
Adaptive Model Output Following Control for a Networked Thermostat †

 , , , and
, , , and
Abstract
:1. Introduction
2. Networked Thermostat System
- (1)
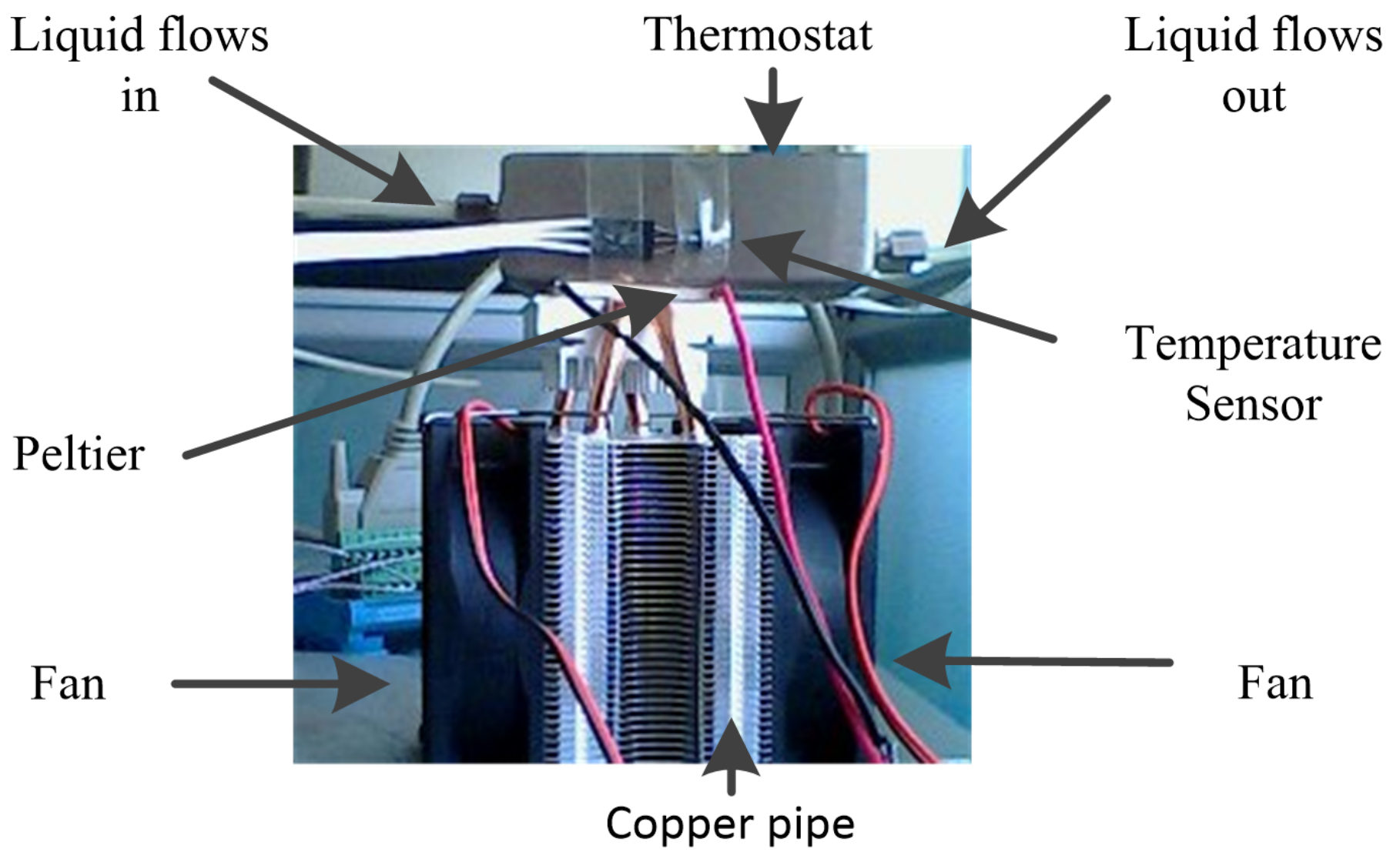
- Thermostat: It is a container that ensures the temperature of the liquid flowing out is always the same as desired. While flowing from one side to another side, the liquid will be cooled by the Peltier device.
- (2)
- Temperature Sensor: LM35 Precision Centigrade Temperature Sensor is used to collect the temperature of the thermostat, whose voltage output increases linearly with the temperature. It is equipped at the side where liquid flows out. Its voltage output range 0–1 V corresponds to the temperature range 0–100 C, and the measurement error is C.
- (3)
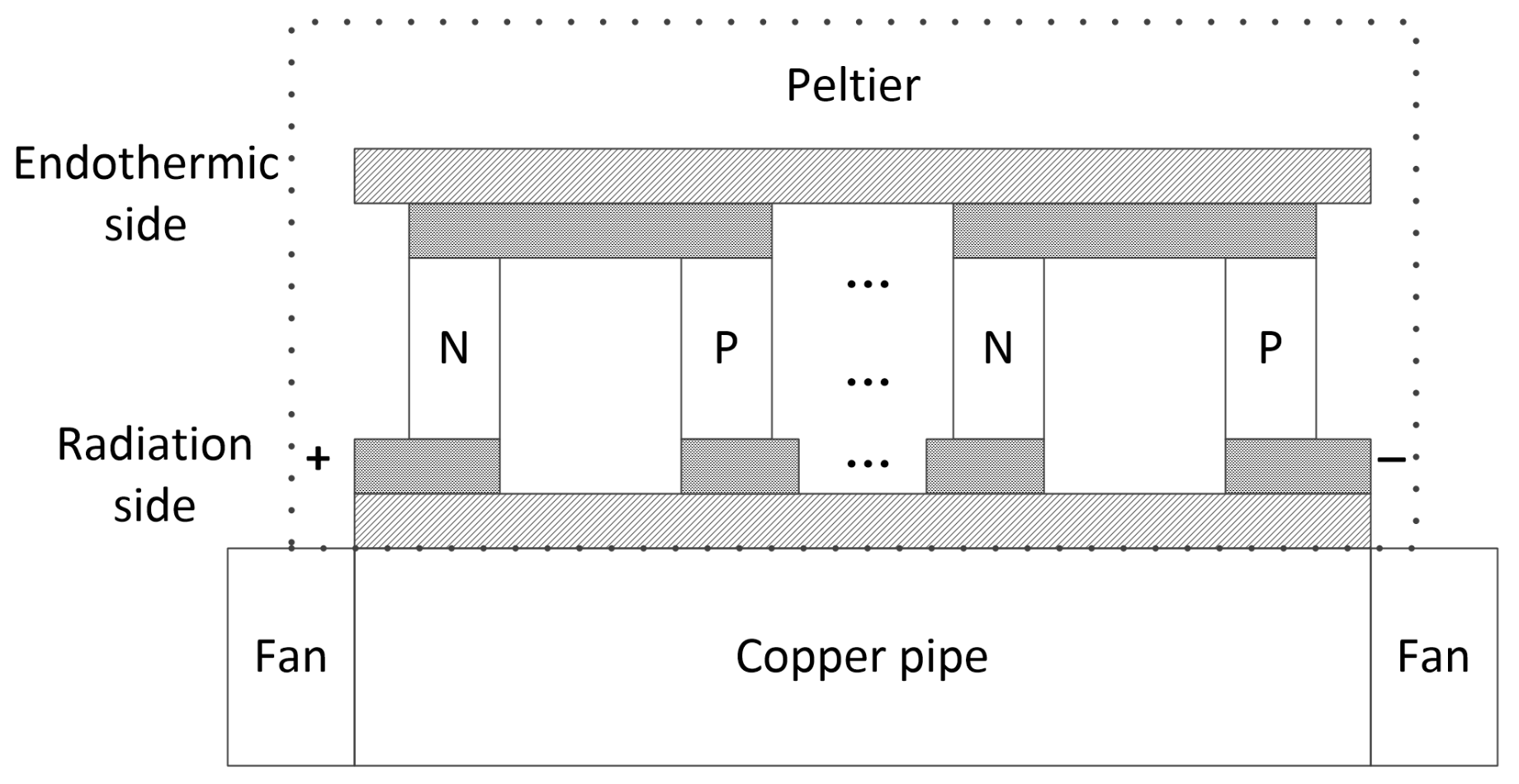
- Peltier device: As shown in Figure 3, the Peltier device consists of a Peltier, a copper pipe, and two fans. The working voltage of the Peltier is 12 V. When current flows through the Peltier, the temperature at the endothermic side will decrease, and the other side radiates energy into the air. Its endothermic side is close to the thermostat. To improve the cooling ability, the fans and copper pipe is used to decrease the temperature on the radiation side. In this paper, the Peltier is controlled by pulse width modulation (PWM) produced by the PCI-1760U board.
- (4)
- PC1: It is used to receive the temperature of the thermostat through the network, run the proposed algorithm, and then return the result through the network.
- (5)
- PC2: This PC receives data sent by the remote computer PC1 over the network, and outputs the PWM wave to control the PCI-1760U board based on the proposed method. Further, it commands the PCL-812PG board to sample the voltage amplified by the signal conditioning board and send it over the network to the remote computer, PC1.
- (6)
- Signal conditioning board: In order to improve the precision of temperature, the voltage output of the temperature sensor is amplified from 0–1 to 0–5 V. Because the power provided by the PCI-1760U board is not enough for the Peltier, the PWM amplitude is converted from 5 to 12 V by the signal conditioning board.
- (7)
- PCL-812PG board: It is inserted in PC2 and used to collect the temperature information from the signal conditioning board by a 12-bit analog-to-digital converter. Its voltage input range is 0–5 V.
- (8)
- PCI-1760U board: It can produce PWM used to control the thermostat temperature. Its voltage is 5 V and the period is set to 10 ms.
- (9)
- Network system: It is designed based on a network platform HORB based on the Java programming language. On this platform, a server is designed to manage tasks from local and remote terminals. This platform packets all the communication protocols, primary data processing, and remote function call. The only thing for the two PCs is to provide their IP addresses and tasks to the server at the beginning of the experiments.
3. Modelling
3.1. Peltier Model
3.2. Thermostat Model
3.3. Networked System Model
4. Adaptive Model Output Following Control
4.1. Compensator
4.2. Robust Feedback Controller
4.3. System Identification
4.4. Adaptation
5. Simulation and Experimental Results
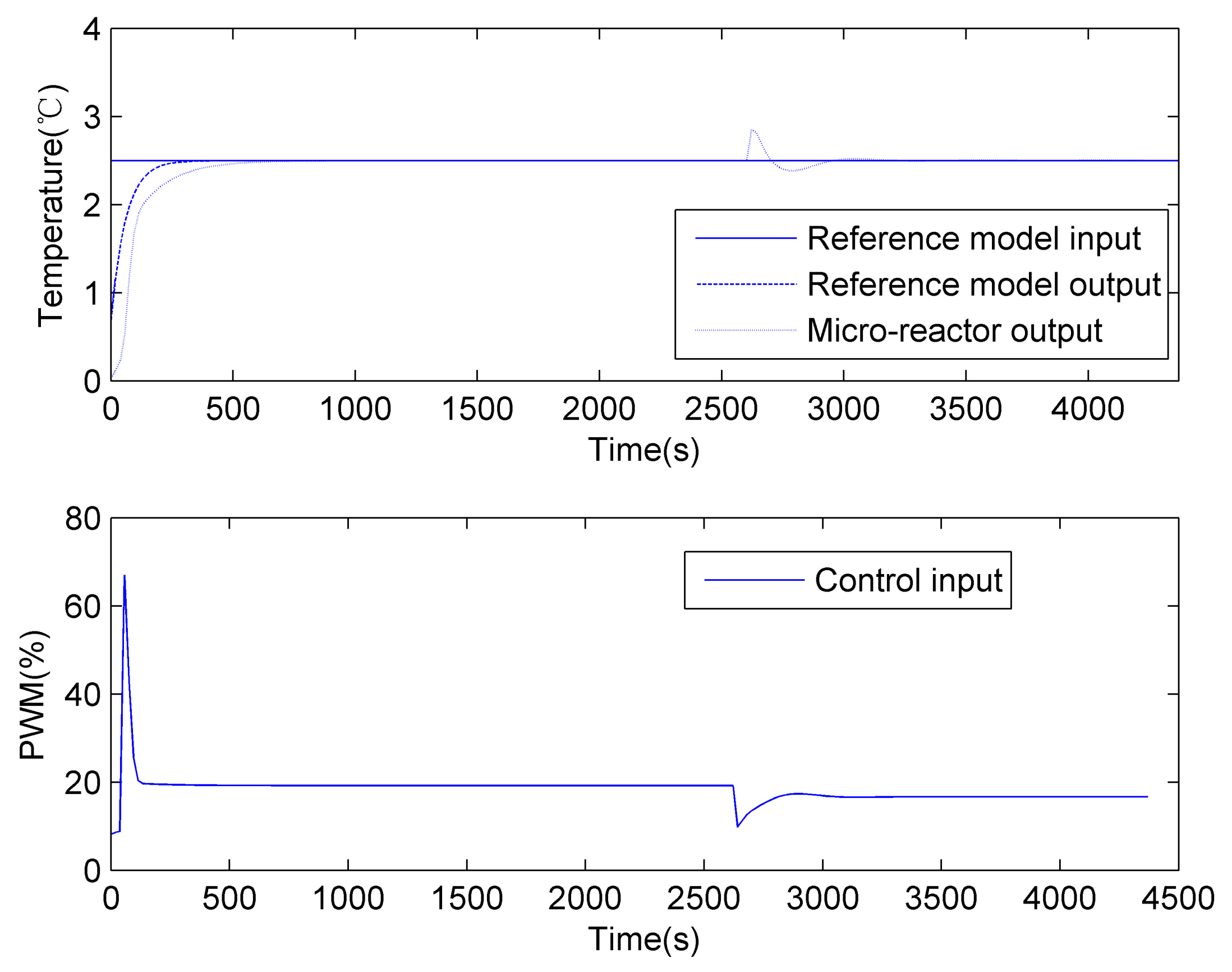
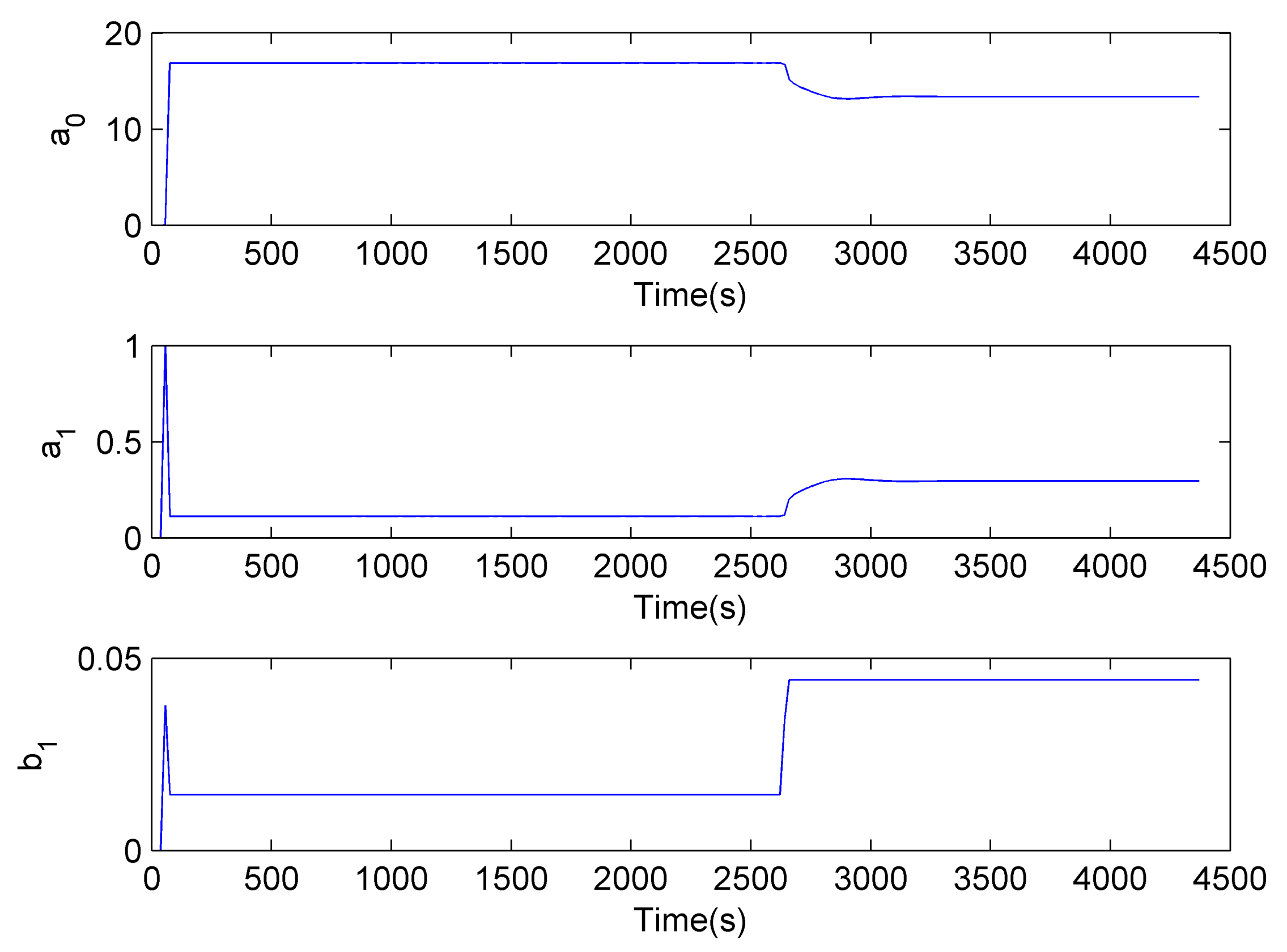
5.1. Simulation Results
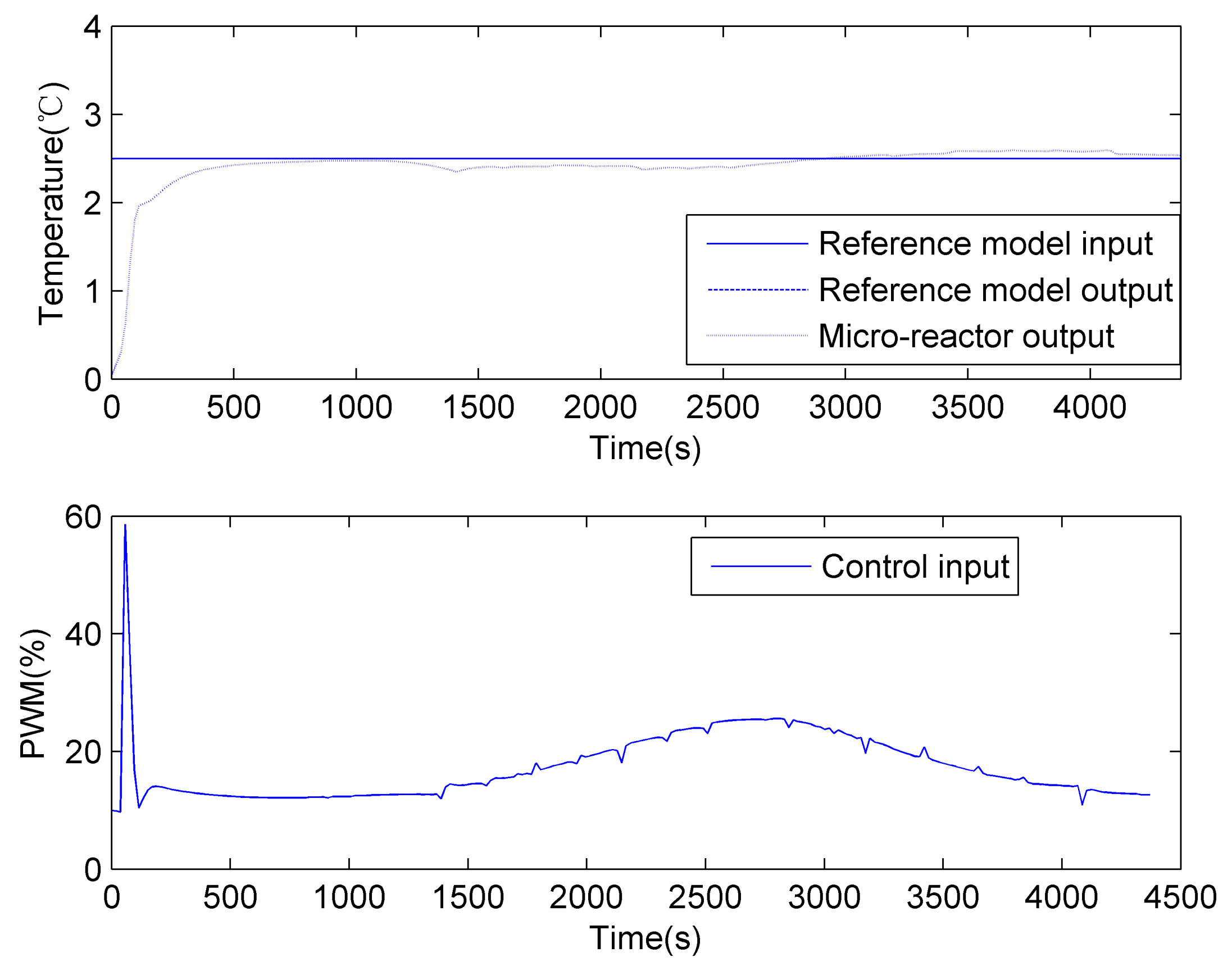
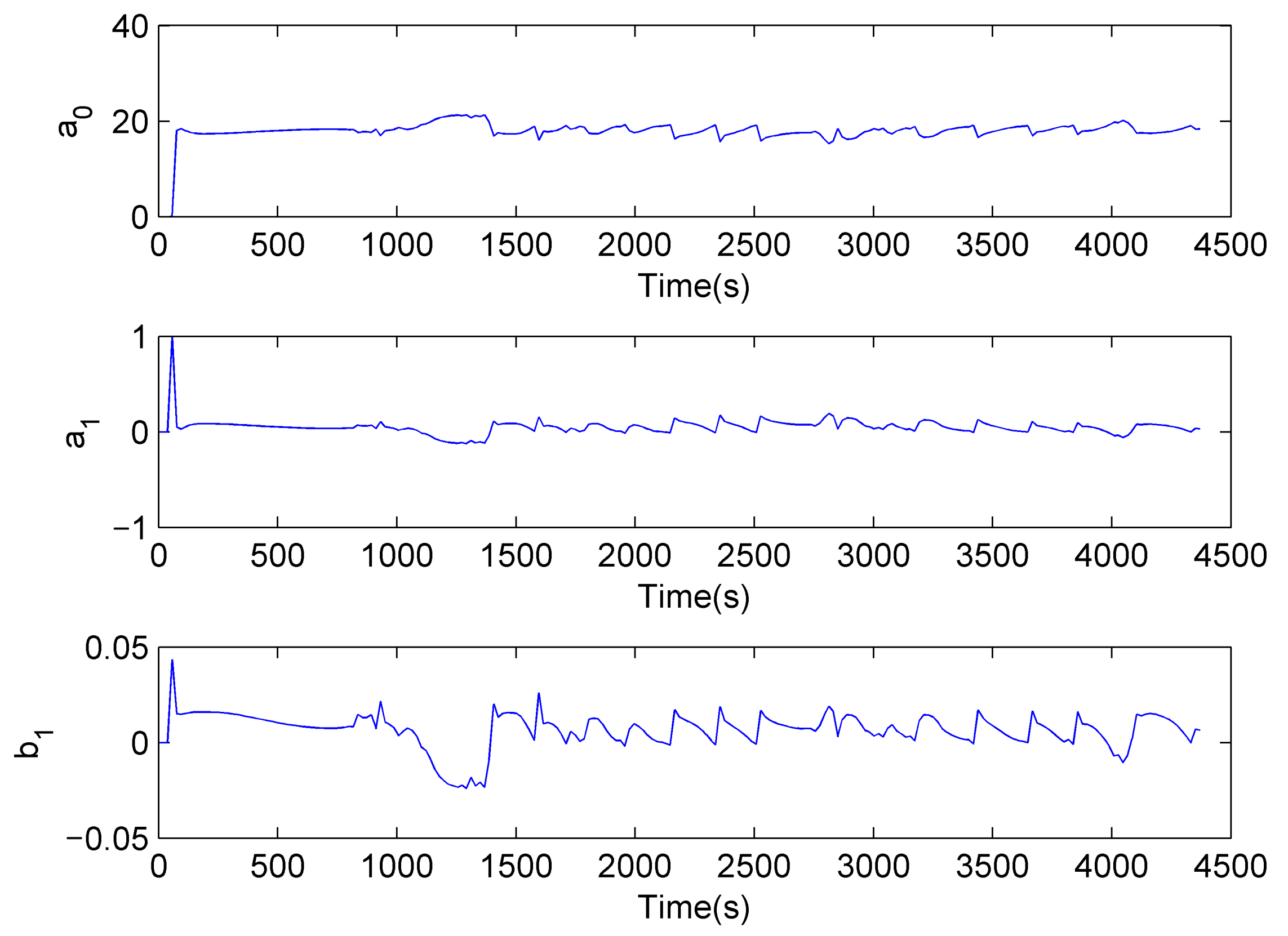
5.2. Experimental Results
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhang, X.M.; Han, Q.L.; Ge, X.; Ding, L. Resilient control design based on a sampled-data model for a class of networked control systems under denial-of-service attacks. IEEE Trans. Cybern. 2019, 50, 3616–3626. [Google Scholar] [CrossRef] [PubMed]
- Peng, C.; Sun, H. Switching-like event-triggered control for networked control systems under malicious denial of service attacks. IEEE Trans. Autom. Control 2020, 65, 3943–3949. [Google Scholar] [CrossRef]
- Zhang, X.M.; Han, Q.L.; Ge, X.; Ding, D.; Ding, L.; Yue, D.; Peng, C. Networked control systems: A survey of trends and techniques. IEEE/CAA J. Autom. Sin. 2020, 7, 1–17. [Google Scholar] [CrossRef]
- Lin, H.; Su, H.; Chen, M.Z.; Shu, Z.; Lu, R.; Wu, Z.G. On stability and convergence of optimal estimation for networked control systems with dual packet losses without acknowledgment. Automatica 2018, 90, 81–90. [Google Scholar] [CrossRef] [Green Version]
- Feng, S.; Cetinkaya, A.; Ishii, H.; Tesi, P.; De Persis, C. Networked control under DoS attacks: Tradeoffs between resilience and data rate. IEEE Trans. Autom. Control 2020, 66, 460–467. [Google Scholar] [CrossRef]
- Ferrari, P.; Sisinni, E.; Bellagente, P.; Rinaldi, S.; Pasetti, M.; de Sá, A.O.; Machado, R.C.; Carmo, L.F.d.C.; Casimiro, A. Model-based stealth attack to networked control system based on real-time Ethernet. IEEE Trans. Ind. Electron. 2020, 68, 7672–7683. [Google Scholar] [CrossRef]
- Cao, J.; Ding, D.; Liu, J.; Tian, E.; Hu, S.; Xie, X. Hybrid-triggered-based security controller design for networked control system under multiple cyber attacks. Inf. Sci. 2021, 548, 69–84. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hamdan, M.M. Fundamental issues in networked control systems. IEEE/CAA J. Autom. Sin. 2018, 5, 902–922. [Google Scholar] [CrossRef]
- Li, M.; Chen, Y. Challenging research for networked control systems: A survey. Trans. Inst. Meas. Control 2019, 41, 2400–2418. [Google Scholar] [CrossRef]
- Hu, J.; Zhang, H.; Liu, H.; Yu, X. A survey on sliding mode control for networked control systems. Int. J. Syst. Sci. 2021, 52, 1129–1147. [Google Scholar] [CrossRef]
- Tian, E.; Wang, K.; Zhao, X.; Shen, S.; Liu, J. An improved memory-event-triggered control for networked control systems. J. Frankl. Inst. 2019, 356, 7210–7223. [Google Scholar] [CrossRef]
- Precup, R.E.; Preitl, S.; Petriu, E.; Bojan-Dragos, C.A.; Szedlak-Stinean, A.I.; Roman, R.C.; Hedrea, E.L. Model-based fuzzy control results for networked control systems. Rep. Mech. Eng. 2020, 1, 10–25. [Google Scholar] [CrossRef]
- Song, J.S.; Chang, X.H. H∞ controller design of networked control systems with a new quantization structure. Appl. Math. Comput. 2020, 376, 125070. [Google Scholar] [CrossRef]
- Li, J.; Er, M.J.; Yu, H. Sampling and control strategy: Networked control systems subject to packet disordering. IET Control Theory Appl. 2016, 10, 674–683. [Google Scholar] [CrossRef]
- Li, M.; Chen, Y. Sliding mode predictive tracking control for DC permanent magnet motor in NCSs with random delay and packet dropouts. Int. J. Control. Autom. Syst. 2017, 15, 2723–2732. [Google Scholar] [CrossRef]
- Cuenca, A.; Alcaina, J.; Salt, J.; Casanova, V.; Pizá, R. A packet-based dual-rate PID control strategy for a slow-rate sensing Networked Control System. ISA Trans. 2018, 76, 155–166. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Peng, C.; Wu, M.; Xie, X.; Wang, Y.L. Event-triggered predictive control for networked nonlinear systems with imperfect premise matching. IEEE Trans. Fuzzy Syst. 2018, 26, 2797–2806. [Google Scholar] [CrossRef]
- Wang, K.; Tian, E.; Liu, J.; Wei, L.; Yue, D. Resilient control of networked control systems under deception attacks: A memory-event-triggered communication scheme. Int. J. Robust Nonlinear Control 2020, 30, 1534–1548. [Google Scholar] [CrossRef]
- Yue, D.; Han, Q.L.; Lam, J. Network-based robust H∞ control of systems with uncertainty. Automatica 2005, 41, 999–1007. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Morimoto, A.; Wen, S. Model output following control of a networked thermal process. In Proceedings of the International Conference on Networking, Sensing and Control, Okayama, Japan, 26–29 March 2009; pp. 81–86. [Google Scholar]
- Wang, H.; Liu, P.X.; Shi, P. Observer-based fuzzy adaptive output-feedback control of stochastic nonlinear multiple time-delay systems. IEEE Trans. Cybern. 2017, 47, 2568–2578. [Google Scholar] [CrossRef]
- Li, M.; Chen, Y. Robust tracking control of networked control systems with communication constraints and external disturbance. IEEE Trans. Ind. Electron. 2017, 64, 4037–4047. [Google Scholar] [CrossRef]
- Steinberger, M.; Horn, M.; Ferrara, A. Adaptive control of multivariable networked systems with uncertain time delays. IEEE Trans. Autom. Control 2021, 67, 489–496. [Google Scholar] [CrossRef]
- Wu, C.; Liu, J.; Jing, X.; Li, H.; Wu, L. Adaptive fuzzy control for nonlinear networked control systems. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2420–2430. [Google Scholar] [CrossRef]
- Liu, Y.A.; Tang, S.; Liu, Y.; Kong, Q.; Wang, J. Extended dissipative sliding mode control for nonlinear networked control systems via event-triggered mechanism with random uncertain measurement. Appl. Math. Comput. 2021, 396, 125901. [Google Scholar] [CrossRef]
- Liang, X.; Xu, J. Control for networked control systems with remote and local controllers over unreliable communication channel. Automatica 2018, 98, 86–94. [Google Scholar] [CrossRef] [Green Version]
- Yuan, Y.; Yuan, H.; Wang, Z.; Guo, L.; Yang, H. Optimal control for networked control systems with disturbances: A delta operator approach. IET Control Theory Appl. 2017, 11, 1325–1332. [Google Scholar] [CrossRef]
- Deng, M.; Iwai, Z.; Mizumoto, I. Simple adaptive control systems design for processes with uncertainty. Trans. Soc. Instrum. Control Eng. 1999, 35, 852–860. [Google Scholar] [CrossRef]
- Shah, S.; Iwai, Z.; Mizumoto, I.; Deng, M. Simple adaptive control of processes with time-delay. J. Process Control 1997, 7, 439–449. [Google Scholar] [CrossRef]
- Broussard, J.; O’Brien, M. Feedforward control to track the output of a forced model. IEEE Trans. Autom. Control 1980, 25, 851–853. [Google Scholar] [CrossRef]
- Vlaswinkel, M. Adaptive Network and System Identification for Wireless Networked Control Systems. Master’s Thesis, Eindhoven University of Technology, Eindhoven, The Netherlands, 2019. [Google Scholar]
- Jakowluk, W.; Godlewski, K. Robustness analysis of the estimators for the nonlinear system identification. Entropy 2020, 22, 834. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Goto, S. Operator based thermal control of an aluminum plate with a Peltier device. In Proceedings of the Second International Conference on Innovative Computing, Informatio and Control, Kumamoto, Japan, 5–7 September 2007; p. 319. [Google Scholar]
- Deng, M.; Wen, S.; Inoue, A. Operator-based robust nonlinear control for a Peltier actuated process. Meas. Control 2011, 44, 116–120. [Google Scholar] [CrossRef]
- Deng, M. Model output following control based on CGT approach for plants with time delays. Int. J. Syst. Sci. 1999, 30, 69–75. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| The outer length of thermostat | |
| The outer width of thermostat | |
| The outer height of thermostat | |
| The length of peltier | |
| The width of peltier | |
| The thickness of thermostat |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, H.; Jin, Y.; Liu, P.; Yu, J.; Zhao, R.; Yue, X.; Wen, S. Adaptive Model Output Following Control for a Networked Thermostat. Appl. Sci. 2022, 12, 6084. https://doi.org/10.3390/app12126084
Li H, Jin Y, Liu P, Yu J, Zhao R, Yue X, Wen S. Adaptive Model Output Following Control for a Networked Thermostat. Applied Sciences. 2022; 12(12):6084. https://doi.org/10.3390/app12126084
Chicago/Turabian StyleLi, Hongjun, Yingrui Jin, Ping Liu, Jun Yu, Ran Zhao, Xuebin Yue, and Shengjun Wen. 2022. "Adaptive Model Output Following Control for a Networked Thermostat" Applied Sciences 12, no. 12: 6084. https://doi.org/10.3390/app12126084
APA StyleLi, H., Jin, Y., Liu, P., Yu, J., Zhao, R., Yue, X., & Wen, S. (2022). Adaptive Model Output Following Control for a Networked Thermostat. Applied Sciences, 12(12), 6084. https://doi.org/10.3390/app12126084