1. Introduction
Rapid urbanization leads to severe traffic congestion in many cities, especially in metropolises, and constructing road tunnels is an effective solution to this problem [
1]. The cut-and-cover method, which involves the excavation of foundation pits and the construction of tunnel structures within the foundation pits, is a commonly used construction method for road tunnels in cities. Foundation pit works can result in ground settlement surrounding a foundation pit; however, given that many foundation pits are located in the central areas of cities with mass roads, bridges, buildings, and pipelines nearby, excessive settlements may crack pavements and pipelines and even lead to the collapse of buildings and bridges [
2,
3]. Moreover, excessive settlements surrounding a foundation pit may indicate the foundation pit is at a high risk of collapse. In practice, detailed calculations regarding the deformation of a foundation pit and its surrounding ground settlements would be performed during the design of the foundation pit to avoid excessive settlements. However, the precise prediction of ground settlements at the design stage remains unrealistic because prediction accuracies of these calculation methods largely depend on the properties of soils and execution process, while these factors are uncertain at the design stage [
4]. Thus, field observation data on ground settlement are usually collected at the construction stage to aid in the understanding of the actual ground settlement, and based on these field data, it is possible to dynamically update the prediction of ground settlements. A full understanding of future ground settlements during the construction of foundation pits enables constructors to implement timely and appropriate control measures to mitigate ground settlement and thereby prevent accidents resulting from excessive settlements. Accordingly, it is of critical importance to accurately predict ground settlements during the construction of foundation pits, with the aim of mitigating the construction risk of tunneling projects at the construction stage.
To estimate the maximum ground settlements induced by excavation works, previous studies have developed various methods, including empirical methods, numerical methods, and machine learning-based methods. Empirical methods analyze the historical ground settlement data and represent the shape of the daily settlement trough induced by tunneling works using Gaussian or normal distribution curves; however, such methods cannot provide highly accurate results mainly because of the simple empirical relationships established to predict ground settlements [
5,
6]. Numerical methods overcome some limitations in empirical methods by using the finite element method, in which tunnel–soil–ground interactions are explicitly analyzed by taking into consideration a number of relevant factors, such as the non-linear behavior of soils, ground heterogeneity, and construction methods. However, numerical methods are criticized with regard to their accuracy and validity because finite element models are time-consuming to create and verify and are sensitive to boundary conditions [
7,
8]. With the development of artificial intelligence technologies, machine learning-based methods have been successfully applied in the prediction of excavation-induced ground settlements, and among these methods, artificial neural networks (ANNs) have been proved to be accurate and efficient for such prediction [
1]. Yet, most of these machine learning-based methods focus on the prediction of the maximum ground settlements and do not accommodate for the dynamic prediction of ground settlements on a daily basis [
9]. These studies developed different machine learning algorithms to map the relationships between static parameters, such as soil properties and the depths of foundation pits, and the maximum ground settlement. On the other hand, daily ground settlements may be significantly affected by time-dependent influence factors, such as construction stages and weather conditions. For example, excavation works may lead to large daily ground settlement, while ground settlement may change slowly during the construction of tunnel structures in a foundation pit. Accordingly, a dynamic settlement prediction method should take into consideration such time-dependent influence factors to promote the prediction accuracy on daily ground settlement. However, existing machine learning-based methods generally fail to do so and thus cannot be used for the dynamic prediction of ground settlements in a direct way.
Accordingly, this study intends to develop an ANN-based method for accurate and dynamic prediction of daily ground settlements surrounding a foundation pit. The selection of the ANN’s input parameters takes into consideration not only static influence factors, such as soil properties and the geometry of a foundation pit, but also time-dependent influence factors, including construction stages and weather conditions, as well as previous daily settlement monitoring data. The proposed method is validated using data collected from a cut-and-cover highway tunnel project in western Hangzhou, China.
This study is structured as follows. First, previous studies on the prediction of ground settlements induced by excavation or tunneling works are reviewed in the next section. Then, the establishment of an optimum artificial neural network is introduced with detailed step-by-step procedures in
Section 3. Next, data collected from a real tunnel project are utilized to demonstrate the validity and applicability of the proposed approach in the
Section 4. Finally, conclusions and future works are drawn in the
Section 5.
2. Literature Review
The excavation works of a foundation pit in soft ground areas can generate soil movements and further lead to the development of ground settlement surrounding the foundation pit [
10,
11]. Excessive ground settlement may damage existing structures and underground pipelines and also indicate a foundation pit to be in danger of collapse. To understand the risk of foundation pits and prevent such damages induced by excessive ground settlement, it is particularly important to know the levels of ground settlement as a result of excavation works [
12]. The prediction of ground settlement can be classified into two main types: type A predictions at the design stage and type B predictions at the construction stage [
4]. Type A predictions of ground settlement would be made based entirely on data available at the design stage, when many data, such as ground conditions and construction processes, could be unclear, leading to the uncertainties of the prediction results at this stage. On the other hand, type B predictions of ground settlement would be made based on the available data obtained during the construction, such as measurements made during excavation; the prediction results may be closer to the actual ground settlement compared with the prediction results of a type A prediction. Furthermore, given that the actual ground settlement could be obtained as construction progresses when applying the observational method, it is useful to update the prediction results based on these continuously obtained data to aid in the understanding of future ground settlement.
Generally, methodologies for the prediction of ground settlements induced by excavation or tunneling works can be divided into three categories: empirical, numerical, and machine learning-based methods.
2.1. Empirical Methods for the Prediction of Ground Settlements
Empirical methods adopt statistical methods to extract trends from historical in-site settlement-monitoring data, with the aim of developing empirical formulae to assist the prediction of ground settlements, based upon various parameters. Some researchers adopted multi-linear and non-linear regression analyses for developing regression models using parameters, such as deformation modulus, cohesion, internal friction angle, compressive strength, and depth-to-diameter ratio, to predict the maximum ground settlement [
13,
14,
15,
16]. Peck [
17] proposed mathematical formulae, named as “Peck’s model”, for the prediction of the maximum ground settlement during tunneling and used a normal distribution function curve to describe the transverse settlement trough over a single tunnel, as shown in Equations (1)–(4):
where
is ground settlement at a transverse distance
from the tunnel centerline;
is the horizontal distance between the location and the tunnel centerline in the transverse direction;
is the maximum transverse settlement at
;
is the stratum loss resulted from tunneling excavation;
is stratum loss ratio;
is radius of the tunnel;
is friction angle. Schmidt [
18] further modified Peck’s model to predict ground movements associated with soft ground tunneling. Moreover, O’Reilly and New [
6] refined and improved Peck’s model by adopting Gaussian curves to describe short-term ground settlement over a tunnel. Mohammadi et al. [
19] used statistical software to perform multiple regression analysis, aiming at obtaining linear or nonlinear models to predict the maximum ground settlement. Although these formulae can generally present the maximum ground settlements under different soil types, the prediction accuracies of these formulae are uncertain due to uncertainties of ground conditions and the execution process since those aspects cannot be fully understood at the design stage [
4,
9]. Additionally, empirical methods fail to fulfill the dynamic requirements of ground settlement prediction during construction [
20].
2.2. Numerical Methods for the Prediction of Ground Settlementss
Numerical methods, contrary to the empirical ones that consider only a mere handful of effective parameters on ground settlement, take into account the influence of a large number of factors, such as soil properties, the geometry of foundation pits, construction methods, and environmental factors, such as temporary stacking load and vehicle load [
21,
22]. In the last four decades, numerical methods have been extensively applied in the analysis of ground settlement induced by the construction of tunnels, and the results of these studies indicate the reasonable performance of numerical methods [
13,
23,
24,
25]. The settlement prediction accuracy of numerical methods greatly depends on the choice of the values of these factors, the constitutive model, and the accuracy with which the construction process is represented. However, the true values of some factors and parameters may be difficult to obtain, and inaccurate values could lead to unreliable predictions [
26]. For example, the parameters of soil properties are generally obtained from laboratory tests; however, the test results are often not representative of the in situ soil behavior due to sampling disturbance, change in in situ environment, and the effects of construction, leading to marked discrepancies between the prediction results of ground settlement and the on-site settlement-monitoring data [
27].
2.3. Machine Learning-Based Methods for the Prediction of Ground Settlements
Differing from empirical and numerical methods that rely on a thorough understanding of the complex, highly nonlinear, and uncertain responses of underground structures in soils, machine learning-based methods intend to learn patterns from existing data, collected from field instrumentation or historical cases [
1]. Specifically, machine learning-based methods aim at establishing the highly nonlinear relationships between inputs and the target output, i.e., ground settlements. Four machine learning algorithms have been widely used for the prediction of ground settlements: ANNs [
3,
20,
28,
29,
30,
31,
32], support vector machines (SVMs) [
9,
33,
34,
35], random forest methods (RFMs) [
36], and decision trees (DTs) [
37]. Leu and Lo [
20] developed an ANN to predict the intensity and the location of the maximum ground settlement in multiple construction stages based on three inputs: excavation areas, construction methods, and excavation depth. Mahmoodzadeh et al. [
37] adopted ANNs, SVMs, and DTs to predict the maximum ground settlement of urban tunnels based on three operational parameters, including tunnel width, tunnel depth, and excavation methods, and three soil parameters, including cohesion, friction angle and elasticity modulus. Among these machine learning algorithms, ANNs generally perform best when the relationships between inputs and outputs are highly non-linear, and, therefore, ANNs are especially suitable for solving ground settlement prediction problems where relationships between input parameters and ground settlements are highly non-linear [
1].
A majority of existing studies focus on predicting the maximum ground settlements using static input parameters and neglect the capability of their methods to perform dynamic predictions [
38]. Such static results fail to fulfill the needs regarding the dynamic updates of ground settlements over time [
9]. Accordingly, some researchers intended to utilize real-time obtained field settlement-monitoring data, which directly reflect the comprehensive effect of all the influential variables and can provide deep insight into the future settlement, to realize dynamic predictions. Xie and Pan [
39] developed a back-propagation neural network (BPNN) to predict the ground settlement of a foundation pit in the next stage based on the monitoring settlement data in the last four stages. Qiao et al. [
3] focused on the development of an ANN-based approach to predict the daily ground settlement by utilizing real-time settlement monitoring data as the inputs of an ANN to consider the influence of time series.
In addition to static influence factors and previous settlement monitoring data, time-dependent construction stages, such as the increase in excavation depth, the casting of bottom slabs, and the installation and removal of braces, have a significant influence on the change of daily ground settlements [
40,
41]. Moreover, weather conditions may also affect daily ground settlements by affecting the level of underground water. For example, continuous heavy rain may increase the level of underground water and, therefore, may result in the change of earth pressure on supporting structures. Nevertheless, time-dependent influence factors were generally neglected in current machine learning-based methods and failing to do so will limit the settlement-prediction accuracy of ANNs. For this reason, time-dependent influence factors—such as construction stages and weather conditions—should be considered in ANNs to facilitate accurate and dynamic prediction of daily ground settlements surrounding a foundation pit.
3. Methodology
3.1. Artificial Neural Network
Artificial neural networks (ANNs) are computing systems whose working principles are inspired by biological neural networks, which are constituents of a nervous system and contain a great number of interconnected nerve cells. The back-propagation neural network (BPNN) is a feed forward ANN using the back-propagation learning algorithm proposed by Rumelhart et al. [
42] and Hertz et al. [
43] and has been proved to be efficient and effective in predicting ground settlements [
31,
44,
45].
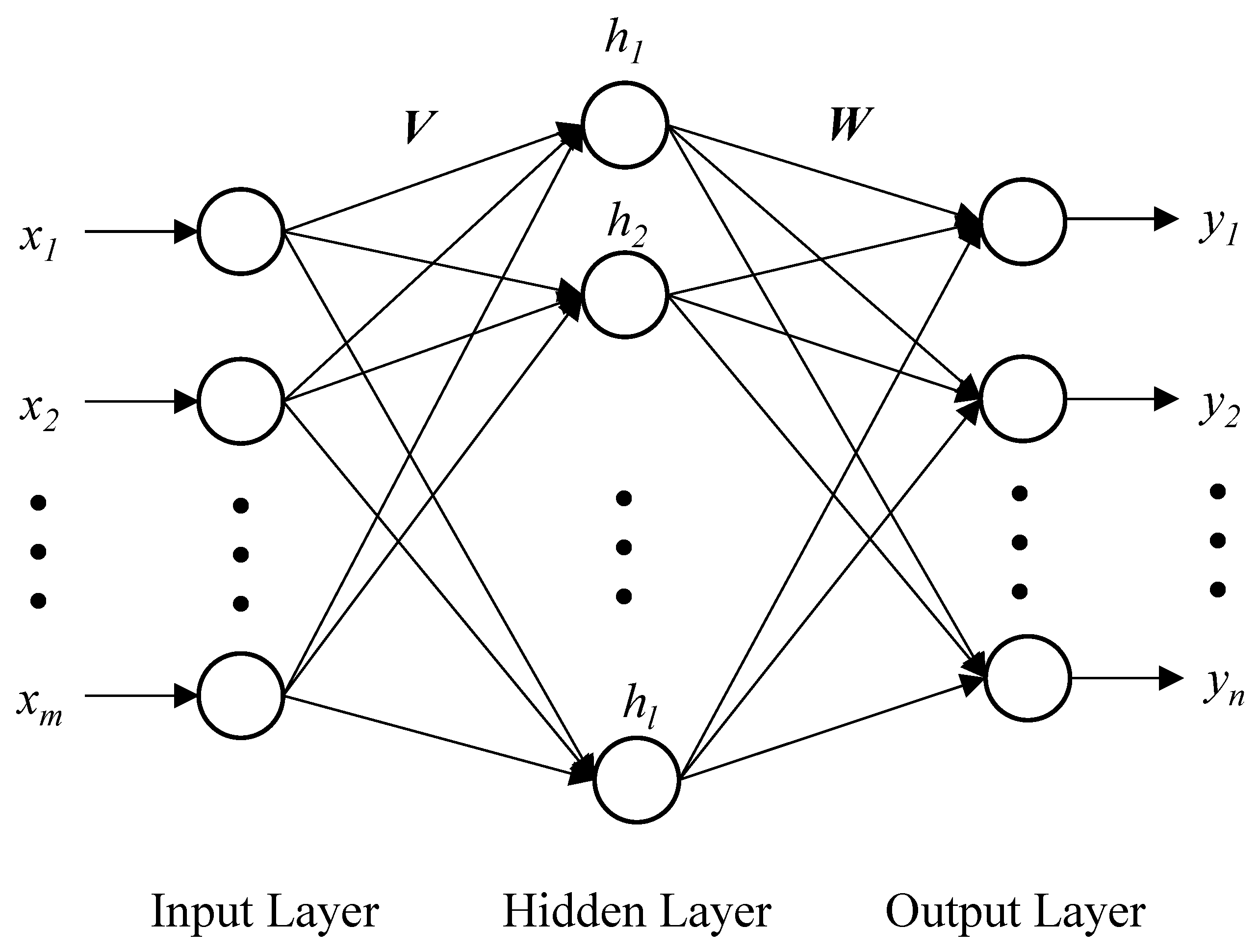
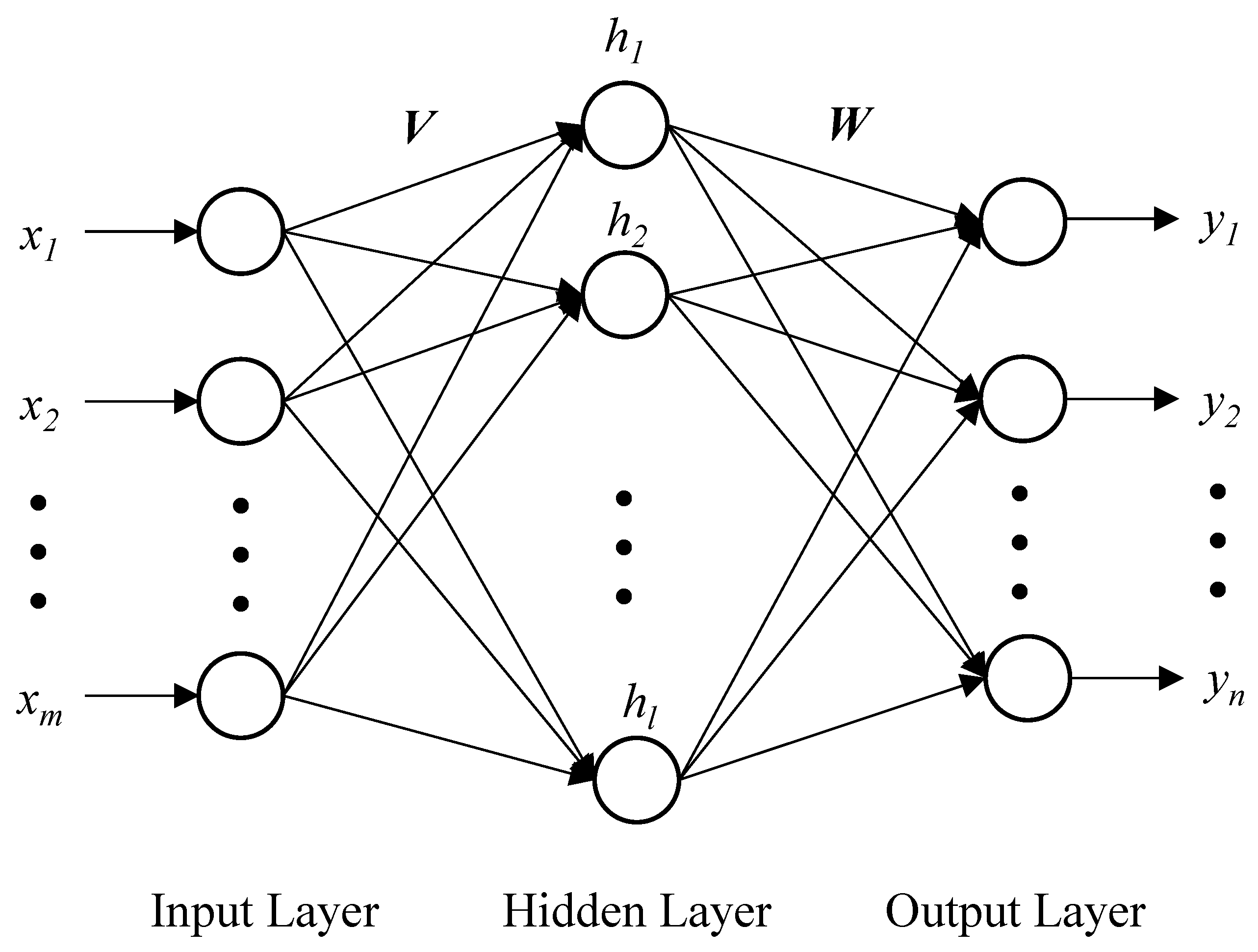
As shown in
Figure 1, a general BPNN model consists of three layers: an input layer, a hidden layer, and an output layer. Each layer includes a set of neurons, and each neuron in the hidden layer or the output layer is connected to all neurons in the previous layer. The learning process of a BPNN consists of two steps: forward propagation of signal and back propagation of error [
46]. In the forward propagation, input signal
enters the input layer, propagates forward through the hidden layer to form hidden layer signal
, and finally appears at the output layer as an output signal
. Connections between adjacent layers can be formulated by the following equations:
where
are weights of links between the input layer and the hidden layer;
are weights of links between the hidden layer and the output layer;
and
are biases associated with neurons in the hidden layer and the output layer, respectively; the transformation function
is a unipolar Sigmoid function to transmit signal from the input layer to the hidden layer, and from the hidden layer to the output layer.
After obtaining the output signal, it is compared to the target output signal
. Consequently, an error signal of the output layer
is generated if the output signal is inconsistent with the target output signal, and
is calculated by Equation (7):
Furthermore, the error signal of the hidden layer
is calculated by Equation (8):
Next, the error signal will be propagated backward through the hidden layer to the input layer to adjust weights, i.e.,
and
, and biases, i.e.,
and
, in Equations (5) and (6) using the following equations:
where
is the learning rate. A BPNN learns about the relationships between the input signal and the output signal through this iterative process, and theoretically, the BPNN becomes more knowledgeable about such relationships after each iteration. The learning process will continue until the error signal of the output layer is smaller than the maximum permissible error.
3.2. Input Parameters
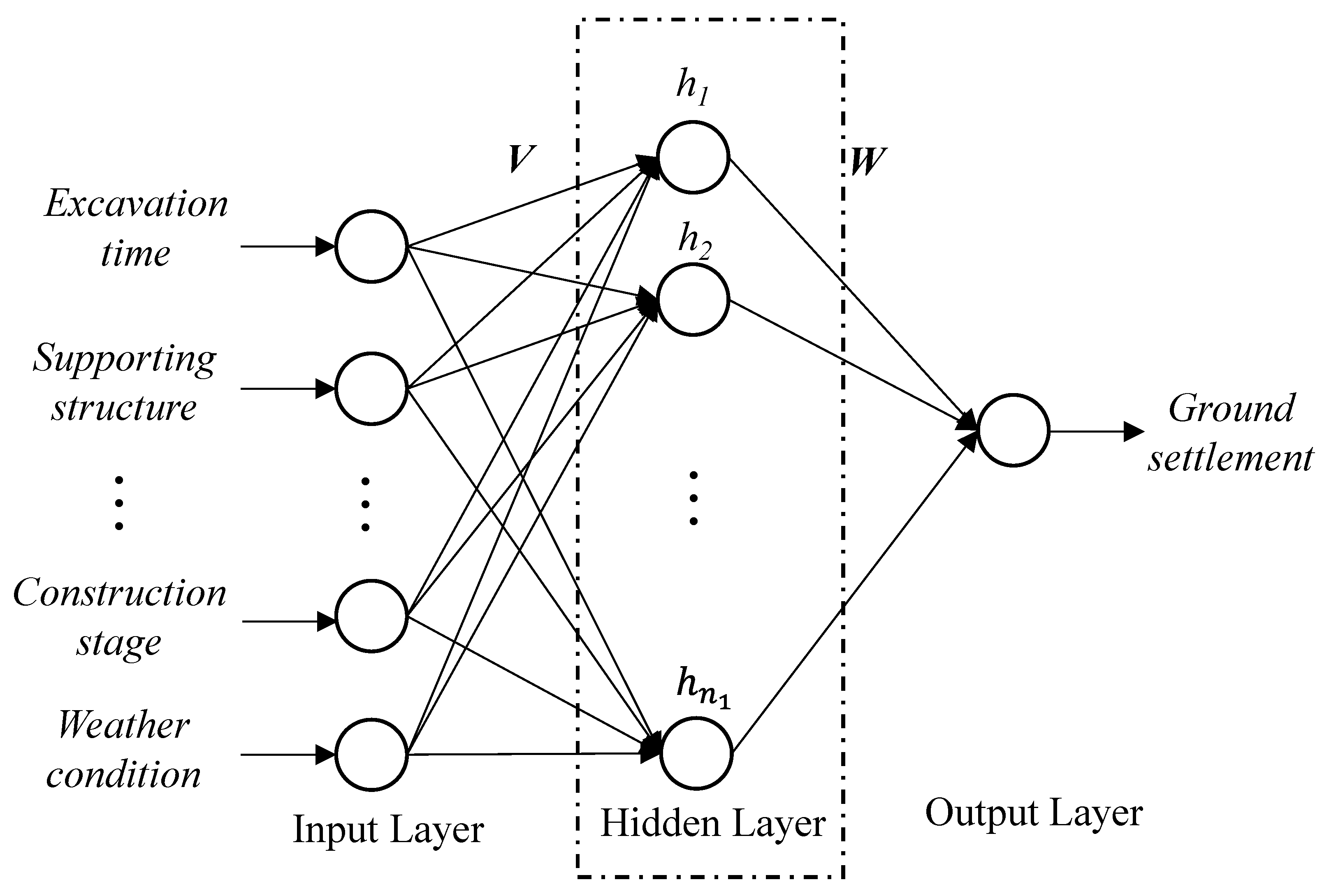
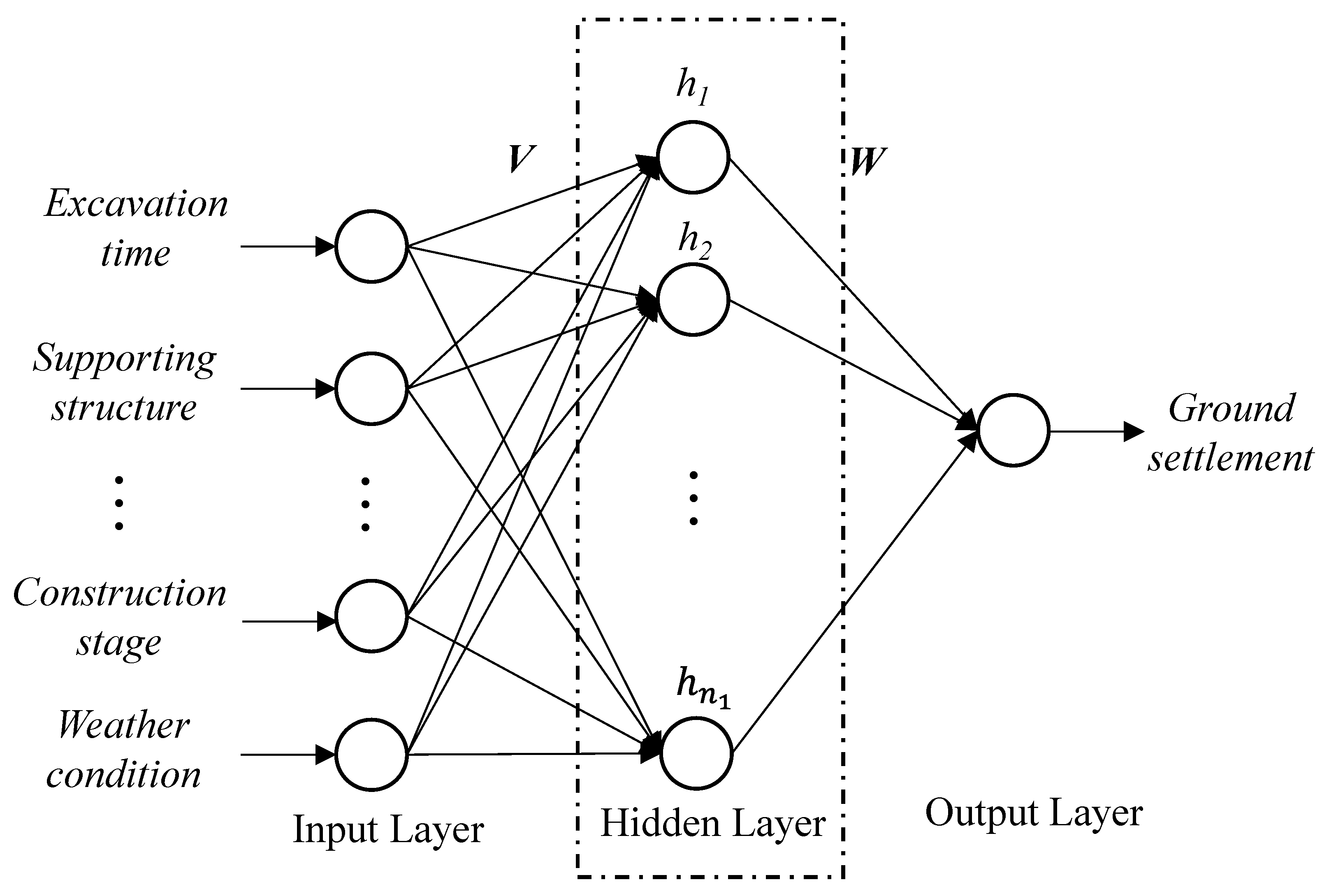
The proposed study classifies these influencing factors of the ground settlement surrounding a foundation pit into six categories: excavation time, supporting structures, weather conditions, construction stages, soil types, and previous settlement monitoring data, as shown in
Table 1.
The first category is excavation time, indicating the time effect on ground settlement. Generally, ground settlements will continuously increase overtime during the construction of a foundation pit because excavation works will lead to the stress release of the nearby soil and change the earth pressure on supporting structures [
3]. The second category includes types, stiffness, and depths of supporting structures, and this study considers five types of supporting structures that are widely used in eastern China. The third category includes nine time-dependent influence factors, indicating different construction stages of a cut-and-cover method. The fourth category is the weather condition, which may affect the level of underground water and the property of soils. The fifth category is the soil effect, represented by types of soils above the bottom of a foundation pit, given that soils in this zone directly affect earth pressure on supporting structures. Specifically, this study uses soil types, instead of specific soil parameters, such as soil weight, internal friction angle, and soil cohesion, to represent the soil effect because a foundation pit may cross a number of soil layers, whose soil parameter values are different and cannot be represented by unified values. Moreover, the proposed study considers five types of soil, which are commonly found in the Yangtze River Delta region, China. The last category includes a set of previous settlement monitoring data, which provides insight into the future ground settlement in a direct way. Finally, the values of these input parameters are shown and explained in the last column of
Table 1.
3.3. Establishment of an Optimum BPNN
Performance evaluation methods should be determined to compare the performance of different BPNNs, and root mean square error (
) is a commonly used measurement for such comparison [
13]. The definition of
is given as follows:
where
is the value of the output generated by the BPNN, i.e., the predicted ground settlement;
is the value of the target output, i.e., the actual ground settlement monitored at the site;
is the total number of output data. A small value of
indicates a high prediction accuracy.
A key parameter for determining an optimum BPNN is the number of neurons in its hidden layer
, and such a number is obtained mainly through experience or experimental tests without an exact calculation method [
45]. Nevertheless,
can be roughly estimated using the following equation [
47,
48]:
where
and
are the numbers of neurons in the input layer and the output layer, respectively;
is a value between 0 and 10. Accordingly, a specific BPNN for the proposed study is established, as shown in
Figure 2.
Furthermore, the proposed study adopts the 10-fold cross-validation method to avoid overfitting of the optimum BPNN model. In this method, a training dataset is divided equally into 10 subsets, and 9 subsets are randomly selected for training BPNN models and the other dataset is used for validation. Accordingly, 10 can be calculated for a BPNN model, and the average value of is considered as the estimate of the real value of of the BPNN model. The model with the smallest average value of is set as the optimal BPNN model.
4. Case Study
4.1. Background
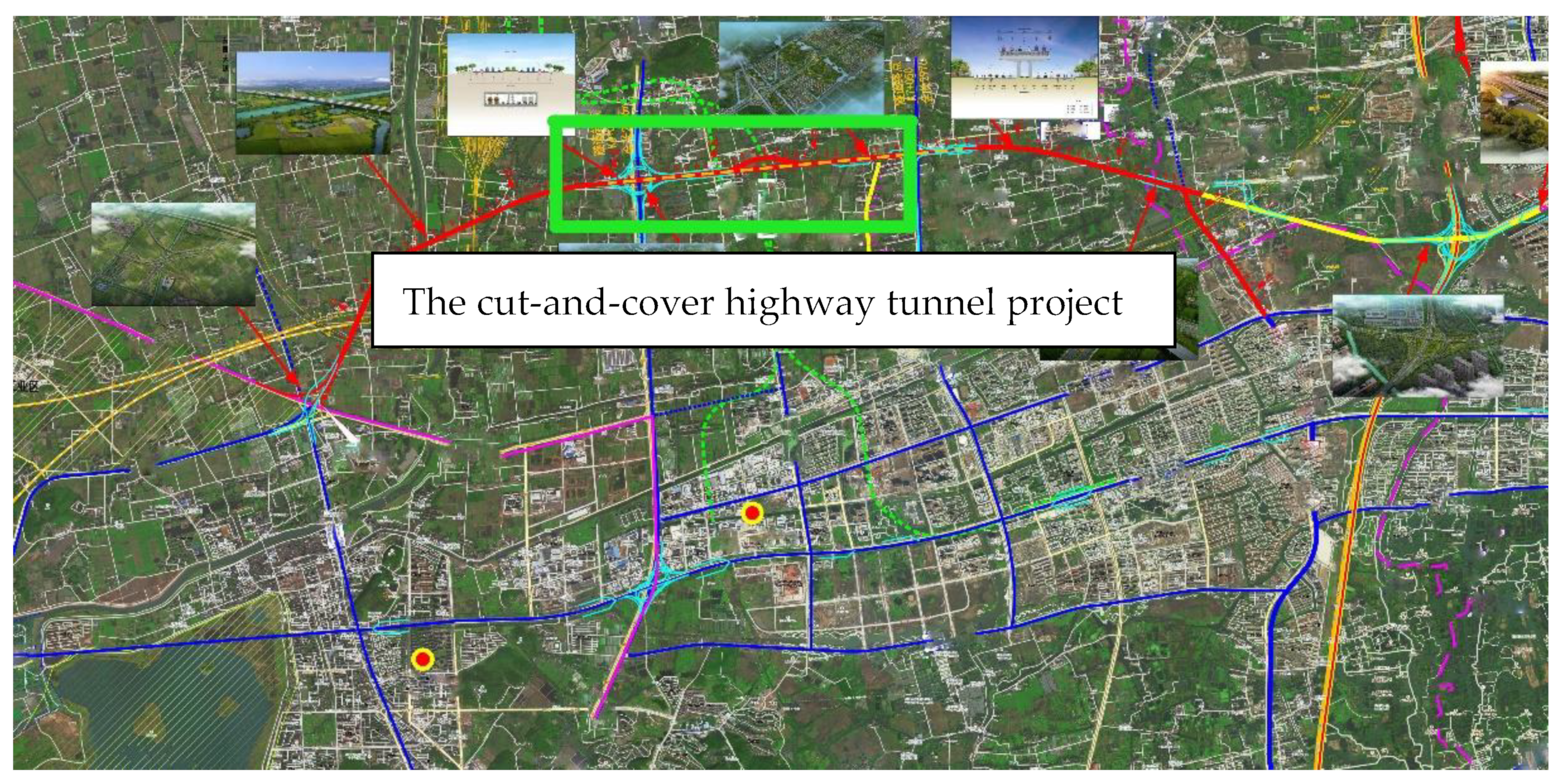
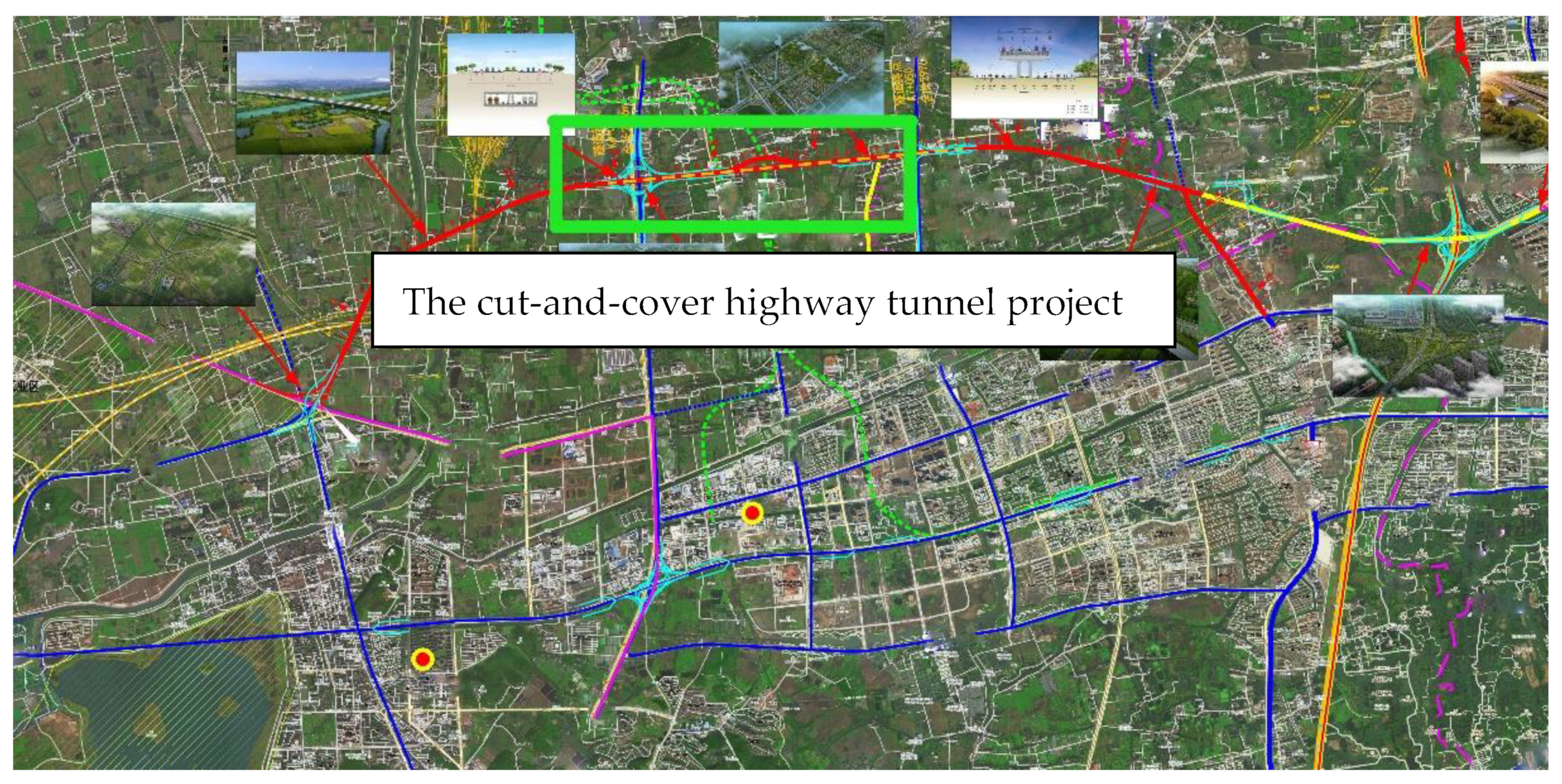
The case study is based on a cut-and-cover highway tunnel project in Yuhang District, Hangzhou, China, and this tunnel is a key link to connect the Hangzhouxi Railway Station to the expressway network in Hangzhou, as shown in
Figure 3. Construction of this highway tunnel was started from April 2021 and is expected to be finished in December 2022. The highway tunnel was 3.63 km long and was divided into 14 foundation pits, with their depths ranging from 0 to 15.2 m and their width ranging from 31.5 m to 35.9 m. The types of supporting structures of these foundation pits included the gravity-retaining wall, the soil-mixing wall, the bored pile, the drilling bitten pile, and the slurry wall. Moreover, given that there were generally four types of soils above the bottom of these foundation pits, this study considers four soil layers, and thereby, the number of input parameters in the fifth category in
Table 1 is four. Nevertheless, the number of soil layers above the bottom of foundation pits may be different in other projects, and such a number could be determined according to practical projects. Finally, the optimum number of previous settlement monitoring data considered as input parameters was determined by a set of preliminary experiments, where the number of previous settlement monitoring data was set from one day to nine days, as referred to previous literature [
3,
27,
39], and the results showed that the highest prediction accuracy was obtained when previous monitoring data collected in the last three days were considered. Accordingly, three previous monitoring data were set as input parameters of the proposed BPNN.
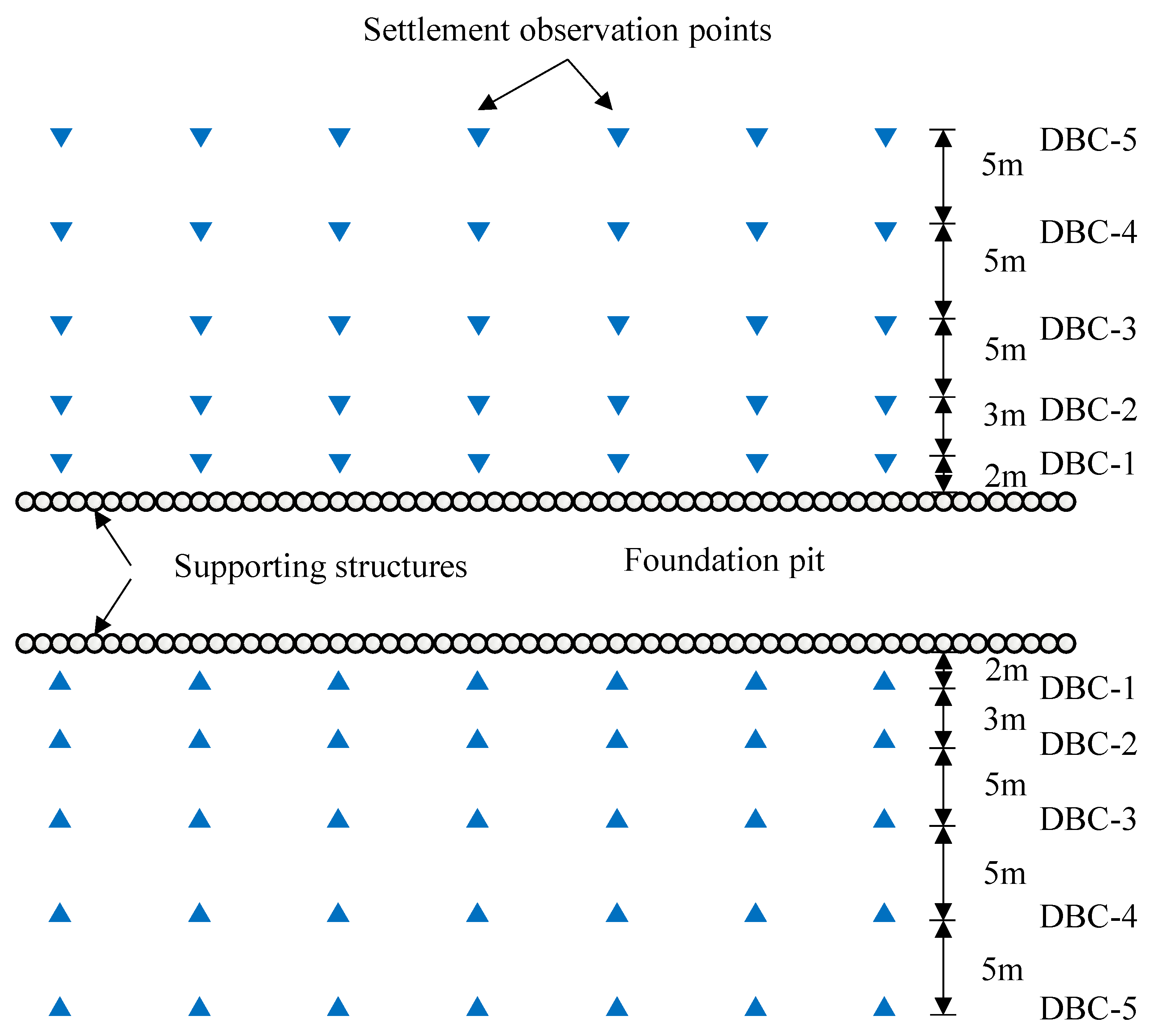
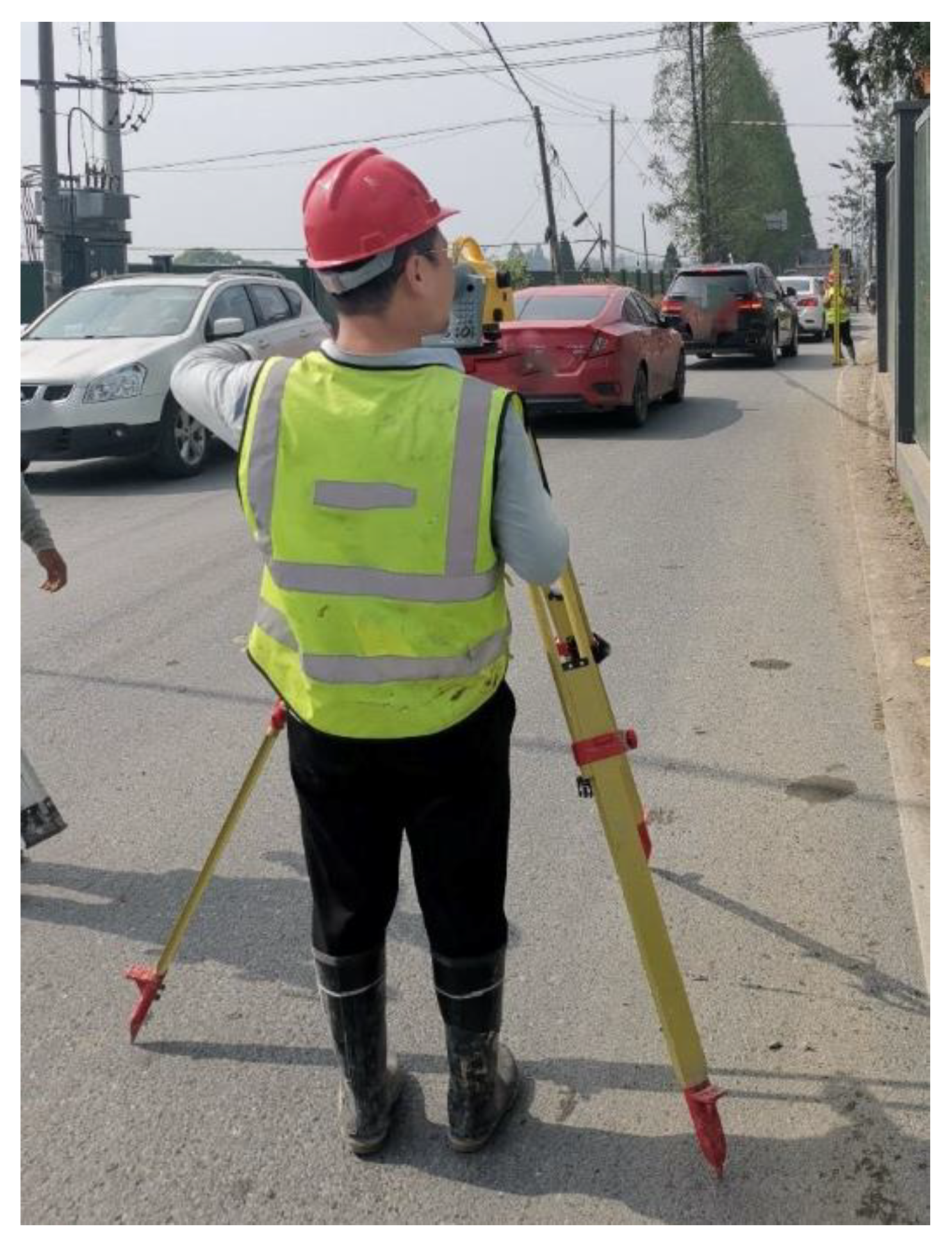
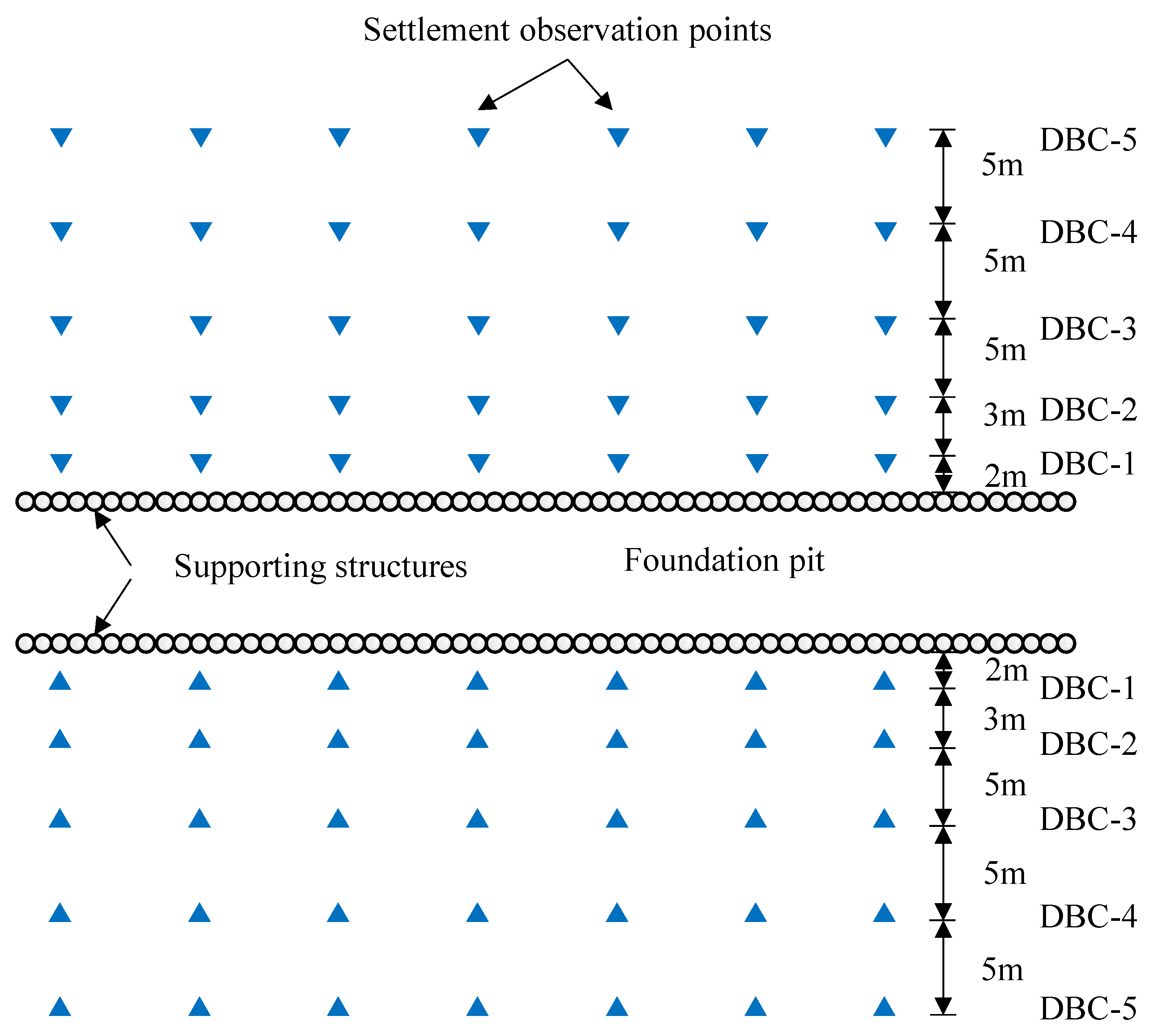
Settlement observation points were distributed in five rows along supporting structures outside these foundation pits, and the distances from these five rows to the outer edge of the supporting structures were 2 m, 5 m, 10 m, 15 m, and 20 m, respectively, as shown in
Figure 4. Construction monitors measured settlements of these observation points once a day during the construction of the highway tunnel using a dumpy level, as shown in
Figure 5, and put the monitoring data, detailed construction stages, and weather conditions in the daily monitoring report. Data used in this paper were extracted from the daily monitoring report from 8 June 2021 to 20 October 2021, and, finally, 16,275 sets of data were obtained. The parameters of the proposed BPNN that were found to result in optimal computational efficiency were found to be an epoch of 200, a learning rate of 0.1, and a tolerance of 0.00001. The MATLAB 2019a language was used to program the BPNN, and all tests were performed on an Intel(R) Core™ i9-10900 CPU @ 2.80 GHz with 32 GB RAM in the environment of Microsoft Windows 10.
The results of the case study are discussed in the following section. First, the optimum number of neurons in the hidden layer are investigated in
Section 4.2.1. Then, the prediction results of the optimum BPNN are demonstrated in
Section 4.2.2. Next, the impacts of the size of the training dataset, types of input parameters, and the source of training data on the settlement-prediction accuracy of BPNNs are discussed in
Section 4.2.3,
Section 4.2.4, and
Section 4.2.5, respectively.
4.2. Results and Discussion
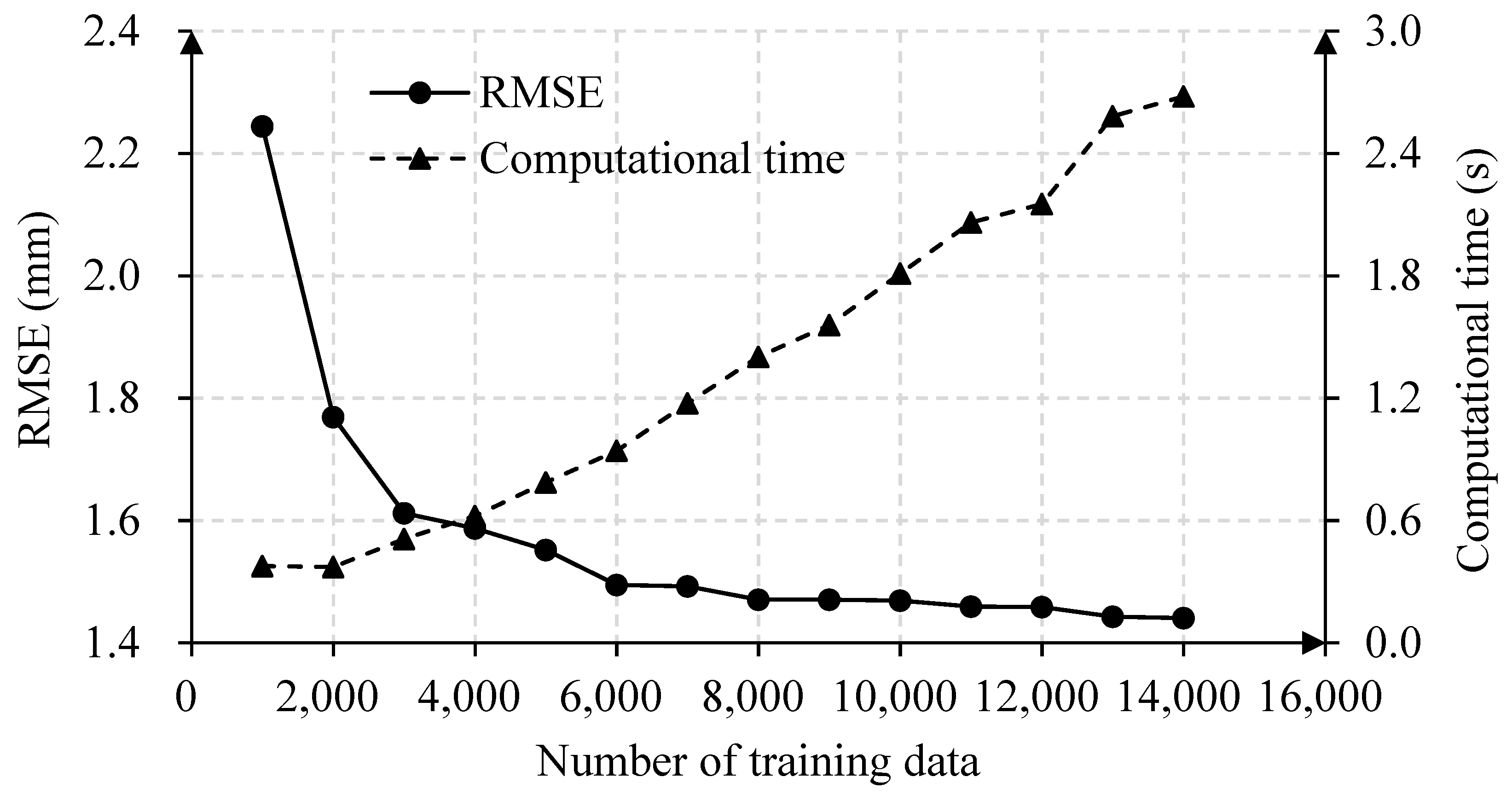
4.2.1. Number of Neurons in the Hidden Layer
The optimum number of neurons in the hidden layer
was roughly estimated using Equation (14), where the value of
is 21 and the value of
is 1. Accordingly, the value of
may range from 5 to 15. Furthermore, 30 cases, where the number of neurons in the hidden layer of a BPNN was set from 1 to 30, were run to explore the exact value of
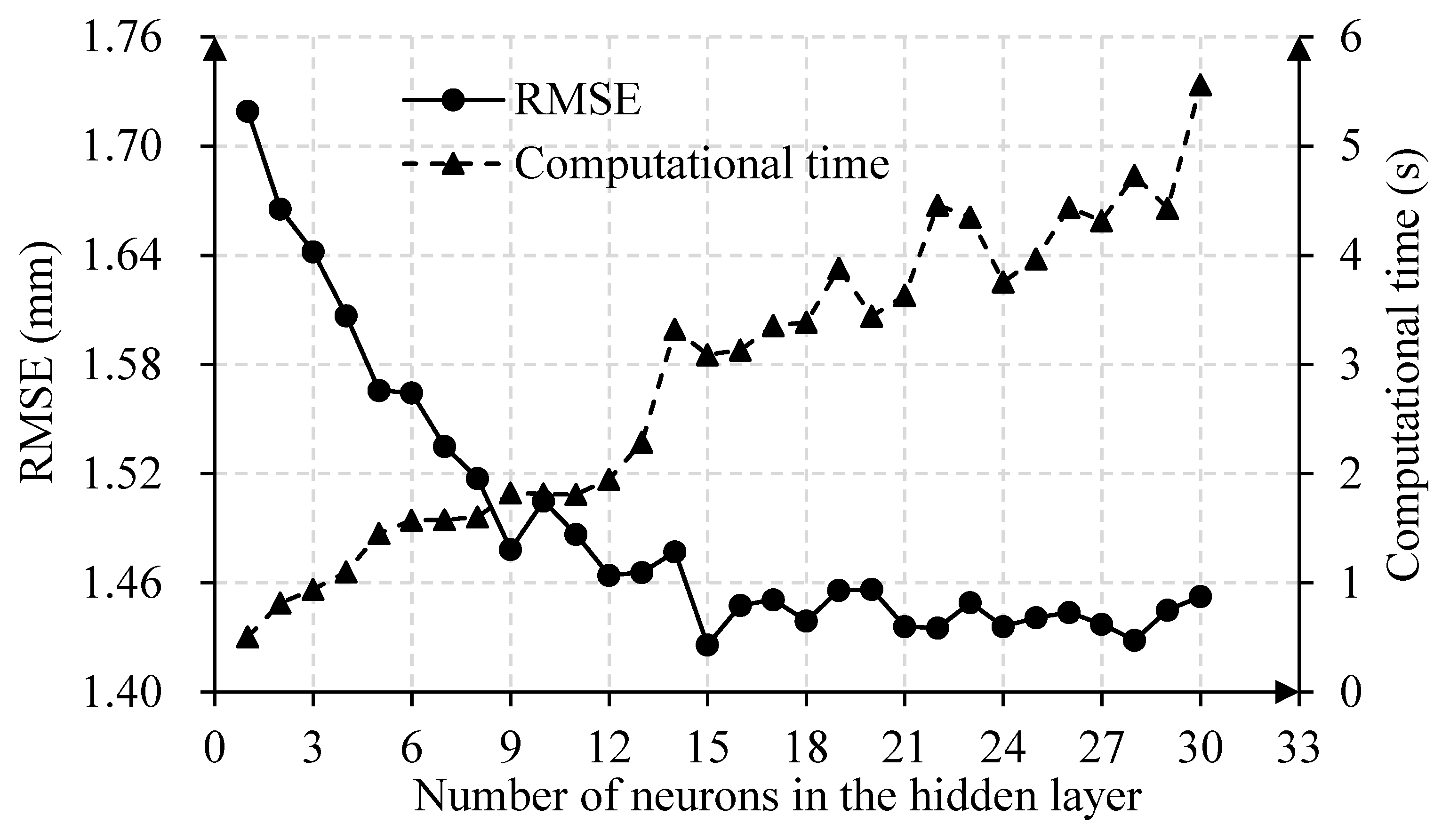
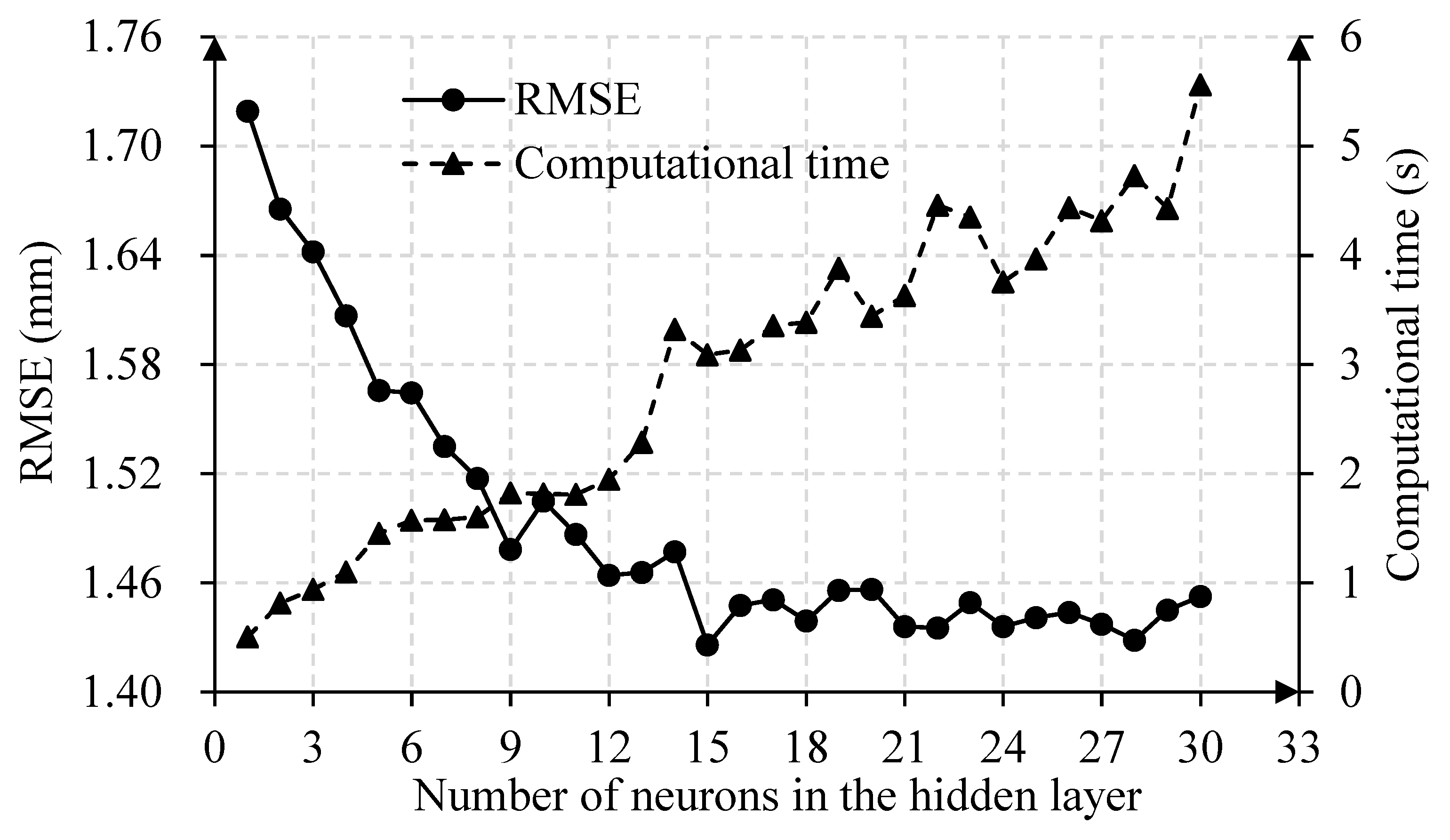
of an optimum BPNN. In each case, 500 BPNNs were trained, and the average value of
, as well as the average computational time for training a BPNN, were illustrated in
Figure 6. The results show that the value of
generally decreased as the number of neurons in the hidden layer increased from 1 to 15, while the value of
fluctuated when such a number increased from 15 to 30. Therefore, the number of neurons in the hidden layer of the BPNN with the highest prediction accuracy in the proposed case study is 15, and the
of the prediction result is 1.43 mm. Additionally, the average computational time for training a BPNN shows a trend of wavy increase with an increase in the number of neurons in the hidden layer of a BPNN.
4.2.2. Prediction Results of the Optimum BPNN
In the proposed case study, the data collected from five settlement observation points in the same column, i.e., 350–1, 350–2, 350–3, 350–4, and 350–5, were used as testing samples, and the data collected from the other 326 settlement observation points were used for training the optimum BPNN. To comprehensively understand the prediction accuracy of the optimum BPNN, two error measurements, i.e., absolute error
and absolute error percentage
, are introduced as follows [
13]:
where
is the output of the BPNN, i.e., the predicted ground settlement at a settlement observation point;
is the target output of the BPNN, i.e., the actual ground settlement at a settlement observation point. Accordingly, the average absolute error
and average absolute error percentage
at a settlement observation point can be calculated as follows:
where
is the number of prediction data.
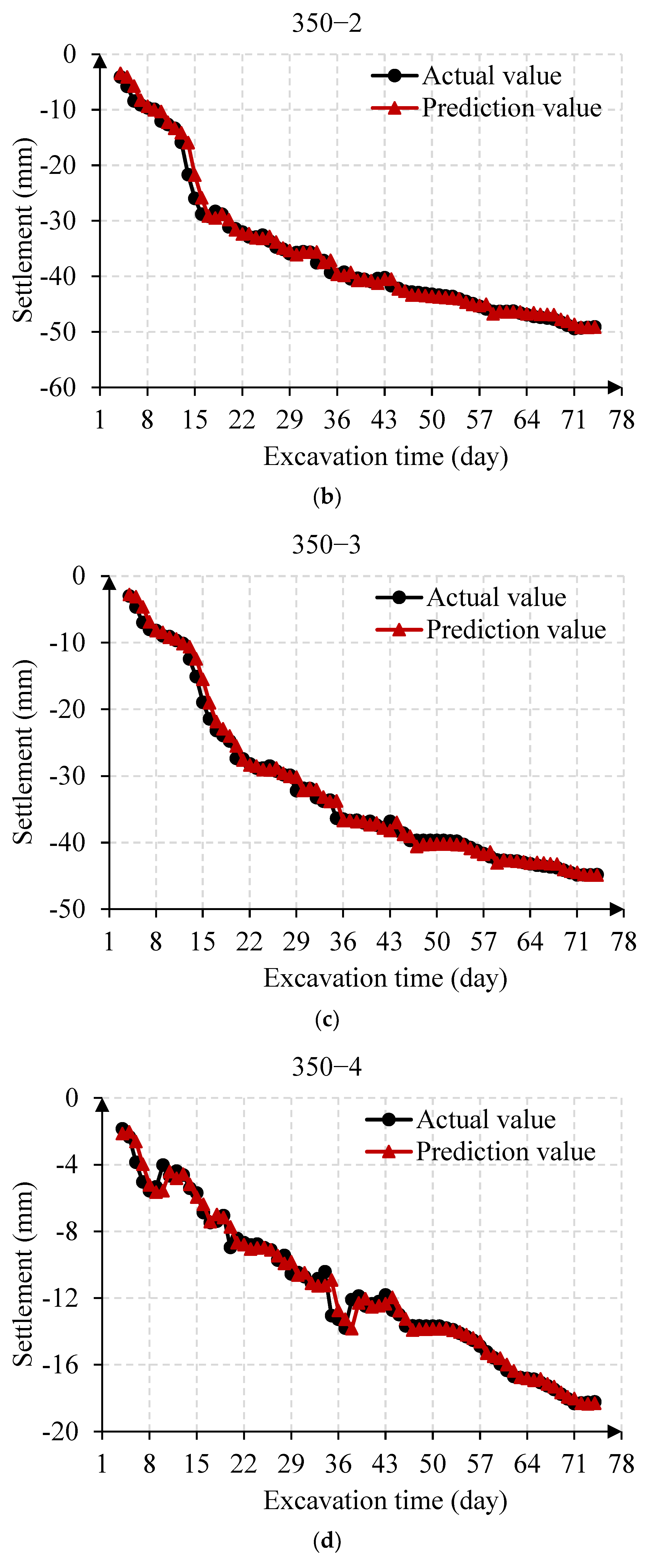
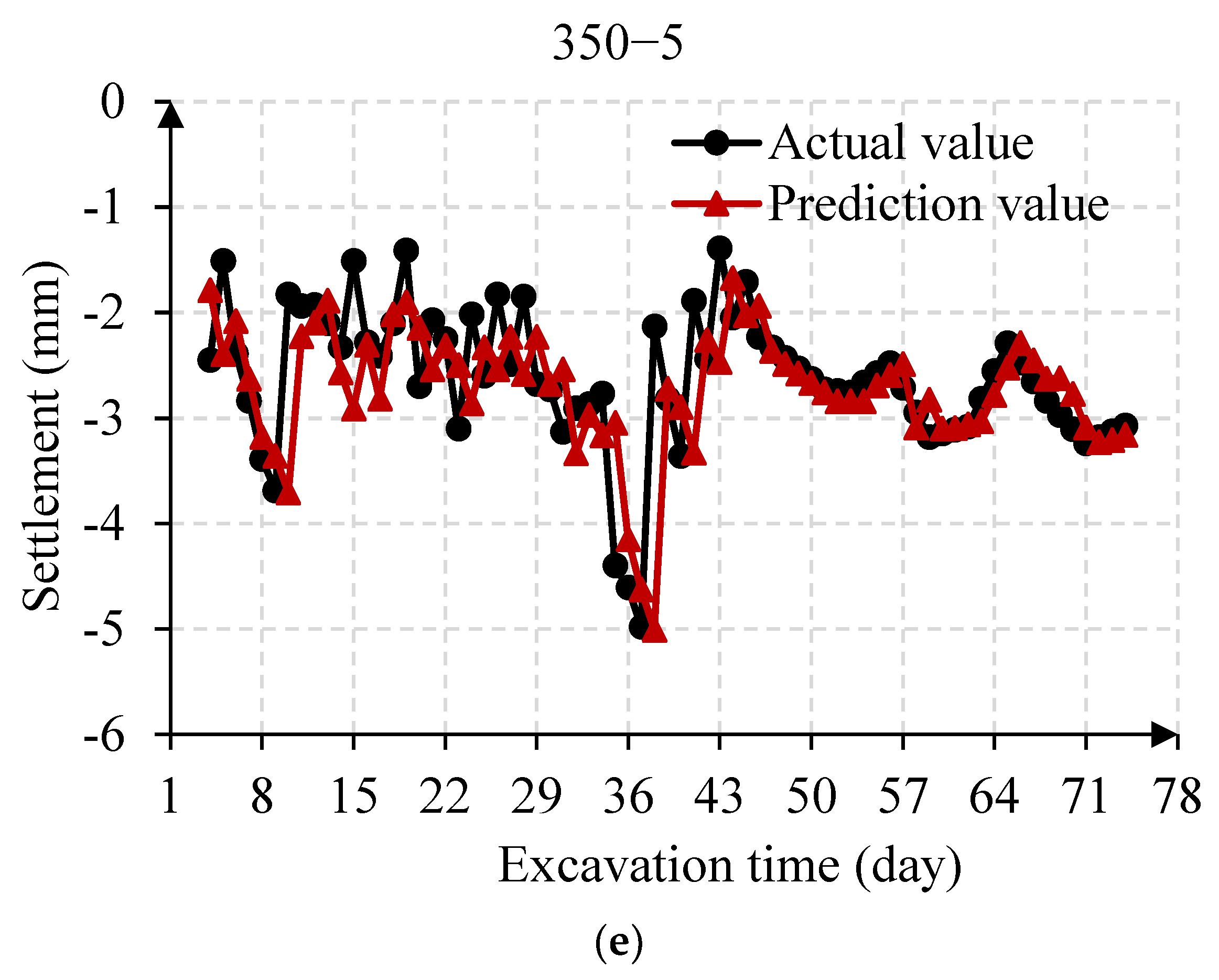
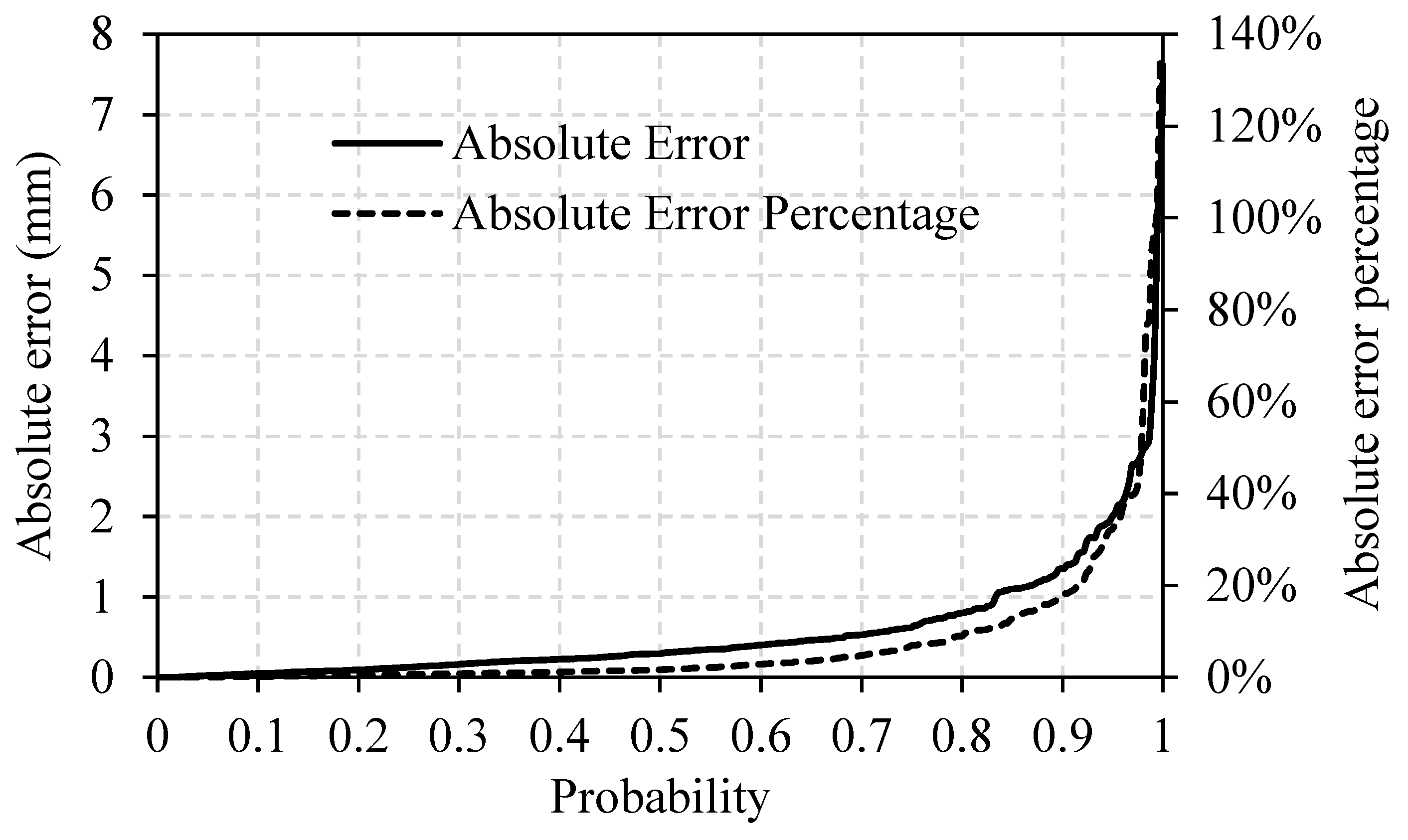
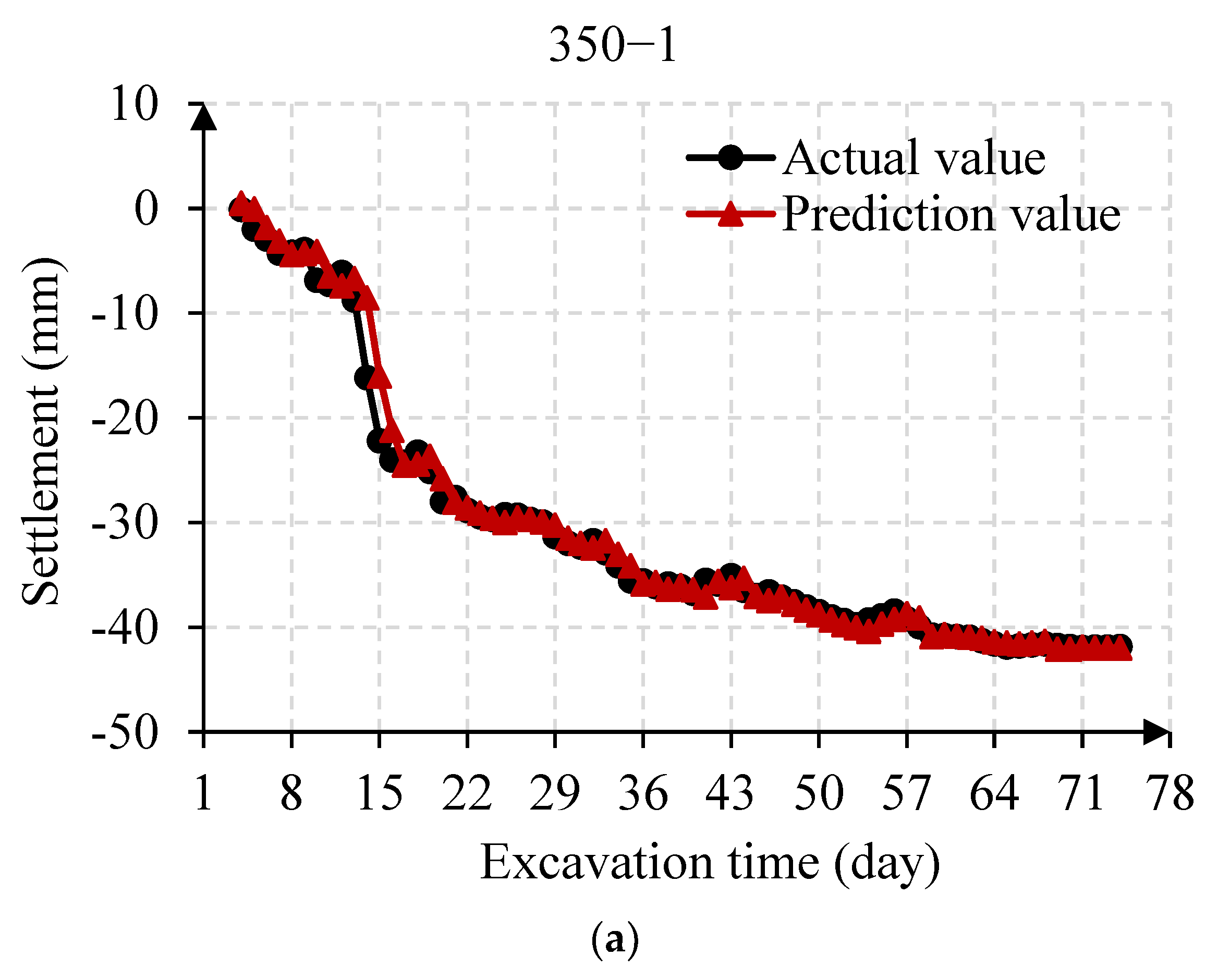
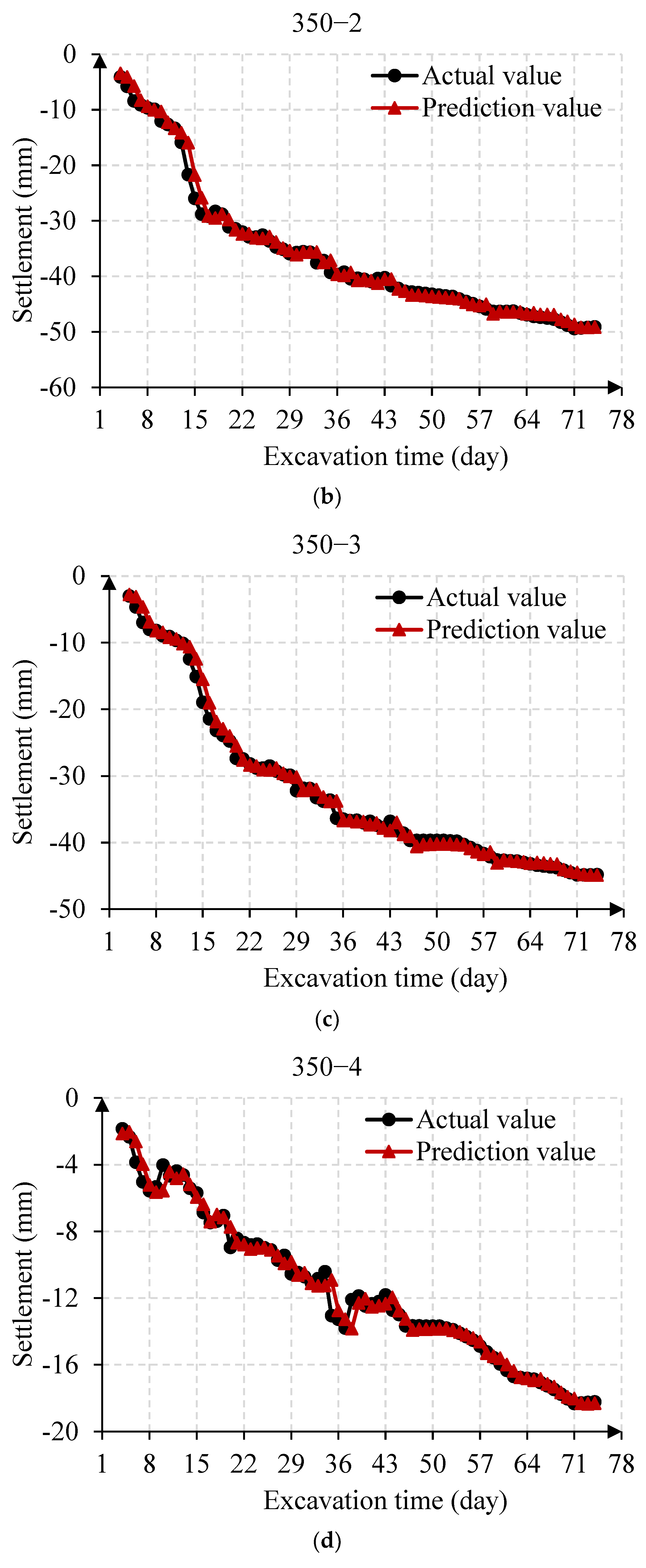
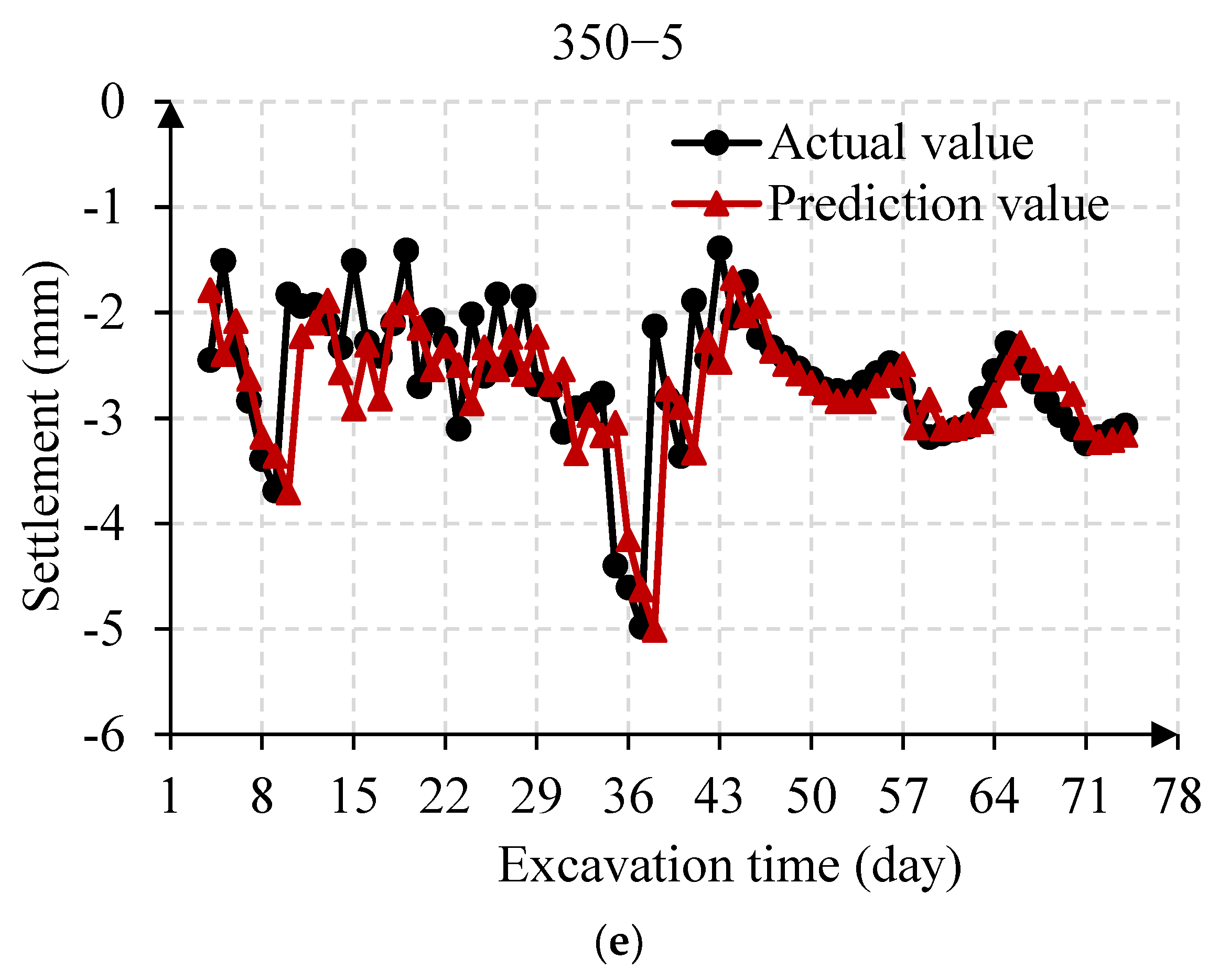
The comparisons of the prediction results and the actual ground settlements at these five settlement observation points from day 4, i.e., 11 June 2021, to day 74, i.e., 20 August 2021, are shown in
Figure 7. Particularly, the monitoring data collected from day 1 to day 3 were used to predict ground settlements on day 4. The results show that the variation tendency of the predicted ground settlements is generally consistent with the variation tendency of the actual ground settlements. Specifically, the absolute error
of more than 95% of the predicted ground settlements are less than 2 mm, as shown in
Figure 8, and the average absolute error
of the prediction results is 0.57 mm, as shown in
Table 2. It can be concluded that the prediction results are fairly close to the actual settlement monitoring results, and thus it is safe to say that the proposed BPNN is able to accurately predict ground settlements on a daily basis. On the other hand, the maximum absolute error of prediction results is 7.6 mm at settlement observation point 350−1 on day 14, when the actual ground settlement at this location sharply increased by 7.43 mm. Such a sharp increase in ground settlement mainly resulted from over-excavation and the slow erection of steel supports. Accordingly, unnormal variation of ground settlements due to unnormal construction conditions may lead to significant prediction errors of the proposed BPNN model.
Moreover, the absolute error percentage
of more than 80% of the predicted ground settlements are less than 10%, as shown in
Figure 8, and the average absolute error percentage
of the prediction results is 7.02%, as shown in
Table 2. The value of
at settlement observation point 350–5 is significantly larger than the values of
at the other four settlement observation points, probably because settlement observation point 350–5 is far away from the outer edge of the foundation pit, and other factors, such as heavy truckloads, may significantly affect ground settlement at this location, while these factors were not considered in the proposed study.
4.2.3. The Impact of the Size of the Training Dataset on Prediction Accuracy
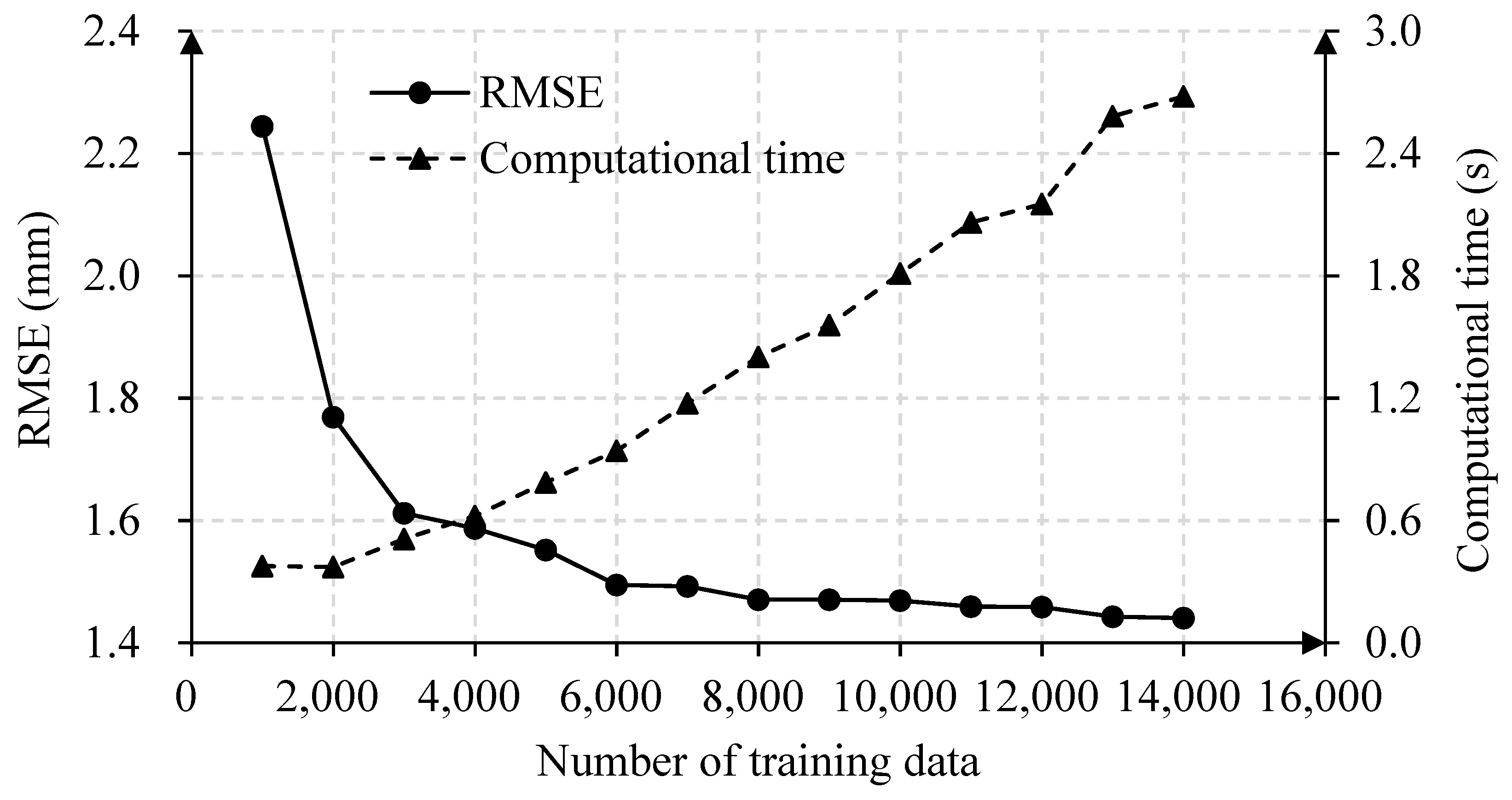
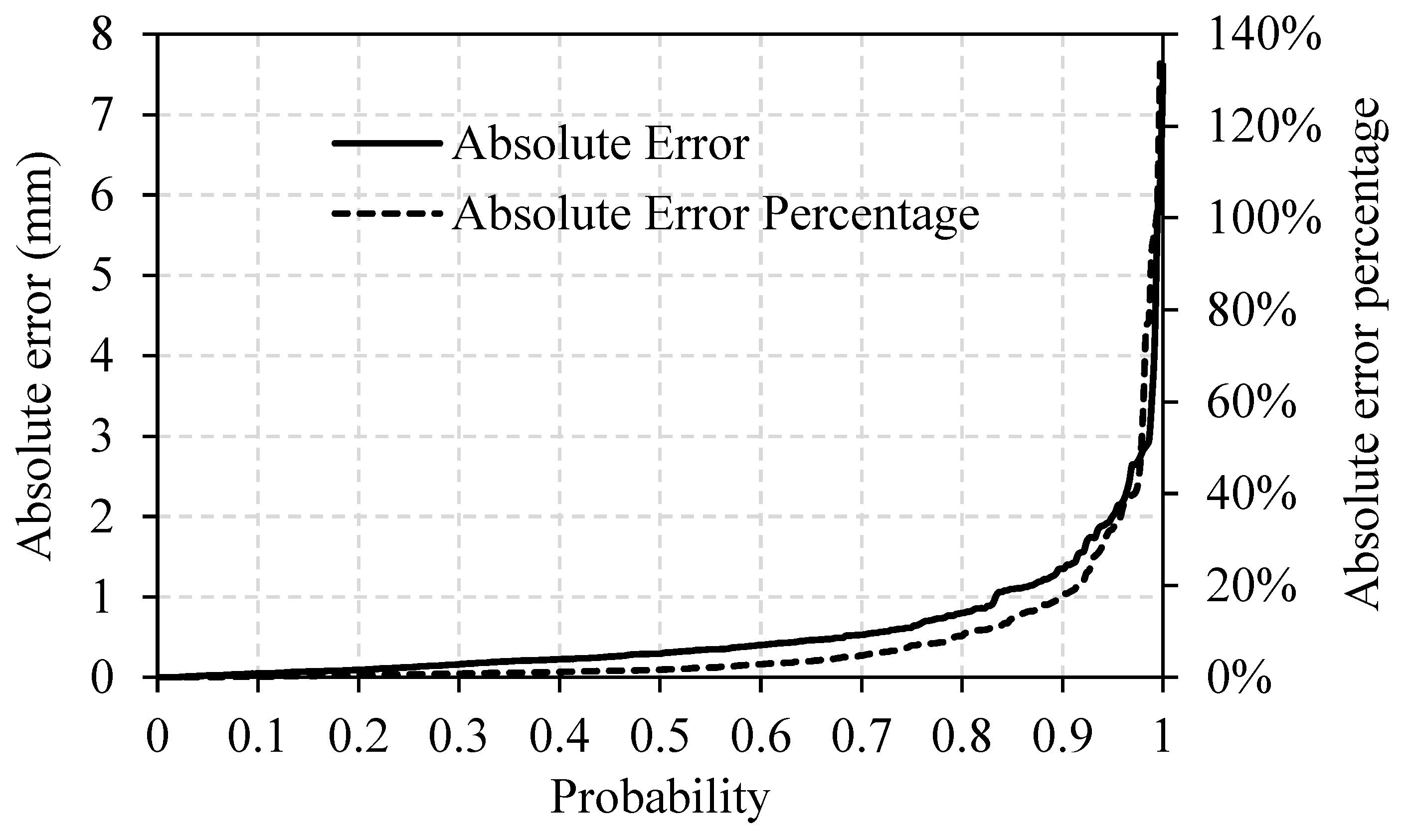
This study tested the prediction accuracies of 14 BPNNs trained using 14 training datasets with their sizes increasing from 1000 to 14,000 in intervals of 1000. The validation dataset included 2000 sets of data. As illustrated in
Figure 9, the results show that the value of
decreased significantly as the size of the dataset increased: from 2.245 mm with 1000 training data to 1.440 mm with 14,000 training data. Moreover, the computational time for training an optimum BPNN increased approximately linearly, from 0.376 s to 2.679 s when the number of training data increased from 1000 to 14,000. Such results indicate that the prediction accuracy of the optimum BPNN can be further improved when more training data are collected in the future, while the increase in computational time for training an optimum BPNN is still acceptable.
4.2.4. The Impact of the Types of Input Parameters on Prediction Accuracy
Six more cases were designed to investigate the impacts of different types of input parameters on the prediction accuracies of BPNNs. In each case, one type of influence factor in
Table 1 was removed from the input data, and a new BPNN was trained to establish the relationship between the other five types of factors and ground settlements. The prediction results at these five settlement observation points were shown in
Table 3. Compared with the prediction results of the optimum BPNN in
Section 4.2.2, neglecting time-dependent influence factors significantly increased the prediction errors of BPNNs. Specifically, the average absolute error
increased by 54.4% if construction stages were neglected, and
increased by 49.1% if weather conditions were neglected. Accordingly, it can be concluded that time-dependent influence factors regarding construction stages and weather conditions should be taken into consideration in BPNN-based ground settlement prediction models. Additionally, neglecting previous monitoring data led to a dramatic increase in
of the optimum BPNN, from 0.57 mm to 16.98 mm, indicating that previous monitoring data are critical input parameters in establishing an accurate BPNN-based ground settlement prediction model.
4.2.5. The Impact of the Sources of Training Data on Prediction Accuracy
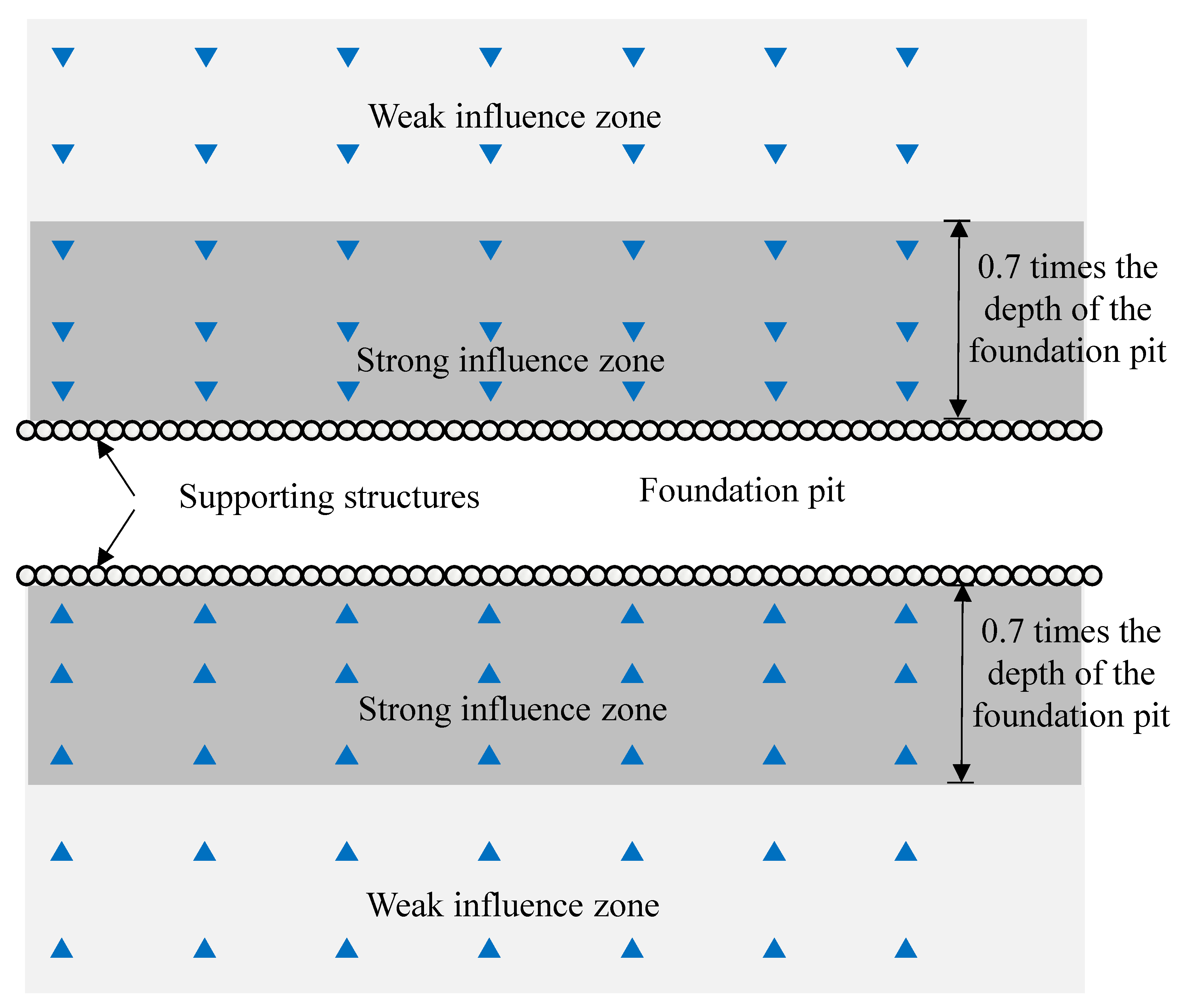
Given that the influence of a foundation pit on its surrounding ground settlements gradually weakens with the increase in the distance to the outer edge of the foundation pit, the influence zone of a foundation pit, according to the Chinese standard [
49,
50], can be divided into a strong influence zone, i.e., the area with its distance to the outer edge of the foundation pit less than 0.7 times the depth of the foundation pit, and the weak influence zone, i.e., the area with its distance to the outer edge of the foundation pit larger than 0.7 times the depth of the foundation pit, as illustrated in
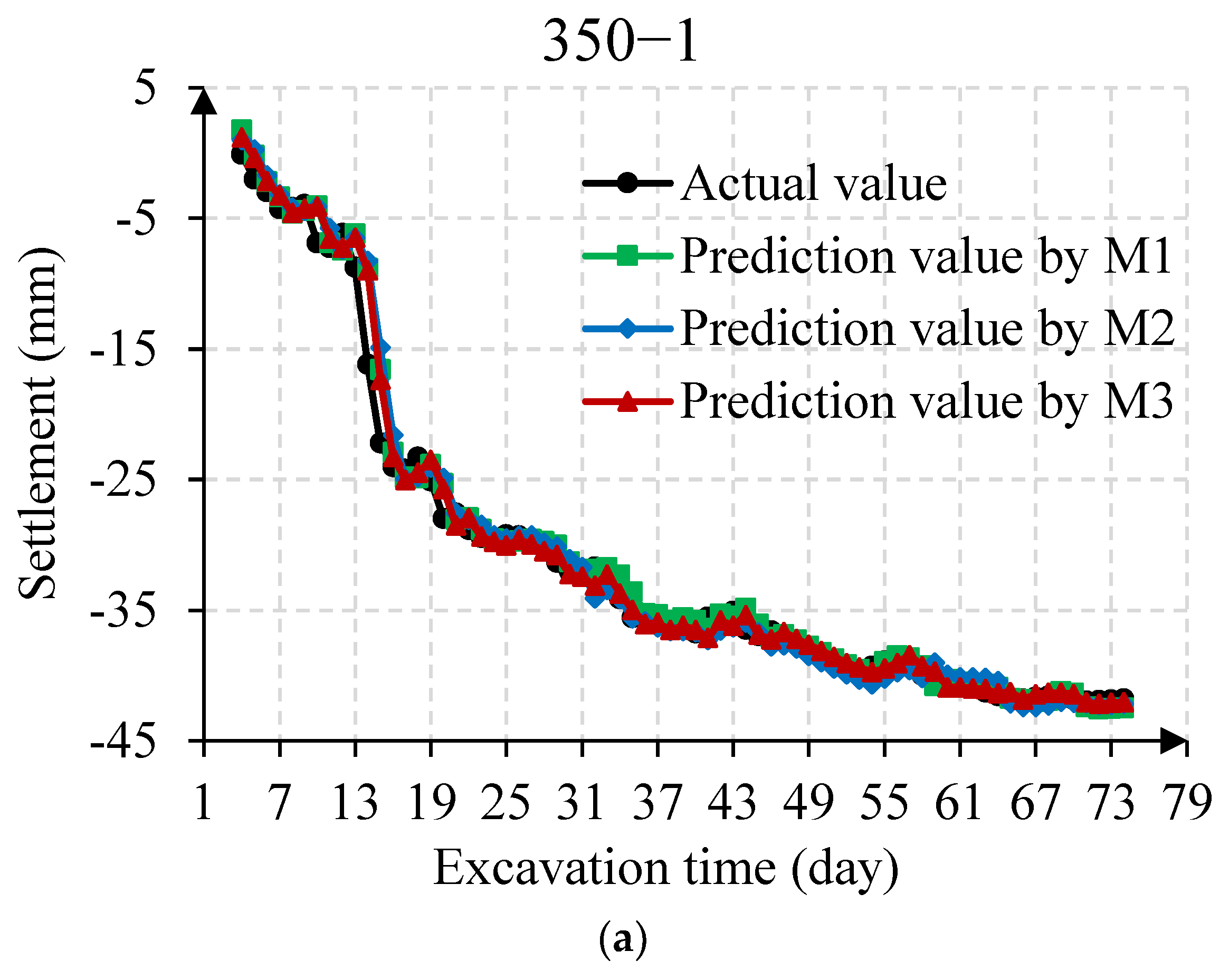
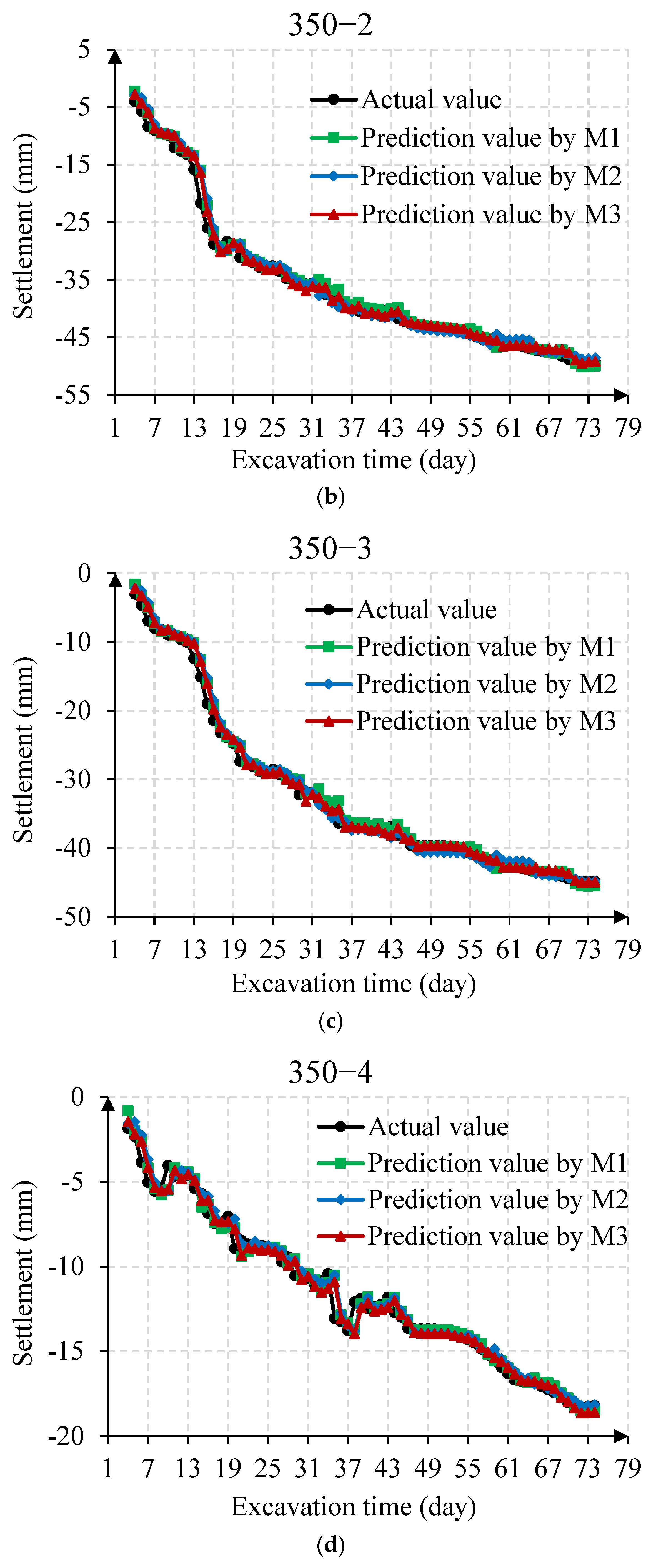
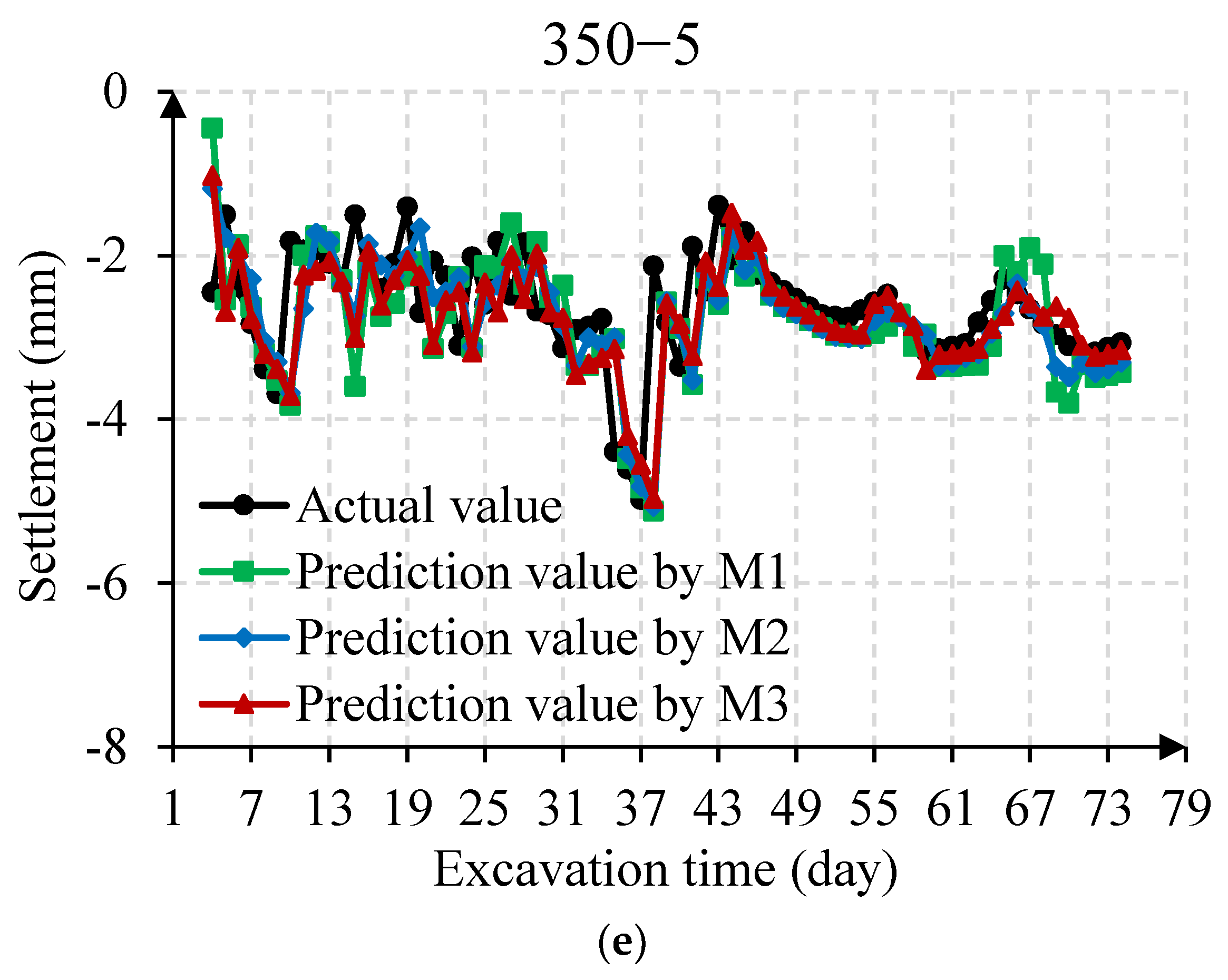
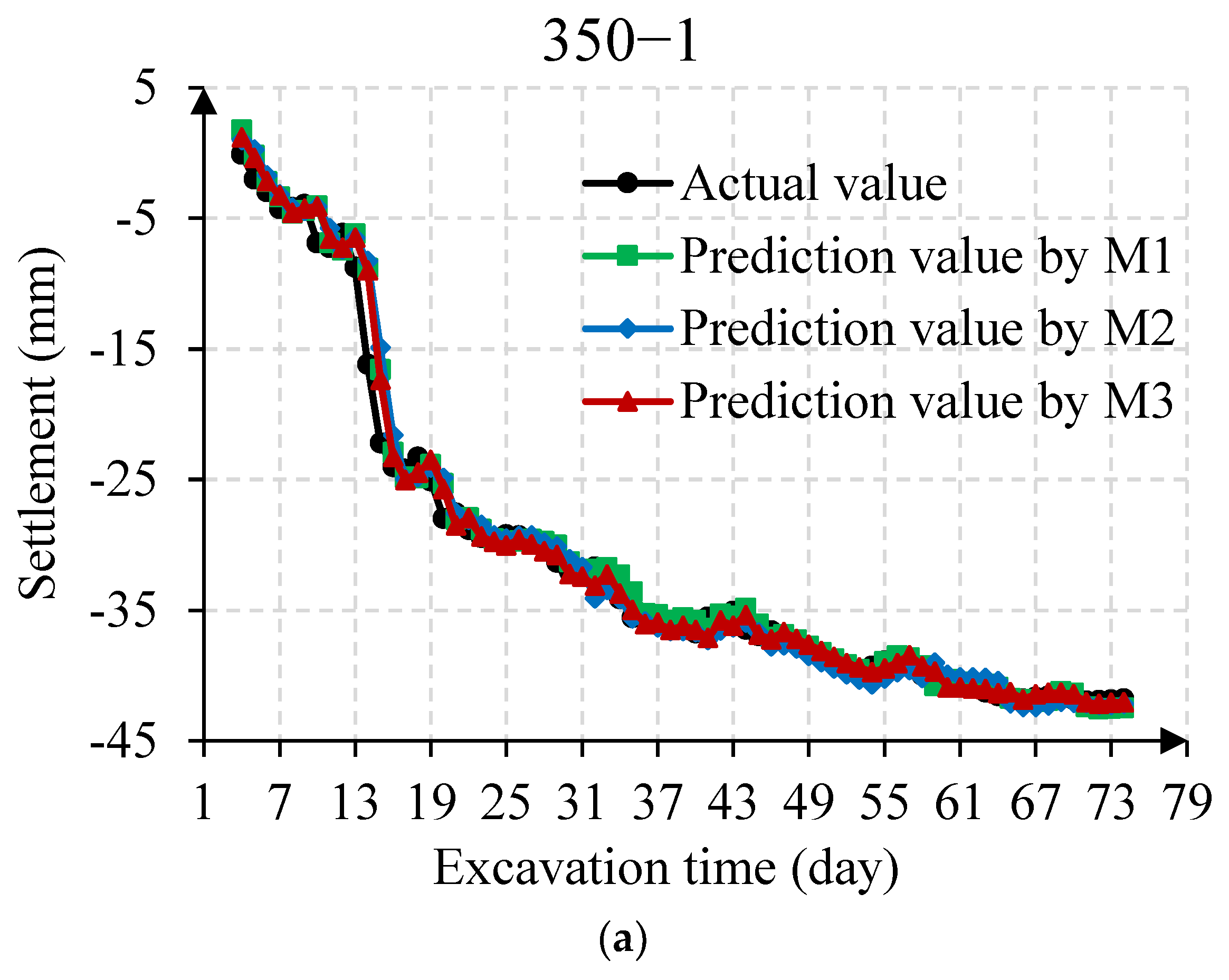
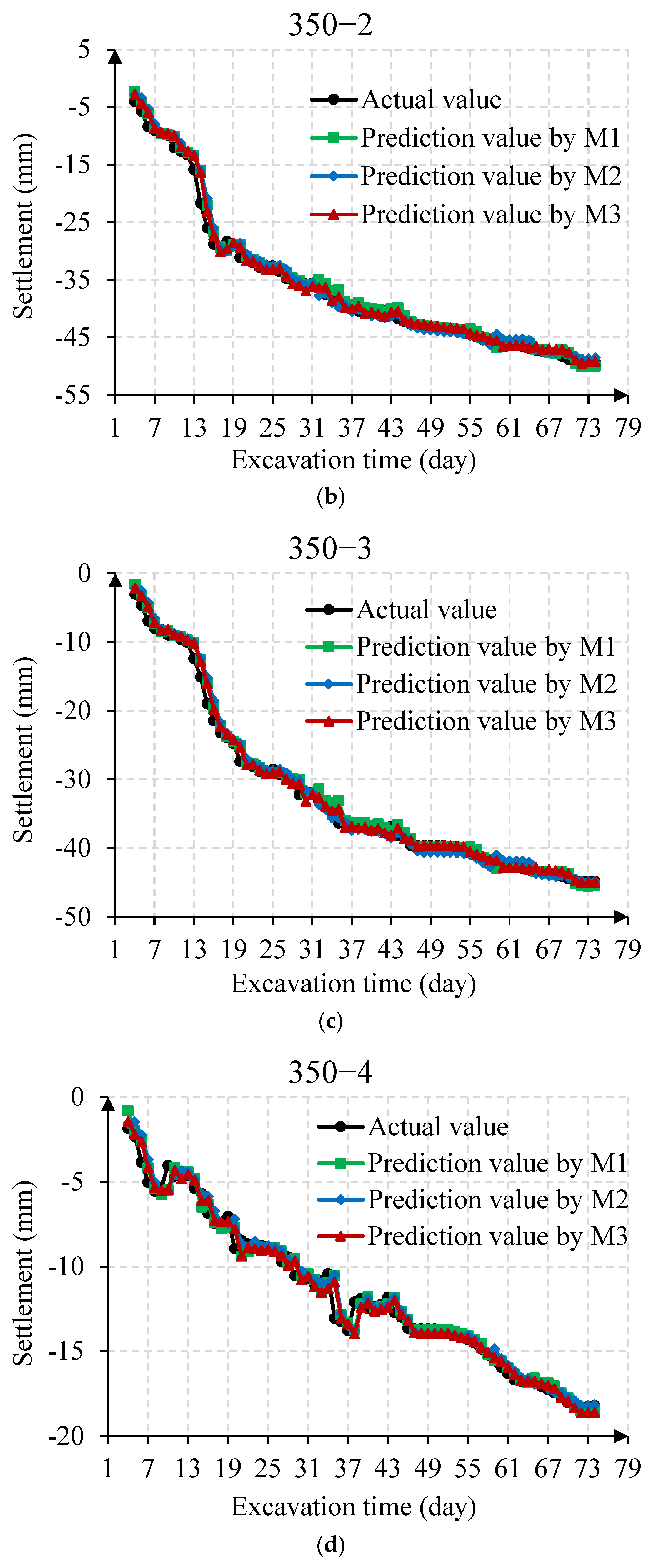
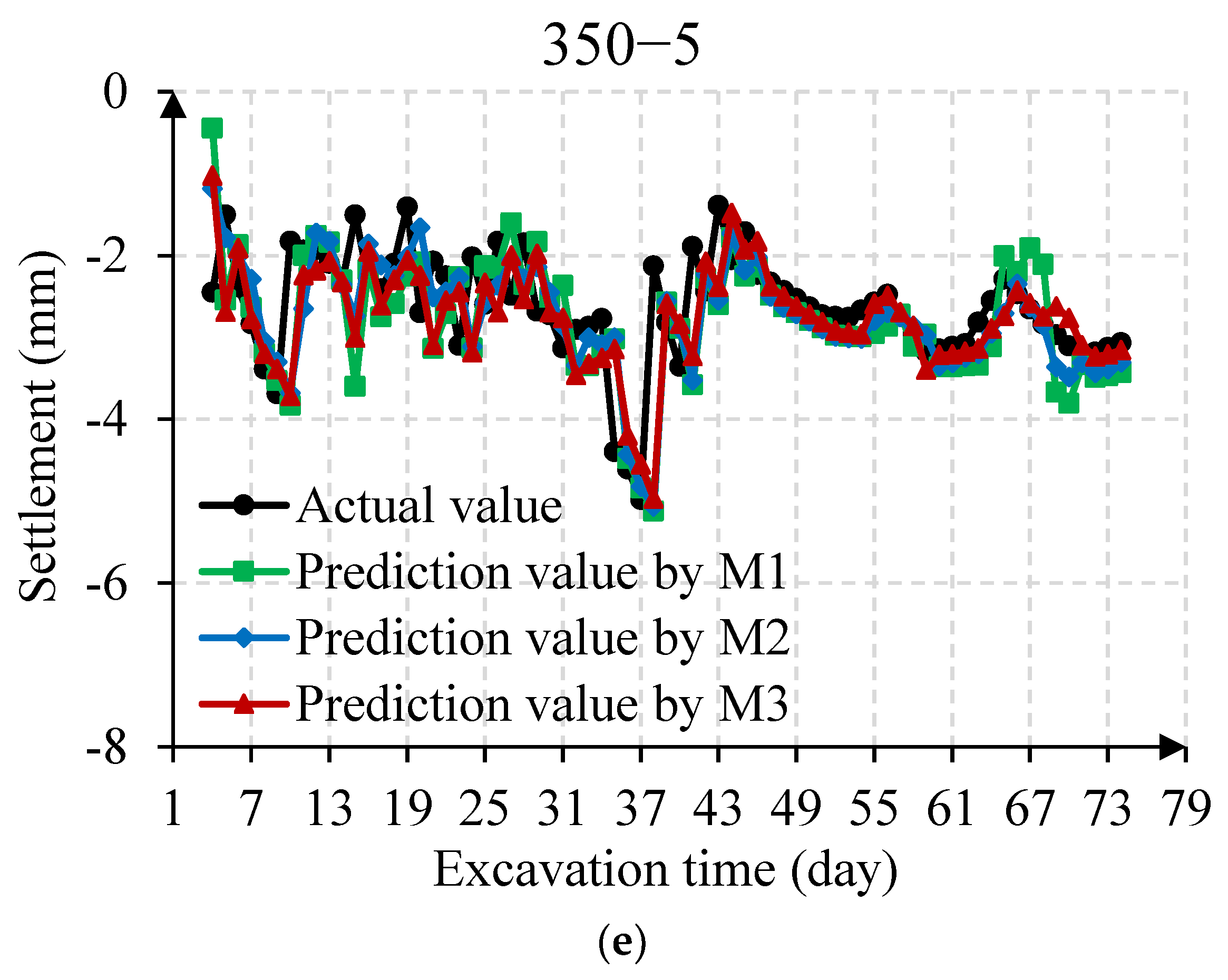
Figure 10. The impact of the source of training data on prediction accuracy was investigated by comparing prediction accuracies of three BPNNs, namely M1, M2, and M3, where these three models were trained using data collected from the strong influence zone, the weak influence zone, and both zones, respectively. The size of the training dataset for each BPNN was 6000. In the proposed case study, 350–1, 350–2, and 350–3 were located in the strong influence zone, while 350–4 and 350–5 were located in the weak influence zone, and the prediction results for these five settlement observation points were shown in
Figure 11 and
Table 4.
Comparing the average prediction errors of M1 and M2, it can be found that the prediction error of M1 was smaller than the prediction error of M2 in the strong influence zone, while the opposite was true in the weak influence zone. Specifically, the values of of M1 and M2 in the strong influence zone were 0.80 mm and 0.94 mm, respectively, while the values of of M1 and M2 in the weak influence zone were 0.52 mm and 0.44 mm, respectively. This result indicates that the source of training data can markedly affect the accuracy of BPNNs in predicting ground settlements in different zones. Additionally, the average prediction error of M3 was smaller than the average prediction errors of M1 and M2 at all five settlement observation points. Thus, it can be concluded that enlarging the source of training data can aid in the improvement of BPNNs’ settlement prediction accuracy.
5. Conclusions
Accurate prediction of ground settlements surrounding a foundation pit is a prerequisite for ensuring construction safety during excavation works. A majority of existing settlement prediction models focus on the prediction of the maximum ground settlement and are unable to perform dynamic and real-time predictions. Although some studies have declared the development of dynamic settlement prediction models by involving dynamically collected field settlement monitoring data in their proposed machine learning-based models, time-dependent influence factors that may significantly affect daily ground settlements were generally neglected in their models, limiting the settlement-prediction accuracy of their models. Accordingly, the proposed study developed a BPNN, taking into consideration various time-dependent influence factors, to improve the BPNN’s prediction accuracy on daily ground settlement. Data collected from a cut-and-cover highway tunnel project in western Hangzhou, China were used to demonstrate the feasibility and applicability of the proposed method.
The average absolute error and the average absolute error percentage of the prediction results of the optimum BPNN at five settlement observation points were 0.57 mm and 7.02%, respectively, indicating that the proposed BPNN can accurately predict daily ground settlements. Moreover, the impact of the size of the training dataset on BPNNs’ prediction accuracy was investigated, and the results demonstrated that increasing the number of training data can improve the prediction accuracy of BPNNs. Furthermore, based on the result of the sensitivity analysis of the impact of the types of input parameters on BPNNs’ prediction accuracy, one can conclude that time-dependent influence factors, including construction stages and weather conditions, play vital roles in establishing an optimum BPNN with high settlement prediction accuracy. Finally, the result of the sensitivity analysis of the impact of the source of training data on BPNNs’ prediction accuracy reveals that the BPNN with training data collected from multiple sources displays higher settlement prediction accuracy than those BPNNs trained using data collected from a single source.
It is hoped that the present study will serve as a basis for further research on the accurate and dynamic prediction of ground settlements during the construction of foundation pits. Specifically, the proposed BPNN-based method improves the settlement prediction accuracy of current models by taking into consideration time-dependent influence factors. Moreover, the proposed methodology enables decision makers to know ground settlements in advance and formulate timely and appropriate control measures. This makes sense in situations where it is expected that the execution process will have to be adjusted during the construction or if the initial observations show that the construction is not going according to predictions made in the design stage.
Nonetheless, it has some limitations that should be acknowledged. First, this study considers two types of time-dependent influence factors in the proposed BPNN, while other time-dependent influence factors that may contribute to the daily ground settlement, such as truckloads and temporary surcharge loads, were neglected due to the lack of data. The subsequent study may emphasize the collection of data with thorough details to take into consideration additional time-dependent influence factors in BPNNs. Moreover, the proposed BPNN performs well when the construction sequence and weather conditions are well known and followed during the execution; however, the deviation of the construction sequence and weather conditions may result in inaccurate results. Finally, this study focuses on the development of a BPNN for daily ground settlement prediction, while many other machine learning-based methods, such as SVMs, RFMs, and DTs, can be studied in the future. Moreover, comparisons among these methods in terms of settlement prediction accuracy and computational efficiency will be investigated.
Author Contributions
Conceptualization, Z.Z.; methodology, Z.Z.; software, Z.Z.; validation, Z.Z.; investigation, Z.Z.; resources, Z.Z.; data curation, Z.Z.; writing—original draft preparation, Z.Z.; writing—review and editing, R.X., J.W. and X.W.; supervision, R.X. and J.W.; project administration, R.X.; funding acquisition, Z.Z. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Engineering Research Project of the Department of Transportation of Zhejiang Province under grant number 2022-GCKY-11.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data of daily construction conditions and daily ground settlements are available from the corresponding author upon reasonable request.
Acknowledgments
The authors gratefully acknowledge the support for this research by the Department of Transportation of Zhejiang Province under Grant No. 2022-GCKY-11. The authors would also like to thank Changxin Lv and Honggang Zhai for their advice on this research.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zhang, W.; Zhang, R.; Wu, C.; Goh, A.T.C.; Lacasse, S.; Liu, Z.; Liu, H. State-of-the-art review of soft computing applications in underground excavations. Geosci. Front. 2020, 11, 1095–1106. [Google Scholar] [CrossRef]
- Liu, L.; Li, Z.; Cai, G.; Liu, X.; Yan, S. Humidity field characteristics in road embankment constructed with recycled construction wastes. J. Clean. Prod. 2020, 259, 120977. [Google Scholar] [CrossRef]
- Qiao, S.; Tan, J.; Zhang, Y.; Wan, L.; Zhang, M.; Tang, J.; He, Q. Settlement prediction of foundation pit excavation based on the GWO-ELM model considering different states of influence. Adv. Civ. Eng. 2021, 2021, 8896210. [Google Scholar] [CrossRef]
- Lambe, T.W. Predictions in soil engineering. Géotechnique 1973, 23, 151–202. [Google Scholar] [CrossRef] [Green Version]
- Loganathan, N. An Innovative Method for Assessing Tunnelling-Induced Risks to Adjacent Structures; Parsons Brinckerhoff Incorporated: New York, NY, USA, 2011. [Google Scholar]
- O’Reilly, M.P.; New, B. Settlements Above Tunnels in the United Kingdom-Their Magnitude and Prediction; 090048862X; Tunn: London, UK, 1982; pp. 173–181. [Google Scholar]
- Zhu, M.; Li, S.; Wei, X.; Wang, P. Prediction and Stability Assessment of Soft Foundation Settlement of the Fishbone-Shaped Dike Near the Estuary of the Yangtze River Using Machine Learning Methods. Sustainability 2021, 13, 3744. [Google Scholar] [CrossRef]
- Łodygowski, T.; Sumelka, W. Limitations in application of finite element method in acoustic numerical simulation. J. Theor. Appl. Mech. 2006, 44, 849–865. [Google Scholar]
- Zhang, L.; Wu, X.; Ji, W.; AbouRizk, S.M. Intelligent approach to estimation of tunnel-induced ground settlement using wavelet packet and support vector machines. J. Comput. Civ. Eng. 2017, 31, 04016053. [Google Scholar] [CrossRef]
- Yoo, C.; Lee, D. Deep excavation-induced ground surface movement characteristics–A numerical investigation. Comput. Geotech. 2008, 35, 231–252. [Google Scholar] [CrossRef]
- Zhang, L.; Wu, X.; Zhu, H.; AbouRizk, S.M. Perceiving safety risk of buildings adjacent to tunneling excavation: An information fusion approach. Autom. Constr. 2017, 73, 88–101. [Google Scholar] [CrossRef]
- Liu, J.; Qi, T.; Wu, Z. Analysis of ground movement due to metro station driven with enlarging shield tunnels under building and its parameter sensitivity analysis. Tunn. Undergr. Space Technol. 2012, 28, 287–296. [Google Scholar] [CrossRef]
- Darabi, A.; Ahangari, K.; Noorzad, A.; Arab, A. Subsidence estimation utilizing various approaches–A case study: Tehran No. 3 subway line. Tunn. Undergr. Space Technol. 2012, 31, 117–127. [Google Scholar] [CrossRef]
- Kim, S.-H.; Baek, S.-H.; Moon, H.-K. A study on the reinforcement effect of umbrella arch method and prediction of tunnel crown and surface settlement. In Underground Space Use. Analysis of the Past and Lessons for the Future, Two Volume Set; CRC Press: London, UK, 2005; pp. 245–251. [Google Scholar]
- Martos, F. Concerning an approximate equation of the subsidence trough and its time factors. In Proceedings of the International strata control congress, Leipzig, Germany, 14–16 October 1958; pp. 191–205. [Google Scholar]
- Litwiniszyn, J. Displacements in Loose Bodies as Stochastic Processes; Wiley-Interscience: Hoboken, NJ, USA, 1969. [Google Scholar]
- Peck, R.B. Deep excavations and tunneling in soft ground. In Proceedings of the 7th International Conference on Soil Mechanics and Foundation Engineering; Sociedad Mexicana de Mecanica: Mexico City, Mexico, 1969; pp. 225–290. [Google Scholar]
- Schmidt, B. Settlements and Ground Movements Associated with Tunneling in Soil; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 1969. [Google Scholar]
- Mohammadi, S.; Naseri, F.; Alipoor, S. Development of artificial neural networks and multiple regression models for the NATM tunnelling-induced settlement in Niayesh subway tunnel, Tehran. Bull. Eng. Geol. Environ. 2015, 74, 827–843. [Google Scholar] [CrossRef]
- Leu, S.-S.; Lo, H.-C. Neural-network-based regression model of ground surface settlement induced by deep excavation. Autom. Constr. 2004, 13, 279–289. [Google Scholar]
- Moeinossadat, S.R.; Ahangari, K. Estimating maximum surface settlement due to EPBM tunneling by Numerical-Intelligent approach–A case study: Tehran subway line 7. Transp. Geotech. 2019, 18, 92–102. [Google Scholar] [CrossRef]
- Forsat, M.; Taghipoor, M.; Palassi, M. 3D FEM Model on the Parameters’ Influence of EPB-TBM on Settlements of Single and Twin Metro Tunnels During Construction. Int. J. Pavement Res. Technol. 2021, 15, 525–538. [Google Scholar] [CrossRef]
- Ranken, R.E.; Ghaboussi, J. Tunnel Design Considerations: Analysis of Stresses and Deformations Around Advancing Tunnels, Report No. FRA-OR & D75-84; US Department of Transportation: Washington, DC, USA, 1975.
- Moeinossadat, S.R.; Ahangari, K.; Shahriar, K. Modeling maximum surface settlement due to EPBM tunneling by various soft computing techniques. Innov. Infrastruct. Solut. 2018, 3, 10. [Google Scholar] [CrossRef]
- Hocking, G. Three-dimensional elastic stress distribution around the flat end of a cylindrical cavity. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1976, 13, 331–337. [Google Scholar] [CrossRef]
- Garner, C.D.; Coffman, R.A. Subway tunnel design using a ground surface settlement profile to characterize an acceptable configuration. Tunn. Undergr. Space Technol. 2013, 35, 219–226. [Google Scholar] [CrossRef]
- Jan, J.; Hung, S.-L.; Chi, S.; Chern, J. Neural network forecast model in deep excavation. J. Comput. Civ. Eng. 2002, 16, 59–65. [Google Scholar] [CrossRef] [Green Version]
- Park, S.-S.; Ogunjinmi, P.D.; Woo, S.-W.; Lee, D.-E. A simple and sustainable prediction method of liquefaction-induced settlement at Pohang using an artificial neural network. Sustainability 2020, 12, 4001. [Google Scholar] [CrossRef]
- Armaghani, D.J.; Asteris, P.G.; Fatemi, S.A.; Hasanipanah, M.; Tarinejad, R.; Rashid, A.S.A.; Huynh, V.V. On the use of neuro-swarm system to forecast the pile settlement. Appl. Sci. 2020, 10, 1904. [Google Scholar] [CrossRef] [Green Version]
- Moghaddasi, M.R.; Noorian-Bidgoli, M. ICA-ANN, ANN and multiple regression models for prediction of surface settlement caused by tunneling. Tunn. Undergr. Space Technol. 2018, 79, 197–209. [Google Scholar] [CrossRef]
- Zhang, C.; Li, J.-z.; Yong, H. Application of optimized grey discrete Verhulst–BP neural network model in settlement prediction of foundation pit. Environ. Earth Sci. 2019, 78, 441. [Google Scholar] [CrossRef]
- Jun, Y.; Haiming, C. Artificial neural network’s application in intelligent prediction of surface settlement induced by foundation pit excavation. In Proceedings of the 2009 Second International Conference on Intelligent Computation Technology and Automation, Changsha, China, 10–11 October 2009; pp. 303–305. [Google Scholar]
- Cui, G.; Xiong, S.; Zhou, C.; Liu, Z. Research on HC-LSSVM Model for Soft Soil Settlement Prediction Based on Homotopy Continuation Method. Appl. Sci. 2021, 11, 10666. [Google Scholar] [CrossRef]
- Ocak, I.; Seker, S.E. Calculation of surface settlements caused by EPBM tunneling using artificial neural network, SVM, and Gaussian processes. Environ. Earth Sci. 2013, 70, 1263–1276. [Google Scholar] [CrossRef]
- Cheng, M.-Y.; Wu, Y.-W. Prediction of diaphragm wall deflection in deep excavations using evolutionary support vector machine inference model (ESIM). In Proceedings of the 26th Int. Symp. on Automation and Robotics in Construction (ISARC 2009), Austin, TX, USA, 24–27 June 2009. [Google Scholar]
- Chen, R.; Zhang, P.; Wu, H.; Wang, Z.; Zhong, Z. Prediction of shield tunneling-induced ground settlement using machine learning techniques. Front. Struct. Civ. Eng. 2019, 13, 1363–1378. [Google Scholar] [CrossRef]
- Mahmoodzadeh, A.; Mohammadi, M.; Daraei, A.; Ali, H.F.H.; Al-Salihi, N.K.; Omer, R.M.D. Forecasting maximum surface settlement caused by urban tunneling. Autom. Constr. 2020, 120, 103375. [Google Scholar] [CrossRef]
- Wang, F.; Gou, B.; Qin, Y. Modeling tunneling-induced ground surface settlement development using a wavelet smooth relevance vector machine. Comput. Geotech. 2013, 54, 125–132. [Google Scholar] [CrossRef]
- Xie, X.; Pan, C. Safety Prediction of Deep Foundation Pit Based on Neural Network and Entropy Fuzzy Evaluation. In Proceedings of the E3S Web of Conferences, Yaounde, Cameroon, 18 November 2021. [Google Scholar]
- O’Rourke, T.D. Ground movements caused by braced excavations. J. Geotech. Eng. Div. 1981, 107, 1159–1178. [Google Scholar] [CrossRef]
- Seo, M.-W.; Olson, S.M.; Yang, K.S.; Kim, M.-M. Sequential analysis of ground movements at three deep excavation sites with mixed ground profiles. J. Geotech. Geoenviron. Eng. 2010, 136, 656–668. [Google Scholar] [CrossRef]
- Rumelhart, D.E.; Hinton, G.E.; McClelland, J.L. A general framework for parallel distributed processing. Parallel Distrib. Process. Explor. Microstruct. Cogn. 1986, 1, 26. [Google Scholar]
- Hertz, J.; Krogh, A.; Palmer, R.G.; Horner, H. Introduction to the theory of neural computation. Phys. Today 1991, 44, 70. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Yan, B.; Zhang, C.; Wang, L.; Ning, G.; Yu, B. Displacement prediction of tunnel surrounding rock: A comparison of support vector machine and artificial neural network. Math. Probl. Eng. 2014, 2014. [Google Scholar] [CrossRef]
- Lai, J.; Qiu, J.; Feng, Z.; Chen, J.; Fan, H. Prediction of soil deformation in tunnelling using artificial neural networks. Comput. Intell. Neurosci. 2016, 2016. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.-S.; Kim, B.-T. Prediction of relative crest settlement of concrete-faced rockfill dams analyzed using an artificial neural network model. Comput. Geotech. 2008, 35, 313–322. [Google Scholar] [CrossRef]
- Mukherjee, A.; Deshpande, J. Application of artificial neural networks in structural design expert systems. Comput. Struct. 1995, 54, 367–375. [Google Scholar] [CrossRef]
- Adeli, H.; Seon Park, H. Counterpropagation neural networks in structural engineering. J. Struct. Eng. 1995, 121, 1205–1212. [Google Scholar] [CrossRef]
- MOHURD. Technical Standard for Monitoring of Building Excavation Engineering; MOHURD: Beijing, China, 2020. [Google Scholar]
- MOHURD. Code for Monitoring Measurement of Urban Rail Transit Engineering; MOHURD: Beijing, China, 2014. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}