1. Introduction
With the advantages of simple structure, high positioning accuracy, and fast dynamic response, the parallel mechanism has been extensively used in the fields of advanced manufacturing equipment, national defense and military, automobile manufacturing, aerospace, and motion simulation [
1,
2,
3]. In previous studies, researchers have explored parallel mechanisms from various aspects, especially in structural synthesis and design theory [
4,
5,
6], kinematics and dynamics studies [
7,
8,
9], singularity analysis [
10,
11,
12], operation mode studies [
13,
14], and efficient control strategies [
15,
16]. These studies provide a deep foundation for the development of parallel mechanisms.
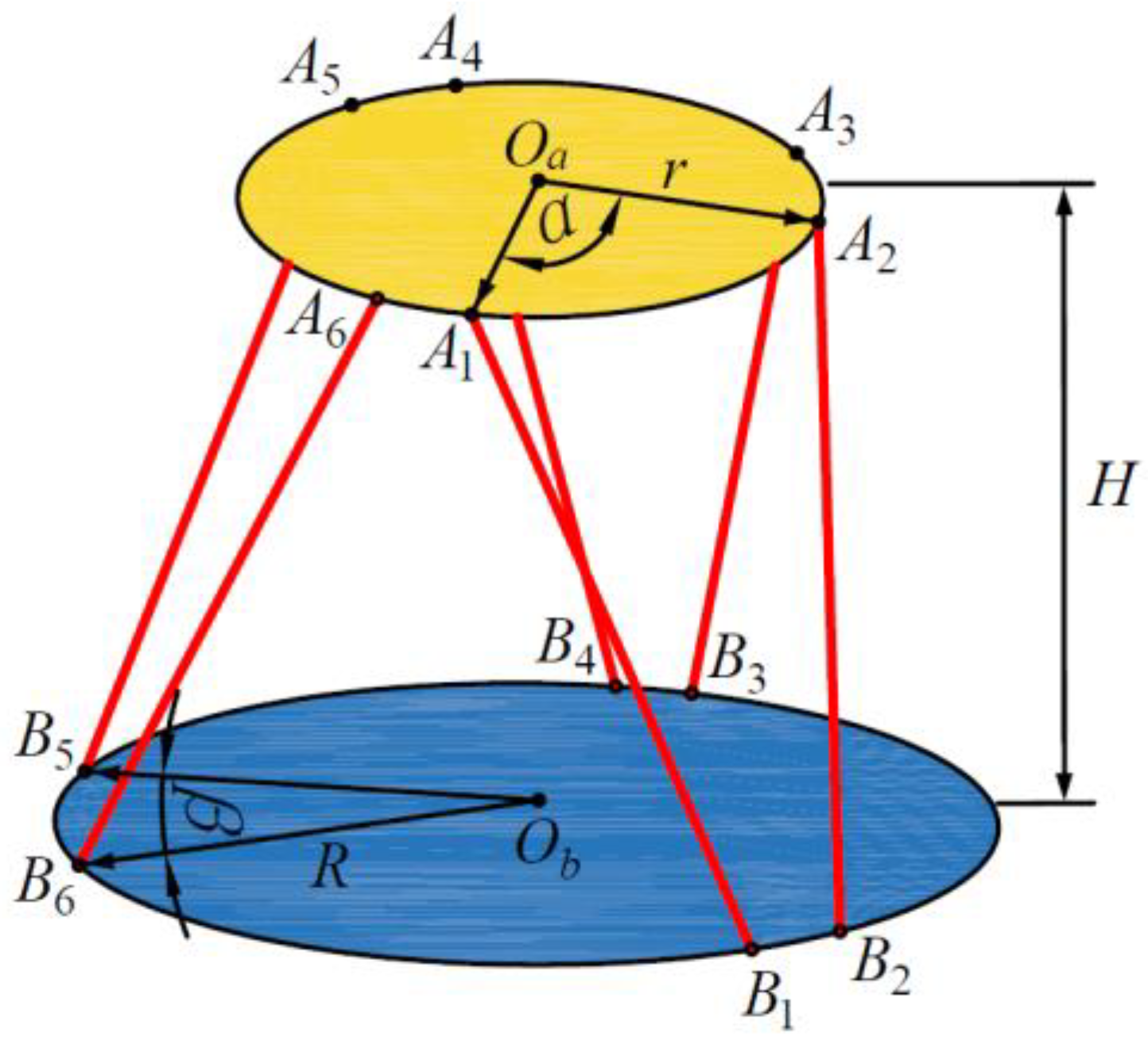
The main body of the 6-UPS parallel mechanism is composed of a mobile platform, a fixed platform, and six drive branch chains, where U stands for universal joint, P stands for prismatic pair, and S stands for spherical hinge. The 6-UPS parallel mechanism performance and its structural parameters are closely related. When the structural parameters are unreasonably designed, the mechanism’s performance will be significantly reduced. Therefore, researchers have also been working on the optimization design of the structure and performance of parallel mechanism, where the most commonly used optimization methods are divided into two categories: optimization methods based on objective functions and optimization methods based on performance atlas [
17,
18,
19].
The optimization method based on objective function is to build up the objective function and constraints according to the optimization index and then use the optimization algorithm to search for the optimal solution. The optimization methods based on objective function are mostly used in the case of many parameter variables and too complex objective function. When there are two or more objective functions, it is called a multi-objective optimization problem, and solving a multi-objective optimization problem is a process of finding the Pareto optimal solution [
20,
21,
22]. Qi et al. [
23] conducted a multi-objective optimization of a typical parallel tracking mechanism under comprehensive consideration of the kinematics, stiffness, workspace, and dynamic performances, while considering manufacturing and assembly errors. Zhang et al. [
24] used the PSO algorithm to perform multi-objective optimization of the workspace, dexterity, stiffness, energy efficiency, motion/force transfer efficiency, and inertial coupling index of the established 2RPU-2SPR super-constrained redundantly driven parallel mechanism. Mirshekari et al. [
25] studied the effects of different parameters, such as the rotation joint angle and spherical joint position of the 6-RUS parallel robot mobile platform on the workspace, kinematics and dynamics indices, and they used the bees algorithm approach to optimize the manipulator structure.
The optimization method based on performance atlas refers to intuitively expressing the relationship between design indices and design parameters in a limited design space, so as to obtain the performance atlas of the mechanism. Liu and Wang [
26] optimized the 3PRS mechanism and the spherical 5R parallel mechanism with 2-DOF by using the performance atlas method, so that they had better kinematic performance and force transmission performance in the workspace. Pan and Hou [
27] conducted a comprehensive study on a mobile complex multi-body system, through mechanism analysis and identification, introducing sensitivity analysis and extracting key design variables from global variables for multi-objective optimization design. Wang et al. [
28] took the motion/force transmissibility and the workspace range as the optimization objectives, respectively, expressing the relationship between the corresponding motion indices and structural parameters by using the performance atlas method and realized the optimal design of 3-PUU mechanism. However, there is a problem in the optimization method based on performance atlas, that is, when there are many characteristic parameters to be optimized, it cannot completely represent the performance atlas in a limited space.
In recent years, the approximate model technology has developed rapidly in multi-objective optimization [
29,
30]. By fitting the mathematical relationship between input and output, the approximate model technology can replace the real value with the predicted value of the approximate model within a certain error range, so as to effectively improve the calculation efficiency and simulation accuracy [
31,
32]. The widely used approximate models in engineering mainly include response surface method surrogate model, Kriging surrogate model, and radial basis function surrogate model [
33,
34]. Hu et al. [
35] developed a Latin hypercube design, Kriging interpolation, and neural network training (LKN) method based on the response surface method, taking into account both kinematic and dynamic performance indices, carrying out the robustness design of the 4PUS-1RPU parallel mechanism.
The Taguchi method was initially created for quality engineering to assess and produce better robustness, tolerance specification, and quality management of production processes [
36]. The Taguchi method does not rely on complex probabilistic or statistical analysis. It can mine the information of the whole parameter space through a little number of experiments to obtain the optimal solution of the experimental design [
37,
38]. Park et al. [
39] performed kinematic optimization of a redundantly driven parallel mechanism using the Taguchi method with the optimization objective of maximizing the total of energy efficiency and workspace. Wu et al. [
40] used the Taguchi method and Monte Carlo simulation method to optimize the 3-RRR parallel micro-movement platform iteratively and found the optimal geometric size of the flexure hinge. Shin et al. [
41] proposed an optimization method using the Taguchi method to optimize the redundantly driven parallel mechanism by studying the kinematic parameters of a planar 2-DOF parallel robot; the optimal parameter combination between the link length and stiffness was obtained.
The multi-objective optimization design problem is driven by many competitive standards, and although optimization algorithm can provide designers with a large number of non-dominated optimal solutions, designers still need to use engineering knowledge to independently choose the best compromise solution [
42]. Gray correlation analysis (GRA) has been widely used in various decision-making problems. Its basic idea is to use the linear interpolation between adjacent points of the sequence to map the discrete data to the geometry of the space and to determine the correlation between the sequences by calculating the distance between the reference sequence and the comparison sequence [
43,
44]. Dao and Huang [
45,
46] used optimization techniques, such as the Taguchi method, response surface method, GRA, and entropy weight measurement, to carry out a multi-objective optimization design for the 2-DOF flexible mechanism and the 2-DOF flexible mechanism with a modified double-lever amplification mechanism, respectively. Hsieh et al. [
47] used the GRA method to design the mechanical structure of the conical guide mechanism to solve the interference misalignment problem during excavator attachment assembly.
However, traditional optimization methods are generally only suitable for linear and simple systems, and when they are applied to multi-objective optimization problems, there will be some limitations, such as difficulty in solving and global optimal solutions being ignored [
48]. Although intelligent optimization methods outperform traditional optimization methods in solving multi-objective problems, they also have their own limitations, such as being time consuming and having poor convergence [
49]. In order to solve this problem, many scholars try to develop new optimization methods, among which the hybrid algorithm can better combine the optimization efficiency and accuracy, so as to solve the multi-objective optimization problem [
50,
51]. In addition, it also has great application prospects in multi-objective optimization design by combining multiple optimization methods. Wang et al. [
52] proposed an optimization method combining radial basis function neural network model, fuzzy subtractive clustering sequential sampling method, and NSGA-II, which is used to improve the calculation efficiency and accuracy of multi-objective optimization problems in engineering. Xiong et al. [
53] proposed a hybrid method combining contribution analysis, radial basis function neural-network-response surface method hybrid surrogate modeling method, and PSO algorithm for lightweight design of body front-end structures.
The above studies have carried out multi-objective optimization design of parallel mechanism from different aspects, such as the optimization method based on objective function, optimization method based on performance atlas, approximate model technology, Taguchi method, and gray relational analysis method. In order to further improve the optimization efficiency of the parallel mechanism, on the basis of the above research, this article conducts a multi-objective optimization design of the 6-UPS parallel mechanism based on the parametric modeling technology, the Taguchi method, and entropy-weighted gray relational analysis (EGRA) method. The parametric model of a 6-UPS parallel mechanism is established by ADAMS software, and the validity and accuracy of the parametric model are verified by theoretical calculation. By studying the association between the design variables and the objective function, the multi-objective optimization problem of parallel mechanism is transformed into a single-objective optimization problem based on the gray relational grade (GRG) by using the EGRA method to realize the multi-objective optimal design of the load-bearing capacity and motion range of the 6-UPS parallel mechanism.
2. Multi-Objective Optimization Design Method
Based on parametric modeling technology, the Taguchi method, and the EGRA method, the optimization design of 6-UPS parallel mechanism in this article is mainly divided into five steps, and the optimization design process is shown in
Figure 1.
Step 1: Parametric modeling and model validation. The key factors affecting the structural performance of 6-UPS parallel mechanism are found out through the mechanism configuration analysis, and then, the parametric model of the mechanism is created in ADAMS software, and the validity and accuracy of the parametric model are verified by comparing the simulation and theoretical calculation results.
Step 2: Establishing the mathematical model of optimal design. According to the structural parameters and expected structural performance of 6-UPS parallel mechanism, the mathematical models of design variables, objective functions, and constraints are created, and the corresponding design functions are established in ADAMS software.
Step 3: Research on the relationship between design variables and objective functions. By creating the motion law of the driving branch chain, the effect of a single design variable on the objective function is studied, so as to facilitate the subsequent transformation of the multi-objective problem into a single-objective optimization problem.
Step 4: Experiment design based on the Taguchi method. By studying the effect of a single design variable on the objective function, five factors and four levels are determined, and the experimental layout and optimization are carried out by the Taguchi method.
Step 5: EGRA obtains the optimal result. The GRG of each scheme in the Taguchi experimental design is obtained by GRA, and the optimization results are sorted. The average GRG of each design variable is obtained by factor effect analysis, and the optimal result is obtained.
7. Conclusions
In this article, the multi-objective optimization design of the 6-UPS parallel mechanism is carried out based on the parametric modeling technology, the Taguchi method and EGRA method. The parametric model of the 6-UPS parallel mechanism is established by ADAMS software, and the validity and accuracy of the parametric model are verified by theoretical calculation. The relationship between the design variables and the objective function is investigated by establishing the design variables, objective function, and constraints of the mechanism. Combining the Taguchi method and EGRA method, the multi-objective optimization problem is transformed into a single-objective optimization problem based on the GRG. The best combination of five design variables is determined through factor effect analysis. After the optimized design of the 6-UPS parallel mechanism, the peak force on the drive pair of the drive branch chain is reduced by 17.73%, and the minimum value of the projected angle and the minimum value of the average projected angle of the BCS relative to the ICS are increased by 27.36% and 36.17%, respectively, which significantly improves the load-bearing capacity of the 6-UPS parallel mechanism and expands the motion range of the mechanism.
To sum up, the method proposed in this article attempts to solve multi-objective optimization problems, such as nonlinear and large displacement. Since the multi-objective problem is transformed into a single-objective problem, good results can be obtained when solving nonlinear and complex optimization problems, and computing costs can be significantly reduced. Compared with other multi-objective optimization methods, the method proposed in this article is simpler and more convenient and can be efficiently used in the optimal design of multi-parameter parallel mechanisms, which has certain guiding significance for solving practical engineering problems. In the future, adding more experimental sequences to the experimental design, combining more effective optimization methods, or combining approximate model technology can obtain better optimization results.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}