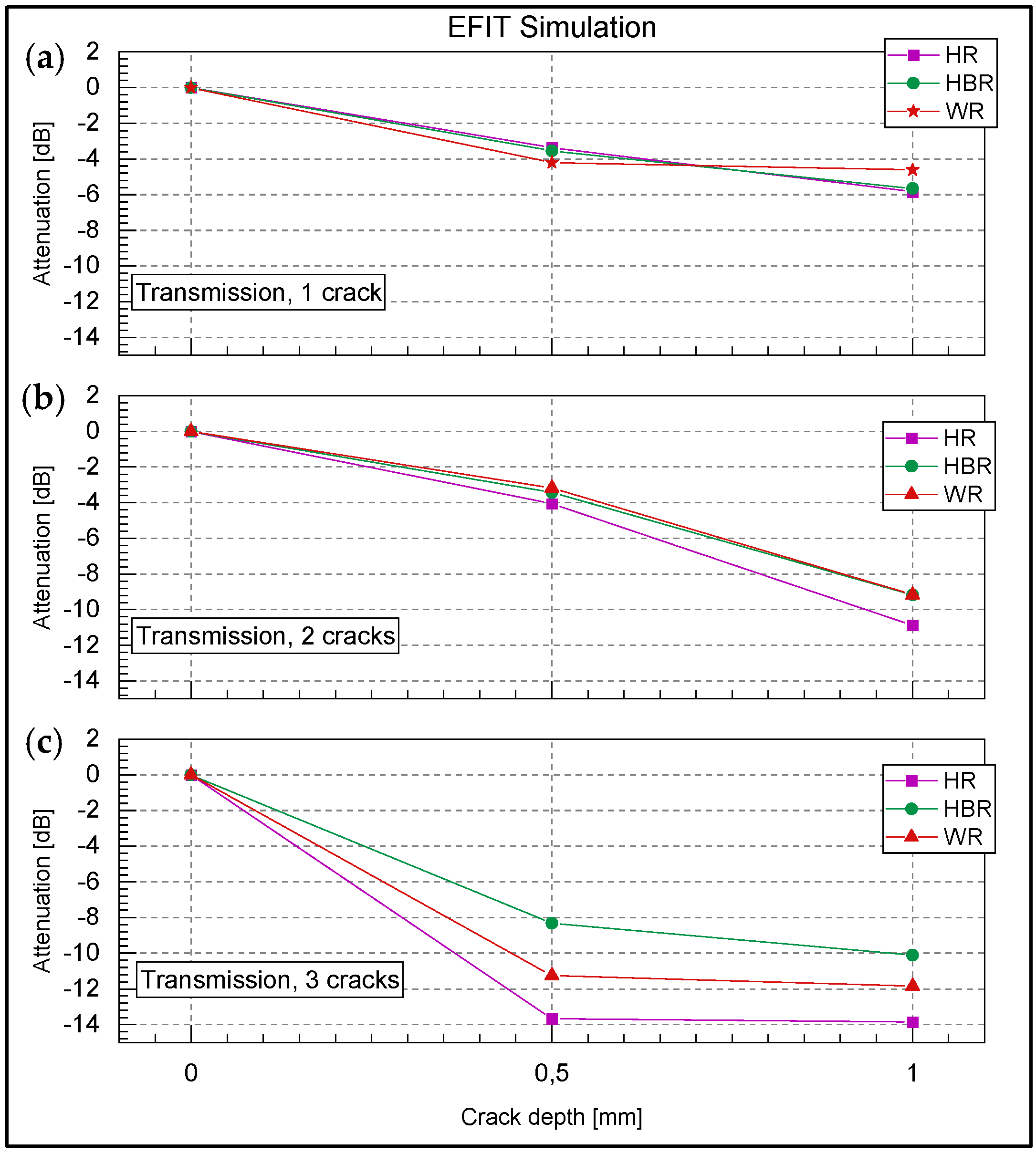
3.3. EFIT Calculation of the Wave Signals Received at Specific Cirumferential Points of the Rail–Wave Transmission
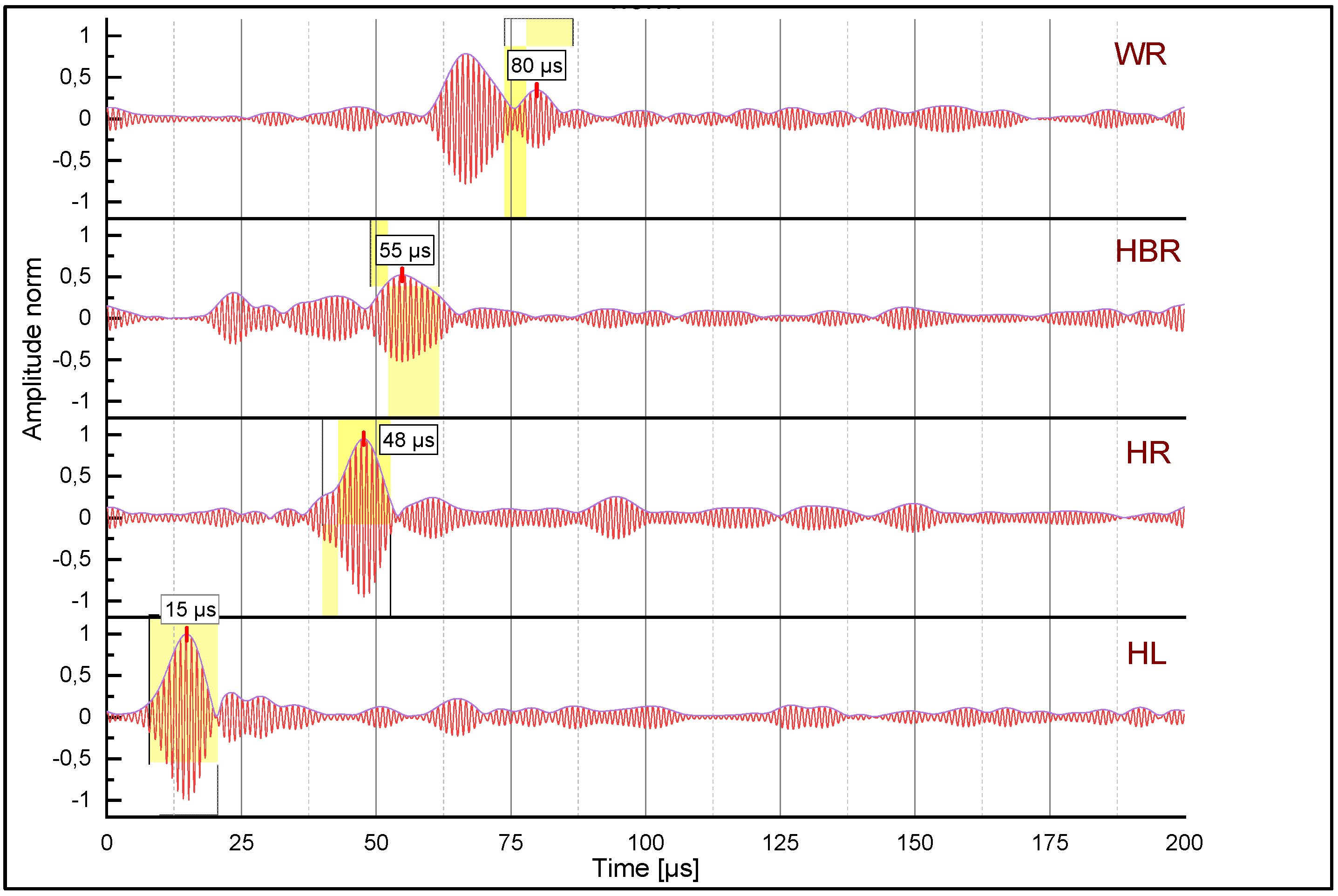
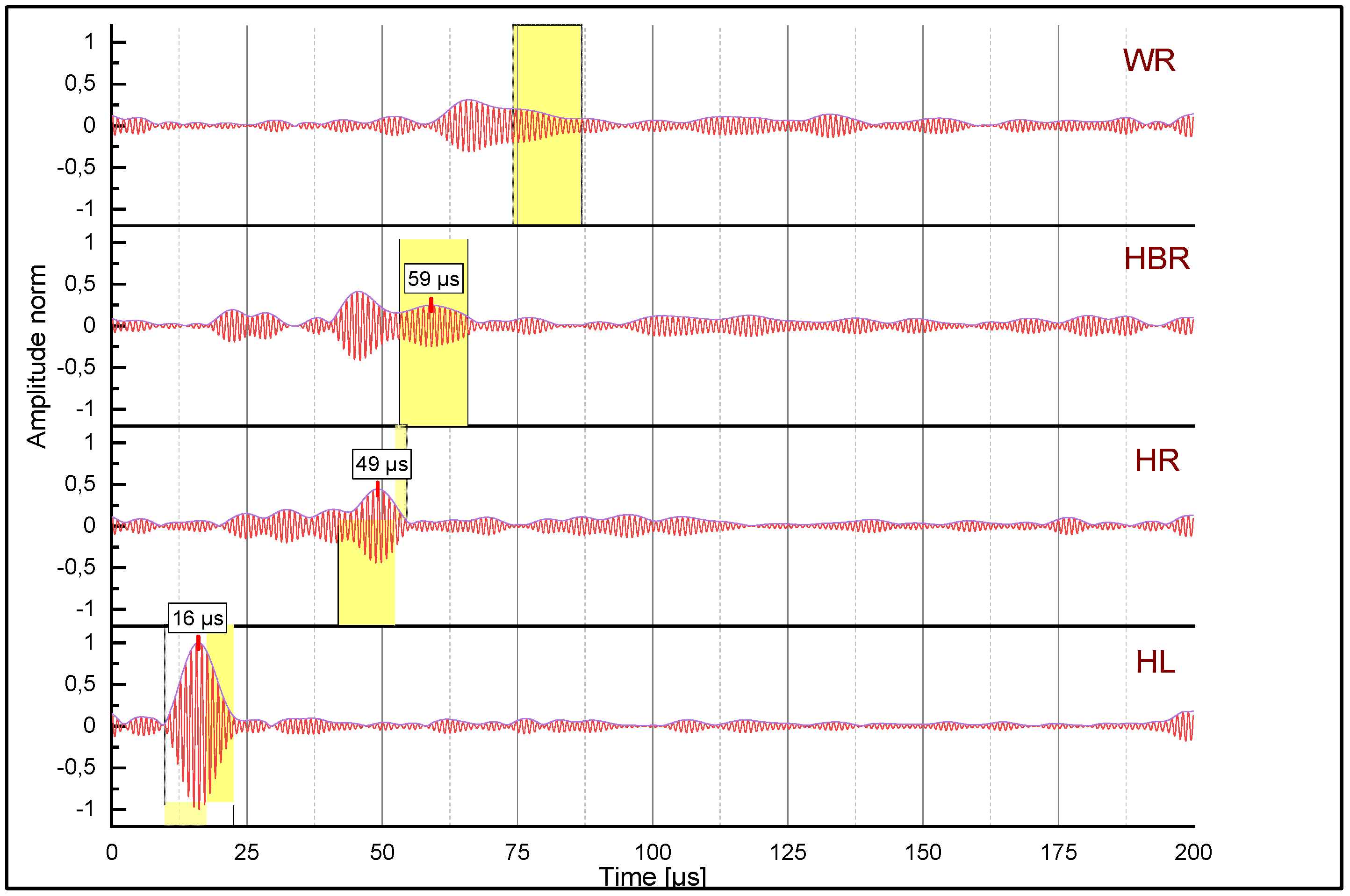
3.4. Measured Wave Signals Recorded at Specific Cirumferential Points of the Rail–Wave Transmission
4. Discussion
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Eadie, D.; Elvidge, D.; Oldknow, K.; Stock, R.; Pointner, P.; Kalousek, J.; Klauser, P. The effects of top of rail friction modifier on wear and rolling contact fatigue: Full-scale rail–wheel test rig evaluation, analysis and modelling. Wear 2008, 265, 1222–1230. [Google Scholar] [CrossRef]
- Kostrzewski, M.; Melnik, R. Condition Monitoring of Rail Transport Systems: A Bibliometric Performance Analysis and Systematic Literature Review. Sensors 2021, 21, 4710. [Google Scholar] [CrossRef] [PubMed]
- Chen, K.; Fu, X.; Dorantes-Gonzalez, D.J.; Li, Y.; Wu, S.; Hu, X. Laser-Generated Surface Acoustic Wave Technique for Crack Monitoring—A Review. Int. J. Autom. Technol. 2013, 7, 211–220. [Google Scholar] [CrossRef]
- Masserey, B.; Raemy, C.; Fromme, P. High-frequency guided ultrasonic waves for hidden defect detection in multi-layered aircraft structures. Ultrasonics 2014, 54, 1720–1728. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Thompson, R.-B. Physical Principles of Measurements with EMAT Transducers. Phys. Acoust. 1990, 19, 157–200. [Google Scholar] [CrossRef]
- Hribšek, M.F.; Tosic, D.V.; Radosavljević, M.R. Surface Acoustic Wave Sensors in Mechanical Engineering. FME Trans. 2010, 38, 11–18. Available online: https://www.mas.bg.ac.rs/_media/istrazivanje/fme/vol38/1/02_mfhribsek.pdf (accessed on 1 February 2022).
- Masurkar, F.; Rostami, J.; Tse, P. Design of an innovative and self-adaptive-smart algorithm to investigate the structural integrity of a rail track using Rayleigh waves emitted and sensed by a fully non-contact laser transduction system. Appl. Acoust. 2020, 166, 107354. [Google Scholar] [CrossRef]
- Stock, R.; Pippan, R. Rail grade dependent damage behaviour—Characteristics and damage formation hypothesis. Wear 2014, 314, 44–50. [Google Scholar] [CrossRef]
- Ultraschall Echoskop GS200. Available online: https://www.gampt.de/en/product/ultraschall-echoskop-gs200 (accessed on 1 February 2022).
- Danicki, E.J. Scattering by periodic cracks and theory of comb transducers. Wave Motion 2002, 35, 355–370. [Google Scholar] [CrossRef]
- Angel, Y.C.; Achenbach, J.D. Reflection and transmission of obliquely incident Rayleigh waves by a surface-breaking crack. J. Acoust. Soc. Am. 1984, 75, 313. [Google Scholar] [CrossRef]
- Fellinger, P.; Marklein, R.; Langenberg, K.J.; Klaholz, S. Numerical modeling of elastic wave propagation and scattering with EFIT—Elastodynamic finite integration technique. Wave Motion 1995, 21, 47–66. [Google Scholar] [CrossRef]
- Hammer, R.; Mitterhuber, L.; Brunner, R. Phasor Wave-Field Simulation Providing Direct Access to Instantaneous Frequency: A Demonstration for a Damped Elastic Wave Simulation. Acoustics 2021, 3, 485–492. [Google Scholar] [CrossRef]
- TensorFlow. Available online: https://www.tensorflow.org/ (accessed on 8 June 2022).
- Edwards, R.S.; Dixon, S.; Jian, X. Depth gauging of defects using low frequency wideband Rayleigh waves. Ultrasonics 2006, 44, 93–98. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass Density | Young’s Modulus | Poisson’s Ratio |
| 7800 kg/m³ | 200 GPa | 0.29 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gruber, C.; Hammer, R.; Gänser, H.-P.; Künstner, D.; Eck, S. Use of Surface Acoustic Waves for Crack Detection on Railway Track Components—Laboratory Tests. Appl. Sci. 2022, 12, 6334. https://doi.org/10.3390/app12136334
Gruber C, Hammer R, Gänser H-P, Künstner D, Eck S. Use of Surface Acoustic Waves for Crack Detection on Railway Track Components—Laboratory Tests. Applied Sciences. 2022; 12(13):6334. https://doi.org/10.3390/app12136334
Chicago/Turabian StyleGruber, Claudia, René Hammer, Hans-Peter Gänser, David Künstner, and Sven Eck. 2022. "Use of Surface Acoustic Waves for Crack Detection on Railway Track Components—Laboratory Tests" Applied Sciences 12, no. 13: 6334. https://doi.org/10.3390/app12136334
APA StyleGruber, C., Hammer, R., Gänser, H.-P., Künstner, D., & Eck, S. (2022). Use of Surface Acoustic Waves for Crack Detection on Railway Track Components—Laboratory Tests. Applied Sciences, 12(13), 6334. https://doi.org/10.3390/app12136334